ОБЛАСТЬ ТЕХНИКИ
Способы и устройства, согласующиеся с иллюстративными вариантами осуществления, относятся к гибкому устройству и, в частности, к гибкому устройству, которое обеспечивает интерактивное руководство по изгибу, соответствующее изгибанию, и соответствующему способу управления.
УРОВЕНЬ ТЕХНИКИ
С развитием электронных технологий, разрабатывались различные типы устройств отображения. В частности, такие устройства отображения, как телевизоры (TV), персональные компьютеры (PC), портативные компьютеры, планшетные PC, сотовые телефоны или MP3-проигрыватели, получили широкое распространение и используются большинством семей в домашних условиях.
С недавних пор, для удовлетворения потребностей пользователей, когда пользователи запрашивают более новые и разнообразные функции, предпринимаются усилия для разработки устройств отображения в обновленной форме. Так называемые 'дисплеи нового поколения' являются одним из плодов этих усилий.
В число дисплеев нового поколения входит гибкое устройство отображения. Гибкое устройство отображения означает устройство, обладающее возможностями изгиба.
Гибкое устройство отображения может легко изгибаться, чем отличается от устройств отображения, известных из уровня техники. Соответственно, можно применять различные способы ввода с использованием возможностей изгиба, отличные от известных из уровня техники. Когда применяются способы ввода с изгибанием, пользователь может управлять операциями устройства, изгибая одну часть гибкого устройства отображения. Например, когда пользователь изгибает краевую часть, может осуществляться операция переворачивания страницы с переходом к следующей странице.
Соответственно, для управления гибким устройством отображения с помощью операции изгиба, пользователь должен знать типы изгибания и соответствующие операции. Однако когда пользователем является ребенок или старик, не привыкший вводить операции изгиба, пользователь может испытывать затруднения в понимании способов ввода. Кроме того, когда обеспечены функции, согласованные с различные типами изгибания, даже обычный пользователь может сталкиваться с проблемой эффективности использования операций изгиба. Таким образом, необходима технология эффективного использования изгибания.
РАСКРЫТИЕ ИЗОБРЕТЕНИЯ
Техническая задача
Иллюстративные варианты осуществления настоящей заявки преодолевают вышеуказанные недостатки и другие недостатки, не описанные выше. Кроме того, иллюстративные варианты осуществления не требуются для преодоления вышеописанных недостатков, и иллюстративный вариант осуществления могут не преодолевать ни одной из вышеописанных проблем.
Согласно иллюстративному варианту осуществления, технической задачей является обеспечение гибкого устройства, которое обеспечивает пользователю интерактивное руководство по изгибу, чтобы пользователю было легко распознавать поддерживаемое изгибание, и соответствующего способа управления.
Решение задачи
Согласно иллюстративному варианту осуществления, предусмотрено гибкое устройство, которое может включать в себя датчик, выполненный с возможностью регистрации изгибания, которое деформирует форму гибкого устройства, и контроллер, выполненный с возможностью осуществления операции управления, соответствующей изгибанию, когда регистрируется предварительно заданная операция изгиба.
Контроллер может добавлять и обеспечивать интерактивное руководство по изгибу в отношении изгиба, который задан относительно каждого из объектов, которые отображаются на экране.
В одном иллюстративном варианте осуществления, гибкое устройство может дополнительно включать в себя интерфейс, который выполняет соединение с устройством отображения. Контроллер может передавать информацию, касающуюся объектов и интерактивного руководства по изгибу, добавленного к объектам, и передавать сигналы управления, предписывающие выполнять операцию управления, соответствующую изгибанию, устройству отображения, когда регистрируется изгибание.
Гибкое устройство может дополнительно включать в себя графический процессор, который формирует экран, включающий в себя, по меньшей мере, один из объектов, соответственно, дополненных интерактивным руководством по изгибу, и дисплей, который отображает экран.
Интерактивное руководство по изгибу может визуально выражать изгибание, уникально заданное в отношении каждого объекта.
Интерактивное руководство по изгибу может визуально выражать изгибание, по-разному заданное согласно отображаемой позиции каждого объекта на экране.
Когда экран преобразуется, контроллер может одинаково задавать изгибание, которое предварительно задано относительно каждой отображаемой позиции каждого объекта на экране, новым объектам, которые вновь отображаются после преобразования согласно их отображаемой позиции, и добавлять и отображать для новых объектов интерактивное руководство по изгибу в отношении изгиба, заданного относительно новых объектов.
Кроме того, объектами могут быть пиктограммы приложения, и контроллер может реализовывать приложение, соответствующее объектам, когда регистрируется изгиб, заданный относительно этих объектов.
Экран может включать в себя область ввода для ввода знаков или символов, объекты могут представлять собой объекты, которые выбирают кнопки для ввода знаков и символов, и контроллер может отображать знаки или символы, соответствующие объекту на области ввода, когда регистрируется изгиб, заданный относительно этого объекта.
Интерактивное руководство по изгибу может включать в себя руководство в виде изображения линии, в котором, по меньшей мере, одно из ширины линии, количества линий, формы линии, направления линии, позиции линии, угла линии, цвета линии, размера линии и длины линии можно регулировать согласно характеристике изгибания.
Интерактивное руководство по изгибу может дополнительно включать в себя, по меньшей мере, одно из знакового руководства (руководства в виде знаков) и символьного руководства (руководства в виде символов), которые отображаются с руководством в виде изображения линии.
В одном иллюстративном варианте осуществления, предусмотрен способ управления гибким устройством, который может включать в себя этапы, на которых: обеспечивают экран, который содержит объект, объединенный с интерактивным руководством по изгибу в отношении изгиба, регистрируют изгибание, которое деформирует форму гибкого устройства, и обеспечивают операцию, соответствующую объекту, когда регистрируется изгиб, заданный относительно объекта, отображаемого на экране.
Обеспечение экрана может включать в себя передачу информации, касающейся объекта и интерактивного руководства по изгибу, добавленного к этому объекту, на устройство отображения, которое подключено к гибкому устройству, и отображение экрана посредством устройства отображения.
Обеспечение экрана может дополнительно включать в себя формирование экрана, который содержит один или более объектов, соответственно, дополненных интерактивным руководством по изгибу, и отображение экрана посредством дисплея, смонтированного на гибком устройстве.
Интерактивное руководство по изгибу может визуально выражать изгибание, уникально заданное в отношении каждого объекта.
Интерактивное руководство по изгибу может визуально выражать изгибание, по-разному заданное согласно позиции маркировки каждого объекта на экране.
Способ управления может дополнительно включать в себя, когда осуществляется преобразование экрана, одинаковое задание изгибания, которое предварительно задано относительно каждой отображаемой позиции каждого объекта на экране до преобразования, новым объектам, которые вновь отображаются после преобразования согласно их отображаемой позиции, и добавление и отображение для новых объектов интерактивного руководства по изгибу в отношении изгиба, заданного относительно новых объектов.
Объектами могут быть пиктограммы приложения, и осуществление операций может включать в себя реализацию приложения, соответствующего объекту, когда регистрируется изгиб, заданный относительно этого объекта.
Экран может включать в себя область ввода для ввода знаков или символов, объекты могут выражать кнопки выбора для ввода знаков или символов, и осуществление операций может включать в себя отображение знаков или символов, соответствующих объекту на области ввода, когда регистрируется изгиб, заданный относительно этого объекта.
Интерактивное руководство по изгибу может включать в себя руководство в виде изображения линии, в котором, по меньшей мере, одно из ширины линии, количества линий, формы линии, направления линии, позиции линии, угла линии, цвета линии, размера линии и длины линии можно регулировать согласно характеристике изгибания.
Интерактивное руководство по изгибу может дополнительно включать в себя, по меньшей мере, одно из знакового руководства и символьного руководства, которые отображаются с руководством в виде изображения линии.
В одном иллюстративном варианте осуществления, предусмотрен способ работы устройства отображения, который может включать в себя отображение объектов, дополненных интерактивными руководствами по изгибу, прием сигнала управления, соответствующего изгибанию, от гибкого устройства, которое является изгибаемым, и осуществление операции управления согласно сигналу управления. Интерактивное руководство по изгибу может быть руководством в виде изображения, которое визуально выражает изгиб, заданный в отношении каждого объекта.
ПОЛОЖИТЕЛЬНЫЕ ЭФФЕКТЫ ИЗОБРЕТЕНИЯ
Согласно различным иллюстративным вариантам осуществления, пользователь может легче распознавать изгибание и операции, подлежащие осуществлению согласно изгибанию, посредством интерактивного руководства по изгибу. Таким образом, гибкое устройство можно использовать более удобно и эффективно.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
Вышеперечисленные и/или другие аспекты заявки поясняются в описании некоторых иллюстративных вариантов осуществления со ссылкой на прилагаемые чертежи, в которых:
фиг. 1 - блок-схема гибкого устройства согласно иллюстративному варианту осуществления;
фиг. 2 - блок-схема гибкого устройства отображения согласно иллюстративному варианту осуществления;
фиг. 3 - схема, которая подробно иллюстрирует конструкцию дисплея 150, смонтированного с гибким устройством отображения, показанным на фиг. 2;
фиг. 4-26 - схемы, которые демонстрируют различные иллюстративные варианты осуществления конструкции устройства отображения для регистрации ситуаций изгиба в гибком устройстве и способы их регистрации;
фиг. 27 демонстрирует пример экрана, отображаемого на гибком устройстве отображения, показанном на фиг. 2;
фиг. 28 демонстрирует другой пример экрана, отображаемого на гибком устройстве отображения, показанном на фиг. 2;
фиг. 29 демонстрирует пример способа отображения интерактивного руководства по изгибу при преобразовании экрана;
фиг. 30 демонстрирует другой пример способа отображения интерактивное руководство по изгибу при преобразовании экрана;
фиг. 31-38 демонстрируют различные иллюстративные варианты осуществления интерактивного руководства по изгибу;
фиг. 39 - схема, обеспеченная для объяснения гибкого устройства, которое управляет операциями устройства отображения согласно другому примерному варианту осуществления;
фиг. 40 - блок-схема гибкого устройства согласно иллюстративному варианту осуществления, показанному на фиг. 39;
фиг. 41 - блок-схема операций, которая иллюстрирует способ управления гибкого устройства согласно различным иллюстративным вариантам осуществления;
фиг. 42 - блок-схема гибкого устройства согласно различным иллюстративным вариантам осуществления;
фиг. 43 - структурная карта программного обеспечения, которое можно использовать в гибком устройстве, показанном на фиг. 42;
фиг. 44 демонстрирует внешний состав гибкого устройства согласно иллюстративному варианту осуществления;
фиг. 45 демонстрирует источник электропитания, который подключен к гибкому устройству согласно иллюстративному варианту осуществления;
фиг. 46 демонстрирует способ обратной связи в ответ на неправильное изгибание согласно иллюстративному варианту осуществления; и
фиг. 47 демонстрирует пример экрана дисплея в иллюстративном варианте осуществления, который отображает интерактивное руководство по изгибу согласно тому, держит ли пользователь устройство.
ПРЕДПОЧТИТЕЛЬНЫЕ ВАРИАНТЫ ОСУЩЕСТВЛЕНИЯ ИЗОБРЕТЕНИЯ
Некоторые иллюстративные варианты осуществления будут описано ниже более подробно со ссылкой на прилагаемые чертежи.
В нижеследующем описании, одинаковые ссылочные позиции на чертежах используются для одинаковых элементов даже в разных чертежах. Предметы, заданные в описании, например, подробная конструкция и элементы, обеспечены для облегчения полного понимания концепции настоящего изобретения. Соответственно, очевидно, что иллюстративные варианты осуществления концепции настоящего изобретения могут осуществляться без этих конкретно заданных предметов. Кроме того, общеизвестные функции или конструкции не описаны подробно, чтобы не перегружать иллюстративные варианты осуществления ненужными деталями.
Со ссылкой на прилагаемые чертежи, иллюстративные варианты осуществления будут подробно описаны ниже.
На Фиг. 1 показана блок-схема гибкого устройства согласно иллюстративному варианту осуществления. Гибкое устройство 100, показанное на фиг. 1, имеет параметры, с которыми устройство изгибается в соответствии с интенсивностью и направлением внешней силы, когда сила обеспечивается извне.
Согласно фиг. 1, гибкое устройство 100 включает в себя датчик 110 и контроллер 120. Датчик 110 регистрирует изгибание, которое изгибает гибкое устройство 100. Используемый здесь термин 'изгибание' указывает действие пользователя, которое заставляет основной корпус гибкого устройства 100 изгибаться, принимая конкретную форму.
Контроллер 120 осуществляет операцию управления, соответствующую операции изгиба, когда регистрируется предварительно заданное изгибание. Операция управления может задаваться по-разному согласно типам и параметрам гибкого устройства 100. Например, когда гибкое устройство 100 является гибким устройством отображения, включающим в себя дисплей (не показан), контроллер 120 осуществляет операцию управления, которая включает гибкое устройство 100, когда регистрируется изгибание, соответствующее действию включения. Когда гибкое устройство 100 реализуется как пульт дистанционного управления, который управляет внешним устройством отображения, контроллер 120 генерирует сигналы управления для включения внешнего устройства отображения и передает сигналы управления на внешнее устройство отображения, когда регистрируется изгибание, соответствующее действию включения.
Контроллер 120 обеспечивает интерактивное руководство по изгибу для выражения или отображения изгибания. Используемый здесь термин 'интерактивное руководство по изгибу' указывает визуальное руководство в виде изображения, подлежащее отображению, что позволяет пользователю интуитивно распознавать формы гибкого устройства 100, которое может изгибаться. Интерактивное руководство по изгибу может перекрываться и выражаться объектами, отображаемыми на экране. В частности, интерактивное руководство по изгибу может отображаться и отображаться поверх соответствующих объектов, отображаемых на экране, например, пиктограмм приложения, меню или кнопок.
Как описано выше, гибкое устройство 100 можно реализовать как гибкое устройство отображения, включающее в себя дисплей или простое гибкое устройство, подключенное к внешнему устройству отображения. При реализации как устройство, подключенное к внешнему устройству отображения, интерактивное руководство по изгибу может отображаться с объектами на экране внешнего устройства отображения. Соответствующие иллюстративные варианты осуществления будут конкретно объяснены в нижеследующей части описания изобретения; иллюстративный вариант осуществления, в котором гибкое устройство реализуется как гибкое устройство отображения, будет конкретно объяснен ниже.
На Фиг. 2 показана блок-схема гибкого устройства отображения согласно иллюстративному варианту осуществления. Под гибким устройством отображения подразумевается устройство, которое можно искривлять, изгибать, складывать или скатывать как бумагу, сохраняя при этом свойства дисплея, которыми обладают другие устройства отображения.
Согласно фиг. 2, гибкое устройство 100 отображения включает в себя датчик 110, контроллер 120, графический процессор 130, хранилище 140 и дисплей 150.
Датчик 110 предназначен для регистрации операции изгиба, вводимой для изгибания гибкого устройства отображения. Изгибание может включать в себя 'изгибание и выпрямление', которое изгибает и распрямляет, 'изгибание и удержание', которое сохраняет изогнутую ситуацию, 'кручение', которое скручивает гибкое устройство отображения, 'складывание', которое складывает устройство, 'скатывание', которое скатывает устройство в одном направлении, 'встряхивание', которое встряхивает устройство одной рукой, удерживая устройство, и 'качание', которое качает устройство обеими руками, удерживая устройство. Датчик 110 может регистрировать изгибание устройства отображения с использованием соответствующих датчиков, смонтированных по всей площади гибкого устройства 100 отображения. Конкретные способы регистрации будут описаны ниже.
Контроллер 120 определяет, является ли изгибание изгибанием предварительно заданной формы, когда изгибание регистрируется датчиком 110. Когда изгибание является предварительно заданной формой, контроллер 120 осуществляет операцию управления, соответствующую изгибанию.
Информация, касающаяся изгибания, и информация, касающаяся операций управления, соответствующих изгибанию, может храниться в хранилище 140. Контроллер 120 может осуществлять операции управления на основании информации, хранящейся в хранилище 140.
Графический процессор 130 строит экран, включающий в себя, по меньшей мере, один из объектов, к которым, соответственно, добавляется интерактивное руководство по изгибу. В данном случае, объекты можно реализовать как различные типы, например, меню и кнопки, а также пиктограммы приложения.
Графический процессор 130 вычисляет значения ситуации отображения интерактивного руководства по изгибу согласно типам объектов. Значения ситуации отображения могут быть различными значениями признаков, например, позицией, форматом, размером и цветом объектов, которым будет помечено интерактивное руководство по изгибу. Графический процессор 130 генерирует интерактивное руководство по изгибу путем визуализации на основании вычисленных значений, когда вычисляются значения ситуации отображения.
Интерактивное руководство по изгибу можно уникально задавать в отношении каждого объекта или для каждой позиции маркировки на экране. Способы маркировки и типы объектов и интерактивного руководства по изгибу будут описаны ниже.
Дисплей 150 отображает экран, сформированный графическим процессором 130. Дисплей 150 может быть смонтирован на передней поверхности гибкого устройства отображения, и может отображать соответствующие экраны. Дисплей 150 состоит из гибких материалов и может свободно деформироваться.
На Фиг. 3 показана схема, обеспеченная для объяснения примера дисплея 150.
Согласно фиг. 3, дисплей 150 включает в себя подложку 151, схему 152 возбуждения, отображающую панель 153 и защитный слой 154.
Подложку 151 можно реализовать в виде пластмассовой подложки, например, полимерной пленки, которая может деформироваться под действием внешнего давления. Пластмассовая подложка имеет конструкцию, в которой обе стороны пленки основы обработаны барьерным покрытием. Пленку основы можно реализовать в виде смолы, например, полиимида (PI), поликарбонита (PC), полиэтилентерефталата (PET), полиэфирсульфона (PES), полиэтиленнафталата (PEN) или волокнита (FRP). Барьерное покрытие осуществляется на сторонах, обращенных друг к другу в пленке основы, и для поддержания гибкости можно использовать органическую пленку или неорганическую пленку.
Материалы, имеющие гибкие свойства, например, тонкое стекло или металлическую фольгу, можно использовать для подложки 151, а также пластмассовую подложку.
Схема 152 возбуждения осуществляет функцию возбуждения отображающей панели 153. В частности, схема 152 возбуждения подает возбуждающее напряжение на множество пикселей, формирующих отображающую панель 153, и может быть реализована в виде TFT из аморфного кремния, TFT из низкотемпературного поликремния (LTPS), органических TFT (OTFT). Схему 152 возбуждения можно реализовать как различные типы согласно типам реализации отображающей панели 153. Например, отображающая панель 153 может состоять из органического излучающего диода, который формирует множество пиксельных ячеек и электрод, который покрывает обе стороны органического излучающего диода. В этом случае, схема 152 возбуждения может включать в себя множество транзисторов, соответствующих каждой из пиксельных ячеек в отображающей панели 153. Контроллер 120 излучает пиксельные ячейки, подключенные к транзисторам, одобряя электрические сигналы на затворы соответствующих транзисторов. Таким образом, может отображаться изображение.
Кроме того, отображающая панель 153 можно реализовать как EL, электрофоретический дисплей (EPD), электрохромный дисплей (ECD), жидкокристаллический дисплей (LCD), AMLCD, и плазменная отображающая панель (PDP), а также органический излучающий диод. Однако, при реализации в виде LCD, может потребоваться отдельная задняя подсветка, поскольку LCD не может самостоятельно излучать свет. Когда задняя подсветка не предусмотрена, источники окружающего света используются совместно с LCD. Таким образом, для использования ЖК отображающей панели 153 без задней подсветки, условия, в которых количество света существенно, необходимо обеспечить, например, наружную среду.
Защитный слой 154 осуществляет функцию, которая защищает отображающую панель 153. Для защитного слоя 154 можно использовать такие материалы, как ZrO, CeO2 или ThO2. Защитный слой 154 может быть изготовлен в формате прозрачной пленки и покрывать всю поверхность отображающей панели 153.
Кроме того, в отличие от иллюстрации фиг. 3, дисплей 150 можно реализовать в виде электронной бумаги. Электронная бумага это дисплей, в котором применяются свойства обычных чернил, используемых в бумаге, и отличается использованием отражающих источников света по сравнению с плоскими дисплеями, известными из уровня техники. Электронная бумага может изменять изображения или знаки с использованием крученых шаров или электрофореза с капсулами.
Дисплей 150 можно реализовать как устройство отображения, которое может изгибаться, сохраняя при этом прозрачность. Например, когда подложка 151 реализуется в виде полимерного материала, например, пластмасс, имеющих прозрачные свойства, схему 152 возбуждения можно реализовать как прозрачный транзистор, и отображающую панель 153 можно реализовать как прозрачный органический излучающий диод и прозрачный электрод, и прозрачность может сохраняться. Прозрачный транзистор может представлять собой транзистор, который изготавливается путем замены непрозрачного кремния тонкопленочных транзисторов, известных из уровня техники, прозрачными материалами, например, оксидом цинка или оксидом титана. Кроме того, для прозрачного электрода можно использовать новые материалы, например, оксид индия-олова (ITO) или графен.
Графен представляет собой материал, плоскостно-структурированный в формате улья, путем соединения атомов углерода, и имеющий прозрачные свойства. Кроме того, прозрачный органический излучающий диод можно реализовать с помощью различных материалов.
Согласно вышеизложенному, дисплей 150 можно реализовать в различных составах. Датчик 110 может быть смонтирован на краю или в нижней части дисплея 150 и регистрировать ситуации изгиба гибкого устройства отображения, которое включает в себя дисплей 150. В дальнейшем будет конкретно описан способ регистрации ситуации изгиба в датчике 110.
Различные иллюстративные варианты осуществления способа регистрации изгибания в гибком устройстве отображения
На фиг. 4-6 показаны схемы, которые демонстрируют пример способа регистрации деформации в гибком устройстве отображения, т.е. изгибания.
Гибкое устройство 100 отображения может деформироваться в отношении формы, изгибаясь под действием внешнего давления. 'Изгибание' может включать в себя нормальное изгибание, складывание, скатывание и особое изгибание. 'Нормальное изгибание' указывает ситуацию, в которой гибкое устройство отображения изгибается. В частности, изгибание и выпрямление, и изгибание и удержание могут быть включены в нормальное изгибание.
'Складывание' указывает ситуацию, в которой гибкое устройство отображения складывается. В данном случае, складывание и нормальное изгибание можно отличать друг от друга согласно степеням изгибания. Например, когда изгибание выходит за пределы определенного угла изгиба, ситуацию можно определить как складывание. Когда изгибание находится в пределах определенного угла изгиба, ситуацию можно определить как нормальное изгибание.
'Скатывание' это ситуация, в которой гибкое устройство отображения сворачивается. Скатывание также можно определять на основании угла изгиба. Например, скатывание можно определить как ситуация, в которой изгибание сверх определенного угла изгиба регистрируется по определенной области. При этом складывание можно определить как ситуацию, в которой изгибание в пределах определенного угла изгиба регистрируется в сравнительно малой области.
Нормальное изгибание, складывание и скатывание, описанные выше, можно определять на основании радиуса кривизны, а также угла изгиба.
Кроме того, независимо от радиуса кривизны, скатывание можно определить как ситуацию, в которой вид в разрезе скатанного гибкого устройства 100 отображения является, по существу, круглым или близким к эллипсу.
Кроме того, 'особое изгибание' может указывать различные другие типы изгибания, например, кручение, встряхивание и качание. Особое изгибание можно определять на основании угла изгиба, количества областей изгиба, картины распределения областей изгиба и радиуса кривизны.
Однако вышеприведенные определения, касающиеся различных типов деформаций, являются всего лишь одним из иллюстративных вариантов осуществления; и деформации можно задавать по-разному согласно типам, размерам, весам и признакам гибкого устройства отображения. Например, когда гибкое устройство отображения может изгибаться таким образом, что две поверхности контактируют друг с другом, складывание можно определить как ситуацию, в которой поверхности устройства контактируют друг с другом, одновременно изгибаясь. Напротив, скатывание можно определить как ситуацию, в которой передняя сторона и задняя сторона гибкого устройства отображения касаются друг друга вследствие изгибания.
Для удобства объяснения, вышеупомянутые различные типы изгибания и другая форма изгиба будут репрезентативно именоваться 'изгибанием' в целом на протяжении описания.
Гибкое устройство 100 отображения может регистрировать изгибание различными способами.
Например, датчик 110 может включать в себя датчик изгиба, который смонтирован на одной поверхности, например, на передней стороне или задней стороне или на обеих сторонах. Контроллер 120 может регистрировать изгибание с использованием значений, регистрируемых в датчике изгиба.
В данном случае, датчик изгиба означает датчик, который может изгибаться внутрь самого себя и который имеет изменяющиеся значения сопротивления согласно степеням изгибания. Датчик изгиба можно реализовать в различных типах, например, оптоволоконный датчик изгибания, датчик давления или тензодатчик.
Датчик 110 может регистрировать значения сопротивления с использованием величины напряжения, подаваемого на датчик изгиба или величины электрического тока, текущего через датчик изгиба, и может регистрировать ситуацию изгиба в позиции соответствующего датчика изгиба согласно значениям сопротивления.
Хотя фиг. 4 показывает, что датчик изгиба внедрен в переднюю сторону дисплея 150, это является всего лишь иллюстрацией. Соответственно, датчик изгиба может быть внедрен в заднюю сторону дисплея 150 или в обе стороны. Кроме того, форма, количество и позиция размещения датчика изгиба могут изменяться по-разному. Например, один датчик изгиба или множество датчиков изгиба могут объединяться с дисплеем 150. В данном случае, один датчик изгиба может регистрировать одни данные изгибания. Однако один датчик изгиба может иметь множество каналов регистрации, которые регистрируют множество данных изгибания.
Фиг. 4 показывает, что множество датчиков изгиба в формате бруска располагается горизонтально и вертикально, формируя структуру наподобие кристаллической решетки.
Согласно фиг. 4, датчик изгиба включает в себя датчики 21-1 - 21-5 изгиба, которые располагаются в первом направлении, и датчики 22-1 - 22-5 изгиба, которые располагаются во втором направлении, ортогональном первому направление. Каждый датчик изгиба может располагаться с определенным интервалом.
Хотя фиг. 4 показывает, что 5 датчиков 21-1 - 21-5, 22-1 - 22-5 изгиба расположенных, соответственно, в горизонтальном направлении и вертикальном направлении, это является всего лишь иллюстрацией. Количество датчиков изгиба может изменяться согласно размеру гибкого устройства отображения. Соответственно, датчики изгиба располагаются горизонтально и вертикально для того, чтобы регистрировать изгибания, возникающие на всех областях гибкого устройства отображения. Когда устройство обладает гибкостью на части области гибкого устройства отображения, или имеет необходимость в регистрации только изгибания, осуществляемого на определенной части области, датчики изгиба могут выборочно располагаться на соответствующих частях.
Каждый из датчиков 21-1 - 21-5, 22-1 - 22-5 изгиба можно реализовать как электрический резистивный датчик, который использует электрическое сопротивление, или микрооптоволоконный датчик, который использует скорость деформации оптических волокон. Для удобства объяснения, в нижеследующем описании мы будем исходить из того, что датчики изгиба реализованы в виде электрического резистивного датчика.
В частности, как показано на фиг. 5, когда гибкое устройство 100 отображения изгибается таким образом, что центральная область, расположенная в центре на основании левой и правой границ в гибком устройстве 100 отображения, может быть направлена вниз, натяжение, обусловленное изгибанием, сообщается датчикам 21-1 - 21-5 изгиба, которые располагаются горизонтально. Соответственно, значения сопротивления датчиков 21-1 - 21-5 изгиба, которые располагаются горизонтально, могут отличаться друг от друга. Датчик 110 может регистрировать, что изгибание производится горизонтально на основании центра отображающей поверхности, регистрируя изменения в выходных значениях, выводимых из каждого из датчиков 21-1 - 21-5 изгиба. Хотя фиг. 5 демонстрирует ситуацию изгиба, в которой центральная область направлена в нижнем ортогональном направлении на основании отображающей поверхности (направлении -Z, подлежащем использованию в нижеследующем рассмотрении), изгибание может регистрироваться на основании изменений в выходных значениях горизонтальных датчиков 21-1 - 21-5 изгиба, когда изгибание производится в верхнем ортогональном направлении на основании отображающей поверхности (направлении +Z, подлежащем использованию в дальнейшем).
Кроме того, согласно фиг. 6, когда гибкое устройство 100 отображения изгибается таким образом, что центральная область, расположенная в центре на основании верхней и нижней границ, направлена вверх, натяжение сообщается датчикам 22-1 - 22-5 изгиба, которые располагаются вертикально. Датчик 110 может регистрировать вертикальную деформацию на основании выходных значений датчиков 22-1 - 22-5 изгиба, которые располагаются вертикально. Хотя фиг. 6 демонстрирует изгибание в направлении +Z, изгибание в направлении -Z может регистрироваться с использованием датчиков 22-1 - 22-5 изгиба, которые располагаются вертикально.
Когда деформация производится в диагональном направлении, натяжение сообщается всем горизонтальным и вертикальным датчикам изгиба. Таким образом, деформация в диагональном направлении может регистрироваться на основании выходных значений горизонтального и вертикального датчиков изгиба.
В дальнейшем, будет описан конкретный способ регистрации деформаций, например, нормального изгибания, складывания и скатывания с использованием датчиков изгиба.
На Фиг. 7-9 показаны схемы, которые демонстрируют способ регистрации изгибания в гибком устройстве отображения с использованием датчиков изгиба согласно иллюстративному варианту осуществления.
Фиг. 7 демонстрирует вид в разрезе гибкого устройства 100 отображения, когда гибкое устройство отображения изгибается.
Когда гибкое устройство 100 отображения изгибается, датчики изгиба, которые располагаются на одной стороне или обеих сторонах гибкого устройства отображения, изгибаются совместно с гибким устройством отображения и имеют значения сопротивления, соответствующие интенсивности сообщаемого натяжения, и выводят соответствующие выходные значения.
Например, когда гибкое устройство 100 отображения изгибается, как показано на фиг. 7, датчик 31-1 изгиба, расположенный на задней стороне гибкого устройства 100 отображения, также изгибается, и выводит значения сопротивления согласно интенсивности сообщаемого натяжения, обусловленного изгибанием.
В этом случае, интенсивность натяжения возрастает пропорционально степени изгиба. Например, когда изгибание производится, как показано на фиг. 7, степень изгиба максимальна в центральной области. Таким образом, максимальное натяжение сообщается датчику 31-1 изгиба, который располагается в центральной области (т.е. точке a3), и датчик 31-1 изгиба имеет максимальные значения сопротивления. Напротив, степень изгиба ослабевает в направлении наружу. Таким образом, датчик 31-1 изгиба имеет меньшие значения сопротивления в направлении точек a2 и a1 или точек a4 и a5, а не точки a3.
Когда значения сопротивления, выводимые из датчика изгиба, имеют максимальное значение в конкретной точке и снижается в направлениях обоих концов, датчик 110 может определять, что область, где обнаружено максимальное значение сопротивления, является областью, где производится наибольшее изгибание. Кроме того, датчик 110 может определять область, где значения сопротивления не изменяются, как плоская область, где изгибание не производится, и определять область, где значения сопротивления изменяются, выходя за пределы предварительно определенного значения, как область изгиба, где производится некоторое изгибание.
На Фиг. 8 и 9 показаны схемы, которые демонстрируют способ задания области изгиба согласно иллюстративному варианту осуществления. Согласно фиг. 8 и 9, поскольку они призваны иллюстрировать, что гибкое устройство отображения изгибается в горизонтальном направлении на основании передней стороны, датчики изгиба, расположенные вертикально, не показаны для удобства объяснения. Кроме того, для удобства объяснения, ссылочные позиции датчиков изгиба на чертежах обеспечены, соответственно, по-разному согласно чертежам; однако датчики изгиба, представленные на фиг. 4, по существу, используются как они есть.
'Область изгиба' это область, где гибкое устройство отображения искривляется и изгибается. Поскольку датчики изгиба изгибаются совместно посредством изгибания, область изгиба можно определить как область всех точек, где располагаются датчики изгиба, выводящие разные значения сопротивления.
Датчик 110 может регистрировать размер линий изгиба, направление линий изгиба, позицию линий изгиба, количество линий изгиба, количество изгибания, скорость изгибания, с которой изменяется форма, размер области изгиба, позицию области изгиба, и количество областей изгиба на основании отношений между точками с измененными значениями сопротивления.
В частности, когда расстояние между точками с измененными значениями сопротивления не превышает предварительно определенное значение, каждая из точек, выводящих значения сопротивления, обнаруживается как одна область изгиба. При наличии точек с измененными значениями сопротивления, разнесенных свыше предварительно определенного расстояния, область можно делить и задавать как области изгиба, отличающиеся друг от друга на основании этих точек. Дальнейшее объяснение приведено со ссылкой на фиг. 8 и 9.
На Фиг. 8 показана схема, которая иллюстрирует способ регистрации одна область изгиба. Согласно фиг. 8, когда гибкое устройство 100 отображения изгибается, точки a1-a5 датчика 31-1 изгиба, точки b1-b5 датчика 31-2 изгиба, точки c1-c5 датчика 31-3 изгиба, точки d1-d5 датчика 31-4 изгиба, и точки e1-e5 датчика 31-5 изгиба отличаются значениями сопротивления от первоначального состояния.
В этом случае, точки с измененными значениями сопротивления в датчиках 31-1 - 31-5 изгиба располагаются в пределах предварительно определенного расстояния и располагаются последовательно.
Таким образом, датчик 110 регистрирует область 32, включающую в себя все точки a1-a5 датчика 31-1 изгиба, точки b1-b5 датчика 31-2 изгиба, точки c1-c5 датчика 31-3 изгиба, точки d1-d5 датчика 31-4 изгиба, и точки e1-e5 датчика 31-5 изгиба как одну область изгиба.
На Фиг. 9 показана схема, которая иллюстрирует способ регистрации множества областей изгиба.
Согласно фиг. 9, согласно изгибанию гибкого устройства отображения, точки a1-a5 датчика 31-1 изгиба, точки b1-b5 датчика 31-2 изгиба, точки c1-c5 датчика 31-3 изгиба, точки d1-d5 датчика 31-4 изгиба, и точки e1-e5 датчика 31-5 изгиба отличаются значениями сопротивления от первоначального состояния.
На датчике 31-1 изгиба, точки a1-a2 и точки a4-a5, соответственно, продолжаются на основании каждой точки. Однако точки a2-a4 не продолжаются, поскольку между точкой a2 и точкой a4 существует точка a3. Таким образом, когда считается, что точки a2-a4 смещены на предварительно определенное расстояние, можно определять, что область между точкой a1 и точкой a2 и область между точкой a4 и точкой a5 являются областями изгиба, отличающимися друг от друга. Кроме того, точки других датчиков 31-1 - 31-5 изгиба могут делиться аналогично.
Таким образом, гибкое устройство 100 отображения может задавать область 34, включающую в себя все точки a1-a2 датчика 31-1 изгиба, точки b1-b2 датчика 31-2 изгиба, точки c1-c2 датчика 31-3 изгиба, точки d1-d2 датчика 31-4 изгиба и точки e1-e2 датчика 31-5 изгиба, как одну область изгиба, и область 35, включающую в себя все точки a4-a5 датчика 31-1 изгиба, точки b4-b5 датчика 31-2 изгиба, точки c4-c5 датчика 31-3 изгиба, точки d4-d5 датчика 31-4 изгиба и точки e4-e5 датчика 31-5 изгиба как другую область изгиба.
Область изгиба может включать в себя линии изгиба. 'Линии изгиба' можно определить как линии, соединяющие точки с максимальными обнаруженными значениями сопротивления в каждой области изгиба.
Например, согласно фиг. 8, линию 33 можно определить как линию изгиба, которая соединяет точку a3, выводящую максимальное значение сопротивления в области 33 изгиба, точку b3, выводящую максимальное значение сопротивления в датчике 31-2 изгиба, точку c3, выводящую максимальное значение сопротивления в датчике 31-3 изгиба, точку d3, выводящую максимальное значение сопротивления в датчике 31-4 изгиба, и точку e3, выводящую максимальное значение сопротивления в датчике 31-5 изгиба. Фиг. 8 показывает, что одна линия изгиба формируется вертикально в центральной области отображающей поверхности.
Кроме того, согласно фиг. 9, линию 36 можно определить как линию изгиба, которая соединяет точку a1, выводящую максимальное значение сопротивления в области 34 изгиба, точку b1, выводящую максимальное значение сопротивления в датчике 31-2 изгиба, точку c1, выводящую максимальное значение сопротивления в датчике 31-3 изгиба, точку d1, выводящую максимальное значение сопротивления в датчике 31-4 изгиба и точку e1, выводящую максимальное значение сопротивления в датчике 31-5 изгиба. Кроме того, линию 37 можно определить как линию изгиба, которая соединяет точку a5, выводящую максимальное значение сопротивления в области 35 изгиба, точку b5, выводящую максимальное значение сопротивления в датчике 31-2 изгиба, точку c5, выводящую максимальное значение сопротивления в датчике 31-3 изгиба, точку d5, выводящую максимальное значение сопротивления в датчике 31-4 изгиба, и точку e5, выводящую максимальное значение сопротивления в датчике 31-5 изгиба. Таким образом, фиг. 9 показывает, что две вертикальные линии изгиба могут формироваться вблизи левой и правой границы на отображающей поверхности.
На Фиг. 10 и 11 показаны схемы, которые демонстрируют пример способа регистрации ситуации, когда гибкое устройство отображения складывается.
На Фиг. 10 показан вид в разрезе примера, когда гибкое устройство 100 отображения складывается.
Когда гибкое устройство отображения складывается, датчики изгиба, которые располагаются на одной стороне или обеих сторонах гибкого устройства отображения, складываются друг с другом и имеют значение сопротивления, соответствующее интенсивности сообщаемого натяжения.
Например, когда правая граничная область гибкого устройства 100 отображения складывается для направления натяжения к центру на фиг. 10, датчик 41-1 изгиба, расположенный на задней стороне гибкого устройства 100 отображения также складывается и выводит значения сопротивления согласно интенсивности сообщаемого натяжения.
Аналогично изгибанию, точка a3, где интенсивность натяжения, сообщаемого датчику 41-1 изгиба, максимальна, имеет максимальное значение сопротивления и меньшее значение сопротивления в направлениях обоих концов. Другими словами, датчик 41-1 изгиба имеет меньшее значение сопротивления в точках a1 и a2 или точках a4 и a5, чем значение сопротивления точки a3.
Когда складывание производится таким образом, что гибкое устройство отображения изгибается сверх определенного угла изгиба, значения сопротивления точек, соответствующих линиям изгиба, регистрируются превышающими определенное значение сопротивления. Таким образом, контроллер 120 может определять складывание или нормальное изгибание согласно значениям сопротивления.
Кроме того, когда возможно изгибание, при котором поверхности гибкого устройства 100 отображения могут контактировать друг с другом, контроллер 120 может определять складывание, на основании того, контактируют ли поверхности друг с другом. Согласно фиг. 10, когда правая граничная область гибкого устройства 100 отображения изгибается в направлении Z+ и складывается на передней стороне, смещенные области контактируют друг с другом на передней стороне гибкого устройства 100 отображения. В этом случае, прикосновение может регистрироваться на одной области отображающей поверхности, и изменения значений сопротивления увеличиваются по сравнению с нормальным изгибанием. Таким образом, контроллер 120 может вычислять расстояние от стороны границы, где производится изгибание к линии изгиба, и может определять, что складывание осуществляется, когда прикосновение регистрируется в точке на расстоянии, которое вычисляется в противоположном направлении на основании линии изгиба.
На Фиг. 11 показана схема, которая иллюстрирует способ определения области складывания согласно иллюстративному варианту осуществления. Согласно фиг. 11, поскольку, в целях объяснения, предполагается, что гибкое устройство отображения складывается горизонтально на основании передней стороны, датчики изгиба, расположенные в вертикальном направлении, не показаны для удобства объяснения.
Поскольку область складывания формируется, когда гибкое устройство отображения складывается, аналогично изгибанию, область складывания можно определить как более чем одна или две области, включающие в себя все точки на датчике изгиба, выводящие иные значения сопротивления, чем в первоначальном состоянии согласно изгибанию датчиков изгиба. Способ задания и разделения области складывания такой же, как в области изгиба, который не будет объяснен в перекрывающемся объеме.
Согласно фиг. 11, область 42 можно определить как область складывания, которая включает в себя все точки, имеющие выходные иные значения сопротивления, чем в первоначальном состоянии, т.е. точки, включающие в себя точки a1-a5 датчика 41-1 изгиба, точки b1-b5 датчика изгиба 41-2, точки c1-c5 датчика изгиба 41-3, точки d1-d5 датчика изгиба 41-4 и точки e1-e5 датчика изгиба 41-5.
Область складывания может делиться на две области на основании линии складывания. Линия складывания может указывать линию, соединяющую точки, которые выводят максимальные значения сопротивления в каждой области складывания. Линию складывания можно использовать в том же контексте что и линию изгиба.
Согласно фиг. 11, линия 43 может быть линией складывания, которая соединяет точку a3, которая выводит максимальное значение сопротивления в датчике 41-1 изгиба, точку b3, которая выводит максимальное значение сопротивления в датчике изгиба 41-2, точку c3, которая выводит максимальное значение сопротивления в датчике изгиба 41-3, точку d3, которая выводит максимальное значение сопротивления в датчике изгиба 41-4, и точку e3, которая выводит максимальное значение сопротивления в датчике изгиба 41-5.
Когда регистрируется складывание, контроллер 120 может осуществлять другие операции, чем при нормальным изгибании. Например, такие операции, как отображение экранов содержания, отличающихся друг от друга, можно осуществлять в отношении каждой области складывания.
Как описано выше, гибкое устройство 100 отображения можно скатывать наподобие листа бумаги. Контроллер 120 может определять, что скатывание осуществляется с использованием результатов, регистрируемых в датчике 110.
На Фиг. 12-14 показаны схемы, которые демонстрируют способ регистрации скатывания в гибком устройстве отображения.
Фиг. 12 демонстрирует вид в разрезе примера, когда гибкое устройство 100 отображения скатывается.
Аналогично вышесказанному, когда гибкое устройство 100 отображения скатывается, натяжение сообщается датчикам изгиба, которые располагаются на одной стороне или обеих сторонах гибкого устройства отображения.
В этом случае, интенсивность натяжения, сообщаемого датчикам изгиба, можно рассматривать как аналогичные друг с другом в определенном диапазоне, значения сопротивления, выводимые из датчиков изгиба, также можно аппроксимировать друг другу в определенном диапазоне.
Для осуществления скатывания, изгибание должно осуществляться за пределами определенной кривизны. Кроме того, когда осуществляется скатывание, область изгиба формируется увеличенной по сравнению с нормальным изгибанием или складыванием. Таким образом, контроллер 120 может определять ситуацию скатывания при регистрации, что изгибание выходит за пределы определенного степень изгиба последовательно на области, имеющей размер больше определенного.
Кроме того, в ситуации скатывания, передняя сторона и задняя сторона гибкого устройства отображения контактируют друг с другом. Например, согласно фиг. 12, когда одна граница дисплея 150 изгибается в направлении +Z и скатывается к внутренней стороне отображающей поверхности, отображающая поверхность, т.е. передняя сторона и задняя сторона, на которой располагается датчик 50-1 изгиба, контактируют друг с другом.
Таким образом, в другом иллюстративном варианте осуществления, контроллер 120 может определять ситуацию скатывания согласно тому, контактируют ли друг с другом передняя сторона и задняя сторона гибкого устройства отображения. В этом случае, датчик 110 может включать в себя датчик прикосновения. Контроллер 120 может определять, что гибкое устройство отображения скатывается, когда значения сопротивления, выводимые из датчика изгиба, аппроксимируются, и когда датчики прикосновения, которые располагаются на передней стороне и задней стороне гибкого устройства отображения, соответственно регистрируют контакты. Кроме того, контроллер 120 может определять, контактируют или приближаются ли друг к другу части области в гибком устройстве отображения, за счет искривления гибкого устройства отображения, с помощью магнитного датчика, геомагнитного датчика, оптического датчика или датчика ближнего поля вместо датчика прикосновения.
На Фиг. 13 и 14 показаны схемы, которые демонстрируют способ задания области скатывания согласно иллюстративному варианту осуществления.
'Область скатывания' указывает все области, где гибкое устройство отображения изгибается и скатывается. 'Область скатывания' можно определить как более чем одна или две области, включающие в себя все точки на датчиках изгиба, которые выводят иные значения сопротивления, чем в первоначальном состоянии, как при нормальном изгибании и складывании. Способ задания и разделения области скатывания такой же, как используемый при задании области изгиба и области складывания, которая не будет описана в перекрывающемся объеме.
Согласно фиг. 13, когда гибкое устройство 100 отображения скатывается полностью, всю область 51 гибкого устройства отображения можно определить как область скатывания. Согласно фиг. 14, когда гибкое устройство 100 отображения скатывается частично, и когда точки, которые выводят иные значения сопротивления, чем в первоначальном состоянии, находятся на предварительно определенном расстоянии, частичные области 52, 53 гибкого устройства отображения можно определить как области скатывания, отличающиеся друг от друга.
Таким образом, гибкое устройство 100 отображения может изгибаться в различных формах, и контроллер 120 может регистрировать форму изгиба на основании регистрируемых результатов датчика 110. Кроме того, контроллер может обнаруживать, насколько большое изгибание производится, на основании регистрируемых результатов, т.е. угла изгиба.
На Фиг. 15 и 16 показаны схемы, которые демонстрируют способ определения степени изгиба.
Согласно фиг. 15 и 16, гибкое устройство 100 отображения определяет степень изгиба гибкого устройства отображения с использованием изменений значений сопротивления, выводимых с интервалами из датчиков изгиба.
В частности, контроллер 120 вычисляет разность между значением сопротивления точки, которая выводит максимальное значение сопротивления, и значение сопротивления точки, которая находится на определенном расстоянии от точки, выводящей максимальное значение сопротивления.
Контроллер 120 может определять степень изгиба с использованием вычисленной разности значений сопротивления. В частности, гибкое устройство 100 отображения может делить степень изгиба на множество уровней, и согласовывать каждый уровень со значением сопротивления, имеющим определенный диапазон, и сохранять согласованные результаты.
Таким образом, гибкое устройство отображения может определять степень изгиба гибкого устройства отображения на каждом уровне из множества уровней, в которых вычисленные разности делятся согласно степени изгиба.
Например, согласно фиг. 15 и 16, степень изгиба можно обнаруживать на основании разностей значений сопротивления, выводимые из точки a5, которая выводит максимальное значение сопротивления на датчике 61 изгиба, расположенном на задней стороне гибкого устройства 100 отображения, и из точки a4, которые находятся на определенном расстоянии друг от друга.
В частности, из множества предварительно сохраненных уровней на фиг. 15 и 16, определяется уровень, которому принадлежит вычисленная разность значений сопротивления, и можно определять степень изгиба, соответствующую уровню согласования. Степень изгиба также можно выражать как угол изгиба или сила изгибания.
Поскольку степень изгиба в иллюстративном варианте осуществления, показанном на фиг. 16, больше в иллюстративном варианте осуществления, показанном на фиг. 15, разность значений сопротивления, выводимых из точки a5 и точки a4 датчика изгиба на фиг. 16, оказывается больше, чем разность значений сопротивления, выводимых из точки a5 и точки a4 датчика изгиба на фиг. 15. Таким образом, контроллер 120 может определять, что степень изгиба, показанная на фиг. 16, больше, чем на фиг. 15, когда изгибание производится, как показано на фиг. 16.
Контроллер 120 может осуществлять надлежащие операции согласно степени изгиба. Например, когда осуществляется переключение каналов и когда степень изгиба повышается, может увеличиваться скорость переключения каналов и может увеличиваться диапазон переключения каналов. Напротив, когда степень изгиба снижается, переключение каналов можно осуществлять медленнее и на меньших количествах каналов. Операции также можно осуществлять по-разному согласно степени изгиба при управлении объемом или преобразовании содержания.
Как описано выше, направление изгиба гибкого устройства 100 отображения может различаться, например, в направлении Z+ или направлении Z-.
Направление изгиба может регистрироваться различными способами. Например, направление изгиба можно определять согласно разностям изменений значений сопротивления датчиков изгиба, соответственно, путем перекрывания и размещения двух датчиков изгиба. Согласно фиг. 17-19, ниже будет описан способ регистрации направления изгиба с использованием перекрывающихся датчиков изгиба.
Для удобства объяснения, это будет объяснено согласно иллюстративному варианту осуществления нормального изгибания, показанному на фиг. 17-19. Тот же способ можно применять к складыванию и скатыванию, а также изгибанию.
Согласно фиг. 17, два датчика 71, 72 изгиба могут перекрываться и быть включены на одной стороне дисплея 150. В этом случае, когда изгибание производится в одном направлении, значения сопротивления в точке, где изгибание производится в датчике 71 изгиба и датчике 72 изгиба, обнаруживаются по-разному. Таким образом, при сравнении значений сопротивления в одной и той же точке двух датчиков 71, 72 изгиба, можно обнаруживать направление изгиба.
В частности, когда гибкое устройство 100 отображения изгибается в направлении Z+ на фиг. 18, в точке "A", соответствующей линии изгиба, более высокая интенсивность натяжения сообщается нижнему датчику 72 изгиба, а не верхнему датчику 71 изгиба.
Напротив, когда гибкое устройство 100 отображения изгибается к задней стороне на фиг. 19, более высокая интенсивность натяжения сообщается верхнему датчику 71 изгиба, а не нижнему датчику 72 изгиба.
Таким образом, контроллер 120 может обнаружить направление изгиба путем сравнения значений сопротивления в точке "A" в двух датчиках 71, 72 изгиба.
Хотя на фиг. 17-19 показано, что два датчика изгиба перекрываются друг с другом и располагаются на одной стороне дисплея 150, датчики изгиба могут располагаться на обеих сторонах дисплея 150.
Фиг. 20 показывает, что два датчика 71, 72 изгиба располагаются на обеих сторонах дисплея 150.
Таким образом, когда гибкое устройство 100 отображения изгибается в первом направлении, ортогональном экрану (в дальнейшем, направлению Z+), датчику изгиба, расположенному на первой стороне из обеих сторон дисплея 150, сообщается сила сжатия, тогда как датчику изгиба, расположенному на второй стороне, сообщается натяжение. При этом, когда гибкое устройство 100 отображения изгибается во втором направлении, противоположном первому направлению (направление Z- в нижеследующем рассмотрении), датчику изгиба, расположенному на второй стороне, сообщается сила сжатия, тогда как датчику изгиба, расположенному на первой стороне, сообщается натяжение. Соответственно, значения двух датчиков изгиба обнаруживаются по-разному согласно направлению изгиба, и контроллер 120 может делить направление изгиба согласно обнаруженным признакам значений.
Хотя на фиг. 17-20 показано, что направление изгиба обнаруживается с использованием двух датчиков изгиба, направление изгиба может делиться только с помощью тензодатчика, расположенного на одной стороне дисплея. Другими словами, поскольку тензодатчику, расположенному на одной стороне, сообщается сила сжатия или сила растяжения согласно направлению изгиба, направление изгиба можно обнаруживать, когда обнаруживаются параметры выходных значений.
Фиг. 21 демонстрирует пример конструкции, которая регистрирует изгибание за счет размещения одного датчика изгиба на одной стороне дисплея 150. Согласно фиг. 21, датчик 71 изгиба реализуется в виде замкнутой кривой, например, окружности, прямоугольника или других многоугольников, и располагается в граничной области дисплея 150. Контроллер 120 может определять точки, где изменения в выходных значениях обнаруживаются на замкнутой кривой в качестве области изгиба. Кроме того, датчики изгиба могут объединяться с дисплеем 110 в формате незамкнутой кривой, например, форме S, форме Z или другой зигзагообразной форме.
Фиг. 22 демонстрирует иллюстративный вариант осуществления, в котором два датчика изгиба скрещены и совмещены друг с другом. Согласно фиг. 22, первый датчик 71 изгиба располагается на первой стороне дисплея 150, и второй датчик 72 изгиба располагается на второй стороне дисплея 150. Первый датчик 71 изгиба располагается в первом диагональном направлении на первой стороне дисплея 150, и второй датчик 72 изгиба располагается во втором диагональном направлении на второй стороне. Согласно различным условиям изгибания, например, когда каждая краевая область изгибается, когда каждая граничная область изгибается, когда центр изгибается, и когда осуществляется складывание или скатывание, выходные значения и точки вывода в первом и втором датчиках 71, 72 изгиба становятся разными. Таким образом, контроллер 120 может определять, изгибания какого типа производятся, согласно признакам выходных значений.
Хотя различные вышеописанные иллюстративные варианты осуществления описывают, что используются датчики изгиба в форме линии, изгибание может регистрироваться с использованием множества фрагментарных тензодатчиков.
Фиг. 23-24 демонстрируют иллюстративный вариант осуществления, который регистрирует изгибание с использованием множества тензодатчиков. Тензодатчики регистрируют деформации поверхности в отношении измеренных объектов согласно изменениям значений сопротивления с использованием металла или полупроводника, сопротивление которого сильно изменяется в зависимости от интенсивности подаваемой мощности.
Обычно такие материалы, как металл, обладают тем свойством, что значения сопротивления возрастают с увеличением длины согласно внешней мощности и убывают с уменьшением длины. Таким образом, когда регистрируются изменения значений сопротивления, производится определение, что осуществляется изгибание.
Согласно фиг. 23, множество тензодатчиков располагается в граничной области дисплея 150. Количество тензодатчиков может различаться согласно размеру, форме или предварительно заданному разрешению при регистрации изгибания применительно к дисплею 150.
Хотя тензодатчики располагаются, как показано на фиг. 23, пользователь произвольно может изгибать точки в произвольном направлении. В частности, когда одна краевая область изгибается, как показано на фиг. 24, тензодатчику 80-x, перекрываемому линией изгиба, из тензодатчиков 80-1~80-n, которые располагаются горизонтально, сообщается сила. Таким образом, выходное значение соответствующего тензодатчика 80-x больше выходных значений других тензодатчиков. Кроме того, тензодатчику 80-y, перекрываемому линией изгиба, сообщается сила из тензодатчиков 80-n, 80-n+1, … , 80-m, которые располагаются вертикально, и изменяется выходное значение тензодатчика 80-y. Контроллер 120 может определять линию, соединяющую два тензодатчика 80-x, 80-y, выходные значения которых изменяются как линия изгиба.
Кроме того, в отличие от описаний, показанных на фиг. 18-24, гибкое устройство 100 отображения может регистрировать направление изгиба с использованием различных датчиков, например, гиродатчика, геомагнитного датчика и датчика ускорения.
На Фиг. 25 и 26 приведены схемы, которые демонстрируют способ регистрации направления изгиба с использованием датчика ускорения согласно иллюстративному варианту осуществления датчиков. Согласно фиг. 25 и 26, гибкое устройство 100 отображения включает в себя множество датчиков 81-1, 81-2 ускорения.
Датчики 81-1, 81-2 ускорения это датчики, которые измеряют ускорение и направление ускорения, когда происходит движение. В частности, датчики 81-1, 81-2 ускорения выводят значения регистрации, соответствующие ускорению свободного падения, которое изменяется согласно градиенту устройства, на котором смонтированы датчики. Таким образом, когда датчики 81-1, 81-2 ускорения располагаются, соответственно, на обеих граничных областях гибкого устройства отображения, выходные значения, регистрируемые в датчиках 81-1, 81-2 ускорения, соответственно изменяются, когда гибкое устройство отображения изгибается. Контроллер 120 вычисляет угол тангажа и угол крена с использованием выходных значений, регистрируемых в датчиках 81-1, 81-2 ускорения. Таким образом, направление изгиба можно определять на основании изменений в углах тангажа и углах крена, регистрируемых датчиками 81-1, 81-2 ускорения.
Хотя фиг. 25 показывает, что датчики 81-1, 81-2 ускорения располагаются на обеих границах горизонтально на основании передней стороны гибкого устройства 100 отображения, они может располагаться вертикально на фиг. 26. В этом случае, когда гибкое устройство 100 отображения изгибается в вертикальном направлении, направление изгиба может регистрироваться согласно измеренным значениям, регистрируемым в датчиках 81-3, 81-4 ускорения, расположенных вертикально.
Хотя фиг. 25 и 26 иллюстрируют, что датчики ускорения располагаются на левой и правой границах или верхней и нижней границах гибкого устройства 100 отображения, датчики ускорения могут располагаться на всех из левой, правой, верхней и нижней границ или краевых областях.
Как описано выше, для регистрации направления изгиба можно использовать гиродатчик или геомагнитный датчик, а не датчик ускорения. Гиродатчик это датчик, который обнаруживает угловую скорость путем измерения кориолисовой силы, определяемой направлением скорости, когда происходит вращательное движение. Направление изгиба может регистрироваться, поскольку направление его вращения можно обнаруживать согласно измеренным значениям гиродатчика. Геомагнитный датчик это датчик, который регистрирует азимут с использованием двухосного магнетометра или трехосного магнетометра. В случае реализации с геомагнитными датчиками, геомагнитные датчики, которые располагаются на границах гибкого устройства 100 отображения, соответственно изменяют свою позицию, когда границы изгибаются, и выводят электрические сигналы, соответствующие изменениям их геомагнетизма. Контроллер 120 может вычислять угол рыскания с использованием выходных значений из геомагнитных датчиков. Таким образом, согласно изменениям в вычисленных углах рыскания, можно определять различные параметры изгиба, например, область изгиба и направление изгиба.
В итоге, гибкое устройство 100 отображения может регистрировать изгибание с использованием различных типов датчиков. Вышеприведенные конструкции датчиков и способы регистрации можно применять к гибкому устройству 100 отображения по отдельности или совместно.
Датчик 110 может регистрировать пользовательские манипуляции, связанные с прикосновением к экрану дисплея 150, а также изгибанием.
Например, датчик 110 может включать в себя прозрачную проводящую пленку, например ITO, которая испаряется на подложке 151 в дисплее 150, и пленку, сформированную на верхнем участке прозрачной проводящей пленки. Таким образом, когда пользователь касается экрана, электрические сигналы передаются на контроллер 120 за счет контакта верхней и нижней подложек в точке прикосновения. Контроллер 120 распознает точку прикосновения с использованием координат электрода, где передаются электрические сигналы. Способы регистрации прикосновения раскрыты в различных предыдущих первоисточниках, которые не будет дополнительно описаны в этом описании изобретения.
Когда контроллер 120 регистрирует прикосновение или изгибание, различные операции управления можно осуществлять согласно прикосновению или изгибанию. Таким образом, гибкое устройство 100 отображения может регистрировать различные типы изгибания. Когда полностью используется каждое изгибание, пользователю трудно запомнить все типы изгибания. Таким образом, контроллер 120 управляет графическим процессором 130 и дисплеем 150 для перекрывания и отображения интерактивного руководства по изгибу с объектами, что позволяет пользователю интуитивно распознавать каждую форму изгиба или способ изгибания. Ниже пояснены различные примеры экранов, включающих в себя объекты, куда добавлены интерактивное руководство по изгибу.
Различные примеры, касающиеся экранов, включающих в себя интерактивное руководство по изгибу, и касающиеся интерактивного руководства по изгибу
Фиг. 27 демонстрирует пример главного экрана, на котором отображаются соответствующие пиктограммы приложения и меню. Согласно фиг. 27, главный экран 2700 делится на область отображения пиктограммы, где страницы преобразуются посредством пользовательской манипуляции, и область отображения меню, где стандартное меню устойчиво отображается в нижней части области отображения пиктограммы.
На области отображения пиктограммы отображаются объект 2710 и интерактивное руководство 2711 по изгибу, объединенное с объектом. Хотя объекты 2710 располагаются в форме матрицы 4x4 в области отображения пиктограммы, размещение объектов можно реализовать иначе в форме n x m. Например, они может располагаться в различных формах, например, 3×3, 3×4, 3×5, 4×3, 4×4, 4×5, 5×3, 5×4 и 5×5. Кроме того, хотя фиг. 27 демонстрирует пример создания экрана, когда гибкое устройство 100 отображения реализуется в виде сотового телефона, форма размещения объектов также изменяться согласно отношению экрана, когда гибкое устройство отображения реализуется в виде устройства отображения, имеющего отношение экрана, длина и ширина которого отличаются друг от друга, например, планшетного PC.
Интерактивное руководство 2711 по изгибу можно создавать в разных формах согласно параметрам изгиба, соответствующим каждому объекту. Согласно фиг. 27, добавлены ссылочные позиции на чертежах, 2710 и 2711, касающиеся объекта в левой верхней позиции и интерактивного руководства по изгибу; однако они обеспечены лишь для удобства иллюстрации. Все остальные объекты могут отображаться, будучи объединены с интерактивным руководством по изгибу.
Объекты 2710 включают в себя пиктограммы приложения для реализации соответствующих приложений, пиктограммы папок для открытия предварительно созданных папок и пиктограммы функций для реализации соответствующих функций, которые обеспечивает гибкое устройство 100 отображения. Соответственно, задаются определенные формы изгибания, относящиеся к этим пиктограммам. Интерактивное руководство по изгибу согласуется с каждым объектом согласно заданным параметрам изгиба.
Интерактивное руководство по изгибу можно выразить как руководство в виде изображения линии, которое по-разному отображается согласно позициям и формам линий изгиба, или изображений линий, которые отображаются путем добавления, по меньшей мере, одного знакового руководства и символьного руководства. Например, в отношении изгибания, которое изгибает и распрямляет левый верхний край, линия изгиба формируется диагонально в левой верхней краевой части. Таким образом, в отношении объекта, в котором задано соответствующее изгибание, руководство в виде изображений линий, выраженное в диагональной форме, добавляется в левой верхней краевой части. Когда пользователь совершает манипуляцию изгибания, которое изгибает и распрямляет верхний левый край согласно руководству, выбирается соответствующий объект и осуществляется соответствующая операция для объекта.
В области отображения меню на главном экране 2700, отображаются соответствующие часто используемые меню 2720, 2730, 2740, 2750. Интерактивные руководства 2721, 2731, 2741, 2751 по изгибу добавляются и отображаются с каждым из меню 2720, 2730, 2740, 2750.
Интерактивное руководство по изгибу может отображаться на различных экранах, отличных от главного экрана, показанного на фиг. 27. Таким образом, гибкое устройство 100 отображения может отображать экран реализации, реализуя соответствующие предварительно сохраненные приложения, и помечать интерактивное руководство по изгибу на экране реализации.
Фиг. 28 демонстрирует пример состава экрана, который отображается при реализации функции отправки сообщений согласно иллюстративному варианту осуществления.
Согласно фиг. 28, экран 2800 отправки сообщений включает в себя соответствующие области 2810, 2820, 2830 ввода для ввода знаков или символов и область 2840 кнопок выбора для ввода знаков или символов, отображаемых в областях ввода.
Области 2810, 2820 и 2830 ввода могут устанавливать области для отображения получателя, заголовка и письма.
Область 2840 кнопок выбора отображает соответствующие кнопки 2841 выбора для ввода знаков или символов. Интерактивное руководство 2842 по изгибу добавляется и отображается на каждой кнопке 2841 выбора.
Контроллер 120 отображает знаки или символы, соответствующие кнопке выбора на области ввода, когда регистрируется изгибание, соответствующее интерактивному руководству 2842 по изгибу, отображаемому на каждой кнопке 2841 выбора. Например, когда изгибание вводится согласно интерактивному руководству по изгибу, отображаемому на области 2840 кнопок выбора после выбора первой области 2810 ввода для ввода получателя, контроллер 120 отображает знаки или символы, соответствующие изгибанию на первой области 2810 ввода. Затем, когда изгибание снова вводится после выбора второй или третьей области 2820, 2830 ввода, контроллер 120 отображает знаки или символы, соответствующие изгибанию на второй или третьей области 2820, 2830 ввода.
Хотя фиг. 27 и 28 демонстрируют примеры, в которых интерактивное руководство по изгибу объединяется с каждым объектом, интерактивное руководство по изгибу может отображаться в позиции, в которой линия изгиба будет формироваться в одном экране. Например, при отображении содержание электронной книги на экране посредством реализации приложения электронной книги, интерактивное руководство по изгибу в отношении, по меньшей мере, одного из изгиба, заданного в отношении соответствующего приложения, можно добавить и отображать на экране. Другими словами, когда задано, что операция перехода от первой страницы к следующей странице осуществляется изгибанием правой границы, интерактивное руководство по изгибу в форме линии может отображаться на правой границе. Кроме того, когда задано, что операция реализации функции закладки для запоминания соответствующей страницы осуществляется изгибанием правого края, интерактивное руководство по изгибу в форме линии может отображаться на правом краю.
Кроме того, когда используется приложение клавиатуры, интерактивное руководство по изгибу может отображаться в позициях клавиш, отображаемых на экране. Кроме того, когда веб-страница отображается посредством реализации программы веб-браузера, или когда экран реализации отображается посредством реализации другого приложения, может отображаться интерактивное руководство по изгибу, соответствующее изгибу, заданному в отношении программы.
Кроме того, в каждой позиции, в которой заданы скролы или дополнительные входные объекты, может отображаться и использоваться интерактивное руководство по изгибу.
Интерактивное руководство по изгибу можно задавать уникально для каждого объекта или уникально для каждой позиции маркировки на экране. Операционная система или программная платформа гибкого устройства 100 может уникально отображать интерактивное руководство по изгибу уникально с объектом или автоматически с позицией на экране. Что касается отображения с позицией, когда объект движется, изгибание и интерактивное руководство по изгибу, соответствующее перемещенной позиции, могут отображаться с соответствующим объектом.
Кроме того, изгибание и интерактивное руководство по изгибу могут отображаться согласно запросу приложений. Другими словами, когда производитель приложений рассматривает оптимизированное изгибание для использования соответствующего приложения, информация, касающаяся изгибания, и информация, касающаяся интерактивного руководства по изгибу, которая выражает форму или способ изгибания, может быть включено в управляющую информацию приложения. Операционная система или программная платформа гибкого устройства 100 задает изгибание и интерактивное руководство по изгибу в отношении соответствующей пиктограммы приложения с использованием информации изгибания и информации интерактивного руководства по изгибу, которые хранятся в управляющей информации приложения. По меньшей мере, одну из таких информации изгибания и информации интерактивного руководства по изгибу можно задавать в стандартном формате. Другими словами, стандарт можно устанавливать в отношении того, в какой области приложения можно устанавливать информацию изгибания и интерактивного руководства по изгибу, или сколько байтов кодов могу выражать такую информацию. Таким образом, производитель приложений может изготавливать изгибание и интерактивное руководство по изгибу уникально, на основании признаков, которые производитель хочет реализовать в гибком устройстве.
Таким образом, в гибком устройстве 100 могут обеспечиваться новые форматы изгибания и новые интерактивные руководства по изгибу, а также базовое изгибание и его руководство.
Кроме того, пользователь может отображать другое изгибание в отношении конкретного объекта. Например, при нажатии заданной кнопки, то, что отображается, может включать в себя экран UI (пользовательского интерфейса), где пользователь может выбирать тип изгибания, которое может регистрироваться, и объекты могут отображаться с изгибанием в гибком устройстве 100. Пользователь может отображать изгибание с объектом посредством экрана UI.
При отображении изгибания с объектом, может потребоваться упорядочение по приоритету. Когда гибкое устройство 100 сконструирован для задания изгибания для каждой позиции, и когда изгибание, запрашиваемое пользователем или приложением, отличается от изгибания в позиции, где отображается соответствующий объект, предыдущее изгибание можно отображать с соответствующим объектом, сравнивая упорядочение по приоритету между двумя изгибаниями. Упорядочение по приоритету можно задавать таким образом, чтобы изгибание, запрашиваемое пользователем имело первое упорядочение по приоритету, a изгибание, запрашиваемое приложением, имело следующее упорядочение по приоритету, и изгиб, заданный относительно позиции, имел последнее упорядочение по приоритету. Такое упорядочение по приоритету можно задавать по-разному.
Фиг. 29 демонстрирует иллюстративный вариант осуществления отображения интерактивного руководства по изгибу уникально заданный относительно позиции маркировки на экране.
Согласно фиг. 29, гибкое устройство 100 отображения отображает главные экраны 2910, 2920, которые делятся на множество страниц. Пользователь может преобразовывать главные экраны 2910, 2920 способами легкого маха по экрану в одном направлении путем прикосновения к экрану или изгибания гибкого устройства 100 отображения.
На каждой странице главных экранов, могут отображаться соответствующие пиктограммы, которые размещает пользователь. Согласно фиг. 29, пиктограммы с 1 по 8 (2911) отображаются на экране 2910 первой страницы, и пиктограммы с 9 по 12 отображаются на экране 2920 второй страницы.
Когда осуществляется преобразование страницы, контроллер 120 однородно задает изгибание относительно каждой позиции маркировки, где каждый объект отображается в новые объекты согласно позиции маркировки, где каждый новый объект отображается после преобразования. Другими словами, первое изгибание, соответствующее пиктограмме 1 экрана 2910 первой страницы однородно устанавливается на пиктограмму 9 экрана 2920 второй страницы. Когда первое изгибание регистрируется при отображении экрана 2910 первой страницы, контроллер 120 осуществляет операции, соответствующие пиктограмме 1. При этом, когда первое изгибание регистрируется при отображении экрана 2920 второй страницы, контроллер 120 осуществляет операцию, соответствующую пиктограмме 9. Изгибание, соответствующее пиктограммам с 2 по 4, однородно устанавливается на пиктограммы с 10 по 12. Фиг. 29 демонстрирует четыре пиктограммы на экране 2920 второй страницы; однако, когда отображаются восемь пиктограмм, изгибание, соответствующее пиктограммам с 5 по 8, можно использовать для пиктограмм экрана 2920 второй страницы.
Когда изгибание вновь задается в отношении новых объектов, отображаемых на экране после преобразования, контроллер 120 может добавлять и отображать интерактивное руководство 2912 по изгибу, касающееся изгибания, вновь установленного на новые объекты. Согласно фиг. 29, интерактивное руководство по изгибу, добавленное к пиктограммам с 1 по 4, добавляется однородно к пиктограммам с 9 по 12. В результате, интерактивное руководство 2912 по изгибу могут отображаться в том же шаблоне, что и предыдущая страница согласно позиции маркировки объектов на экране, когда осуществляется преобразование экрана.
Фиг. 30 демонстрирует экран гибкого устройства 100 отображения согласно иллюстративному варианту осуществления, в котором интерактивное руководство по изгибу уникально задается в отношении каждого объекта. Для удобства объяснения, состав экрана, количество объектов, отображаемые на экране, и позиция маркировки объекта проиллюстрированы так же, как на фиг. 29.
Согласно фиг. 30, когда экран 2920 второй страницы отображается при отображении экрана 2910 первой страницы, новое интерактивное руководство по изгибу, отличное от интерактивного руководства по изгибу, отображаемого на экране 2910 первой страницы, отображается на экране 2920 второй страницы. Интерактивное руководство по изгибу может визуально выражать изгибание, уникально заданное в отношении каждого объекта.
Хотя это не показано на фиг. 30, при преобразовании в экран третьей страницы, можно задавать первоначальное изгибание в отношении пиктограмм, вновь отображаемых на экране третьей страницы, и может отображаться соответствующее интерактивное руководство по изгибу.
Хотя фиг. 27-30 демонстрируют различные интерактивные руководства по изгибу, выраженные в форме линии, знаковое руководство или символьное руководство можно добавлять к интерактивному руководству по изгибу, и руководство можно выражать в различных формах, как описано выше. Ниже, в частности, объяснены типы интерактивного руководства по изгибу и соответствующее изгибание.
Кроме того, хотя вышеописанные чертежи иллюстрируют, что интерактивное руководство по изгибу добавляется к каждому объекту на экране, можно выборочно определять, отображать ли интерактивное руководство по изгибу. Например, пользователь может задавать, использовать ли интерактивное руководство по изгибу через установленное меню. Когда функция для отображения интерактивного руководства по изгибу включена, различные интерактивные руководства по изгибу обеспечиваются вышеописанным образом. При этом, когда функция для отображения интерактивного руководства по изгибу отключена, отображаются объекты без интерактивного руководства по изгибу.
Кроме того, использовать ли интерактивное руководство по изгибу можно задавать в отношении каждого объекта. Например, согласно фиг. 30, это можно задавать так, что интерактивные руководства по изгибу отображаются для объектов 1 и 2, и интерактивные руководства по изгибу не отображаются для объектов с 3 по 12. В этом случае, согласно заданной ситуации, интерактивное руководство по изгибу отображается или не отображается для каждого объекта.
Кроме того, использовать ли интерактивное руководство по изгибу, можно задавать в отношении каждой страницы. Например, согласно фиг. 30, это можно задавать так, что интерактивные руководства по изгибу отображаются для первой страницы 2910 и не отображается для второй страницы 2920. Таким образом, объекты с 9 по 12 могут отображаться без добавления интерактивных руководств по изгибу на второй странице 2920.
Кроме того, использовать ли интерактивное руководство по изгибу, задается в отношении каждого приложения. Это можно задавать так, что интерактивные руководства по изгибу отображаются на главном экране, описанном на фиг. 27 и не отображаются на экране реализации приложения, показанном на фиг. 28. В этом случае, даже когда почтовое приложение реализуется в виде, показанном на фиг. 28, и когда отображается экран, показанный на фиг. 28, интерактивные руководства по изгибу не отображаются.
Кроме того, отображать ли интерактивное руководство по изгибу можно определять выборочно согласно различным стандартам.
Интерактивное руководство по изгибу может включать в себя руководство в виде изображения линии, которое представляет собой, по меньшей мере, одно из ширины линии, количества линий, формы линии, направления линии, позиции линии, угла линии, цвета линии, размера линии и длины линии, регулируются.
Фиг. 31 демонстрирует интерактивные изображения (a)-(l) изгиба, соответствующие изгибанию, которое искривляет гибкое устройство отображения в первом направлении. Первое направление указывает направление, в котором пользователь изгибает дисплей на основании поверхности гибкого устройства отображения.
Когда гибкое устройство отображения имеет квадратную форму, изгибание может включать в себя изгибание и выпрямление, которое изгибает и распрямляет верхнюю левую, верхнюю правую, нижнюю левую, нижнюю правую, левую границу, верхнюю границу, правую границу и нижнюю границу, горизонтальное складывание, которое складывает центр в левом или правом направлении, вертикальное складывание, которое складывает центр в верхнем или нижнем направлении, и изгибание и удержание, которое складывает и поддерживает края или границы.
Таким образом, то, что отображается, может включать в себя: интерактивное руководство (a) по изгибу, в котором линия помечена на верхнем левом краю, интерактивное руководство (b) по изгибу, в котором линия помечена на верхнем правом краю, интерактивное руководство (c) по изгибу, в котором линия помечена на нижнем левом краю, и интерактивное руководство (d) по изгибу, в котором линия помечена на нижнем правом краю. Кроме того, то, что отображается, может включать в себя интерактивное руководство (e) по изгибу, в котором линия помечена на левой границе, интерактивное руководство (f) по изгибу, в котором линия помечена на верхней границе, интерактивное руководство (g) по изгибу, в котором линия помечена на правой границе, и интерактивное руководство (h) по изгибу, в котором линия помечена на нижней границе. Кроме того, может отображаться интерактивное руководство (i) по изгибу для маркировки вертикальной линии, которая отображает линию изгиба, когда осуществляется горизонтальное складывание, и интерактивное руководство (j) по изгибу для маркировки горизонтальной линии, которая отображает линию изгиба, когда осуществляется вертикальное складывание. Такие интерактивные руководства (a) - (c) по изгибу могут отображаться сплошной линией.
Изгибание и удержание можно выразить в виде толстой сплошной линии. Согласно фиг. 31, то, что отображается, может включать в себя интерактивное руководство (k) по изгибу, которое указывает изгибание и удержание, сохраняющее верхний левый край после изгибания, и интерактивное руководство (l) по изгибу, которое указывает изгибание и удержание, сохраняющее правую границу после изгибания. Хотя фиг. 31 демонстрирует интерактивные руководства (k), (l) по изгибу, касающиеся изгибания и удержания на верхнем левом краю и правой границе, интерактивные руководства (k), (l) по изгибу, соответствующие другим движениям, могут отображаться, когда изгибание и удержание задано относительно других областей. Таким образом, другие интерактивные руководства (a)-(c) по изгибу, показанные на фиг. 31, можно выразить толстой сплошной линией.
Хотя фиг. 31 описывает интерактивное руководство по изгибу, когда изгибание производится в первом направлении, интерактивное руководство по изгибу может отображаться, когда изгибание производится во втором направлении.
Фиг. 32 демонстрирует интерактивные руководства по изгибу, когда изгибание производится во втором направлении. Согласно фиг. 32, интерактивные руководства по изгибу выражаются пунктирной линией, когда изгибание производится во втором направлении. Интерактивные руководства (a)-(l) по изгибу, показанные на фиг. 32, выражаются, когда изгибание, показанное на фиг. 31, осуществляется противоположно первому направлению, т.е. в направлении назад.
Согласно фиг. 31 и 32, интерактивные руководства по изгибу можно выразить, задавая линии в виде сплошной линии или пунктирной линии согласно направлениям изгибания. Кроме того, интерактивные руководства по изгибу можно выразить в виде тонкой сплошной линии или толстой сплошной линии в соответствии с тем, является ли оно изгибанием и выпрямлением или изгибанием и удержанием. В отличие от пунктирной линии, также могут использоваться различные линии, например, одноточечная цепная линия и двухточечная цепная линия.
Хотя линии отличаются в соответствии с тем, имеют ли они первое направление или второе направление на фиг. 31 и 32, направление изгиба можно выразить с использованием знакового руководства или символьного руководства.
Фиг. 33 демонстрирует интерактивное руководство (a) по изгибу, причем знаковое руководство U добавляется для выражения изгибания в первом направлении, интерактивное руководство (b) по изгибу, причем знаковое руководство D добавляется для выражения изгибания во втором направлении, интерактивное руководство (c) по изгибу, причем символьное руководство + добавляется для выражения изгибания в первом направлении, и интерактивное руководство (d) по изгибу, причем символьное руководство - добавляется для выражения изгибания во втором направлении.
В итоге, позиция изгибания, форма изгиба и направление изгиба могут интуитивно сообщаться с использованием позиции линии, параметров линии, глубины линии, знакового руководства и символьного руководства.
Когда множество операций изгиба осуществляется в однородной форме на однородной области, множество операций изгиба можно задавать так, чтобы работать иначе, чем в случае одного изгибания. В этом случае, может потребоваться интерактивное руководство по изгибу для выражения количества изгибаний.
Фиг. 34 демонстрирует различные примеры интерактивных руководств по изгибу, которые выражают количество изгибаний. Согласно фиг. 34, количество изгибаний можно выразить количеством точек (a, b), добавленных на линии, количествами (c, d), и количеством линий (e, f). Например, интерактивное руководство (a) по изгибу, имеющее две точки, интерактивное руководство (c) по изгибу, имеющее количество 2, и интерактивное руководство (e) по изгибу, выраженное двумя линиями, указывают, что изгибание следует осуществлять дважды. Интерактивное руководство (b) по изгибу, имеющее три точки, интерактивное руководство (d) по изгибу, имеющее количество 3, и интерактивное руководство (e) по изгибу, выраженное тремя линиями, указывают, что изгибание следует осуществлять три раза. Хотя количество выражается вокруг линии на фиг. 34, оно может перекрываться и отображаться на линии.
Дополнительно, различные операции управления можно задавать согласно углу изгиба или степени изгиба. Например, когда производится изгибание на 30° при реализации приложения электронной книги и отображения содержания электронной книги, можно осуществлять первую операцию управления для перехода от первой страницы ко второй странице на постраничной основе. Когда производится изгибание на 60°, можно осуществлять вторую операцию управления для перелистывания сразу нескольких страниц. Таким образом, необходимо сообщать угол изгиба или степень изгиба посредством интерактивного руководства по изгибу.
Фиг. 35 демонстрирует различные примеры интерактивных руководств по изгибу, которые выражают угол изгиба или степень изгиба. Согласно фиг. 35, то, что отображается, может включать в себя интерактивные руководства (a), (b) по изгибу, которые выражают угол изгиба числом, и интерактивные руководства (c), (d) по изгибу, которые выражают угол изгиба графическим символом. На фиг. 35, руководство в виде изображения линии указывает позицию изгибания, и число или символ указывает угол изгиба или степень изгиба. Число и символ, показанные на фиг. 35, также могут перекрываться и отображаться на линии.
Дополнительно, различные операции управления можно задавать согласно времени удержания изгиба. Например, в случае, когда реализуется приложение электронной книги, и содержание электронной книги отображаются, когда изгибание производится за одну секунду, первую операцию управления можно осуществлять для перехода от первой страница к следующей на постраничной основе. когда изгибание производится за три секунды, вторую операцию управления можно осуществлять для перелистывания сразу нескольких страниц. Таким образом, время удержания изгиба можно сообщать посредством интерактивного руководства по изгибу.
Фиг. 36 демонстрирует примеры интерактивных руководств по изгибу, которые выражают время удержания изгиба. Согласно фиг. 36, интерактивные руководства (a), (b) по изгибу выражают руководства в виде изображений линий, которые указывают позицию изгибания знаками 1s и 3s, которые указывают времена удержания изгиба 1 секунда и 3 секунды. Пользователь может интуитивно распознавать способы изгибания, наблюдая интерактивные руководства (a), (b) по изгибу, показанные на фиг. 36.
Дополнительно, когда обеспечены функции, согласованные с множественным изгибанием, которое изгибает разные области несколько раз, интерактивное руководство по изгибу, которое выражает порядок изгибания, может отображаться таким образом, чтобы пользователь мог распознавать порядок изгибания.
Фиг. 37 демонстрирует различные примеры интерактивного руководства по изгибу, в которых соответствующие числа добавляются для выражения порядка изгибания. Согласно фиг. 37, когда первое изгибание производится во втором направлении, и когда второе изгибание производится в первом направлении, то, что отображается, может включать в себя интерактивное руководство по изгибу (a) в котором число 1 выражается пунктирной линией, и число 2 выражается сплошной линией. Кроме того, интерактивные руководства (b), (c), (d) по изгибу могут отображаться, объединяться с множеством руководств в виде изображений линий, указывающих направление изгиба и область изгиба, и число, указывающее порядок изгибания.
Кроме того, как описано выше, можно использовать особую форму изгибания, например, скатывание, качание или встряхивание. В этом случае, различные интерактивные руководства по изгибу могут обеспечиваться для выражения каждого изгибания.
Фиг. 38 демонстрирует различные примеры интерактивных руководств по изгибу для выражения особого изгибания. Согласно фиг. 38, в отношении кручения, которое скручивает гибкое устройство 100 отображения, то, что отображается, может включать в себя интерактивные руководства (a), (b) по изгибу, которые выражаются сплошной линией и пунктирной линией, скрещенных друг с другом согласно признакам кручения.
Кроме того, для выражения скатывания, то, что отображается, может включать в себя интерактивные руководства (c), (d) по изгибу, которые включают в себя руководства в виде изображений линий, указывающие начальную позицию скатывания и изображения стрелки, указывающие движение скатывания.
Выше описано, что форма или способ изгибания выражается различными способами, которые комбинируют руководства в виде изображений линий, знаковые руководства и символьные руководства. Однако интерактивные руководства по изгибу могут отображаться только с текстами, исключая при этом руководства в виде изображений линий.
Различные вышеописанные иллюстративные варианты осуществления описывают соответствующие экраны на основании случаев, когда гибкое устройство реализуется как гибкое устройство отображения, включающее в себя дисплей. Однако гибкое устройство можно реализовать как устройство, которое подключено к внешнему устройству отображения, и управляет его операциями.
Фиг. 39 демонстрирует состав гибкого устройства, которое взаимодействует с внешним устройством отображения согласно другому примерному варианту осуществления.
Согласно фиг. 39, гибкое устройство 100 может устанавливать проводное или беспроводное соединение с устройством 200 отображения. Гибкое устройство 100 изготовлено из гибкого материала и может произвольно изгибаться пользователем, в то время как устройство 200 отображения можно реализовать как общее устройство отображения, которое не является гибким. В частности, можно реализовать различные типы устройств отображения, например, телевизор (TV), электронную рамку, монитор или рекламную панель.
Устройство 200 отображения отображает экран, включающий в себя соответствующие объекты, объединенные с интерактивными руководствами по изгибу.
Согласно иллюстративному варианту осуществления, экран, включающий в себя объекты, объединенные с интерактивными руководствами по изгибу, может создаваться и отображаться устройством 200 отображения.
Устройство 200 отображения заранее сохраняет информацию изгибания, согласованную с каждой операцией управления и интерактивными руководствами по изгибу. Информацию изгибания можно именовать информацией формы изгиба или информацией способа изгибания. Таким образом, когда устройство 200 отображения включено и отображает главный экран, или реализует соответствующие приложения или функции и отображает экран реализации, интерактивные руководства по изгибу, касающиеся объектов, отображаются, когда существуют объекты, согласованные с изгибанием.
Когда сигналы управления, соответствующие изгибанию, принимаются от гибкого устройства, которое может изгибаться, устройство 200 отображения осуществляет операции управления согласно сигналам управления. Сигналы управления можно реализовать как инфракрасные (IR) сигналы или сигналы связи, которые передаются через различные интерфейсы, например, Bluetooth, NFC, WiFi, Zigbee или последовательный интерфейс.
Кроме того, 'интерактивное руководство по изгибу' указывает руководства в виде изображений, которые визуально выражают форму изгиба или способ изгибания, заданный в отношении каждого объекта, как описано выше. Типы и формы интерактивного руководства по изгибу и операции управления, соответствующие изгибанию, описаны со ссылкой на различные вышеописанные иллюстративные варианты осуществления, которые не будут дополнительно объяснены. Когда устройство 200 отображения самостоятельно создает и отображает интерактивное руководство по изгибу согласно иллюстративным вариантам осуществления, гибкое устройство 100 может действовать как простой пульт дистанционного управления. Гибкое устройство 100 может исключать дисплей 150 и графический процессор 130, включает в себя датчик 110, контроллер 120 и хранилище 140 и дополнительно включает в себя отдельный передатчик сигналов пульта дистанционного управления (не показан). В хранилище 140 могут храниться соответствующие команды, соответствующие изгибанию. Когда изгибание регистрируется датчиком 110, контроллер 120 может обнаруживать команды, соответствующие регистрируемому изгибанию, из хранилища 140, генерировать сигналы управления, соответствующие командам, т.е. сигналам пульта дистанционного управления и передавать сигналы на устройство 200 отображения посредством передатчика сигналов пульта дистанционного управления. Команды, хранящиеся в хранилище 140 могут предварительно выделяться и сохраняться для каждого изгибания, которое поддерживает устройство 200 отображения.
Согласно другому примерному варианту осуществления, гибкое устройство 100 может передавать информацию, касающуюся интерактивного руководства по изгибу, на устройство 200 отображения, или передавать данные, касающиеся экранов, которые включают в себя объекты, объединенные с интерактивным руководством по изгибу, на устройство 200 отображения, что позволяет ему отображать экраны. Другими словами, устройство 200 отображения может отображать объекты, объединенные с интерактивным руководством по изгибу на основании соответствующей информации, поступающей от гибкого устройства 100. Когда сигналы управления, соответствующие изгибанию, принимаются во время отображения объектов, устройство 200 отображения осуществляет операции, соответствующие сигналам управления.
На Фиг. 40 показана блок-схема состава гибкого устройства 100 согласно иллюстративному варианту осуществления, которое отображает интерактивное руководство по изгибу с использованием внешнего устройства отображения.
Согласно фиг. 40, гибкое устройство 100 включает в себя датчик 110, контроллер 120, хранилище 140 и интерфейс 160.
Датчик 110 и хранилище 140 такие же, как описаны выше со ссылкой на фиг. 1 и 2, и не будет дополнительно объяснены.
Интерфейс 160 соединен с устройством 200 отображения. Интерфейс 160 может соединяться с устройством 200 отображения различными способами проводной или беспроводной связи, например, интерфейс USB, WiFi, Zigbee, IEEE и Bluetooth.
Контроллер 120 может передавать информацию, касающуюся объектов, и интерактивное руководство по изгибу, объединенное с объектами, на устройство 200 отображения, что позволяет устройству 200 отображения отображать экран, включающий в себя объекты и интерактивное руководство по изгибу.
Кроме того, когда изгибание регистрируется датчиком 110, контроллер 120 может передавать сигналы управления, указывающие операции управления, соответствующие регистрируемому изгибанию на устройство 200 отображения. Таким образом, пользователь может управлять операциями внешнего устройства 200 отображения, путем изгибания гибкого устройства 100.
Когда графический процессор дополнительно добавлен в иллюстративном варианте осуществления, показанном на фиг. 40, контроллер 120 может визуализировать сам экран, который включает в себя объекты и интерактивное руководство по изгибу, и передавать данные визуализация на устройство 200 отображения.
На фиг. 41 показана блок-схема операций, поясняющая способ управления гибкого устройства согласно различным иллюстративным вариантам осуществления. Согласно фиг. 41, гибкое устройство обеспечивает экран, включающий в себя объекты, объединенные с интерактивным руководством по изгибу в отношении изгиба в операции S4110. Интерактивное руководство по изгибу может представлять собой руководство, которое уникально задается в отношении каждого объекта или для каждой позиции маркировки на экране. Интерактивное руководство по изгибу, в частности, проиллюстрировано в вышеприведенном рассмотрении, которое не будет дополнительно объяснено.
Когда гибкое устройство соединено с внешним устройством отображения, не включая в себя внутренний дисплей, гибкое устройство может передавать информацию, касающуюся объектов, и интерактивное руководство по изгибу, объединенное с объектами, на устройство отображения, которое подключено к гибкому устройству, и отображать экран посредством устройства отображения.
Кроме того, когда гибкое устройство включает в себя дисплей, гибкое устройство может создавать экран, включающий в себя, по меньшей мере, один объект, соответственно объединенный с интерактивным руководством по изгибу, и отображать экран посредством дисплея.
Пользователь может вводить различные операции изгиба, наблюдая интерактивное руководство по изгибу. Гибкое устройство может регистрировать изгибание различными способами, как описано выше в операции S4120.
Когда регистрируется изгиб, заданный относительно объекта, отображаемого на экране, гибкое устройство осуществляет операции, соответствующие объекту в операции S4130. Когда гибкое устройство подключено к внешнему устройству отображения, сигналы управления, соответствующие изгибанию могут передаваться на устройство отображения. Когда гибкое устройство отображения включает в себя дисплей, можно реализовать различные операции согласно изгибанию.
Соответственно, когда изгибание производится, можно реализовать приложение, соответствующее объекту, соответствующему изгибанию. В частности, когда осуществляется изгибание, соответствующее пиктограмме игры, можно реализовать соответствующее игровое приложение, и когда осуществляется изгибание, соответствующее пиктограмме телефона, может отображаться экран телефонного соединения, включающий в себя несколько панелей. Дополнительно, когда осуществляется изгибание, соответствующее меню контактов, на экране отображается предварительно сохраненный список контактов. Соответственно, когда осуществляется изгибание, согласующееся с объектом, реализуется программа, соответствующая объекту.
Когда осуществляется изгиб, заданный для базовых функций, которые не выражаются объектами, базовые функции можно реализовать согласно изгибанию. Например, различные операции управления, например, включение, отключение, преобразование каналов, регулировку объема, регулировку размера, преобразование страницы, преобразование содержания, реализацию приложения, окончание реализации, переход к фоновому экрану, отображение виджета, удаление отображения виджета, начало воспроизведения содержания, окончание воспроизведения, паузу, перемотку назад и ускоренную перемотку вперед, могут запускаться изгибанием.
Хотя это не описано на фиг. 41, гибкое устройство может задавать однородное изгибание для позиции маркировки каждого объекта на экране до преобразования в новые объекты, отображаемые на экране после преобразования согласно позиции маркировки, когда осуществляется преобразование экрана. Таким образом, интерактивное руководство по изгибу в отношении изгиба, заданного для новых объектов, может объединяться с новыми объектами и отображаться.
Как описано выше, гибкое устройство можно реализовать как различные типы устройств. Например, гибкое устройство можно реализовать как различные типы устройств, например, сотового телефона, PDA, пульта дистанционного управления, планшетного PC, электронного блокнота и ноутбука. В этом случае, могут дополнительно включаться дополнительные блоки, отличные от вышеупомянутых блоков.
На Фиг. 42 показана блок-схема, демонстрирующая подробный состав гибкого устройства, которое можно реализовать как сотовый телефон. Согласно фиг. 42, гибкое устройство включает в себя датчик 110, контроллер 120, графический процессор 130, хранилище 140, дисплей 150, блок 160 связи, приемник 165 глобальной системы позиционирования (GPS), приемник 166 цифрового мультимедийного вещания (DMB), аудиопроцессор 170, видеопроцессор 175, источник 180 электропитания, громкоговоритель 185, кнопку 191, порт 192 USB, камеру 193 и микрофон 194.
Датчик 110 включает в себя геомагнитный датчик 111, гиродатчик 112, датчик 113 ускорения, датчик 114 прикосновения, датчик 115 изгиба, датчик 116 давления, датчик 117 ближнего поля и датчик 118 хвата. Датчик 110 может регистрировать различные манипуляции, например, прикосновение, вращение, скольжение, давление и приближение в отношении гибкого устройства, отличные от вышеописанного изгибания.
Геомагнитный датчик 111 представляет собой датчик, который регистрирует ситуации вращения и направление движения гибкого устройства 100. Гиродатчик 112 представляет собой датчик, который регистрирует угол поворота гибкого устройства 100. Могут быть включены и геомагнитный датчик 111, и гиродатчик 112; однако, когда включен один из них, гибкое устройство 100 может регистрировать ситуацию вращения.
Датчик 113 ускорения представляет собой датчик, который регистрирует степень скольжения гибкого устройства 100. Кроме того, датчик 113 ускорения можно использовать для обнаружения параметров изгиба, например, направления изгиба или области изгиба гибкого устройства 100.
Датчик 114 прикосновения может быть емкостным или декомпрессивным. Емкостной способ предусматривает использование проводящего слоя, нанесенного на поверхность дисплея 150 и вычисление координат прикосновения путем регистрации микроэлектрических токов, возбуждаемых телом пользователя, когда часть тела пользователя касается поверхности дисплея 150. Декомпрессивный способ предусматривает наличие двух электродных подложек и вычисление координат прикосновения путем регистрации протекания электрических токов, вызванных контактированием верхней и нижней подложек точки прикосновения, когда пользователь касается экрана. Датчик 114 прикосновения можно реализовать как различные формы.
Датчик 115 изгиба реализуется в различных формах и количествах, как описано выше, и регистрирует ситуации изгиба гибкого устройства 100. Различные иллюстративные варианты осуществления, касающиеся состава и операций датчика 115 изгиба, описаны выше, и не будут дополнительно объяснены.
Датчик 116 давления регистрирует силу давления, оказываемого на гибкое устройство 100, когда пользователь касается или совершает манипуляцию изгибания, и выдает регистрируемое давление на контроллер 120. Датчик 116 давления может быть смонтирован в дисплее 150 и может включать в себя пьезоэлектрическую пленку, которая выводит электрические сигналы, соответствующие силе давления. Фиг. 42 показывает, что датчик 114 прикосновения и датчик 116 давления располагаются отдельно. Однако, когда датчик 114 прикосновения реализуется в виде декомпрессивного датчика прикосновения, декомпрессивный датчик прикосновения также может играть роль датчика 116 давления.
Датчик 117 ближнего поля представляет собой датчик, который регистрирует движение приближения без контакта с поверхностью дисплея. Датчик 117 ближнего поля формирует высокочастотное магнитное поле и может быть реализован как различные типы датчиков, например, высокочастотный удалительный тип, который регистрирует электрические токи, индуцируемые признаками магнитного поля, изменяющимися с приближением объекта, магнитный тип, который использует магниты, и емкостной зарядный тип, который регистрирует емкостные заряды, изменяющиеся с приближением объекта.
Датчик 118 хвата может располагаться на границе или в части ручного хвата гибкого устройства 100 отдельно от датчика 116 давления, и регистрировать хват пользователя. Датчик 118 хвата можно реализовать как датчик давления или датчик прикосновения.
Контроллер 120 определяет намерение пользователя, анализируя соответствующие регистрационные сигналы, регистрируемые в датчике 110, и осуществляет операции, соответствующие определенному намерению. Контроллер 120 может осуществлять операции управления согласно различным способам ввода, например, тактильной манипуляции, ввода движения, голосового ввода и кнопочного ввода, отличного от изгибания. Для тактильной манипуляции, существуют различные манипуляции, например, простое прикосновение, тычок, прикосновение и удержание, перемещение, легкий мах, перетаскивание и отпускание, сужающий жест и расширяющий жест.
Например, контроллер 120 может реализовывать приложение, хранящееся в хранилище 140, генерировать и отображать экран реализации или воспроизводить соответствующее содержание, хранящееся в хранилище 140. Кроме того, контроллер 120 может осуществлять связь с внешними устройствами через блок 160 связи.
Блок 160 связи осуществляет связь с различными типами внешних устройств согласно различным типам способов осуществления связи. Блок 160 связи включает в себя микросхему 161 WiFi, микросхему 162 Bluetooth, микросхема 163 ближней бесконтактной связи (NFC) и микросхему 164 беспроводной связи.
Микросхема 161 WiFi, микросхема 162 Bluetooth и микросхема 163 NFC осуществляют связь согласно способам WiFi, способам Bluetooth и способам NFC, соответственно. Микросхема 163 NFC представляет собой микросхему, действующую согласно способу NFC, который использует полосу 13,56 МГц из различных частотных полос RF-ID, например, 135 кГц, 13,56 МГц, 433 МГц, 860-960 МГц и 2,45 ГГц. Когда используется микросхема 111 WiFi или микросхема 112 Bluetooth, соответствующая информация соединения, например, SSID и ключ сеанса, может сначала передаваться и приниматься, связь осуществляется с использованием информации, и соответствующая информация передается и принимается. Микросхема 164 беспроводной связи представляет собой микросхему, которая осуществляет связь согласно различным протоколам связи, например, IEEE, Zigbee, 3-е поколение (3G), проект партнерства третьего поколения (3GPP) и проект долгосрочного развития систем связи (LTE).
Приемник 165 GPS принимает сигналы GPS от спутников GPS, и вычисляет текущую позицию гибкого устройства 100.
Приемник 166 DMB принимает и обрабатывает сигналы DMB.
Графический процессор 130 генерирует интерактивное руководство по изгибу, объединенное с объектами с использованием калькулятора (не показан) и блока визуализации (не показан). Калькулятор вычисляет значения признаков, например, значения координат, форму, размер и цвет, касающиеся интерактивного руководства по изгибу, подлежащие отображению. Блок визуализации создает графические объекты на основании значений признаков, вычисленных в калькуляторе. Интерактивное руководство по изгибу, созданное на блоке визуализации, объединяется с соответствующими пиктограммами и отображается на экране, который отображает дисплей 150. Интерактивное руководство по изгибу можно создавать с помощью состава, который включает в себя руководства в виде изображений линий, различающиеся шириной линий, количеством линий, формой линий, направлением линий, позицией линий, углом линий, цветом линий, размером линий и длиной линий, и различные другие знаковые или символьные руководства, пригодные для параметров изгиба.
Источник 180 электропитания подает электрическую мощность на каждый блок гибкого устройства 100. Источник 180 электропитания можно реализовать в виде конструкции, которая включает в себя токоприемник положительной полярности, электрод положительной полярности, электролит, электрод отрицательной полярности, токоприемник отрицательной полярности и участок обкладки, который покрывает вышеперечисленные блоки. Источник 180 электропитания реализуется в виде аккумуляторной батареи, который может заряжаться и разряжаться. Источник 180 электропитания можно реализовать как гибкий тип источника питания, чтобы он мог изгибаться вместе с гибким устройством 100. Токоприемники, электроды и электролиты могут состоять из материала, имеющего гибкие свойства. Конкретный состав и материал источника 180 электропитания будут отдельно описаны ниже.
Аудиопроцессор 170 осуществляет обработку аудиоданных. Различные виды обработки, например, декодирование, усиление и фильтрация шума, в отношении аудиоданных могут осуществляться аудиопроцессором 170.
Видеопроцессор 175 осуществляет обработку видеоданных. Различные виды обработки изображений, например, декодирование, масштабирование, фильтрация шума, преобразование частоты кадров, и преобразование разрешения могут осуществляться видеопроцессором 175.
Дисплей 150 отображает различные экраны и объекты, например, видеоданные, обработанные на видеопроцессоре 175, и интерактивное руководство по изгибу, сгенерированное на графическом процессоре 130. Конструкция дисплея 150 конкретно описана выше и не будет дополнительно объяснена.
Громкоговоритель 185 выводит соответствующие предупреждающие звуковые сигналы или голосовые сообщения, а также аудиоданные, обработанные на аудиопроцессоре 170.
Кнопка 191 может относиться к различным типам кнопок, например, может представлять собой механическую кнопку, смонтированную в произвольной области передней стороны, боковой стороны и задней стороны во внешнем основном корпусе гибкого устройства 100, сенсорную панель и колесико.
Порт 192 USB может осуществлять связь с соответствующими внешними устройствами, включающими в себя устройство 200 отображения через кабели USB.
Камера 193 фотографирует неподвижные изображения или видеоизображения под управлением пользователя. Камеру 193 можно реализовать в множественных формах, например, как камеру передней стороны и камеру задней стороны.
Микрофон 194 принимает голоса пользователей и другие звуки и преобразует принятые голоса пользователей в аудиоданные. Контроллер 120 может использовать голоса пользователей, вводимые через микрофон 194 при осуществлении вызова, или преобразовывать голоса пользователей в аудиоданные и сохранять аудиоданные в хранилище 140.
Когда камера 193 и микрофон 194 располагаются, контроллер 120 может осуществлять операции управления согласно голосам пользователей, вводимым через микрофон 194, или движениям пользователя, распознанным камерой 193. Таким образом, гибкое устройство 100 может действовать в режиме управления движением или режиме голосового управления. При работе в режиме управления движением, контроллер 120 активирует камеру 193, фотографирует пользователя, отслеживает изменения в движениях пользователя и осуществляет соответствующую операцию управления. При работе в режиме голосового управления, контроллер 120 может действовать в режиме распознавания голоса, который анализирует голоса пользователей, вводимые через микрофон, и осуществляет операции управления согласно проанализированным голосам пользователей.
Различные внешние входные порты могут дополнительно включаться для подключения к другим внешним компонентам, например, гарнитуре, мыши и LAN.
Вышеописанные операции контроллера 120 могут осуществляться программами, хранящимися в хранилище 140. В хранилище 140 могут храниться различные данные, например, программное обеспечение ОС для управления гибким устройством 100, соответствующие приложения, соответствующие данные, которые вводятся или задаются при реализации приложения, содержание, информацию изгибания и информацию интерактивного руководства по изгибу.
Контроллер 120 управляет общими операциями гибкого устройства 100 с использованием соответствующих программ, хранящихся в хранилище 140. Кроме того, контроллер 120 может управлять работой устройства 200 отображения, когда внешнее устройство 200 отображения подключено через интерфейс 160.
Контроллер 120 включает в себя RAM 121, ROM 122, главный CPU 123, интерфейсы с 1 по n 125-1~125-n и шину 126.
RAM 121, ROM 122, главный CPU 123 и интерфейсы с 1 по n 125-1~125-n могут соединяться друг с другом через шину 126.
Интерфейсы с 1 по n 125-1~125-n подключены к вышеперечисленным блокам. Одним из интерфейсов может быть сетевой интерфейс, который выполняет соединение с внешним устройством через сеть.
Главный CPU 123 осуществляет доступ к хранилищу 140, и осуществляет начальную загрузку с использованием ОС, хранящейся в хранилище 140. Кроме того, различные операции можно осуществлять с использованием соответствующих программ, содержания и данных, хранящихся в хранилище 140.
В ROM 122 хранятся наборы команд для начальной загрузки системы. Когда электрическая мощность обеспечивается путем ввода команды включения питания, главный CPU 122 копирует ОС, хранящуюся в хранилище 140, в RAM 121 согласно команде, хранящейся в ROM 122, и загружает систему посредством реализации ОС. По завершении начальной загрузки, главный CPU 123 копирует соответствующие прикладные программы, хранящиеся в хранилище 140, в RAM 121, и осуществляет соответствующие операции посредством реализации прикладных программ, скопированных в RAM 121.
Фиг. 42 полностью демонстрирует соответствующие блоки, которые могут быть смонтированы, когда гибкое устройство реализуется в виде сотового телефона. Таким образом, согласно иллюстративным вариантам осуществления, части модулей, показанных на фиг. 42 можно удалять, модифицировать, или можно добавлять новые блоки.
При этом, как описано выше, контроллер 120 может осуществлять различные операции посредством реализации программ, хранящихся в хранилище 140.
На Фиг. 43 показана схема, которая иллюстрирует класс программного обеспечения, хранящегося в хранилище 140. Согласно фиг. 43, ядро 141, промежуточное программное обеспечение 142, инфраструктура 143 гибкого UI и приложение 144 хранятся в хранилище 140.
Ядро 141 играет роль шлюза, который доставляет регистрационные сигналы датчиков, включенных в датчик 110, на промежуточное программное обеспечение 142 или инфраструктуру 143 гибкого UI.
Промежуточное программное обеспечение 142 включает в себя соответствующий программный модуль, который управляет операциями гибкого устройства 100. Согласно фиг. 43, промежуточное программное обеспечение 142 включает в себя модуль 142-1 X11, менеджер 142-2 приложений, менеджер 142-3 соединений, модуль 142-4 безопасности, системный менеджер 142-5, мультимедийную инфраструктуру 142-6, инфраструктуру 142-7 UI, менеджер 142-8 окон и менеджер 142-9 гибких окон.
Модуль 142-1 X11 представляет собой модуль, который принимает соответствующие события из соответствующего оборудования, включенного в гибкое устройство 100. События можно задавать по-разному, например, событие, порождающее системный предупреждающий сигнал, событие, открывающее или закрывающее реализацию конкретной программы, а также, событие регистрации прикосновения, изгибания или других пользовательских манипуляций.
Менеджер 142-2 приложений представляет собой модуль, который управляет реализацией ситуаций, относящихся к соответствующим приложениям, установленным в хранилище 140. Когда событие ввода команды для реализации приложения регистрируется из модуля 142-1 X11, менеджер 142-2 приложений вызывает и реализует приложение, соответствующее событию.
Менеджер 142-3 соединений представляет собой модуль, который поддерживает проводные или беспроводные сетевые соединения. Менеджер 142-3 соединений может включать в себя тот или иной конкретный модуль, например, модуль DNET и модуль UPnP.
Модуль 142-4 безопасности представляет собой модуль, который поддерживает сертификацию оборудования, разрешение запроса и безопасное хранение.
Системный менеджер 142-5 отслеживает ситуацию каждого блока в гибком устройстве и выдает результаты отслеживания на другие модули. Например, при коротком замыкании батареи, при возникновении ошибок или при разрыве соединения, системный менеджер 142-5 может выводить предупреждающие сообщения или предупреждающие звуковые сигналы, выдавая результаты отслеживания на инфраструктуру 142-7 UI.
Мультимедийная инфраструктура 142-6 представляет собой модуль, который воспроизводит мультимедийное содержание, хранящееся в гибком устройстве 100 или поступающее из внешних источников. Мультимедийная инфраструктура 142-6 может включать в себя модуль проигрывателя, модуль видеокамеры и модуль обработки звука. Соответственно, операции можно осуществлять для создания и воспроизведения экранов и аудиосигналов путем воспроизведения соответствующего мультимедийного содержания.
Инфраструктура 142-7 UI представляет собой модуль, который обеспечивает соответствующий UI. Инфраструктура 142-7 UI может включать в себя модуль составления изображения, который формирует соответствующие объекты изображения, модуль составления координат, который вычисляет координаты, которыми выражаются объекты изображения, модуль визуализации, который визуализирует сформированные объекты изображения в вычисленных координатах, и набор инструментов 2D/3D UI, который обеспечивает инструмент для формирования UI в формате 2D или 3D.
Менеджер 142-8 окон может регистрировать событие прикосновения, регистрируемое датчиком прикосновения, или регистрировать событие ввода, вводимое другим средством ввода. Менеджер 142-8 окон доставляет событие на инфраструктуру 142-7 UI, когда такое событие регистрируется, для осуществления операций, соответствующих событию.
Менеджер 142-9 гибких окон представляет собой модуль, который управляет системой согласно изгибанию, когда регистрируется изгибание. Менеджер 142-9 гибких окон доставляет событие изгиба на инфраструктуру 143 гибкого UI, когда регистрируется событие изгиба.
Инфраструктура 143 гибкого UI включает в себя модуль 143-1 подключения, ядро 143-2 изгиба и модуль 143-3 обработчика событий. Модуль 143-1 подключения участвует в подключении и загрузке инфраструктуры 143 гибкого UI к промежуточному программному обеспечению 142. На фиг. 43, ядро 143, промежуточное программное обеспечение 142 и приложение 144 можно использовать, как в программном обеспечении электронных устройств, известных из уровня техники, и инфраструктура 143 гибкого UI может соединяться с использованием модуля 143-1 подключения. Таким образом, сохраняя совместимость с системами, известными из уровня техники, можно дополнительно обеспечивать операции управления согласно изгибанию.
Обработчик 143-3 событий представляет собой модуль, который управляет операциями согласно изгибанию, когда происходит изгибание. Обработчик 143-3 событий принимает соответствующие события изгиба от менеджера 142-9 гибких окон через модуль 143-1 подключения, и классифицирует события согласно упорядочению по приоритету для каждого события. В данном случае, событие изгиба указывает событие, когда регистрируется конкретная форма изгибания.
Ядро 143-2 изгиба осуществляет указание событий изгиба, классифицированных обработчиком 143-3 событий, и согласует события изгиба с соответствующими программами, например, приложениями и виджетами. Соответственно, реализуются программы, согласованные с событиями изгиба.
Ядро 143-2 изгиба может передавать сигналы событий визуализации для дополнительной визуализации интерактивного руководства по изгибу, соответствующего каждой форме изгиба на объектах на инфраструктуру 142-7 UI через модуль 143-1 подключения. Таким образом, интерактивное руководство по изгибу может перекрываться и отображаться с каждым объектом на экране. Кроме того, когда происходит конкретное изгибание, и экран необходимо преобразовать, ядро 143-2 изгиба может доставлять сигналы событий визуализации, визуализирующие экран, подлежащий преобразованию, на инфраструктуру 142-7 UI через модуль 143-1 подключения.
Дополнительно, модуль приложений 144 включает в себя приложения для поддержки различных функций. Например, модуль приложений может включать в себя программный модуль для обеспечения различных услуг, например, программный модуль навигации, игровой модуль, модуль электронной книги, модуль календаря и модуль менеджера предупреждающих сигналов.
Кроме того, в хранилище 140 также могут храниться различные программы, например, модуль регистрации для анализа сигналов, регистрируемых на каждом датчике, модуль обмена сообщениями, например, программу обмена сообщениями, программы службы коротких сообщений (SMS) и службы мультимедийных сообщений (MMS) и программы электронной почты, программные модули объединителя информации вызова, модули VoIP и модули веб-браузера.
Как описано согласно фиг. 43, промежуточное программное обеспечение 142 может соединяться для управления работой системы согласно пользовательским манипуляциям, отличным от изгибания, и инфраструктуры 143 для управления работой системы согласно изгибанию. Соответственно, обеспечивается совместимость со структурой системного программного обеспечения, известного из уровня техники. Однако иллюстративный вариант осуществления не ограничивается программированием такой программной структуры, и, соответственно, и может предусматривать, что одна инфраструктура может управлять всеми обычными пользовательскими манипуляциями и манипуляциями с изгибом.
Главный CPU 123 отображает главный экран, когда гибкое устройство 100 включено или разблокировано. Соответствующие пиктограммы отображаются на главном экране. Главный CPU 123 передает соответствующие базовые данные для регулировки ситуации отображения интерактивного руководства по изгибу на графический процессор 130 с использованием инфраструктуры 143 гибкого UI и инфраструктуры 142-7 UI. Базовые данные могут представлять собой различные данные, например, форму, позицию, размер, цвет и время отображения интерактивного руководства по изгибу. Таким образом, как описано выше, графический процессор 130 генерирует интерактивное руководство по изгибу, добавляет объекты дисплея 150 и отображает их.
Соответствующие программные модули, представленные на фиг. 43, можно удалять, модифицировать или добавлять частично согласно типам и признакам гибкого устройства 100.
Хотя различные вышеописанные иллюстративные варианты осуществления описывают, что гибкое устройство 100 выполнено в плоской форме, гибкое устройство 100 можно реализовать в различных формах. Например, гибкое устройство 100 отображения можно реализовать посредством монтажа в основном корпусе, который изготавливается из негибкого материала.
Фиг. 44 демонстрирует иллюстративный вариант осуществления гибкого устройства, смонтированного в основном корпусе.
Согласно фиг. 44, гибкое устройство 100 может включать в себя основной корпус 4400, дисплей 150 и часть 4410 хвата.
Основной корпус 4400 играет роль оболочки, которая содержит дисплей 150. Когда гибкое устройство 100 включает в себя различные блоки, как показано на фиг. 44, на основном корпусе 4400 могут быть смонтированы другие блоки, помимо дисплея, и некоторые датчики.
Основной корпус 4400 включает в себя вращающийся валик, который скатывает дисплей 150. Таким образом, когда не используется, дисплей 150 можно скатывать с помощью вращающегося валика и монтировать в основном корпусе 4400.
Когда пользователь держит и тянет за часть 4410 хвата, скатывание отменяется, поскольку вращающийся валик вращается противоположно направлению скатывания, и дисплей 150 выходит из основного корпуса 4400. Вращающийся валик может включать в себя стопор. Таким образом, когда пользователь тянет за часть 4410 хвата сверх определенного расстояния, вращение вращающегося валика может останавливаться стопором, и дисплей 150 может фиксироваться. Таким образом, пользователь может реализовывать соответствующие функции с использованием дисплея 150 который выходит. Когда пользователь нажимает кнопку для подъема стопора, стопор поднимается, вращающийся валик вращается в противоположном направлении, что позволяет скатывать дисплей 150 в основном корпусе 4400. Стопор может быть выполнен в форме переключателя, который останавливает операцию шестерни для вращения вращающегося валика. Поскольку вращающийся валик и стопор можно использовать, как в структурах скатывания, известных из уровня техники, конкретное описание и объяснение, касающееся обоих из них, не включены.
Основной корпус 4400 включает в себя источник 180 электропитания (фиг. 45). Источник 180 электропитания можно реализовать как различные формы, например, разъем батареи, где располагается мгновенная батарея, аккумуляторная батарея, которая может подзаряжаться во множественном числе, и солнечная батарея, которая генерирует электроэнергию с использованием солнечного тепла. Когда реализуется аккумуляторная батарея, пользователь может заряжать источник электропитания путем соединения основного корпуса 4400 с внешним источником электропитания.
Хотя фиг. 44 демонстрирует цилиндрическую форму основного корпуса 4400, форма основного корпуса 4400 этим не ограничивается, и основной корпус можно реализовать в квадратной форме или других многоугольных формах. Кроме того, дисплей 150 также можно реализовать в форме, покрывающей внешнюю часть основного корпуса, или в различных других формах, а также в форме, где дисплей 150 выходит путем вытягивания по сравнению с монтажом в основном корпусе 4400.
Фиг. 45 демонстрирует гибкое устройство, от которого источник 180 электропитания может отсоединяться и к которому он может присоединяться. Согласно фиг. 45, источник 180 электропитания может располагаться на одной границе гибкого устройства, отсоединенный и присоединенный.
Источник 180 электропитания может быть реализован из гибкого материала и изгибаться с дисплеем 150. В частности, источник 180 электропитания может включать в себя токоприемник отрицательной полярности, электрод отрицательной полярности, электролит, электрод положительной полярности, токоприемник положительной полярности, и участки обкладки, которые покрывают предыдущие блоки.
Например, токоприемник можно реализовать как сплав металлов, например, группы TiNi, имеющий хорошие упругие свойства, чистый металл, например, медь алюминий, чистый металл, покрытый углеродом, проводящий материал, например, углерод или углеволокно, или проводящий полимер, например полипиррол.
Электрод отрицательной полярности может быть изготовлен из материала электрода отрицательной полярности, например, металла, а именно, лития, Na, Zn, Mg, Cd, металлических сплавов для накопления водорода, Pb, неметалла, а именно, углерода, и полимерного материала электрода, а именно, органического соединения серы.
Электрод положительной полярности может быть изготовлен из материала электрода положительной полярности, например, серы и сульфида металла, оксида лития и переходного металла LiCoO2, SOCl2, MnO2, Ag2O, Cl2, NiCl2, NiOOH, и полимерного электрода. Электролит можно реализовать как гелевый тип, который использует PEO, PVdF, PMMA или PVAC.
Участки обкладки могут использовать полимерную смолу, известную из уровня техники. Например, можно использовать PVC, HDPE или эпоксидную смолу. Дополнительно, когда материал может свободно искривляться и изгибаться, в то же время, предотвращая повреждение батареи, материал можно использовать для участков обкладки.
Электрод положительной полярности и электрод отрицательной полярности в источнике 180 электропитания могут, соответственно, включать в себя разъем, электрически соединенный с внешними устройствами.
Согласно фиг. 45, разъем сформирован в форме, проецируемой от источника 180 электропитания, и канавки, соответствующие позиции, размеру и форме разъема, сформированы на дисплее 150. Таким образом, путем объединения разъема и канавок, источник 180 электропитания может объединяться с дисплеем 150. Разъем источника 180 электропитания может соединяться с площадкой подключения электропитания (не показана) в гибком устройстве 100 и обеспечивать электрическую мощность.
Хотя фиг. 45 показывает, что источник 180 электропитания может отсоединяться и присоединяться на одной боковой границе гибкого устройства 100, это является всего лишь иллюстрацией. Позиция и форма источника 180 электропитания может изменяться согласно признакам изделия. Например, когда гибкое устройство 100 является изделием, имеющим определенную глубину, источник 180 электропитания может быть смонтировано на задней стороне гибкого устройства 100.
Как описано выше, когда обеспечивается интерактивное руководство по изгибу, пользователь может осуществлять ошибочное изгибание, или может осуществляться непреднамеренное изгибание. В этом случае, гибкое устройство 100 может обеспечивать обратную связь. Такая обратная связь может обеспечиваться с использованием визуальных, слуховых и тактильных органов чувств.
Фиг. 46 показывает, что обратная связь обеспечивается с использованием визуального сообщения. Согласно фиг. 46, сообщение E для информирования о том, что произошло неправильное изгибание, может отображаться на дисплее 150. Вместо визуальной обратной связи, показанной на фиг. 46, также можно обеспечивать голосовую обратную связь. Примеры голосовой обратной связи могут включать в себя различные сообщения, например, предупреждающие звуковые сигналы, голосовые сообщения для информирования о неправильном вводе и голосовые сообщения для объяснения правильного ввода изгибания. Примеры тактильной обратной связи могут включать в себя вибрации всего гибкого устройства 100, вибрацию на части поверхности, с которой контактирует тело пользователя, операции приведения в действие для изменения неправильной линии изгиба на выпуклую форму, операции приведения в действие для автоматического изменения гибкого устройства 100 к правильной форме изгиба, операции для информирования о неправильном вводе путем генерации емкостной электроэнергии на части, с которой контактирует тело пользователя, и операцию для информирования неправильный ввод путем генерации тепла на части, с которой контактирует тело пользователя.
В итоге, согласно обратной связи, пользователь может непосредственно определить, осуществляется ли манипуляция с изгибом, которую он не намеревался производить, или осуществляется ли неверная манипуляция с изгибом, и осуществляет в ответ следующее движение. Вышеприведенный иллюстративный вариант осуществления описывает операции обратной связи в отношении непреднамеренных или неправильных манипуляций с изгибом. Однако такие операции обратной связи также могут расширяться и однородно применяться к неправильной тактильной манипуляции, неправильной двигательной манипуляции и неправильной голосовой манипуляции. Кроме того, когда операция осуществляется путем определения манипуляции с изгибом, которую пользователь намерен произвести, может обеспечиваться положительная обратная связь.
Хотя различные вышеописанные иллюстративные варианты осуществления описывают, что интерактивное руководство по изгибу всегда отображается с различными типами объектов, интерактивное руководство по изгибу может активироваться или деактивироваться по выбору пользователя согласно другому примерному варианту осуществления. Таким образом, меню для управления включением или отключением интерактивного руководства по изгибу может отображаться на экране гибкого устройства 100, или на основном корпусе можно устанавливать другую функциональную клавишу. Таким образом, когда пользователь выбирает соответствующее меню или функциональную клавишу, интерактивное руководство по изгибу можно по выбору добавлять и отображать или удалять. Дополнительно, управление включением или отключением интерактивного руководства по изгибу можно осуществлять посредством отдельно заданного изгибания. Например, когда согласуется операция складывания, интерактивное руководство по изгибу может отображаться посредством одного складывания и удаляться посредством следующего складывания.
Интерактивное руководство по изгибу может не отображаться в обычной ситуации и может отображаться в течение определенного времени, когда пользователь держит гибкое устройство 100 для осуществления изгибания.
Фиг. 47 демонстрирует пример экрана состав гибкого устройства 100 согласно иллюстративному варианту осуществления. Согласно фиг. 47, фальш-панель 4710 формируется в граничной области дисплея 150 в гибком устройстве 100.
Гибкое устройство 100 отображает экран 4700 посредством дисплея 150, когда реализуется конкретное приложение. В частности, фиг. 47 показывает, что веб-страница отображается после приема данные веб-страницы из веб-сервера посредством реализации веб-браузера. Когда осуществляется изгибание, производится операция управления, соответствующая изгибанию. Однако интерактивное руководство по изгибу не отображается.
Пользователь может держать фальш-панель 4710 для изгибания гибкого устройства 100. Контроллер 120 гибкого устройства 100 может регистрировать, держит ли пользователь фальш-панель 4710, с использованием датчика хвата или датчика давления, который описан выше. При определении, что пользователь держит фальш-панель 4710 одной рукой или обеими руками, контроллер 120 отображает интерактивные руководства 4721~4727 по изгибу. Интерактивные руководства 4721~4727 по изгибу могут отображаться только при отображении с функциями реализующегося в данный момент приложения. В частности, согласно фиг. 47, то, что отображается, может включать в себя (1) интерактивное руководство 4721 по изгибу, которое выражает изгибание, которое изгибает и распрямляет верхний левый край, (2) интерактивное руководство 4722 по изгибу, которое выражает изгибание, которое изгибает и распрямляет нижний левый край, (3) интерактивное руководство 4723 по изгибу, которое выражает изгибание, которое изгибает и распрямляет нижний правый край, (4) интерактивное руководство 4724 по изгибу, которое выражает изгибание, которое изгибает и распрямляет верхний правый край, (5) интерактивное руководство 4725 по изгибу, которое выражает изгибание, которое изгибает и распрямляет левую границу, (6) интерактивное руководство 4726 по изгибу, которое выражает складывание, которое складывает центр, и (7) интерактивное руководство 4727 по изгибу, которое выражает изгибание, которое изгибает и распрямляет правую границу.
Пользователь может осуществлять конкретные типы изгибания согласно, по меньшей мере, одному изгибанию, наблюдая интерактивные руководства 4721~4727 по изгибу. Таким образом, производятся операции управления, соответствующие изгибанию.
Например, когда верхний правый край изгибается и распрямляется согласно интерактивному руководству 4721 по изгибу, экран 4700 движется в направлении вниз направо. Кроме того, когда другие краевые части изгибаются и выпрямляются согласно интерактивным руководствам 4722, 4723 и 4724 по изгибу, область веб-страницы, которая отображается на экране, может перемещаться согласно областям изгиба.
Когда левая граница изгибается и выпрямляется согласно интерактивному руководству 4725 по изгибу, страница преобразуется в предыдущую страницу. Когда правая граница изгибается и выпрямляется согласно интерактивному руководству 4727 по изгибу, страница преобразуется в следующую страницу. При этом, когда складывание осуществляется согласно интерактивному руководству 4726 по изгибу, веб-обозревание заканчивается, и веб-страница 4700 исчезает.
Хотя фиг. 47 демонстрирует только интерактивные руководства 4721~4727 по изгибу в форме линии, это является всего лишь иллюстрацией, и символы, изображения и тексты, указывающие операции управления, соответствующие изгибанию, можно выразить совместно на окруженных областях или линиях 4721~4727 интерактивных руководств по изгибу.
Способ отображения объектов с изгибанием, способ отображения интерактивного руководства по изгибу, соответствующего изгибанию, и способ управления, соответствующий изгибанию, согласно различным вышеизложенным иллюстративным вариантам осуществления можно реализовать как программы и обеспечивать гибкому устройству.
Например, можно обеспечивать нетранзиторный (некратковременный) компьютерно-читаемый носитель, где хранятся программы, которые осуществляют обеспечение экрана, включающего в себя объекты, объединенные с интерактивным руководством по изгибу в отношении изгиба, регистрируя изгибание гибкого устройства и осуществляя операции, соответствующие объектам, когда изгиб, заданный относительно этих объектов, отображается на экране.
Дополнительно, можно обеспечивать нетранзиторный компьютерно-читаемый носитель, где хранятся программы, которые осуществляют способ отображения интерактивного руководства по изгибу согласно различным вышеизложенным иллюстративным вариантам осуществления.
Под нетранзиторным считываемым носителем понимают носитель, где квазипостоянно хранятся данные, которые могут считываться устройствами, а не носитель, где временно хранятся данные, например, регистр, кэш-память или оперативная память. В частности, вышеприведенные различные приложения или программы могут храниться и обеспечиваться на нетранзиторном считываемом носителе, например, CD, DVD, жестком диске, диске Blu-ray, USB, карте памяти или ROM.
Кроме того, вышеописанные иллюстративные варианты осуществления являются всего лишь иллюстративными и не предусматривают ограничений. Настоящие принципы можно без труда применять к другим типам устройств. Кроме того, описание концепций иллюстративных вариантов осуществления настоящего изобретения предназначено для иллюстрации, но не для ограничения объема формулы изобретения.
| название | год | авторы | номер документа |
|---|---|---|---|
| ГИБКОЕ УСТРОЙСТВО ОТОБРАЖЕНИЯ И СПОСОБ УПРАВЛЕНИЯ ИМ | 2013 |
|
RU2609093C2 |
| ГИБКОЕ УСТРОЙСТВО ОТОБРАЖЕНИЯ И СООТВЕТСТВУЮЩИЙ СПОСОБ УПРАВЛЕНИЯ | 2013 |
|
RU2653303C2 |
| ГИБКОЕ УСТРОЙСТВО ОТОБРАЖЕНИЯ И СПОСОБ УПРАВЛЕНИЯ ИМ | 2013 |
|
RU2652459C2 |
| ГИБКОЕ УСТРОЙСТВО ОТОБРАЖЕНИЯ И СООТВЕТСТВУЮЩИЙ СПОСОБ ОТОБРАЖЕНИЯ | 2013 |
|
RU2656977C2 |
| ГИБКОЕ УСТРОЙСТВО И СПОСОБ УПРАВЛЕНИЯ ИМ | 2013 |
|
RU2632413C2 |
| ГИБКОЕ УСТРОЙСТВО И СПОСОБ ДЛЯ УПРАВЛЕНИЯ ЕГО РАБОТОЙ | 2013 |
|
RU2628174C2 |
| ГИБКОЕ УСТРОЙСТВО ОТОБРАЖЕНИЯ И СПОСОБ ОБЕСПЕЧЕНИЯ ОБРАТНОЙ СВЯЗИ ДЛЯ НЕГО | 2013 |
|
RU2617385C2 |
| СПОСОБ И УСТРОЙСТВО УПРАВЛЕНИЯ РАСПИСАНИЕМ С ИСПОЛЬЗОВАНИЕМ ОПТИЧЕСКОГО УСТРОЙСТВА ЧТЕНИЯ СИМВОЛОВ | 2012 |
|
RU2621626C2 |
| СПОСОБ ПРЕДОСТАВЛЕНИЯ ОБРАТНОЙ СВЯЗИ В ОТВЕТ НА ПОЛЬЗОВАТЕЛЬСКИЙ ВВОД И ТЕРМИНАЛ, ЕГО РЕАЛИЗУЮЩИЙ | 2014 |
|
RU2675153C2 |
| СИСТЕМЫ И СПОСОБЫ ПРЕДОСТАВЛЕНИЯ УВЕДОМЛЕНИЙ СИСТЕМНОГО УРОВНЯ В МУЛЬТИМЕДИЙНОЙ КОНСОЛИ | 2006 |
|
RU2408085C2 |
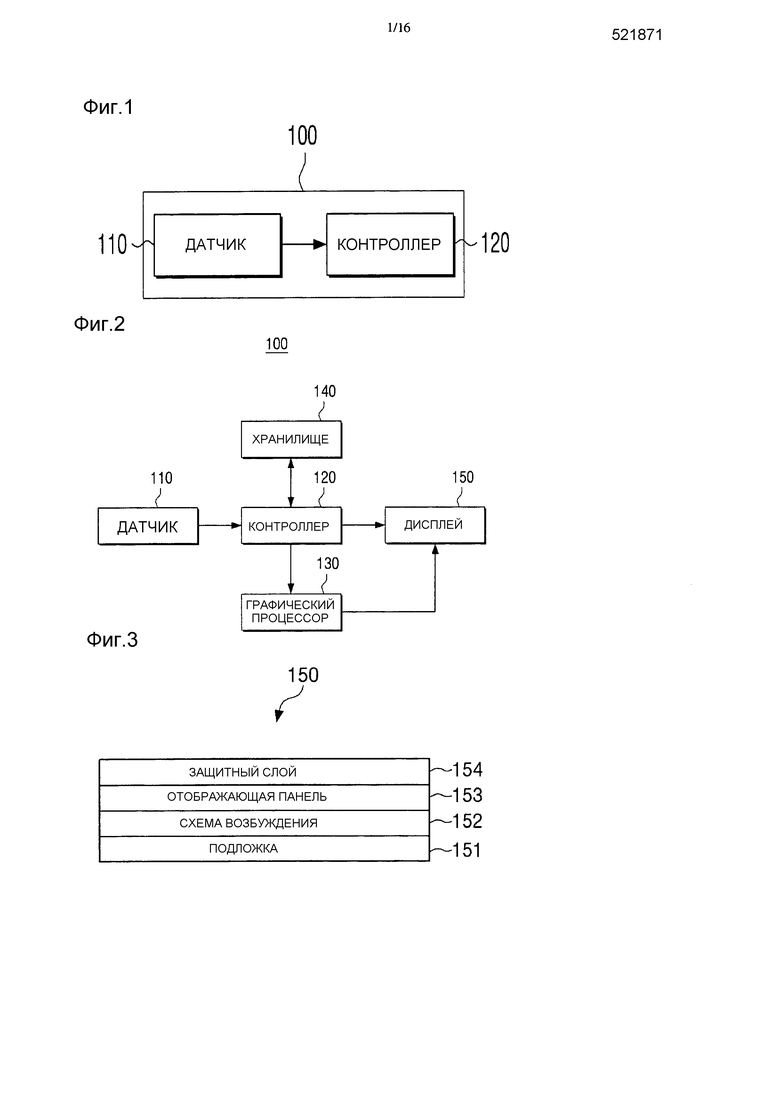


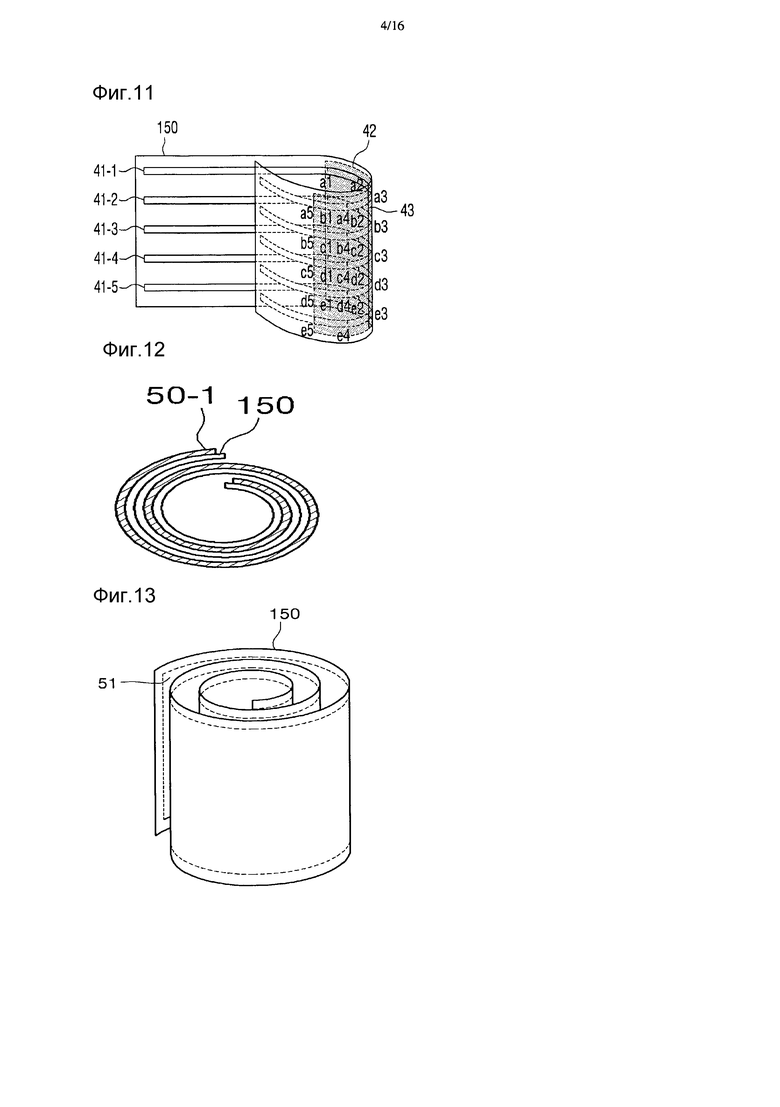



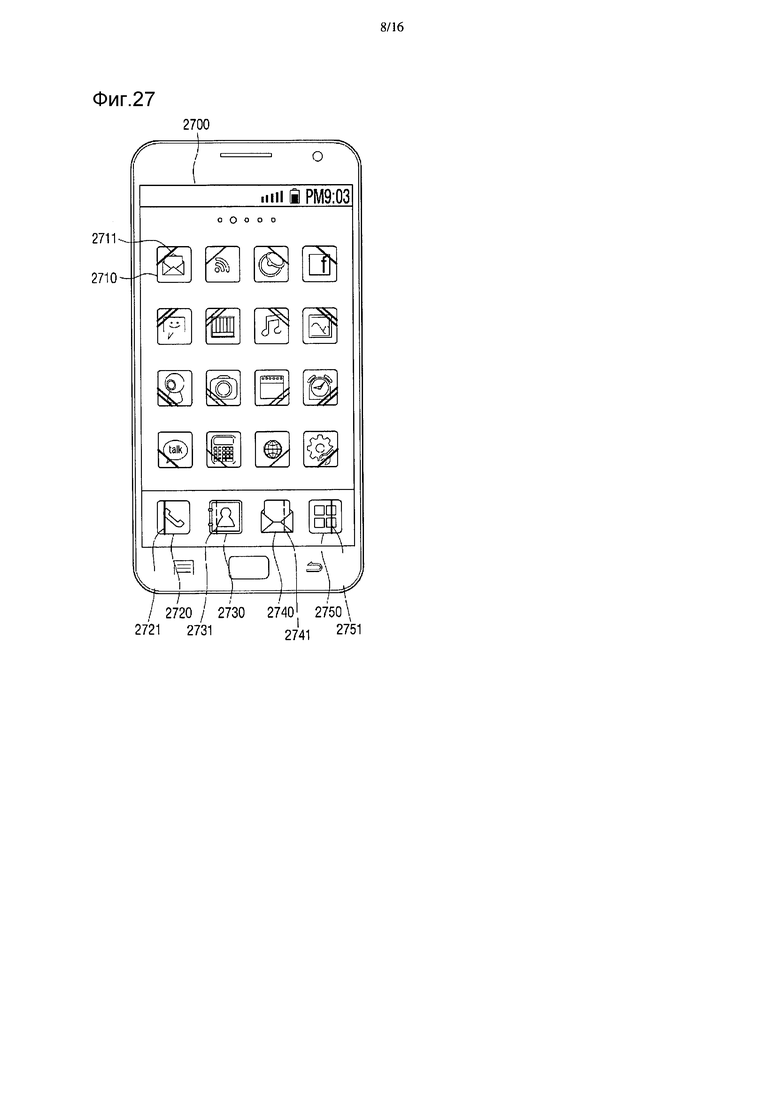


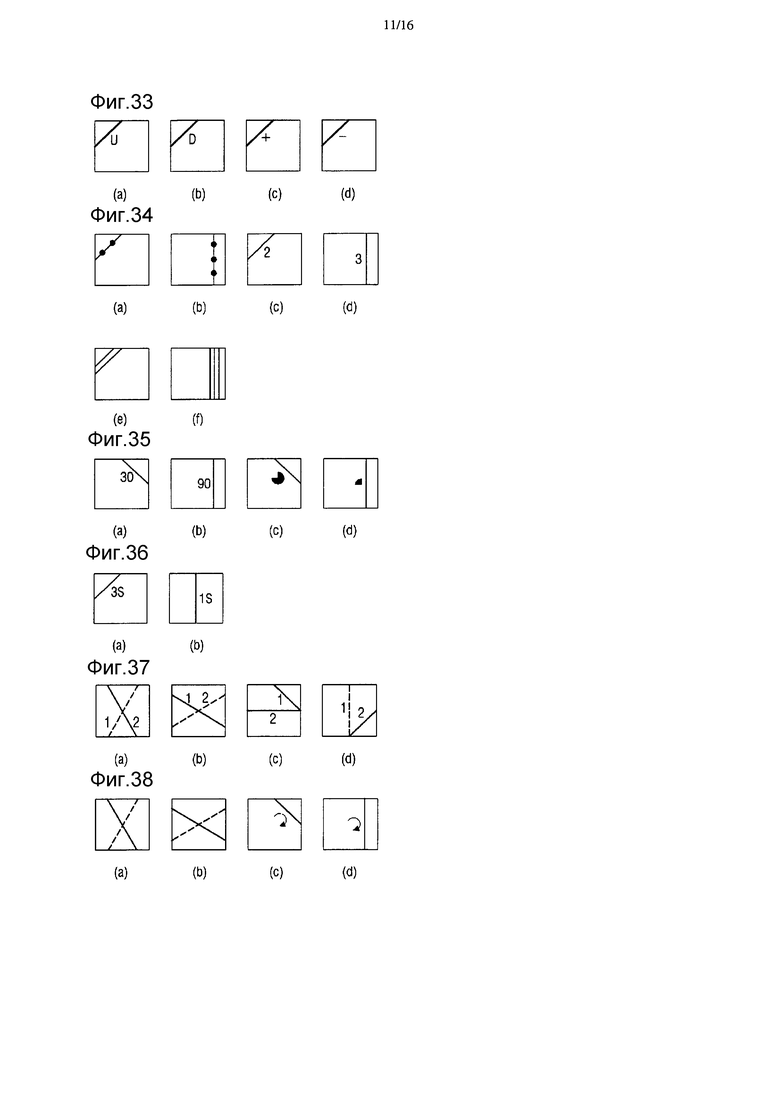
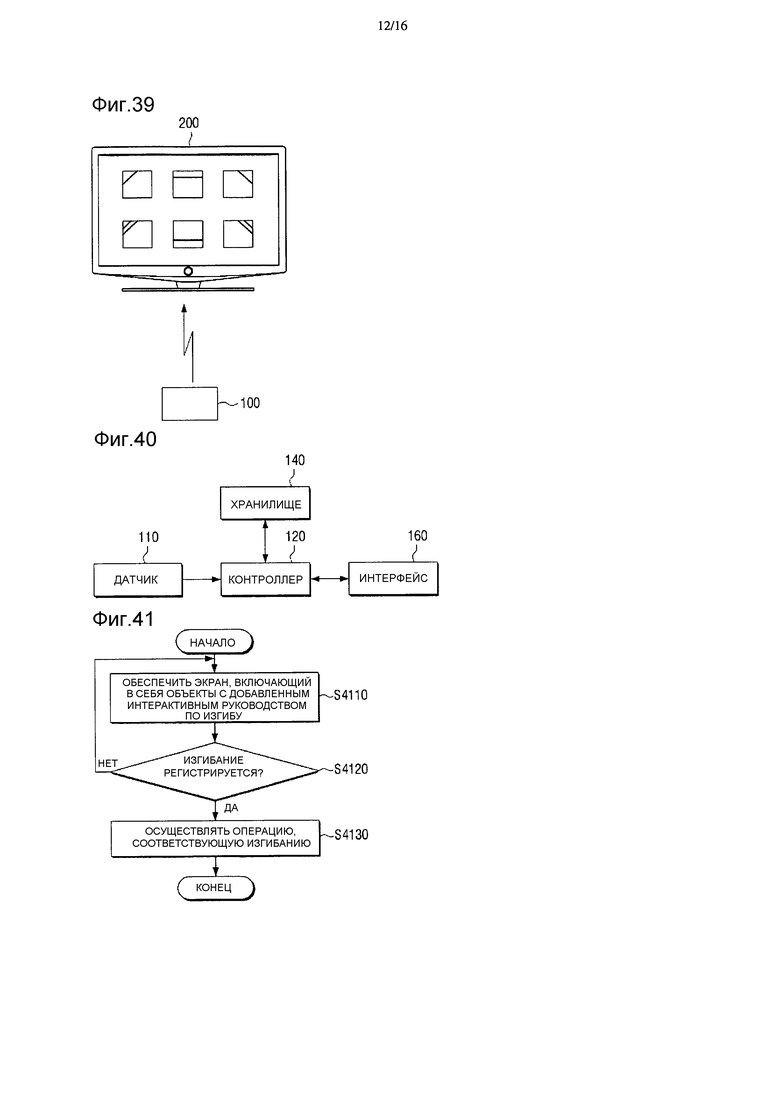




Изобретение относится к гибкому устройству отображения. Технический результат – эффективное управление гибким устройством отображения. Гибкое устройство отображения, содержащее дисплей, датчик, сконфигурированный с возможностью регистрации деформации гибкого устройства, и контроллер, сконфигурированный с возможностью управления дисплеем для отображения множества объектов и множества интерактивных руководств, соответствующих множеству объектов, и в ответ на деформацию, соответствующую зарегистрированному интерактивному руководству, выполнения операции, связанной с объектом, соответствующим зарегистрированному интерактивному руководству, причем каждый из множества объектов соответствует каждому соответствующему интерактивному руководству из множества интерактивных руководств, при этом каждое из множества интерактивных руководств отображается в соответствующем объекте и интерактивные руководства множества интерактивных руководств отличаются друг от друга. 2 н. и 18 з.п. ф-лы, 47 ил. 
1. Гибкое устройство отображения, содержащее:
дисплей;
датчик, сконфигурированный с возможностью регистрации деформации гибкого устройства; и
контроллер, сконфигурированный с возможностью:
управления дисплеем для отображения множества объектов и множества интерактивных руководств, соответствующих множеству объектов, и
в ответ на деформацию, соответствующую зарегистрированному интерактивному руководству, выполнения операции, связанной с объектом, соответствующим зарегистрированному интерактивному руководству,
причем каждый из множества объектов соответствует каждому соответствующему интерактивному руководству из множества интерактивных руководств;
при этом каждое из множества интерактивных руководств отображается в соответствующем объекте и интерактивные руководства множества интерактивных руководств отличаются друг от друга.
2. Гибкое устройство отображения по п. 1, дополнительно содержащее:
интерфейс, сконфигурированный с возможностью соединения с устройством отображения,
причем контроллер сконфигурирован с возможностью передачи информации, касающейся по меньшей мере одного объекта и интерактивного руководства, добавленного к по меньшей мере одному объекту, на устройство отображения, соединенное с гибким устройством отображения, и сконфигурирован с возможностью передачи сигналов управления на устройство отображения, предписывающих выполнять операцию управления, основываясь на изгибании, когда регистрируется изгибание.
3. Гибкое устройство отображения по п. 1, дополнительно содержащее:
графический процессор, сконфигурированный с возможностью обеспечения экрана, содержащий по меньшей мере один из объектов, дополненных интерактивным руководством;
при этом дисплей сконфигурирован с возможностью отображать экран.
4. Гибкое устройство отображения по п. 3, в котором интерактивное руководство отображает изгибание, которое уникально задано в отношении каждого из по меньшей мере одного объекта.
5. Гибкое устройство отображения по п. 3, в котором интерактивное руководство отображает изгибание, которое по-разному задано согласно отображаемой позиции каждого по меньшей мере объекта на экране.
6. Гибкое устройство отображения по п. 3, в котором, когда экран преобразуется, контроллер одинаково задает изгибание, которое предварительно задано относительно каждой отображаемой позиции каждого по меньшей мере одного объекта на экране, каждому из новых объектов, которые вновь отображаются после преобразования, согласно их отображаемой позиции, и
интерактивное руководство добавляется к новым объектам и отображается основываясь на изгибе, заданном относительно новых объектов.
7. Гибкое устройство отображения по п. 3, в котором объекты являются пиктограммами приложения, и контроллер реализует приложение, соответствующее по меньшей мере одному объекту, когда регистрируется изгиб, заданный относительно объекта.
8. Гибкое устройство отображения по п. 3, в котором экран содержит область ввода для ввода знаков или символов,
по меньшей мере один объект представляет собой кнопку для ввода этих знаков и символов, и
контроллер отображает знаки или символы, соответствующие по меньшей мере одному объекту в области ввода, когда регистрируется изгиб, заданный относительно этого объекта.
9. Гибкое устройство отображения по п. 3, в котором интерактивное руководство содержит руководство в виде изображения линии, в котором по меньшей мере одно из ширины линии, количества линий, формы линии, направления линии, позиции линии, угла линии, цвета линии, размера линии и длины линии регулируется согласно характеристике изгибания.
10. Гибкое устройство отображения по п. 9, в котором интерактивное руководство дополнительно содержит по меньшей мере одно из знакового руководства и символьного руководства, которые отображаются с руководством в виде изображения линии.
11. Способ управления гибким устройством отображения, содержащий этапы, на которых:
обеспечивают экран на дисплее, который содержит по меньшей мере один объект и интерактивное руководство по изгибу;
регистрируют деформацию гибкого устройства отображения;
управляют дисплеем для отображения множества объектов и множества интерактивных руководств, соответствующих множеству объектов, и
в ответ на деформацию, соответствующую зарегистрированному интерактивному руководству, выполняют операцию, связанную с объектом, соответствующим зарегистрированному интерактивному руководству,
причем каждый из множества объектов соответствует каждому соответствующему интерактивному руководству из множества интерактивных руководств; и
при этом каждое из множества интерактивных руководств отображается в соответствующем объекте, и интерактивные руководства множества интерактивных руководств отличаются друг от друга.
12. Способ управления по п. 11, в котором обеспечение экрана содержит передачу информации на устройство отображения, связанное с гибким устройством отображения, касающейся по меньшей мере одного объекта и интерактивного руководства, добавленного к по меньшей мере одному объекту, и отображение экрана посредством устройства отображения.
13. Способ управления по п. 11, в котором обеспечение экрана дополнительно содержит:
обеспечение экрана, который содержит по меньшей мере один объект, соответственно, дополненный интерактивным руководством; и
отображение экрана посредством дисплея, смонтированного на гибком устройстве отображения.
14. Способ управления по п. 13, в котором интерактивное руководство отображает изгибание, которое уникально задано в отношении каждого по меньшей мере одного объекта.
15. Способ управления по п. 13, в котором интерактивное руководство отображает изгибание, которое по-разному задано согласно позиции маркировки каждого по меньшей мере одного объекта на экране.
16. Способ управления по п. 13, в котором, когда выполняют преобразование экрана, одинаково задают изгибание, которое предварительно задано относительно каждой отображаемой позиции каждого по меньшей мере одного объекта на экране перед преобразованием, каждому из новых объектов, которые вновь отображаются после преобразования, согласно их отображаемой позиции, и
добавляют интерактивное руководство к новым объектам, основываясь на изгибе, заданном относительно новых объектов.
17. Способ управления по п. 13, в котором
по меньшей мере один объект является пиктограммой приложения, и
выполнение операции содержит обеспечение приложения, соответствующего по меньшей мере одному объекту, когда регистрируется изгиб, заданный относительно объекта.
18. Способ управления по п. 13, в котором
экран содержит область ввода для ввода знаков или символов,
по меньшей мере один объект представляет собой кнопку для ввода этих знаков и символов, и
выполнение операции содержит отображение знаков или символов, соответствующих по меньшей мере одному объекту в области ввода, когда регистрируется изгиб, заданный относительно этого объекта.
19. Способ управления по п. 13, в котором интерактивное руководство содержит руководство в виде изображения линии, в котором по меньшей мере одно из ширины линии, количества линий, формы линии, направления линии, позиции линии, угла линии, цвета линии, размера линии и длины линии регулируется согласно характеристике изгибания.
20. Способ управления по п. 13, в котором интерактивное руководство дополнительно содержит по меньшей мере одно из знакового руководства и символьного руководства, которые отображаются с руководством в виде изображения линии.
| Способ приготовления лака | 1924 |
|
SU2011A1 |
| Изложница с суживающимся книзу сечением и с вертикально перемещающимся днищем | 1924 |
|
SU2012A1 |
| Приспособление для суммирования отрезков прямых линий | 1923 |
|
SU2010A1 |
| Приспособление для суммирования отрезков прямых линий | 1923 |
|
SU2010A1 |

