Изобретение относится к области электротехники и может быть использовано при создании источников питания беспилотного летательного аппарата (БПЛА).
Известна трехуровневая система управления аккумуляторной батареей (патент РФ № 2722112, H01M 10/46, H02J 7/00, опубл. 26.05.2020 г.). Трехуровневая система управления аккумуляторной батареей содержит связанные с борнами аккумуляторных элементов блоки управления нижнего уровня, включающие балансировочные резисторы, ключи, датчики температуры, контроллеры аккумуляторных элементов, включающие аналоговые цепи измерения и управления, контроллеры аккумуляторных элементов подключены по каналам связи к групповым контроллерам, которые подключены по каналам связи к главному контроллеру, подключенному к внешней ЭВМ по каналу связи, аккумуляторные элементы установлены в корпус конструктивного модуля, адаптеры аккумуляторных элементов, включающие балансировочные резисторы, ключи, датчики температуры, расположены непосредственно на аккумуляторных элементах, а контроллеры аккумуляторных элементов, включающие аналоговые цепи измерения и управления, расположены за пределами корпуса конструктивного модуля аккумуляторных элементов и связаны с адаптерами аккумуляторных элементов проводниковыми линиями.
Недостатками технического решения является отсутствие источника питания для внешней ЭВМ (автопилотной системы) и бортовой электроники беспилотного летательного аппарата (основной и резервной), подсистемы коммутации основной силовой цепи, встроенного зарядного устройства.
Известна система управления аккумуляторной батареей, содержащая блок общего управления и блоки управления каждой ячейкой из множества ячеек аккумуляторной батареи, причем каждой ячейкой множества управляет собственный блок, содержащий микроконтроллер, выполненный с возможностью получения данных о состоянии ячейки, передачи полученной информации в блок общего управления и балансировки напряжения ячеек большими токами (при получении управлявшей команды от блока общего управления), причем режим балансировки эффективно работает в любом режиме работы батареи (при заряде, при разряде и в состоянии покоя), причем множество ячеек аккумуляторной батареи по постоянному току соединены последовательно, а по переменному току параллельно через систему трансформаторной балансировки, а каждая ячейка снабжена преобразователем постоянного тока в переменный ток, причем преобразователи синхронизированы общим управляющим сигналом от блока общего управления (патент РФ 153793, H02M 7/00, опубл. 10.08.2015 г.).
Недостатками технического решения является отсутствие источника питания для внешней ЭВМ (автопилотной системы) и бортовой электроники беспилотного летательного аппарата (основной и резервной), применение активной системы балансировки, которая имеет худшие по сравнению с пассивной массогабаритные показатели, показатели надежности, более высокую стоимость производства, хуже поддается масштабированию.
Известна система управления аккумуляторной батареей, соединенная с батареей и управляющая ее зарядкой/разрядкой (патент РФ 2627295, H02J 7/00, B60L 11/18, опубл. 07.08.2017 г.). Система содержит: датчик тока, который измеряет значение тока путем определения зарядного/разрядного тока, протекающего через батарею; датчик напряжения, который определяет напряжение батареи; датчик температуры, который определяет температуру батареи; расчетчик действующего значения тока, который на основании значения тока, измеренного датчиком тока, рассчитывает действующее значение тока в заданном временном окне; расчетчик временного коэффициента, который определяет временной коэффициент, указывающий долю времени, в течение которой действующее значение тока превышает заданное допустимое значение на протяжении заданного периода времени; и ограничитель зарядки/разрядки, который ограничивает зарядный/разрядный ток на основании временного коэффициента, определенного расчетчиком временного коэффициента.
Недостатками технического решения является отсутствие источника питания для внешней ЭВМ (автопилотной системы) и бортовой электроники беспилотного летательного аппарата (основной и резервной), коммуникационного интерфейса для подключения внешней ЭВМ, цепей балансировки.
Известна система управления аккумуляторной батареей, содержащая блок общего управления и блоки управления каждой ячейкой из множества ячеек аккумуляторной батареи (патент РФ 2546978, H01M 10/42, H02J 7/12, H02H 7/18, опубл. 10.04.2015 г.), выбранная в качестве прототипа. Каждой ячейкой множества управляет собственный блок, содержащий микроконтроллер, выполненный с возможностью получения данных о состоянии ячейки, передачи полученной информации в блок общего управления и балансировки напряжения ячеек большими токами (при получении управлявшей команды от блока общего управления). Балансировка эффективно работает в любом режиме работы батареи (при заряде, при разряде и в состоянии покоя). Множество ячеек аккумуляторной батареи по постоянному току соединены последовательно, а по переменному току - параллельно через систему трансформаторной балансировки. Каждая ячейка снабжена преобразователем постоянного тока в переменный ток. Преобразователи синхронизированы общим управляющим сигналом от блока общего управления.
Недостатками технического решения является отсутствие источника питания для внешней ЭВМ (автопилотной системы) и бортовой электроники беспилотного летательного аппарата (основной и резервной), применение активной системы балансировки, которая имеет худшие по сравнению с пассивной массогабаритные показатели, показатели надежности, более высокую стоимость производства, хуже поддается масштабированию.
Задачей настоящего изобретения является создание интегрированной масштабируемой и надежной системы питания БПЛА с резервированием основного функционала.
Преимущества заявленного изобретения:
- Сокращение времени заряда и увеличение срока службы источника питания беспилотного летательного аппарата (батареи);
- Обеспечение бортового радиоэлектронного оборудования беспилотного летательного аппарата низковольтным питанием с резервированием;
- Обеспечение передачи данных о текущем состоянии источника питания беспилотного летательного аппарата системе автопилота и зарядному устройству;
- Сбор и накопление сведений о параметрах источника питания в разных режимах работы и отслеживание изменения параметров в процессе длительной эксплуатации;
- Повышение безопасности эксплуатации источника питания беспилотного летательного аппарата на всех этапах работы (зарядка, разрядка, хранение), предупреждение аварийных ситуаций;
- Упрощение процедуры зарядки источника питания.
Подсистема балансировки высокими токами обеспечивает возможность отвода тока зарядки от аккумуляторных элементов на этапах заряда, близких к полному. Подсистема коммутации основной силовой цепи позволяет прерывать процесс зарядки до выравнивания напряжения на последовательных аккумуляторных элементах. В комбинации эти системы позволяют заряжать батарею токами большой величины на всех этапах зарядки, вместе с тем не допуская перезарядки последовательных аккумуляторных элементов. Система может быть настроена таким образом, чтобы сигнализировать внешним устройства об опасности переразрядки батареи и/или отключения основной цепи.
Система оснащена преобразователями напряжения и системой коммутации первого последовательного аккумуляторного элемента, подключаемыми к цепям низковольтного питания БПЛА. Коммутация первого последовательного аккумуляторного элемента так же служит дискретным сигналом аварийной ситуации для БПЛА и зарядного устройства. Подсистемой низковольтного питания с резервированием может ограниченно управлять каждый из вычислительных узлов, входящих в состав системы.
Система оснащена коммуникационным интерфейсом с резервированием, а также дискретной сигнальной линией, так же служащей резервной линией питания для внешних устройств.
Система оснащена ПЗУ большой емкости, подключенному к основному вычислительному узлу системы.
Система оснащена подсистемами коммутации основной силовой цепи, подсистемами измерения основных параметров состояния источника питания (напряжения, ток, температура, состояние заряда), подсистемами коммуникации с внешними устройствами, непрерывно выполняющими передачу данных о текущем состоянии источника питания(батареи), подсистемами визуального и звукового оповещения о состоянии источника питания.
Система оснащена подсистемой коммутации основной силовой цепи и встроенным зарядным устройством низкой мощности с высоким диапазоном входных напряжений постоянного тока, что позволяет расширить выбор применяемых зарядных устройств.
На фиг.1 представлена структурная схема системы.
Система располагается в одном корпусе с аккумуляторной батареей 1 и может быть выполнена на одной или нескольких печатных платах 22, соединенных проводными соединениями и/или разъемами. Аккумуляторная батарея 1 состоит из последовательно включенных элементов 2. Последовательно включенные элементы 2 аккумуляторной батареи 1 при помощи проводных соединений и разъемов подключаются к цепям балансировки измерения 4. Датчики температуры 5 на проводниках закрепляются на последовательных элементах 2 аккумуляторной батареи 1. Схемы контроллеров балансировки 3 подключены к цепям балансировки и измерения 4 соединениями на печатную плату 22 к датчикам температуры 5 посредством проводных соединений. Схемы контроллеров балансировки 3 подключены к общей сигнальной линии 17. Схемы контроллеров балансировки 3 подключены к схемам основного 6 и сторожевого 7 контроллеров каналом передачи данных. Сторожевой контроллер 7 соединен со стабилизаторами напряжения 8 дискретными линиями управления и цепями измерения. Стабилизаторы напряжения 8 подключены проводным соединениям к контактам аккумуляторной батареи 1. Стабилизаторы напряжения подключены к коммутатору низковольтного питания 11. Коммутатор низковольтного питания 11 подключен к мультиплексору внутренних аварийных сигналов 18 и первому последовательному элементу аккумуляторной батареи 1. Коммутатор низковольтного питания 11подключается к внешним цепям (цепям низковольтного питания БПЛА) при помощи проводников и разъемного соединения. Мультиплексор аварийных сигналов подключается ко всем вычислительным устройствам в составе системы (основному контроллеру 6, сторожевому контроллеру 7, контроллерам балансировки 3 и к силовому коммутатору). Силовой коммутатор 9 через датчики тока и напряжения 10 подключен к основным силовым выводам аккумуляторной батареи 23 и к внешним вывода основной силовой цепи системы 12. Встроенное зарядное устройство 16 подключено через датчики тока и напряжения 10 к силовому коммутатору 9, и к основным силовым выводам аккумуляторной батареи 23, и к основному контроллеру 6. Подсистемы коммуникации 14 подключаются к внешним цепям передачи данных 14 через разъемное соединение и к схеме основного контроллера системы 6. Постоянное запоминающее устройство 20 и системы индикации и оповещения 21 подключены к схеме основного контроллера системы 6.
Можно выделить 3 режима работы системы:
1) Неактивный
2) Активный (разрядка)
3) Зарядка
В режиме 1 система находится в режиме пониженного энергопотребления, сторожевой контроллер 7 периодически анализирует состояние системы, ожидая подключения внешнего устройства или возникновения аварийной ситуации. Сторожевой контроллер 7 принимает решение об активации остальных подсистем при переходе в другие режимы или сигнализировании о неисправности. При детектировании подключения внешнего устройства, сторожевой контроллер 7 активирует основной контроллер 6 и тот принимает решение о переводе системы в режим 2 или 3.
В режиме 2 все подсистемы активируются сторожевым контроллером 7 при детектировании подключения. Основной контроллер 6 диагностирует работоспособность коммуникационного интерфейса 15 и подключенных внешних устройств и принимает решение о включении силового коммутатора 9 и подаче высоковольтного питания во внешнюю цепь 12. В режиме 1 основной контроллер 6 схемы измеряет ток основной силовой цепи и общее напряжение аккумуляторной батареи 1 при помощи датчиков 9, получает данные о напряжении и температуре отдельных последовательных элементов 2 от контроллеров балансировки 3 и предает информацию внешним устройствам по коммуникационному интерфейсу 14. При детектировании нештатной ситуации или выходе значений параметров аккумуляторной батареи 1 или ее составляющих 2 за пределы, предусмотренные штатным рабочим режимом, основной контроллер 6 может сообщать внешним устройствам о возникновении нештатной ситуации по коммуникационному интерфейсу 14, дискретной аварийной линии 24 и/или размыкать основную силовую цепь 12 в зависимости от программной конфигурации. Размыкание основной силовой цепи и активацию дискретной аварийной линии 24 так же могут осуществить сторожевой контроллер 7 и контроллеры балансировки 3 по внутренней аварийной линии 17 через мультиплексор аварийных сигналов 18.
В режиме 3 основной контроллер 6 определяет тип подключенного зарядного устройства и принимает решение о подключении зарядного устройства к общим выводам аккумуляторной батареи или включении встроенного зарядного устройства 16, таким образом начиная процесс зарядки, или об отказе от коммутации. В процессе зарядки основной контроллер 6 измеряет зарядный ток, общее напряжение аккумуляторной батареи при помощи датчиков 9, получает информацию о напряжении и температуре отдельных последовательных элементов 2 от контроллеров балансировки 3. Контроллеры балансировки 3 измеряют напряжение и температуру отдельных элементов, передают информацию на основной контроллер 6 по внутреннему коммуникационному интерфейсу 23 и осуществляют балансировку последовательных элементов путем отвода тока заряда через балансировочные цепи 4, предотвращая таким образом перезарядку отдельных последовательных элементов 2. Ток балансировки регулируется контроллером балансировки на основе информации о скорости изменения напряжения и температуры цепи балансировки и последовательного элемента 2. При детектировании нештатной ситуации или выходе значений параметров аккумуляторной батареи 1 или ее составляющих 2 за пределы, предусмотренные штатным рабочим режимом, основной контроллер 6 может сообщать внешним устройствам о возникновении нештатной ситуации по коммуникационному интерфейсу 14, дискретной аварийной линии 24 и/или размыкать основную силовую цепь 12 в зависимости от программной конфигурации. Размыкание основной силовой цепи 12 и активацию дискретной аварийной линии 24 так же могут осуществить сторожевой контроллер 7 и контроллеры балансировки 3 по внутренней аварийной линии 17 через мультиплексор аварийных сигналов 18.
Во всех режимах работы сторожевой контроллер 7 отслеживает активность остальных вычислительных устройств системы и основные параметры аккумуляторной батареи 1. При детектировании нештатной ситуации или выходе значений параметров аккумуляторной батареи 1 или ее составляющих 2 за пределы, предусмотренные штатным рабочим режимом, сторожевой контроллер 7 активирует аварийную сигнальную линию системы 24 и системы оповещения 21.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для зарядки БПЛА от провода воздушной линии электропередачи | 2023 |
|
RU2811167C1 |
| СПОСОБ ЗАРЯДА АККУМУЛЯТОРНЫХ БАТАРЕЙ БЕСПИЛОТНЫХ ЛЕТАТЕЛЬНЫХ АППАРАТОВ | 2015 |
|
RU2593207C1 |
| УСТРОЙСТВО ДЛЯ ЭЛЕКТРОПИТАНИЯ ПРИВЯЗНОГО БЕСПИЛОТНОГО ЛЕТАТЕЛЬНОГО АППАРАТА | 2023 |
|
RU2815590C1 |
| Малогабаритное бортовое радиоэлектронное устройство для управления пилотажно-навигационным комплексом беспилотного летательного аппарата | 2021 |
|
RU2799748C2 |
| УСТРОЙСТВО ДЛЯ АВТОМАТИЧЕСКОЙ ФИКСАЦИИ БЕСПИЛОТНОГО ЛЕТАТЕЛЬНОГО АППАРАТА ВЕРТОЛЕТНОГО ТИПА НА ПОСАДОЧНОЙ ПЛОЩАДКЕ БЕЗЭКИПАЖНОГО СУДНА С БЕСКОНТАКТНОЙ ПЕРЕДАЧЕЙ ЭЛЕКТРОЭНЕРГИИ ДЛЯ ЗАРЯДА АККУМУЛЯТОРНЫХ БАТАРЕЙ | 2021 |
|
RU2765726C1 |
| Беспилотный летательный аппарат | 2016 |
|
RU2617320C1 |
| Устройство подзарядки аккумуляторных элементов беспроводной сенсорной сети | 2024 |
|
RU2826802C1 |
| Система автоматической дозаправки беспилотного летательного аппарата | 2020 |
|
RU2757400C1 |
| СПОСОБ КОНТРОЛЯ И УПРАВЛЕНИЯ СОСТОЯНИЕМ АККУМУЛЯТОРНЫХ БАТАРЕЙ И СХЕМА ДЛЯ НЕГО | 2024 |
|
RU2833507C1 |
| Способ накопления и стабилизации вырабатываемого напряжения бесколлекторным генератором в составе гибридной силовой установки | 2018 |
|
RU2708118C1 |

Изобретение относится к области электротехники и может быть использовано при создании источников питания беспилотного летательного аппарата (БПЛА). Технический результат заключается в повышении надежности системы питания БПЛА. Система управления питанием беспилотного летательного аппарата, поддерживающая режим балансировки, который работает при заряде, при разряде батареи, а также в состоянии покоя, отличающаяся тем, что содержит источник питания для бортового радиоэлектронного оборудования c резервированием, подсистему коммутации основной силовой цепи, дискретную аварийную линию прерывания для полетного контроллера и зарядного устройства, которая по совместительству является линией резервного питания беспилотного летательного аппарата, коммуникационный интерфейс с резервированием для коммуникации с беспилотным летательным аппаратом и зарядным устройством, встроенное зарядное устройство низкой мощности с высоким диапазоном входных напряжений постоянного тока, подсистему визуального и звукового оповещения. 1 ил.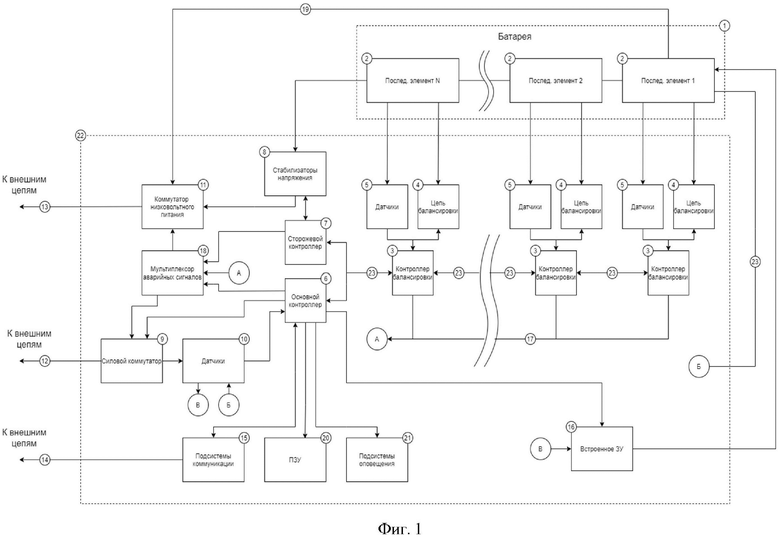
Система управления питанием беспилотного летательного аппарата, поддерживающая режим балансировки, который работает при заряде, при разряде батареи, а также в состоянии покоя, отличающаяся тем, что содержит источник питания для бортового радиоэлектронного оборудования c резервированием, подсистему коммутации основной силовой цепи, дискретную аварийную линию прерывания для полетного контроллера и зарядного устройства, которая по совместительству является линией резервного питания беспилотного летательного аппарата, коммуникационный интерфейс с резервированием для коммуникации с беспилотным летательным аппаратом и зарядным устройством, встроенное зарядное устройство низкой мощности с высоким диапазоном входных напряжений постоянного тока, подсистему визуального и звукового оповещения.
| US 7482709 B2, 27.01.2009 | |||
| АККУМУЛЯТОРНАЯ БАТАРЕЯ И СИСТЕМА УПРАВЛЕНИЯ АККУМУЛЯТОРНОЙ БАТАРЕЕЙ | 2013 |
|
RU2546978C2 |
| СИСТЕМА ЭЛЕКТРОПИТАНИЯ ТРАНСПОРТНОГО СРЕДСТВА | 2012 |
|
RU2520180C2 |
| 0 |
|
SU161470A1 | |

