ОБЛАСТЬ ТЕХНИКИ, К КОТОРОЙ ОТНОСИТСЯ ИЗОБРЕТЕНИЕ
[0001] Настоящее раскрытие относится к автомобильным системам активного шумоподавления и подавления вибрации.
УРОВЕНЬ ТЕХНИКИ
[0002] Система активного шумоподавления (ANC) подавляет шум. Система ANC контролирует шум, например, с использованием микрофона, и выводит шумоподавляющий звук, например, с использованием динамика. Шумоподавляющий звук предназначен быть противоположным по фазе и одинаковым по амплитуде в сравнении с шумом, посредством чего шумоподавляющий звук подавляет шум.
[0003] Система активного подавления вибрации (AVC) подавляет вибрации. Система AVC контролирует вибрации, например, с использованием датчика вибраций, и выводит силы подавления, например, с использованием вибрационного привода. Силы подавления предназначены для нахождения в противофазе и быть одинаковыми по амплитуде в сравнении с силами, прикладываемыми вибрациями, посредством чего силы подавления подавляют вибрации. В итоге, принцип AVC заключается в создании силы на основе обратной связи датчика вибраций для нейтрализации вибрации.
[0004] Система активного подавления звука (ASC) выводит звуковые эффекты для увеличения определенных пространственных и временных характеристик звука в отличие от попытки подавления звука. Система ASC выводит звуковые эффекты, например, с использованием динамика.
СУЩНОСТЬ ИЗОБРЕТЕНИЯ
[0005] Система включает в себя контроллер, аудио подсистему, вибрационную подсистему и цифровую сеть, взаимосвязывающую контроллер и подсистемы. Через цифровую сеть контроллер управляет подсистемами для выполнения функций активного шумоподавления (ANC) и активного подавления вибрации (AVC).
[0006] Аудио подсистема может включать в себя микрофон для обнаружения шума и динамик для вывода шумоподавляющего звука. Микрофон и динамик индивидуально соединены с цифровой сетью в последовательном расположении для связи с контроллером. Контроллер через цифровую сеть управляет динамиком для вывода шумоподавляющего звука, соответствующего шуму, обнаруживаемому микрофоном, для того чтобы подавлять шум.
[0007] Вибрационная подсистема может включать в себя датчик вибраций для обнаружения вибраций и вибрационный привод для создания сил. Датчик вибраций и вибрационный привод индивидуально соединены с цифровой сетью в последовательном расположении для связи с контроллером. Контроллер через цифровую сеть управляет вибрационным приводом для создания силы подавления, соответствующей силе, прикладываемой вибрацией, обнаруживаемой датчиком вибраций, для того чтобы подавлять вибрацию, обнаруживаемую датчиком вибраций.
[0008] Цифровая сеть может быть одиночным контуром, витой парой, способной к распределению аудио- и управляющих данных вместе с тактовым сигналом и питанием.
[0009] Аудио подсистема может включать в себя микрофон, выполненный с возможностью обнаружения шума, и динамик, выполненный с возможностью вывода шумоподавляющего звука, и вибрационная подсистема может включать в себя вибрационный привод, выполненный с возможностью создания сил. Контроллер через цифровую сеть управляет, основываясь на шуме, обнаруживаемом микрофоном, динамиком для вывода шумоподавляющего звука и вибрационным приводом для создания силы, вызывающей создание шумоподавляющего звука.
[0010] Аудио подсистема может включать в себя микрофон, выполненный с возможностью обнаружения шума, и множество динамиков, каждый из которых выполнен с возможностью вывода шумоподавляющего звука. Контроллер через цифровую сеть управляет подмножеством динамиков для вывода шумоподавляющих звуков на основе шума, обнаруживаемого микрофоном. Вибрационная подсистема может включать в себя множество вибрационных приводов, каждый из которых выполнен с возможностью создания сил. В этом случае контроллер через цифровую сеть управляет, основываясь на шуме, обнаруживаемом микрофоном, подмножеством динамиков для вывода шумоподавляющих звуков и подмножеством вибрационных приводов для создания сил, вызывающих создание шумоподавляющих звуков.
[0011] Аудио подсистема может включать в себя динамик, выполненный с возможностью вывода шумоподавляющего звука, и вибрационная подсистема может включать в себя датчик вибраций, выполненный с возможностью обнаружения вибраций, и вибрационный привод, выполненный с возможностью создания сил. Контроллер через цифровую сеть управляет, основываясь на вибрациях, обнаруживаемых датчиком вибраций, вибрационным приводом для создания сил подавления и динамиком для вывода шумоподавляющего звука.
[0012] Вибрационная подсистема может включать в себя датчик вибраций, выполненный с возможностью обнаружения вибраций, и множество вибрационных приводов, каждый из которых выполнен с возможностью создания сил. Контроллер через цифровую сеть управляет подмножеством вибрационных приводов для создания сил подавления на основе вибраций, обнаруживаемых датчиком вибраций. Аудио подсистема может включать в себя множество динамиков, каждый из которых выполнен с возможностью вывода шумоподавляющего звука. В этом случае контроллер через цифровую сеть управляет, основываясь на вибрациях, обнаруживаемых датчиком вибраций, подмножеством вибрационных приводов для создания сил подавления и подмножеством динамиков для вывода шумоподавляющих звуков.
[0013] Аудио подсистема может включать в себя внутренние динамики для вывода шумоподавляющих звуков для противодействия шуму в кабине, динамик системы впуска воздуха для вывода шумоподавляющего звука для противодействия шуму отверстия системы впуска воздуха и динамик выпускной системы для вывода шумоподавляющего звука для противодействия шуму отверстия выхлопной трубы выпускной системы, и вибрационная подсистема может включать в себя вибрационные приводы для создания сил. В этом случае контроллер управляет динамиками и вибрационными приводами в совокупности для функций ANC системы впуска воздуха и выпускной системы.
[0014] Транспортное средство включает в себя цифровую сеть и систему управления, включающую в себя контроллер, аудио подсистему и вибрационную подсистему, взаимосвязанные через цифровую сеть. Через цифровую сеть контроллер управляет подсистемами для выполнения функций активного шумоподавления (ANC) и активного подавления вибрации (AVC). Транспортное средство может дополнительно включать в себя шину локальной сети контроллеров (CAN) и блок управления силовым агрегатом. В этом случае контроллер соединен через шину CAN c блоком управления силовым агрегатом для приема связанной с транспортным средством информации для использования контроллером при выполнении функций ANC и AVC.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
[0015] Фигура 1 иллюстрирует блок-схему системы управления, имеющей активное централизованное шумоподавление и вибрацией через цифровую сеть;
[0016] Фигура 2 иллюстрирует блок-схему системы управления, осуществленной в транспортном средстве;
[0017] Фигура 3 иллюстрирует блок-схему блоков системы управления, взаимосвязанных через цифровую сеть; и
[0018] Фигура 4 иллюстрирует блок-схему системы управления, иллюстрирующую более подробно дополнительные аспекты системы управления.
ПОДРОБНОЕ ОПИСАНИЕ
[0019] Здесь раскрыты подробные варианты выполнения настоящего изобретения; однако следует понимать, что раскрытые варианты выполнения являются всего лишь примерами изобретения, которое может быть осуществлено в различных и альтернативных формах. Фигуры не обязательно выполнены в масштабе; некоторые элементы могут быть увеличены или уменьшены, чтобы показать детали конкретных компонентов. В связи с этим конкретные конструктивные и функциональные детали, раскрытые здесь, не должны интерпретироваться как ограничивающие, а всего лишь как представляющие основу для изучения специалистом в области техники различных способов применения настоящего изобретения.
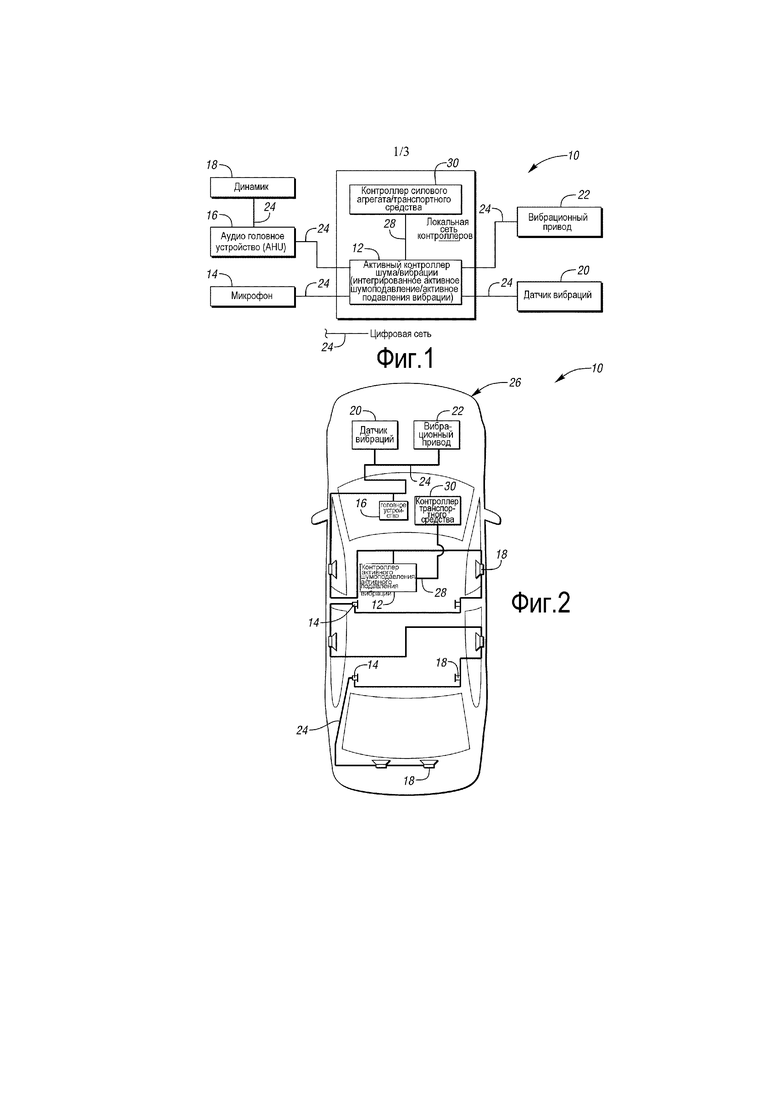
[0020] Фигура 1 иллюстрирует блок-схему системы 10 управления, имеющей активное централизованное шумоподавление и подавление вибрации через цифровую сеть 24. Система 10 управления включает в себя активный контроллер 12 шума и вибрации. Контроллер 12 представляет собой интегрированный контроллер активного шумоподавления (ANC) и активного подавления вибрации (AVC). В связи с этим контроллер 12 представляет собой интегрированный контроллер ANC/AVC. Контроллер 12 выполнен с возможностью выполнения функций ANC для подавления шума и функций AVC для подавления вибраций. Контроллер 12 может дополнительно быть выполнен с возможностью выполнения функций активного подавления звука (ASC).
[0021] Система 10 управления дополнительно включает в себя аудио подсистему для контроллера 12 для выполнения функций ANC (и ASC). Аудио подсистема включает в себя по меньшей мере один микрофон 14. Микрофон 14 выполнен с возможностью обнаружения звука, слышимого в окружающей среде. Нежелательный звук является шумом. В связи с этим микрофон 14 выполнен с возможностью обнаружения шума. Аудио подсистема дополнительно включает в себя аудио головное устройство (AHU) 16 и по меньшей мере один динамик 18. AHU 16 выполнено с возможностью создания аудиосигнала управления для управления динамиком 18. Динамик 18 выполнен с возможностью вывода звука на основе аудиосигнала управления.
[0022] Контроллер 12 выполняет функцию ANC для подавления шума в окружающей среде. Для функции ANC динамик 18 выводит звук, который подавляет шум, обнаруживаемый микрофоном 14. Выходной звук из динамика 18 представляет собой шумоподавляющий звук, противоположный по фазе и одинаковый по амплитуде в сравнении с шумом, обнаруживаемым микрофоном 14. Соответственно, шумоподавляющий звук подавляет шум.
[0023] Система 10 управления дополнительно включает в себя вибрационную подсистему для контроллера 12 для выполнения функций AVC. Вибрационная подсистема включает в себя по меньшей мере один датчик 20 вибраций и по меньшей мере один вибрационный привод 22. Датчик 20 вибраций выполнен с возможностью обнаружения вибраций устройства или вибраций, вызываемых устройством. Устройство вибрирует в результате его работы и/или работы других вибрирующих элементов в механической связи с устройством. Вибрация устройства может создавать шум в окружающей среде в результате вибраций, передаваемых в окружающую среду. Вибрационный привод 22 выполнен с возможностью создания сил. Например, вибрационный привод 22 выполнен с возможностью создания силы подавления в сравнении с силой, прикладываемой вибрациями от вибрации устройства, посредством чего сила подавления подавляют вибрации.
[0024] Контроллер 12 выполняет функцию AVC для подавления вибраций устройства и, таким образом, подавляет шум, который в противном случае будет создаваться из-за вибраций устройства. Для функции AVC вибрационный привод 22 создает силы, которые противодействуют силам от вибраций устройства при обнаружении датчиком 20 вибраций. Например, устройство представляет собой двигатель. Датчик 20 вибраций обнаруживает вибрации двигателя, вызываемые работой двигателя. Вибрационный привод 22 создает силу для подавления вибраций двигателя, вызываемых работой двигателя. Силы, создаваемые вибрационным приводом 22, представляют собой силы подавления, противоположные по фазе и одинаковые по амплитуде в сравнении с силами, прикладываемыми вибрациями двигателя, вызываемыми работой двигателя. Подавление сил, прикладываемых вибрациями двигателя, вызываемыми работой двигателя, тем самым подавляет шум, который в противном случае будет возникать от вибраций двигателя.
[0025] Контроллер 12, аудио подсистема, включающая в себя микрофон 14, AHU 16, и динамик 18, и вибрационная подсистема, включающая в себя датчик 20 вибраций и вибрационный привод 22, все связаны друг с другом через цифровую сеть 24. Контроллер 12 связывается через цифровую сеть 24 с аудио подсистемой и вибрационной подсистемой для выполнения функций ANC и AVC. Например, контроллер 12 связывается с микрофоном 14 для контроля шума, слышимого в окружающей среде, и связывается с динамиком 18 через AHU 16 для вывода шумоподавляющего звука в окружающую среду для подавления шума в окружающей среде. Контроллер 12 связывается с датчиком 20 вибраций для контроля вибраций в окружающей среде и связывается с вибрационным приводом 22 для вывода противодействующих сил для подавления вибраций в окружающей среде.
[0026] Цифровая сеть 24 способна к распределению аудио- и управляющих данных вместе с тактовым сигналом и питанием по одиночной неэкранированной витой паре. Таким образом, благодаря цифровой сети 24, взаимосвязывающей контроллер 12 и аудио и вибрационные подсистемы друг с другом, контроллер может выполнять функции «интегрированного» ANC/AVC. Таким образом, контроллер 12 представляет собой интегрированный контроллер ANC/AVC и в связи с этим может использовать аспекты контроля аудио и/или вибрационных подсистем и аспекты вывода аудио и/или вибрационных подсистем в сочетании друг с другом.
[0027] В отношении использования аспектов контроля вибрационной подсистемы с аспектами вывода аудио подсистемы контроллер 12 может контролировать вибрации с помощью вибрационной подсистемы в сочетании с выводом шумоподавляющего звука с помощью аудио подсистемы. В качестве примера, контроллер 12 связывается с датчиком 20 вибраций для контроля вибраций, которые вызывают шум в окружающей среде. Вместо управления вибрационным приводом 22 для создания противодействующих сил для сведения к нулю контролируемых вибраций контроллер 12 управляет динамиком 18 для вывода шумоподавляющего звука в окружающую среду, который подавляет шум.
[0028] В отношении использования аспектов контроля аудио подсистемы с аспектами вывода вибрационной подсистемы контроллер 12 может контролировать шум с помощью аудио подсистемы в сочетании с выводом сил с помощью вибрационной подсистемы. Контроллер 12 управляет вибрационной подсистемой для вывода сил, которые вызывают создание шумоподавляющего звука, подавляющего шум. В качестве примера, контроллер 12 управляет микрофоном 14 для контроля шума, слышимого в окружающей среде. Вместо связи с динамиком 18 для вывода шумоподавляющего звука в окружающую среду контроллер 12 управляет вибрационным приводом 22 для вывода силы, которая вызывает вибрацию устройства так, что вибрация устройства вызывает создание шумоподавляющего звука в окружающей среде, который подавляет шум.
[0029] Способность интегрированного контроллера 12 ANC/AVC использовать аспекты контроля аудио и/или вибрационных подсистем в сочетании с аспектами вибрации другой одной из аудио и вибрационных подсистем позволяет системе 10 управления иметь «целостный» подход в активном шумоподавлении/подавлении вибрации. В связи с этим контроллер 12 выполнен с возможностью обеспечивать оптимальное решение в подавлении шума или вибрации. Контроллер 12 не ограничен в подавлении шума с помощью шумоподавляющего звука или подавлении нежелательных вибраций с помощью противодействующих сил. Вместо этого, контроллер 12 может подавлять шум с помощью взвешенной комбинации шумоподавляющего звука и противодействующих сил, причем взвешивание может находиться в диапазоне от только шумоподавляющего звука до только противодействующих силы и любой комбинации между ними. Подобным образом, контроллер 12 может подавлять нежелательные вибрации (или шум под действием нежелательных вибраций) с помощью взвешенной комбинации шумоподавляющего звука и противодействующих сил, причем снова взвешивание может находиться в любом диапазоне между только шумоподавляющим звуком и только противодействующими силами.
[0030] Целостный подход контроллера 12 не ограничивается использованием только одного компонента контроля(например, микрофона 14 или датчика 20 вибраций) в сочетании с только одним компонентом вывода (например, динамиком 18 или вибрационным приводом 22). Вместо этого, контроллер 12 может использовать один или более компонентов контроля (например, микрофон 14 и/или датчик 20 вибраций) в сочетании с одним или более компонентами вывода (например, динамиком 18 и/или вибрационным приводом 22). Например, контроллер 12 может использовать микрофон 14 для обнаружения шума в окружающей среде и использовать оба динамик 18 и вибрационный привод 22 для подавления шума. В связи с этим контроллер 12 выбирает шумоподавляющий звук из динамика 18 и вибрационный приводящий выход от вибрационного привода 22, которые складываются вместе для подавления шума. Подобным образом, контроллер 12 может использовать датчик 20 вибраций для обнаружения вибраций в окружающей среде и использовать оба динамик 18 и вибрационный привод 22 для подавления шума, вызываемого вибрациями в окружающей среде. В связи с этим контроллер 12 выбирает шумоподавляющий звук из динамика 18 и вибрационный приводящий выход от вибрационного привода 22, которые складываются вместе для подавления шума, вызываемого вибрациями в окружающей среде.
[0031] Как лучше всего показано на Фигуре 4, аудио подсистема системы 10 управления может включать в себя набор из нескольких микрофонов 14 и набор из нескольких динамиков 18, и вибрационная подсистема системы управления может включать в себя набор из нескольких датчиков 20 вибраций (например, набор акселерометров) и набор вибрационных приводов 22 (например, набор пьезоэлектрических приводов, приводов на звуковой катушке или других приводов 22а и набор активных опор 22b). Целостный подход контроллера 12 позволяет контроллеру использовать любую комбинацию компонентов контроля (например, только один или более или все микрофоны 14, один или более или все микрофоны 14 и один или более или все датчики 20 вибраций, только один или более или все датчики 20 вибраций и т.д.) в сочетании с любой комбинацией компонентов вывода (например, только один или более или все динамики 18, один или более или все динамики 18 и один или более или все вибрационные приводы 22, только один или более или все вибрационные приводы 22 и т.д.). В соответствии с целостным подходом контроллер 12 принимает сигналы датчиков от всех микрофонов 14 и датчиков 20 вибраций и целостным образом оптимизирует управляющий выход для отдельного динамика/вибрационного привода.
[0032] Аудио подсистема может пониматься как включающая в себя несколько аудио подподсистем, каждая из которых включает в себя один или более микрофонов 14 и один или более динамиков 18. Например, аудио подподсистемы могут быть внутренней аудио подподсистемой и внешней аудио подподсистемой. Например, внутренняя аудио подподсистема включает в себя несколько микрофонов 14 и несколько динамиков 18. Внешняя аудио подподсистема включает в себя один микрофон 14 с одним динамиком 18 для выхлопной трубы и/или один микрофон 14 с одним динамиком 18 для впуска воздуха.
[0033] Подобным образом, вибрационная подсистема может пониматься как включающая в себя несколько вибрационных подподсистем, каждая из которых включает в себя один или более датчиков 20 вибраций и один или более вибрационных приводов 22. Например, вибрационные системы включают в себя множество вибрационных подподсистем активных опор. Например, каждая вибрационная подподсистема активной опоры включает в себя одиночный датчик 20 вибраций с одиночным вибрационным приводом 22 для каждой опоры и/или несколько вибрационных приводов 22 в различных местах на панели (например, крыше/подъемной задней двери) с несколькими датчиками 20 вибраций.
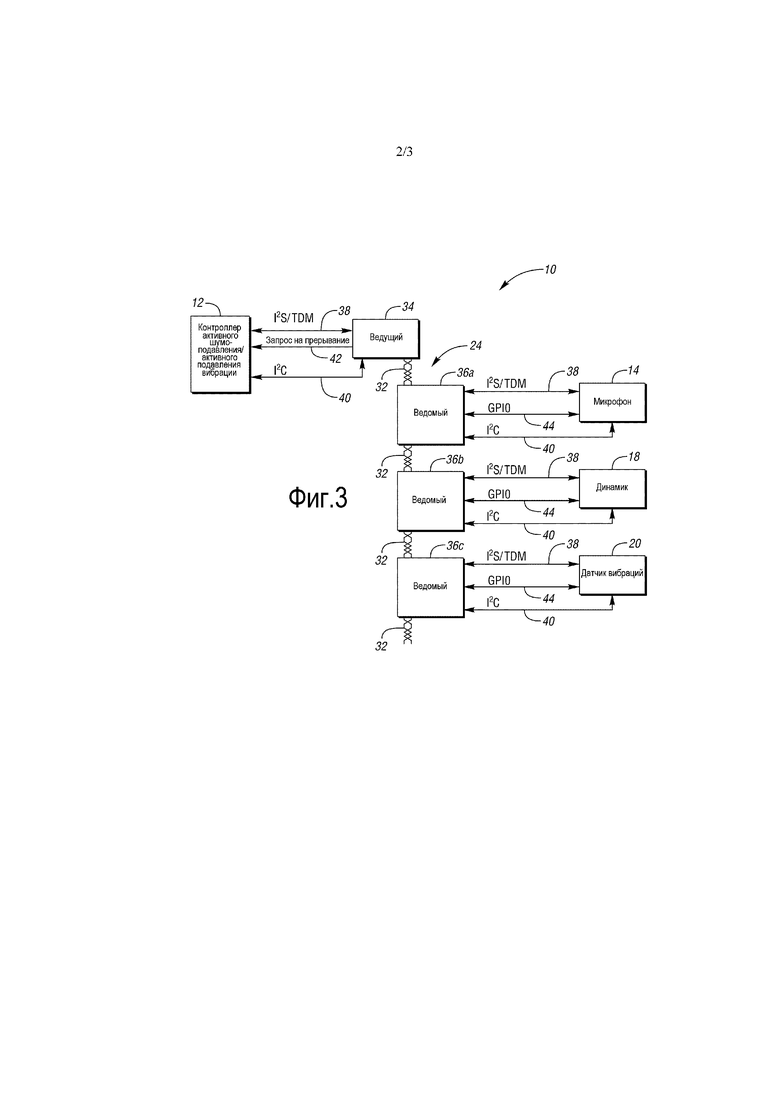
[0034] На Фигуре 2, с постоянной ссылкой на Фигуры 1 и 4, показана блок-схема системы 10 управления, осуществленной в транспортном средстве 26. Как отмечено выше, цифровая сеть 24 включает в себя одиночную, неэкранированную витую пару, способную к распределению аудио- и управляющих данных вместе с тактовым сигналом и питанием. Цифровая сеть 24 проходит через транспортное средство 26 в полном одиночном контуре, как обозначено на Фигуре 2. Контроллер 12, микрофоны 14, AHU 16, и динамики 18 аудио подсистемы, и датчики 20 вибраций (только один показан на Фигуре 2) и вибрационные приводы 22 (только один показан на Фигуре 2) вибрационной подсистемы, все соединены с цифровой сетью 24 в последовательном расположении.
[0035] В варианте выполнения транспортного средства контроллер 12 дополнительно выполнен с возможностью связи через шину 28 локальной сети контроллеров (CAN) с другими устройствами транспортного средства, такими как контроллеры, датчики и т.п. Таким образом, система 10 управления включает и цифровую сеть, и шину CAN. Например, как показано на Фигурах 1, 2 и 4, контроллер 12 может связываться с контроллером 30 транспортного средства (электронным блоком управления (ECU)) через шину 28 CAN. Контроллер 12 принимает от контроллера 30 транспортного средства связанную с транспортным средством информацию, такую как частота вращения двигателя, крутящий момент двигателя, скорость транспортного средства и т.д. Контроллер 12 может использовать связанную с транспортным средством информацию для выполнения функций ANC/AVC (и ASC). Например, контроллер 12 может создавать опорный сигнал, пропорциональный частоте циклов вращения двигателя, для того чтобы создавать шумоподавляющий звук.
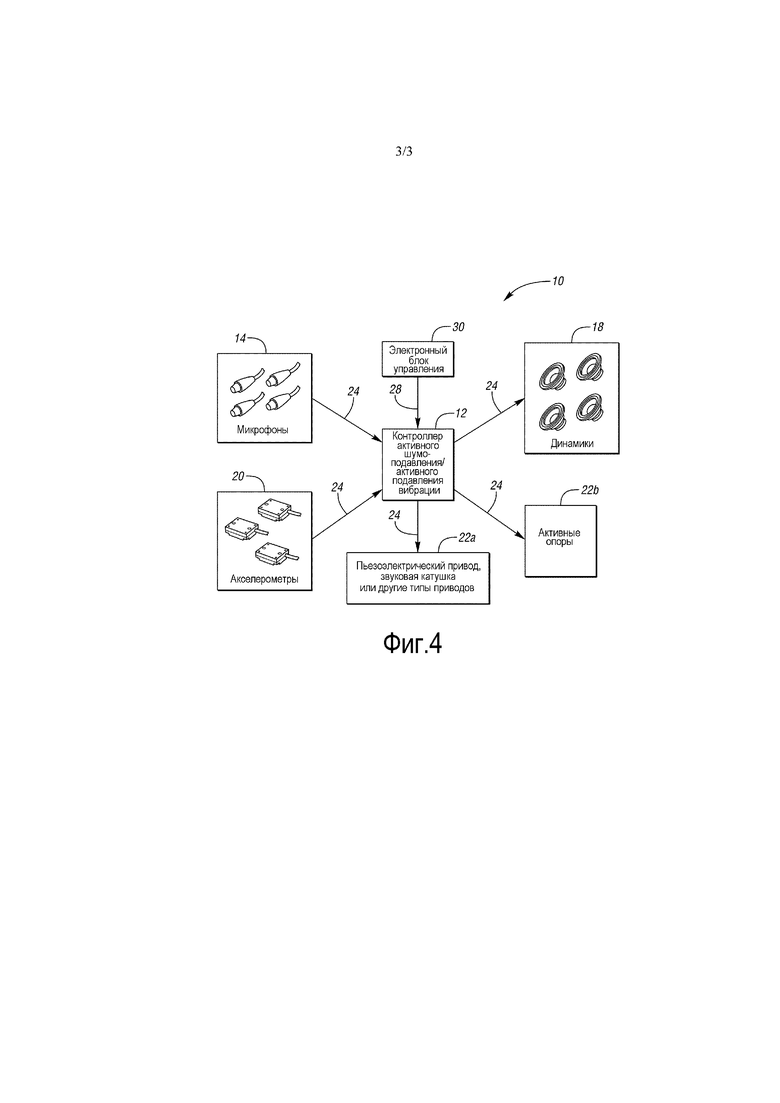
[0036] На Фигуре 3, с постоянной ссылкой на Фигуры 1, 2 и 4, показана блок-схема блоков системы 10 управления, взаимосвязанных через цифровую сеть 24. В варианте выполнения, показанном на Фигуре 3, цифровая сеть 24 представляет собой сеть Automotive Audio Bus (A2B)™ (товарный знак ANALOG DEVICES, INC. of Norwood, MA). Цифровая сеть 24 включает в себя одиночную неэкранированную витую пару 32, узел 34 ведущего приемопередатчика и узлы 36 ведомых приемопередатчиков. Узлы 36 ведомых приемопередатчиков последовательно соединены витой парой 32 с узлом 34 ведущего приемопередатчика так, как проиллюстрировано на Фигуре 3.
[0037] Контроллер 12 (т.е. хост-контроллер цифровой обработки сигналов (DSP)) соединен с узлом 34 ведущего приемопередатчика. Блоки аудио подсистемы и вибрационной подсистемы системы 10 управления индивидуально соединены с соответственными из узлов 36 ведомых приемопередатчиков. Например, микрофон 14 соединен с первым узлом 36a ведомого приемопередатчика, динамик 18 соединен со вторым узлом 36b ведомого приемопередатчика, и датчик 20 вибраций соединен с третьим узлом 36c ведомого приемопередатчика. В связи с этим блоки аудио подсистемы и вибрационной подсистемы представляют собой цифровые блоки, выполненные с возможностью связи по цифровой сети 24.
[0038] Цифровая сеть 24, выполненная в виде сети (A2B)™, обеспечивает двунаправленный, многоканальный интерфейс 38 I2S/TDM (Integrated Interchip Sound/Time Division Multiplexing) на расстояниях до десяти метров между узлами 34 и 36 приемопередатчиков. Цифровая сеть 24 внедряет двунаправленные синхронные данные (цифровые аудиоданные и цифровые данные по вибрации), тактовый сигнал и сигналы синхронизации на одиночную дифференциальную витую пару 32 (до сорока метров общей длины). Цифровая сеть 24 обеспечивает прямое соединение от точки к точке и позволяет множественные последовательно соединенные узлы в различных местах, чтобы предоставлять или потреблять содержимое канала с временным мультиплексированием. Узел 34 ведущего приемопередатчика производит тактовый сигнал, синхронизацию и фазирование для узлов 36 ведомых приемопередатчиков. Узел 34 ведущего приемопередатчика является программируемым с помощью контроллера 12 по шине 40 управления (I2C) для настройки и эхосчитывания. Расширение шины 40 (I2C) управления внедряется в поток данных, обеспечивая прямой доступ регистров и информацию о состоянии узлов 36 ведомых приемопередатчиков, а также связь I2C-I2C на расстоянии.
[0039] Как описано и как проиллюстрировано на Фигуре 3, цифровая сеть 24 характеризуется наличием узлов 34 и 36 приемопередатчиков, индивидуально соединенных вместе через витую пару 32. Контроллер 12 связывается напрямую с узлом 34 ведущего приемопередатчика, и блоки аудио и вибрационных подсистем системы 10 управления связываются напрямую с соответственными из узлов 36 ведомых приемопередатчиков. Контроллер 12 связывается с узлом 34 ведущего приемопередатчика через интерфейс 38 I2S/TDM, шину 40 I2C и шину 42 запроса на прерывание (IRQ). Блоки аудио и вибрационных подсистем системы 10 управления связываются с их соответствующими узлами 36 ведомых приемопередатчиков через интерфейс 38 I2S/TDM, шину 40 I2C и универсальную шину 44 ввода/вывода.
[0040] На Фигурах 1, 2, 3 и 4, как описано, система 10 управления обеспечивает централизованное управление ANC/AVC через цифровую сеть 24. Централизованное шумоподавление включает в себя подавление шума, связанного с двигателем, оптимизация звука и подавление широкополосного шума силового агрегата, дороги и шума ветра. Централизованное подавление вибрации включает в себя уменьшение вибрации силового агрегата. В связи с этим система 10 управления обеспечивает решение интегрированной общей системы активного контроля шума, вибрации и жесткости (NVH).
[0041] Система 10 управления включает в себя контроллер 12, блоки аудио подсистемы, включающие в себя микрофон 14 и динамик 18, и блоки вибрационной подсистемы, включающие в себя датчик 20 вибраций и вибрационный привод 22, все из которых взаимосвязаны через цифровую сеть 24. Цифровая сеть 24 способна к распределение аудио- и управляющих данных вместе с тактовым сигналом и питанием одиночной витой пары 32. Цифровая сеть 24 обеспечивает относительно простое проводное решение, которое не применяет множество жгутов проводов/соединителей для соединения блоков системы 10 управления вместе.
[0042] Контроллер 12 представляет собой интегрированный контроллер ANC/AVC, который может быть отдельным модулем или DSP/микрочипом, находящимся в других модулях управления. Контроллер 12 включает в себя и алгоритмы узкополосного и широкополосного управления силовым агрегатом и алгоритмы подавления вибрации (например, FxLMS и безынерционный субполосовой алгоритм с переменной шириной полосы частот для системы активного подавления широкополосного шума). Это управление также включает в себя алгоритм оптимизации звука двигателя и диагностическую функцию. Контроллер 12 принимает передаваемые данные CAN (частоту вращения двигателя, крутящий момент двигателя, скорость транспортного средства и т.д.) и опорные сигналы от микрофона 14 и датчика 20 вибраций через цифровую сеть 24.
[0043] Контроллер 12 посылает сигналы подавления шума AHU 16 для смешивания с музыкой для приведения в действие динамика 18 через цифровую сеть 24. В связи с этим микрофон 14 используется для сигнала обратной связи для активного шумоподавления, и динамик 18 используется как привод для активного подавления шума.
[0044] Контроллер 12 посылает сигналы подавления вибрации вибрационному приводу 22 для подавления вибрации. Датчик 20 вибраций может быть акселерометром для подавления вибрации или подавления широкополосного шума. Датчик 20 вибраций может быть существующим датчиком силового агрегата или шасси, таким как датчик детонации датчика антиблокировочной системы тормозов (ABS). Вибрационный привод 22 может быть активной опорой или активным вибратором в зависимости от требования решения.
[0045] В итоге, контроллер 12 принимает входные данные микрофона/датчика и управляет множеством активных устройств, таких как внутренние динамики, внешние динамики ANC (система впуска воздуха (AIS)/выпуск), ACM, активные вибрационные приводы, линейные двигатели и т.д. Контроллер 12 применяет целостный подход для управления опорными сигналами от множества микрофонов/датчиков и для индивидуальной оптимизации приводов. Контроллер 12 использует информацию от шины CAN, чтобы объединять существующие датчики двигателя и рабочее состояние для дополнительных входных данных управления с упреждением. В связи с этим система 10 управления представляет собой оптимальную и недорогую систему управления ANC/AVC для управления и интегрирования различных систем активного управления для достижения требуемого преимущества NVH.
[0046] Хотя примерные варианты выполнения описаны выше, не должно предполагаться, что эти варианты выполнения описывают все возможные формы настоящего изобретения. Точнее, признаки, используемые в описании не являются ограничивающими, и понятно, что различные изменения могут быть выполнены без отклонения от замысла и объема охраны настоящего изобретения. Дополнительно, признаки различных вариантов выполнения могут быть объединены для образования дополнительных вариантов выполнения настоящего изобретения.
Изобретение относится к электрооборудованию автомобилей. Система активного шумоподавления и активного подавления вибрации, содержит контроллер; аудио подсистему с микрофоном для обнаружения шума и динамик для вывода шумоподавляющего звука. Также имеется вибрационная подсистема, включающая в себя датчик вибраций и вибрационный привод для создания сил. Контроллер осуществляет связь и управление через цифровую сеть аудио подсистемой и вибрационной подсистемой. Контроллер дополнительно управляет через цифровую сеть, на основе шума, обнаруживаемого микрофоном, динамиком для вывода шумоподавляющего звука и вибрационным приводом для создания силы, вызывающей создание шумоподавляющего звука. Контроллер осуществляет связь с электронным блоком управления через шину CAN так, что контроллер создает опорный сигнал, пропорциональный частоте циклов вращения двигателя. Подавляется шум и вибрация. 3 н. и 14 з.п. ф-лы, 4 ил.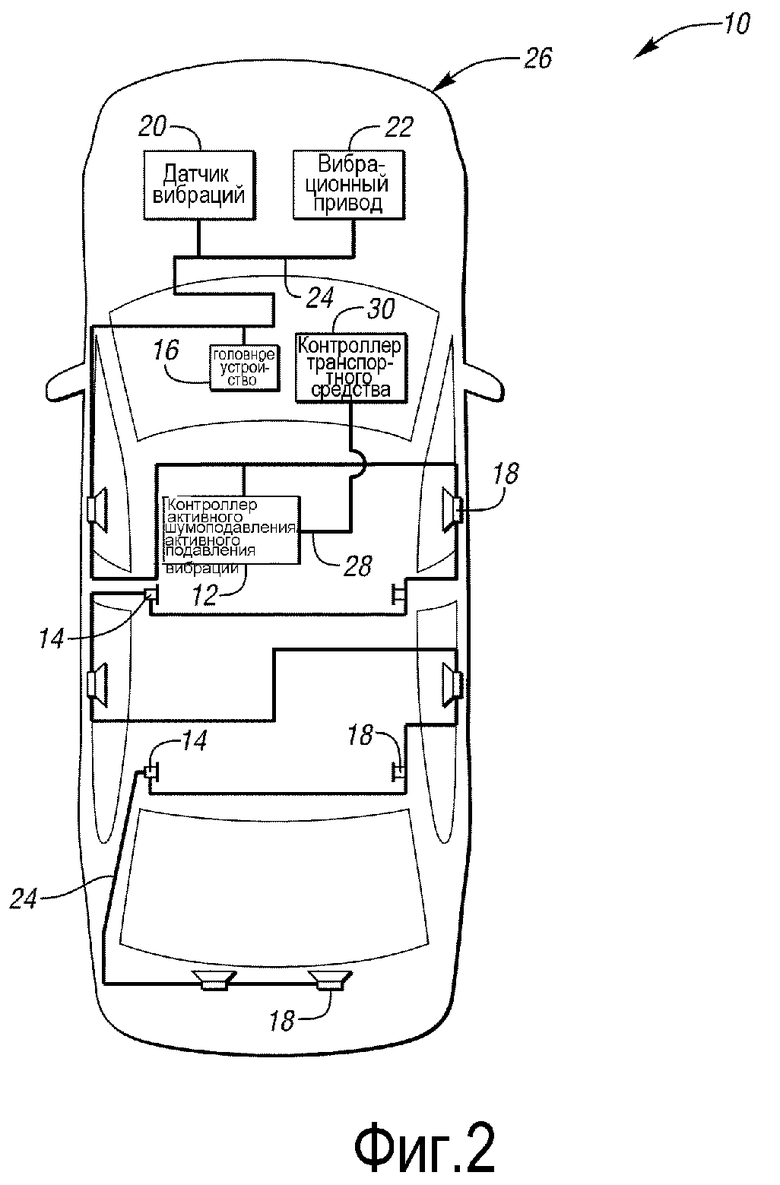
1. Система активного шумоподавления (ANC) и активного подавления вибрации (AVC), содержащая:
контроллер;
аудио подсистему, включающую в себя микрофон для обнаружения шума и динамик для вывода шумоподавляющего звука;
вибрационную подсистему, включающую в себя датчик вибраций для обнаружения вибраций и вибрационный привод для создания сил;
цифровую сеть, взаимосвязывающую контроллер и подсистемы;
причем контроллер, микрофон, динамик, датчик вибраций и вибрационный привод индивидуально соединены с цифровой сетью в последовательном расположении для связи друг с другом; и
причем контроллер выполнен с возможностью осуществлять связь и управление через цифровую сеть аудио подсистемой, включающей в себя микрофон и динамик, и вибрационной подсистемой, включающей в себя датчик вибраций и вибрационный привод, для выполнения функций активного шумоподавления (ANC) и активного подавления вибрации (AVC), и причем контроллер дополнительно выполнен с возможностью управлять через цифровую сеть, на основе шума, обнаруживаемого микрофоном, динамиком для вывода шумоподавляющего звука и вибрационным приводом для создания силы, вызывающей создание шумоподавляющего звука;
причем контроллер осуществляет связь с электронным блоком управления через шину CAN, так что контроллер создает опорный сигнал, пропорциональный частоте циклов вращения двигателя.
2. Система по п. 1, в которой: контроллер дополнительно выполнен с возможностью через цифровую сеть управлять динамиком для вывода шумоподавляющего звука, соответствующего шуму, обнаруживаемому микрофоном, для того чтобы подавлять шум.
3. Система по п. 1, в которой: контроллер дополнительно выполнен с возможностью через цифровую сеть управлять вибрационным приводом для создания силы подавления, соответствующей силе вибрации, обнаруживаемой датчиком вибраций, для того чтобы подавлять вибрацию, обнаруживаемую датчиком вибраций.
4. Система по п. 1, в которой: цифровая сеть представляет собой одиночный контур, витую пару, выполненную с возможностью распределения аудио- и управляющих данных вместе с тактовым сигналом и питанием.
5. Система по п. 1, в которой: контроллер дополнительно выполнен с возможностью через цифровую сеть управлять, основываясь на шуме, обнаруживаемом микрофоном, динамиком для вывода шумоподавляющего звука и вибрационным приводом для создания силы, вызывающей создание шумоподавляющего звука.
6. Система по п. 1, в которой: аудио подсистема дополнительно включает в себя дополнительные динамики, каждый из которых выполнен с возможностью вывода шумоподавляющего звука, причем дополнительные динамики соединены с цифровой сетью в последовательном расположении; и
контроллер дополнительно выполнен с возможностью через цифровую сеть управлять подмножеством из более чем одного из всех динамиков для вывода шумоподавляющих звуков на основе шума, обнаруживаемого микрофоном.
7. Система по п. 6, в которой: вибрационная подсистема дополнительно включает в себя дополнительные вибрационные приводы, каждый из которых выполнен с возможностью создания сил, причем дополнительные вибрационные приводы соединены с цифровой сетью в последовательном расположении; и
контроллер дополнительно выполнен с возможностью через цифровую сеть управлять, основываясь на шуме, обнаруживаемом микрофоном, подмножеством из более чем одного из всех динамиков для вывода шумоподавляющих звуков и подмножеством из более чем одного из всех вибрационных приводов для создания сил, вызывающих создание шумоподавляющих звуков.
8. Система по п. 1, в которой: контроллер дополнительно выполнен с возможностью через цифровую сеть управлять, основываясь на вибрациях, обнаруживаемых датчиком вибраций, вибрационным приводом для создания сил подавления и динамиком для вывода шумоподавляющего звука.
9. Система по п. 1, в которой: вибрационная подсистема дополнительно включает в себя дополнительные вибрационные приводы, каждый из которых выполнен с возможностью создания сил, причем дополнительные вибрационные приводы соединены с цифровой сетью в последовательном расположении; и
контроллер дополнительно выполнен с возможностью через цифровую сеть управлять подмножеством из более чем одного из всех вибрационных приводов для создания сил подавления на основе сил вибраций, обнаруживаемых датчиком вибраций.
10. Система по п. 9, в которой: аудио подсистема дополнительно включает в себя дополнительные динамики, каждый из которых выполнен с возможностью вывода шумоподавляющего звука, причем дополнительные динамики соединены с цифровой сетью в последовательном расположении; и
контроллер дополнительно выполнен с возможностью через цифровую сеть управлять, основываясь на вибрациях, обнаруживаемых датчиком вибраций, подмножеством из более чем одного из всех вибрационных приводов для создания сил подавления и подмножеством динамиков для вывода шумоподавляющих звуков.
11. Система по п. 1, в которой: аудио подсистема дополнительно включает в себя внутренние динамики для вывода шумоподавляющих звуков для противодействия шуму в кабине, динамик системы впуска воздуха для вывода шумоподавляющего звука для противодействия шуму отверстия системы впуска воздуха и динамик выпускной системы для вывода шумоподавляющего звука для противодействия шуму отверстия выхлопной трубы выпускной системы, причем внутренние динамики, динамик впуска воздуха и динамик выпускной системы соединены с цифровой сетью в последовательном расположении;
вибрационная подсистема дополнительно включает в себя дополнительные вибрационные приводы для создания сил, причем дополнительные вибрационные приводы соединены с цифровой сетью в последовательном расположении; и
причем контроллер дополнительно выполнен с возможностью через цифровую сеть управлять динамиками и вибрационными приводами в совокупности для функций ANC системы впуска воздуха и выпускной системы.
12. Транспортное средство, содержащее: контроллер; аудио подсистему, включающую в себя микрофон для обнаружения шума и динамик для вывода шумоподавляющего звука;
вибрационную подсистему, включающую в себя датчик вибраций для обнаружения вибраций и вибрационный привод для создания сил;
цифровую сеть;
причем контроллер, микрофон, динамик, датчик вибраций и вибрационный привод индивидуально соединены с цифровой сетью в последовательном расположении для связи друг с другом; и
причем контроллер выполнен с возможностью осуществлять связь и управление через цифровую сеть аудио подсистемой, включающей в себя микрофон и динамик, и вибрационной подсистемой, включающей в себя датчик вибраций и вибрационный привод, для выполнения функций активного шумоподавления (ANC) и активного подавления вибрации (AVC) для данного транспортного средства, и причем контроллер дополнительно выполнен с возможностью управлять через цифровую сеть, на основе шума, обнаруживаемого микрофоном, динамиком для вывода шумоподавляющего звука и вибрационным приводом для создания силы, вызывающей создание шумоподавляющего звука;
причем контроллер осуществляет связь с электронным блоком управления через шину CAN, так что контроллер создает опорный сигнал, пропорциональный частоте циклов вращения двигателя.
13. Транспортное средство по п. 12, дополнительно содержащее:
блок управления силовым агрегатом;
причем контроллер соединен через шину CAN c блоком управления силовым агрегатом для приема связанной с транспортным средством информации для использования контроллером при выполнении функций ANC и AVC.
14. Транспортное средство по п. 13, в котором: контроллер дополнительно выполнен с возможностью через цифровую сеть управлять, основываясь на шуме, обнаруживаемом микрофоном, динамиком для вывода шумоподавляющего звука и вибрационным приводом для создания производящих шум сил, вызывающих создание шумоподавляющего звука.
15. Транспортное средство по п. 13, в котором: контроллер дополнительно выполнен с возможностью через цифровую сеть управлять вибрационным приводом для создания сил подавления вибраций и динамиком для вывода шумоподавляющего звука на основе вибраций, обнаруживаемых датчиком вибраций.
16. Транспортное средство по п. 12, в котором: аудио подсистема дополнительно включает в себя внутренние динамики для вывода шумоподавляющих звуков для противодействия шуму в кабине, динамик системы впуска воздуха для вывода шумоподавляющего звука для противодействия шуму отверстия системы впуска воздуха и динамик выпускной системы для вывода шумоподавляющего звука для противодействия шуму отверстия выхлопной трубы выпускной системы, причем внутренние динамики, динамик впуска воздуха и динамик выпускной системы соединены с цифровой сетью в последовательном расположении;
вибрационная подсистема дополнительно включает в себя дополнительные вибрационные приводы для создания сил, причем дополнительные вибрационные приводы соединены с цифровой сетью в последовательном расположении; и
в котором контроллер дополнительно выполнен с возможностью через цифровую сеть управлять динамиками и вибрационными приводами в совокупности для функций ANC системы впуска воздуха и выпускной системы.
17. Система активного шумоподавления (ANC) и активного подавления вибрации (AVC), содержащая:
цифровую сеть;
контроллер, микрофон, динамик и вибрационный привод, индивидуально соединенные с цифровой сетью в последовательном расположении; и
причем контроллер выполнен с возможностью управлять через цифровую сеть, на основе шума, обнаруживаемого микрофоном, динамиком для вывода шумоподавляющего звука и вибрационным приводом для создания силы, вызывающей создание шумоподавляющего звука;
причем контроллер осуществляет связь с электронным блоком управления через шину CAN, так что контроллер создает опорный сигнал, пропорциональный частоте циклов вращения двигателя.
| US 5434783 A, 18.07.1995 | |||
| US 7231052 B2, 12.06.2007 | |||
| US 7876910 B2, 25.01.2011 | |||
| JP 7036468 A, 07.02.1995 | |||
| JP 2006213297 A, 17.08.2006 | |||
| СИСТЕМА АКТИВНОГО ШУМОПОДАВЛЕНИЯ И ЕЕ ПРИМЕНЕНИЕ | 2006 |
|
RU2411592C2 |
| СПОСОБ И УСТРОЙСТВО КОМПЛЕКСНОГО СНИЖЕНИЯ ШУМА ТРАНСПОРТНОГО СРЕДСТВА | 2003 |
|
RU2275520C2 |

