Изобретение относится к области радиотехники и может быть использовано для создания преднамеренных радиопомех большой мощности размещаемым на высокоскоростных и высокоманевренных мобильных средствах приемным устройствам навигационной аппаратуры потребителей (НАП), работающей по сигналам глобальных навигационных спутниковых систем (ГНСС), путем применения совокупности разнесенных в пространстве передатчиков радиопомех небольшой мощности с концентрацией суммарной энергии радиопомех в заданной области пространства на заданном интервале времени.
Известна сетецентрическая пространственно-распределенная система на основе малогабаритных модулей разведки и помех [Радзиевский В.Г. Сетецентрическая пространственно-разнесенная система на основе малогабаритных модулей разведки и помех [Текст] / Радиотехника. - 2012. - №6. - С. 4-11], состоящая из малогабаритных модулей разведки и помех, размещаемых в непосредственной близости от радиоэлектронных средств, часть из этих малогабаритных модулей разведки и помех имеют дополнительную функцию управления ограниченной совокупностью модулей разведки и помех и связи центром управления и обработки информации, ретранслятора передачи данных, разведывательных датчиков, размещенных для увеличения дальности действия на летно-подъемных средствах, центра обработки разведывательной информации, центра и управления и обработки данных пространственно-распределенной системы разведки и помех.
Недостатком сетецентрической пространственно-распределенной системы на основе малогабаритных модулей разведки и помех является то, что данная система не обеспечивает определения объектов радиоподавления НАП, работающей по сигналам ГНСС, размещаемых на высокоскоростных и высокоманевренных мобильных средствах.
Известен пространственно-распределенный комплекс средств создания радиопомех [Патент №2563972 РФ, МПК H04K 3/00. Пространственно-распределенный комплекс средств создания радиопомех / А.В. Журавлев [и др.] (РФ); ОАО НВП «ПРОТЕК» (РФ). - №2014111857/07; Заявлено 27.03.2014; Опубл. 27.09.2015. - 2 с.], состоящий из пункта управления, имеющего аппаратуру координатно-временного и навигационного обеспечения, блок электропитания, пульт управления, блок дисплея, передающую антенну, приемную антенну, радиостанцию канала управления, вычислитель, который выполняет функции определения прогнозируемой на заданный интервал времени области пространства местоположения объекта радиоподавления и управления совокупно разнесенными в пространстве станциями разведки, имеющими передающую антенну, приемную антенну, радиостанцию канала управления, блок электропитания, аппаратуру координатно-временного и навигационного обеспечения, аппаратуру обнаружения и определения местоположения объекта радиоподавления с антенной, вычислитель, формирующих и передающих по линиям внутриобъектовой связи кодограммы инициализации работы аппаратуры обнаружения и определения местоположения объекта радиоподавления, и совокупно разнесенными в пространстве станциями радиопомех, имеющими передающую антенну, приемную антенну, радиостанции канала управления, блок электропитания, аппаратуру координатно-временного и навигационного обеспечения, блок управления передатчиком радиопомех, передатчик радиопомех с антенной излучения радиопомех, устройство угловой ориентации антенны излучения радиопомех, блок управления угловым положением антенны излучения радиопомех, спецвычислитель, обеспечивающий угловую ориентацию главных лепестков диаграмм направленности антенн, излучающих радиопомехи, создающих в заданной области пространства местоположения объекта радиоподавления устройствам навигационной аппаратуры потребителей, работающей по сигналам глобальных навигационных спутниковых систем требуемого уровня суммарной мощности радиопомех с учетом оптимизации применяемого наряда разнесенных в пространстве станций радиопомех по их местоположению и количеству, а также временных регламентов работы станций радиопомех на излучение.
Недостатком данного комплекса является то, что в составе пространственно-распределенного комплекса средств создания радиопомех находятся совокупно разнесенные в пространстве станции разведки, являющиеся дополнительными излучающими дорогостоящими объектами, имеющими значительные габариты и массу, низкую разведзащищенность и живучесть аппаратуры активной однопозиционной или бистатической радиолокации.
Целью изобретения является разработка пространственно-распределенного комплекса создания радиопомех навигационной аппаратуре потребителей глобальных навигационных систем с многофункциональным использованием радиоэлектронного оборудования, обеспечивающего проведения радиоразведки и радиоподавления.
Поставленная цель достигается тем, что в известный пространственно-распределенный комплекс средств создания радиопомех, в пункт управления дополнительно введены приемоизмеритель, предназначенный для определения координат носителя соответствующей составной части комплекса, активная антенна, модуль фильтров помеховых сигналов, модуль фильтров зондирующих сигналов, модуль измерения зондирующих сигналов, блок определения собственных координат, при этом активная антенна соединена с входом модуля фильтров помеховых сигналов, выход которых соединен с входом модуля фильтров зондирующих сигналов, соединенным с соответствующим входом модуля измерения зондирующих сигналов, кроме того, вторые входы модуля фильтров помеховых сигналов, модуля фильтров зондирующих сигналов и модуля измерения зондирующих сигналов соединены с выходом блока определения соответствующих координат, который взаимосвязан с приемоизмерителем и вычислителем пункта управления, причем выход модуля фильтров зондирующих сигналов соединен с соответствующим входом приемоизмерителя, в каждую из N станций радиопомех дополнительно введены приемоизмеритель, предназначенный для определения координат носителя соответствующей частоты комплекса, активная антенна, модуль фильтров помеховых сигналов, модуль фильтров зондирующих сигналов, модуль измерения зондирующих сигналов, блок формирования зондирующих сигналов, при этом активная антенна соединена с входом модуля фильтров помеховых сигналов, выход которого соединен с входом модуля фильтров зондирующих сигналов, соединенным с соответствующим входом модуля измерения зондирующих сигналов, кроме того, вторые входы модуля фильтров помеховых сигналов, модуля фильтров зондирующих сигналов и модуля измерения зондирующих сигналов соединены с входом блока определения собственных координат, который взаимосвязан с приемоизмерителем и вычислителем станции радиопомех, причем вход модуля фильтров зондирующих сигналов соединен с соответствующим входом приемоизмерителя станции радиопомех, блок формирования зондирующего сигнала взаимосвязан с вычислителем станции радиопомех.
Сущность изобретения поясняется фигурами.
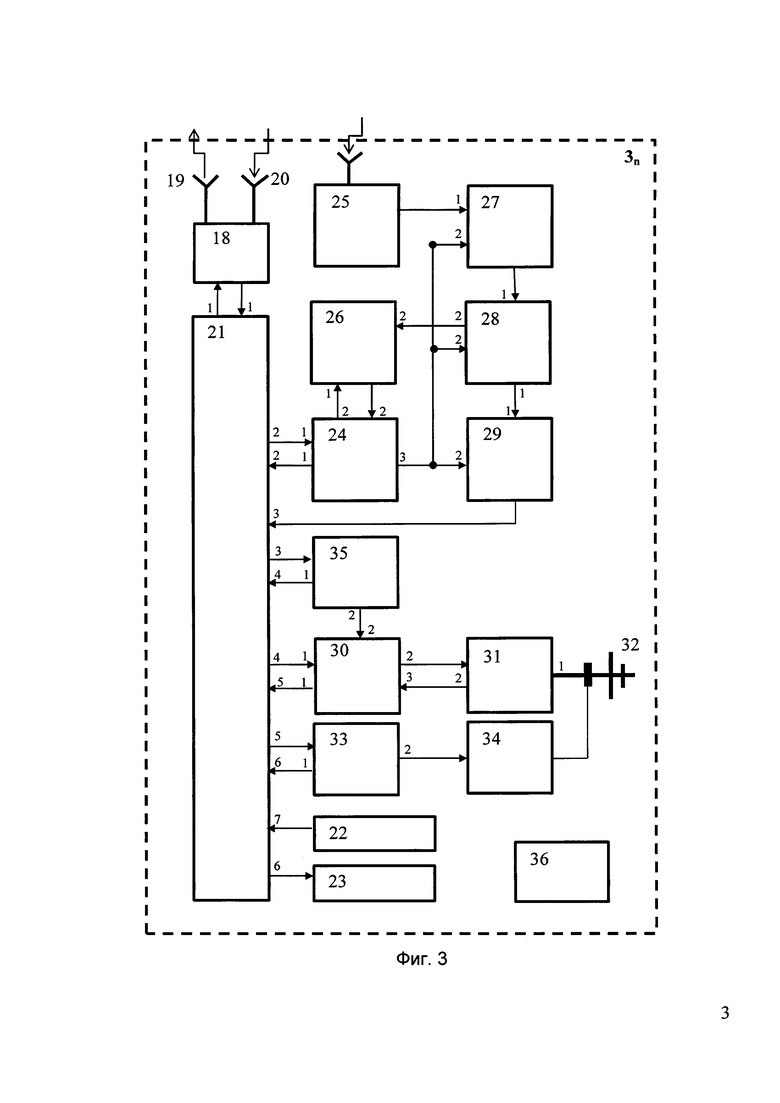
На фиг. 1 показана гипотетическая схема расположения пространственно-распределенного комплекса создания радиопомех навигационной аппаратуре потребителей глобальных навигационных систем с многофункциональным использованием радиоэлектронного оборудования, на фиг. 2 показана структурно-функциональная схема комплекта радиоэлектронного оборудования пункта управления и на фиг. 3 показана структурно-функциональная схема комплекта радиоэлектронного оборудования и станции радиопомех.
Пространственно-распределенный комплекс создания радиопомех навигационной аппаратуре потребителей глобальных навигационных систем с многофункциональным использованием радиоэлектронного оборудования, далее по тексту КОМПЛЕКС, состоит из пункта управления 4 и станций радиопомех 31, 32, …, 3n, …, 3N (или 3n,  ), где n - порядковый номер, а N - количество станций радиопомех в КОМПЛЕКСЕ.
), где n - порядковый номер, а N - количество станций радиопомех в КОМПЛЕКСЕ.
Пункт управления 4 состоит из радиостанции 5 с предающей антенной 6 и приемной антенной 7, вычислителя 8 с пультом управления 9 и дисплеем 10, блока определения собственных координат 11, активной антенны 12, приемоизмерителя 13, модуля фильтров помеховых сигналов 14, модуля фильтров зондирующих сигналов 15, модуля измерения зондирующих сигналов 16, блока питания 17.
Станция радиопомех 3n,  состоит из радиостанции 18 с предающей антенной 19 и приемной антенной 20, вычислителя 21 с пультом управления 22 и дисплеем 23, блока определения собственных координат 24, активной антенны 25, приемоизмерителя 26, модуля фильтров помеховых сигналов 27, модуля фильтров зондирующих сигналов 28, модуля измерения зондирующих сигналов 29, блока управления передатчиком 30, передатчика радиопомех 31, передающей антенны 32, блока управления передающей антенны 33, устройства ориентирования передающей антенны 34, блока синтезатора зондирующего сигнала 35, блока питания 36.
состоит из радиостанции 18 с предающей антенной 19 и приемной антенной 20, вычислителя 21 с пультом управления 22 и дисплеем 23, блока определения собственных координат 24, активной антенны 25, приемоизмерителя 26, модуля фильтров помеховых сигналов 27, модуля фильтров зондирующих сигналов 28, модуля измерения зондирующих сигналов 29, блока управления передатчиком 30, передатчика радиопомех 31, передающей антенны 32, блока управления передающей антенны 33, устройства ориентирования передающей антенны 34, блока синтезатора зондирующего сигнала 35, блока питания 36.
Аппаратура в пункте управления 4 имеет следующие соединения. Вычислитель 8 первым выходом соединен с входом радиостанции 5, вторым выход соединен с первым входом блока определения собственных координат 11, третьим выходом с дисплеем 10. Выход радиостанции 5 соединен с первым входом вычислителя 8. Выход пульта управления 9 соединен с четвертым входом вычислителя 8. Блок определения собственных координат 11 первым выходом соединен со вторым входом вычислителя 8, вторым выходом с первым входом приемоизмерителя 13, третьим выходом со вторым входом модуля измерения зондирующих сигналов 16, со вторым входом модуля фильтров зондирующего сигнала 15, со вторым входом модуля фильтров помехового сигнала 14. Выход приемоизмерителя 13 соединен со вторым входом блока определения собственных координат 11. Выход активной антенны 12 соединен с первым входом модуля фильтров помехового сигнала 14. Выход модуля фильтров помехового сигнала 14 соединен с первым входом модуля фильтров зондирующего сигнала 15. Второй выход модуля фильтров зондирующего сигнала 15 соединен со вторым входом приемоизмерителя 13, первый выход соединен с первым входом модуля измерения зондирующих сигналов 16, выход которого соединен с третьим входом вычислителя 8.
Аппаратура станции радиопомех 3n,  имеет следующие соединения. Вычислитель 21 первым выходом соединен с входом радиостанции 18, вторым выходом соединен с первым входом блока определения собственных координат 24, третьим выходом соединен с входом блока формирования зондирующего сигнала 35, четвертым выходом с первым входом блока управления радиопередатчика 30, пятым выходом соединен со входом с блоком управления передающей антенны 33, шестым входом с дисплеем 23. Выход радиостанции 18 соединен с первым входом вычислителя 21. Выход пульта управления 22 соединен с седьмым входом вычислителя 21. Блок определения собственных координат 24 первым выходом соединен со вторым входом вычислителя 21, вторым выходом с первым входом приемоизмерителя 26, третьим выходом со вторым входом модуля измерения зондирующих сигналов 29, со вторым входом модуля фильтров зондирующего сигнала 28, со вторым входом модуля фильтров помехового сигнала 27. Выход приемоизмерителя 26 соединен со вторым входом блока определения собственных координат 24. Выход активной антенны 25 соединен с первым входом модуля фильтров помехового сигнала 27. Выход модуля фильтров помехового сигнала 27 соединен с первым входом модуля фильтров зондирующего сигнала 28. Второй выход модуля фильтров зондирующего сигнала 28 соединен со вторым входом приемоизмерителя 26, первый выход соединен с первым входом модуля измерения зондирующих сигналов 29, выход которого соединен с третьим входом вычислителя 21.
имеет следующие соединения. Вычислитель 21 первым выходом соединен с входом радиостанции 18, вторым выходом соединен с первым входом блока определения собственных координат 24, третьим выходом соединен с входом блока формирования зондирующего сигнала 35, четвертым выходом с первым входом блока управления радиопередатчика 30, пятым выходом соединен со входом с блоком управления передающей антенны 33, шестым входом с дисплеем 23. Выход радиостанции 18 соединен с первым входом вычислителя 21. Выход пульта управления 22 соединен с седьмым входом вычислителя 21. Блок определения собственных координат 24 первым выходом соединен со вторым входом вычислителя 21, вторым выходом с первым входом приемоизмерителя 26, третьим выходом со вторым входом модуля измерения зондирующих сигналов 29, со вторым входом модуля фильтров зондирующего сигнала 28, со вторым входом модуля фильтров помехового сигнала 27. Выход приемоизмерителя 26 соединен со вторым входом блока определения собственных координат 24. Выход активной антенны 25 соединен с первым входом модуля фильтров помехового сигнала 27. Выход модуля фильтров помехового сигнала 27 соединен с первым входом модуля фильтров зондирующего сигнала 28. Второй выход модуля фильтров зондирующего сигнала 28 соединен со вторым входом приемоизмерителя 26, первый выход соединен с первым входом модуля измерения зондирующих сигналов 29, выход которого соединен с третьим входом вычислителя 21.
Первый выход блока формирования зондирующего сигнала 35 соединен с четвертым входом вычислителя 21, второй выход соединен со вторым входом блока управления передатчиком 30. Первый выход блока управления передатчиком 30 соединен с пятым входом вычислителя 21, второй выход соединен с входом передатчика радиопомех 31. Первый выход передатчика радиопомех 31, второй выход соединен с третьим входом блока управления передатчиком 30. Первый выход блока передающей антенны 33 соединен с шестым входом вычислителя 21, второй выход соединен с устройством ориентирования передающей антенны 34.
Вычислитель 8 с пультом управления 9 и дисплеем 10 пункта управления 4, спецвычислитель 21 с пультом управления 22 и дисплеем 23, станции радиопомех 3n,  являются оборудованием автоматизации управления, решающим комплекс задач организации взаимодействия данными между составными частями КОМПЛЕКСА.
являются оборудованием автоматизации управления, решающим комплекс задач организации взаимодействия данными между составными частями КОМПЛЕКСА.
Радиостанция 5 с передающей антенной 6 и приемной антенной 7 пункта управления 4, радиостанция 18 с передающей антенной 19 и приемной антенной 20, станции радиопомех 3n,  являются помехозащищенным оборудованием, обеспечивающим внутрикомплексный информационный обмен цифровой информации по согласованному протоколу на требуемых дистанциях связи, определяемых позициями составных частей КОМПЛЕКСА.
являются помехозащищенным оборудованием, обеспечивающим внутрикомплексный информационный обмен цифровой информации по согласованному протоколу на требуемых дистанциях связи, определяемых позициями составных частей КОМПЛЕКСА.
Блок определения собственных координат 11, активная антенна 12, приемоизмеритель 13, модуль фильтров помеховых сигналов 14, модуль фильтров зондирующих сигналов 15, модуль измерения зондирующих сигналов 16 пункта управления 4, блок определения собственных координат 24, активная антенна 25, приемоизмеритель 26, модуль фильтров помеховых сигналов 27, модуль фильтров зондирующих сигналов 28, модуль измерения зондирующих сигналов 29, станции радиопомех 3n,  являются оборудованием координатно-временного и навигационного обеспечения мобильного средства-носителя составной части КОМПЛЕКСА путем определения координат данного мобильного средства и приемной позиции активной многопозиционной радиолокационной системы, путем определения значений временных и частотных параметров прямого и отраженного зондирующих сигналов SИЗ и SОЗ с привязкой к шкале единого времени с использованием данных координатно-временного обеспечения.
являются оборудованием координатно-временного и навигационного обеспечения мобильного средства-носителя составной части КОМПЛЕКСА путем определения координат данного мобильного средства и приемной позиции активной многопозиционной радиолокационной системы, путем определения значений временных и частотных параметров прямого и отраженного зондирующих сигналов SИЗ и SОЗ с привязкой к шкале единого времени с использованием данных координатно-временного обеспечения.
Передатчик радиопомех 31, передающая антенна 32, блок управления передающей антенны 33, устройства ориентирования передающей антенны 34, блока синтезатора зондирующего сигнала 35, станции радиопомех 3n,  являются оборудованием формирования, усиления преднамеренных или зондирующих радиосигналов путем поставки радиопомех или излучения зондирующего радиосигнала в момент реализации способа активной многопозиционной радиолокации.
являются оборудованием формирования, усиления преднамеренных или зондирующих радиосигналов путем поставки радиопомех или излучения зондирующего радиосигнала в момент реализации способа активной многопозиционной радиолокации.
Блок питания 17 пункта управления 4 и блок питания 36 станции радиопомех 3n,  , оборудование электроснабжения и электропитания, предназначенное для электрообеспечения составных частей КОМПЛЕКСА.
, оборудование электроснабжения и электропитания, предназначенное для электрообеспечения составных частей КОМПЛЕКСА.
Пространственно-распределенный комплекс создания радиопомех навигационной аппаратуре потребителей глобальных навигационных систем с многофункциональным использованием радиоэлектронного оборудования работает следующим образом. Составные части КОМПЛЕКСА, пункт управления 4 и станции радиопомех 3n,  после совершения марша из района сосредоточения или выполнения маневра по смене местоположения находятся в заданных позиционных районах в готовности к функционированию по назначению. Блок питания 17 пункта управления 4 и блок питания 36 станции радиопомех 3n,
после совершения марша из района сосредоточения или выполнения маневра по смене местоположения находятся в заданных позиционных районах в готовности к функционированию по назначению. Блок питания 17 пункта управления 4 и блок питания 36 станции радиопомех 3n,  обеспечивают электропитанием все оборудование составных частей КОМПЛЕКСА.
обеспечивают электропитанием все оборудование составных частей КОМПЛЕКСА.
Операторы пункта управления 4 и станции радиопомех 3n,  с пульта управления 9 и 22 вводят в вычислитель 8 и 21 команду на проведение инициализации. Вычислитель 8 и 21, получив команду на проведение инициализации, осуществляет процедуру проверки работоспособности оборудования и определения местоположении составных частей КОМПЛЕКСА. Полученный результат инициализации вычислитель 8 и 21 выводит на дисплей 10 и 23.
с пульта управления 9 и 22 вводят в вычислитель 8 и 21 команду на проведение инициализации. Вычислитель 8 и 21, получив команду на проведение инициализации, осуществляет процедуру проверки работоспособности оборудования и определения местоположении составных частей КОМПЛЕКСА. Полученный результат инициализации вычислитель 8 и 21 выводит на дисплей 10 и 23.
Вычислитель 21 станции радиопомех 3n,  полученный результат инициализации и полученные от блока определения собственных координат 24 автономные координаты местоположения передает через радиостанцию 18, передающую антенну 19, приемную антенну 7, радиостанцию 5 на вычислитель 8, который, в свою очередь, формирует массив данных о пространственных координатах и техническом состоянии станций радиопомех 3n,
полученный результат инициализации и полученные от блока определения собственных координат 24 автономные координаты местоположения передает через радиостанцию 18, передающую антенну 19, приемную антенну 7, радиостанцию 5 на вычислитель 8, который, в свою очередь, формирует массив данных о пространственных координатах и техническом состоянии станций радиопомех 3n,  , выводит информацию на дисплей 10 для визуализации в графическом и текстовом форматах. При неполучении вычислителем 8 результата инициализации в течение заданного интервала времени интерпретируется как факт технической неисправности (неработоспособности) станции помех 3n.
, выводит информацию на дисплей 10 для визуализации в графическом и текстовом форматах. При неполучении вычислителем 8 результата инициализации в течение заданного интервала времени интерпретируется как факт технической неисправности (неработоспособности) станции помех 3n.
Оператор пункта управления с учетом полученных данных о пространственных координатах и техническом состоянии согласно предписаниям плана применения КОМПЛЕКСА или внеочередному указанию вышестоящего органа управления вводит с пульта управления 9 в вычислитель 8 команду инициализации процедуры сбора данных для определения пространственных координат, параметров траектории движения мобильного средства-носителя объекта радиоподавления 2m определения пространственных координат Qi области пространства 1m прогнозируемого на заданный интервал времени (tHi, tKi) местоположения объекта радиоподавления 2m, а также формирования наряда станций радиопомех  .
.
Вычислитель 8, приняв команду, формирует план-график  работы станций радиопомех 3n,
работы станций радиопомех 3n,  в режиме излучения зондирующего сигнала для реализации способа активной многопозиционной радиолокации. План-график DИЗС регламентирует последовательность интервалов времени (абсолютных значений моментов времени начала и окончания) работы в общем случае каждой из станций радиопомех 3n,
в режиме излучения зондирующего сигнала для реализации способа активной многопозиционной радиолокации. План-график DИЗС регламентирует последовательность интервалов времени (абсолютных значений моментов времени начала и окончания) работы в общем случае каждой из станций радиопомех 3n,  на излучение зондирующего сигнала в заданном для каждого интервала времени пространственном направлении, характеризуемом углами ориентациями передающей антенны 32 в азимутальной и угломестной плоскостях для обеспечения максимальной эффективности использования ограниченного энергопотенциала станции радиопомех 3n.
на излучение зондирующего сигнала в заданном для каждого интервала времени пространственном направлении, характеризуемом углами ориентациями передающей антенны 32 в азимутальной и угломестной плоскостях для обеспечения максимальной эффективности использования ограниченного энергопотенциала станции радиопомех 3n.
На следующем шаге вычислитель 8 формирует кодограммы запроса данных о привязанных к шкале единого времени значениях временных и частотных параметров, принятых блоком определения собственных координат 24, активной антенной 25, приемоизмерителем 26, модулем фильтров помеховых сигналов 27, модулем фильтров зондирующих сигналов 28, модулем измерения зондирующих сигналов 29 зондирующих сигналов  , характеризующих пространственные координаты и параметры траектории движения мобильного средства-носителя объекта радиоподавления 2m, которые вместе с план-графиком DИЗС в соответствии с протоколом внутрикомплексного информационного обмена передает через радиостанцию 5 и передающую антенну 6 в адрес работоспособных станций радиопомех 3n,
, характеризующих пространственные координаты и параметры траектории движения мобильного средства-носителя объекта радиоподавления 2m, которые вместе с план-графиком DИЗС в соответствии с протоколом внутрикомплексного информационного обмена передает через радиостанцию 5 и передающую антенну 6 в адрес работоспособных станций радиопомех 3n,  .
.
Радиосигналы, содержащие кодограмму, через приемную антенну 20 и радиостанцию 18 поступают в вычислитель 21 каждой работоспособной станции радиопомех 3n,  .
.
Вычислитель 21, приняв кодограмму из состава станции разведки 3n,  , формирует и передает по линиям внутриобъектовой связи кодограммы инициализации работы блока управления передатчиком 30 блока управления передающей антенны 33, блока синтезатора зондирующего сигнала 35.
, формирует и передает по линиям внутриобъектовой связи кодограммы инициализации работы блока управления передатчиком 30 блока управления передающей антенны 33, блока синтезатора зондирующего сигнала 35.
Блок синтезатора зондирующего сигнала 35, получив кодограмму, формирует зондирующий сигнал, который передает на второй вход блока управления передатчиком 30.
Блок управления передающей антенной 33, получив кодограмму, вырабатывает и передает в адрес устройства ориентации передающей антенны 32 соответствующие заданным углам пространственной ориентации передающей антенны 32 сигналы в форматах специализированных интерфейсов управления функциональными модулями этого устройства.
Блок управления радиопередатчиком 30, получив кодограмму и приняв от блока синтезатора зондирующего сигнала 35 зондирующий сигнал, вырабатывает и передает в адрес передатчика радиопомех 31 соответствующие план-графику DИЗС работы станции радиопомех 3n на излучение зондирующего сигнала, кодограммы и сигналы в форматах специализированных интерфейсов управления с его функциональными модулями и устройствами.
Передающая антенна 32 излучает сформированные и усиленные передатчиком радиопомех 31 зондирующие радиосигналы в заданном пространственном направлении.
В течение всего рассматриваемого интервала времени работы КОМПЛЕКСА в режиме активной многопозиционной радиолокации блок определения собственных координат 11, активная антенна 12, приемоизмеритель 13, модуль фильтров помеховых сигналов 14, модуль фильтров зондирующих сигналов 15, модуль измерения зондирующих сигналов 16 пункта управления 4 и блок определения собственных координат 24, активная антенна 25, приемоизмеритель 26, модуль фильтров помеховых сигналов 27, модуль фильтров зондирующих сигналов 28, модуль измерения зондирующих сигналов 29 станций радиопомех 3n,  работает в готовности к приему излучаемого (прямого) и отраженного мобильным средством - носителем объекта радиоподавления зондирующих радиосигналов.
работает в готовности к приему излучаемого (прямого) и отраженного мобильным средством - носителем объекта радиоподавления зондирующих радиосигналов.
Принятая активной антенной 12 (25) (для пункта управления 4 в скобках для станций радиопомех 3n,  ) аддитивная смесь SНПЗ, состоящая из навигационных сигналов от навигационных спутников ГНСС (SH), помеховых сигналов от передатчиков радиопомех 31 станций радиопомех 3n (SП), в случае их одновременного излучения с зондирующим сигналом, излучаемого и отражаемого зондирующих сигналов (SЗ) с выхода активной антенны 12 (25), поступает на первый вход модуля фильтров помеховых сигналов 14 (27). Модуль фильтров помеховых сигналов 14 (27) осуществляет режекцию (удаление) из принятой аддитивной смеси сигналов SНПЗ всех помеховых сигналов SП, идентифицируемых и локализуемых на фоне различного рода шумов (SШ), присутствующих на выходе активной антенны 12 (25). В результате такой фильтрации на выходе модуля фильтров помеховых сигналов 14 (26) в идеальном случае на фоне некомпенсированных шумов будет присутствовать аддитивная смесь навигационных и зондирующих сигналов SНЗ.
) аддитивная смесь SНПЗ, состоящая из навигационных сигналов от навигационных спутников ГНСС (SH), помеховых сигналов от передатчиков радиопомех 31 станций радиопомех 3n (SП), в случае их одновременного излучения с зондирующим сигналом, излучаемого и отражаемого зондирующих сигналов (SЗ) с выхода активной антенны 12 (25), поступает на первый вход модуля фильтров помеховых сигналов 14 (27). Модуль фильтров помеховых сигналов 14 (27) осуществляет режекцию (удаление) из принятой аддитивной смеси сигналов SНПЗ всех помеховых сигналов SП, идентифицируемых и локализуемых на фоне различного рода шумов (SШ), присутствующих на выходе активной антенны 12 (25). В результате такой фильтрации на выходе модуля фильтров помеховых сигналов 14 (26) в идеальном случае на фоне некомпенсированных шумов будет присутствовать аддитивная смесь навигационных и зондирующих сигналов SНЗ.
С выхода модуля фильтрации помеховых сигналов 14 (26) аддитивная смесь навигационных и зондирующих сигналов SНЗ, а также некомпенсированных шумов передается на первый вход модуля фильтрации зондирующих сигналов 15 (28). Модуль фильтров зондирующих сигналов 15 (28) осуществляет идентификацию и селекцию излучаемого (SИЗ) и отражаемого (SОЗ) зондирующих сигналов с последующей выдачей этих сигналов на первый выход и далее на первый вход модуля измерения параметров зондирующих сигналов 16 (29). Кроме того, модуль фильтров зондирующих сигналов 15 (28) осуществляет режекцию зондирующих сигналов SЗ из смеси навигационных и зондирующих сигналов SНЗ с выдачей навигационных сигналов SH на фоне нескомпенсированных шумов со второго выхода на второй выход приемоизмерителя 13 (26).
Модуль измерения параметров зондирующих сигналов 16 (29) обеспечивает определение значений временных и частотных параметров зондирующих сигналов SИЗ и SОЗ (время запаздывания, доплеровская частота и т.п.) с привязкой шкале единого времени (ЕПЗС-3n - для станции радиопомех 3n, ЕПЗС-4 - для пункта управления 4), характеризующих пространственные координаты и параметры траектории движения мобильного средства-носителя объекта радиоподавления 2m. С выхода модуля измерения параметров зондирующих сигналов 16 (29) синхронизированные значения временных и частотных параметров зондирующих сигналов передаются на третий вход вычислителя 8 (21). Вычислитель 21 на основе данных ЕПЗС-3n формирует кодограммы донесения и передает их через радиостанцию 18 и передающую антенну 19 в адрес пункта управления 4.
Радиосигналы, содержащие кодограммы,  , через приемную антенну 7 и радиостанцию 5 поступают в вычислитель 8.
, через приемную антенну 7 и радиостанцию 5 поступают в вычислитель 8.
На основе массива привязанных к шкале единого времени данных о значениях временных и частотных параметров зондирующих сигналов SИЗ и SОЗ, полученных от станций радиопомех (ЕПЗС-3n,  ) и от аппаратуры пункта управления 4 (ЕПЗС-4), вычислитель 8 автоматически решает задачу определения пространственных координат, параметров траектории движения мобильного средства-носителя объекта радиоподавления 2m и определения пространственных координат Qi области пространства 1m прогнозируемого на заданный интервал времени (tHi, tKi) местоположения объекта радиоподавления 2m, а также формирования наряда станций радиопомех .
) и от аппаратуры пункта управления 4 (ЕПЗС-4), вычислитель 8 автоматически решает задачу определения пространственных координат, параметров траектории движения мобильного средства-носителя объекта радиоподавления 2m и определения пространственных координат Qi области пространства 1m прогнозируемого на заданный интервал времени (tHi, tKi) местоположения объекта радиоподавления 2m, а также формирования наряда станций радиопомех .
Результаты решения этих задач вычислитель 8 выдает для визуализации на дисплей 10.
Оператор пункта управления 4 с учетом данных о наряде станций радиопомех согласно предписаниям плана применения КОМПЛЕКСА или внеочередному указанию вышестоящего органа управления вводит с пульта управления 9 в вычислитель 8 команду инициализации процедуры постановки радиопомех объекту радиоподавления 2m в области пространства 1m.
Вычислитель 8, приняв команду инициализации процедуры постановки радиопомех, формирует кодограммы предписаний о применении станций радиопомех 3n,  по назначению на интервале времени (tHi, tKi) с параметрами излучаемых радиопомех
по назначению на интервале времени (tHi, tKi) с параметрами излучаемых радиопомех  и параметрами угловой ориентации передающей антенны 32, которые в соответствии с протоколом внутрикомплексного информационного обмена передает через радиостанцию 5 и передающую антенну 6 в адрес включенных в наряд станций радиопомех 3n.
и параметрами угловой ориентации передающей антенны 32, которые в соответствии с протоколом внутрикомплексного информационного обмена передает через радиостанцию 5 и передающую антенну 6 в адрес включенных в наряд станций радиопомех 3n.
Радиосигналы, содержащие кодограммы предписаний, через приемную антенну 20 и радиостанцию 18 поступают в вычислитель 21 станции радиопомех 3n, включенной в наряд  , то есть
, то есть  .
.
Приняв и обработав кодограммы предписаний, вычислитель 21 формирует и передает по линиям внутриобъектовой связи: кодограмму задания блоку управления передающей антенны 33, содержащую определенные предписанием параметры угловой ориентации передающей антенны 32 ( ); кодограмму задания блоку управления передатчиком 30, содержащую определенные предписанием амплитудные, частотные, фазовые и временные параметры помехового сигнала (
); кодограмму задания блоку управления передатчиком 30, содержащую определенные предписанием амплитудные, частотные, фазовые и временные параметры помехового сигнала ( ), которые должны быть сформированы и усилены передатчиком радиопомех 31.
), которые должны быть сформированы и усилены передатчиком радиопомех 31.
Блок управления передающей антенной 33 при получении кодограммы управления вырабатывает и передает в адрес устройства ориентации предающей антенны 34, соответствующие параметрам  кодограммы и сигналы в форматах специализированных интерфейсов управления функциональными модулями этого устройства.
кодограммы и сигналы в форматах специализированных интерфейсов управления функциональными модулями этого устройства.
Устройство ориентации передающей антенны 33, отрабатывая эти команды и сигналы, обеспечивает ориентацию передающей антенны 32, соответствующую параметрам  .
.
Блок управления передатчиком 30 при получении кодограммы управления формирует помеховый сигнал с определенными предписанием амплитудными, частотными, фазовыми и временными параметрами (из состава массива  ) и передает его на вход передатчика радиопомех 31.
) и передает его на вход передатчика радиопомех 31.
Передатчик радиопомех 31 при получении кодограммы управления и помеховый сигнал от блока управления передатчиком 30 вырабатывает имеющие соответствующие параметрам радиопомех  псевдослучайного временного регламента работы
псевдослучайного временного регламента работы  кодограммы и сигналы в форматах специализированных интерфейсов управления его функциональными модулями и устройствами усиливает их и передает на передающую антенну 32.
кодограммы и сигналы в форматах специализированных интерфейсов управления его функциональными модулями и устройствами усиливает их и передает на передающую антенну 32.
Передающая антенна 32 излучает сформированные и усиленные передатчиком 31 радиопомехи в направлении области пространства 1m.
Таким образом, в области пространства 1m совокупностью станций радиопомех, включенных в наряд , обеспечивается уровень суммарной мощности некогерентных радиопомех не ниже требуемого для гарантированного радиоподавления НАЛ ГНСС.
Работа КОМПЛЕКСА при создании радиопомех в одиночных областях пространства 1m для непересекающихся временных интервалов (tKi≤tHi+1, i=1, 2, 3, …) представляется последовательностью реализаций вышеназванного штатного одиночного цикла функционирования.
При необходимости создания радиопомех одновременно в нескольких областях пространства 1m работа КОМПЛЕКСА представляется параллельной (квазипараллельной) реализации нескольких штатных одиночных циклов функционирования. При этом задачей пункта управления 4 является динамическая оптимизация формируемых нарядов станции радиопомех с учетом их текущего местоположения и технических возможностей по созданию радиопомех, последовательного сокращения ресурса (в первую очередь - количества) станций радиопомех для включения в очередной наряд ( ) и приоритета (важности) объектов радиоподавления 2m.
) и приоритета (важности) объектов радиоподавления 2m.
В предельном случае при невозможности ранжирования объектов радиоподавления 2m по приоритету, невозможности или нецелесообразности локализации областей пространства создания радиопомех 1m вследствие значительного числа пространственно распределенных объектов радиоподавления 2m работа КОМПЛЕКСА будет состоять в формировании максимально широкой (приближающейся к круговой) в азимутальной плоскости области пространства создания радиопомехи.
| название | год | авторы | номер документа |
|---|---|---|---|
| ПРОСТРАНСТВЕННО-РАСПРЕДЕЛЕННЫЙ КОМПЛЕКС СРЕДСТВ СОЗДАНИЯ РАДИОПОМЕХ | 2014 |
|
RU2563972C1 |
| Пространственно-распределенная система радиоподавления НАП ГНСС с функцией альтернативного координатно-временного обеспечения для санкционированных потребителей | 2017 |
|
RU2649407C1 |
| Навигационная аппаратура санкционированного потребителя с возможностью локальной навигации по сигналам несинхронизированных отечественных средств радиоэлектронного подавления глобальных навигационных спутниковых систем | 2021 |
|
RU2771435C1 |
| СИСТЕМА РАДИОПОДАВЛЕНИЯ НАВИГАЦИОННОЙ АППАРАТУРЫ ПОТРЕБИТЕЛЕЙ ГНСС ПРОТИВНИКА, СОВМЕСТИМАЯ С ОТЕЧЕСТВЕННОЙ АППАРАТУРОЙ ПОТРЕБИТЕЛЕЙ ГНСС | 2013 |
|
RU2539563C1 |
| Станция радиоподавления приемной аппаратуры спутников-ретрансляторов низкоорбитальной системы спутниковой связи | 2018 |
|
RU2695810C1 |
| Способ определения координат воздушного судна по сигналам несинхронизированных передатчиков помех глобальным навигационным спутниковым системам | 2023 |
|
RU2811068C1 |
| Пространственно-распределенная система радиопомех на беспилотных летательных аппаратах | 2023 |
|
RU2807312C1 |
| Интегрированный комплекс бортового оборудования беспилотного летательного аппарата | 2023 |
|
RU2809930C1 |
| НАВИГАЦИОННОЕ УСТРОЙСТВО | 2001 |
|
RU2190189C1 |
| Роботизированная пространственно-распределенная система радиоэлектронного подавления приемных устройств потребителей глобальных навигационных спутниковых систем | 2017 |
|
RU2666126C1 |


Изобретение относится к области радиотехники и может быть использовано для создания преднамеренных радиопомех большой мощности размещаемым на высокоскоростных и высокоманевренных мобильных средствах приемным устройствам навигационной аппаратуры потребителей, работающей по сигналам глобальных навигационных спутниковых систем (ГНСС). Достигаемый технический результат – обеспечение создания радиопомех навигационной аппаратуре потребителей ГНСС. Указанный результат достигается путем применения совокупности разнесенных в пространстве передатчиков радиопомех небольшой мощности с концентрацией суммарной энергии радиопомех в заданной области пространства на заданном интервале времени, при этом пространственно-распределенный комплекс создания радиопомех навигационной аппаратуре потребителей глобальных навигационных систем с многофункциональным использованием радиоэлектронного оборудования состоит из пункта управления и станций радиопомех, выполненных и взаимосвязанных между собой определенным образом. 3 ил.
Пространственно-распределенный комплекс средств создания радиопомех навигационной аппаратуре потребителей глобальных навигационных систем с многофункциональным использованием радиоэлектронного оборудования, содержащего радиостанцию, соединенную с передающей и приемной антеннами, а также блок электропитания, при этом радиостанция связана с вычислителем, соединенным с пультом управления и дисплеем, причем вычислитель предназначен для определения прогнозируемой на заданный интервал времени области пространства местоположения объекта радиоподавления и управления разнесенными в пространстве N станциями радиопомех, каждая из которых содержит радиостанцию канала управления, соединенную с передающей и приемной антеннами, блок электропитания, при этом радиостанция канала управления станции радиопомех связана с вычислителем станции радиопомех, соединенным с пультом управления и дисплеем, вычислитель станции радиопомех предназначен для обеспечения угловой ориентации диаграмм направленности антенн, излучающих радиопомехи, станция радиопомех содержит также передатчик радиопомех с антенной излучения радиопомех, блок управления передатчиком радиопомех, устройство угловой ориентации антенны излучения радиопомех, при этом блок управления передатчиком и блок управления угловым положением антенны излучения радиопомех связаны с вычислителем станции радиопомех, отличающийся тем, что в пункт управления дополнительно введены приемоизмеритель, предназначенный для определения координат носителя соответствующей составной части комплекса, активная антенна, модуль фильтров помеховых сигналов, модуль фильтров зондирующих сигналов, модуль измерения зондирующих сигналов, блок определения собственных координат, при этом активная антенна соединена с входом модуля фильтров помеховых сигналов, выход которых соединен с входом модуля фильтров зондирующих сигналов, соединенным с соответствующим входом модуля измерения зондирующих сигналов, кроме того, вторые входы модуля фильтров помеховых сигналов, модуля фильтров зондирующих сигналов и модуля измерения зондирующих сигналов соединены с выходом блока определения соответствующих координат, который взаимосвязан с приемоизмерителем и вычислителем пункта управления, причем выход модуля фильтров зондирующих сигналов соединен с соответствующим входом приемоизмерителя, в каждую из N станций радиопомех дополнительно введены приемоизмеритель, предназначенный для определения координат носителя соответствующей частоты комплекса, активная антенна, модуль фильтров помеховых сигналов, модуль фильтров зондирующих сигналов, модуль измерения зондирующих сигналов, блок формирования зондирующих сигналов, при этом активная антенна соединена с входом модуля фильтров помеховых сигналов, выход которого соединен с входом модуля фильтров зондирующих сигналов, соединенным с соответствующим входом модуля измерения зондирующих сигналов, кроме того, вторые входы модуля фильтров помеховых сигналов, модуля фильтров зондирующих сигналов и модуля измерения зондирующих сигналов соединены с входом блока определения собственных координат, который взаимосвязан с приемоизмерителем и вычислителем станции радиопомех, причем вход модуля фильтров зондирующих сигналов соединен с соответствующим входом приемоизмерителя станции радиопомех, блок формирования зондирующего сигнала взаимосвязан с вычислителем станции радиопомех.
| ПРОСТРАНСТВЕННО-РАСПРЕДЕЛЕННЫЙ КОМПЛЕКС СРЕДСТВ СОЗДАНИЯ РАДИОПОМЕХ | 2014 |
|
RU2563972C1 |
| КОМПЕНСАТОР РАДИОПОМЕХ ДЛЯ ОБЕСПЕЧЕНИЯ ЭЛЕКТРОМАГНИТНОЙ СОВМЕСТИМОСТИ ОТЕЧЕСТВЕННОЙ НАП ГНСС С ОТЕЧЕСТВЕННЫМ СРЕДСТВОМ РАДИОПОДАВЛЕНИЯ НАП ПРОТИВНИКА ПРИ РАБОТЕ НА СОВПАДАЮЩИХ ЧАСТОТАХ | 2014 |
|
RU2563973C1 |
| СПОСОБ СОЗДАНИЯ РЕТРАНСЛИРОВАННЫХ ПОМЕХ | 2012 |
|
RU2523430C2 |
| УСТРОЙСТВО ФОРМИРОВАНИЯ РАДИОПОМЕХ | 1994 |
|
RU2108677C1 |
| KR 2013083696 A, 23.07.2013 | |||
| US 20070004330 A1, 04.01.2007 | |||
| WO 1998048295 A1, 29.10.1998. | |||

