Ссылка на родственную заявку
Настоящая заявка заявляет преимущество приоритета согласно предварительной заявке на патент США 61/568224, зарегистрированной 8 декабря 2011 и целиком включенной в настоящий документ путем ссылки.
Область техники, к которой относится изобретение
Настоящее изобретение, в общем, относится к системам контроля и более конкретно к способу определения электрической проводимости объекта или материала.
Уровень техники
Некоторые известные измерительные системы измеряют электрическую проводимость исследуемого образца путем приведения электродов в контакт с образцом. На электроды подается напряжение и измеряется полученный ток. Затем по измеренному току вычисляют электрическую проводимость. В некоторых случаях, к образцу подключают множество электродов, чтобы обеспечить возможность формирования пространственной картины в случае, когда электрическая проводимость пространственно изменяется по образцу. Это последнее условие справедливо для геологических образцов и образцов человеческой ткани.
Альтернативой является создание в образце вихревых токов через индукционную связь с внешней катушкой. Вихревые токи прямо пропорциональны местной проводимости материала, и их можно определять множеством способов. Например, помещая катушку рядом с образцом, можно замерять количество электрической энергии, рассеянной в катушке.
Вихревые токи обычно генерируют с помощью щупа или датчика, который осциллирует, находясь в состоянии резонанса. В щуп может быть включен контур фазовой автоматической подстройки частоты (ФАПЧ) (PLL - от англ. «phase-locked-loop) для автоматической подстройки щупа, так чтобы щуп поддерживался в состоянии резонанса. Кроме того, такие щупы могут требовать дополнительных компонентов для поддержания резонансного состояния или для определения рассеянной энергии, например, пикового детектора и/или переменного сопротивления. Контур ФАПЧ и дополнительные компоненты могут нежелательным образом увеличивать размер и стоимость щупа.
Таким образом, остается необходимость в системах и способах для экономичного, точного и эффективного неразрушающего определения электрической проводимости объекта.
Раскрытие изобретения
В соответствии с настоящим изобретением в одном из его аспектов, система для определения электрической проводимости объекта, в общем, содержит датчик, способный излучать электромагнитное поле после получения возбуждающего сигнала, причем при помещении в это электромагнитное поле объекта, оно взаимодействует с этим объектом. Контур обработки сигнала соединен с датчиком и выполнен так, чтобы датчик имел регулируемую емкость с целью регулирования фазового угла тока, проходящего через датчик, что позволяет получить измерение напряжения, соответствующего напряжение на датчике, и получить измерение тока, соответствующего току, проходящему через датчик. С контуром обработки сигнала соединен контроллер, предназначенный для расчета комплексной проводимости датчика на основании измерения напряжения и измерения тока и для определения электрической проводимости объекта на основании рассчитанной комплексной проводимости датчика.
В соответствии с настоящим изобретением в другом его аспекте, способ определения электрической проводимости объекта, в общем, включает этапы, на которых: излучают электромагнитное поле в направлении объекта, так что это электромагнитное поле взаимодействует с объектом; регулируют фазовый угол тока, проходящего через датчик, при помощи регулируемого емкостного элемента, соединенного с датчиком; производят измерение напряжения, соответствующего напряжению на датчике, и измерение тока, соответствующего току, проходящему через датчик; рассчитывают комплексную проводимость датчика на основании измерения напряжения и измерения тока; и определяют электрическую проводимость объекта на основании рассчитанной комплексной проводимости датчика.
В соответствии с настоящим изобретением в еще одном его аспекте, контроллер для определения электрической проводимости объекта, в общем, содержит процессор и запоминающее устройство, соединенное с процессором. Запоминающее устройство предназначено для хранения множества программных модулей, включая модуль расчета фазового угла, выполняемый процессором для получения измерения тока, соответствующего току, проходящему через датчик, и расчета фазового угла тока, проходящего через датчик. Программные модули также включают модуль расчета комплексного сопротивления (импеданса), выполняемый процессором, где на вход поступает измерение тока и измерение напряжения, соответствующего напряжению на датчике, а на выходе рассчитывается комплексное сопротивление датчика на основании этих измерений тока и напряжения. Программные модули дополнительно включают модуль расчета комплексной проводимости, выполняемый процессором для расчета комплексной проводимости датчика на основании рассчитанного фазового угла и рассчитанного комплексного сопротивления, и модуль расчета электрической проводимости, выполняемый процессором для определения электрической проводимости объекта на основании рассчитанной комплексной проводимости датчика.
Краткое описание чертежей
Фиг. 1 изображает блок-схему системы контроля в соответствии с одним из вариантов осуществления настоящего изобретения, которую можно использовать для определения электрической проводимости объекта.
Фиг. 2А сверху изображает датчик, подходящий для использования с системой контроля по фиг. 1.
Фиг. 2 В схематично изображает контур, представляющий электрические характеристики датчика по фиг. 2А.
Фиг. 3 изображает блок-схему системы контроля по фиг. 1.
Фиг. 4 изображает схему соединений аналоговой части контура обработки сигнала, подходящего для использования с системой контроля по фиг. 3.
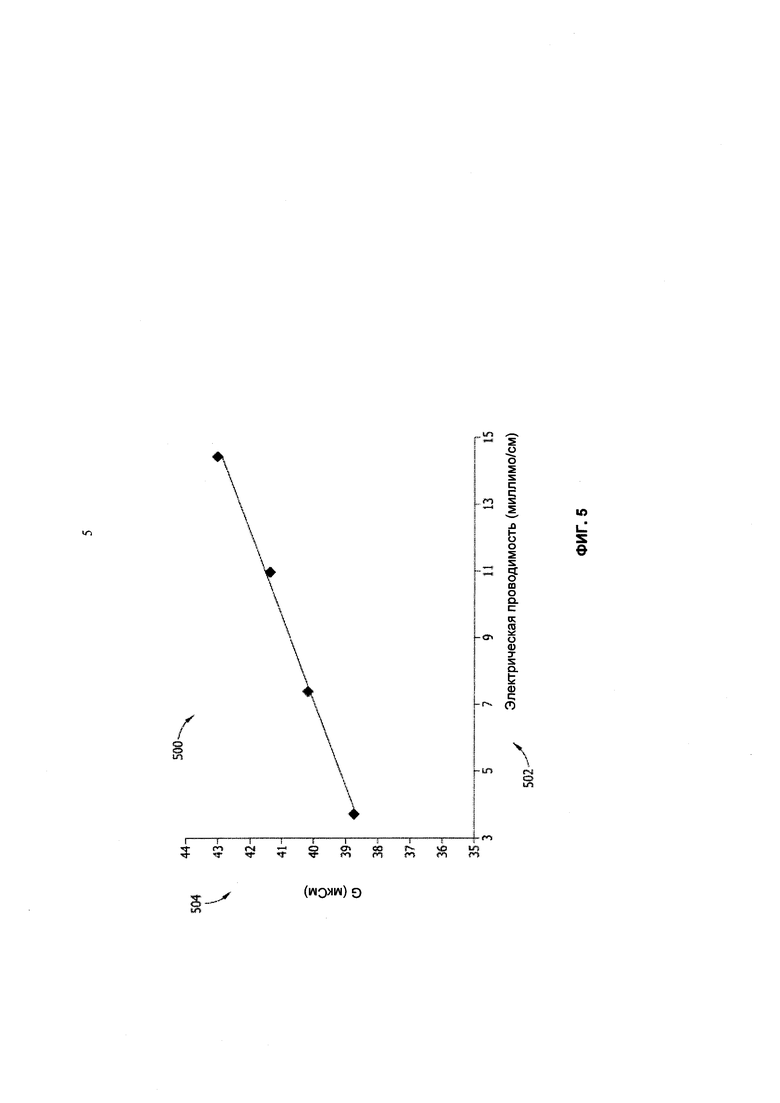
Фиг. 5 изображает график калибровочной кривой, которая может быть создана и использована системой контроля.
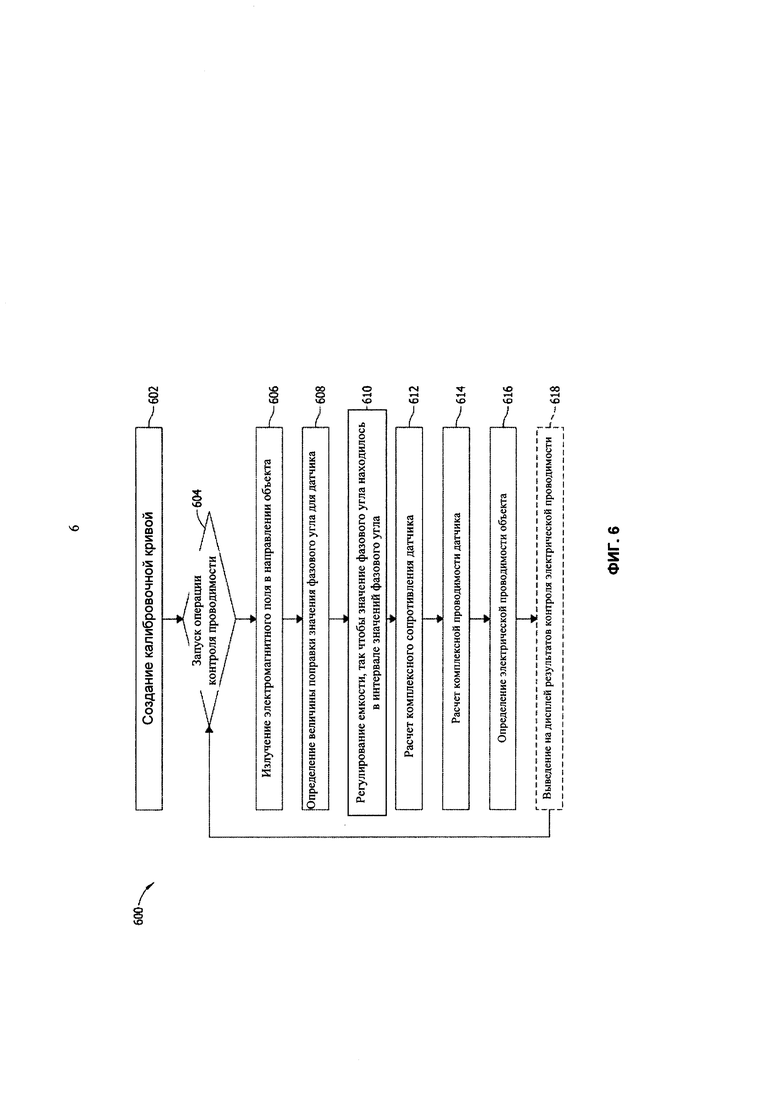
Фиг. 6 является графическим представлением способа определения электрической проводимости объекта с помощью системы контроля.
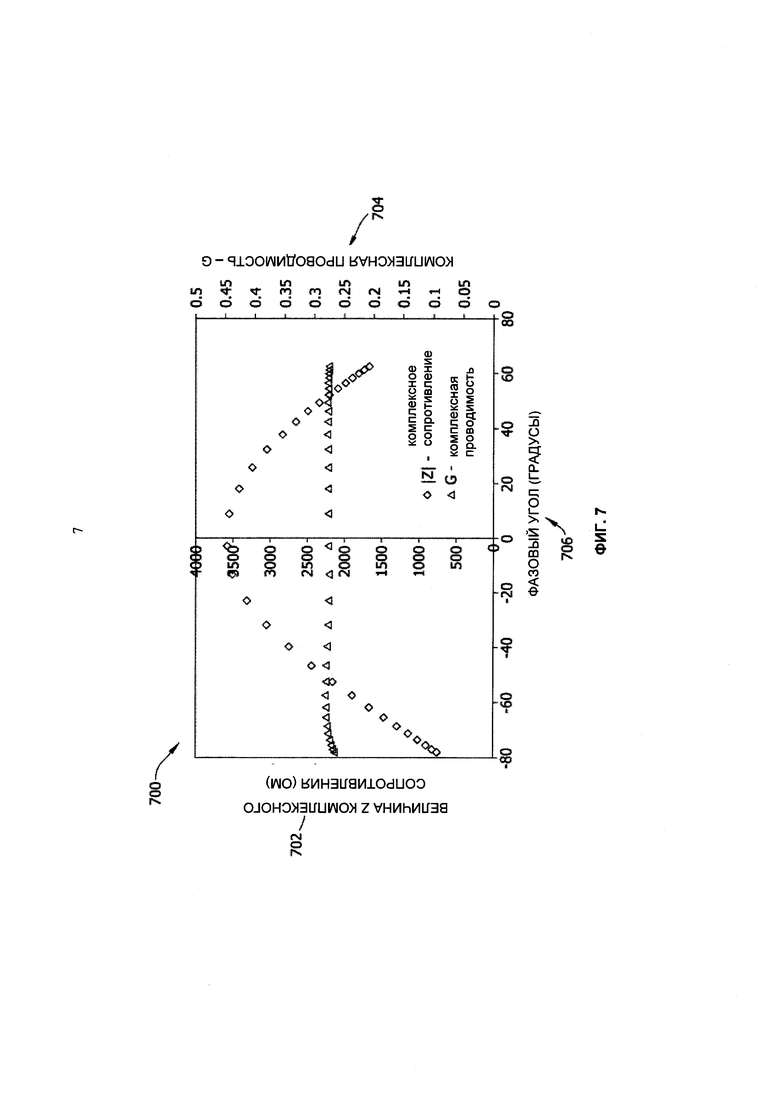
Фиг. 7 изображает график комплексной проводимости объекта, измеренной системой контроля.
Соответствующие части обозначены на чертежах соответствующими ссылочными позициями.
Осуществление изобретения
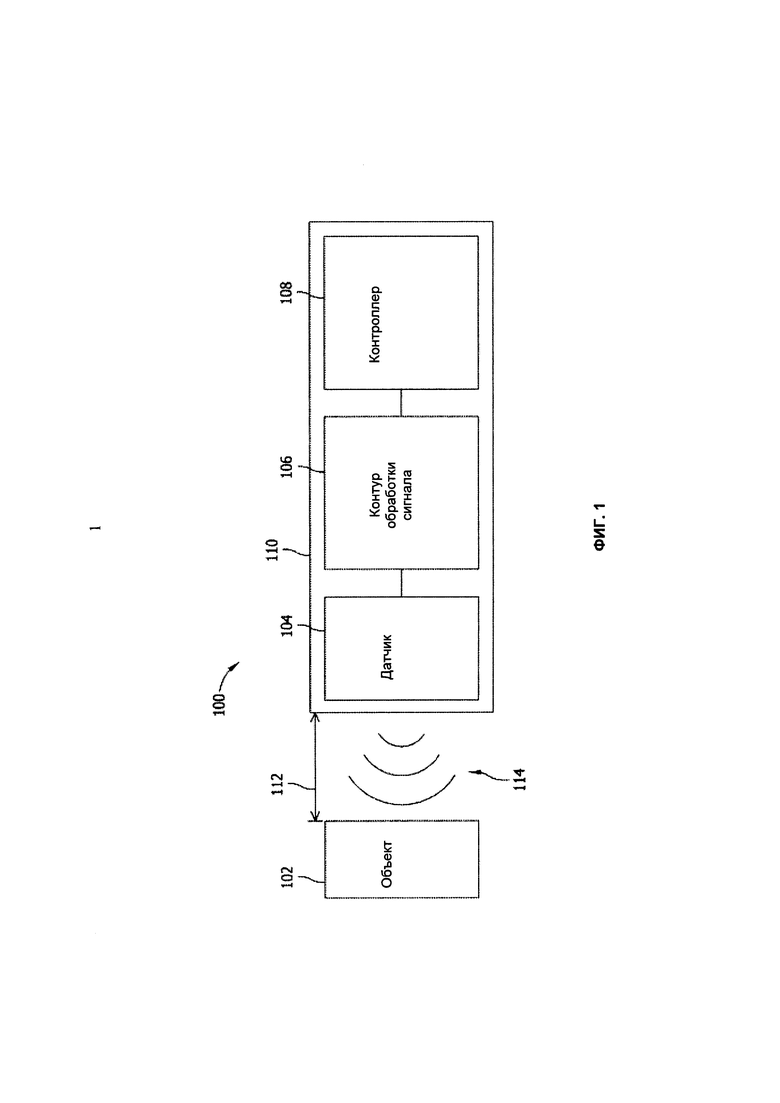
Фиг. 1 изображает блок-схему системы 100 контроля в соответствии с одним из предпочтительных вариантов осуществления изобретения, которую можно использовать для определения или контроля электрической проводимости объекта 102. В соответствии с одним из предпочтительных вариантов осуществления изобретения, система 100 контроля используется для неразрушающего определения и/или контроля электрической проводимости (или электропроводности) в одном или более местах на теле человека для определения состояния или диагностирования заболевания человека, например, сосудистого заболевания.
Система 100 контроля содержит датчик 104, соединенный с контуром 106 обработки сигнала, и контроллер 108, соединенный с контуром обработки сигнала. В соответствии с одним из предпочтительных вариантов осуществления изобретения, система 100 контроля может быть заключена в корпус 110 для защиты компонентов системы. Корпус 110 может размещаться в непосредственной близости от объекта 102, так что между датчиком 104 и объектом 102 определяется зазор 112.
В процессе работы контур 106 обработки сигнала генерирует возбуждающий сигнал с фиксированной частотой и передает этот возбуждающий сигнал на датчик 104. Возбуждающий сигнал вынуждает датчик 104 излучать электромагнитное поле 114. В том случае, когда датчик 104 расположен в непосредственно близости от объекта 102, поле 114 пересекают зазор 112 и взаимодействует с объектом, приводя к образованию внутри объекта вихревых токов. Взаимодействие поля 114 и объекта 102 обычно приводит к сдвигу фазового угла сигнала, полученного от датчика 104 (например, тока, проходящего через датчик) за счет паразитной емкости, возникающей в датчике, когда датчик находится вблизи исследуемого или контролируемого объекта. Например, ток, проходящий через датчик 104, и напряжение на датчике могут не достигать своих максимальный значений одновременно. Таким образом, фазовый угол соответствует разности по времени между моментом, когда ток, проходящий через датчик 104, достигает максимального значения, и моментом, когда напряжение на датчике достигает максимального значения. Нулевой фазовый угол означает резонансное состояние датчика 104.
Кроме того, сигнал, полученный отдатчика 104, может быть ослаблен, что приводит к уменьшению амплитуды сигнала по сравнению с амплитудой возбуждающего сигнала. Ослабление сигнала приводит к тому, что в датчике 104 возникает эффективное комплексное сопротивление. Как было более подробно сказано выше, контур 106 обработки сигнала измеряет ток и напряжение сигнала, полученного отдатчика 104, и передает измеренные значения тока и напряжения на контроллер 108.
Контроллер 108 определяет фазовый угол сигнала, полученного от датчика 104, и определяет комплексное сопротивление датчика на основании измерений напряжения и тока, полученных от контура 106 обработки сигнала. Кроме того, контроллер 108 рассчитывает комплексную проводимость датчика 104 и использует рассчитанную комплексную проводимость для определения электрической проводимости объекта 102. Электрическая проводимость объекта 102 может использоваться для определения одной или более характеристик или состояний объекта.
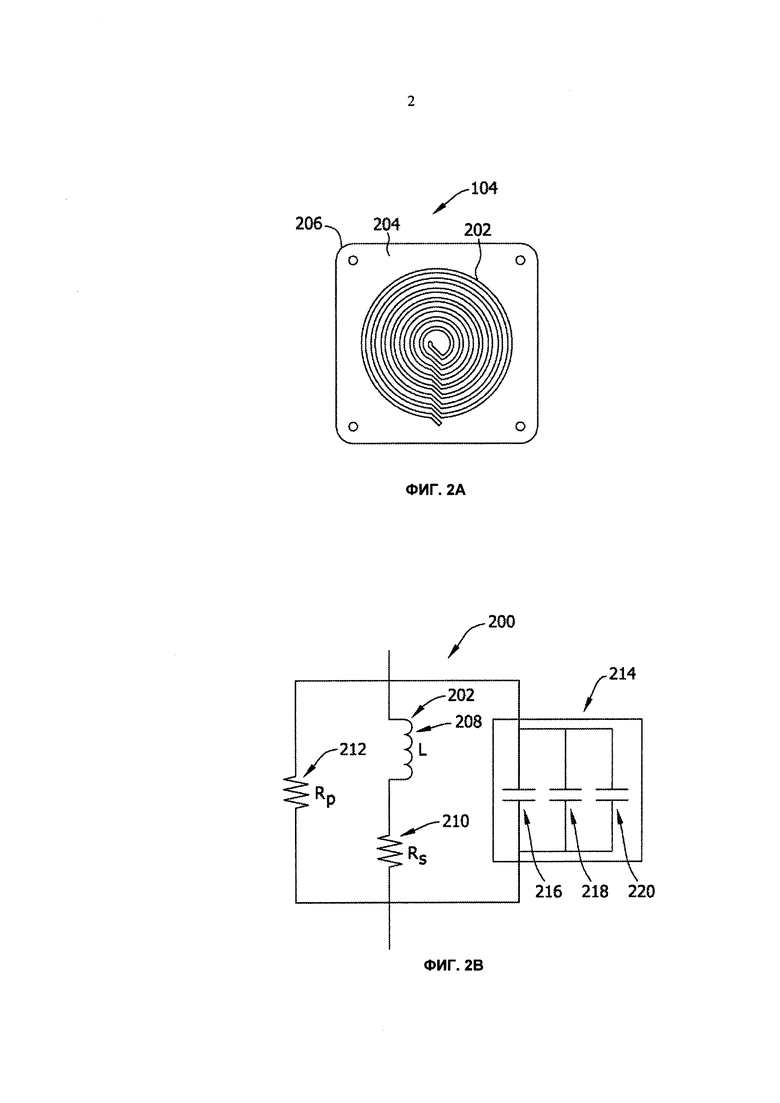
На фиг. 2А и 2 В представлен датчик 104, подходящий для использования с системой 100 контроля по фиг. 1. Более конкретно, на фиг. 2А представлен вид сверху датчика 104, а на фиг. 2 В схематично представлен контур 200, представляющий электрические характеристики датчика.
Как видно на фиг. 2А, датчик 104 содержит корпус 206 датчика, имеющий по существу плоскую поверхность 204. По существу спиралевидный проводник 202 тока (или «катушка») соединен с по существу плоской поверхностью 204 корпуса 206 датчика. В соответствии с одним из предпочтительных вариантов осуществления изобретения, корпус 206 датчика является печатной платой ПП (РСВ - от англ. «printed circuit board»). Например, корпус 206 датчика может являться двухслойной ПП, которая содержит проводник 202, расположенный в первом слое, и дополнительный проводник (не показан), выполненный в виде спирали, расположенной ступенчато или чередующейся с проводником 202 и расположенной во втором слое. В соответствии с другими вариантами осуществления изобретения, корпус 206 датчика может представлять собой другие подложки, с которыми может соединяться проводник 202.
Как видно на фиг. 2 В, проводник 202 выполнен в виде индуктора 208 (L), последовательно соединенного с первым резистивным элементом 210 (Rs). Проводник 202 и первый резистивный элемент 210 параллельно соединены с вторым резистивным элементом 212 (Rp) и емкостным элементом 214.
В соответствии с одним из предпочтительных вариантов осуществления изобретения, первый резистивный элемент 210 представляет собой эффективное сопротивление, добавленное или возбужденное в датчике 104 в результате взаимодействия вихревых токов с объектом 102. Второй резистивный элемент 212 является резистором, соединенным с датчиком 104 для снижения добротности датчика 104 по желанию. Следует понимать, что, хотя значение сопротивления второго резистивного элемента 212 может быть выбрано произвольно, оно должно значительно превышать сопротивление первого резистивного элемента 210. Например, сопротивление второго резистивного элемента 212 может превышать сопротивление первого резистивного элемента 210 приблизительно в 1000 раз, в 10000 раз или даже больше.
Емкостный элемент 214 соединен с датчиком 104 для регулирования фазового угла сигнала, полученного от датчика, и/или тока, проходящего через датчик. В соответствии с одним из предпочтительных вариантов осуществления изобретения, емкостный элемент 214 является регулируемым конденсатором (также называемым подстроечным конденсатором или триммером), который позволяет пользователю или устройству, такому как контроллер 108, регулировать емкость емкостного элемента 214. Следует понимать, что емкостный элемент 214 может быть представлен в виде множества параллельно соединенных друг с другом емкостных компонентов. Например, первый емкостный компонент 216 представляет величину собственной емкости проводника 202, второй емкостный компонент 218 представляет емкость, наведенную в проводнике 202 в результате взаимодействия проводника 202 с объектом 102, расположенным рядом с проводником 202, и третий емкостный компонент 220 представляет описанную выше регулируемую емкость, которая позволяет пользователю или контроллеру 108 регулировать емкость емкостного элемента 214.
В соответствии с одним из предпочтительных вариантов осуществления изобретения, система 100 контроля измеряет наведенную емкость проводника 202 (т.е. емкость, представленную вторым емкостным компонентом 218). Пользователь или контроллер 108 регулирует или перестраивает емкостный элемент 214 (т.е. третий емкостный компонент 220) во всем диапазоне значений емкости емкостного элемента 214, при этом измеряя фазовый угол (или скорректированный фазовый угол, как будет описано ниже) сигнала, полученного от датчика 104 при каждом значении емкости. Регулирование емкостного элемента 214 (также называемое «перестройкой значений емкости») осуществляется в первый раз объект находится рядом с проводником 202 (т.е. в электромагнитном поле 114, возбужденном проводником), и второй раз, когда объект не находится рядом с проводником (т.е. не в электромагнитном поле, возбужденном проводником). Контроллер 108 сравнивает значения емкости, необходимые для создания резонанса (например, нулевого, по существу фазового угла), в процессе этих двух перестроек значений емкости для определения разницы между двумя емкостями. Величина емкости, необходимая для создания резонанса, когда объект не находится рядом с проводником 202, превышает значение емкости, необходимое, когда объект находится рядом с проводником. Разница в значениях емкости является величиной емкости, являющейся результатом взаимодействия между проводником 202 и объектом 102, и, кроме того, она связана с физическим состоянием объекта.
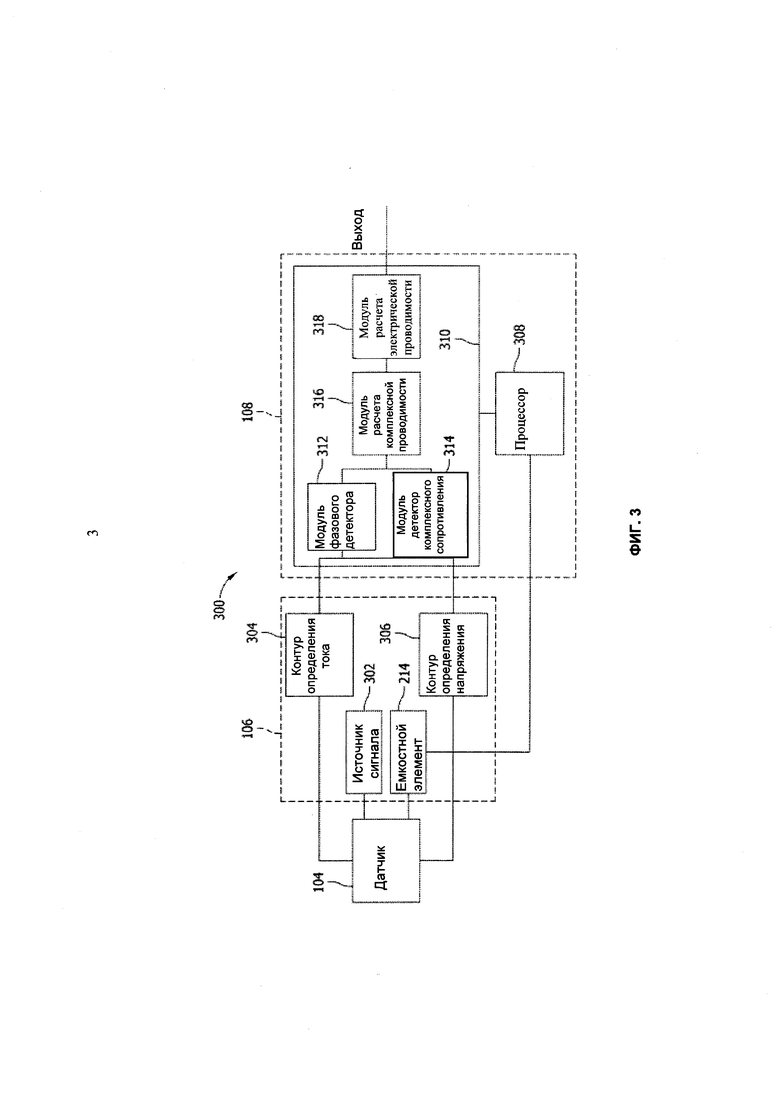
На фиг. 3 представлена упрощенная блок-схема 300 системы 100 контроля по фиг. 1. На фиг. 4 схематично представлена аналоговая часть одного из контуров 400 обработки сигнала системы 100 контроля.
Как видно на фиг. 3, датчик 104 соединен с емкостным элементом 214 и с источником 302 сигнала. В соответствии с одним из предпочтительных вариантов осуществления изобретения, емкостный элемент 214 и источник 302 сигнала расположены в контуре 106 обработки сигнала. Альтернативно, емкостный элемент 214 и/или источник 302 сигнала могут быть расположены в датчике 104 или вне датчика и вне контура 106 обработки сигнала.
Контур 106 обработки сигнала содержит контур 304 определения тока и контур 306 определения напряжения. Контур 304 определения тока определяет или измеряет ток, проходящий через или исходящий из датчика 104. В соответствии с одним из предпочтительных вариантов осуществления изобретения, контур 304 определения тока генерирует выходной сигнал (далее называемый «сигналом измерения тока»), напряжение которого прямо пропорционально измеренному значению тока, проходящего через датчик 104. Контур 306 определения напряжения определяет или измеряет напряжение на датчике 104 или выходное напряжение датчика. В соответствии с одним из предпочтительных вариантов осуществления изобретения, контур 306 определения напряжения генерирует выходной сигнал (здесь и далее «сигнал измерения напряжения»), напряжение которого пропорционально напряжению, измеренному на датчике 104. Сигнал измерения тока и сигнал измерения напряжения передаются на контроллер 108.
Контроллер 108 содержит процессор 308 и запоминающее устройство 310, соответствующим образом соединенное с процессором. Процессор 308 содержит любую подходящую программируемую схему, содержащую одну или более систем и микроконтроллеров, микропроцессоров, процессоров с сокращенным набором команд (ПСНК) (RISC - от англ. «reduced instruction set circuits»), заказных специализированных интегральных схем (ASIC - от англ. «application specific integrated circuits»), программируемых логических контроллеров (ПЛК) (ПЛК - от англ. «programmable logic circuits»), программируемых логических интегральных схем (ПЛИС) (FPGA - от англ. «field programmable gate arrays») и любых других схем, способных осуществлять описанные выше функции. Все перечисленные примеры приведены только в иллюстративных целях, и их не следует рассматривать как каким бы то ни было образом ограничивающие термин «процессор». В соответствии с одним из предпочтительных вариантов осуществления изобретения, процессор 308 соответствующим образом соединен с емкостным элементом 214, чтобы контролировать или регулировать емкость емкостного элемента.
Запоминающее устройство 310 содержит машиночитаемую запоминающую среду, такую как, но без ограничений, запоминающее устройство с произвольной выборкой (ЗУПВ) (RAM - от англ. «random access memory»), флэш-память, накопитель на жестком диске, твердотельный накопитель, гибкий диск, флэш-накопитель, компакт-диск, цифровой видеодиск и/или любую подходящую память. В соответствии с одним из предпочтительных вариантов осуществления изобретения, запоминающее устройство 310 содержит данные и/или команды, которые может выполнять процессор 308, так что процессор 308 программируется командами, которые позволяют процессору 308 осуществлять описанные выше функции.
Кроме того, запоминающее устройство 310 включает множество выполнимых компьютером программных модулей, выполняемых процессором 308. Программные модули включают модуль 312 фазового детектора, модуль 314 детектора комплексного сопротивления, модуль 316 расчета комплексной проводимости и модуль 318 расчета электрической проводимости. Альтернативно, один или более программных модулей, таких как модуль 312 фазового детектора, могут быть выполнены в виде схемы или устройства, отдельного от процессора 308.
В соответствии с одним из предпочтительных вариантов осуществления изобретения, модуль 312 фазового детектора определяет фазовый угол датчика 104 (например, тока, проходящего через датчик) на основании сигнала измерения тока и сигнала измерения напряжения, полученных от контура 106 обработки сигнала. Более конкретно, модуль 312 фазового детектора определяет фазовый сдвиг или фазовый угол между сигналом измерения тока и сигналом измерения напряжения и генерирует сигнал или значение (здесь и далее «фазовый угол датчика»), соответствующее определенному фазовому сдвигу или фазовому углу между сигналом измерения тока и сигналом измерения напряжения. В соответствии с одним из предпочтительных вариантов осуществления изобретения, как было подробно описано выше, процессор 308 рассчитывает величину поправки значения фазового угла для регулирования значения фазового угла датчика.
Модуль 314 определения комплексного сопротивления определяет эффективное комплексное сопротивление датчика 104 (например, комплексное сопротивление эффективного контура 200 датчика, представленного на фиг. 2 В). Более конкретно, модуль 314 определения комплексного сопротивления делит среднеквадратичное значение (RMS - от англ. «root mean square») напряжения, измеренного на датчике 104 (здесь и далее «напряжение датчика»), представленное сигналом измерения напряжения, на среднеквадратичное значение тока, проходящего через датчик (здесь и далее «ток датчика»), представленное сигналом измерения тока, для получения эффективного комплексного сопротивления датчика (здесь и далее «комплексное сопротивление датчика»). В соответствии с некоторыми вариантами осуществления изобретения, напряжение датчика и ток датчика могут основываться на мгновенных значениях напряжения и тока, полученных из формы колебаний напряжения на датчике 104 и тока, проходящего через датчик.
Модуль 316 расчета комплексной проводимости рассчитывает комплексную проводимость датчика 104 на основании значения фазового угла датчика (отрегулированного величиной поправки значения фазового угла) и комплексного сопротивления датчика. Например, как уже было сказано более подробно, модуль 316 расчета комплексной проводимости рассчитывает комплексную проводимость датчика путем деления косинуса фазового угла датчика (отрегулированного величиной поправки значения фазового угла) на комплексное сопротивление датчика.
Модуль 318 расчета электрической проводимости определяет или рассчитывает электрическую проводимость объекта 102 на основании рассчитанной комплексной проводимости датчика 104. Например, в соответствии с одним из предпочтительных вариантов осуществления изобретения, модуль 318 расчета электрической проводимости определяет электрическую проводимость объекта 102 путем обращения к калибровочной кривой, более подробно описанной выше, чтобы определить значение электрической проводимости, соответствующее рассчитанному значению комплексной проводимости датчика 104. Электрическая проводимость объекта 102, комплексная проводимость датчика 104 и/или любые другие значения, определенные или рассчитанные контроллером 108, могут выводиться, например, на дисплей или в запоминающее устройство.
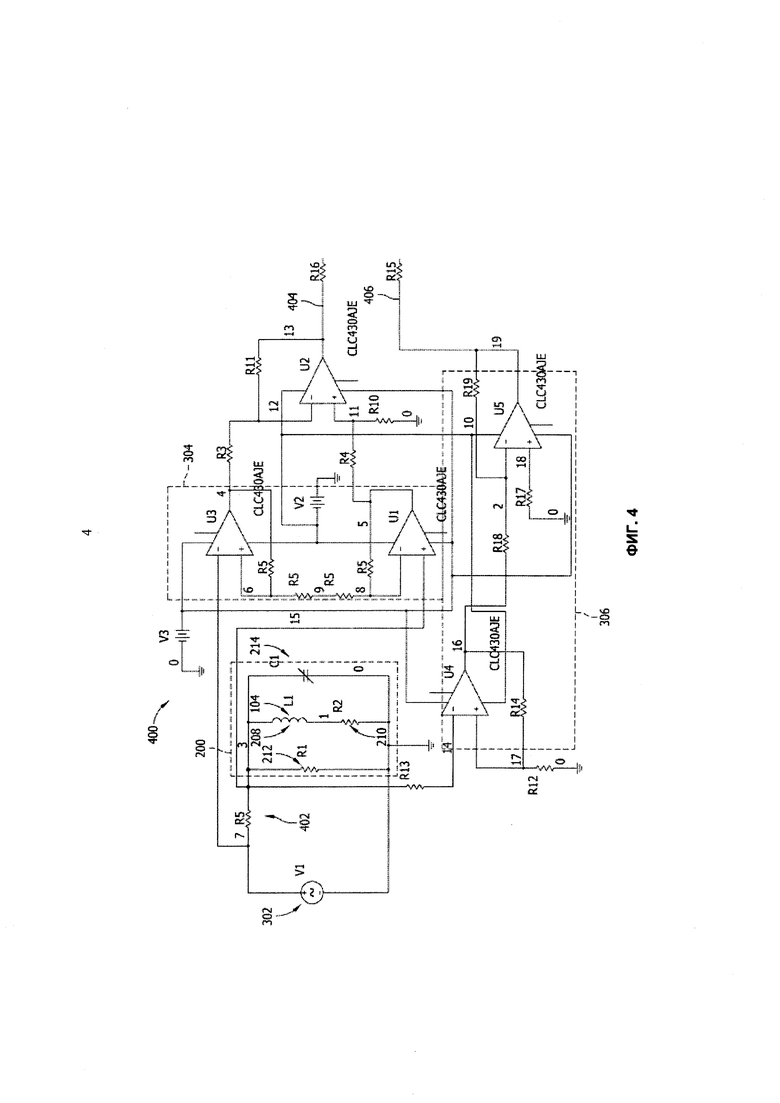
Как видно на фиг. 4, источник 302 сигнала параллельно соединен со вторым резистивным элементом 212, емкостным элементом 214 и контуром 200 датчика (включая индуктор 208 и первый резистивный элемент 210), описанным выше со ссылкой на фиг. 2 В. Источник 302 сигнала также последовательно соединен с токочувствительным резистором 402 для определения тока, проходящего через датчик 104 (т.е. упомянутого выше тока датчика). Источник 302 сигнала является источником переменного тока (АС), подающим на датчик возбуждающий сигнал переменного тока. В соответствии с одним из вариантов осуществления изобретения, источник 302 сигнала является емкостным трехточечным кварцевым генератором, или содержит такой генератор, который осциллирует с заданной частотой, такой как приблизительно 12 МГц или любой другой подходящей частотой.
В соответствии с одним из предпочтительных вариантов осуществления изобретения, контур 304 определения тока соединяется через токочувствительный резистор 402 для измерения падения напряжения на токочувствительном резисторе. В соответствии с одним из предпочтительных вариантов осуществления изобретения, контур 304 определения тока включает пару усилителей, таких как операционные усилители. Контур 304 определения тока генерирует первый вывод 404 контура 400 обработки сигнала (т.е. сигнала измерения тока), напряжение которого пропорционально току, проходящему через датчик 104.
В соответствии с одним из предпочтительных вариантов осуществления изобретения, контур 306 определения напряжения соединен через второй резистивный элемент 212 для измерения падения напряжения на втором резистивном элементе 212 и, следовательно, падения напряжения на датчике 104. В соответствии с одним из предпочтительных вариантов осуществления изобретения, контур 306 определения напряжения включает пару усилителей, таких как операционные усилители. Контур 306 определения напряжения генерирует второй вывод 406 контура 400 обработки сигнала (т.е. сигнала измерения тока), напряжение которого пропорционально току, проходящему через датчик 104.
В процессе работы контур 400 обработки сигнала используется для упрощения определения электрической проводимости объекта 102 путем расчета комплексной проводимости датчика 104. Более конкретно, комплексная проводимость (Y) датчика 104 равна:

где G - вещественная часть комплексной проводимости Y, а В - мнимая часть комплексной проводимости Υ (реактивная проводимость).
В соответствии с одним из предпочтительных вариантов осуществления изобретения, здесь используется только вещественная часть G комплексной проводимости, а мнимая часть В комплексной проводимости не учитывается. Таким образом, в настоящем контексте термин «комплексная проводимость» (admittance) относится к вещественной части G комплексной проводимости Y, если не указано иначе.
Комплексную проводимость G датчика 104 получают путем вычисления G из формулы:

где θ - фазовый угол датчика (т.е. фазовый угол выходного сигнала датчика), Ζ - комплексное сопротивление датчика, Rp - сопротивление второго резистивного элемента 212, Rs - эффективное сопротивление первого резистивного элемента 210, ω - частота датчика (т.е. частота выходного сигнала датчика) и L - индуктивность датчика (т.е. индуктора 208).
Из формулы 2 видно, что Rs обычно мало по сравнению с членом ω2L2 и, в соответствии с некоторыми вариантами осуществления изобретения, может не учитываться или может считаться нулевым по сравнению с членом ω2L2. Соответственно, поскольку индуктивность L является постоянной величиной, комплексная проводимость строится таким образом, чтобы она была по существу линейной относительно 1/ω2. Иными словами, комплексная проводимость датчика 104 может рассчитываться при множестве подходящих частот и, в отличие от систем из предшествующего уровня техники, ее расчет не ограничивается только частотой резонанса или близкой к ней, или резонансным состоянием датчика 104.
Соответственно, чтобы рассчитать комплексную проводимость датчика 104, фазовый угол датчика и комплексное сопротивление датчика рассчитывают, как указано выше. Процессор 308 рассчитывает косинус фазового угла датчика и делит полученный результат на комплексное сопротивление датчика для расчета комплексной проводимости датчика.
Однако измерение фазового угла может нуждаться в регулировании или калибровке из-за дополнительного фазового сдвига за счет других компонентов контура. Таким образом, в соответствии с одним из предпочтительных вариантов осуществления изобретения, перед расчетом комплексной проводимости датчика 104 определяется величина поправки значения фазового угла. Сначала емкостный элемент 214 регулируют до высокого значения емкости, такого как наибольшее значение емкости, которое может обеспечить емкостный элемент. Фазовый угол (здесь и далее «фазовый угол высокой емкости») датчика 104 измеряют, как описано выше, и величину поправки значения фазового угла устанавливают на значение, приблизительно на 90 градусов превышающее значение фазового угла высокой емкости. В идеальной ситуации с идеальными компонентами величина поправки значения фазового угла равна нулю.
Затем емкостный элемент регулируют (т.е. регулируют емкость, соединенную через датчик 104) до тех пор, пока разность между фазовым углом датчика и величиной поправки значения фазового угла не окажется в предварительно определенном интервале значений фазового угла. В соответствии с одним из предпочтительных вариантов осуществления изобретения, интервал значений фазового угла составляет от приблизительно -70 градусов до приблизительно +70 градусов. В соответствии с другим вариантом осуществления изобретения, интервал значений фазового угла исключает предварительно определенный интервал значений резонансного фазового угла, составляющий от приблизительно -3 градусов до приблизительно +3 градусов. Таким образом, в соответствии с таким вариантом осуществления, интервал значений фазового угла может включать значения фазовых углов от приблизительно -70 градусов до приблизительно -3 градусов и от приблизительно +3 градусов до приблизительно +70 градусов. Альтернативно, интервал значений фазового угла и/или интервал значений резонансного фазового угла могут включать любые другие верхние или нижние границы, позволяющие системе 100 контроля функционировать как описано в настоящем документе.
Когда значение фазового угла, отрегулированное величиной поправки значения фазового угла (т.е. значение фазового угла минус величина поправки значения фазового угла), находится в предварительно определенном интервале значений фазового угла, процессор 308 рассчитывает комплексную проводимость датчика 104, как описано выше, т.е. путем деления косинуса отрегулированного фазового угла на комплексное сопротивление датчика. Процессор 308 определяет электрическую проводимость объекта 102 путем обращения к калибровочной кривой датчика 104. Таким образом, как уже было сказано, система 100 контроля (например, процессор 308) может рассчитать комплексную проводимость датчика 104 и определить электрическую проводимость объекта 102, когда датчик не находится в состоянии резонанса.
На фиг. 5 графически представлена калибровочная кривая 500, которая может быть создана и/или использована системой 100 контроля. По оси абсцисс калибровочной кривой 500 отложены значения электрической проводимости (или электропроводности) 502 одного или более объектов, а на оси ординат отложены значения комплексной проводимости 504 датчика 104, определенные системой 100 контроля. В соответствии с одним из предпочтительных вариантов осуществления изобретения, все измерения, представленные калибровочной кривой 500, получены при использовании возбуждающего сигнала датчика с одной фиксированной частотой.
В соответствии с одним из предпочтительных вариантов осуществления изобретения, калибровочная кривая 500 создается для калибровки системы 100 контроля. Например, калибровочная кривая создается для определения корреляции между измеренной комплексной проводимостью 504 датчика 104 и электрической проводимостью 502 стандартизованных контролируемых объектов. Результаты испытаний показывают, что при постоянной величине электрической проводимости контролируемого объекта комплексная проводимость 504 датчика 104 и обратный квадрат частоты выходного сигнала датчика 104 соотносятся по существу линейно. Кроме того, результаты испытаний показывают, что по существу линейное соотношение существует между комплексной проводимостью 504 датчика 104 и электрической проводимостью (или электропроводностью 502) наблюдаемого объекта при поддержании фиксированной частоты возбуждения, т.е. когда система 100 контроля используется, как описано выше.
В процессе работы система 100 контроля выбирает и контролирует множество объектов, имеющих известную электрическую проводимость (т.е. объектов, состоящих из материалов, имеющих известную электрическую проводимость). Каждый объект выбирается так, что проводимость одного объекта отличается от проходимости любого другого объекта. Для каждого из объектов система 100 контроля излучает электромагнитное поле 114 в направлении объекта и рассчитывает комплексную проводимость датчика 104 (как описано выше со ссылкой на фиг. 3 и 4) в ответ на вихревые токи, возбужденные в объекте. Для каждого измерения расстояние между датчиком и объектом (т.е. зазор 112 по фиг. 1) поддерживается по существу одинаковым. Измеренные значения комплексной проводимости откладываются в зависимости от известной удельной электрической проводимости объекта, и калибровочная кривая 500 создается с помощью алгоритма с оптимизацией, или иным образом, образуя линию, по существу соединяющую каждое из отложенных значений комплексной проводимости 504 и электрической проводимости 502. В соответствии с некоторыми предпочтительными вариантами осуществления изобретения, создается и сохраняется в памяти (такой как запоминающее устройство 310 по фиг. 3) множество калибровочных кривых 500, соответствующих измерениям, полученным на множестве зазоров 112.
После того как калибровочная кривая 500 создана, определяются наклон кривой 500 и переход через нулевое значение кривой 500 (т.е. точка пересечения или значение комплексной проводимости 504 при нулевой электрической проводимости 502 объекта). Наклон и переход через нулевое значение кривой 500 обеспечивают дальнейшую корреляцию между измеренной комплексной проводимостью 504 датчика и неизвестной электрической проводимостью 502 объекта, контролируемого системой 100 контроля.
Фиг. 6 является графическим представлением способа 600 определения электрической проводимости объекта, такого как объект 102 по фиг. 1. В соответствии с одним из предпочтительных вариантов осуществления изобретения, способ 600 осуществляется системой 100 контроля по фиг. 1.
Первоначально для системы 100 контроля создается 602 калибровочная кривая 100. Например, значения комплексной проводимости датчика 104 рассчитываются или измеряются с помощью датчика для контроля объектов, имеющих известную электрическую проводимость, как подробнее описано выше со ссылкой на фиг. 5. Калибровочная кривая 500 создается из измеренных значений комплексной проводимости и известных значений электрической проводимости. В соответствии с одним из предпочтительных вариантов осуществления изобретения, калибровочная кривая 500 и/или значения, на которых она основана, сохраняются в памяти, такой как запоминающее устройство 310 системы 100 контроля. В соответствии с некоторыми вариантами осуществления изобретения, создается и сохраняется в запоминающем устройстве 310 множество калибровочных кривых 500, соответствующих измерениям, произведенным во множестве зазоров 112.
После создания калибровочной кривой 500, может запускаться 604 операция контроля электрической проводимости. Электромагнитное поле 114 излучается 606 в направлении объекта 102, и это поле взаимодействует с этим объектом. Величина поправки значения фазового угла определяется 608 для датчика 104, например, как описано выше со ссылкой на фиг. 4. Кроме того, емкость датчика 104 (например, емкостный элемент 214 по фиг. 2) регулируется 610, так что значение фазового угла датчика (минус величина поправки значения фазового угла) оказывается в интервале значений фазового угла. В соответствии с одним из предпочтительных вариантов осуществления изобретения, значения, соответствующие току датчика, напряжению датчика, фазовому углу датчика и величине поправки значения фазового угла, сохраняются в памяти.
Комплексное сопротивление датчика 104 рассчитывается 612 с помощью значений тока датчика и напряжения датчика. Комплексная проводимость датчика 104 рассчитывается с помощью рассчитанного комплексного сопротивления и отрегулированного значения фазового угла датчика (т.е. значения фазового угла минус величина поправки значения фазового угла).
Электрическая проводимость объекта 102 определяется 616 на основании рассчитанной комплексной проводимости датчика 104 и калибровочной кривой 500. Например, рассчитанная комплексная проводимость датчика 104 откладывается на калибровочной кривой 500 и определяется соответствующее значение электрической проводимости для объекта 102. Как вариант, результаты контроля электрической проводимости, а также рассчитанная комплексная проводимость датчика 104, определенная электрическая проводимость объекта 102 и/или любое другое значение, определенное способом 600 или системой 100 контроля, могут выводиться 618 на дисплей. Эти результаты могут также включать сравнение с результатами предыдущего контроля для определения изменения комплексной проводимости и/или электрической проводимости, и/или могут включать сравнение с одним или более исходных значений, таких как исходное значение комплексной проводимости или электрической проводимости. Результаты могут выводиться на дисплей пользователя, могут передаваться в электронном виде на одно или более удаленных устройств для выведения на дисплей, и/или могут сохраняться в памяти для дальнейшего выведения на дисплей и/или анализа. Способ 600 возвращается к запуску 604 новой операции контроля электрической проводимости объекта 102 или нового объекта по желанию.
Фиг. 7 изображает график измеренной комплексной проводимости 700, созданный системой 100 контроля. По первой оси ординат кривой 700 комплексной проводимости отложены значения рассчитанного комплексного сопротивления 702 объекта, а по второй оси ординат отложены рассчитанные значения комплексной проводимости 704 объекта. По оси абсцисс отложены значения фазового угла 706 датчика 104.
Кривая 700 комплексной проводимости включает экспериментальные данные, показывающие, что вычисленное значение комплексной проводимости является по существу постоянным во всем диапазоне значений фазового угла (например, от приблизительно -70 градусов до приблизительно +70 градусов), несмотря на то, что комплексное сопротивление значительно варьируется с изменением фазового угла. Следует понимать, что в одном из вариантов осуществления изобретения, поправка значения фазового угла не является необходимой для датчика 104 и/или контура 106 обработки сигнала, поскольку рассчитанное комплексное сопротивление достигает максимального значения при приблизительно нулевом значении фазового угла, которое является показателем резонанса.
Альтернативно значение фазового угла может корректироваться путем настройки контура 106 обработки сигнала, путем регулирования емкостного элемента 214 до достижения максимального значения комплексного сопротивления (как показано на фиг. 7). Фазовый угол, измеренный в той точке, в которой комплексное сопротивление достигает максимального значения, используется в качестве величины поправки значения фазового угла. Таким образом, в соответствии с таким вариантом осуществления изобретения, значение фазового угла, определенное при максимальном значении комплексного сопротивления, вычитается из значений последующих измерений фазового угла. Хотя фазовый угол может не нуждаться в поправке, предпочтительным может являться намеренное создание фазового сдвига, например, в контуре 304 определения тока или контуре 306 определения электричества. Такой фазовый сдвиг может повысить точность измерения фазы, особенно в том случае, когда система 100 контроля работает с фазовым углом, равным нулю или близким к нулю.
Технический эффект описанных здесь систем и способов включает, по меньшей мере, один из этапов, на которых: (а) излучают электромагнитное поле в направление объекта, так что это электромагнитное поле взаимодействует с этим объектом; (b) регулируют фазовый угол тока, проходящего через датчик, с помощью регулируемого емкостного элемента, соединенного с датчиком; (с) производят измерение напряжения, соответствующего напряжению на датчике; (d) производят измерение тока, соответствующего току, проходящему через датчик; (е) рассчитывают комплексную проводимость датчика на основании измерения напряжения и измерения тока; и (f) определяют электрическую проводимость объекта на основании рассчитанной комплексной проводимости датчика.
Если при введении элементов настоящего изобретения и предпочтительных вариантов осуществления использованы артикли, слова и выражения «один из», «этот», «такой» и «указанный», то это означает, что имеется один или более таких элементов. Термины «содержащий», «включающий» и «имеющий» являются включительными и означают возможность существования других, дополнительных элементов, помимо перечисленных.
Поскольку существует возможность осуществления различных изменений без отклонения от сущности изобретения, следует понимать, что приведенное выше описание различных вариантов осуществления изобретения со ссылками на прилагаемые чертежи дано в качестве иллюстрации и не является ограничивающим.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО И СПОСОБ ИЗМЕРЕНИЯ ПОВЕРХНОСТНОГО СОПРОТИВЛЕНИЯ ПОЛУПРОВОДНИКОВЫХ ПЛАСТИН | 1996 |
|
RU2121732C1 |
| УСТРОЙСТВО ДЛЯ ВНУТРИПОЧВЕННОГО ИЗМЕРЕНИЯ АГРОТЕХНОЛОГИЧЕСКИХ ХАРАКТЕРИСТИК ПАХОТНОГО СЛОЯ ПОЧВЫ В ДВИЖЕНИИ | 2013 |
|
RU2537908C2 |
| КОМПЕНСАЦИЯ ТЕМПЕРАТУРЫ ДЛЯ ИЗМЕРЕНИЯ АНАЛИТА НА ОСНОВАНИИ ЗАДАННОГО ВРЕМЕНИ ПОЛУЧЕНИЯ ВЫБОРКИ ИЗ ФИЗИЧЕСКОЙ ХАРАКТЕРИСТИКИ ОБРАЗЦА, СОДЕРЖАЩЕГО АНАЛИТ | 2014 |
|
RU2674706C2 |
| ИЗМЕРИТЕЛЬНАЯ СИСТЕМА ДЛЯ ОПРЕДЕЛЕНИЯ УРОВНЯ РАЗДЕЛА ФАЗ В МНОГОФАЗНОЙ ТЕКУЧЕЙ КОМПОЗИЦИИ | 2015 |
|
RU2682611C2 |
| СИСТЕМА КОНТРОЛЯ СОДЕРЖАНИЯ ВОДЫ | 1991 |
|
RU2066750C1 |
| ПРИБОР ДЛЯ УСТРОЙСТВА ГЕНЕРАЦИИ АЭРОЗОЛЯ | 2019 |
|
RU2762626C1 |
| Система датчика для измерения уровня поверхности раздела в многофазных флюидах | 2013 |
|
RU2652148C2 |
| ЭЛЕКТРОПРИВОДНОЙ МОДУЛЬ | 2012 |
|
RU2592264C2 |
| Система электропитания нагрузки переменного тока | 1974 |
|
SU776582A3 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ВОДОНАСЫЩЕННОСТИ КЕРНА | 2011 |
|
RU2484453C1 |
Изобретение, в общем, относится к системам контроля и, более конкретно, к способу определения электрической проводимости объекта или материала. Система содержит датчик, способный излучать электромагнитное поле при получении возбуждающего сигнала, причем при помещении в указанное электромагнитное поле объекта оно взаимодействует с этим объектом. Контур обработки сигнала, соединенный с датчиком и выполненный с возможностью: обеспечивать регулируемую емкость датчика для регулирования фазового угла тока, проходящего через датчик; производить измерение напряжения, соответствующего напряжению на датчике; производить измерение тока, соответствующего току, проходящему через датчик. Контроллер, соединенный с контуром обработки сигнала, выполненный с возможностью: расчета комплексной проводимости датчика на основании измерения напряжения и измерения тока и определения электрической проводимости объекта на основании рассчитанной комплексной проводимости датчика. Причем система выполнена с возможностью определения электрической проводимости объекта, когда датчик не находится в резонансном состоянии. Технический результат заключается в повышении точности измерения. 3 н. и 16 з.п. ф-лы, 7 ил.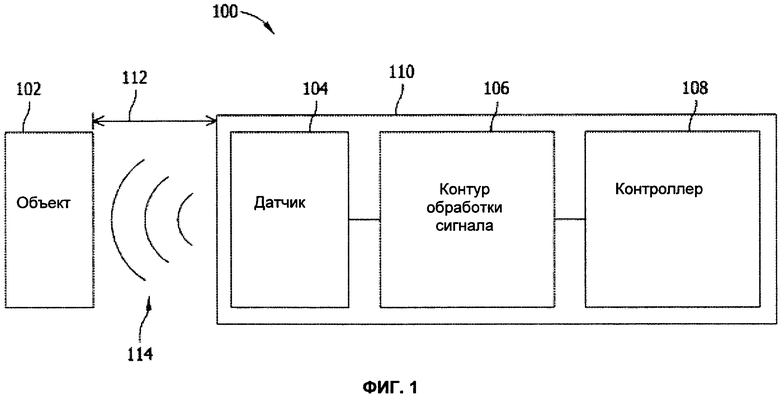
1. Система для определения электрической проводимости объекта, содержащая:
датчик, способный излучать электромагнитное поле при получении возбуждающего сигнала, причем при помещении в указанное электромагнитное поле объекта оно взаимодействует с этим объектом;
контур обработки сигнала, соединенный с датчиком и выполненный с возможностью:
обеспечивать регулируемую емкость датчика для регулирования фазового угла тока, проходящего через датчик; и
производить измерение напряжения, соответствующего напряжению на датчике; и
производить измерение тока, соответствующего току, проходящему через датчик; и
контроллер, соединенный с контуром обработки сигнала, выполненный с возможностью:
расчета комплексной проводимости датчика на основании измерения напряжения и измерения тока; и
определения электрической проводимости объекта на основании рассчитанной комплексной проводимости датчика;
причем система выполнена с возможностью определения электрической проводимости объекта, когда датчик не находится в резонансном состоянии.
2. Система по п. 1, отличающаяся тем, что контроллер дополнительно содержит запоминающее устройство, причем контроллер выполнен с возможностью сохранения данных, соответствующих калибровочной кривой, в запоминающем устройстве, причем калибровочная кривая включает корреляцию предыдущих значений комплексной проводимости датчика и значений электрической проводимости множества известных материалов.
3. Система по п. 2, отличающаяся тем, что контроллер определяет электрическую проводимость объекта путем корреляции рассчитанной комплексной проводимости датчика с величиной электрической проводимости с помощью калибровочной кривой.
4. Система по п. 1, отличающаяся тем, что контроллер выполнен с возможностью расчета полной проводимости датчика путем расчета вещественной части комплексной проводимости датчика и игнорирования мнимой части комплексной проводимости датчика.
5. Система по п. 1, отличающаяся тем, что контроллер выполнен с возможностью определения фазового угла тока, проходящего через датчик, и комплексного сопротивления датчика на основании произведенных измерений напряжения и тока.
6. Система по п. 5, отличающаяся тем, что контроллер выполнен с возможностью расчета величины поправки значения фазового угла для фазового угла тока, проходящего через датчик.
7. Система по п. 6, отличающаяся тем, что контроллер выполнен с возможностью регулирования емкости, так чтобы значение фазового угла минус величина поправки значения фазового угла оказалось в предварительно установленном интервале значений фазового угла.
8. Система по п. 1, отличающаяся тем, что контроллер дополнительно выполнен с возможностью определения величины емкости, наведенной в датчике в результате взаимодействия с объектом.
9. Система по п. 8, отличающаяся тем, что контроллер выполнен с возможностью определения величины емкости путем:
регулирования регулируемой емкости до первого значения для приведения датчика в резонансное состояние, когда объект не расположен в электромагнитном поле;
регулирования регулируемой емкости до второго значения для приведения датчика в резонансное состояние, когда объект расположен в электромагнитном поле; и
определения величины емкости, наведенной в датчике, как разности между первым и вторым значениями.
10. Способ определения электрической проводимости, содержащий этапы, на которых:
излучают электромагнитное поле в направлении объекта, так что электромагнитное поле взаимодействует с объектом;
регулируют фазовый угол тока, проходящего через датчик, с помощью регулируемого емкостного элемента, соединенного с датчиком;
производят измерения напряжения, соответствующего напряжению на датчике;
производят измерение тока, соответствующего току, проходящему через датчик;
рассчитывают комплексную проводимость датчика на основании измерения напряжения и измерения тока; и
определяют электрическую проводимость объекта на основании рассчитанной комплексной проводимости датчика;
причем электрическую проводимость объекта определяют, когда датчик не находится в резонансном состоянии.
11. Способ по п. 10, дополнительно содержащий операцию сохранения данных, соответствующих калибровочной кривой, в запоминающем устройстве, причем калибровочная кривая включает корреляцию предыдущих значений комплексной проводимости датчика и значений электрической проводимости множества известных материалов.
12. Способ по п. 11, также содержащий операцию определения электрической проводимости объекта путем корреляции рассчитанной комплексной проводимости датчика со значением электрической проводимости с помощью калибровочной кривой.
13. Способ по п. 10, также содержащий этап расчета комплексной проводимости датчика путем расчета вещественной части комплексной проводимости датчика и игнорирования мнимой части комплексной проводимости датчика.
14. Способ по п. 10, также содержащий этап определения фазового угла тока, проходящего через датчик, и комплексного сопротивления датчика на основании произведенных измерений напряжения и измерения тока.
15. Способ по п. 14, также содержащий этап, на котором рассчитывают величину поправки значения фазового угла для фазового угла тока, проходящего через датчик.
16. Способ по п. 15, также содержащий этап, на котором регулируют емкостный элемент, так чтобы значение фазового угла минус величина поправки значения фазового угла находилось в предварительно определенном интервале значений фазового угла.
17. Контроллер для определения электрической проводимости объекта, содержащий:
процессор; и
запоминающее устройство, соединенное с процессором и выполненное с возможностью сохранения множества программных модулей, включающих:
модуль расчета фазового угла, выполняемый процессором, для:
получения измерения тока, соответствующего току, проходящему через датчик;
получения измерения напряжения, соответствующего напряжению на датчике; и
расчета фазового угла тока, проходящего через датчик, на основании измерения тока и измерения напряжения;
модуль расчета комплексного сопротивления, выполняемый процессором, для:
получения измерения тока; получения измерения напряжения; и
расчета комплексного сопротивления датчика на основании измерения тока и измерения напряжения;
модуль расчета комплексной проводимости, выполняемый процессором для расчета комплексной проводимости датчика на основании рассчитанного значения фазового угла и рассчитанного значения комплексного сопротивления; и
модуль расчета электрической проводимости, выполняемый процессором для определения электрической проводимости объекта на основании рассчитанной комплексной проводимости датчика;
причем контроллер выполнен с возможностью определения электрической проводимости объекта, когда датчик не находится в резонансном состоянии.
18. Контроллер по п. 17, отличающийся тем, что процессор выполнен с возможностью расчета величины поправки значения фазового угла для фазового угла тока, проходящего через датчик.
19. Контроллер по п. 18, отличающийся тем, что модуль расчета комплексной проводимости выполняется процессором, чтобы:
вычесть величину поправки значения фазового угла из значения фазового угла, чтобы получить отрегулированное значение фазового угла; и
рассчитать комплексную проводимость датчика на основании комплексного сопротивления датчика и отрегулированного значения фазового угла.
| US 2010219841 A1, 02.09.2010 | |||
| US 5872454 A, 16.02.1999 | |||
| US 6388453 B1, 14.05.2002 | |||
| Роторный топливовпрыскивающий насос | 1977 |
|
SU826972A3 |

