Изобретение относится к системам управления объектами и может быть использовано в качестве системы дистанционного наблюдения и управления беспилотными летательными аппаратами в службах скорой помощи, министерства по чрезвычайным ситуациям, других министерств и ведомств.
В настоящее время в условиях все увеличивающегося объема передаваемой информации, сокращения временных показателей доставки информации в различные инстанции и в связи с возникающими различными ситуациями, для предупреждения аварийных ситуаций и при ликвидации последствий аварий на нефте- и газопроводах, возрастания (повышения) требований по достоверности и надежности ведения связи и осуществления мониторинга промышленных объектов и территории, существующие известные станции подобного типа уже не удовлетворяют современным требованиям и их использование для оперативной связи практически исключено, поскольку они не справляются с решением таких задач.
Известна система видеонаблюдения с транспортного средства, находящегося в движении, содержащая установленную на транспортном средстве видеокамеру, подключенную через плату видеоввода к компьютеру, к которому подключено приемо-передающее устройство транспортного средства, обеспечивающее связь по радиоканалу через приемо-передающее устройство с компьютером пункта контроля, GPS-приемник, имеющий возможность передачи по радиоканалу или сотовому каналу связи информации для отображения на карте своего места нахождения, а также известна система видеорегистрации обстановки на автомобильных дорогах, содержащая не менее чем одну видеокамеру и блок регистрации и управления [1].
Недостатком известных систем является их узкое предназначение и ограниченные возможности по осуществлению контроля за подвижными объектами.
Поэтому возникает задача создания системы, способной осуществлять непрерывный видеомониторинг на расширенной территории в различных географических и погодных условиях, производить обработку и хранение полученных данных видеомониторинга, а также выдавать автоматически или по запросу данные видеомониторинга в различные инстанции, в том числе на центральный и региональные офисы, где размещаются должностные лица по контролю за состоянием территории и промышленных объектов, по ликвидации аварий на нефте- и газопроводах, других объектах и устранению последствий чрезвычайных ситуаций.
В настоящее время широкое распространение получили системы управления беспилотным летательным аппаратом (БПЛА) по доставкам товаров и грузов, принципам наблюдения и охраны, а также взлета и посадки на определенную высоту относительно наземной станции.
Наиболее близкой по технической сущности к предлагаемому изобретению является выбранная в качестве прототипа система удаленного наблюдения и управления беспилотным летательным аппаратом, структура и технические возможности которой описаны в патенте RU №2657164 С1 от 08.06.2018 г., МПК G08G 5/00, G05D 1/00, В64С 39/00 [2]. Эта система включает в себя сеть станций организации и управления (СОУ), причем каждая СОУ содержит по меньшей мере одну камеру кругового обзора, по меньшей мере один радиочастотный приемопередатчик, устройство (систему) обработки и передачи информации; по меньшей мере один контрольный центр (КЦ). Контрольный центр (КЦ) включает в себя устройство (систему) обработки видеосигнала, монитор, автоматизированное рабочее место (АРМ) оператора и радиочастотный приемопередатчик.
Основными недостатками системы по прототипу являются ограниченные возможности по сбору, обработке и передаче данных о контролируемых объектах при нахождении беспилотного летательного аппарата в различных зонах на удаленной территории.
Целью изобретения является повышение пропускной способности каналов управления и надежности работы системы наблюдения и управления беспилотным летательным аппаратом при нахождении его в различных зонах на удаленной территории в режиме реального времени.
Поставленная цель достигается тем, что в систему дистанционного наблюдения и управления беспилотным летательным аппаратом, содержащую контрольный центр (КЦ), включающий в себя автоматизированное рабочее место (АРМ) оператора, оборудованное на базе портативного компьютера, монитор, устройство обработки видеосигнала и радиочастотный приемопередатчик с антенной, n станций организации и управления (СОУ), причем каждая СОУ включает в себя радиочастотный приемопередатчик с антенной, устройство обработки и передачи информации и камеру кругового обзора, дополнительно введены стационарная сеть связи общего пользования, состоящая из наземной станции спутниковой связи с антенной системой, автоматической телефонной станции (АТС) и каналов связи, оборудование беспилотного летательного аппарата (БПЛА), включающее в себя ультракоротковолновую (УКВ) радиостанцию с антенной, выполняющую функции ретранслятора связи, и видеорегистратор, в состав контрольного центра дополнительно введены таймер, многофункциональное устройство, выполняющее функции принтера и факсимильного аппарата, навигационная аппаратура со встроенной антенной, портативная радиостанция со встроенной антенной, автоматический коммутатор каналов, абонентская станция спутниковой связи (ССС) и антенная система абонентской станции спутниковой связи, а в состав каждой станции организации и управления дополнительно введены портативный компьютер и навигационный приемник со встроенной антенной, при этом первые, вторые, третьи, четвертые, пятые и шестые входы-выходы портативного компьютера АРМ оператора контрольного центра подключены соответственно ко входу-выходу монитора, к первому входу-выходу устройства обработки видеосигнала, ко входам-выходам таймера, многофункционального устройства, навигационной аппаратуры со встроенной антенной и по стыку Ethernet к первому входу-выходу автоматического коммутатора каналов, второй вход-выход которого соединен со вторым входом-выходом устройства обработки видеосигнала, третий вход-выход автоматического коммутатора каналов по стыку Ethernet соединен с канальным входом-выходом радиочастотного приемопередатчика, высокочастотный вход-выход которого соединен с высокочастотным входом-выходом антенны радиочастотного приемопередатчика, четвертый вход-выход автоматического коммутатора каналов по стыку Ethernet соединен с канальным входом-выходом абонентской станции спутниковой связи, высокочастотный вход-выход которой соединен с высокочастотным входом-выходом антенной системы абонентской станции спутниковой связи, которая по эфиру соединена с антенной системой наземной станции спутниковой связи стационарной сети связи общего пользования (ССОП), высокочастотный вход-выход которой соединен с высокочастотным входом-выходом наземной станции спутниковой связи, канальные входы-выходы которой соединены с первыми входами-выходами автоматической телефонной станции (АТС), ко вторым входам-выходам которой подключены каналы связи ССОП, вход-выход антенны радиочастотного приемопередатчика контрольного центра по эфиру соединен со встроенной антенной портативной радиостанции и с антенной УКВ радиостанции, размещенной на беспилотном летательном аппарате, высокочастотный вход-выход которой соединен с высокочастотным входом-выходом УКВ радиостанции, канальные входы-выходы которой соединены с информационными входами-выходами видеорегистратора; высокочастотный вход-выход антенны радиочастотного приемопередатчика каждой из n станций организации и управления БПЛА соединен с высокочастотным входом-выходом радиочастотного приемопередатчика, канальные входы-выходы которого соединены с первыми входами-выходами портативного компьютера, ко второму и третьему входам-выходам которого подключены соответственно информационные входы-выходы навигационного приемника со встроенной антенной и каналы связи стационарной сети связи общего пользования (ССОП), четвертые входы-выходы портативного компьютера каждой СОУ соединены с первыми входами-выходами устройства обработки и передачи информации, вторые входы-выходы которого соединены с входами-выходами камеры кругового обзора, высокочастотный вход-выход антенны УКВ радиостанции, размещенной на БПЛА, по эфиру соединен с антенной радиочастотного приемопередатчика первой из n станций организации и управления БПЛА, при этом антенны радиочастотных приемопередатчиков каждой из n станций организации и управления (СОУ) по эфиру соединены между собой и с антенной радиочастотного приемопередатчика контрольного центра.
Сопоставимый анализ с прототипом показывает, что предлагаемая система дистанционного наблюдения и управления беспилотным летательным аппаратом отличается наличием новых блоков: стационарной сети связи общего пользования (ССОП), включающей в себя наземную станцию спутниковой связи с антенной системой, автоматической телефонной станции (АТС) и каналов связи, оборудования беспилотного летательного аппарата (БПЛА), включающего в себя ультракоротковолновую (УКВ) радиостанцию с антенной, выполняющую функции ретранслятора связи, и видеорегистратор, таймера, многофункционального устройства, выполняющего функции принтера и факсимильного аппарата, навигационной аппаратуры со встроенной антенной, портативной радиостанции, автоматического коммутатора каналов, абонентской станции спутниковой связи с антенной системой в составе контрольного центра, портативного компьютера и навигационного приемника со встроенной антенной, входящих в состав каждой из n станций организации и управления, а также изменением связей между известными блоками системы дистанционного наблюдения и управления БПЛА.
Таким образом, заявляемая система дистанционного наблюдения и управления БПЛА соответствует критерию изобретения «новизна». Сравнение заявляемого решения с другими техническими решениями показывает, что введенные блоки широко известны и дополнительного творчества по их реализации не требуется. Однако при их введении в указанной связи с остальными элементами схемы в заявляемую систему дистанционного наблюдения и управления БПЛА вышеуказанные блоки проявляют новые свойства, что приводит к достижению поставленной цели.
Это позволяет сделать вывод о соответствии технического решения критерию «существенные отличия».
Заявляемое решение явным образом не следует из уровня техники и имеет изобретательский уровень
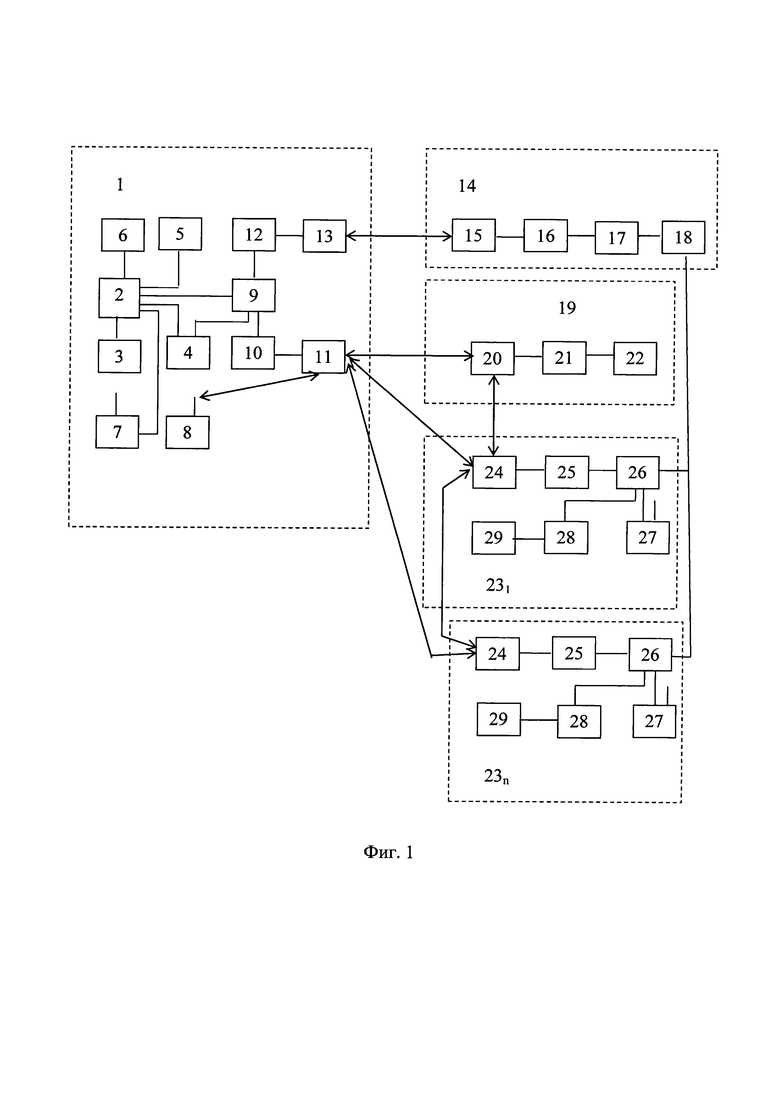
На фиг. 1 представлена структурная электрическая схема системы дистанционного наблюдения и управления БПЛА, а на фиг. 2 приведена структурная электрическая схема портативного компьютера автоматизированного рабочего места (АРМ) оператора.
Система дистанционного наблюдения и управления беспилотным летательным аппаратом (фиг. 1) содержит контрольный центр 1, состоящий из портативного компьютера 2 автоматизированного рабочего места (АРМ) оператора, монитора 3, устройства 4 обработки видеосигнала, таймера 5, многофункционального устройства 6, выполняющего функции принтера и факсимильного аппарата, навигационной аппаратуры 7 со встроенной антенной, портативной радиостанции 8 со встроенной антенной, автоматического коммутатора 9 каналов, радиочастотного приемопередатчика 10, антенны 11 радиочастотного приемопередатчика, абонентской станции 12 спутниковой связи и антенной системы 13 абонентской станции спутниковой связи (ССС), стационарную сеть 14 связи общего пользования (ССОП), включающую в себя антенную систему 15 наземной станции спутниковой связи (ССС), наземную станцию 16 спутниковой связи, автоматическую телефонную станцию (АТС) 17 и каналы связи 18 стационарной сети связи общего пользования (ССОП), оборудование беспилотного летательного аппарата (БПЛА) 19, включающего в себя антенну 20 ультракоротковолновой (УКВ) радиостанции, УКВ радиостанцию 21 и видеорегистратор 22, n станций 23 (231-23n) организации и управления (СОУ), каждая из которых включает в себя антенну 24 радиочастотного приемопередатчика, радиочастотный приемопередатчик 25, портативный компьютер 26, навигационный приемник 27 со встроенной антенной, устройство 28 обработки и передачи информации и камеру 29 кругового обзора.
Первые, вторые, третьи, четвертые, пятые и шестые входы-выходы портативного компьютера 2 АРМ оператора контрольного центра 1 подключены соответственно ко входу-выходу монитора 3, к первому входу-выходу устройства 4 обработки видеосигнала, ко входам-выходам таймера 5, многофункционального устройства 6, навигационной аппаратуры 7 со встроенной антенной и по стыку Ethernet к первому входу-выходу автоматического коммутатора 9 каналов, второй вход-выход которого соединен со вторым входом-выходом устройства 4 обработки видеосигнала, третий вход-выход автоматического коммутатора 9 каналов по стыку Ethernet соединен с канальным входом-выходом радиочастотного приемопередатчика 10, высокочастотный вход-выход которого соединен с высокочастотным входом-выходом антенны 11 радиочастотного приемопередатчика 10. Четвертый вход-выход автоматического коммутатора 9 каналов по стыку Ethernet соединен с канальным входом-выходом абонентской станции 12 спутниковой связи, высокочастотный вход-выход которой соединен с высокочастотным входом-выходом антенной системы 13 абонентской станции 12 спутниковой связи, которая по эфиру соединена с антенной системой 15 наземной станции 16 спутниковой связи стационарной сети 14 связи общего пользования (ССОП), высокочастотный вход-выход которой соединен с высокочастотным входом-выходом наземной станции 16 спутниковой связи, канальные входы-выходы которой соединены с первыми входами-выходами автоматической телефонной станции 17, ко вторым входам-выходам которой подключены каналы связи 18 стационарной сети 14 связи общего пользования (ССОП). Вход-выход антенны 11 радиочастотного приемопередатчика 10 контрольного центра 1 по эфиру соединен со встроенной антенной портативной радиостанции 8 и с антенной 20 УКВ радиостанции 21, размещенной на беспилотном летательном аппарате 19, высокочастотный вход-выход которой соединен с высокочастотным входом-выходом УКВ радиостанции 21, канальные входы-выходы которой соединены с информационными входами-выходами видеорегистратора 22. Высокочастотный вход-выход антенны 24 радиочастотного приемопередатчика 25 каждой из n станций 23 (231-23n) организации и управления БПЛА соединен с высокочастотным входом-выходом радиочастотного приемопередатчика 25, канальные входы-выходы которого соединены с первыми входами-выходами портативного компьютера 26 СОУ, ко второму и третьему входам-выходам которого подключены соответственно информационные входы-выходы навигационного приемника 27 со встроенной антенной и каналы связи 18 стационарной сети 14 связи общего пользования. Четвертые входы-выходы портативного компьютера 26 каждой СОУ 23 соединены с первыми входами-выходами устройства 28 обработки и передачи информации, вторые входы-выходы которого соединены с входами-выходами камеры 29 кругового обзора. Высокочастотный вход-выход антенны 20 УКВ радиостанции 21, размещенной на БПЛА, по эфиру соединен с антенной 24 радиочастотного приемопередатчика 25 первой (231) из n станций 23 организации и управления БПЛА, при этом антенны 24 радиочастотных приемопередатчиков 25 каждой из n станций 23 организации и управления (СОУ) по эфиру соединены между собой и с антенной 11 радиочастотного приемопередатчика 10 контрольного центра 1.
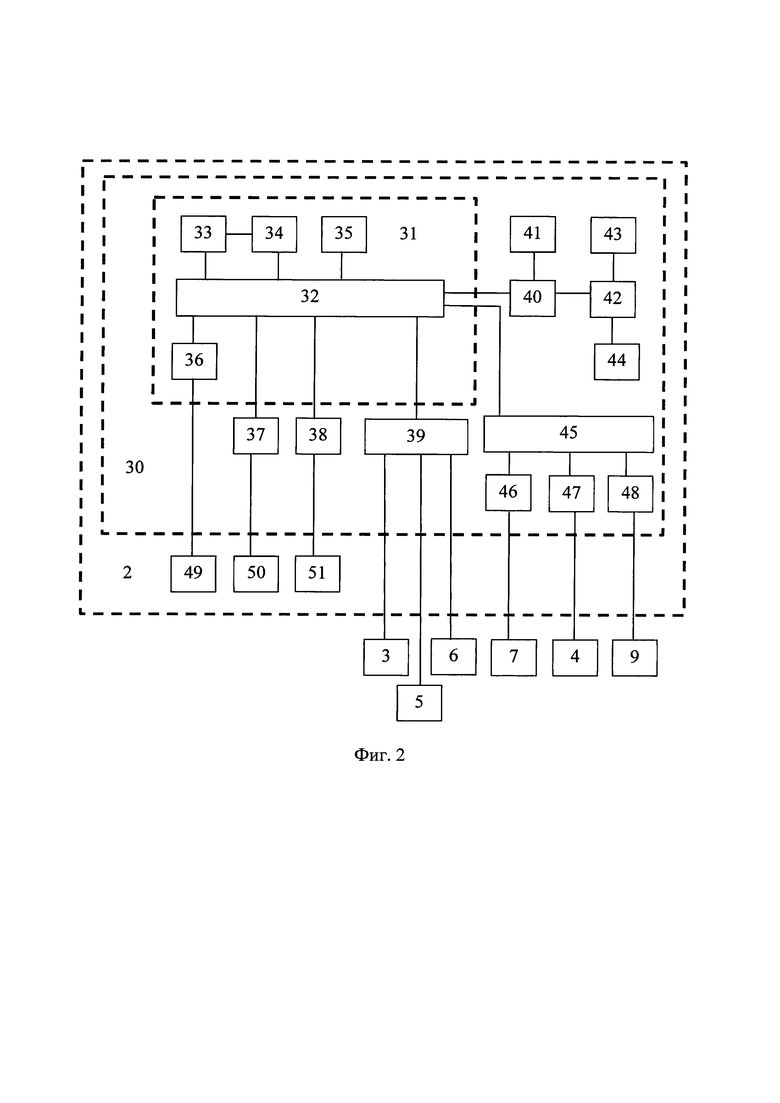
Портативный компьютер 2 АРМ оператора содержит (фиг. 2) системный блок 30, состоящий из материнской платы 31, на которой размещены системная магистраль (шина) 32, микропроцессор 33, оперативное запоминающее устройство 34, перепрограммируемое постоянное запоминающее устройство (ПЗУ) 35 и контроллер 36 клавиатуры, адаптера монитора 37, адаптера портов 38, контроллера 39 дополнительных устройств, контроллера 40 дисков, дисковода 41 для подключения гибкого магнитного диска, жесткого магнитного диска 42, системное программное обеспечение 43 и прикладное программное обеспечение 44, поставляемые на накопителе на жестком магнитном диске, расширителя 45 интерфейсов, платы аудио ввода-вывода 46, платы 47 видео ввода-вывода и платы 48 Ethernet, а также содержит стандартную клавиатуру 49, дисплей 50 с плазменным экраном и графический манипулятор 51 типа «мышь».
Первые входы-выходы микропроцессора 33, размещенного на материнской плате 31 системного блока 30 портативного компьютера 2 контрольного центра 1, соединены с первыми входами-выходами системной магистрали (шины) 32, вторые входы-выходы которой соединены с первыми входами-выходами оперативного запоминающего устройства (ОЗУ) 34, вторые входы-выходы которого соединены со вторыми входами-выходами микропроцессора 33. Третьи, четвертые, пятые, шестые, седьмые, восьмые и девятые входы-выходы системной магистрали 32 подключены соответственно ко входам-выходам перепрограммируемого постоянного запоминающего устройства (ПЗУ) 35, к первым входам-выходам контроллера клавиатуры 36, адаптера 37 монитора, адаптера 38 портов, контроллера 39 дополнительных устройств, контроллера 40 дисков и расширителя 45 интерфейсов. Вторые и третьи входы-выходы контроллера 40 дисков подключены к входам-выходам соответственно дисковода 41 для подключения гибкого магнитного диска и жесткого магнитного диска 42, вторые и третьи входы-выходы которого подключены ко входам-выходам соответственно системного программного обеспечения 43 и прикладного программного обеспечения 44. Вторые, третьи и четвертые входы-выходы расширителя интерфейсов 45 подключены к первым входам-выходам соответственно платы 46 аудио ввода-вывода, платы 47 видео ввода-вывода и платы 48 Ethernet, вторые входы-выходы контроллера 36 клавиатуры соединены с входами-выходами стандартной клавиатуры 49, вторые входы-выходы адаптера 37 монитора соединены с входами-выходами дисплея 50 с плазменным экраном, вторые входы-выходы адаптера 38 портов соединены с входами-выходами графического манипулятора 51 типа «мышь». При этом первыми, вторыми, третьими, четвертыми, пятыми и шестыми входами-выходами портативного компьютера являются соответственно вторые входы-выходы контроллера 39 дополнительных устройств, соединенные со входами-выходами монитора 3, вторые входы-выходы платы 47 видео ввода-вывода, соединенные со входами-выходами устройства 4 обработки видеосигнала, третьи и четвертые входы-выходы контроллера 39 дополнительных устройств, которые подключены к входам-выходам соответственно таймера 5 и многофункционального устройства 6, вторые входы-выходы платы 47 аудио ввода-вывода и платы 48 Ethernet, которые подключены к входам-выходам соответственно навигационной аппаратуры 7 со встроенной антенной и автоматического коммутатора 9 каналов.
Портативный компьютер 2 предназначен для формирования и передачи данных, обмена речевой информацией, документирования, обработки и хранения различной информации, включая видеоинформацию. При этом передача видеоинформации с помощью портативного компьютера 2 осуществляется путем подключения носителя с цифровой видеоинформацией к соответствующему порту, последующего преобразования компьютером указанной информации и передачи ее по каналу или линии связи.
В качестве портативного компьютера 2 АРМ оператора контрольного центра 1 может быть использована персональная электронная вычислительная машина (ПЭВМ) типа ЕС-1846. Эта ПЭВМ представляет собой многофункциональный терминал, дополненный аппаратными и программными средствами навигации, связи и передачи данных. Конструктивно ПЭВМ типа ЕС-1866 представляет собой переносной защищенный компьютер типа «Notebook», установленный на амортизационную раму с целью исключения его перемещения при нахождении подвижного объекта в движении.
Оператор АРМ с помощью портативного компьютера 2 контрольного центра 1 обеспечивает:
ввод, хранение, отображение и документирование информации;
накопление, хранение, регистрацию и обработку принятой информации;
визуальный контроль информационного обмена;
автоматическую диагностику аппаратуры с визуальным отображением ее технического состояния;
автоматическое управление аппаратурой;
обмен информацией с взаимодействующими БПЛА и СОУ по каналам связи сети обмена данными;
дистанционное управления аппаратурой из состава БПЛА и СОУ в объеме возможностей, предусмотренных в аппаратуре;
решение информационных и расчетных задач по организации направлений и каналов связи;
информационно-функциональное взаимодействие с навигационной аппаратурой, включая автоматический прием данных по определению координат своего местоположения и ввод их в портативный компьютер.
Монитор 3 предназначен для расширения возможностей получения наглядного отображения принимаемой информации на АРМ оператора контрольного центра 1.
В качестве монитора 3 может быть использован видеомонитор фирмы Polycom, который обеспечивает возможность работы с высочайшим качеством видео и звука, а также передачи данных в соответствии со стандартами высокой четкости (HD). а также может быть использован жидкокристаллический монитор типа TV BORK LT SSN1710SI. Указанный монитор обеспечивает отображение различной цветной и черно-белой видеоинформации.
Устройство 4 обработки видеосигнала предназначено для приема и обработки видеосигналов, поступающих от станций организации и управления БПЛА, и передачи их на портативный компьютер 2 АРМ оператора КЦ.
Устройство 4 обработки видеосигнала выполнено с возможностью:
добавления отметки о наличии БПЛА в зоне видимости по меньшей мере одной СОУ в видеосигнал, поступающей от хотя бы одной СОУ;
наносить отметку с координатами БПЛА на карту района, отображающуюся на мониторе контрольного центра (КЦ);
переключать на мониторе КЦ вывод видеосигнала, поступающего от одной СОУ, на вывод видеосигнала, поступающего от другой СОУ, при переходе БПЛА из зоны ответственности одной СОУ в зону ответственности другой СОУ.
Таймер 5 предназначен для фиксирования заданного интервала времени с момента запуска беспилотного летательного аппарата с секундомером отсчета.
Многофункциональное устройство 6 предназначено для распечатки передаваемой/принимаемой информации и данных в процессе обмена информацией между взаимодействующими объектами, а также обмен электронной корреспонденцией и факсимильными сообщениями. В качестве упомянутого устройства 6 может быть использовано многофункциональное устройство серии CANON типа MF4120 или совмещенное устройство факс/принтер Smart Base MPC600F, выполняющее роль принтера и факсимильного аппарата.
Многофункциональное устройство (МФУ) 6 представляет собой устройство, сочетающее в себе функции принтера, копировального аппарата, сканера и факсимильного аппарата листов формата А4. В качестве такого устройства может быть использовано МФУ типа KX-MB1530RU.
В качестве навигационной аппаратуры 7 со встроенной антенной может быть использована навигационная аппаратура типа «Азимут» или «Грот-В». Указанная аппаратура предназначена для измерения текущих навигационных параметров по сигналам космических навигационных систем ГЛОНАСС и GPS и определения на их основе координат местоположения объектов, размещенных на контролируемой территории, а также для синхронизации внутренней шкалы времени к шкалам системного времени ГЛОНАСС и GPS, шкалам координированного времени UTC (SU) и UTC. Конструктивно аппаратура состоит из электронного блока и антенного модуля. Электронный блок обеспечивает обработку сигналов навигационных параметров и выдачу навигационных данных потребителю.
Портативная радиостанция 8 со встроенной антенной предназначена для выхода оператора контрольного центра 1 на каналы связи организованной сети радиосвязи и ведения телефонной связи с операторами (абонентами) взаимодействующих объектов. В качестве такой станции может быть использована портативная радиостанция типа «Диггер-301» [4]. Эта радиостанция работает в ультракоротковолновом диапазоне частот, обеспечивает ведение переговоров между абонентами в дуплексном и симплексном режимах работы, передачу данных и сообщений, а также файловый обмен.
Автоматический коммутатор 9 каналов представляет собой полнодоступный коммутатор-маршрутизатор, обеспечивающий автоматический выбор направления связи и распределение трактов и каналов связи в процессе установления и ведения связи между взаимодействующими портативным компьютером 2 АРМ оператора КЦ, оборудованием БПЛА и станциями СОУ. Блок 9 представляет собой коммутатор с коммутационным полем N×N входа-выхода (каналов и линий связи). Конструктивно автоматический коммутатор 9 каналов выполнен в виде единого моноблока, включающего станционную и канальную стороны, к каждой из которых подключаются N линий с возможностью наращивания емкости кросса. Он предназначен для кросс-соединения каналов и линий между собой. При этом обеспечивается возможность соединения между собой любых N каналов как станционной стороны, так и канальной стороны, а также коммутации между собой каналов станционной стороны с каналами канальной стороны.
Радиочастотный приемопередатчик 10 совместно с антенной 11 контрольного центра 1 предназначен для организации канала управления беспилотным летательным аппаратом 19 и обеспечения взаимодействия со станциями 23 организации и управления в процессе наблюдения за БПЛА на контролируемой территории. При этом радиоканал управления беспилотным летательным аппаратом организуется как непосредственно, так и через радиочастотные приемопередатчики 25 с антеннами 24 станций 23 организации и управления.
В качестве радиочастотного приемопередатчика 10 может быть использована ультракоротковолновая (УКВ) радиостанция, работающая в диапазоне ультракоротковолновых волн, из состава цифрового комплекса средств радиосвязи «ДИГГЕР». Станции комплекса «ДИГГЕР» обеспечивают обмен речевой информацией и данными между оконечными устройствами, подключенными к аппаратуре комплекса (например, портативными компьютерами и системами навигации), индивидуальный, групповой и циркулярный вызовы абонентов сети, контроль (мониторинг) и управление радиосетью с изменением режимов работы по командам дистанционного управления.
Антенна 11 приемопередатчика по радиоинтерфейсу соединена с высокочастотной частью антенны УКВ радиостанции 21 БПЛА, канальные входы-выходы которой соединены со входами-выходами исполнительных устройств видеорегистратора 22.
Абонентская станция 12 спутниковой связи совместно с антенной системой 13 предназначена для организации радиолиний спутниковой связи при работе через стволы ретрансляторов космических аппаратов (КА) на геостационарной орбите в диапазоне 4/6 ГГц в любых условиях и при воздействии преднамеренных помех. Она обеспечивает работу с прямой ретрансляцией сигналов. При этом станция обеспечивает телефонную связь и передачу данных, включая данные межмашинного обмена, а также ведение видеоконференцсвязи с использованием цифровых каналов с различными скоростями и интерфейсом сопряжения Ethernet.
В станции 12 спутниковой связи обеспечивается прием радиосигналов навигационных космических систем ГЛОНАСС и GPS с целью определения полных координат местонахождения станции (долготы, широты, высоты), текущего времени и обеспечения коррекции опорной частоты станции относительно частоты навигационного сигнала.
В качестве такой станции может быть использована переносная станция спутниковой связи, схема и технические возможности которой приведены в патенте РФ №2660800 от 10.07.2018 г. Опубликовано в БИПМ №19.
В состав антенной системы 13 абонентской станции 12 спутниковой связи входит рефлектор с облучающей системой, антенно-волноводный тракт (АВТ), опорно-поворотное устройство с электросиловым приводом и аппаратура наведения. Она предназначена для приема из эфира и передачи в эфир высокочастотных сигналов, образованных приемопередатчиком абонентской станции 12 спутниковой связи. В качестве антенной системы 13 абонентской станции 12 может быть использована антенная система по патенту РФ на полезную модель №176016 от 26.12.2017 г., опубликована в Бюл. №36.
Наземная станция 16 спутниковой связи в составе приемника и передатчика, контроллера управления антенной, делителя промежуточной частоты, сумматора, анализатора спектра сигналов, спутникового модема и конвертера совместно с антенной системой 15 предназначена:
для обеспечения дуплексной телефонной связи и передачи данных, а так же для телефонной связи или межмашинного обмена в режиме удаленного абонента АТС при работе в сетях радиально-узловой связи по закрепленным каналам или каналам, работающим по принципам радио-АТС при непрерывной передаче информации;
для обеспечения дуплексной связи и передачи данных по каналам с пропускной способностью от 1,2 до 9,6 кбит/с, организуемым в четырех направлениях связи по закрепленным каналам или каналам, используемым в режиме радио-АТС при работе в непрерывном режиме.
Антенная система 15 наземной станции спутниковой связи является приемопередающей антенной, представляющей собой однозеркальную параболическую антенну, состоящую из зеркала с облучающей системой, опорно-поворотного устройства и аппаратуры наведения [4].
Автоматическая телефонная станция 17 предназначена для обеспечения выхода оператора АРМ контрольного центра через каналы связи 18 стационарной сети связи общего пользования (ССОП) на станции 23 организации и управления и получения дополнительной информации о месте нахождения и состояния БПЛА.
Каналы связи 18 предназначены для организации дополнительных направлений связи между контрольным центром 1 и станциями 23 организации и управления беспилотным летательным аппаратом 19 с целью повышения надежности управления БПЛА, особенно при значительном удалении БПЛА от контрольного центра 1.
Оборудование беспилотного летательного аппарата 19 в составе антенны 20, УКВ радиостанции 21 и видеорегистратора 22 предназначено для ведения мониторинга контролируемой территории, преобразования полученных данных видеонаблюдения с помощью видеорегистратора 22 и передачу сигналов через УКВ радиостанцию 21, выполняющую роль ретранслятора связи, на одну из станций 23 организации и управления БПЛА и на портативный компьютер 2 АРМ оператора контрольного центра 1.
УКВ радиостанция 21 содержит микро-ЭВМ, приемовозбудитель, блок приемопередатчика, блок управления, коммутации и сопряжения, пульт управления и внешний пульт управления. Она предназначена для выхода в сети радиосвязи и ведения автоматизированной, беспоисковой и бесподстроечной радиосвязи с аналогичными радиостанциями в УКВ диапазоне частот.
В качестве антенны 20 для УКВ радиостанции 21 может быть использована штыревая антенна Куликова (штырь 1,5 м), которая устанавливается на амортизаторе.
Видеорегистратор 22 предназначен для съемки объектов, находящихся на контролируемой местности, визуальной записи видеоинформации, преобразования полученных данных и последующей передачи информации по радиоканалу на станцию 23 организации и управления или непосредственно на АРМ оператора контрольного центра 1 с последующим отпечатыванием информации на мониторе 3. В состав видеорегистратора 22 входит блок исполнительных устройств и цифровая видеокамера.
Радиочастотные приемопередатчики 25 совместно с антеннами 24 каждой из станций 23 предназначены для организации радиоканалов управления БПЛА при его нахождении в зоне видимости одной из указанных станций 23 организации и управления (СОУ), а также обеспечения взаимодействия с оператором АРМ контрольного центра 1.
В качестве радиочастотных приемопередатчиков 25 каждой из станций 23 организации и управления могут быть также использованы ультракоротковолновые (УКВ) радиостанции, работающие в диапазоне ультракоротковолновых волн, из состава цифрового комплекса средств радиосвязи «ДИГГЕР» [3]. Станции комплекса «ДИГГЕР» обеспечивают обмен речевой информацией и данными между оконечными устройствами, подключенными к аппаратуре комплекса (например, портативными компьютерами и системами навигации), индивидуальный, групповой и циркулярный вызовы абонентов сети, контроль (мониторинг) и управление радиосетью с изменением режимов работы по командам дистанционного управления.
Портативный компьютер 26 каждой из n станций 23 организации и управления выполнен в виде планшета и предназначен для приема, обработки и передачи сигналов и команд управления БПЛА. Основу портативного компьютера 26 составляет высокоскоростной цифровой микропроцессор.
Навигационный приемник 27 со встроенной антенной предназначен для приема и регистрации данных с текущими координатами местоположения контролируемых объектов на местности с отображением их на экране монитора портативного компьютера и обеспечения привязки станций организации и управления БПЛА к единой системе навигации. В качестве такого блока может быть использован навигационный приемник GPSmap 267 с.
Навигационный приемник 27 со встроенной антенной станций организации и управления БПЛА обеспечивает в любой точке маршрута движения определение следующих основных параметров: плоских прямоугольных (или географических) координат местоположения, дирекционного (магнитного) азимута продольной оси изделия, углов наклона в продольной и поперечной плоскостях, скорости движения и пройденного пути, запоминание и хранение координат контрольных точек маршрута движения.
Навигационный приемник 27 в комплексе с портативным компьютером 26 каждой СОУ обеспечивает визуализацию электронной карты местности, отображение в реальном масштабе времени графической и цифровой информации маршрута и параметров движения, коррекцию измеряемых координат путем согласования траектории движения подвижного объекта с геометрией дорог, закодированной в цифровой базе данных карты, информационный обмен с внешними устройствами. Навигационный приемник 27 принимает данные от глобальной спутниковой системы GPS или ГЛОНАСС, которая предназначена для высокоточного определения трех координат места, составляющих вектора скорости и времени различных подвижных объектов.
Навигационный приемник 27 со встроенной антенной предназначен для определения координат местоположения и дирекционного (азимутального) угла продольной оси подвижного объекта - комплексной аппаратной связи и радиодоступа. Принцип действия приемника 27 основан на комплексной обработке информации, поступающей от автономной навигационной системы геомагнитного типа и приемника спутниковой навигационной системы ГЛОНАСС/GPS. Приемник 27 принимает данные от глобальной системы ГЛОНАСС/GPS, которая предназначена для высокоточного определения трех координат места, составляющих вектора скорости и времени различных подвижных объектов, передает полученные данные на портативный компьютер 26.
Устройство 28 обработки и передачи информации каждой СОУ предназначено для приема сигналов с камеры 29 кругового обзора, высокоскоростной обработки и передачи информации через портативный компьютер 26 на радиочастотный приемопередатчик 25 с антенной 24 и далее на портативный компьютер 2 АРМ оператора контрольного центра 1.
Камера 29 кругового обзора предназначена для съемки местности и визуальной записи видеоинформации с последующей передачей информации на устройство 28 обработки и передачи информации.
В качестве камеры 29 кругового обзора может быть использована видеокамера Sony HXR-NX или цифровая видеокамера Sony DCR-DVD106E. Видеокамера Sony DCR-DVD106E обеспечивает запись на DVD и предназначена также для осуществления видеосъемки событий вблизи подвижных и неподвижных объектов с возможностью дистанционного управления камерой оператором АРМ. Управление видеокамерой может осуществляться также с портативного компьютера 26 СОУ. В качестве камеры 29 кругового обзора может быть использована управляемая купольная видеокамера типа ISE-30/36ZWDN650FD.
Станции 23 организации и управления БПЛА размещены на местности по сотовому принципу таким образом, чтобы любая точка контролируемого пространства находилась в зоне видимости по меньшей мере одной камеры 29 кругового обзора СОУ.
Работа системы дистанционного наблюдения и управления БПЛА осуществляется следующим образом.
В общем виде система дистанционного наблюдения и управления беспилотным летательным аппаратом (БПЛА) представляет собой набор камер 29 кругового обзора, входящих в состав станций 23 организации и управления (СОУ) и расставленных на местности так, чтобы каждый БПЛА находился в зоне видимости хотя бы одной из камер 29. Такая система позволяет осуществлять наблюдение и управление полетами БПЛА в режиме реального времени, получая информацию о маршруте полета и состоянии БПЛА независимо от информации, полученной с БПЛА.
Особенностью предлагаемого технического решения является то, что система дистанционного наблюдения и управления БПЛА имеет возможность управлять одним или одновременно несколькими беспилотными летательными аппаратами в режиме реального времени.
Оператор АРМ находится в контрольном центре 1 и контролирует информацию, поступающую от каждой СОУ 23. При этом в контрольный центр 1 из каждой СОУ стекается информация, содержащая видеосигнал от камер 29 кругового обзора с отмеченным на нем одним или несколькими БПЛА, карта района с отмеченными на нем БПЛА. Связь оператора контрольного центра 1 и БПЛА осуществляется по тракту, включающему: портативный компьютер 2 АРМ оператора, устройство 4 обработки видеосигнала, автоматический коммутатор 9 каналов, радиочастотный приемопередатчик 10 с антенной 11 контрольного центра 1, далее по радиоинтерфейсу сигнал поступает в антенну 20 ультракоротковолновой радиостанции 21 и на видеорегистратор 22 беспилотного летательного аппарата 19. При этом на видеорегистраторе 22 записывается информация с картой местности, на которой находится БПЛА, и объектами, находящимися на контролируемой территории.
Сбор информации в КЦ от камер 29 кругового обзора станций 23 организации и управления осуществляется по тракту, включающему: камеры 29 кругового обзора каждой из станций 23, устройство 28 обработки и передачи информации, портативный компьютер 26, радиочастотный приемопередатчик 25 с антенной 24 и далее по радиоинтерфейсу сигнал поступает в антенну 11 радиочастотного приемопередатчика 10 контрольного центра 1 и через автоматический коммутатор 9 каналов сигнал передается в устройство 4 обработки видеосигнала, в котором аналоговый сигнал преобразуется в цифровую форму и передается в оперативную память портативного компьютера 2 АРМ оператора КЦ. При этом принятый сигнал отображается также на мониторе 3 для оперативного контроля.
Для повышения надежности работы системы дистанционного наблюдения и управления БПЛА и доставки информации от камер 29 кругового обзора используются радиоканалы станций спутниковой связи и каналы связи 18 стационарной сети связи 14 общего пользования. Доставка информации осуществляется по тракту, включающему: камеры 29 кругового обзора, устройство 28 обработки и передачи информации, портативный компьютер 26 станций 23 организации и управления, каналы связи 18, АТС 17, наземная станция 16 спутниковой связи с антенной системой 15 сети 14 связи общего пользования, радиоинтерфейс между антенной системой 15 наземной станции 16 спутниковой связи и антенной системой 13 абонентской станции 12 спутниковой связи, автоматический коммутатор 9 каналов, устройство 4 обработки видеосигнала и портативный компьютер 2 АРМ оператора контрольного центра 1.
Данные с видеорегистратора 22 БПЛА 19 передаются в портативный компьютер 26 станции 23, в зоне видимости которой (например, первой станции 231) находится БПЛА, по тракту, включающему видеорегистратор 22, УКВ радиостанцию 21 с антенной 20, выполняющую функции ретранслятора связи, радиоинтерфейс, антенну 24 радиочастотного приемопередатчика 25 СОУ 23 и портативный компьютер 26. Если БПЛА находится в зоне видимости другой станции 23 организации и управления (например, второй станции 23), тогда сигнал с видеорегистратора 22 БПЛА передается по радиоканалу, образованному УКВ радиостанцией 21 с антенной 20 и радиочастотными приемопередатчиками 25 с антеннами 24, на портативный компьютер второй станции 23 и далее сигнал по радиоканалу, образованному радиочастотным приемопередатчиком 25 с антенной 24 второй станции 23 и радиочастотным приемопередатчиком 10 с антенной 11 контрольного центра 1, передается через автоматический коммутатор 9 каналов на устройство 4 обработки видеосигнала, со входа-выхода которого преобразованный сигнал в цифровом виде поступает на портативный компьютер 2 АРМ оператора КЦ.
Таким образом, оператор контрольного центра в любой момент времени видит:
видео со всех станций 23, в зоне видимости которых находится хотя бы один БПЛА, с отметкой позиции БПЛА на видео;
карту зоны ответственности станции 23 организации и управления с отметками ведомых БПЛА;
данные о состоянии каждой станции 23 и каждого БПЛА, в зоне ответственности станции.
Таким образом, в любой момент времени БПЛА находится в зоне видимости оператора контрольного центра и он имеет возможность управлять БПЛА в режиме реального времени по образованным каналам двухсторонней связи.
Управление БПЛА также может осуществляться оператором контрольного центра в автоматическом режиме. Алгоритм управления БПЛА осуществляется следующим образом.
Беспилотный летательный аппарат находится в начальной точке пространства на земле или на базе. Оператор КЦ задает точку или несколько точек, в которые должен прилететь БПЛА. Заданная точка ил набор точек заносится в память портативного компьютера 2 КЦ. При этом автоматически прокладывается маршрут движения БПЛА и решается задача оптимизации маршрута с учетом информации, поступающей от станций 23 организации и управления.
После решения задачи оптимизации маршрута БПЛА, КЦ подает сигнал на взлет. При прокладывании маршрута БПЛА после решения задачи оптимизации КЦ может изменить маршрут при возникновении неполадок или внешних условий, делающих продолжение полета опасным или невозможным. Для этого КЦ через станции 23 подает сигнал на принудительную посадку БПЛА.
Контрольный центр (КЦ) 1 вырабатывает сигналы управления БПЛА при помощи программных инструкций, заложенных в хранилище портативного компьютера 2 АРМ оператора КЦ. При этом программные инструкции включают в себя инструкции для расчета маршрута каждого БПЛА в соответствии с данными о точке его назначения, наличии в зоне ответственности каждой СОУ 23 других БПЛА, анализа загрузки и качества работы каждой СОУ, причем по результатам указанного анализа программа создает рекомендации по изменению количества СОУ в сети, места расположения СОУ и аппаратуры, входящей в состав СОУ.
Технический результат от предлагаемого изобретения заключается в повышении пропускной способности каналов управления и надежности работы системы дистанционного наблюдения и управления беспилотным летательным аппаратом при нахождении его в различных зонах на удаленной территории и в различных погодных условиях, достигаемый за счет введения новых средств связи и управления, включающих абонентские и наземные станции спутниковой связи, возможности организации каналов управления БПЛА по нескольким независимым направлениям посредством каналов связи стационарной сети связи общего пользования (ССОП) и ретрансляции сигналов, поступающих от камер кругового обзора СОУ и видеорегистратора, размещенного на беспилотном летательном аппарате, с последующей передачей данных с БПЛА и со станций организации и управления на АРМ оператора и визуальным отображением полученных данных на мониторе контрольного центра в режиме реального времени.
Достоинством предлагаемой системы дистанционного наблюдения и управления БПЛА является также и то, что она может быть реализована с использованием промышленно изготавливаемых средств связи и управления, телекоммуникационного оборудования и программных средств автоматизированных систем управления.
Источники информации.
1. US, патент №8838289 С1, МПК G05D 1/00, 2008.
2. RU, патент №2657164 С1, МПК G08g 5/00, G05D 1/00, В64С 39/00, 2016 (прототип).
3. Отечественный цифровой комплекс средств радиосвязи «ДИГГЕР». ООО «РАДИОТЕХНИКА».
4. Спутниковая связь и вещание: Справочник. - 3-е изд., перераб. и доп./В.А. Бартенев, Г.В. Болотов, Быков и др.; Под ред. Л.Я. Кантора. - И.: Радио и связь, 1997.
| название | год | авторы | номер документа |
|---|---|---|---|
| МОБИЛЬНЫЙ КОМПЛЕКС СВЯЗИ И УПРАВЛЕНИЯ | 2020 |
|
RU2739067C1 |
| МОБИЛЬНАЯ СТАНЦИЯ ВИДЕОМОНИТОРИНГА И СВЯЗИ | 2008 |
|
RU2398353C2 |
| СИСТЕМА ВИДЕОМОНИТОРИНГА И СВЯЗИ | 2008 |
|
RU2387080C1 |
| ПОДВИЖНАЯ АППАРАТНАЯ УПРАВЛЕНИЯ И СВЯЗИ | 2015 |
|
RU2578805C1 |
| КОМПЛЕКС ОБЕСПЕЧЕНИЯ РАДИОСВЯЗИ С ИСПОЛЬЗОВАНИЕМ БЕСПИЛОТНОГО ЛЕТАТЕЛЬНОГО АППАРАТА (БПЛА) НА ТЕРРИТОРИИ С РАЗРУШЕННОЙ ИНФРАСТРУКТУРОЙ СВЯЗИ В ЗОНАХ СТИХИЙНОГО БЕДСТВИЯ И ЧРЕЗВЫЧАЙНЫХ СИТУАЦИЙ | 2013 |
|
RU2554517C2 |
| КОМПЛЕКС СРЕДСТВ ВИДЕОНАБЛЮДЕНИЯ И СВЯЗИ МОБИЛЬНОГО ПУНКТА УПРАВЛЕНИЯ | 2011 |
|
RU2468522C1 |
| КОМПЛЕКСНАЯ АППАРАТНАЯ СВЯЗИ И РАДИОДОСТУПА | 2023 |
|
RU2807320C1 |
| ПОДВИЖНАЯ АВТОМАТИЗИРОВАННАЯ МАШИНА СВЯЗИ И УПРАВЛЕНИЯ РОБОТЕХНИЧЕСКИМ КОМПЛЕКСОМ | 2021 |
|
RU2762624C1 |
| МНОГОФУНКЦИОНАЛЬНАЯ КОМАНДНО-ШТАБНАЯ МАШИНА | 2022 |
|
RU2788156C1 |
| НАЗЕМНЫЙ МОБИЛЬНЫЙ РЕТРАНСЛЯТОР СВЯЗИ | 2022 |
|
RU2792024C1 |
Система дистанционного наблюдения и управления беспилотным летательным аппаратом содержит контрольный центр, состоящий из портативного компьютера автоматизированного рабочего места (АРМ) оператора, монитора, устройства обработки видеосигнала, таймера, многофункционального устройства, навигационной аппаратуры со встроенной антенной, портативной радиостанции со встроенной антенной, автоматического коммутатора каналов, радиочастотного приемопередатчика с антенной, абонентской станции спутниковой связи и антенной системы абонентской станции спутниковой связи (ССС), а также содержит стационарную сеть связи общего пользования (ССОП), включающую в себя антенную систему наземной станции спутниковой связи (ССС), наземную станцию спутниковой связи, автоматическую телефонную станцию (АТС) и каналы связи стационарной сети связи общего пользования (ССОП), а также содержит оборудование беспилотного летательного аппарата (БПЛА), включающего в себя антенну ультракоротковолновой (УКВ) радиостанции, УКВ радиостанцию и видеорегистратор, n станций организации и управления (СОУ), каждая из которых включает в себя антенну радиочастотного приемопередатчика, радиочастотный приемопередатчик, портативный компьютер, навигационный приемник со встроенной антенной, устройство обработки и передачи информации и камеру кругового обзора. Обеспечивается повышение пропускной способности каналов управления и надежности работы системы наблюдения и управления беспилотным летательным аппаратом при нахождении его в различных зонах на удаленной территории в режиме реального времени. 1 з.п. ф-лы, 2 ил.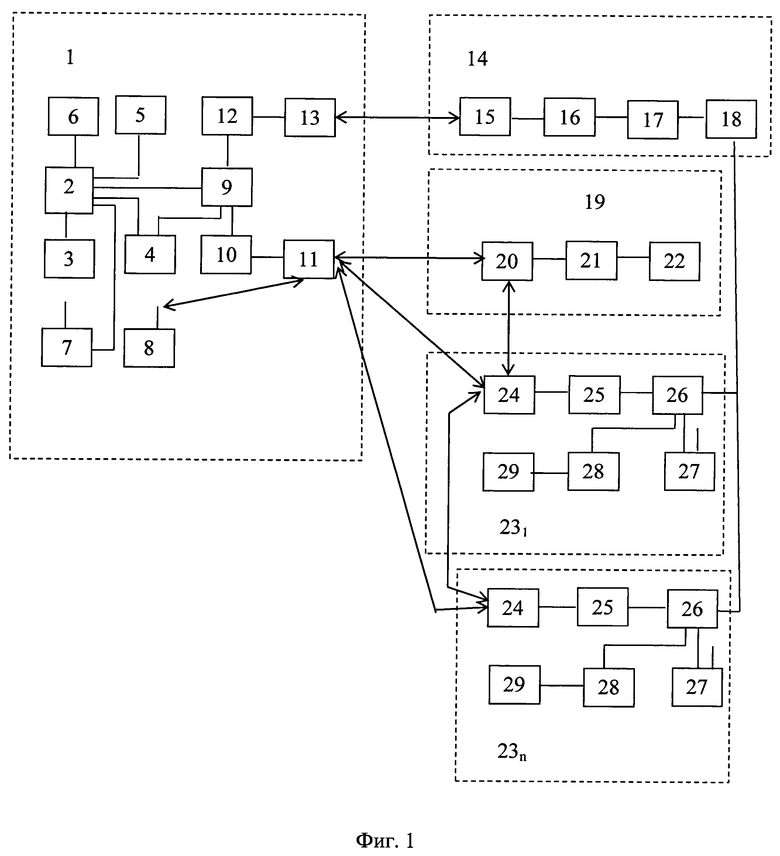
1. Система дистанционного наблюдения и управления беспилотным летательным аппаратом, содержащая контрольный центр (КЦ), включающий в себя автоматизированное рабочее место (АРМ) оператора, оборудованное на базе портативного компьютера, монитор, устройство обработки видеосигнала и радиочастотный приемопередатчик с антенной, n станций организации и управления (СОУ), причем каждая СОУ включает в себя радиочастотный приемопередатчик с антенной, устройство обработки и передачи информации и камеру кругового обзора, отличающаяся тем, что в нее дополнительно введены стационарная сеть связи общего пользования, состоящая из наземной станции спутниковой связи с антенной системой, автоматической телефонной станции (АТС) и каналов связи, оборудование беспилотного летательного аппарата (БПЛА), включающее в себя ультракоротковолновую (УКВ) радиостанцию с антенной, выполняющую функции ретранслятора связи, и видеорегистратор, в состав контрольного центра дополнительно введены таймер, многофункциональное устройство, выполняющее функции принтера и факсимильного аппарата, навигационная аппаратура со встроенной антенной, портативная радиостанция со встроенной антенной, автоматический коммутатор каналов, абонентская станция спутниковой связи (ССС) и антенная система абонентской станции спутниковой связи, а в состав каждой станции организации и управления дополнительно введены портативный компьютер и навигационный приемник со встроенной антенной, при этом первые, вторые, третьи, четвертые, пятые и шестые входы-выходы портативного компьютера АРМ оператора контрольного центра подключены соответственно ко входу-выходу монитора, к первому входу-выходу устройства обработки видеосигнала, ко входам-выходам таймера, многофункционального устройства, навигационной аппаратуры со встроенной антенной и по стыку Ethernet к первому входу-выходу автоматического коммутатора каналов, второй вход-выход которого соединен со вторым входом-выходом устройства обработки видеосигнала, третий вход-выход автоматического коммутатора каналов по стыку Ethernet соединен с канальным входом-выходом радиочастотного приемопередатчика, высокочастотный вход-выход которого соединен с высокочастотным входом-выходом антенны радиочастотного приемопередатчика, четвертый вход-выход автоматического коммутатора каналов по стыку Ethernet соединен с канальным входом-выходом абонентской станции спутниковой связи, высокочастотный вход-выход которой соединен с высокочастотным входом-выходом антенной системы абонентской станции спутниковой связи, которая по эфиру соединена с антенной системой наземной станции спутниковой связи стационарной сети связи общего пользования (ССОП), высокочастотный вход-выход которой соединен с высокочастотным входом-выходом наземной станции спутниковой связи, канальные входы-выходы которой соединены с первыми входами-выходами автоматической телефонной станции (АТС), ко вторым входам-выходам которой подключены каналы связи ССОП, вход-выход антенны радиочастотного приемопередатчика контрольного центра по эфиру соединен со встроенной антенной портативной радиостанции и с антенной УКВ радиостанции, размещенной на беспилотном летательном аппарате, высокочастотный вход-выход которой соединен с высокочастотным входом-выходом УКВ радиостанции, канальные входы-выходы которой соединены с информационными входами-выходами видеорегистратора; высокочастотный вход-выход антенны радиочастотного приемопередатчика каждой из n станций организации и управления БПЛА соединен с высокочастотным входом-выходом радиочастотного приемопередатчика, канальные входы-выходы которого соединены с первыми входами-выходами портативного компьютера, ко второму и третьему входам-выходам которого подключены соответственно информационные входы-выходы навигационного приемника со встроенной антенной и каналы связи стационарной сети связи общего пользования (ССОП), четвертые входы-выходы портативного компьютера каждой СОУ соединены с первыми входами-выходами устройства обработки и передачи информации, вторые входы-выходы которого соединены с входами-выходами камеры кругового обзора, высокочастотный вход-выход антенны УКВ радиостанции, размещенной на БПЛА, по эфиру соединен с антенной радиочастотного приемопередатчика первой из n станций организации и управления БПЛА, при этом антенны радиочастотных приемопередатчиков каждой из n станций организации и управления (СОУ) по эфиру соединены между собой и с антенной радиочастотного приемопередатчика контрольного центра.
2. Система по п. 1, отличающаяся тем, что портативный компьютер контрольного центра содержит системный блок, состоящий из материнской платы, на которой размещены системная магистраль (шина) типа ISA/PCI, микропроцессор, оперативное запоминающее устройство (ОЗУ), перепрограммируемое постоянное запоминающее устройство (ПЗУ) и контроллер клавиатуры, адаптера монитора, адаптера портов, контроллера дополнительных устройств, контроллера дисков, жесткого магнитного диска, дисковода для подключения гибкого магнитного диска, системное программное обеспечение и прикладное программное обеспечение, поставляемые на накопителе на жестком магнитном диске, расширитель интерфейсов, платы аудио ввода-вывода, платы видео ввода-вывода и платы Ethernet, а также содержит стандартную клавиатуру, дисплей с плазменным экраном и графический манипулятор типа «мышь», при этом первые входы-выходы микропроцессора соединены с первыми входами-выходами системной магистрали (шины), вторые входы-выходы которой соединены с первыми входами-выходами оперативного запоминающего устройства, вторые входы-выходы которого соединены со вторыми входами-выходами микропроцессора, третьи, четвертые, пятые, шестые, седьмые, восьмые и девятые входы-выходы системной магистрали подключены соответственно ко входам-выходам перепрограммируемого постоянного запоминающего устройства, к первым входам-выходам контроллера клавиатуры, адаптера монитора, адаптера портов, контроллера дополнительных устройств, контроллера дисков и расширителя интерфейсов, вторые и третьи входы-выходы контроллера дисков подключены к входам-выходам соответственно дисковода для подключения гибкого магнитного диска и жесткого магнитного диска, вторые и третьи входы-выходы которого подключены ко входам-выходам соответственно системного программного обеспечения и прикладного программного обеспечения, вторые, третьи и четвертые входы-выходы расширителя интерфейсов подключены к первым входам-выходам соответственно платы аудио ввода-вывода, платы видео ввода-вывода и платы Ethernet, вторые входы-выходы контроллера клавиатуры соединены с входами-выходами стандартной клавиатуры, вторые входы-выходы адаптера монитора соединены с входами-выходами дисплея с плазменным экраном, вторые входы-выходы адаптера портов соединены с входами-выходами графического манипулятора типа «мышь», при этом первыми входами-выходами портативного компьютера являются вторые входы-выходы контроллера дополнительных устройств, соединенные со входами-выходами монитора, вторыми входами-выходами портативного компьютера являются вторые входы-выходы платы видео ввода-вывода, соединенные со входами-выходами устройства обработки видеосигнала, третьими и четвертыми входами-выходами портативного компьютера являются соответственно третьи и четвертые входы-выходы контроллера дополнительных устройств, которые подключены к входам-выходам соответственно таймера и многофункционального устройства, вторые входы-выходы платы аудио ввода-вывода и платы Ethernet являются пятыми и шестыми входами-выходами портативного компьютера, которые подключены ко входам-выходам соответственно навигационной аппаратуры со встроенной антенной и автоматического коммутатора каналов.
| АВИАЦИОННАЯ СИСТЕМА ЗОНДИРОВАНИЯ ЗЕМНОЙ ПОВЕРХНОСТИ | 2007 |
|
RU2346852C1 |
| СИСТЕМА УДАЛЁННОГО НАБЛЮДЕНИЯ И УПРАВЛЕНИЯ БЕСПИЛОТНЫМИ ЛЕТАТЕЛЬНЫМИ АППАРАТАМИ | 2016 |
|
RU2657164C1 |
| СПОСОБ ПРИМЕНЕНИЯ БЕСПИЛОТНЫХ ЛЕТАТЕЛЬНЫХ АППАРАТОВ И УСТРОЙСТВО УПРАВЛЕНИЯ | 2011 |
|
RU2457531C1 |
| US 11145212 B2, 12.10.2021 | |||
| WO 2019204936 A1, 31.10.2019. | |||

