Изобретение относится к области радионавигации в условиях радиоэлектронной борьбы и может быть использовано при разработке системы локальной радионавигации (ЛРН) по сигналам несинхронизированных отечественных средств радиоэлектронного подавления глобальных навигационных спутниковых систем (ГНСС).
Известен способ определения местоположения подвижного объекта по сигналам глобальной навигационной спутниковой системы (ГНСС) [1], в котором текущие координаты определяются на борту объекта позиционирования с помощью бортовых навигационных приемников. При этом осуществляется прием навигационных радиосигналов, излучаемых навигационными космическими аппаратами ГНСС. Для надежного определения координат необходим одновременный устойчивый прием сигналов от нескольких навигационных космических аппаратов. Однако наличие мощных источников помех ГНСС может привести к искажениям результатов определения координат, либо вообще не позволит их оценить.
Известен способ локальной радионавигации по сигналам несинхронизированных отечественных средств радиоэлектронного подавления глобальных навигационных спутниковых систем [2], использующий пространственно-распределенную систему радиоподавления навигационной аппаратуры потребителей с функцией альтернативного координатно-временного обеспечения для санкционированных потребителей в пределах зоны действия пространственно-распределенной системы радиоподавления, состоящую из станций создания преднамеренных радиопомех, имеющих устройство создания радиопомех с функцией формирования координатно-временного сигнала, и санкционированных потребителей, имеющих навигационную аппаратуру потребителей, обеспечивающую прием альтернативного координатно-временного сигнала от станций создания преднамеренных радиопомех, в которой станции создания преднамеренных радиопомех не синхронизированы между собой и не синхронизированы с навигационной аппаратуры санкционированных потребителей (НАСП), а для решения задачи локальной радионавигации осуществляется настройка НАСП:
- в режиме «Подготовка» в НАСП вводится информация о структуре альтернативных навигационных сигналов станций создания преднамеренных радиопомех, их координаты, координаты точки начальной синхронизации, а также заданное значение максимальной ошибки при определении местоположения НАСП;
- в режиме «Синхронизация» в точке начальной синхронизации НАСП осуществляет раздельный прием альтернативных навигационных сигналов всех станций создания преднамеренных радиопомех, измерение значений задержек моментов приема альтернативных навигационных сигналов станций создания преднамеренных радиопомех относительно шкалы времени НАСП, расчет временных поправок, учитывающих рассинхронизм в работе станций создания преднамеренных радиопомех и НАСП с использованием информации о местоположении станций создания преднамеренных радиопомех и точки начальной синхронизации НАСП, расчет собственных координат НАСП в точке начальной синхронизации с использованием измеренных значений задержек принятых альтернативных навигационных сигналов и вычисленных временных поправок, оценку качества начальной синхронизации; критерием успешной синхронизации является совпадение вычисленных собственных координат НАСП в точке начальной синхронизации с известными координатами точки начальной синхронизации в пределах заданного значения максимальной ошибки при определении местоположения НАСП;
- в режиме «Навигация» в произвольной точке в пределах зоны действия пространственно-распределенной системы радиоподавления ГНСС НАСП осуществляет раздельный прием альтернативных навигационных сигналов всех станций создания преднамеренных радиопомех, измерение значений задержек моментов приема альтернативных навигационных сигналов станций создания преднамеренных радиопомех относительно шкалы времени НАСП и расчет текущих собственных координат НАСП с использованием текущих измеренных значений задержек принятых альтернативных навигационных сигналов и вычисленных в режиме «Синхронизация» временных поправок.
Недостатком этого способа является необходимость реализации дополнительного режима «Синхронизация», в ходе которого НАСП помещается в точку начальной синхронизации, где на основании измеренных значений задержек моментов приема альтернативных навигационных сигналов станций создания преднамеренных радиопомех относительно шкалы времени НАСП, осуществляется расчет временных поправок, учитывающих рассинхронизм в работе станций создания преднамеренных радиопомех и НАСП с использованием информации о местоположении станций создания преднамеренных радиопомех и точки начальной синхронизации НАСП.
Техническое решение направленно на определение координат воздушного судна по помеховым сигналам несинхронизированных передатчиков помех глобальным навигационным спутниковым системам без реализации дополнительного режима начальной синхронизации НАСП.
Технический результат достигается тем, что в НАСП применяется измеритель курса, обеспечивающий измерение курсового угла между направлением на север и строительной осью воздушного судна (СОВС), и приемное устройство, состоящее из K антенн (k=1, 2, …, K), образующих антенную решетку, ориентированную относительно строительной оси воздушного судна, K приемников, K аналого-цифровых преобразователей (АЦП), K цифровых М-канальных корреляторов, цифрового вычислителя (ЦВ), синтезатора частот (СЧ), постоянного запоминающего устройства (ПЗУ) и обеспечивающее:
- независимую обработку суммарного помехового сигнала передатчиков помех всех ССПР в каждом k-ом (k=1, 2, …, K) канале приемного устройства (прием, усиление, преобразование на нулевую частоту, формирование комплексных отсчетов цифрового суммарного сигнала на нулевой частоте);
- независимую корреляционную обработку цифрового суммарного сигнала в каждом k-ом цифровом корреляторе приемного устройства в M цифровых фильтрах, согласованных с ПСП передатчиков ССПР, с определением оценок фазы сигнала передатчика каждой m-ой ССПР в момент регистрации отклика в каждом k-ом канале;
- формирование векторов-столбцов коэффициентов, обусловленных сдвигом фаз откликов сигнала передатчика каждой m-ой ССПР, зарегистрированных в центральном и в каждом периферийном канале приемного устройства;
- предварительное формирование и хранение в ПЗУ матрицы направленности антенной решетки, зависящей от ее геометрических параметров и определяющей сдвиги фаз сигналов в каждой периферийной антенне относительно сигнала в центральной антенне при приходе сигнала с заданного направления;
- оценку направления на каждую m-ую ССПР относительно строительной оси воздушного судна, как направление, соответствующее максимальному значению пространственного спектра, получаемого путем перемножения матрицы направленности антенной решетки и вектора-столбца коэффициентов, обусловленных сдвигом фаз откликов сигналов передатчика соответствующей m-ой ССПР, зарегистрированных в центральном и в каждом периферийном канале приемного устройства;
- оценку азимута прихода сигнала передатчика m-ой ССПР как сумму оценок курсового угла и направления на m-ую ССПР;
- оценку планарных координат воздушного судна угломерным методом путем решения системы уравнений, связывающих планарные координаты воздушного судна, оценочные значения азимута  прихода сигнала каждого m-го передатчика помех и известные планарные координаты передатчиков помех.
прихода сигнала каждого m-го передатчика помех и известные планарные координаты передатчиков помех.
Сущность изобретения поясняется рисунками.
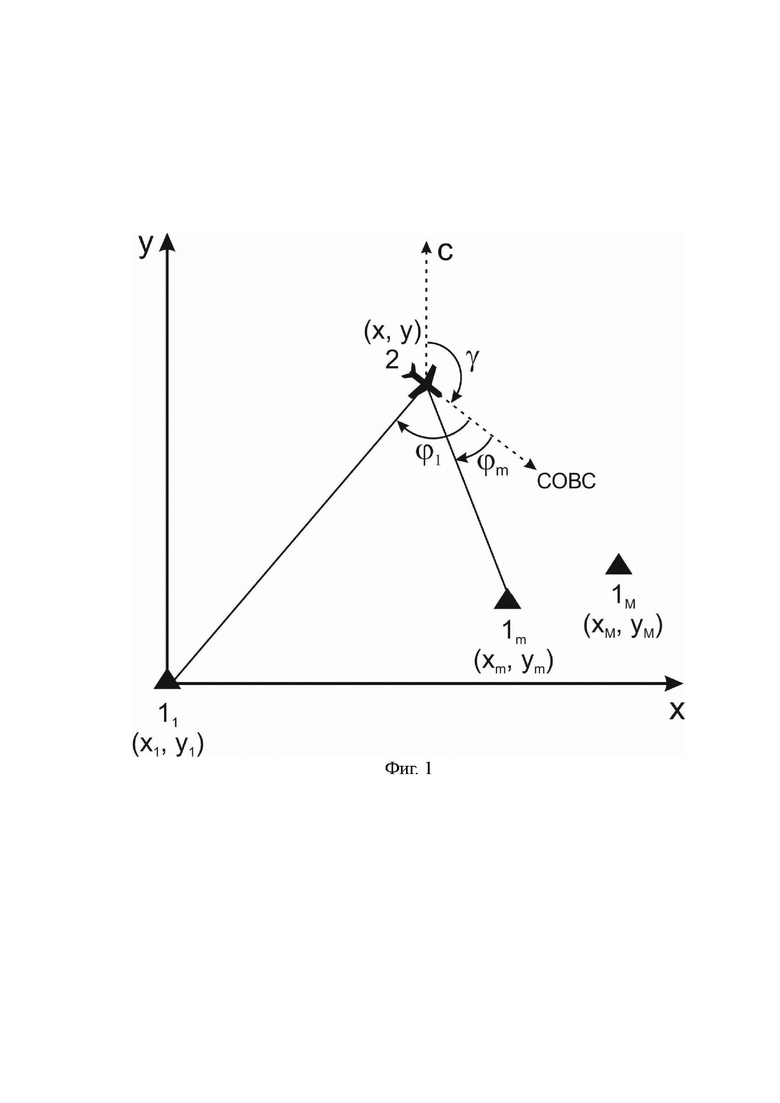
На фиг. 1 приведена схема взаимодействия станций создания преднамеренных помех 1m и санкционированного потребителя - воздушного судна 2 в прямоугольной планарной системе координат XОY.
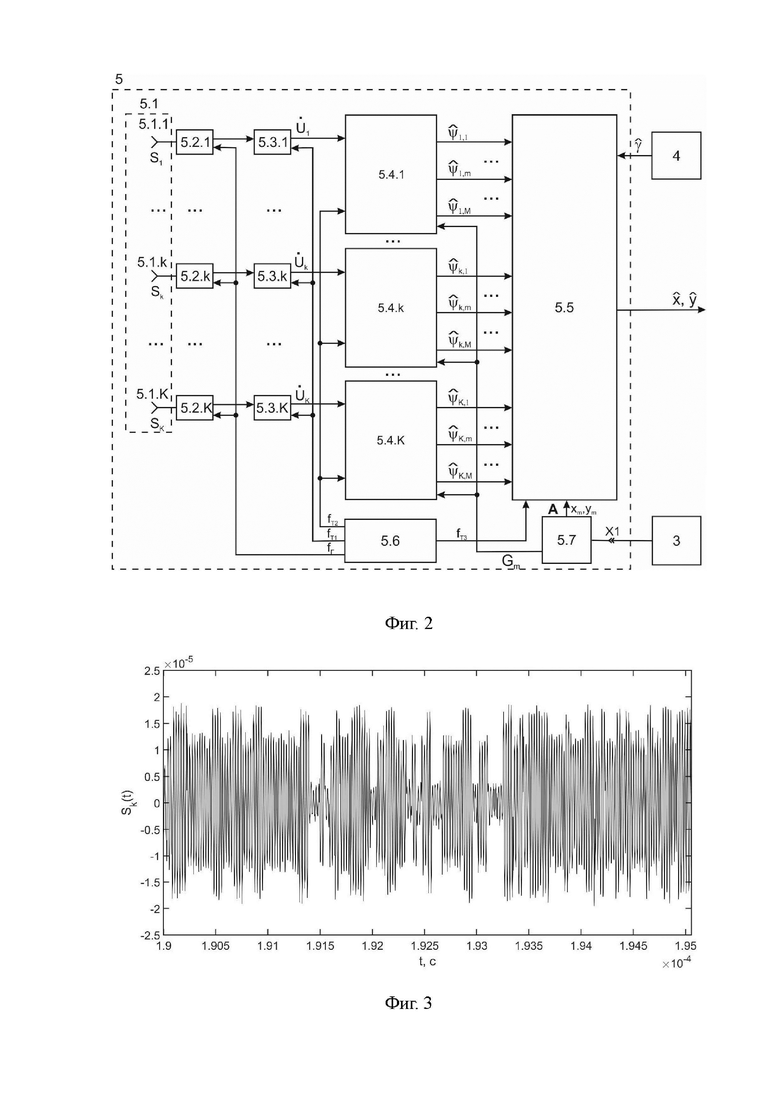
На фиг. 2 приведена структурная схема навигационной аппаратуры санкционированного потребителя.
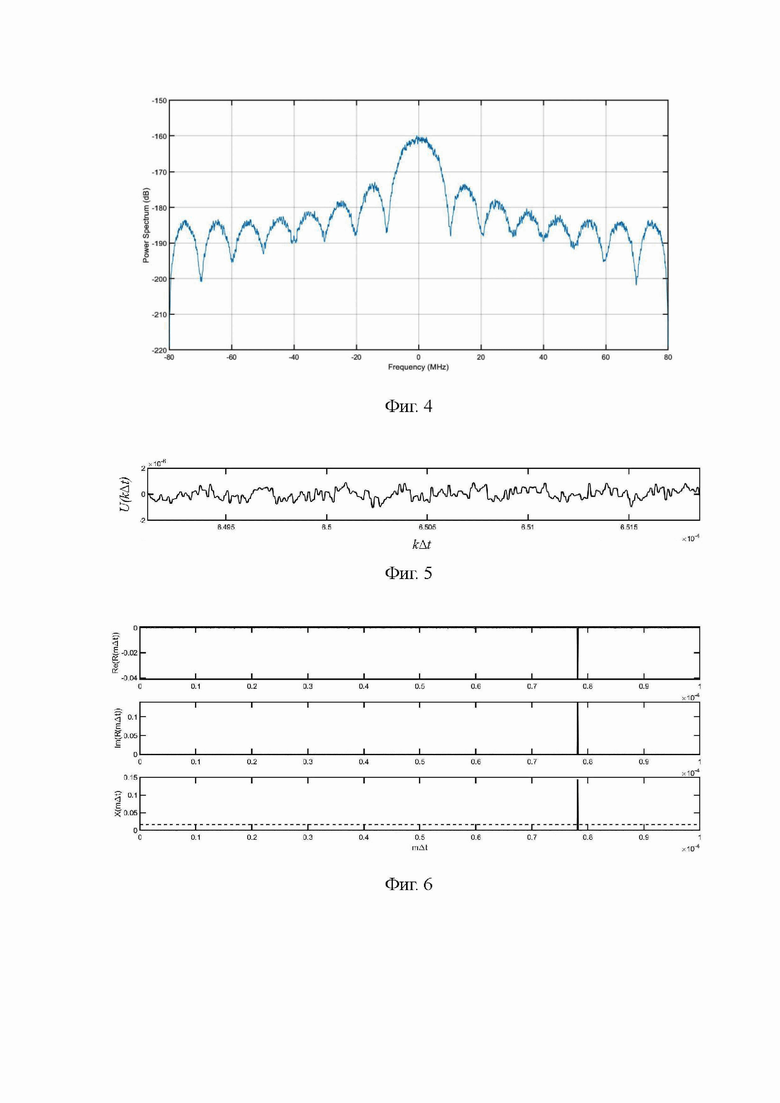
На фиг. 3 показан временной график суммарного сигнала передатчиков всех ССПР 1m на входе k-ой антенны 5.1.k антенной решетки 5.1.
На фиг. 4 показан спектр суммарного сигнала  на нулевой частоте.
на нулевой частоте.
На фиг. 5 приведен временной график действительной части комплексного цифрового суммарного сигнала на нулевой частоте  .
.
На фиг. 6 показаны действительная (а), мнимая (б) составляющие и огибающая (в) корреляционной функции  сигнала передатчика m-ой ССПР 1m в k-ом канале обработки.
сигнала передатчика m-ой ССПР 1m в k-ом канале обработки.
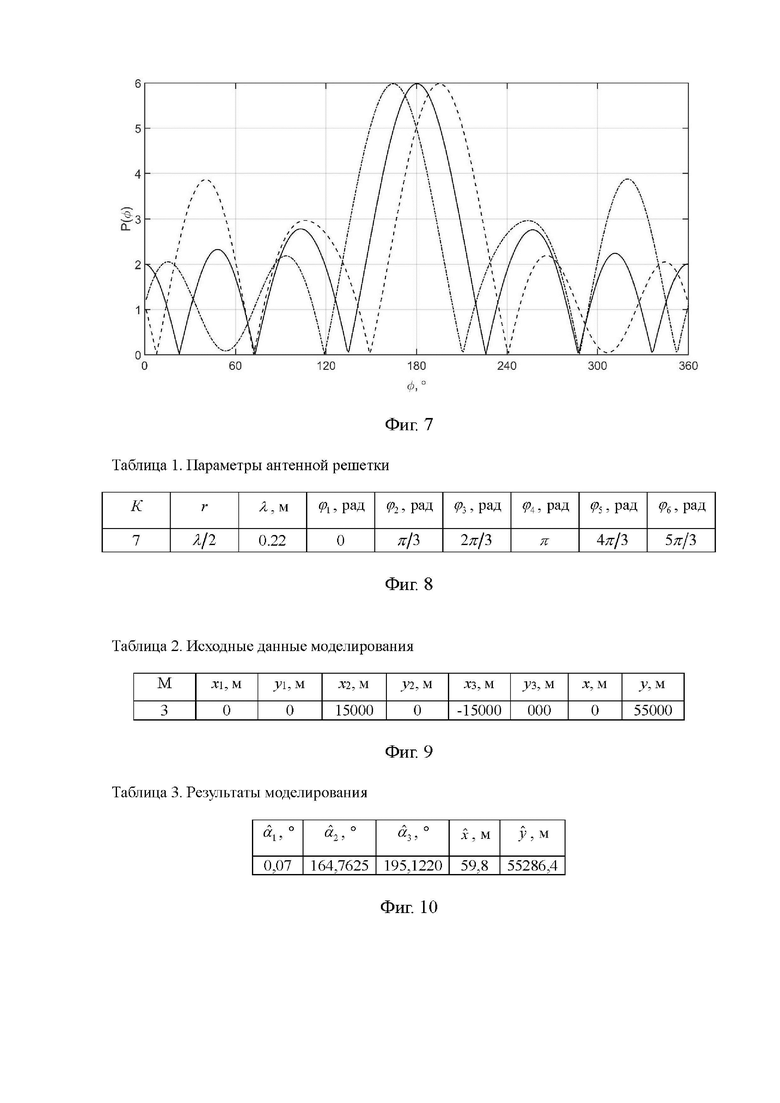
На фиг. 7 приведены графики пространственного спектра P сигналов трех ССПР 1m, принятых антенной решеткой 5.1.
На фиг. 8. приведены параметры антенной решетки 5.1 приемного устройства НАСП, использованные при оценке эффективности предложенного способа в ходе численного имитационного моделирования.
На фиг. 9 представлены исходные данные моделирования.
На фиг. 10 представлены результаты моделирования.
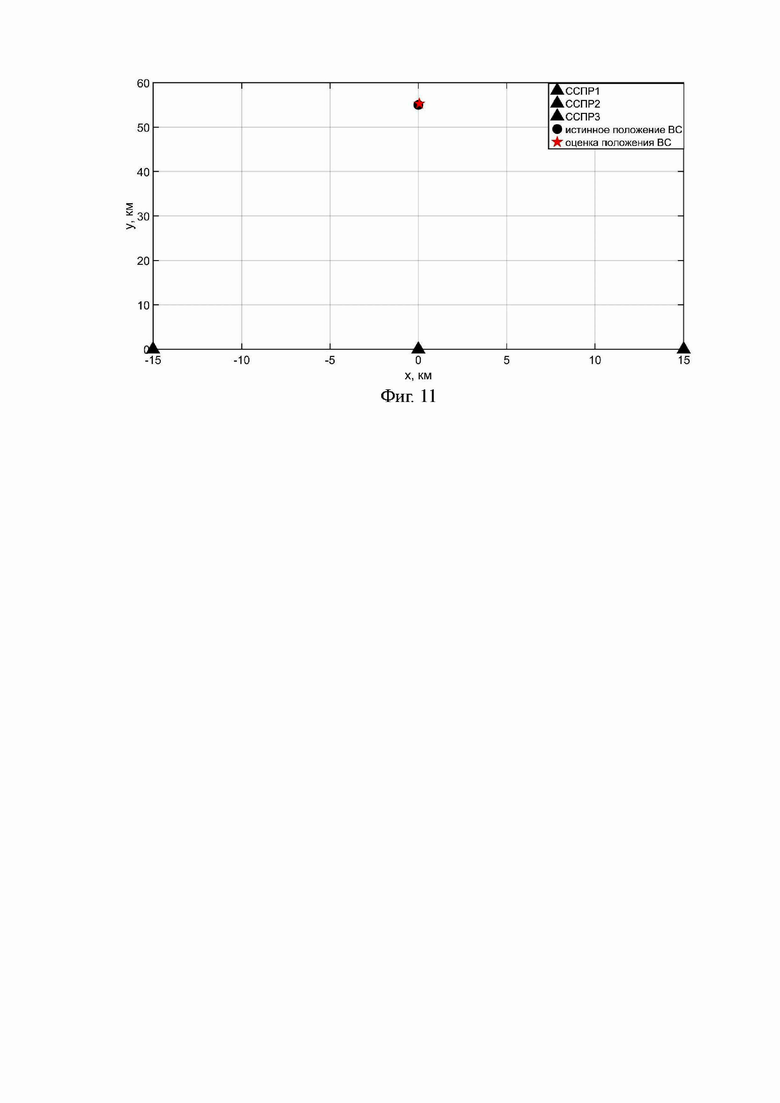
На фиг. 11 приведены графические результаты численного имитационного моделирования.
Способ определения координат воздушного судна по сигналам несинхронизированных передатчиков помех глобальным навигационным спутниковым системам реализуется в пространственно-распределенной системе радиоподавления навигационной аппаратуры потребителей, состоящей из станций создания преднамеренных радиопомех (ССПР) 1m (m=1, 2, …, M) с известными координатами  и санкционированного потребителя - воздушного судна 2 с неизвестными координатами
и санкционированного потребителя - воздушного судна 2 с неизвестными координатами  , имеющего НАСП (фиг. 1). Станции создания преднамеренных радиопомех не синхронизированы между собой и не синхронизированы с НАСП, а для решения задачи локальной радионавигации осуществляется ввод в НАСП информации о структуре сигналов и координатах ССПР 1m.
, имеющего НАСП (фиг. 1). Станции создания преднамеренных радиопомех не синхронизированы между собой и не синхронизированы с НАСП, а для решения задачи локальной радионавигации осуществляется ввод в НАСП информации о структуре сигналов и координатах ССПР 1m.
В НАСП применяется измеритель курса 4, K-канальное приемное устройство 5, состоящее из K антенн 5.1.k (k=1, 2, …, K), образующих антенную решетку 5.1, ориентированную относительно строительной оси воздушного судна 2, K приемников 5.2.k, K аналого-цифровых преобразователей 5.3.k, K цифровых М-канальных корреляторов 5.4.k (количество каналов коррелятора соответствует количеству ССПР 1m), цифрового вычислителя 5.5, синтезатора частот 5.6 и постоянного запоминающего устройства 5.7 (фиг. 2). Информация о структуре сигналов и координатах ССПР 1m вводится в приемное устройство НАСП с использованием съемного носителя 3, подключаемого к ПЗУ приемного устройства через разъем Х1 (фиг. 2).
Способ определения координат воздушного судна по сигналам несинхронизированных передатчиков помех глобальным навигационным спутниковым системам осуществляется следующим образом.
1. В измерителе курса 4 осуществляется оценка курса воздушного судна 2  (угол между направлением на север и строительной осью воздушного судна 2, измеряется по часовой стрелке относительно направления на север), значение которого поступает в цифровой вычислитель 5.5 (фиг. 2).
(угол между направлением на север и строительной осью воздушного судна 2, измеряется по часовой стрелке относительно направления на север), значение которого поступает в цифровой вычислитель 5.5 (фиг. 2).
2. Передатчик каждой m-ой ССПР 1m формирует и излучает помеховый ФКМ сигнал, модулированный уникальной псевдослучайной последовательностью (ПСП), обеспечивающей однозначную идентификацию ССПР 1m
 , (1)
, (1)
где Am - амплитуда сигнала, Gm(t) - ПСП, f0 - несущая частота сигнала,
ψm - начальная фаза сигнала.
3. В приемном устройстве 5 НАСП в каждом k-ом канале (k=1…K) осуществляются следующие операции.
3.1. На входе k-ой антенны 5.1.k антенной решетки 5.1 формируется суммарный сигнал передатчиков всех ССПР 1m (фиг. 3)
 , (2)
, (2)
где  - задержка распространения сигнала от m-ой ССПР 1m до антенны 5.1.k антенной решетки 5.1;
- задержка распространения сигнала от m-ой ССПР 1m до антенны 5.1.k антенной решетки 5.1;  - амплитуда сигнала m-ой ССПР 1m на входе k-ой антенны.
- амплитуда сигнала m-ой ССПР 1m на входе k-ой антенны.
3.2. С выхода антенны 5.1.k суммарный сигнал поступает в приемник 5.2.k, где осуществляется его селекция, усиление и перенос его спектра на нулевую частоту (фиг. 4). Сигнал гетеродина с частотой fг, необходимый для переноса спектра сигнал на нулевую частоту, поступает на приемник 5.2.k из синтезатора частоты 5.6.
3.3. С выхода приемника 5.2.k сигнал на нулевой частоте поступает на АЦП 5.3.k, где осуществляется его аналогово-цифровое преобразование с формированием комплексных отсчетов цифрового сигнала на нулевой частоте , где  - интервал дискретизации, i - номер дискретного отсчета (действительная часть показана на фиг. 5). Тактовые импульсы с частотой fт1, необходимые для работы АЦП, поступают на АЦП 5.3.k из синтезатора частоты 5.6.
- интервал дискретизации, i - номер дискретного отсчета (действительная часть показана на фиг. 5). Тактовые импульсы с частотой fт1, необходимые для работы АЦП, поступают на АЦП 5.3.k из синтезатора частоты 5.6.
3.4. С выхода АЦП 5.3.k цифровой суммарный сигнал на нулевой частоте , поступает на цифровой М-канальный коррелятор 5.4.k, где осуществляется:
- обработка в М фильтрах, согласованных с ПСП передатчиков ССПР 1m, с формированием комплексных корреляционных функций (рис. 6 а, б)
 , (3)
, (3)
 , (4)
, (4)
 , (5)
, (5)
где L - длина ПСП в дискретных отсчетах,  - временной сдвиг (задержка) сигнала в согласованном фильтре в дискретных отсчетах (изменяется в пределах длины ПСП z=1, 2, …, L). Тактовые импульсы с частотой fт2, необходимые для работы цифрового коррелятора, поступают на цифровой коррелятор 5.4.k из синтезатора частоты 5.6. Информация о ПСП Gm(t) сигналов ССПР, необходимая для работы согласованных фильтров, поступает на цифровой коррелятор 5.4.k из ПЗУ 5.7;
- временной сдвиг (задержка) сигнала в согласованном фильтре в дискретных отсчетах (изменяется в пределах длины ПСП z=1, 2, …, L). Тактовые импульсы с частотой fт2, необходимые для работы цифрового коррелятора, поступают на цифровой коррелятор 5.4.k из синтезатора частоты 5.6. Информация о ПСП Gm(t) сигналов ССПР, необходимая для работы согласованных фильтров, поступает на цифровой коррелятор 5.4.k из ПЗУ 5.7;
- вычисление огибающих корреляционных функций (фиг. 6в)
 ; (6)
; (6)
- вычисление среднеквадратического отклонения (СКО)  отсчетов огибающих корреляционных функций
отсчетов огибающих корреляционных функций  , на основании которых рассчитываются пороги обнаружения сигнала по заданной вероятности ложной тревоги Pлт в предположении Рэлеевского характера распределения шума огибающей корреляционной функции
, на основании которых рассчитываются пороги обнаружения сигнала по заданной вероятности ложной тревоги Pлт в предположении Рэлеевского характера распределения шума огибающей корреляционной функции
 ; (7)
; (7)
- определение максимального значения  огибающей корреляционной функции, которое сравнивается с порогом обнаружения, при этом сигнал считается обнаруженным если значение огибающей корреляционной функции превысило порог обнаружения
огибающей корреляционной функции, которое сравнивается с порогом обнаружения, при этом сигнал считается обнаруженным если значение огибающей корреляционной функции превысило порог обнаружения
 ; (8)
; (8)
- в случае обнаружения сигнала определяется соответствующий номер отсчета огибающей корреляционной функции
 ; (9)
; (9)
- определяется оценка фазы сигнала передатчика каждой m-ой ССПР 1m в момент регистрации отклика в k-ом канале
 ; (10)
; (10)
- полученные оценки  поступают в цифровой вычислитель 5.5.
поступают в цифровой вычислитель 5.5.
4. В цифровом вычислителе 5.5 осуществляются следующие операции вторичной обработки. (Тактовые импульсы с частотой fт3, необходимые для работы цифрового вычислителя, поступают на цифровой вычислитель 5.5 из синтезатора частоты 5.6).
4.1. Формируются М векторов-столбцов размером Kх1 оценок фазы сигналов передатчиков каждой m-ой ССПР 1m, зарегистрированных в каждом k-ом канале приемного устройства 5
 . (11)
. (11)
4.2. Векторы  преобразуются в векторы-столбцы (размером (K-1)х1) коэффициентов, обусловленных сдвигом фаз откликов сигналов передатчиков каждой m-ой ССПР 1m, зарегистрированных в центральном и в каждом периферийном канале приемного устройства 5
преобразуются в векторы-столбцы (размером (K-1)х1) коэффициентов, обусловленных сдвигом фаз откликов сигналов передатчиков каждой m-ой ССПР 1m, зарегистрированных в центральном и в каждом периферийном канале приемного устройства 5
 , (12)
, (12)
где  . Вектор
. Вектор  содержит в себе необходимую информацию о направлении прихода сигнала передатчика m-ой ССПР 1m.
содержит в себе необходимую информацию о направлении прихода сигнала передатчика m-ой ССПР 1m.
4.3. Для всей K-элементной антенной решетки 5.1 в диапазоне углов  с шагом
с шагом  предварительно формируется и хранится в ПЗУ 5.7 матрица направленности А, зависящая от геометрических параметров антенной решетки 5.1. Размер матрицы составит (Nx(K-1)), где
предварительно формируется и хранится в ПЗУ 5.7 матрица направленности А, зависящая от геометрических параметров антенной решетки 5.1. Размер матрицы составит (Nx(K-1)), где  - количество направлений (строк матрицы направленности). Элемент a(n,k) матрицы направленности определяет сдвиг фаз сигнала в центральной антенне 5.1.1 и k-ой периферийной антенне 5.1.k c угловой координатой
- количество направлений (строк матрицы направленности). Элемент a(n,k) матрицы направленности определяет сдвиг фаз сигнала в центральной антенне 5.1.1 и k-ой периферийной антенне 5.1.k c угловой координатой  при приходе сигнала с n-го направления
при приходе сигнала с n-го направления  ( и
( и  отсчитываются из фазового цента антенной решетки 5.1 от строительной оси воздушного судна по часовой стрелке)
отсчитываются из фазового цента антенной решетки 5.1 от строительной оси воздушного судна по часовой стрелке)
 , (13)
, (13)
где (r,φk) полярные координаты периферийных антенн 5.1.k, r=λ/2 - радиус антенной решетки 5.1 (расстояние между центральной антенной 5.1.1 и периферийными антеннами 5.1.k), равный половине длины волны λ помехового сигнала.
4.4. Формируется пространственный спектр Pm сигнала передатчика
m-ой ССПР, принятого антенной решеткой 5.1, путем перемножения матрицы направленности, поступающей из ПЗУ 5.7, и вектора сдвига фаз принятого сигнала
 . (14)
. (14)
Пространственный спектр Pm представляет собой вектор-столбец размером (Nx1) (фиг. 7).
4.5. Определяется оценка  направления на передатчик m-ой ССПР 1m, относительно строительной оси воздушного судна 2, как направление, соответствующее максимальному значению полученного пространственного спектра
направления на передатчик m-ой ССПР 1m, относительно строительной оси воздушного судна 2, как направление, соответствующее максимальному значению полученного пространственного спектра
 . (15)
. (15)
4.6. Определяется оценка азимута  прихода сигнала передатчика
прихода сигнала передатчика
m-ой ССПР 1m как сумма оценок курсового угла и направления на m-ую ССПР 1m
 . (16)
. (16)
4.7. Определяется оценка планарных координат воздушного судна 2 угломерным методом путем решения системы уравнений, связывающих планарные координаты воздушного судна 2, оценочные значения азимута прихода сигнала каждой m-ой ССПР 1m и известные планарные координаты ССПР 1m , для чего:
- составляется система уравнений для M ССПР 1m
 ; (17)
; (17)
- преобразуется полученная система к виду

……………………
 ; (18)
; (18)
…………………….

- записывается в матричном виде преобразованная система
AP=B, (19)
где
 ,
,  ,
,  ; (20)
; (20)
- умножаются на матрицу АТ (Т - индекс транспонирования) обе части уравнений системы
ATAP=ATB; (21)
- решением системы уравнений является вектор Р
P=A†B, (22)
где A†=[ATA]-1AT - псевдообратная матрица;
- элементами вектора Р являются искомые оценки планарных координат воздушного судна 2  .
.
Оценка эффективности предложенного способа проведена методом численного имитационного моделирования.
Параметры антенной решетки 5.1 приемного устройства НАСП, использованные при моделировании, приведены в таблице 1 на фиг. 8.
Исходные данные моделирования (количество и координаты ССПР 1m, координаты истинного положения воздушного судна 2) представлены в таблице 2 на фиг. 9.
Результаты моделирования (оценочные значения азимута прихода сигналов от ССПР 1m, оценочные значения координат воздушного судна 2) представлены в таблице 3 на фиг. 10.
Графически результаты численного имитационного моделирования определения координат воздушной судна 2 приведены на фиг. 11, где передатчики ССПР 1m показаны черными квадратами, истинное положение воздушного судна 2 показано черным кружком, а оценочное положение воздушного судно 2 обозначено звездой.
Анализ фиг. 10 и фиг. 11 показывает, что предложенный способ обеспечивает определение координат воздушного судна по сигналам несинхронизированных передатчиков помех глобальным навигационным спутниковым системам с высокой точностью. Радиальное отклонение оценочного местоположения воздушного судна от его истинного местоположения по результатам численного имитационного моделирования составило значение 290 м.
Таким образом, предложенный способ определения координат воздушного судна по сигналам несинхронизированных передатчиков помех глобальным навигационным спутниковым системам обеспечивает определение координат воздушного судна без реализации дополнительного режима начальной синхронизации НАСП.
Разработанный способ обеспечивает точность позиционирования воздушного судна 300 м на удалении 55 км от передатчиков ССПР, при ширине базы передатчиков ССПР 30 км и погрешности пеленгования не более 0,5°.
Источники информации
1. ГЛОНАСС. Принципы построения и функционирования / Под ред. А.И. Перова, В.Н. Харисова. Изд. 4-е. перераб. и доп. - М.: Радиотехника, 2010. 800 с., ил.
2. Патент № 2770127 РФ, МПК G01C 21/00. Способ локальной радионавигации по сигналам несинхронизированных отечественных средств радиоэлектронного подавления глобальных навигационных спутниковых систем / В.В. Кирюшкин (РФ) и др.; Акционерное общество научно-внедренческое предприятие «ПРОТЕК» (РФ). - № 2021123915; заявлено 12.08.2021, опубл. 14.04.2022, бюл. № 11. - 14 с., 4 ил.
| название | год | авторы | номер документа |
|---|---|---|---|
| Навигационная аппаратура санкционированного потребителя с возможностью локальной навигации по сигналам несинхронизированных отечественных средств радиоэлектронного подавления глобальных навигационных спутниковых систем | 2021 |
|
RU2771435C1 |
| Способ локальной радионавигации по сигналам несинхронизированных отечественных средств радиоэлектронного подавления глобальных навигационных спутниковых систем | 2021 |
|
RU2770127C1 |
| Пространственно-распределенная система радиоподавления НАП ГНСС с функцией альтернативного координатно-временного обеспечения для санкционированных потребителей | 2017 |
|
RU2649407C1 |
| ПРОСТРАНСТВЕННО-РАСПРЕДЕЛЕННЫЙ КОМПЛЕКС СРЕДСТВ СОЗДАНИЯ РАДИОПОМЕХ | 2014 |
|
RU2563972C1 |
| СИСТЕМА РАДИОПОДАВЛЕНИЯ НАВИГАЦИОННОЙ АППАРАТУРЫ ПОТРЕБИТЕЛЕЙ ГНСС ПРОТИВНИКА, СОВМЕСТИМАЯ С ОТЕЧЕСТВЕННОЙ АППАРАТУРОЙ ПОТРЕБИТЕЛЕЙ ГНСС | 2013 |
|
RU2539563C1 |
| Устройство пространственной селекции сигналов с компенсацией преднамеренных помех | 2018 |
|
RU2677931C1 |
| Способ определения плановых координат воздушной цели с помощью многопозиционной радиолокационной системы, встроенной в пространственно-распределенную систему радиопомех | 2023 |
|
RU2810525C1 |
| Пространственно-распределительный комплекс создания радиопомех навигационной аппаратуре потребителей глобальных навигационных систем с многофункциональным использованием радиоэлектронного оборудования | 2015 |
|
RU2616286C1 |
| Временной компенсатор для обеспечения электромагнитной совместимости отечественного передатчика радиопомех НАП ГНСС противника с отечественной НАП ГНСС при их одновременной работе на совпадающих частотах | 2016 |
|
RU2608585C1 |
| УСТРОЙСТВО СОЗДАНИЯ ПРЕДНАМЕРЕННЫХ ПОМЕХ ГЛОБАЛЬНЫМ НАВИГАЦИОННЫМ СПУТНИКОВЫМ СИСТЕМАМ | 2024 |
|
RU2828474C1 |
Изобретение относится к области радионавигации в условиях радиоэлектронной борьбы и может быть использовано при разработке системы локальной радионавигации (ЛРН) по сигналам несинхронизированных отечественных средств радиоэлектронного подавления глобальных навигационных спутниковых систем (ГНСС). Технический результат заключается в определении координат воздушного судна по помеховым сигналам несинхронизированных передатчиков помех глобальным навигационным спутниковым системам без реализации дополнительного режима начальной синхронизации навигационной аппаратуры санкционированных потребителей (НАСП). В заявленном способе в НАСП применяется измеритель курса, обеспечивающий измерение курсового угла между направлением на север и строительной осью воздушного судна, и приемное устройство, состоящее из K антенн, образующих антенную решетку, ориентированную относительно строительной оси воздушного судна, K приемников, K аналого-цифровых преобразователей, K цифровых М-канальных корреляторов, цифрового вычислителя, синтезатора частот, постоянного запоминающего устройства. Приемное устройство обеспечивает независимую обработку суммарного помехового сигнала передатчиков помех всех станций создания преднамеренных радиопомех (ССПР) в каждом k-м канале, корреляционную обработку цифрового суммарного сигнала в каждом k-м цифровом корреляторе приемного устройства с определением оценок фазы сигнала передатчика каждой m-й ССПР в момент регистрации отклика в каждом k-м канале, формирование векторов-столбцов коэффициентов, обусловленных сдвигом фаз в центральном и в каждом периферийном канале приемного устройства. Предварительно формируют матрицу направленности антенной решетки, зависящую от ее геометрических параметров и определяющую сдвиги фаз сигналов в каждой периферийной антенне относительно сигнала в центральной антенне при приходе сигнала с заданного направления. Далее проводят оценку направления на каждую m-ю ССПР относительно строительной оси воздушного судна по максимальному значению пространственного спектра, получаемого путем перемножения матрицы направленности антенной решетки и вектора-столбца коэффициентов, обусловленных сдвигом фаз откликов сигналов передатчика соответствующей m-й ССПР, оценку азимута прихода сигнала передатчика m-й ССПР, оценку планарных координат воздушного судна угломерным методом путем решения системы уравнений, связывающих планарные координаты воздушного судна, оценочные значения азимута  прихода сигнала каждого m-го передатчика помех и известные планарные координаты передатчиков помех. 11 ил.
прихода сигнала каждого m-го передатчика помех и известные планарные координаты передатчиков помех. 11 ил.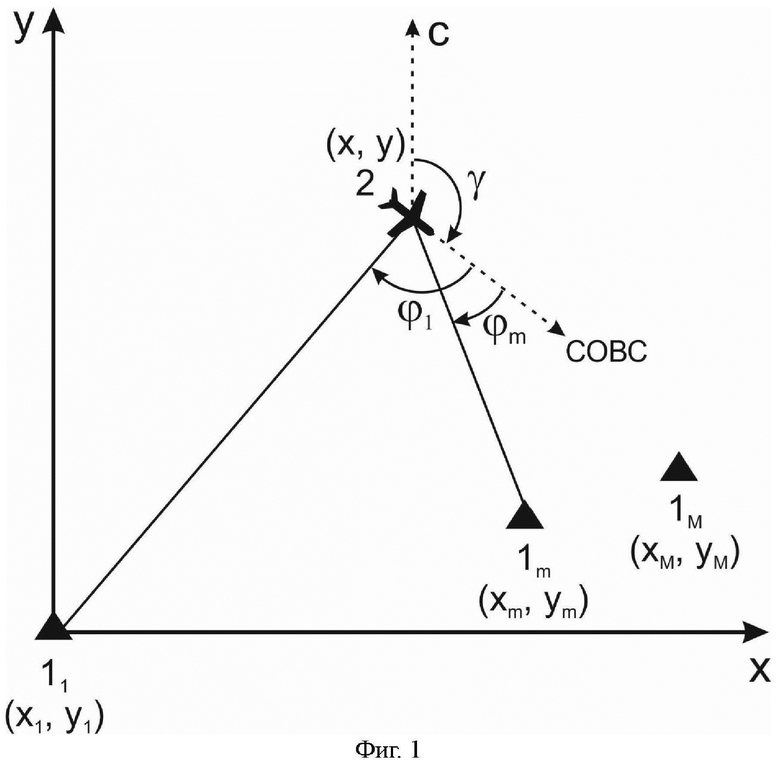
Способ определения координат воздушного судна по сигналам несинхронизированных передатчиков помех глобальным навигационным спутниковым системам, использующий пространственно-распределенную систему радиоподавления навигационной аппаратуры потребителей с функцией альтернативного координатно-временного обеспечения для санкционированных потребителей в пределах зоны действия пространственно-распределенной системы радиоподавления, состоящую из M станций создания преднамеренных радиопомех (ССПР) и санкционированных потребителей, имеющих навигационную аппаратуру санкционированных потребителей (НАСП), в которой ССПР не синхронизированы между собой и не синхронизированы с НАСП, а для решения задачи локальной радионавигации осуществляется ввод в НАСП информации о структуре сигналов и координатах ССПР с использованием съемного защищенного носителя информации, отличающийся тем, что в НАСП применяется измеритель курса, обеспечивающий измерение курсового угла между направлением на север и строительной осью воздушного судна, и K-канальное приемное устройство, состоящее из K антенн (k=1, 2, …, K), образующих антенную решетку, ориентированную относительно строительной оси воздушного судна, K приемников, K цифровых М-канальных корреляторов, цифрового вычислителя (ЦВ), синтезатора частот (СЧ), постоянного запоминающего устройства (ПЗУ) и обеспечивающее:
- независимую обработку суммарного помехового сигнала передатчиков помех всех ССПР в каждом k-м (k=1…K) канале приемного устройства (прием, усиление, преобразование на нулевую частоту, формирование комплексных отсчетов цифрового суммарного сигнала на нулевой частоте);
- независимую корреляционную обработку цифрового суммарного сигнала в каждом k-м цифровом корреляторе приемного устройства в M цифровых фильтрах, согласованных с ПСП передатчиков ССПР, с определением оценок фазы сигнала передатчика каждой m-й ССПР в момент регистрации отклика в каждом k-м канале;
- формирование векторов-столбцов коэффициентов, обусловленных сдвигом фаз откликов сигнала передатчика каждой m-й ССПР, зарегистрированных в центральном и в каждом периферийном канале приемного устройства;
- предварительное формирование и хранение в ПЗУ матрицы направленности антенной решетки, зависящей от ее геометрических параметров и определяющей сдвиги фаз сигналов в каждой периферийной антенне относительно сигнала в центральной антенне при приходе сигнала с заданного направления;
- оценку направления на каждую m-ю ССПР относительно строительной оси воздушного судна как направление, соответствующее максимальному значению пространственного спектра, получаемого путем перемножения матрицы направленности антенной решетки и вектора-столбца коэффициентов, обусловленных сдвигом фаз откликов сигналов передатчика соответствующей m-й ССПР, зарегистрированных в центральном и в каждом периферийном канале приемного устройства;
- оценку азимута прихода сигнала передатчика m-й ССПР как сумму оценок курсового угла и направления на m-ю ССПР;
- оценку планарных координат воздушного судна угломерным методом путем решения системы уравнений, связывающих планарные координаты воздушного судна, оценочные значения азимута  прихода сигнала каждого m-го передатчика помех и известные планарные координаты передатчиков помех.
прихода сигнала каждого m-го передатчика помех и известные планарные координаты передатчиков помех.
| Способ локальной радионавигации по сигналам несинхронизированных отечественных средств радиоэлектронного подавления глобальных навигационных спутниковых систем | 2021 |
|
RU2770127C1 |
| Способ определения плановых координат воздушного судна по измерениям пеленга неизвестного источника помехового излучения | 2021 |
|
RU2771439C1 |
| ЛОКАЛЬНАЯ ФАЗОВАЯ РАЗНОСТНО-ДАЛЬНОМЕРНАЯ РАДИОНАВИГАЦИОННАЯ СИСТЕМА | 2015 |
|
RU2604652C2 |
| Пространственно-распределенная система радиоподавления НАП ГНСС с функцией альтернативного координатно-временного обеспечения для санкционированных потребителей | 2017 |
|
RU2649407C1 |
| КИРЮШКИН В.В., БАБУСЕНКО С.И., ЖУРАВЛЕВ А.В., СМОЛИН А.В | |||
| Определение плановых координат воздушного судна по измерениям пеленга неизвестного источника помехового излучения // Радиотехника | |||
| Способ получения продуктов конденсации фенолов с формальдегидом | 1924 |
|
SU2022A1 |
| Т | |||
| Пюпитр для работы на пишущих машинах | 1922 |
|
SU86A1 |
| Способ восстановления хромовой кислоты, в частности для получения хромовых квасцов | 1921 |
|
SU7A1 |
| С | |||
| Домовый номерной фонарь, служащий одновременно для указания названия улицы и номера дома и для освещения прилежащего участка улицы | 1917 |
|
SU93A1 |
| DOI: | |||
