Изобретение относится к области радиотехнической разведки и может быть использовано в средствах радиоэлектронного наблюдения за излучениями радиоэлектронных средств наземного, воздушного и морского базирования, в средствах радиоэлектронной борьбы в качестве источника информации о радиоэлектронной обстановке в зоне наблюдения, а также для контроля и анализа параметров сигналов излучающих радиоэлектронных средств и динамики их изменения в широком диапазоне разведываемых частот от 200 до 18000 МГц и определения координат источников радиоизлучения.
Известно устройство быстрого обнаружения сигнала, пеленгации и определения местоположения (патент DE 3639444, МПК G01S 5/04, опубл. 05.05.1988), которое представляет собой 2-канальный поисковый по частоте фазовый пеленгатор. К недостаткам данного устройства следует отнести низкую точность пеленгования, низкую вероятность обнаружения кратковременно излучаемых сигналов и сравнительно узкую полосу рабочих частот.
Известна станция радиотехнической разведки (патент RU 2136110, МПК H04K 3/00, опубл. 27.08.1999), включающая входной тракт, многоканальный частотно-избирательный разветвитель, каждый канал которого содержит первый смеситель с фильтром, второй смеситель, третий смеситель с фильтром, первый гетеродин и второй гетеродин, многоканальный сумматор, приемное устройство, анализирующее устройство и устройство запоминания и обработки информации. Недостатками известной станции радиотехнической разведки является низкая чувствительность и невозможность разведки всех типов сигналов.
Известна широкополосная станция радиотехнической разведки с высокой чувствительностью (патент RU 2390946, МПК H04K 3/00, опубл. 27.05.2010), содержащая антенно-фидерное устройство, широкополосное радиоприемное устройство, устройство определения параметров сигнала, устройство цифровой обработки сигнала, автоматизированное рабочее место оператора, аппаратуру передачи данных и средства радиосвязи, а также электрический привод антенны и блок датчиков азимута, синтезатор рабочих частот и многоканальное узкополосное радиоприемное устройство, каждый канал которого содержит последовательно включенные преобразователь частоты многоканальный, блок коммутаторов, частотный разветвитель и детектор логарифмический многоканальный, при этом устройство определения параметров сигнала содержит последовательно включенные преобразователь частоты многоканальный, блок коммутаторов, детектор логарифмический многоканальный и преобразователь Фурье с многоканальным приемником, подключенные к преобразователю частоты многоканальному через блок коммутаторов. Устройство цифровой обработки информации выполнено в составе устройства первичной обработки, устройства межканальной обработки, устройства анализа и управления и анализатора параметров с соответствующими связями.
Недостатками известной станции радиотехнической разведки являются: малая дальность обнаружения, низкая живучесть и низкая скрытность и мобильность станции.
Наземный комплекс радиотехнической разведки «АВТОБАЗА-М» включает, по меньшей мере, два колесных автомобильных шасси, оснащенных горизонтируемыми платформами, выполненными с возможностью размещения на одной из них станции обнаружения и пеленгования (СОП), а на другой - станции обработки информации (СОИ). СОП включает в своем составе разностно-дальномерный (РДМ) комплекс, содержащий антенно-приемный модуль (АПМ), модуль блока управления и синхронизации (БУС), автоматизированное рабочее место оператора (АРМ), выполненное с возможностью функционирования программного обеспечения, реализующего режимы работы станции, включая решение задачи определения координат источников радиоизлучения разностно-дальномерным методом, а также контроля функционирования, тренировки и имитации, навигационное оборудование и аппаратуру линий связи. СОИ выполнена с возможностью приема и обработки информации, по меньшей мере, от одной СОП и включает в своем составе антенно-приемный модуль панорамного обзора (АПМ-ПО), АРМ, выполненное с возможностью функционирования программного обеспечения, реализующего режимы работы станции и комплекса в целом, включая решение задач идентификации целей и их траекторного сопровождения, а также систем контроля функционирования, тренировки и имитации, навигационное оборудование и аппаратуру линий связи, при этом навигационное оборудование СОП связано с модулем БУС, а модуль АПМ и АРМ СОП связаны с модулем БУС через первый коммутатор, АПМ-ПО и модуль АРМ СОИ связаны через второй коммутатор.
Комплекс характеризуется тем, что модуль АПМ состоит из двух блоков и неподвижно закреплен на антенно-подъемном устройстве ножничного типа и выполнен с возможностью работы в диапазоне 0,2-18 ГГц и включает 16 рупорных антенн, 32 печатных плоских антенны, 2 вибраторные антенны, 9 штыревых антенн, связанных с соответствующими приемными устройствами, выполненными с возможностью соединения с первым коммутатором, а модуль АПМ-ПО выполнен с возможностью работы в диапазоне 2-18 ГГц и включает 16 логопериодических антенн и 16 рупорных антенн с диаграммой направленности каждой по азимуту 45°, связанных с соответствующими приемными устройствами, выполненными с возможностью соединения со вторым коммутатором.
Комплекс характеризуется тем, что СОП и СОИ содержат дополнительные АРМ, выполненные с возможностью соединения с соответствующими коммутаторами и приемными устройствами.
Комплекс характеризуется тем, что модуль БУС дополнительно выполнен с возможностью управления аппаратурой станции и синхронизации информации, поступающей от, по меньшей мере, двух СОП, размещенных на соответствующих колесных автомобильных шасси.
Комплекс характеризуется тем, что СОИ состоит, по меньшей мере, из 16 логопериодических антенн и 16 рупорных антенн с диаграммой направленности каждой по азимуту 45°, модуля цифровой обработки сигналов и блока преобразования частоты, размещенных в антенном блоке с радиопрозрачным куполом, неподвижно закрепленном на антенно-подъемном устройстве ножничного типа.
Технический результат изобретения заключается в повышении дальности обнаружения, живучести, скрытности, мобильности и точности распознавания источников радиоизлучения, в том числе с кратковременным излучением.
Наземный комплекс радиотехнической разведки включает в себя:
- станцию обработки информации (СОИ) - 1 комплект;
- станцию обнаружения и пеленгования (СОП) - 4 комплекта.
Оборудование СОП и СОИ размещается на универсальной мобильной горизонтируемой платформе (УМГП), установленной на автомобильном колесном шасси.
Конструктивно в СОП входят:
- комплекс РДМ;
- разностно-фазовое радиоприемное устройство диапазона 0,2-2 ГГЦ;
- шасси с универсальной мобильной горизонтируемой платформой.
Аппаратура комплекса РДМ размещается в аппаратном контейнере и обеспечивает выполнение следующих функций:
- прием СВЧ сигналов от модуля АПМ, селекцию и их преобразование;
- измерение параметров импульсных и непрерывных сигналов;
- синхронизацию и связь между четырьмя постами СОП;
- формирование синхронизирующих сигналов (опорных частот и стробов);
- выдачу команд управления на модуль АПМ;
- определение координат источников радиоизлучения (ИРИ);
- идентификацию и классификацию ИРИ;
- отображение данных об ИРИ на дисплее;
- передачу информации потребителю по согласованному интерфейсу.
В состав комплекса РДМ входят:
- антенно-приемный модуль (АПМ) диапазона 0,2-18 ГГц;
- модуль блока управления и синхронизации (БУС) с аппаратурой обработки, синхронизации и управления;
- оборудованное рабочее место в составе автоматизированного рабочего места (АРМ) начальника СОП (оператора) на базе компьютера ППВ-19 и выносное (резервное) автоматизированное рабочее место начальника СОП (оператора) на базе ППЭВМ «Гранат»;
- аппаратура линий связи;
- навигационное оборудование GPS и GLONASS;
- функциональное программное обеспечение, реализующее режимы работы станции, включая решение задачи определения координат ИРИ разностно-дальномерным методом, а также контроля функционирования, тренировки и имитации.
Внутри аппаратного контейнера СОП расположена аппаратура АРМ, аппаратура блока управления и синхронизации, навигационное оборудование GPS и GLONASS, аппаратура линий связи.
Снаружи, на шасси с универсальной мобильной горизонтируемой платформой расположено антенно-приемное устройство, неподвижно закрепленное на антенно-подъемном устройстве ножничного типа, три направленные антенны с усилителями для роутера, установленные на телескопической мачте.
Каждая из трех направленных антенн линии связи установлена на собственном антенно-поворотном устройстве (ротаторе) и может поворачивать антенны линии связи по азимуту и углу места независимо друг от друга
Антенно-приемный модуль (модуль АПМ) предназначен для обеспечения синхронного обзора пространства и частоты в диапазоне 0,2-18 ГГц с мгновенной полосой обзора 500 МГц, приема и преобразования сигналов источников радиоизлучений (ИРИ) на промежуточную частоту включает:
- 59 антенн (рупорные - 16, печатные плоские - 32, вибраторные - 2, штыревые - 9);
- приемные устройства, антенные коммутаторы, двухканальный широкополосный преобразователь с синтезатором частоты и обратным конвертором;
- устройства функционального контроля;
- устройства сопряжения.
Конструктивно модуль АПМ состоит из двух блоков по 4 грани и неподвижно закреплен на антенно-подъемном устройстве ножничного типа. Каждая грань содержит по 6 рупорных и печатных плоских антенн с диаграммой направленности по азимуту 45° (кроме диапазона 0,2-0,5 ГГц).
Разбиение модуля АПМ на два блока обусловлено удобством конструктивно-технологического исполнения.
Антенны диапазона 2-4 ГГц и 4-8 ГГц выполнены печатным способом. Диаграмма направленности антенн по уровню -3 дБ в азимутальной плоскости 45°, в угломестной не менее 30°.
Антенны диапазона 8-12 и 12-18 ГГц имеют рупорно-параболическую конструкцию с диаграммой направленности по уровню -3 дБ в азимутальной плоскости 45°, в угломестной не менее 30°.
Модуль блока управления и синхронизации (БУС) обеспечивает управление всей аппаратурой станции и синхронизацию информации, поступающей от сопряженных СОП, при определении местоположения ИРИ.
Конструктивно модуль БУС выполнен в виде шкафа с распашной дверью, закрываемой на встроенный замок. На боковой стенке модуля БУС установлен разъем для подключения кабелей аппаратуры комплекса РДМ. Крепление модуля БУС осуществляется через специальные силовые закладки в стенках аппаратного контейнера.
Оборудованное рабочее место включает: АРМ начальника (оператора), вращающееся кресло, стол.
В состав АРМ начальника (оператора) входят: высокопроизводительный процессор, видеомонитор, клавиатура и манипулятор.
Выносное (резервное) АРМ начальника СОП (оператора) организовано на базе ППЭВМ.
В состав аппаратуры линий связи входят:
- три комплекта роутеров с радиомодемом (радио Ethernet);
- три направленные антенны линий связи;
- три усилителя;
- радиостанция УКВ диапазона;
- аппаратура оптоволоконной связи и коммутатор локальной вычислительной сети (ЛВС) - Ethernet-коммутатор.
Роутеры обеспечивают обмен внутрикомплексной телекодовой информацией с сопряженными СОП комплекса и передачу сигналов синхронизации по радиоканалу.
Радиостанции обеспечивают оперативно-командную связь и связь на марше.
Аппаратура оптоволоконной связи и коммутатор локальной вычислительной сети (ЛВС) - Ethernet-коммутатор обеспечивают распределение данных при обмене внутрикомплексной телекодовой информацией с другими СОП комплекса по радиоканалу (основная линия связи) или волоконно-оптической линии связи (резервная) и организацию локальной вычислительной сети между АРМ начальника (оператора) станции и выносным (резервным) АРМ.
Навигационное оборудование GPS и GLONASS обеспечивает автоматическое определение координат станции на боевой позиции и входит в состав резервной системы синхронизации.
Алгоритм обработки информации СОП предусматривает следующий перечень программного обеспечения:
- комплекс программ обмена;
- комплекс функциональных программ;
- комплекс программ интерфейса оператора;
- комплекс сервисных программ;
- комплекс программ работы с картами (ГИС).
Аппаратура СОИ размещается на универсальной мобильной горизонтируемой платформе на колесном шасси.
В состав СОИ входят:
- антенно-приемный модуль панорамного обзора (АПМ-ПО) с мгновенной полосой 16 ГГц в диапазоне 2-18 ГГц;
- автомобильное шасси с универсальной мобильной горизонтируемой платформой;
- оборудованные рабочие места в составе автоматизированных рабочих мест (АРМ) командира комплекса (АРМ1) и начальника станции (АРМ2) на базе компьютеров ППВ-19 и технологическое АРМ оператора станции (АРМ3) на основе ППЭВМ «Гранат»;
- аппаратура линий связи;
- функциональное программное обеспечение, реализующее режимы работы станции и комплекса в целом, включая решение задач идентификации целей и их траекторного сопровождения, а также систем контроля функционирования, тренировки и имитации;
- аппаратура документирования – принтер.
Внутри аппаратного контейнера СОИ расположена аппаратура АРМ1-АРМ3 и аппаратура линий связи.
Снаружи, на доработанном автошасси с универсальной мобильной горизонтируемой платформой расположены антенно-приемное устройство панорамного обзора, неподвижно закрепленное на антенно-подъемном устройстве ножничного типа, две направленные антенны с усилителями для роутеров на телескопической мачте.
Каждая из двух направленных антенн линии связи установлена на собственном антенно-поворотном устройстве (ротаторе) и может поворачивать антенны линии связи по азимуту и углу места независимо друг от друга.
Антенно-приемный модуль панорамного обзора (АПМ-ПО) предназначен для обеспечения панорамного обзора пространства и частоты в диапазоне 2-18 ГГц с мгновенной полосой обзора 16 ГГц, приема и преобразования сигналов источников радиоизлучений (ИРИ) на промежуточную частоту, цифровой обработки сигналов и измерения их параметров (несущей частоты и ширины спектра).
Конструктивно модуль АПМ-ПО в составе 16 логопериодических антенн и 16 рупорных антенн с диаграммой направленности каждой по азимуту 45°, модуля цифровой обработки сигналов и блока преобразования частоты смонтированы в антенном блоке с радиопрозрачным куполом, неподвижно закрепленном на антенно-подъемном устройстве ножничного типа.
Оборудованные рабочие места включают: АРМ соответствующего должностного лица СОИ, вращающееся кресло, стол.
В состав АРМ1 командира комплекса и АРМ2 начальника станции входят: высокопроизводительный процессор, видеомонитор, клавиатура и манипулятор.
АРМ3 оператора станции организован на ППЭВМ.
В состав аппаратуры линий связи входят:
- два комплекта (основной и резервный) с радиомодемом (радио Ethernet);
- две направленные антенны линий связи;
- два усилителя;
- четыре комплекта аппаратуры передачи данных;
- радиостанция УКВ диапазона;
- аппаратура оптоволоконной связи и коммутатор локальной вычислительной сети (ЛВС) - Ethernet-коммутатор.
Основной комплект роутера обеспечивает обмен информацией с вышестоящим командным пунктом.
Резервный комплект роутера обеспечивает обмен внутрикомплексной телекодовой информацией с одной из сопряженных СОП комплекса при выходе из строя ведущей СОП, раположенной на одной позиции с СОИ и связанной с ней по ВОЛС.
Радиостанции обеспечивают оперативно-командную связь между станциями комплекса и связь на марше.
Аппаратура передачи данных обеспечивает обмен информацией с вышестоящим командным пунктом (ВКП) и другими внешними источниками и потребителями (РЛС и КП ПВО).
Аппаратура оптоволоконной связи и коммутатор локальной вычислительной сети (ЛВС) - Ethernet-коммутатор обеспечивает:
- распределение данных при обмене информацией с вышестоящим командным пунктом по радиоканалу или волоконно-отической или проводной линиям связи;
- распределение данных при обмене информацией с другими внешними источниками и потребителями (РЛС и КП ПВО) по волоконно-отической или проводной линиям связи;
- распределение данных при обмене внутрикомплексной телекодовой информацией с сопряженным СОП комплекса по радиоканалу при выходе из строя волоконно-оптической линии связи с ведущей СОП;
- организацию локальной вычислительной сети между АРМ командира комплекса (АРМ1), начальника станции (АРМ2) и оператора (АРМ3).
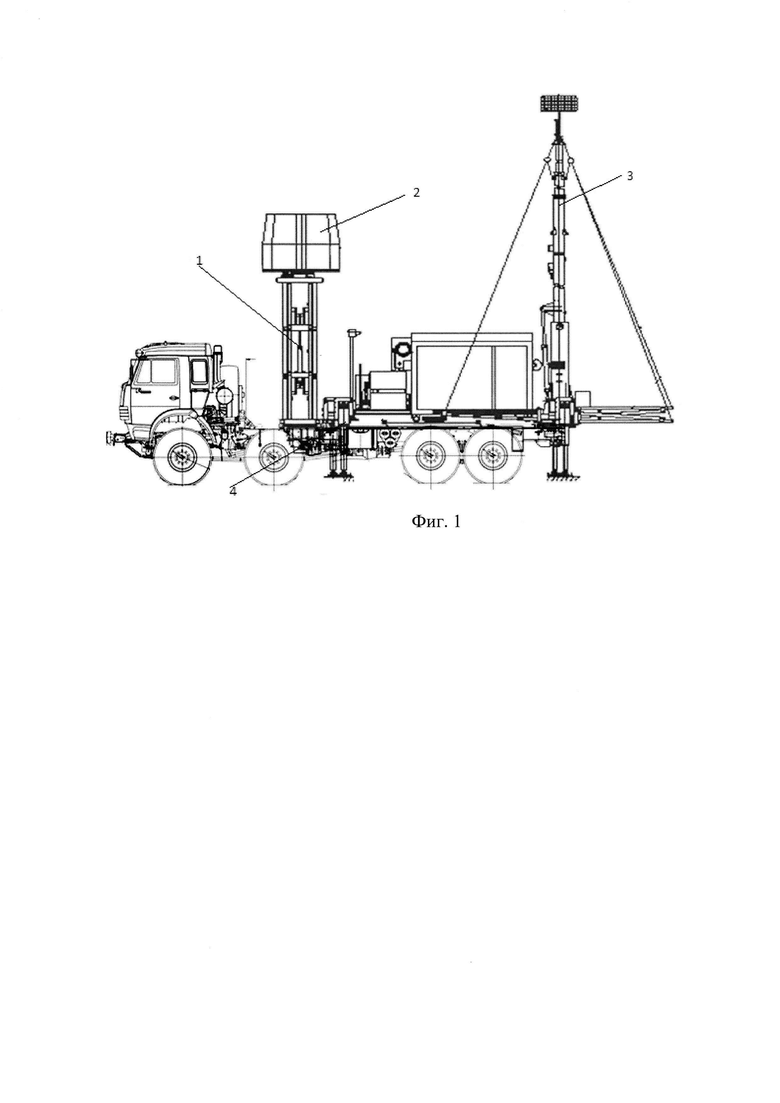
На фиг. 1 показан комплекс радиотехнической разведки в рабочем положении, где позицией 1 обозначено подъемное устройство ножничного типа с закрепленным на нем модулем АМП (позиция 2); позицией 3 обозначена телескопическая мачта с направленными антеннами; позицией 4 обозначено автомобильное шасси с универсальной мобильной горизонтируемой платформой.
Описание работы комплекса
В комплексе предусмотрены два вида управления:
- централизованное управление (ЦУ);
- автономное управление (АУ).
Вне зависимости от режима управления комплекс функционирует в следующем порядке.
Определение координат объектов по излучению радиоэлектронных средств (РЭС), размещаемых на объектах, и последующее их траекторное сопровождение (пассивная радиолокация) обеспечивается путем приема и обработки радиоизлучения РЭС с разных пространственных точек и последующего решения задачи определения координат источников радиоизлучения (ИРИ) разностно-дальномерным методом.
В процессе работы комплекса приемное устройство панорамного обзора СОИ осуществляет обнаружение сигналов бортовых РЭС в простанственной зоне вкруговую по азимуту и 30° по углу места в полосе частот мгновенного обзора 16 ГГц в диапазоне от 2 до 18 ГГц и измерение их параметров (несущей частоты, ширины спектра).
На основании полученной информации формируются команды целеуказания (несущая частота, сектор и ширина спектра), которые передаются на ведущую СОП комплекса.
На ведущей СОП вырабатывается команда, по которой приемники РДМ всех СОП за время не более 1 мс устанавливаются в заданном секторе и на заданной частоте.
В соответствии с принятой командой каждая СОП осуществляет обнаружение сигналов бортовых РЭС, измерение их параметров (времени побнаружения, частоты, длительности импульсов, ширины спектра, вида модуляции), передачу кодограмм обработанных сигналов от ведомых СОП на ведущую СОП. На ведущей СОП осуществляется: объединение сигнальной информации всех СОП с межпостовым поимпульсным координатным отождествлением по принадлежности к одному и тому же ИРИ, определение периода повторения импульсов и вычисление координат ИРИ, траекторную фильтрацию отметок.
Информация о параметрах ИРИ за время приема импульсов подвергается статистической обработке в реальном масштабе времени, что позволяет получить заданные точностные характеристики.
На ведущей СОП по измеренным параметрам сигналов определяются координаты источников излучений.
Полученная информация передается на СОИ для идентификации целей по параметрам распознавания классов или типов РЭС и завязки трасс.
Возможность определения координат ИРИ позволяет реализовать режим сопровождения источников излучения не только с формированием трассовой информации, но и вектора движения объекта. Наличие трассы движения объекта создает возможность формирования экстраполированного значения положения объекта, которое может быть использовано в том случае, если на очередном цикле обзора не поступала информация от трех СОП.
При получении целеуказания станция обнаружения и пеленгования (СОП) обеспечивает коммутацию приемных устройств к антенной системе в заданном секторе и перестройку на требуемую частоту.
Функционирование СОП в составе комплекса, обмен информацией и командами управления в режиме реального времени обеспечивается синхронизацией шкал времени пространственно разнесенных СОП.
Введение дополнительно в СОП режима моноимпульсного пеленгования существенно улучшает СКО пеленгования с 45° до 5°, что и позволяет использовать СОП в качестве станции РТР.
Три комплекта линий связи обеспечивают связь между ведущей и ведомыми СОП на дальности до 30 км. По линиям связи передаются команды управления и пакеты данных.
Станция обработки информации обеспечивает выполнение следующих основных функций:
- панорамный обзор с мгновенной полосой обзора 16 ГГц в диапазоне 2-18 ГГц;
- управление СОП комплекса;
- обмен информацией с вышестоящим командным пунктом и другими внешними источниками и потребителями информации;
- обнаружение сигналов бортовых РЭС в простанственной зоне вкруговую по азимуту и 30° по углу места и измерение их параметров (несущей частоты, ширины спектра);
- целеуказание (частота и сектор) ведущей СОП комплекса;
- идентификация целей по сигнальным параметрам ИРИ, полученным от ведущей СОП комплекса;
- траекторное сопровождение целей по координатной информации об ИРИ, полученной от ведущей СОП комплекса;
- документирование информации.
Антенно-приемный модуль панорамного обзора (АПМ-ПО) функционально включает:
- антенную систему;
- цифровое широкополосное радиоприемное устройство панорамного обзора (ЦШ-РПУ);
- источники вторичного электропитания (ВЭП).
Антенная система АПМ-ПО включает:
- 16 рупорных и 16 логопериодических антенн;
- малошумящие антенные усилители (МШУ);
- электронное переключающее устройство;
- интерфейсы связи.
Каждая антенна (рупорная или логопериодическая) имеет диаграмму направленности 45° в азимутальной и 30° в угломестной плоскостях с пересечением парциальных диаграмм направленности антенн (ДНА) на уровне 3 дБ.
На выходе каждой логопериодической антенны установлены широкополосные малошумящие усилители (МШУ) с коэффициентом шума не более 4 дБ.
Выходы каждого МШУ через сумматоры и ячейки управления подключаются к широкополосному радиоприемному устройству, состоящему из 32 приемных каналов с полосой по 500 МГц и обеспечивающему одновременный прием сигналов в полосе рабочих частот 2-18 ГГц в течение установленного времени (5 или 10 мс) с азимутального сектора 45°. Обнаружение ИРИ и измерение характеристик сигнала осуществляется устройством обработки сигналов. В следующий момент времени все приемные устройства подключаются к антеннам (МШУ) следующего азимутального сектора. Таким образом, за 40 мс (5 мс×8) или 80 мс (10 мс×8) осуществляется круговой обзор пространства.
После подачи питания на антенно-приемный модуль панорамного обзора производится встроенный контроль работоспособности устройства и при положительном результате осуществляется пространственный обзор зоны разведки, обнаружение сигналов бортовых РЭС, измерение их параметров (несущей частоты и ширины спектра).
Пространственно-частотный обзор приемным устройством панорамного обзора осуществляется следующим образом.
По командам от центрального процессора (ЦП) СОИ к цифровому широкополосному приемному устройству через ПРК 6×1 подключается выход одной из шести логопериодических антенн, обслуживающей сектор 60° по азимуту.
ЦШ-РПУ осуществляет панорамный обзор с мгновенной полосой 16 ГГц всего частотного диапазона 2-18 ГГц данного пространственного сектора.
Результаты просмотра данного пространственного сектора в виде измеренных характеристик обнаруженных ИРИ (частоты и ширины спектра) или отсутствие ИРИ в данном пространственном секторе передаются в центральный процессор СОИ. По результатам просмотра ЦП осуществляется переключение ЦШ-РПУ к выходу следующей логопериодической антенны, обслуживающей другой пространственный сектор 60°. Таким образом, производится последовательный обзор пространства вкруговую и выдача целеуказания по обнаруженным ИРИ в систему РДМ.
В процессе работы пассивной РЛС СОИ осуществляет:
- формирование и передачу на СОП команд управления и получение донесений об их выполнении;
- прием от ведущей СОП информации о состоянии станций, сигнальных характеристиках ИРИ и их координатах;
- распознование целей по сигнальным характеристикам ИРИ и их траекторное сопровождение;
- передачу на ВКП информации о координатах и параметрах движения целей, типах и (или) классах бортовых РЭС;
- прием от ВКП команд управления комплексом и передачу донесений об их выполнении;
- передачу на РЛС и КП системы ПВО Заказчика информации о координатах и параметрах движения целей, типе и (или) классе их бортовых РЛС;
- отображение информации о воздушной и радиотехнической обстановке на АРМ1 и АРМ2;
- документирование информации, циркулирующей в каналах передачи данных и результатов работы СОИ.
Сопряжение между СОИ и ведущей СОП осуществляется по волоконно-оптической линии связи. При выходе из строя ведущей СОП или ВОЛС с ней функционирование комплекса обеспечивается за счет назначения в качестве ведущей любой из оставшихся СОП и управления ею по радиоканалу через роутер.
Сопряжение СОИ с ВКП осуществляется по радиоканалу через роутер (основная линия связи), ВОЛС или проводную линию связи.
Сопряжение СОИ с РЛС, а также с КП системы ПВО Заказчика осуществляется по ВОЛС или проводной линии связи.
Алгоритм обработки информации СОИ предусматривает следующий перечень программного обеспечения:
- комплекс программ обмена;
- комплекс функциональных программ;
- комплекс программ интерфейса оператора;
- комплекс сервисных программ;
- комплекс программ работы с картами (ГИС).
Комплекс программ обмена включает:
- программу обмена с СОП;
- программу обмена с ВКП и передачи данных на РЛС и КП системы ПВО Заказчика.
Программа обмена с СОП обеспечивает передачу команд целеуказания и управления СОП, прием координатной и сигнальной информации об ИРИ.
СОИ функционирует в следующих режимах работы: «Ввод данных»; «Работа»; «Контроль»; «Тренаж»; «Воспроизведение»; «Документирование».
В режиме «Ввод данных» производится запись в память АРМ исходных следующих основных групп данных:
- используемых при автоматизированной обработке информации о целях в режиме «Работа»;
- радиоданных (РД), содержащих установки для роутера, радиостанций и радиоканала.
При обмене данными СОИ с СОП и ВКП по волоконно-оптическим линиям связи (ВОЛС) вводятся параметры обмена по ВОЛС.
В случае сопряжения СОИ по проводным линиям связи с ВКП, РЛС и КП ПВО через АПД, в каждый комплект АПД с АРМ вводятся исходные данные, определяющие режимы и параметры работы АПД по каждому направлению.
В режиме «Работа» реализуются основные функции СОИ по управлению аппаратурой станции, СОП и комплексом в целом, идентификации целей и их сопровождению, сопряжению с ВКП и другими абонентами с использованием средств связи и АПД, а также системы обработки информации.
В режиме «Контроль» реализуются основные функции по контролю исправности аппаратуры и определению неисправного элемента станции до типового элемента замены.
По мнению авторов изобретение обладает новизной и изобретательским уровнем. Опытный образец комплекса прошел испытания.
| название | год | авторы | номер документа |
|---|---|---|---|
| Станция радиотехнической разведки | 2016 |
|
RU2609527C1 |
| Мобильная аппаратная контроля безопасности связи | 2023 |
|
RU2823040C1 |
| Радиолокационная станция кругового обзора "Резонанс" | 2015 |
|
RU2624736C2 |
| АВТОМАТИЗИРОВАННЫЙ РАДИОУЗЕЛ КОРОТКОВОЛНОВОЙ СВЯЗИ | 2010 |
|
RU2428792C1 |
| СИСТЕМА ДИСТАНЦИОННОГО НАБЛЮДЕНИЯ И УПРАВЛЕНИЯ БЕСПИЛОТНЫМ ЛЕТАТЕЛЬНЫМ АППАРАТОМ | 2022 |
|
RU2793713C1 |
| ШИРОКОПОЛОСНАЯ СТАНЦИЯ РАДИОТЕХНИЧЕСКОЙ РАЗВЕДКИ С ВЫСОКОЙ ЧУВСТВИТЕЛЬНОСТЬЮ | 2008 |
|
RU2390946C2 |
| Контрольно-измерительная система радиомониторинга | 2022 |
|
RU2790349C1 |
| КОРАБЕЛЬНАЯ СТАНЦИЯ РАДИОТЕХНИЧЕСКОЙ РАЗВЕДКИ | 2020 |
|
RU2771138C1 |
| Станция активных помех | 2017 |
|
RU2660469C1 |
| ИНТЕГРИРОВАННЫЙ КОМПЛЕКС СВЯЗИ НАДВОДНОГО КОРАБЛЯ | 2013 |
|
RU2548023C2 |
Изобретение относится к области радиотехнической разведки. Достигаемый технический результат - повышение дальности обнаружения, живучести, скрытности, мобильности и точности распознавания источников радиоизлучения, в том числе с кратковременным излучением. Указанный результат достигается за счет того, что наземный комплекс радиотехнической разведки включает, по меньшей мере, два колесных автомобильных шасси, оснащенных горизонтируемыми платформами, выполненными с возможностью размещения на одной из них станции обнаружения и пеленгования (СОП), а на другой - станции обработки информации (СОИ). СОП включает в своем составе разностно-дальномерный (РДМ) комплекс, содержащий антенно-приемный модуль (АПМ), модуль блока управления и синхронизации (БУС), автоматизированное рабочее место оператора (АРМ), выполненное с возможностью функционирования программного обеспечения, реализующего режимы работы станции, включая решение задачи определения координат источников радиоизлучения разностно-дальномерным методом, а также контроля функционирования, тренировки и имитации, навигационное оборудование и аппаратуру линий связи. СОИ выполнена с возможностью приема и обработки информации, по меньшей мере, от одной СОП и включает в своем составе антенно-приемный модуль панорамного обзора (АПМ-ПО), АРМ, выполненное с возможностью функционирования программного обеспечения, реализующего режимы работы станции и комплекса в целом, включая решение задач идентификации целей и их траекторного сопровождения, а также систем контроля функционирования, тренировки и имитации, навигационное оборудование и аппаратуру линий связи, при этом навигационное оборудование СОП связано с модулем БУС, а модуль АПМ и АРМ СОП связаны с модулем БУС через первый коммутатор, АПМ-ПО и модуль АРМ СОИ связаны через второй коммутатор. 3 з.п. ф-лы, 1 ил.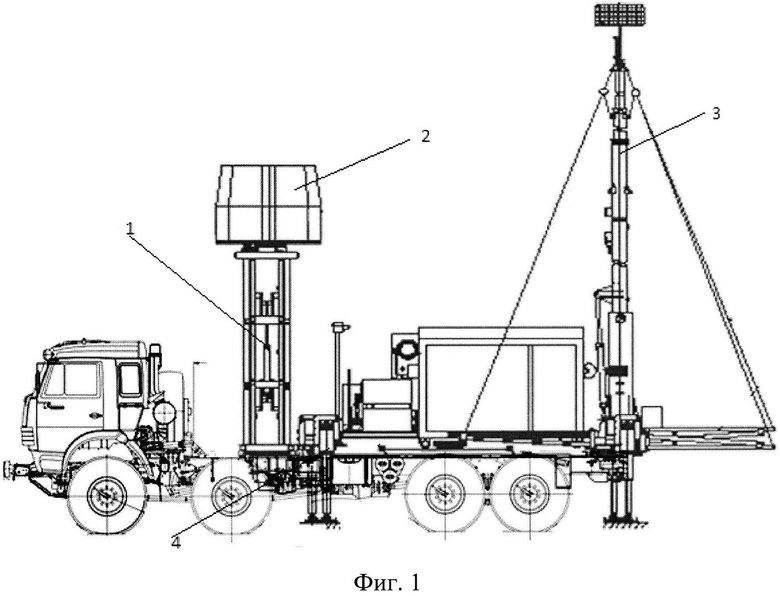
1. Наземный комплекс радиотехнической разведки, включающий, по меньшей мере, два колесных автомобильных шасси, оснащенных горизонтируемыми платформами, выполненными с возможностью размещения на одной из них станции обнаружения и пеленгования (СОП), а на другой - станции обработки информации (СОИ), причем СОП включает в своем составе разностно-дальномерный (РДМ) комплекс, содержащий антенно-приемный модуль (АПМ), модуль блока управления и синхронизации (БУС), автоматизированное рабочее место оператора (АРМ), выполненное с возможностью функционирования программного обеспечения, реализующего режимы работы станции, включая решение задачи определения координат источников радиоизлучения разностно-дальномерным методом, а также контроля функционирования, тренировки и имитации, навигационное оборудование и аппаратуру линий связи, а СОИ выполнена с возможностью приема и обработки информации, по меньшей мере, от одной СОП, и включает в своем составе антенно-приемный модуль панорамного обзора (АПМ-ПО), АРМ, выполненное с возможностью функционирования программного обеспечения, реализующего режимы работы станции и комплекса в целом, включая решение задач идентификации целей и их траекторного сопровождения, а также систем контроля функционирования, тренировки и имитации, навигационное оборудование и аппаратуру линий связи, при этом навигационное оборудование СОП связано с модулем БУС, а модуль АПМ и АРМ СОП связаны с модулем БУС через первый коммутатор, АПМ-ПО и модуль АРМ СОИ связаны через второй коммутатор.
2. Комплекс по п. 1, отличающийся тем, что модуль АПМ состоит из двух блоков и неподвижно закреплен на антенно-подъемном устройстве ножничного типа и выполнен с возможностью работы в диапазоне 0,2-18 ГГц и включает 16 рупорных антенн, 32 печатных плоских антенны, 2 вибраторные антенны, 9 штыревых антенн, связанных с соответствующими приемными устройствами, выполненными с возможностью соединения с первым коммутатором, а модуль АПМ-ПО выполнен с возможностью работы в диапазоне 2-18 ГГц и включает 16 логопериодических антенн и 16 рупорных антенн с диаграммой направленности каждой по азимуту 45°, связанных с соответствующими приемными устройствами, выполненными с возможностью соединения со вторым коммутатором.
3. Комплекс по п. 1, отличающийся тем, что модуль БУС дополнительно выполнен с возможностью управления аппаратурой станции и синхронизации информации, поступающей от, по меньшей мере, двух СОП, размещенных на соответствующих горизонтируемых платформах.
4. Комплекс по п. 1, отличающийся тем, что АПМ-ПО СОИ состоит, по меньшей мере, из 16 логопериодических антенн и 16 рупорных антенн с диаграммой направленности каждой по азимуту 45°, модуля цифровой обработки сигналов и блока преобразования частоты, размещенные в антенном блоке с радиопрозрачным куполом, неподвижно закрепленном на антенно-подъемном устройстве ножничного типа.
| ШИРОКОПОЛОСНАЯ СТАНЦИЯ РАДИОТЕХНИЧЕСКОЙ РАЗВЕДКИ С ВЫСОКОЙ ЧУВСТВИТЕЛЬНОСТЬЮ | 2008 |
|
RU2390946C2 |
| Устройство для поддержания в холодном состоянии напитков и пищевых продуктов, например, пива, сметаны и пр. | 1957 |
|
SU112564A1 |
| Установка для заполнения свободных от нефтепродуктов объемов наливных емкостей газами из дымохода парового котла | 1955 |
|
SU106393A1 |
| АВИАЦИОННЫЙ ГАЗОТУРБИННЫЙ ДВИГАТЕЛЬ | 2011 |
|
RU2458235C1 |
| JP 2015068688 A, 13.04.2015 | |||
| US 4646098 A, 24.02.1987. | |||

