Изобретение относится к области авиационной техники, а именно к интегрированным комплексам бортового оборудования беспилотных летательных аппаратов.
Известен интегрированный комплекс бортового оборудования беспилотного летательного аппарата (БПЛА) [1], содержащий взаимосоединенные по мультиплексному каналу информационного обмена (МКИО) и по каналу информационного обмена (КИО) системы: комплекс пилотажно-навигационного оборудования (КПНО) в составе антенной системы спутниковых навигационных систем (АС СНС), инерциальной навигационной системы (ИНС), радиотехнической системы навигации и посадки (РТСНП), системы спутниковой навигации и посадки (ССНП) и системы измерения радиовысоты (СИР); комплекс средств связи (КСС) с радиоканалами различного диапазона длин волн в составе первой информационно-командной радиолинии, включающей первый блок управления и сопряжения, радиостанцию, первую антенную систему и первую видеосистему, второй информационно-командной радиолинии, включающей второй блок управления и сопряжения, радиостанцию, вторую антенную систему, вторую видеосистему и блок обработки видеосигналов, и командного радиоканала, включающего третий блок управления и сопряжения, радиостанцию и третью антенную систему; информационно-управляющую систему, включающую бортовую цифровую вычислительную машину (БЦВМ), блок-коммутатор сигналов и внешнее запоминающее устройство; общесамолетное оборудование; комплексную систему автоматического управления движением (КСУ); систему контроля и регистрации параметров полета и работы бортового оборудования; а также содержащий связанные между собой, с комплексами и с БЦВМ по КИО, пилотажное аэрометрическое оборудование и самолетный ответчик управления воздушным движением с антенной системой, обеспечивающей взаимодействие с органами управления воздушным движением, прием данных дифференциальных поправок от наземной станции, измерение отклонений от центра равносигнальной зоны пространственного радиополя.
Комплекс пилотажно-навигационного оборудования КПНО, входящий в состав известного интегрированного комплекса бортового оборудования, обеспечивает формирование пилотажно-навигационных параметров и передачу их в КСУ и БЦВМ для управления движением и для навигационных расчетов.
Работа комплекса пилотажно-навигационного оборудования КПНО в составе известного интегрированного комплекса бортового оборудования в условиях отсутствия радиопомех осуществляется следующим образом.
Антенная система спутниковых навигационных систем обеспечивает комплекс пилотажно-навигационного оборудования спутниковыми сигналами глобальных навигационных спутниковых систем (ГНСС) ГЛОНАСС и GPS.
Инерциальная навигационная система формирует информацию об угловом и пространственном положении, параметрах скорости БПЛА, а также осуществляет определение координат БПЛА методом счисления пути c коррекцией по сигналам ГНСС.
Радиотехническая система навигации и посадки формирует навигационную информацию по сигналам наземных радиомаяков, в том числе, и при выполнении посадки.
Система спутниковой навигации и посадки формирует информацию о местоположении, отклонении от траектории посадки по спутниковым сигналам, обеспечивает устранение ошибок измерения псевдодальностей с использованием корректирующих сигналов (дифференциальных поправок), которые формируются в наземной локальной контрольно-корректирующей станции (ЛККС) и через антенную систему поступают в систему спутниковой навигации и посадки.
Система измерения радиовысоты формирует измерения текущей истиной высоты БПЛА.
Системы комплекса пилотажно-навигационного оборудования сопрягаются с бортовой цифровой вычислительной машиной и комплексной системой управления по мультиплексному каналу информационного обмена и по каналу информационного обмена. Для обеспечения комплексной системы управления навигационной и пилотажной информацией при отказе бортовой цифровой вычислительной машины введено сопряжение систем комплекса пилотажно-навигационного оборудования с комплексной системой управления по каналу информационного обмена и по резервному каналу информационного обмена навигационной информацией.
Таким образом, комплекс пилотажно-навигационного оборудования КПНО в составе известного интегрированного комплекса бортового оборудования в условиях отсутствия радиопомех обеспечивает формирование пилотажно-навигационных параметров и передачу их в комплексную систему управления и в бортовую цифровую вычислительную машину по мультиплексному каналу информационного обмена, по каналу информационного обмена и по резервному каналу информационного обмена навигационной информацией для обеспечения управления движением БПЛА и для навигационных расчетов координат и пространственного положения БПЛА.
Однако, опыт современных военных конфликтов показал, что полет БПЛА в преобладающем большинстве случаев осуществляется в условиях воздействия преднамеренных радиопомех. При этом воздействию радиопомех подвергаются, в первую очередь, системы высокоточной спутниковой радионавигации, а также системы связи, системы управления и системы ближней радионавигации и посадки. В этих условиях функционирование радиотехнических систем радионавигации, каналов связи и управления БПЛА будет нарушено. При этом коррекция инерциальной навигационной системы осуществляться не будет, а при отсутствии коррекции инерциальной навигационной системы от радиотехнических систем радионавигации инерциальная навигационная система будет накапливать ошибку, что может привести к критическим отклонениям БПЛА от заданного маршрута полета и, в конечном итоге, к потере БПЛА.
Таким образом, недостатком известного интегрированного комплекса бортового оборудования беспилотного летательного аппарата является невозможность обеспечения комплексом пилотажно-навигационного оборудования высокоточного позиционирования БПЛА в условиях воздействия радиопомех на системы высокоточной спутниковой радионавигации, а также системы связи, системы управления и системы ближней радионавигации и посадки.
Указанный недостаток обусловлен:
- низкой помехоустойчивостью радиотехнических навигационных систем комплекса пилотажно-навигационного оборудования (системы спутниковой навигации и посадки и радиотехнической системы навигации и посадки), функционирование которых в условиях постановки преднамеренных радиопомех будет нарушено;
- низкой точностью нерадиотехнической инерциальной навигационной системы комплекса пилотажно-навигационного оборудования в условиях отсутствия коррекции от радиотехнических навигационных систем.
Устранение этого недостатка может быть обеспечено за счет применения в составе комплекса пилотажно-навигационного оборудования интегрированного комплекса бортового оборудования беспилотного летательного аппарата приемоизмерителя (ПИ) наземной длинноволновой радиотехнической системы дальней навигации (РСДН). Постановка радиопомех для ПИ РСДН (аппаратуры потребителей) на ее рабочей частоте 100 кГц не рациональна, поскольку на значительном удалении от аппаратуры потребителей для ее подавления требуется использование передатчиков радиопомех, мощность которых соизмерима с мощностью передатчиков наземных радиомаяков радионавигационной системы: от 10 кВт – для мобильного исполнения до 1 МВт – для стационарного исполнения, что требует соответствующей мощности источников электропитания, кратно превышающей мощность передатчиков радиопомех, и громоздких антенно-мачтовых сооружений, высота которых для обеспечения значений коэффициента полезного действия хотя бы единицы процентов должна быть соизмерима с длиной излучаемой радиоволны (порядка 3 километров) и достигает в реализованных конструкциях 400 м. Кроме того, несанкционированное развертывание даже мобильных передатчиков радиопомех в пределах рабочей зоны РСДН нереально с учетом мероприятий по охране и обороне критически важной территории страны или крупной группировки войск.
Известны комплексы пилотажно-навигационного оборудования пилотируемых летательных аппаратов, в состав которых входит ПИ РСДН, измерения которого используются для коррекции инерционной навигационной системы [2, с. 12, с. 35-40]. Однако, применение известных авиационных самолетных ПИ РСДН типа А-711, А-720, А-723 [3, с. 261-266; 4, с. 27-76] на БПЛА не представляется возможным по причине их больших массогабаритных параметров.
Известны малогабаритные ПИ РСДН, но они предназначены для установки на наземных мобильных средствах [5, с. 118-146].
Технический результат предлагаемого изобретения заключается в обеспечении высокоточного позиционирования БПЛА в условиях воздействия радиопомех на системы высокоточной спутниковой радионавигации, а также системы связи, системы управления и системы ближней радионавигации и посадки.
Технический результат изобретения достигается тем, что в комплекс пилотажно-навигационного оборудования интегрированного комплекса бортового оборудования БПЛА дополнительно введены: антенная система радиотехнической системы дальней навигации и малогабаритный приемоизмеритель радиотехнической системы дальней навигации, соединенные между собой радиочастотным кабелем, при этом малогабаритный приемоизмеритель радиотехнической системы дальней навигации сопряжен с бортовой цифровой вычислительной машиной по каналу информационного обмена, а с комплексной системой управления - по резервному каналу информационного обмена навигационной информацией, что в условиях радиопомех обеспечивает высокоточное определение координат БПЛА в малогабаритном приемоизмерителе радиотехнической системы дальней навигации работающем в режиме дифференциальной коррекции с использованием поправок к измерениям, предварительно вычисленными в малогабаритном приемоизмерителе радиотехнической системы дальней навигации на основе координатной информации от системы спутниковой навигации и посадки в момент отсутствия радиопомех.
Сущность изобретения поясняется рисунками.
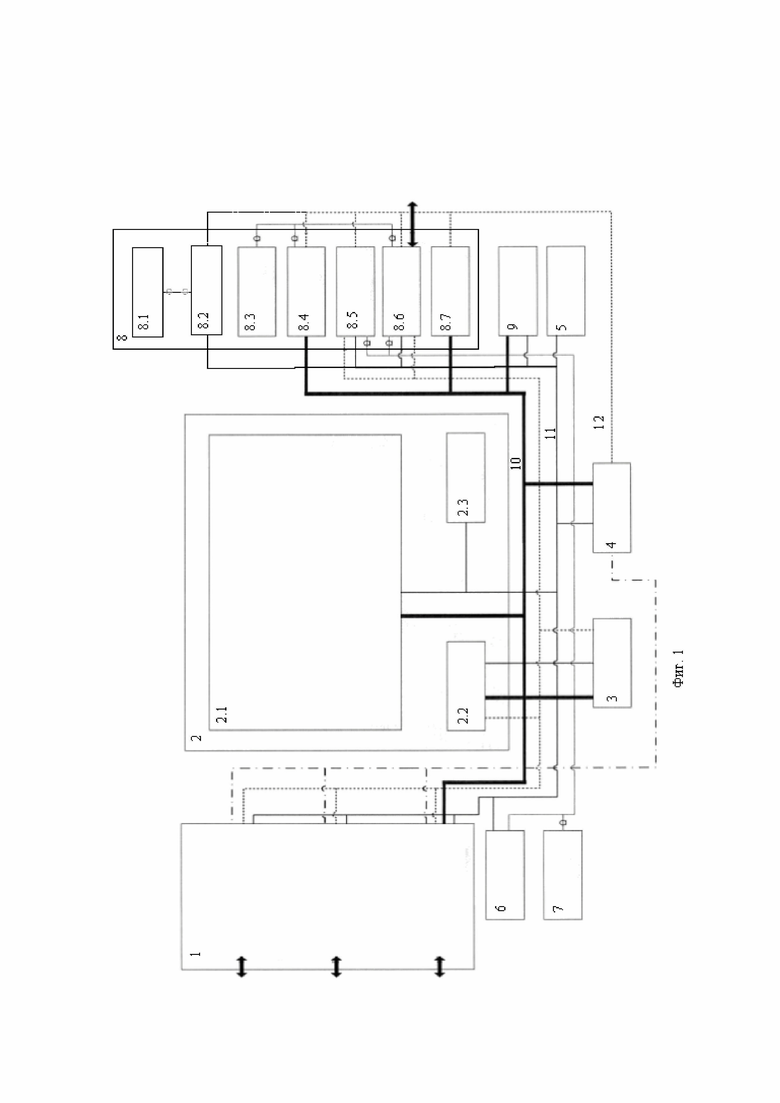
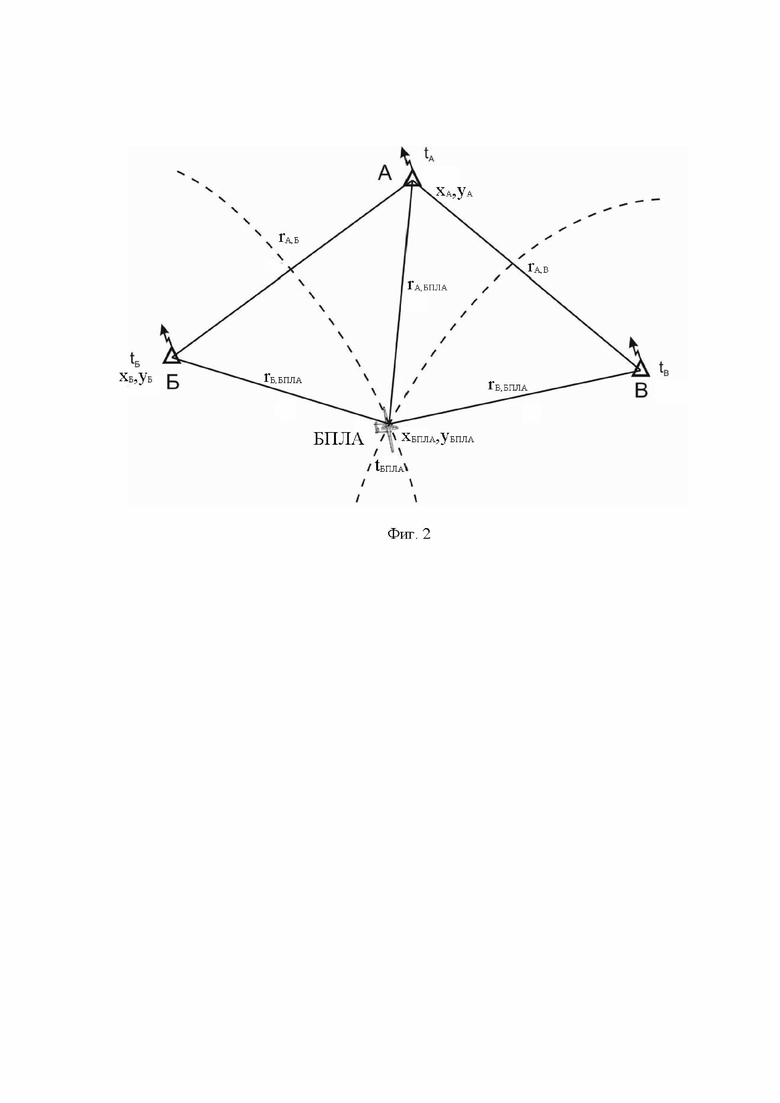
На фиг. 1 приведена структурная схема интегрированного комплекса бортового оборудования беспилотного летательного аппарата, на фиг. 2 показан принцип дифференциальной коррекции измерений приемоизмерителя наземной длинноволновой радиотехнической системы дальней навигации.
Интегрированный комплекс бортового оборудования беспилотного летательного аппарата состоит из комплекса связи с радиоканалами различного диапазона 1, информационно-управляющей системы 2, общесамолетного оборудования 3; комплексной системы управления 4; пилотажного аэрометрического оборудования 5; самолетного оборудования управления воздушным движением 6 с антенной системой 7; комплекса пилотажно-навигационного оборудования 8, системы контроля и регистрации параметров 9, взаимосоединенные по мультиплексному каналу информационного обмена 10, по каналу информационного обмена 11 и по резервному каналу информационного обмена навигационной информацией 12.
Информационно-управляющая система 2, включает с себя бортовую цифровую вычислительную машину 2.1, блок-коммутатор сигналов 2.2 и внешнее запоминающее устройство 2.3.
Комплекс пилотажно-навигационного оборудования 8, включает в себя антенную систему радиотехнической системы дальней навигации 8.1, малогабаритный приемоизмеритель радиотехнической системы дальней навигации 8.2, антенную систему спутниковых навигационных систем 8.3, инерциальную навигационную систему 8.4, радиотехническую систему навигации и посадки 8.5, систему спутниковую навигации и посадки 8.6, систему измерения радиовысоты 8.7. При этом инерциальная навигационная система 8.4 и система измерения радиовысоты 8.7 имеют взаимосоединение по мультиплексному каналу информационного обмена 10; малогабаритный приемоизмеритель радиотехнической системы дальней навигации 8.2, радиотехническая система навигации и посадки 8.5, система спутниковая навигации и посадки 8.6 имеют взаимосоединение по каналу информационного обмена 11; малогабаритный приемоизмеритель радиотехнической системы дальней навигации 8.2, инерциальная навигационная система 8.4, радиотехническая система навигации и посадки 8.5, система спутниковая навигации и посадки 8.6, система измерения радиовысоты 8.7 имеют взаимосоединение по резервному каналу информационного обмена навигационной информацией 12.
В условиях отсутствия радиопомех, комплекс пилотажно-навигационного оборудования 8 интегрированного комплекса бортового оборудования беспилотного летательного аппарата, работает следующим образом.
Антенная система спутниковых навигационных систем 8.3 обеспечивает: прием навигационных сигналов глобальных навигационных спутниковых систем ГЛОНАСС и GPS; трансляцию их по радиочастотным кабелям в спутниковую систему навигации и посадки 8.6 для высокоточного определения координат и скорости движения БПЛА, и в инерциальную навигационную систему 8.4 для коррекции ошибок счисления пути.
Инерциальная навигационная система 8.4 формирует информацию об угловом положении и параметрах скорости летательного аппарата, а также осуществляет определение координат БПЛА методом счисления пути с коррекцией по сигналам глобальной навигационной спутниковой системы, поступающим от антенной системы спутниковых навигационных систем 8.3 по радиочастотному кабелю. Инерциальная навигационная система 8.4 сопрягается с бортовой цифровой вычислительной машиной 2.1 по мультиплексному каналу информационного обмена 10, а с комплексной системой управления 4 - по мультиплексному каналу информационного обмена 10 и по резервному каналу информационного обмена навигационной информации 12.
Радиотехническая система навигации и посадки 8.5 в режиме навигации формирует навигационную информацию о местоположении БПЛА по сигналам от наземных радиомаяков радиотехнических систем ближней навигации, принимаемым антенной системой 3 и транслируемым в радиотехническую систему навигации и посадки 8.5 по радиочастотному кабелю. В режиме посадки радиотехническая система навигации и посадки 8.5 формирует информацию об отклонении БПЛА от курса и глиссады планирования при выполнении посадки БПЛА по сигналам от наземной курсо-глиссадной радиомаячной системы посадки. Радиотехническая система навигации и посадки 8.5 сопрягается с бортовой цифровой вычислительной машиной 2.1 по каналу информационного обмена 11, а с комплексной системой управления 4 - по каналу информационного обмена 11 и по резервному каналу информационного обмена навигационной информации 12.
Система спутниковой навигации и посадки 8.6 в режиме навигации формирует информацию о местоположении БПЛА по навигационным сигналам ГНСС ГЛОНАСС и GPS, принимаемым антенной системой спутниковых навигационных систем 8.3 и транслируемым в систему спутниковой навигации и посадки 5.6 по радиочастотному кабелю. В режиме посадки система спутниковой навигации и посадки 8.6 формирует информацию об отклонении БПЛА от траектории посадки, для чего используются навигационные сигналы ГНСС, поступающие от антенной системы спутниковых навигационных систем 8.3, и корректирующие сигналы (дифференциальные поправки), которые формируются и излучаются наземной ЛККС, принимаются антенной системой 7 и транслируются в систему спутниковой навигации и посадки 8.6 по радиочастотному кабелю. Система спутниковой навигации и посадки 8.6 сопрягается с бортовой цифровой вычислительной машиной 2.1 по каналу информационного обмена 11, а с комплексной системой управления 4 - по каналу информационного обмена 11 и по резервному каналу информационного обмена навигационной информации 12.
Система измерения радиовысоты 8.7 формирует информацию о текущей истиной высоте БПЛА на основе измеренных значений задержки между излученным зондирующим сигналом и принятым зондирующим сигналом, отраженным от земной поверхности. Система измерения радиовысоты 8.7 сопрягается с бортовой цифровой вычислительной машиной 2.1 по мультиплексному каналу информационного обмена 10, а с комплексной системой управления 4 - по мультиплексному каналу информационного обмена 10 и по резервному каналу информационного обмена навигационной информацией 12.
Антенная система радиотехнической системы дальней навигации 8.1 обеспечивает прием навигационных сигналов наземных радионавигационных станций (радиомаяков) радиотехнической системы дальней навигации на рабочей частоте 100 кГц и их трансляцию по радиочастотному кабелю в малогабаритный приемоизмеритель радиотехнической системы дальней навигации 8.2.
Малогабаритный приемоизмеритель радиотехнической системы дальней навигации 8.2 обеспечивает усиление и обработку навигационных сигналов наземных радиомаяков радиотехнической системы дальней навигации, измерение разностей задержек навигационных сигналов ведущей А и ведомых Б, В наземных радиомаяков радиотехнической системы дальней навигации и вычисление на их основе координат местоположения БПЛА. Малогабаритный приемоизмеритель радиотехнической системы дальней навигации 8.2 сопрягается с бортовой цифровой вычислительной машиной 2.1 и комплексной системой управления 4 по каналу информационного обмена 11 и по резервному каналу информационного обмена навигационной информацией 12.
Основным навигационным каналом в комплексе пилотажно-навигационного оборудования 8 является инерционная навигационная система 8.3, корректируемая по сигналам ГНСС. Навигационная информация от инерционной навигационной системы 8.3 поступает в бортовую цифровую вычислительную машину 2.1 по мультиплексному каналу информационного обмена 10 и в качестве резерва в комплексную систему управления 4 по резервному каналу информационного обмена навигационной информацией 12.
Высокоточная информация о местоположении БПЛА от системы спутниковой навигации и посадки 8.6 выдается в бортовую цифровую вычислительную машину 2.1 по каналу информационного обмена 11 и в комплексной системе управления 4 по резервному каналу информационного обмена навигационной информацией 12.
При наличии сигналов наземных радиомаяков радиотехнической системы ближней навигации информация о местоположении БПЛА от радиотехнической системы навигации и посадки 8.5 поступает в бортовую цифровую вычислительную машину 2.1 и комплексную систему управления 4.
При наличии сигналов наземных радиомаяков радиотехнической системы дальней навигации информация о местоположении БПЛА от малогабаритного приемоизмерителя радиотехнической системы дальней навигации 8.2 поступает в бортовую цифровую вычислительную машину 2.1 и комплексную систему управления 4.
Информация о текущей истиной высоте БПЛА из системы измерения радиовысоты 8.7 поступает в бортовую цифровую вычислительную машину 2.1 и комплексную систему управления 4.
Таким образом, в условиях отсутствия помех в бортовую цифровую вычислительную машину 2.1 и комплексную систему управления 4 поступает навигационная информация от всех пяти навигационных датчиков, которая может быть использована как автономные измерения от каждого датчика или комплексироваться по определенным алгоритмам.
При отсутствии помех и доступности сигналов ГНСС и сигналов радиотехнической системы дальней навигации в малогабаритном приемоизмерителе радиотехнической системы дальней навигации 8.2 осуществляется вычисление поправок к измерениям разности задержек навигационных сигналов наземных радиомаяков радиотехнической системы дальней навигации и последующая дифференциальная коррекция измерений радиотехнической системы дальней навигации в следующем порядке.
Ведущая радионавигационная станция А радиотехнической системы дальней навигации излучает навигационный сигнал в момент времени  (фиг. 2). Ведомая радионавигационная станция Б радиотехнической системы дальней навигации излучает навигационный сигнал в момент времени
(фиг. 2). Ведомая радионавигационная станция Б радиотехнической системы дальней навигации излучает навигационный сигнал в момент времени  , где
, где  - расстояние между ведущей А и ведомой Б станциями радиотехнической системы дальней навигации,
- расстояние между ведущей А и ведомой Б станциями радиотехнической системы дальней навигации,  - постоянная временная задержка ведомой станции Б,
- постоянная временная задержка ведомой станции Б,  - переменная кодовая временная задержка ведомой станции Б, v – скорость распространения радиоволн [6, с. 23-27].
- переменная кодовая временная задержка ведомой станции Б, v – скорость распространения радиоволн [6, с. 23-27].
В точку местоположения БПЛА сигнал ведущей станции А приходит в момент времени  , где
, где  - расстояние между ведущей станцией А и БПЛА.
- расстояние между ведущей станцией А и БПЛА.
В точку местоположения БПЛА сигнал ведомой станции Б приходит в момент времени  , где
, где  - расстояние между ведомой станцией Б и БПЛА.
- расстояние между ведомой станцией Б и БПЛА.
Значение задержки между моментами приема сигналов ведущей А и ведомой Б станций радиотехнической системы дальней навигации, измеренное в малогабаритном приемоизмерителе радиотехнической системы дальней навигации 8.2 БПЛА, будет складываться из следующих составляющих
 ,
,
где  - систематическая погрешность, обусловленная особенностями среды распространения навигационного сигнала и подстилающей поверхности на трассе распространения, а также ошибками синхронизации ведомой станции Б,
- систематическая погрешность, обусловленная особенностями среды распространения навигационного сигнала и подстилающей поверхности на трассе распространения, а также ошибками синхронизации ведомой станции Б,  - случайная погрешность измерения задержки в малогабаритном приемоизмерителе радиотехнической системы дальней навигации 8.2.
- случайная погрешность измерения задержки в малогабаритном приемоизмерителе радиотехнической системы дальней навигации 8.2.
Для вычисления поправки для коррекции измеренного значения  используется расчетное значение разности задержки навигационных сигналов ведомой Б и ведущей А станций, рассчитанное на основе известных значений координат ведущей А
используется расчетное значение разности задержки навигационных сигналов ведомой Б и ведущей А станций, рассчитанное на основе известных значений координат ведущей А  и ведомой Б
и ведомой Б  станций, введенных заранее в энергонезависимую память малогабаритного приемоизмерителя радиотехнической системы дальней навигации, а также наиболее точных оценок координат БПЛА, вычисленных в системе спутниковой навигации и посадки 8.6 по сигналам ГНСС
станций, введенных заранее в энергонезависимую память малогабаритного приемоизмерителя радиотехнической системы дальней навигации, а также наиболее точных оценок координат БПЛА, вычисленных в системе спутниковой навигации и посадки 8.6 по сигналам ГНСС  и поступающих в малогабаритный приемоизмеритель радиотехнической системы дальней навигации 8.2 по каналу информационного обмена 11 и по резервному каналу информационного обмена навигационной информацией 12
и поступающих в малогабаритный приемоизмеритель радиотехнической системы дальней навигации 8.2 по каналу информационного обмена 11 и по резервному каналу информационного обмена навигационной информацией 12
 .
.
Расчетное значение разности задержки навигационных сигналов будет зависеть от разности геометрических дальностей между БПЛА и ведомой Б станцией, между БПЛА и ведущей станцией А, а также от случайного параметра 
 .
.
В свою очередь, параметр зависит от точности оценки координат БПЛА, вычисленных в системе спутниковой навигации и посадки 8.6 по сигналам ГНСС
 ,
,
где  - истинные значения координат БПЛА.
- истинные значения координат БПЛА.
Корректирующая поправка рассчитывается как разность измеренного и расчетного значения разности времени задержки навигационных сигналов
 ,
,
и включает в себя как известные составляющие  , так и неизвестные слагаемые, связанные с систематическими
, так и неизвестные слагаемые, связанные с систематическими  и случайными
и случайными  и
и  погрешностями измерений.
погрешностями измерений.
Для коррекции измерений малогабаритного приемоизмерителя радиотехнической системы дальней навигации вычисленная поправка  вычитается из измеренного значения
вычитается из измеренного значения
 .
.
Аналогично рассчитывается корректирующая поправка и осуществляется коррекция измерений для другой пары станций радиотехнической системы дальней навигации: ведущая А – ведомая В
 ,
,
где  - расстояние между ведомой станцией В и БПЛА (фиг. 2).
- расстояние между ведомой станцией В и БПЛА (фиг. 2).
Скорректированные значения разностей задержки навигационных сигналов ведущей А и ведомых Б и В станций  и
и  содержат в себе слагаемые, определяемые только разностью геометрических расстояний между БПЛА и ведомой станцией, между БПЛА и ведущей станцией радиотехнической системы дальней навигации, а также неустранимые случайные погрешности измерений. При этом в результате коррекции устраняются неизвестные систематические погрешности измерений.
содержат в себе слагаемые, определяемые только разностью геометрических расстояний между БПЛА и ведомой станцией, между БПЛА и ведущей станцией радиотехнической системы дальней навигации, а также неустранимые случайные погрешности измерений. При этом в результате коррекции устраняются неизвестные систематические погрешности измерений.
На основе скорректированных измерений в малогабаритном приемоизмерителе радиотехнической системы дальней навигации 8.2 вычисляется местоположение БПЛА разностно-дальномерным методом как точка пересечения линий положения - гипербол, фокусами которых являются точки расположения ведущей и ведомой радиостанции радиотехнической системы дальней навигации, а разность расстояний от точки на линии положения до фокусов гиперболы соответствует скорректированному измерению (фиг. 2).
Использование скорректированных измерений для определения местоположения БПЛА в малогабаритном приемоизмерителе радиотехнической системы дальней навигации 8.2 в режиме дифференциальной коррекции обеспечивает повышение точности определения координат БПЛА до 10-50 м, что в 4-5 раз точнее позиционирования по сигналам радиотехнической системы дальней навигации в автономном режиме [3, с. 257].
В условиях отсутствия помех и доступности сигналов ГНСС вычисление поправок и коррекция измерений в малогабаритном приемоизмерителе радиотехнической системы дальней навигации 8.2 осуществляются постоянно.
В условиях преднамеренных радиопомех комплекс пилотажно-навигационного оборудования 8 интегрированного комплекса бортового оборудования беспилотного летательного аппарата работает следующим образом.
В условиях преднамеренных помех ГНСС прием навигационных сигналов ГНСС антенной системой спутниковых навигационных систем 8.3 будет невозможен. При этом нарушится коррекция инерциальной навигационной системы 8.4 по сигналам ГНСС, а также нарушится функционирование системы спутниковой навигации и посадки 8.6, что приведет к невозможности высокоточного позиционирования БПЛА по сигналам ГНСС.
При условии постановки дополнительных радиопомех радиотехническим системам ближней навигации и системам связи будет нарушено функционирование радиотехнической системы навигации и посадки 8.5, что приведет к невозможности позиционирования БПЛА по альтернативным системам локальной радионавигации, а также к невозможности управления БПЛА в «ручном режиме» путем передачи команд управления и сигналов телеметрии по каналам связи и управления комплекса средств связи с радиостанциями различного диапазона волн 1.
В этом случае позиционирование БПЛА будет осуществлять в малогабаритном приемоизмерителе радиотехнической системы дальней навигации 8.2, работающий в режиме дифференциальной коррекции.
В условиях преднамеренных помех и недоступности сигналов ГНСС вычисление поправок в малогабаритном ПИ РСДН будет невозможно, однако коррекция измерений в малогабаритном приемоизмерителе радиотехнической системы дальней навигации 8.2 будет осуществляться. При этом будут использоваться поправки, ранее вычисленные в малогабаритном приемоизмерителе радиотехнической системы дальней навигации 8.2 при отсутствии радиопомех.
Актуальность вычисленных поправок сохраняется в течение нескольких часов с момента вычисления поправок и на удалении нескольких сотен километров от точки их вычисления [3, с. 257; 7, с. 100], что соответствует средней продолжительности и протяженности полета БПЛА в условиях радиопомех.
Таким образом, в условиях преднамеренных радиопомех предложенный интегрированный комплекс бортового оборудования беспилотного летательного аппарата будет обеспечивать высокоточное (с погрешностью 10-50 м) определение координат БПЛА в малогабаритном приемоизмерителе радиотехнической системы дальней навигации 8.2 с использованием дифференциальных поправок, ранее вычисленных на борту БПЛА при отсутствии радиопомех. Значения вычисленных в малогабаритном приемоизмерителе радиотехнической системы дальней навигации 8.2 точных координат могут быть использованы в комплексе пилотажно-навигационного оборудования 8 для коррекции измерений инерциальной навигационной системы 8.4.
Источники информации
1. Интегрированный комплекс бортового оборудования беспилотного летательного аппарата: патент РФ на изобретение RU 2767938 / Стрелец М.Ю., Бибиков С.Ю., Грибов Д.И. и др.: 22.03.2022. Бюл. № 9.
2. Радиоэлектронные комплексы навигации, прицеливания и управления вооружением летательных аппаратов. Том 2. Применение авиационных радиоэлектронных комплексов при решении боевых и навигационных задач / Под ред. М.С. Ярлыкова. – М.: Радиотехника. 2012. – 256 с.
3. Радионавигационные системы воздушных судов: учебник / О.Н. Скрыпник. – М: ИНФРА-М. 2018.- 348 с.
4. Радионавигационные системы. Радиотехнические системы дальней навигации: учебное пособие / Неудакин А.А. – Воронеж: ВУНЦ ВВС «ВВА им. проф. Н.Е. Жуковского и Ю.А. Гагарина, 2014. 99 с.
5. Навигационные комплексы наземных мобильных средств военного назначения: монография / А.В. Журавлев. – Воронеж: Издательско-полиграфический центр «Научная книга», 2017. – 290 с.
6. Радиотехнические системы дальней навигации: учебное пособие / Иванов Е.А., Ларионов Л.А, Пивниченко М.А. и др. - М.: Военное издательство МО СССР. 1975. – 488 с.
7. Радионавигационные системы: учебник / Бакулев П.А., Сосновский А.А. – М.: Радиотехника, 2005. – 224 с.
| название | год | авторы | номер документа |
|---|---|---|---|
| Интегрированный комплекс бортового оборудования беспилотного летательного аппарата | 2019 |
|
RU2767938C2 |
| ДАЛЬНОМЕРНАЯ РАДИОТЕХНИЧЕСКАЯ СИСТЕМА БЛИЖНЕЙ НАВИГАЦИИ ЛЕТАТЕЛЬНЫХ АППАРАТОВ | 2011 |
|
RU2478979C1 |
| МНОГОПОЗИЦИОННЫЙ ИНТЕГРИРОВАННЫЙ КОМПЛЕКС БОРТОВОГО РАДИОЭЛЕКТРОННОГО ОБОРУДОВАНИЯ ЛЕГКОГО МНОГОЦЕЛЕВОГО САМОЛЕТА С ПОВЫШЕННЫМИ МАНЕВРЕННЫМИ ВОЗМОЖНОСТЯМИ | 2004 |
|
RU2252900C1 |
| Малогабаритное бортовое радиоэлектронное устройство для управления пилотажно-навигационным комплексом беспилотного летательного аппарата | 2021 |
|
RU2799748C2 |
| Комплекс бортового оборудования вертолетов и самолетов авиации общего назначения | 2016 |
|
RU2640076C2 |
| Пространственно-распределительный комплекс создания радиопомех навигационной аппаратуре потребителей глобальных навигационных систем с многофункциональным использованием радиоэлектронного оборудования | 2015 |
|
RU2616286C1 |
| Пилотажно-навигационная система транспортного летательного аппарата | 2024 |
|
RU2822088C1 |
| КОМПЛЕКС БОРТОВОГО РАДИОЭЛЕКТРОННОГО ОБОРУДОВАНИЯ ЛЕГКОГО МНОГОЦЕЛЕВОГО САМОЛЕТА | 2002 |
|
RU2215668C1 |
| Комплекс бортового оборудования вертолета | 2016 |
|
RU2652344C1 |
| Пространственно-распределенная система радиоподавления НАП ГНСС с функцией альтернативного координатно-временного обеспечения для санкционированных потребителей | 2017 |
|
RU2649407C1 |
Изобретение относится к интегрированным комплексам бортового оборудования беспилотных летательных аппаратов (БПЛА). Сущность предлагаемого технического решения заключается в том, что в интегрированный комплекс бортового оборудования БПЛА дополнительно введены: антенная система радиотехнической системы дальней навигации и малогабаритный приемоизмеритель радиотехнической системы дальней навигации, соединенные между собой радиочастотным кабелем. При этом малогабаритный приемоизмеритель радиотехнической системы дальней навигации сопряжен с бортовой цифровой вычислительной машиной по каналу информационного обмена, а с комплексной системой управления - по резервному каналу информационного обмена навигационной информацией. Малогабаритный измеритель выполнен с возможностью работы в режиме дифференциальной коррекции с использованием поправок к измерениям, предварительно вычисленным на основе координатной информации от системы спутниковой навигации и посадки при отсутствии радиопомех. Технический результат предлагаемого изобретения заключается в обеспечении высокоточного позиционирования БПЛА в условиях воздействия радиопомех на системы заявленного интегрированного комплекса. 2 ил.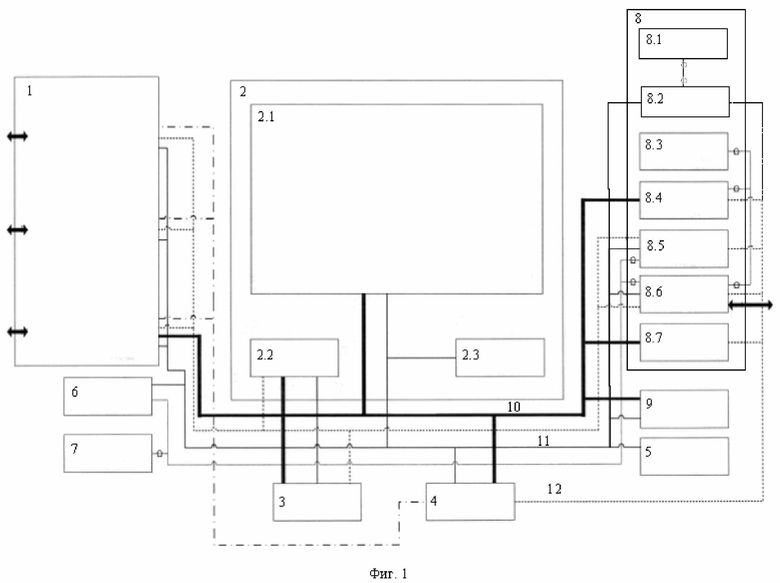
Интегрированный комплекс бортового оборудования беспилотного летательного аппарата (БПЛА), состоящий из взаимосоединенных по мультиплексному каналу информационного обмена, по каналу информационного обмена и по резервному каналу информационного обмена навигационной информацией систем: комплекса связи с радиоканалами различного диапазона; информационно-управляющей системы, включающей бортовую цифровую вычислительную машину, блок-коммутатор сигналов и внешнее запоминающее устройство; общесамолетного оборудования; комплексной системы управления; контроля и регистрации параметров; пилотажного аэрометрического оборудования; самолетного оборудования управления воздушным движением с антенной системой; комплекса пилотажно-навигационного оборудования, включающего антенную систему спутниковых навигационных систем, инерциальную навигационную систему, радиотехническую систему навигации и посадки, системы спутниковой навигации и посадки, систему измерения радиовысоты, отличающийся тем, что в комплекс пилотажно-навигационного оборудования дополнительно введены: антенная система радиотехнической системы дальней навигации и малогабаритный приемоизмеритель радиотехнической системы дальней навигации, соединенные между собой радиочастотным кабелем, а малогабаритный приемоизмеритель радиотехнической системы дальней навигации сопряжен с бортовой цифровой вычислительной машиной по каналу информационного обмена, а с комплексной системой управления - по резервному каналу информационного обмена навигационной информацией, что в условиях радиопомех обеспечивает высокоточное определение координат БПЛА в малогабаритном приемоизмерителе радиотехнической системы дальней навигации, работающем в режиме дифференциальной коррекции с использованием поправок к измерениям, предварительно вычисленным в малогабаритном приемоизмерителе радиотехнической системы дальней навигации на основе координатной информации от системы спутниковой навигации и посадки в момент отсутствия радиопомех.
| Интегрированный комплекс бортового оборудования беспилотного летательного аппарата | 2019 |
|
RU2767938C2 |
| ДРЕНОУКЛАДЧИК | 0 |
|
SU169910A1 |
| Пилотажно-навигационная система транспортного летательного аппарата | 2020 |
|
RU2749214C1 |
| US 0009423489 B2, 23.08.2016 | |||
| CN 102915038 A, 06.02.2013 | |||
| DE 202014104937 U1, 04.12.2014. | |||
