ОБЛАСТЬ ТЕХНИКИ, К КОТОРОЙ ОТНОСИТСЯ ИЗОБРЕТЕНИЕ
Настоящее изобретение относится к системе текущего контроля зарядки, в частности, к главной системе текущего контроля для зарядки суперконденсаторов.
УРОВЕНЬ ТЕХНИКИ
Суперконденсаторы представляют собой вторичные физические источники питания, которые имеют очень большую энергоемкость для аккумулирования электрической энергии, могут обеспечивать высокую импульсную мощность и имеют, помимо прочих, такие преимущества, как высокая надежность, благоприятные криогенные свойства, экологичность и отсутствие загрязнения. Они представляют собой новые системы аккумулирования энергии и эффективный подход к решению проблемы неудовлетворительных мощностей заряда в существующих батареях, и они широко применяются в различных отраслях промышленности, например для транспортных средств с новыми источниками энергии, для получения электричества, для подъемников, угольных шахт и изготовления машин и механизмов.
Связь посредством носителя в виде линии питания представляет собой подход к связи посредством электрических систем, при котором в качестве средства передачи несущих сигналов используются линии передачи электрического питания. Линии передачи электрического питания имеют надежные конструктивные опоры и представляют собой экономичные и надежные средства для передачи несущих сигналов вместе с током питания по линиям передачи электрического питания.
В настоящее время системы управления батареями имеют в основном конструкцию типа ведущий/ведомый, чтобы контролировать информацию о состоянии конденсатора отдельных батарей в системах электроснабжения на основе батарей. Ведущая система управления отвечает за сбор информации о состоянии отдельных батарей от множества модулей и затем анализирует информацию о состоянии. Однако процесс заряда последовательно соединенных суперконденсаторов проходит по "принципу бочки", и неисправность как правило возникает в результате точки пробоя в отдельном конденсаторе. Использование централизованного подхода для текущего контроля может привести к ухудшению эффективности и повышенной нагрузке на систему.
Таким образом, настоящее изобретение предлагает принцип текущего контроля на основе распределенного принятия решений и использует носитель в виде линии питания для передачи данных, в результате чего улучшена эффективность работы системы текущего контроля и обеспечена надежность зарядки, а также уменьшается нагрузка на сеть связи.
РАСКРЫТИЕ ИЗОБРЕТЕНИЯ
Задачей настоящего изобретения является обеспечение главной системы текущего контроля для зарядки суперконденсаторов, которая включает в себя связь посредством носителя в виде линии питания, технические средства управления на основе микрокомпьютеров и технические средства на основе регистрации напряжения и температуры и может быть применена для транспортных средств с новыми источниками энергии и изготовления машин и механизмов, так чтобы решить проблемы традиционного подхода к зарядке, такие как потери энергии и загрязнение окружающей среды.
Задача настоящего изобретения решается по следующей технической схеме.
Предложена система текущего контроля, содержащая линии питания, подсистемы текущего контроля отдельных суперконденсаторов и главную систему текущего контроля.
Главная система текущего контроля принимает данные, отправляемые от подсистем текущего контроля, и содержит блок подачи питания, ведущий однокристальный микрокомпьютер, модуль PL2102 связи на основе несущей, модуль человеко-машинного интерфейса, блок хранения, модуль RS-232 и зарядную схему; блок подачи питания подает электрическое питание на ведущий однокристальный микрокомпьютер, при этом ведущий однокристальный микрокомпьютер соединен с модулем PL2102 связи на основе несущей и использует носитель в виде линии питания для осуществления связи между подсистемами текущего контроля отдельных суперконденсаторов и главной системой текущего контроля через линии электропитания, которые служат в качестве соответствующего средства; ведущий однокристальный микрокомпьютер соединен с модулем человеко-машинного интерфейса для выдачи предупреждений и осуществления отображения; ведущий однокристальный микрокомпьютер соединен с блоком хранения и соединен с компьютером через последовательные порты в модуле RS-232; ведущий однокристальный микрокомпьютер соединен с зарядной схемой и управляет зарядной схемой для вывода соответствующего электрического тока согласно состоянию заряда; ведущий однокристальный микрокомпьютер в главной системе текущего контроля принимает данные, отправляемые из подсистем текущего контроля отдельных суперконденсаторов в состоянии передачи; когда главная система текущего контроля находится в состоянии приема, сигнал с расширенным спектром в линии электропитания постоянного тока передается посредством трансформатора связи через частотно-избирательную схему по частоте приема в модуль PL2102 связи на основе несущей для демодуляции и затем вводится в процессор цифровой обработки сигналов в однокристальном микрокомпьютере; если состояние заряда отдельного суперконденсатора является ненормальным, главная система текущего контроля выдает команду об ошибке, вырабатывает предупредительный сигнал, останавливает процесс заряда и отображает соответствующий порядковый номер отдельного суперконденсатора на человеко-машинном интерфейсе.
Подсистема текущего контроля отдельного суперконденсатора принимает информацию о данных, выполняет операции с данными и обработку для вычисления состояния заряда суперконденсатора, оценивает состояние отдельного суперконденсатора и выборочно передает эти данные в главную систему текущего контроля. Подсистема текущего контроля отдельного суперконденсатора содержит отдельный суперконденсатор, блок подачи питания, ведомый однокристальный микрокомпьютер, модуль связи на основе несущей, блоки для регистрации напряжения, тока и температуры и блок хранения; блок подачи питания отвечает за подачу питания, блоки для регистрации напряжения, тока и температуры соединены с ведомым однокристальным микрокомпьютером, при этом ведомый однокристальный микрокомпьютер регистрирует информацию о напряжении, токе и температуре, непрерывно передаваемую через каждые порты, и вычисляет состояние заряда суперконденсатора; ведомый однокристальный микрокомпьютер соединен с блоком хранения для хранения данных и отправки этих данных в ведущий однокристальный микрокомпьютер в главной системе текущего контроля; при этом передача данных между подсистемами текущего контроля отдельных суперконденсаторов и главной системой текущего контроля реализована посредством модуля PL2102 связи на основе несущей через линии электропитания.
Главная система текущего контроля заряжает батарею суперконденсаторов через линии электропитания и зарядную схему, и линии электропитания также служат в качестве средства связи; связь между главной системой текущего контроля и подсистемами текущего контроля отдельных суперконденсаторов реализована посредством модуля связи на основе несущей через линии электропитания; выполнена одна главная система текущего контроля, и выполнены одна или более подсистем текущего контроля отдельных суперконденсаторов; каждая подсистема текущего контроля отдельного суперконденсатора имеет уникальный адрес и имеет порядковый номер, определяемый ведомым однокристальным микрокомпьютером.
Достигаемые технические результаты: согласно технической схеме, описанной выше, подсистемы текущего контроля отдельных суперконденсаторов в системе текущего контроля для зарядки суперконденсаторов используют значения напряжения, тока и температуры, полученные в реальном времени, для вычисления значения состояния заряда (SOC) и скорости его изменения с помощью алгоритма калмановской фильтрации; когда состояния SOC заряда отдельного суперконденсатора находится в диапазоне заданного порогового значения, подсистема текущего контроля отдельных суперконденсаторов не отправляет конкретные данные в главную систему текущего контроля; когда состояния SOC заряда отдельного суперконденсатора находится вне диапазона заданного порогового значения, ведомый однокристальный микрокомпьютер отправляет эти данные согласно категории и уровню в ведущий однокристальный микрокомпьютер в главной системе текущего контроля; подсистемы используют основанный на приоритете принцип множественного доступа CSMA/CA с контролем несущей и предотвращением конфликтов, чтобы конкурировать за канал, и после получения права доступа модуль PL2102 связи на основе несущей обрабатывает цифровые сигналы, отправленные от однокристального микрокомпьютера MSP430, посредством дифференциальной фазовой манипуляции (DPSK) и затем выдает сигналы в схему формирователя; затем сигналы через трансформатор связывают с линиями питания постоянного тока.
Ведущий однокристальный микрокомпьютер в главной системе текущего контроля принимает данные, отправляемые из подсистем текущего контроля отдельных суперконденсаторов, в отправляемых данных; когда главная система текущего контроля находится в состоянии приема, сигнал с расширенным спектром в линиях питания постоянного тока передается посредством трансформатора связи через частотно-избирательную схему по частоте приема в модуль PL2102 связи на основе несущей для демодуляции и затем подается в процессор DSP цифровой обработки сигналов в однокристальном микрокомпьютере; если состояние заряда отдельного суперконденсатора является ненормальным, главная система текущего контроля выдает команду об ошибке, вырабатывает предупредительный сигнал, останавливает процесс заряда и отображает соответствующий порядковый номер отдельного суперконденсатора на человеко-машинном интерфейсе.
Преимущества: суперконденсаторы являются энергосберегающими, экологически чистыми, надежными и прочными и т.п. и обеспечивают эффективный подход для устранения недостатков существующих батарей. В процессе заряда батареи последовательно соединенных суперконденсаторов легко может возникнуть чрезмерный заряд вследствие небольшой разности между отдельными суперконденсаторами, что отрицательно влияет на срок службы суперконденсаторов; предлагаемая система текущего контроля может управлять состоянием заряда каждого отдельного суперконденсатора в батарее суперконденсаторов в реальном времени, благодаря чему не допускается чрезмерный заряд.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
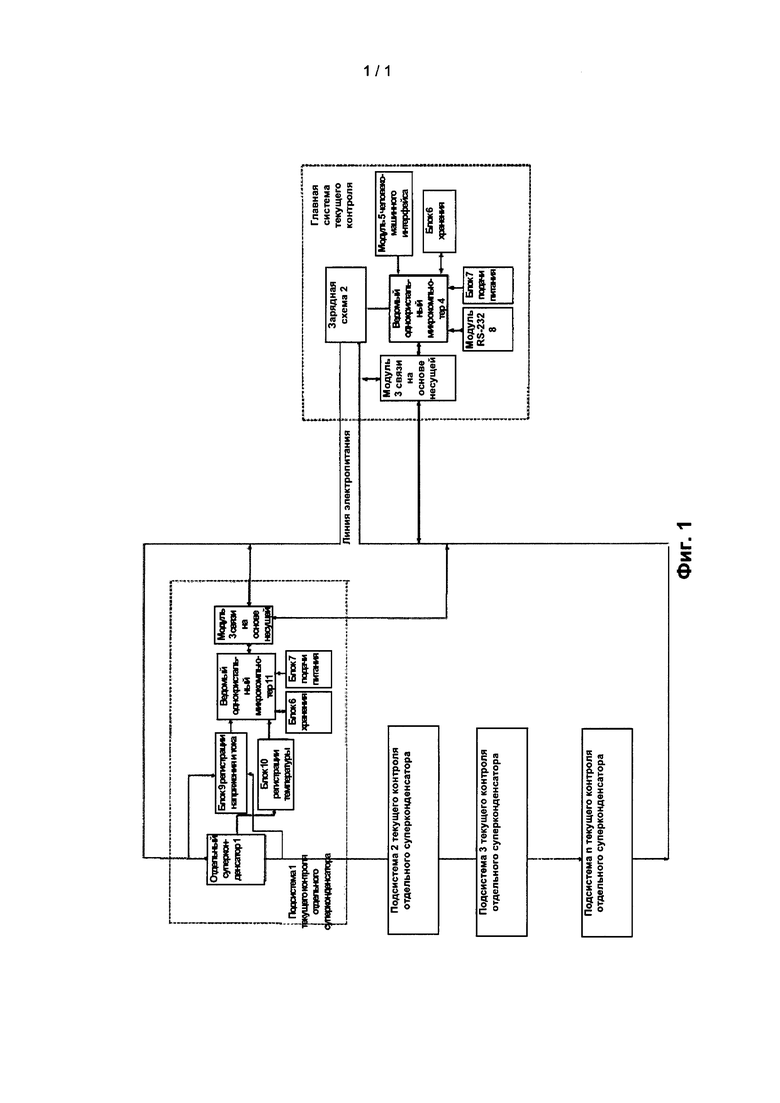
На Фиг. 1 показана структурная схема главной системы текущего контроля для зарядки суперконденсаторов. На чертеже:
1 - отдельный суперконденсатор;
2 - зарядная схема;
3 - модуль связи на основе несущей;
4 - ведущий однокристальный микрокомпьютер;
5 - модуль человеко-машинного интерфейса;
6 - блок хранения;
7 - блок подачи питания;
8 - модуль RS-232;
9 - блок регистрации напряжения и тока;
10 - блок регистрации температуры;
11 - ведомый однокристальный микрокомпьютер.
ПОДРОБНОЕ ОПИСАНИЕ ВАРИАНТОВ РЕАЛИЗАЦИИ
Вариант реализации 1
Предложена система текущего контроля для зарядки суперконденсаторов, содержащая линии питания, подсистемы текущего контроля отдельных суперконденсаторов и главную систему текущего контроля, при этом главная система текущего контроля содержит зарядную схему 2, модуль 3 связи на основе несущей, ведущий однокристальный микрокомпьютер 4, модуль 5 человеко-машинного интерфейса, блок 6 хранения, блок 7 подачи питания и модуль RS-232 8. Блок подачи питания подает электрическое питание на ведущий однокристальный микрокомпьютер, при этом ведущий однокристальный микрокомпьютер соединен с модулем PL2102 связи на основе несущей и использует носитель в виде линии питания для осуществления связи между подсистемами текущего контроля отдельных суперконденсаторов и главной системой текущего контроля через линии электропитания, которые служат в качестве соответствующего средства; ведущий однокристальный микрокомпьютер соединен с модулем человеко-машинного интерфейса для выдачи предупреждений и осуществления отображения; ведущий однокристальный микрокомпьютер соединен с блоком хранения и соединен с компьютером через последовательные порты в модуле RS-232; ведущий однокристальный микрокомпьютер соединен с зарядной схемой и управляет зарядной схемой для вывода соответствующего электрического тока согласно состоянию заряда; ведущий однокристальный микрокомпьютер в главной системе текущего контроля принимает данные, отправляемые из подсистем текущего контроля отдельных суперконденсаторов в состоянии передачи; когда главная система текущего контроля находится в состоянии приема, сигнал с расширенным спектром в линии питания постоянного тока передается посредством трансформатора связи через частотно-избирательную схему по частоте приема в модуль PL2102 связи на основе несущей для демодуляции и затем вводится в процессор цифровой обработки сигналов в однокристальном микрокомпьютере; если состояние заряда отдельного суперконденсатора является ненормальным, главная система текущего контроля выдает команду об ошибке, вырабатывает предупредительный сигнал, останавливает процесс заряда и отображает соответствующий порядковый номер отдельного суперконденсатора на человеко-машинном интерфейсе. Блок 6 хранения представляет собой модуль памяти. Процессор цифровой обработки сигналов в однокристальном микрокомпьютере сокращенно обозначен как DSP.
Подсистема текущего контроля отдельного суперконденсатора содержит отдельный суперконденсатор 1, блок 7 подачи питания, ведомый однокристальный микрокомпьютер 11, модуль 3 связи на основе несущей, блок 9 регистрации напряжения и тока, блок 10 регистрации температуры и блок 6 хранения. Линии электропитания соединяют подсистему текущего контроля отдельного суперконденсатора с главной системой текущего контроля. Блок подачи питания отвечает за подачу питания; блоки для регистрации напряжения, тока и температуры соединены с ведомым однокристальным микрокомпьютером MSP430, ведомый однокристальный микрокомпьютер MSP430 регистрирует информацию о напряжении, токе и температуре, непрерывно передаваемую через каждые порты, и вычисляет состояние заряда (SOC) суперконденсатора; ведомый однокристальный микрокомпьютер MSP430 соединен с блоком хранения для хранения данных и отправки этих данных в ведущий однокристальный микрокомпьютер в главной системе текущего контроля; при этом передача данных между подсистемой текущего контроля отдельного суперконденсатора и главной системой текущего контроля реализована посредством модуля PL2102 связи на основе несущей через линии электропитания. Состояние заряда суперконденсатора сокращенно обозначено как SOC.
Главная система текущего контроля заряжает батарею суперконденсаторов через линии электропитания и зарядную схему 2, а линии электропитания также служат в качестве средства связи; связь между главной системой текущего контроля и подсистемами текущего контроля отдельных суперконденсаторов реализована посредством модуля связи на основе несущей через линии электропитания; выполнена одна главная система текущего контроля, и выполнены одна или более подсистем текущего контроля отдельных суперконденсаторов; каждая подсистема текущего контроля отдельного суперконденсатора имеет уникальный адрес и имеет порядковый номер, определяемый ведомым однокристальным микрокомпьютером.
Как главная система текущего контроля, так и ведущие системы текущего контроля получают питание постоянного тока от блока 7 подачи питания, при этом напряжение 3,3 В подается на ведущий однокристальный микрокомпьютер и ведомые однокристальные микрокомпьютеры, напряжение 5 В подается на модуль связи на основе несущей, и напряжение 12 В подается в схему усилителя мощности несущей.
В подсистеме текущего контроля отдельного суперконденсатора ведомый однокристальный микрокомпьютер MSP430 имеет предварительные настройки на несколько уровней пороговых значений выдачи предупреждений, согласно модели и техническим характеристикам суперконденсатора, при этом максимальное допустимое значение вычисленного состояния заряда (SOC) суперконденсатора представляет собой пороговое значение 1, а максимально допустимое значение вычисленной скорости изменения состояния SOC заряда представляет собой пороговое значение 2. Вычисленная скорость изменения состояния SOC заряда суперконденсатора определена как отношение разности между соседними вычисленными значениями состояния SOC заряда суперконденсатора к интервалу выборки.
В подсистеме текущего контроля отдельного суперконденсатора блок 10 регистрации температуры использует высокоточный датчик температуры, выполненный с возможностью точного измерения фактической температуры; блок 9 регистрации напряжения и тока соединен с двумя концами суперконденсатора для точного измерения значения напряжения и тока; ведомый однокристальный микрокомпьютер MSP430 регистрирует значение напряжения, тока и температуры, непрерывно передаваемое от портов, и вычисляет состояние SOC заряда и скорость изменения состояния SOC заряда суперконденсатора с помощью алгоритма калмановской фильтрации.
Когда значение состояния SOC заряда и скорость изменения отдельного суперконденсатора находятся в диапазонах заданных пороговых значений, подсистема текущего контроля отдельного суперконденсатора отправляет однобайтовую информацию квитирования в главную систему текущего контроля с приоритетом, определяемым как 1; когда вычисленное значение состояния SOC заряда суперконденсатора находится в диапазоне порогового значения 1, а вычисленная скорость изменения состояния SOC заряда суперконденсатора находится вне диапазона порогового значения 2, подсистема текущего контроля отдельного суперконденсатора отправляет однобайтовую информацию квитирования и двухбайтовую вычисленную скорость изменения состояния SOC заряда суперконденсатора в главную систему текущего контроля с приоритетом, определяемым как 2; когда скорость изменения состояния SOC заряда отдельного суперконденсатора находится в диапазоне порогового значения 2 и вычисленное значение состояния SOC заряда суперконденсатора находится вне диапазона порогового значения 1, подсистема текущего контроля отдельного суперконденсатора отправляет однобайтовую информацию квитирования и двухбайтовое вычисленное значение состояния SOC заряда в главную систему текущего контроля с приоритетом, определяемым как 3; когда значение состояния SOC заряда и скорость изменения состояния SOC заряда отдельного суперконденсатора находятся вне диапазонов заданных пороговых значений, подсистема текущего контроля отдельного суперконденсатора отправляет однобайтовую информацию квитирования, двухбайтовое значение состояния SOC заряда и двухбайтовую скорость изменения состояния SOC заряда в главную систему текущего контроля с приоритетом, определяемым как 4.
Когда ведомый однокристальный микрокомпьютер MSP430 находится в состоянии передачи, модуль PL2102 связи на основе несущей выдает и передает цифровые сигналы, отправленные от однокристального микрокомпьютера MSP430, в схему формирователя, после внутренней дифференциальной фазовой манипуляции (DPSK), и выдает модулированные сигналы; затем сигналы через трансформатор связывают с линиями питания постоянного тока. Дифференциальная фазовая манипуляция в модуле PL2102 связи на основе несущей сокращенно обозначена как DPSK.
Система использует основанный на приоритете принцип множественного доступа CSMA/CA с контролем несущей и предотвращением конфликтов для работы с запросами при одновременной отправке данных от множества подсистем текущего контроля. Когда ведомый однокристальный микрокомпьютер готов к передаче данных, сначала он определяет, имеется ли какой-либо сигнал в полосе частот в линии связи; если такой сигнал имеется, ведомый однокристальный микрокомпьютер ждет в течение определенного времени, а затем снова осуществляет измерение линии связи до тех пор, пока он не обнаружит, что линия свободна или достигнуто максимально допустимое количество попыток. Когда ведомый однокристальный микрокомпьютер обнаруживает, что линия свободна, он передает данные в ведущий однокристальный микрокомпьютер; когда ведомый однокристальный микрокомпьютер обнаруживает, что достигнуто максимально допустимое количество попыток, чтобы гарантировать правильность данных, он перестает учитывать эти данные, выбирает новые данные, подлежащие отправке, и повторяет процесс, описанный выше. При этом время ожидания определено как время отката, а максимально допустимое количество попыток определено как максимальные значения времени отката. В этой системе время отката и максимальные значения времени отката ведомого однокристального микрокомпьютера определены согласно приоритету данных, подлежащих отправке. Чем выше приоритет, тем меньше время отката и меньше максимальные значения времени отката. При практическом применении конкретные время отката и максимальные значения времени отката определены согласно требованиям к точности системы и параметрам отдельных конденсаторов.
Функция ведущего однокристального микрокомпьютера в главной системе текущего контроля заключается в приеме данных, отправленных из подсистем текущего контроля отдельных суперконденсаторов в состоянии передачи. Когда главная система текущего контроля находится в состоянии приема, сигналы с расширенным спектром в линиях питания постоянного тока передаются посредством трансформатора связи через частотно-избирательную схему по частоте приема в модуль PL2102 связи на основе несущей для демодуляции и затем демодулированные сигналы вводят в процессор DSP цифровой обработки сигналов в однокристальном микрокомпьютере.
Главная система текущего контроля отображает информацию, принятую от подсистем текущего контроля согласно категории и уведомляет оператора. В том случае, когда приоритет информации выше 2, главная система текущего контроля непосредственно останавливает процесс заряда и отображает соответствующий порядковый номер отдельного суперконденсатора на человеко-машинном интерфейсе.
Как главная система текущего контроля, так и подсистемы текущего контроля отдельных суперконденсаторов включают в себя блок 6 хранения соответственно, выполненный с возможностью хранения данных и загрузки этих данных через последовательный порт в модуле RS-232 для обеспечения возможности последующего анализа работы суперконденсатора.
Человеко-машинный интерфейс 5 отображает и обновляет состояние заряда отдельных суперконденсаторов в реальном времени. В случае появления любой важной предупредительной информации, относящейся к суперконденсатору, человеко-машинный интерфейс заставляет индикатор предупредительной сигнализации светиться и мигать и одновременно выдает звуковое предупреждение.
| название | год | авторы | номер документа |
|---|---|---|---|
| Универсальная роботизированная платформа | 2016 |
|
RU2639009C1 |
| Система накопления и распределения энергии и способ ее эксплуатации | 2020 |
|
RU2737616C1 |
| СИСТЕМА И СПОСОБ УПРАВЛЕНИЯ ПОТРЕБЛЕНИЕМ ЭНЕРГИИ ДЛЯ КУХОННОГО ЭЛЕКТРИЧЕСКОГО БЫТОВОГО УСТРОЙСТВА | 2020 |
|
RU2833369C2 |
| СПОСОБ ЭКСПЛУАТАЦИИ НИКЕЛЬ-ВОДОРОДНЫХ АККУМУЛЯТОРНЫХ БАТАРЕЙ СИСТЕМЫ ЭЛЕКТРОПИТАНИЯ ЛЕТАТЕЛЬНЫХ АППАРАТОВ | 2015 |
|
RU2621694C9 |
| СИСТЕМА УПРАВЛЕНИЯ ПИТАНИЕМ БЕСПИЛОТНОГО ЛЕТАТЕЛЬНОГО АППАРАТА | 2021 |
|
RU2779934C1 |
| СИСТЕМА АКТИВНОГО ШУМОПОДАВЛЕНИЯ И ПОДАВЛЕНИЯ ВИБРАЦИИ | 2016 |
|
RU2709700C2 |
| СПОСОБ ЭКСПЛУАТАЦИИ НИКЕЛЬ-ВОДОРОДНЫХ АККУМУЛЯТОРНЫХ БАТАРЕЙ СИСТЕМЫ ЭЛЕКТРОПИТАНИЯ МОДУЛЬНОГО ИСПОЛНЕНИЯ (ВАРИАНТЫ) | 2014 |
|
RU2585171C1 |
| УСТРОЙСТВО И СПОСОБ БЕСПРОВОДНОЙ ЗАРЯДКИ, И УСТРОЙСТВО, ПОДЛЕЖАЩЕЕ ЗАРЯДКЕ | 2018 |
|
RU2727724C1 |
| Устройство для определения износа скользящей муфты направляющего подъемника стального троса шахтного ствола и способ его определения | 2018 |
|
RU2704092C1 |
| АВТОНОМНАЯ СИСТЕМА ЭЛЕКТРОСНАБЖЕНИЯ | 1991 |
|
RU2035109C1 |
Использование: в области электротехники. Технический результат – повышение эффективности работы системы и уменьшение нагрузки на сеть связи. Система текущего контроля для зарядки суперконденсатора содержит линию питания, подсистемы для текущего контроля мономерных суперконденсаторов и ведущую систему текущего контроля. Ведущая система текущего контроля содержит зарядную схему (2), блок (7) подачи питания, ведущий однокристальный микрокомпьютер (4), модуль (3) связи на основе несущей, модуль (5) человеко-машинного интерфейса, блок (6) хранения и модуль RS-232 (8). Каждая из подсистем для текущего контроля мономерных суперконденсаторов содержит мономерный суперконденсатор (1), блок (7) подачи питания, ведомый однокристальный микрокомпьютер (11), модуль (3) связи на основе несущей, блок (9) регистрации напряжения, тока и температуры и блок (6) хранения. Ведущая система текущего контроля заряжает группу суперконденсаторов через линию питания и зарядную схему. Система текущего контроля может управлять состояниями заряда различных мономерных суперконденсаторов, благодаря чему удается избежать чрезмерного заряда. 1 ил.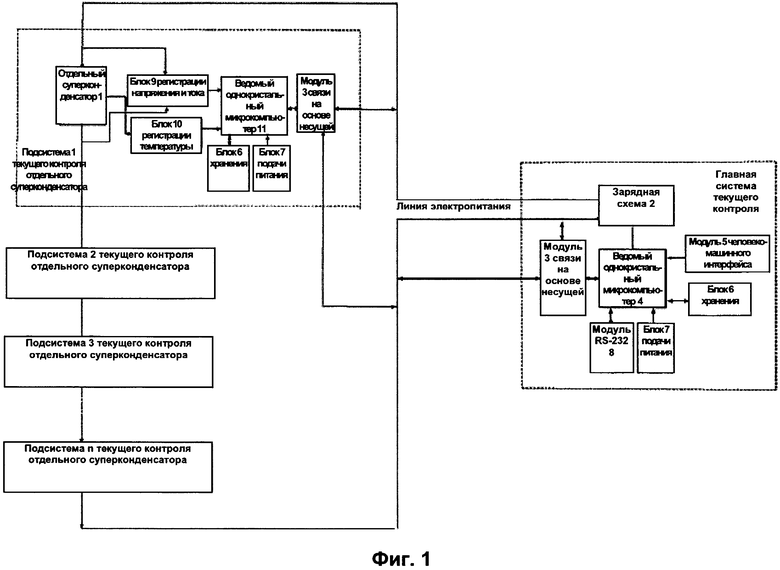
Система текущего контроля для зарядки суперконденсаторов, содержащая линии питания, подсистемы текущего контроля отдельных суперконденсаторов и главную систему текущего контроля, причем
главная система текущего контроля принимает данные, отправляемые от подсистем текущего контроля, и содержит блок подачи питания, ведущий однокристальный микрокомпьютер, модуль PL2102 связи на основе несущей, модуль человеко-машинного интерфейса, блок хранения, модуль RS-232 и зарядную схему;
блок подачи питания подает электрическое питание на ведущий однокристальный микрокомпьютер, при этом ведущий однокристальный микрокомпьютер соединен с модулем PL2102 связи на основе несущей и использует носитель в виде линии питания для осуществления связи между подсистемами текущего контроля отдельных суперконденсаторов и главной системой текущего контроля через линии электропитания, которые служат в качестве соответствующего средства;
ведущий однокристальный микрокомпьютер соединен с модулем человеко-машинного интерфейса для выдачи предупреждений и осуществления отображения;
ведущий однокристальный микрокомпьютер соединен с блоком хранения и соединен с компьютером через последовательные порты в модуле RS-232;
ведущий однокристальный микрокомпьютер соединен с зарядной схемой и управляет зарядной схемой для вывода соответствующего электрического тока согласно состоянию заряда;
ведущий однокристальный микрокомпьютер в главной системе текущего контроля принимает данные, отправляемые из подсистем текущего контроля отдельных суперконденсаторов в состоянии передачи;
когда главная система текущего контроля находится в состоянии приема, сигнал с расширенным спектром в линии электропитания постоянного тока передается посредством трансформатора связи через частотно-избирательную схему по частоте приема в модуль PL2102 связи на основе несущей для демодуляции и затем вводится в процессор цифровой обработки сигналов в однокристальном микрокомпьютере;
если состояние заряда отдельного суперконденсатора является ненормальным, главная система текущего контроля выдает команду об ошибке, вырабатывает предупредительный сигнал, останавливает процесс заряда и отображает соответствующий порядковый номер отдельного суперконденсатора на человеко-машинном интерфейсе;
подсистема текущего контроля отдельного суперконденсатора принимает информацию о данных, выполняет операции с данными и обработку для вычисления состояния заряда (SOC) отдельного суперконденсатора, оценивает состояние отдельного суперконденсатора и выборочно передает эти данные в главную систему текущего контроля;
подсистема текущего контроля отдельного суперконденсатора содержит отдельный суперконденсатор, блок подачи питания, ведомый однокристальный микрокомпьютер, модуль связи на основе несущей, блоки для регистрации напряжения, тока и температуры и блок хранения;
блок подачи питания отвечает за подачу питания, блоки для регистрации напряжения, тока и температуры соединены с ведомым однокристальным микрокомпьютером, при этом ведомый однокристальный микрокомпьютер регистрирует информацию о напряжении, токе и температуре, непрерывно передаваемую через каждые порты, и вычисляет состояния SOC заряда суперконденсатора;
ведомый однокристальный микрокомпьютер соединен с блоком хранения для хранения данных и отправки этих данных в ведущий однокристальный микрокомпьютер в главной системе текущего контроля;
при этом передача данных между подсистемами текущего контроля отдельных суперконденсаторов и главной системой текущего контроля реализована посредством модуля PL2102 связи на основе несущей через линии электропитания;
главная система текущего контроля заряжает батарею суперконденсаторов через линии электропитания и зарядную схему, а линии электропитания также служат в качестве средства связи;
связь между главной системой текущего контроля и подсистемами текущего контроля отдельных суперконденсаторов реализована посредством модуля связи на основе несущей через линии электропитания;
выполнена одна главная система текущего контроля, и выполнены одна или более подсистем текущего контроля отдельных суперконденсаторов;
каждая подсистема текущего контроля отдельного суперконденсатора имеет уникальный адрес и имеет порядковый номер, определяемый ведомым однокристальным микрокомпьютером.
| CN 101574932 A, 11.11.2009 | |||
| Устройство для испытания электрических двигателей | 1946 |
|
SU72584A1 |
| JP 2005218180 A, 11.08.2005. | |||

