Область техники, к которой относится изобретение
Настоящее изобретение относится к гибкому устройству отображения и способу обеспечения обратной связи для него. В частности, настоящее изобретение относится к гибкому устройству отображения, способному обеспечивать обратную связь согласно преобразованию формы, и способу обеспечения обратной связи для него.
Уровень техники
Вследствие развития электронной технологии, были разработаны различные типы устройств отображения. В частности, такие устройства отображения, как телевизоры (ТВ), персональные компьютеры (ПК), портативные компьютеры, планшетные ПК, мобильные телефоны, смартфоны, и проигрыватели Motion Picture Experts Group (MPEG)-2 Audio Layer III (MP3) широко использовались в большинстве домохозяйств, что обеспечило высокую скорость проникновения на рынок таких устройств отображения.
Чтобы удовлетворить потребности пользователей в более новых и более разнообразных функциях, в последнее время были предприняты усилия для разработки новых типов устройств отображения, так называемых дисплеев нового поколения.
Примером дисплея нового поколения является гибкое устройство отображения. Гибкое устройство отображения это устройство отображения, отличающееся признаком гибкости наподобие бумаги.
Гибкое устройство отображения может изгибаться и принимать различные формы в результате пользовательской манипуляции, что позволяет использовать его в различных целях. Например, гибкое устройство отображения может реализовывать портативное устройство, например, мобильные телефоны, планшетные ПК, электронные фоторамки, карманные персональные компьютеры (КПК) и MP3-проигрыватели. Однако гибкий дисплей можно повредить чрезмерным изгибом, и пользователь не имел возможности узнать, может ли изгиб гибкого дисплея привести к повреждению гибкого дисплея.
Соответственно, существует потребность в способе повышения удобства для пользователя за счет обеспечения различных обратных связей согласно преобразованию формы гибкого устройства отображения.
Вышеприведенная информация представлена как фоновая информация только для помощи в понимании настоящего изобретения. Никакого определения не производилось, и никакого утверждения не производится, в отношении того, можно ли применять что-либо из вышеперечисленного в качестве уровня техники в отношении настоящего изобретения.
Раскрытие изобретения
Техническая проблема
Аспекты настоящего изобретения предусматривают решение по меньшей мере вышеупомянутых проблем и/или недостатков и обеспечение по меньшей мере описанных ниже преимуществ. Соответственно, аспект настоящего изобретения предусматривает обеспечение гибкого устройства отображения, которое обеспечивает пользователей обратной связью с предупреждением согласно степени изгиба, и соответствующий способ обеспечения обратной связи.
Решение проблемы
Согласно аспекту настоящего изобретения, предусмотрено гибкое устройство отображения. Гибкое устройство отображения включает в себя датчик, выполненный с возможностью обнаружения степени изгиба устройства, средство обеспечения обратной связи, выполненное с возможностью обеспечения обратной связи согласно обнаруженному изгибу, и контроллер, выполненный с возможностью управления средством обеспечения обратной связи для обеспечения обратной связи, когда обнаруженная степень изгиба превышает пороговое значение.
Гибкое устройство отображения может дополнительно включать в себя хранилище, выполненное с возможностью сохранения формы обеспечения обратной связи, заданной согласно степени изгиба, причем контроллер может управлять средством обеспечения обратной связи для обеспечения различной обратной связи согласно обнаруженной степени изгиба согласно форме обеспечения обратной связи, хранящейся в хранилище.
Гибкое устройство отображения может дополнительно включать в себя хранилище, выполненное с возможностью сохранения порогового значения, которое задано согласно области изгиба, причем контроллер управляет средством обеспечения обратной связи для обеспечения обратной связи на области изгиба, где происходит изгиб, превышающий пороговое значение, с использованием порогового значения, которое задается по-разному согласно области изгиба и хранится в хранилище.
Контроллер может управлять средством обеспечения обратной связи для обеспечения обратной связи в положение, соответствующее области изгиба, согласно положению области изгиба, где происходит изгиб, превышающий пороговое значение.
Когда изгиб, превышающий пороговое значение, происходит повторно, контроллер может отсчитывать повторения изгиба и управлять средством обеспечения обратной связи для обеспечения различной обратной связи согласно количеству повторений.
Гибкое устройство отображения может дополнительно включать в себя дисплей, выполненный с возможностью отображения экрана, причем контроллер может управлять средством обеспечения обратной связи для обеспечения по меньшей мере одной из экранной обратной связи для изменения состояния отображения экрана или для вывода графического сообщения, звуковой обратной связи для вывода предупреждающего звукового сигнала или голосового сообщения и тактильной обратной связи для формирования вибрации.
Экранная обратная связь может изменять состояние отображения, изменяя по меньшей мере одно из цвета и яркости экрана или мигая экраном.
Гибкое устройство отображения может дополнительно включать в себя хранилище, в котором, когда обнаруженная степень изгиба превышает пороговое значение, контроллер может сохранять информацию, относящуюся к изгибу, в хранилище.
Гибкое устройство отображения может дополнительно включать в себя блок связи, выполненный с возможностью осуществления связи с сервером, причем контроллер может передавать информацию, относящуюся к изгибу, на сервер, и принимать услугу, относящуюся к изгибу, от сервера.
Информация, относящаяся к изгибу, может включать в себя информацию, относящуюся по меньшей мере к одному из положения изгиба, степени изгиба и количества изгибных манипуляций.
Когда изгиб, превышающий пороговое значение, обнаружен сверх пороговой величины, контроллер может изменять пороговое значение.
Пороговое значение может включать в себя радиус кривизны.
Согласно другому аспекту настоящего изобретения, гибкое устройство отображения включает в себя дисплей, и элемент, выполненный с возможностью монтажа в части дисплея и включающий в себя коэффициент предельного напряжения, причем, когда на части дисплея, в которой смонтирован элемент, совершается изгибная манипуляция, превышающая коэффициент предельного напряжения, элемент разрушается.
Согласно еще одному аспекту настоящего изобретения, способ обеспечения обратной связи гибкого устройства отображения включает в себя обнаружение изгиба гибкого устройства отображения и обеспечение обратной связи по изгибу, когда обнаруженная степень изгиба превышает пороговое значение.
В операции обеспечения обратной связи может обеспечиваться различная обратная связь согласно обнаруженной степени изгиба согласно ранее сохраненной форме обеспечения обратной связи, которая задана согласно степени изгиба.
В операции обеспечения обратной связи, обратная связь на области изгиба, где происходит изгиб, превышающее пороговое значение, может обеспечиваться с использованием предварительно сохраненного порогового значения, которое задано согласно области изгиба.
В операции обеспечения обратной связи, обратная связь может обеспечиваться в положение, соответствующее области изгиба, согласно положению области изгиба, где происходит изгиб, превышающий пороговое значение.
В операции обеспечения обратной связи, когда изгиб, превышающий пороговое значение, происходит повторно, различная обратная связь может обеспечиваться согласно количеству повторений изгиба.
В операции обеспечения обратной связи может обеспечиваться по меньшей мере один из экранной обратной связи для изменения состояния отображения экрана или для вывода графического сообщения, звуковой обратной связи для вывода предупреждающего звукового сигнала или голосового сообщения и тактильной обратной связи для формирования вибрации.
Способ может дополнительно включать в себя сохранение информации, относящейся к изгибу, когда обнаруженная степень изгиба превышает пороговое значение.
Дополнительные и/или другие аспекты и преимущества изобретения будут отчасти изложены в нижеследующем описании и отчасти будут явствовать из описания или могут быть изучены при практическом применении изобретения.
Другие аспекты, преимущества и заметные признаки изобретения будут понятны специалистам в данной области техники из нижеследующего подробного описания, которое, будучи взято совместно с прилагаемыми чертежами, раскрывает различные варианты осуществления настоящего изобретения.
Положительные результаты изобретения
Ввиду вышеизложенного, предусмотрено гибкое устройство отображения, которое повышает удобство для пользователя.
Краткое описание чертежей
Вышеприведенные другие аспекты, признаки и преимущества определенных вариантов осуществления настоящего изобретения явствуют из нижеследующего описания, приведенного вместе с прилагаемыми чертежами, в которых:
фиг. 1 - блок-схема конфигурации гибкого устройства отображения, согласующейся с вариантом осуществления настоящего изобретения;
фиг. 2 - базовая конфигурация дисплея гибкого устройства отображения, согласующегося с вариантом осуществления настоящего изобретения;
фиг. 3A, 3B, 3C, 4A, 4B, 5A, 5B, 5C, 6A, 6B, 7A, 7B, 7C, 8A, 8B, 8C, 8D, 9A, 9B, 10A и 10B - способы обнаружения изгиба согласно различным вариантам осуществления настоящего изобретения;
фиг. 11 - блок-схема подробной конфигурации гибкого устройства отображения для описания операций, согласующихся с различными вариантами осуществления настоящего изобретения;
фиг. 12 - подробная конфигурация контроллера, показанного на фиг. 11;
фиг. 13 - конфигурация программного обеспечения в хранилище для поддержки операций контроллера, согласующихся с различными вариантами осуществления настоящего изобретения;
фиг. 14, 15, 16, 17, 18, 19, 20, 21, 22 и 23 - способы обеспечения обратной связи, согласующиеся с различными вариантами осуществления настоящего изобретения;
фиг. 24 - пример формы гибкого устройства отображения, встроенного в основной корпус согласно варианту осуществления настоящего изобретения;
фиг. 25 - гибкое устройство отображения, включающее в себя отсоединяемый источник питания; и
фиг. 26 - блок-схема операций способа обеспечения обратной связи, согласующегося с вариантом осуществления настоящего изобретения.
В отношении всех чертежей, следует отметить, что аналогичные ссылочные позиции используются для указания одинаковых или аналогичных элементов, признаков и структур.
Осуществление изобретения
Нижеследующее описание, приведенное со ссылкой на прилагаемые чертежи, призвано обеспечить полное понимание различных вариантов осуществления настоящего изобретения, заданных формулой изобретения и ее эквивалентами. Оно включает в себя различные конкретные детали, обеспечивающие это понимание, но их следует рассматривать исключительно как иллюстративные. Соответственно, специалистам в данной области техники очевидно, что различные изменения и модификации различных описанных здесь вариантов осуществления можно предложить, не выходя за рамки объема и сущности настоящего изобретения. Кроме того, описания общеизвестных функций и конструкций могут быть опущены для наглядности и лаконичности.
Термины и слова, используемые в нижеследующем описании и формуле изобретения, не ограничиваются библиографическими значениями, но используются автором изобретения лишь для обеспечения отчетливого и согласованного понимания настоящего изобретения. Соответственно, специалистам в данной области техники очевидно, что нижеследующее описание различных вариантов осуществления настоящего изобретения обеспечено исключительно с целью иллюстрации, но не с целью ограничения настоящего изобретения, которое задано нижеследующей формулой изобретения и ее эквивалентов.
Следует понимать, что употребление единственного числа включают в себя ссылки на множественные экземпляры, если из контекста явно не следует обратное. Таким образом, например, ссылка на “поверхность компонента” включает в себя ссылку на одну или более из таких поверхностей.
На Фиг. 1 показана блок-схема конфигурации гибкого устройства отображения согласно варианту осуществления настоящего изобретения.
Согласно фиг. 1, гибкое устройство 100 отображения может включать в себя дисплей 110, датчик 120, средство 130 обеспечения обратной связи и контроллер 140.
Дисплей 110 включает в себя экран. Гибкое устройство 100 отображения, включающее в себя дисплей 110, может изгибаться до пороговой степени при нормальном использовании без разрушения. Соответственно, дисплей 110 может формироваться в гибкой конструкции и может быть выполнен из гибких материалов. Конструкция дисплея 110 будет подробно описана ниже.
Датчик 120 обнаруживает изгиб гибкого устройства 100 отображения (или дисплея 110). Датчик изгиба для обнаружения изгиба может быть выполнен с возможностью обнаружения изгиба гибкого устройства 100 отображения в некоторых или всех направлениях и может распознавать положение области изгиба, радиус изгиба, угол изгиба и т.д. и передавать информацию на контроллер 140.
Средство 130 обеспечения обратной связи обеспечивает обратную связь по изгибу.
В частности, средство 130 обеспечения обратной связи обеспечивает обратную связь, например, звуковую, по изменению экрана или тактильную. Обратная связь может быть обратной связью с предупреждением для информирования пользователя о том, что гибкое устройство 100 отображения испытывает механическое напряжение вследствие изгиба.
В частности, предполагается, что, когда степень изгиба, обнаруженного датчиком 120 под управлением контроллера 140 превышает заданное пороговое значение, обеспечивается звук обратной связи. Кроме того, соответствующий звук обратной связи может обеспечиваться согласно степени изгиба. Например, звук обратной связи может обеспечиваться как звук зуммера или как предписывающее или предупреждающее сообщение, например, «не изгибать» и «При дальнейшем изгибе гибкое устройство 100 отображения может быть повреждено». Характеристики звука обратной связи, например, тон, громкость или другое произнесенное предупреждающее сообщение, можно определять согласно степени изгиба.
Кроме того, предположим, что когда степень изгиба превышает пороговое значение, обеспечивается экранная обратная связь. Кроме того, форма отображения экрана может изменяться согласно степени изгиба. Например, экранная обратная связь может обеспечиваться включением или отключением экрана, изменением цвета части или всего экрана, затуханием экрана или сменной экрана на черный. Альтернативно, визуальная обратная связь может обеспечиваться в форме графического сообщения, например, «не изгибать» и «При дальнейшем изгибе гибкое устройство 100 отображения может быть повреждено». Характеристики экрана визуальная обратная связь можно определять согласно степени изгиба.
Кроме того, предположим, что когда степень изгиба превышает пороговое значение, обеспечивается тактильная обратная связь. Кроме того, вибрация может формироваться согласно степени изгиба. Например, тактильная обратная связь может обеспечиваться путем изменения интенсивности вибрации согласно степени изгиба или изменения области формирования вибрации. Характеристики тактильной обратной связи можно определять согласно степени изгиба.
Кроме того, можно также обеспечивать одновременно двух или более из звуковой обратной связи, экранной обратной связи и тактильной обратной связи.
Кроме того, пороговое значение, которое является стандартной для обеспечения обратной связи, можно задавать по умолчанию при изготовлении гибкого устройства 100 отображения, или может задаваться пользователем. Кроме того, тип обратной связи можно задавать по умолчанию при изготовлении гибкого устройства 100 отображения, или может изменяться пользователем.
Контроллер 140 управляет средством 130 обеспечения обратной связи для обеспечения типа обратной связи согласно степени изгиба, обнаруженной датчиком 120. Например, согласно степени изгиба предупреждающий звуковой сигнал может быть громче, интервал предупреждающего звукового сигнала может быть уже, или цвет экрана может быть темнее. В этом случае, обратная связь может обеспечиваться с момента времени, когда изгиб начинается, или с момента времени, когда степень изгиба превышает пороговое значение.
Кроме того, контроллер 140 управляет средством 130 обеспечения обратной связи для обеспечения соответствующей обратной связи, когда обнаруженная степень изгиба, датчиком 120, превышает пороговое значение. Например, согласно степени изгиба, интервал предупреждающего звукового сигнала может быть уже, и когда степень изгиба превышает пороговое значение, может обеспечиваться непрерывный предупреждающий звуковой сигнал. Таким образом, интервал предупреждающего звукового сигнала может сужаться в порядке «зуммер~~~зуммер~~~зуммер~~~зуммер» ? «зуммер~~зуммер~~зуммер~~» ? «зуммер~зуммер~зуммер~» ? «зуммер зуммер зуммер зуммер…», и затем, когда степень изгиба превышает пороговое значение, выводится предупреждающий звуковой сигнал «длинный зуммер». Таким образом, скорость предупреждающего звукового сигнала может увеличиваться, пока он не будет излучается постоянно. Обратную связь также можно регулировать другими способами; например, тон (частота) и/или громкость (уровень громкости) предупреждающего звукового сигнала может увеличиваться согласно степени изгиба, вплоть до максимальной.
В частности, контроллер 140 может обеспечивать соответствующую обратную связь, когда состояние изгиба, обнаруженное датчиком 120, например, угол изгиба или радиус изгиба, превышает пороговый угол изгиба или пороговый радиус изгиба. Радиус изгиба можно определить как радиус кривизны “R” путем изгиба. Угол изгиба можно определить как угол между заданной опорной плоскостью и конкретной областью гибкого устройства 100 отображения согласно состоянию изгиба.
Кроме того, контроллер 140 может обеспечивать различную обратную связь согласно количеству изгибных манипуляций, имеющих степень изгиба, которая превышает пороговое значение. Не требуется, чтобы пороговое значение было значением, при котором гибкий дисплей будет поврежден. Например, когда количество изгибных манипуляций в одной и той же области гибкого дисплея превышает пороговое количество, может обеспечиваться соответствующая обратная связь. В этом случае, когда направления изгиба изгибных манипуляций, происходящих в одной и той же области, отличаются, контроллер 140 может различать отсчеты изгибных манипуляций согласно направлениям изгиба. Кроме того, пороговое количество изгибных манипуляций можно определять согласно направлению изгиба. Таким образом, гибкий дисплей может повреждаться после ряда изгибов в одном направлении, с большей вероятностью, чем в другом направлении.
Кроме того, контроллер 140 может обеспечивать обратную связь в положение, соответствующее области изгиба, согласно области изгиба, где происходит изгиб, которое превышает пороговое значение. Например, когда верхняя левая краевая область гибкого устройства 100 отображения изгибается сверх порогового значения, обратная связь может обеспечиваться в положение, соответствующее верхней левой краевой области. Положение, соответствующее верхней левой краевой области, может быть различными положениями в диапазоне, где пользователь может распознавать верхнюю левую краевую область, например по меньшей мере одна из передней и задней поверхностей верхней левой краевой области, в пределах заданного расстояния верхней левой краевой области, и в пределах заданного расстояния линии изгиба верхней левой краевой области. Таким образом, обратная связь может указывать не только, превышает ли изгиб пороговую величину, но также может указывать, где изгиб превышает пороговую величину.
Кроме того, контроллер 140 может обеспечивать различную обратную связь согласно количеству повторяющихся изгибных манипуляций, когда изгиб сверх порогового значения повторно происходит в конкретной области.
В частности, контроллер 140 может обеспечивать более сильную обратную связь, когда количество изгибных манипуляций, превышающих пороговое значение, возрастает. Например, когда первый изгиб происходит сверх порогового значения, контроллер 140 может обеспечивать слабую тактильную обратную связь; когда второй изгиб происходит сверх порогового значения, контроллер 140 может обеспечивать промежуточную тактильную обратную связь; и когда третий изгиб происходит сверх порогового значения, контроллер 140 может обеспечивать сильную тактильную обратную связь.
Альтернативно, контроллер 140 может обеспечивать больше типов обратной связи, когда количество изгибных манипуляций, превышающих пороговое значение, возрастает. Например, когда первый изгиб происходит сверх порогового значения, контроллер 140 может обеспечивать визуальную экранную обратную связь; когда второй изгиб происходит сверх порогового значения, контроллер 140 может обеспечивать экранную обратную связь и звуковую обратную связь; и когда третий изгиб происходит сверх порогового значения, контроллер 140 может совместно обеспечивать экранную обратную связь, звуковую обратную связь и тактильную обратную связь.
Кроме того, контроллер 140 может обеспечивать обратную связь согласно времени изгибной манипуляции для поддержания изгиба, превышающего пороговое значение. Например, контроллер 140 может обеспечивать обратную связь, когда время изгибной манипуляции ниже порогового времени, и другую обратную связь, когда время изгибной манипуляции больше или равно пороговому времени.
Кроме того, контроллер 140 может делить степень изгиба, которая превышает пороговое значение, на множество уровней и обеспечивать обратную связь согласно каждому уровню. Степень изгиба может быть степенью в пороговом диапазоне от линии изгиба и может определяться радиусом изгиба или углом изгиба. Линия изгиба определяется как линия, которая соединяет точки, имеющие наивысшую степень изгиба на области изгиба. Например, линия, которая соединяет точки изгиба (или координаты изгиба), имеющие максимальное значение сопротивления, выводимое датчиком изгиба, может становиться линией изгиба. В порядке другого примера, степень изгиба сверх порогового значения может делиться на первый уровень, который соответствует нагрузке на гибкое устройство 100 отображения, второй уровень, который соответствует опасности повреждения, и третий уровень, когда гибкий дисплей находится на грани повреждения. Согласно уровням, может обеспечиваться разные звуки или разные голосовые сообщения, может обеспечиваться тактильная обратная связь, имеющая разные интервалы вибрации или разную интенсивность вибрации, или может обеспечиваться различная экранная предупреждающая индикация.
Кроме того, контроллер 140 может обеспечивать обратную связь согласно времени для поддержания изгиба, которое превышает пороговое значение. Например, соответствующая обратная связь может обеспечиваться только когда изгиб, который превышает пороговое значение, осуществляется сверх пороговой величины времени. Кроме того, даже когда изгиб, который превышает пороговое значение, осуществляется сверх пороговой величины времени, обратная связь может обеспечиваться согласно истекшему времени.
Кроме того, контроллер 140 может обеспечивать обратную связь согласно функции, активированной гибким устройством 100 отображения, когда происходит изгиб сверх порогового значения. Например, когда гибкое устройство 100 отображения отображает видео и выводит соответствующий звук, тактильная обратная связь или экранная обратная связь может обеспечиваться таким образом, что пользователь может легко распознавать обратную связь. Обратная связь, таким образом, может динамически определяться в соответствии с обстоятельствами, когда обеспечивается обратная связь.
Кроме того, контроллер 140 может храниться информация, связанная с изгибом, в хранилище (не показано), когда степень изгиба, обнаруженная датчиком 120, превышает пороговое значение. В частности, контроллер 140 может сохранять в хранилище информацию, касающуюся области изгиба, времени изгиба, степени изгиба и количества изгибных манипуляций.
Кроме того, контроллер 140 может управлять блоком связи (не показан) для передачи информации, связанной с изгибом, на внешний сервер (не показан). Соответственно, сервер может хранить и управлять информацией, связанной с изгибом гибкого устройства 100 отображения, и обеспечивать различные услуги в соответствии с обстоятельствами. Например, менеджер обслуживания клиентов может сообщать гибкому устройству 100 отображения информацию, касающуюся замены компонентов, и информацию, которая позволяет пользователю лично восстанавливать гибкое устройство 100 отображения после отказа на основании сохраненной информации. Соответственно, пользователю не нужно идти в центр обслуживания клиентов для ремонта. Кроме того, сервер может использоваться для обновления гибкого устройства 100 отображения на основании соответствующей информации. Кроме того, сервер может обеспечивать различные услуги на основании соответствующей информации.
Пороговое значение можно задавать согласно области гибкого устройства 100 отображения. Например, если гибкое устройство 100 отображения может складываться пополам и оставаться в сложенном состоянии, пороговое значение складываемой центральной области можно задавать высоким, и пороговое значение оставшейся области можно задавать более низким, чем пороговое значение для центральной области.
Кроме того, при наличии жесткой области на гибком устройстве 100 отображения, пороговое значение жесткой области можно задавать более низким, чем для других областей.
Кроме того, пороговое значение области, включающей в себя батарею или микросхему, можно задавать более низким, чем для других областей.
Кроме того, разные пороговые значения можно задавать для горизонтальных линий и вертикальных линий гибкого устройства 100 отображения.
Кроме того, если одно и то же пороговое значение задано для всей области гибкого устройства 100 отображения, пороговое значение можно задавать на основании порогового значения области, имеющей наименьшую гибкость.
Кроме того, пороговое значение гибкого устройства 100 отображения может быть переменным. Например, когда количество изгибных манипуляций, полученное обнаружением количества изгибающих манипуляций для конкретной области гибкого устройства 100 отображения, превышает пороговое количество, пороговое значение конкретной области может увеличиваться. В этом случае, гибкое устройство 100 отображения может сообщать пользователю изменения пороговое значение посредством графического пользовательского интерфейса (ГИП) или голосового сообщения.
Кроме того, контроллер 140 может обеспечивать обратную связь одновременно на множество областей, когда разные области одновременно изгибаются сверх пороговых значений. Например, когда первая область изгибается сверх порогового значения, обратная связь в виде предупреждающего звукового сигнала может обеспечиваться в первую область, и в то же время, когда вторая область изгибается сверх порогового значения, тактильная обратная связь может обеспечиваться во вторую область. Можно также выводить обратную связь разных типов в виде предупреждающих звуковых сигналов одновременно в несколько областей. Соответственно, благодаря наличию нескольких типов предупреждающих звуковых сигналов, пользователь может распознавать, что множество областей изгибается сверх пороговых значений.
Кроме того, если конкретная область чрезмерно изгибается, и, таким образом, функциональный модуль, смонтированный в конкретной области или в соседней области, не может действовать обычным образом, контроллер 140 может обеспечивать предупреждающее сообщение, когда пользователь пытается использовать функциональный модуль. Например, если гибкое устройство 100 отображения изгибается, и, таким образом, модуль камеры скрывается и, таким образом, не может действовать обычным образом, контроллер 140 может обеспечивать предупреждающее сообщение, когда пользователь пытается использовать модуль камеры.
В этом случае, можно предварительно сохранять информацию, сообщающую о невозможности обычным образом эксплуатировать конкретный модуль согласно степени изгиба конкретной области. Однако можно также обнаруживать соответствующую ситуацию за счет снабжения конкретного модуля датчиком.
Кроме того, если конкретная область чрезмерно изгибается сверх порогового значения, и, таким образом, соседняя область не может действовать обычным образом, контроллер 140 может позволять отключать соответствующий модуль, когда пользователь пытается использовать соответствующий модуль.
Например, когда датчик близости может распознавать контакт с лицом или ухом пользователя, касание можно деактивировать путем отключения экрана жидкокристаллического дисплея (ЖКД) или датчика прикосновения. Однако, когда гибкое устройство 100 отображения чрезмерно изгибается, датчик близости может ошибочно распознавать участок чрезмерно изогнутого гибкого устройства 100 отображения как лицо или ухо и, таким образом, может срабатывать неправильно, даже в отсутствие фактического контакта с лицом или ухом. Соответственно, когда гибкое устройство 100 отображения чрезмерно изгибается во время телефонного разговора и закрывает датчик близости, контроллер 140 может распознавать чрезмерно изогнутое состояние, позволять датчику близости отключаться и игнорировать ввод в датчик близости.
Кроме того, в нормальном состоянии, когда датчик освещения обнаруживает освещенность комнаты, яркость экрана регулируется согласно освещенности комнаты. Однако, когда датчик освещения закрыт, контроллер 140 может игнорировать ввод в датчик близости.
Кроме того, когда конкретная область чрезмерно изгибается, и, таким образом, прогнозируется вторичное повреждение, а также повреждение изгибом, контроллер 140 может позволять соответствующей части отключаться. Например, когда гибкое устройство 100 отображения изгибается, и существует опасность того, что положительный (+) электрод и отрицательный (-) электрод могут вступать в контакт друг с другом, контроллер 140 может позволять электрическому току не течь через соответствующую область.
Кроме того, когда гибкое устройство отображения включает в себя множество отображающих поверхностей, контроллер 140 может обеспечивать обратную связь к соответствующей поверхности. Например, если множество физических дисплеев 110 формирует экран дисплея, контроллер 140 может обеспечивать соответствующую обратную связь только к конкретному дисплею 110 при определении, что конкретный дисплей 110 чрезмерно изгибается.
В вышеупомянутых вариантах осуществления общий изгиб описан в порядке примера, но специалистам в данной области техники должно быть очевидно, что обратная связь с предупреждением может обеспечиваться таким же образом даже в случае скатывания или складывания гибкого устройства 100 отображения. Например, в случае скатывания, пороговое значение скатывания можно задавать в пределах механического напряжения гибкого устройства 100 отображения, и когда гибкое устройство 100 отображения скатывается сверх порогового значения скатывания, может обеспечиваться обратная связь с предупреждением.
В другом варианте осуществления настоящего изобретения, гибкое устройство 100 отображения может включать в себя дисплей и элемент.
Как показано на фиг. 17, элемент 17 располагается на области дисплея, где располагается заданный внутренний элемент 17, и может иметь пороговый коэффициент предельного напряжения. Механическое напряжение указывает силу объекта, которой сохраняет первоначальную форму при внешнем давлении.
В этом случае, когда область, где располагается элемент 17, изгибается сверх коэффициента предельного напряжения, элемент 17 будет разрушаться.
В частности, элемент 17 располагается в изгибаемой области гибкого устройства 100 отображения и изгибается пропорционально степени изгиба. Элемент 17 может быть смонтирован так, чтобы разрушаться, когда гибкое устройство 100 отображения изгибается сверх пороговой кривизны.
Элемент 17 можно реализовать, например, в форме бруска. Когда гибкое устройство 100 отображения изгибается сверх пороговой кривизны, как описано выше, элемент 17 будет разрушаться. Соответственно, когда гибкое устройство 100 отображения не может функционировать надлежащим образом в будущем, элемент 17 может обеспечивать информацию, помогающую определить, может ли проблема быть обусловлена чрезмерным изгибом.
На Фиг. 2 показана базовая конфигурация дисплея гибкого устройства отображения согласно варианту осуществления настоящего изобретения.
Согласно фиг. 2, дисплей 110 может включать в себя подложку 111, схему 112 возбуждения, отображающую панель 113 и защитный слой 114.
Подложку 111 можно реализовать в виде пластмассовой подложки (например, полимерной пленки).
Пластмассовая подложка имеет конструкцию, включающую в себя барьерное покрытие обработки на обеих сторонах пленки основы. Пленку основы можно реализовать в виде смолы, например, полиимида (PI), поликарбоната (ПК), полиэтилентерефталата (ПЭТ), полиэфирсульфона (PES), полиэтилентерефталата (PEN), волокнита (FRP) и т.п. Барьерное покрытие осуществляется на противоположных сторонах пленки основы и может использовать органическую пленку или неорганическую пленку для поддержания гибкости.
Подложка 111 может включать в себя материал, имеющий гибкость, например, тонкое стекло и металлическую фольгу, а также пластмассовую подложку.
Схема 112 возбуждения возбуждает отображающую панель 113. В частности, схема 112 возбуждения подает напряжение возбуждения на множество пикселей, которые составляют отображающую панель 113, и может быть реализована в виде тонкопленочного транзистора (TFT), TFT из низкотемпературного поликремния, органических TFT и т.п. Схему 112 возбуждения можно реализовать в различных формах согласно форме реализации отображающей панели 113. Например, отображающая панель 113 может включать в себя органическое светящееся тело, которое включает в себя множество пиксельных ячеек, и электродный слой, который покрывает обе стороны органического светящегося тела. В этом случае, схема 112 возбуждения может включать в себя множество транзисторов, соответствующих пиксельным ячейкам отображающей панели 113. Контроллер 140 подает электрический сигнал на затвор каждого транзистора таким образом, чтобы пиксельная ячейка, которая подключена к транзистору, могла излучать свет. В результате, может отображаться изображение.
Альтернативно, отображающую панель 113 можно реализовать посредством электролюминесценции (e1), электрофоретического дисплея (EPD), электрохромного дисплея (ECD), жидкокристаллического дисплея, жидкокристаллического дисплея с активной матрицей (AMLCD), плазменной отображающей панели (PDP), и т.п. вместо органического светодиода (ОСИД). Однако, поскольку ЖКД не может самостоятельно излучать свет, в ЖКД требуется задняя подсветка. В случае ЖКД, которому не нужна задняя подсветка, используется окружающий свет. Соответственно, для использования ЖК отображающей панели 113 без задней подсветки, должно выполняться условие, например, наружная среда должна иметь большое количество света.
Защитный слой 114 защищает отображающую панель 113. Например, защитный слой 114 может включать в себя такое вещество, как ZrO, CeO2, ThO2 и т.п. Защитный слой 114 может формироваться в виде прозрачной пленки для покрытия всей поверхности отображающей панели 113.
Как показано на фиг. 2, дисплей 110 можно реализовать в виде электронной бумаги (электронной бумаги). Электронная бумага представляет собой дисплей для нанесения признаков обычных чернил на бумагу. В отличие от плоскопанельных дисплеев, относящихся к уровню техники, электронная бумага отражает свет. Кроме того, электронная бумага может изменять изображение или букву с использованием электрофорез с использованием шара кручения или капсулы.
Если дисплей 110 состоит из прозрачных компонентов, можно реализовать гибкое и прозрачное устройство отображения. Например, если подложка 111 выполнена из полимерного вещества, например, прозрачной пластмассы, если схема 112 возбуждения реализована в виде прозрачного транзистора, и если отображающая панель 113 реализована в виде прозрачного органического светоизлучающего слоя и прозрачного электрода, гибкое устройство 100 отображения может становиться прозрачным.
Прозрачный транзистор представляет собой транзистор, который изготавливается путем замены непрозрачного кремния TFT, относящегося к уровню техники, прозрачным веществом, например, оксидом цинка или оксидом титана. Кроме того, прозрачный электрод может быть выполнен из такого материала, как оксид индия-олова (ITO) или графен. Графен имеет плоскостную структуру ячеистой решетки, состоящей из атомов углерода, и обладает прозрачностью. Кроме того, слой прозрачных органических светоизлучающих ОСИД можно реализовать в виде различных веществ.
На Фиг. 3A, 3B и 3C показано размещение датчиков изгиба согласно варианту осуществления настоящего изобретения.
На фиг. 3A, датчики изгиба смонтированы на передней стороне дисплея 110, но это всего лишь пример. Датчики изгиба могут быть смонтированы на задней стороне дисплея 110 или на обеих сторонах дисплея 110. Кроме того, форма, количество и положение датчиков изгиба может изменяться. Например, в дисплее 110 может быть единственный датчик изгиба, или несколько датчиков изгиба могут быть соединены друг с другом. В данном случае, единственный датчик изгиба может обнаруживать единичные данные изгиба, или может иметь множество каналов обнаружения для обнаружения множества данных изгиба.
На фиг. 3A множество полосовых датчиков изгиба располагаются вертикально и горизонтально, таким образом, имея структуру решетки.
Как показано на фиг. 3A, датчики 21-1 - 21-5 изгиба располагаются в первом направлении, и датчики 22-1 - 22-5 изгиба располагаются во втором направлении. Датчики изгиба могут быть разнесены друг от друга с регулярными интервалами.
На фиг. 3A пять датчиков 21-1 - 21-5 изгиба и пять датчиков 22-1 - 22-5 изгиба располагаются вертикально и горизонтально, соответственно, но это всего лишь пример. Можно изменять количество датчиков изгиба согласно размеру гибкого устройства 100 отображения и т.п. Для обнаружения изгиба, который может происходить на всей области гибкого устройства 100 отображения, датчики изгиба, показанные на фиг. 3A, располагаются вертикально и горизонтально. Соответственно, если гибким является только участок гибкого дисплея 110 или если только участок гибкого устройства 100 отображения нуждается в обнаружении изгиба, датчики изгиба могут располагаться только на соответствующих участках.
Каждый датчик изгиба можно реализовать в виде датчика электрического сопротивления, который использует электрическое сопротивление, или микрооптоволоконного датчика, который использует деформацию оптического волокна. Для удобства описания, в этом варианте осуществления датчики изгиба являются датчиками электрического сопротивления.
В частности, когда центральная область, которая располагается в центре на основании правого и левого краев гибкого устройства 100 отображения изгибается вниз, как показано на фиг. 3B, натяжение прилагается к горизонтально расположенным датчикам 21-1 - 21-5 изгиба путем изгиба. Соответственно, значение сопротивления каждого из горизонтально расположенных датчиков 21-1 - 21-5 изгиба изменяется. Датчик 120 может обнаруживать изменение выходных значений, выводимых из датчиков 21-1 - 21-5 изгиба, и обнаруживать, что гибкое устройство 100 отображения горизонтально изгибается на основании центра поверхности дисплея 110. На фиг. 3B, центральная область изгибается вниз (далее именуется здесь направлением Z-) относительно поверхности дисплея 110. Однако, даже когда центральная область изгибается вверх (далее именуется здесь направлением Z+) относительно поверхности дисплея 110, датчик 120 может обнаруживать изгиб на основании изменения выходных значений горизонтальных датчиков 21-1 - 21-5 изгиба.
Кроме того, когда центральная область, которая располагается в центре на основании верхнего и нижнего краев гибкого устройства 100 отображения изгибается вверх, как показано на фиг. 3C, натяжение прилагается к вертикально расположенным датчикам 22-1 - 22-5 изгиба. Датчик 120 может обнаруживать, что гибкое устройство 100 отображения вертикально изгибается, на основании изменения выходных значений, выводимых из вертикально расположенных датчиков 22-1 - 22-5 изгиба. На фиг. 3C показан изгиб в направлении Z+. Кроме того, можно также обнаруживать изгибы в направлении Z- с использованием вертикально расположенных датчиков 22-1 - 22-5 изгиба.
Когда гибкий дисплей 110 диагонально изгибается, натяжение применяется всем горизонтальным и вертикальным датчикам изгиба. Соответственно, диагональный изгиб может обнаруживаться на основании выходных значений горизонтального и вертикального датчиков изгиба.
На Фиг. 4A и 4B показано размещение датчиков изгиба согласно другому варианту осуществления настоящего изобретения.
На Фиг. 4A показан пример структуры обнаружения изгиба с использованием одного датчика 71 изгиба, который располагается на одной стороне дисплея 110. Как показано на фиг. 4A, датчик 71 изгиба может формироваться в виде замкнутой кривой, например, окружности, четырехугольника или другого многоугольника, и может располагаться вдоль краев дисплея 110. Гибкое устройство 100 отображения может определять, что участок, имеющий изменение в выходном значении на замкнутой кривой, является областью изгиба.
На Фиг. 4B показан вариант осуществления, в котором два датчика 71 и 72 изгиба располагаются поперечно друг другу. Как показано на фиг. 4B, первый датчик 71 изгиба может обеспечиваться на первой стороне дисплея 110, и второй датчик 72 изгиба может обеспечиваться на второй стороне дисплея 110. Первый датчик 71 изгиба может располагаться на первой стороне в первом диагональном направлении, и второй датчик 72 изгиба может располагаться на второй стороне во втором диагональном направлении. Соответственно, поскольку выходные значения и выходные участки первого и второго датчиков 71 и 72 изгиба изменяются согласно различным условиям изгиба, например, когда изгибается каждый угол, когда изгибается каждый край, когда изгибается центр и когда происходит складывание или скатывание, гибкое устройство 100 отображения может определять тип происходящего изгиба на основании признаков выходных значений.
Здесь подробно описан способ обнаружения изменения форм обычного изгиба, складывания и скатывания с использованием датчиков изгиба.
На Фиг. 5A, 5B и 5C показан способ обнаружения изгиба гибкого устройства 100 отображения с использованием датчиков изгиба согласно варианту осуществления настоящего изобретения.
Прежде всего, на фиг. 5A показан вид в разрезе изогнутого гибкого устройства 100 отображения.
Когда гибкий дисплей 110 изгибается, датчики изгиба, которые обеспечены на одной стороне или обеих сторонах гибкого дисплея 110, изгибаются соответственно и приобретают значения сопротивления, соответствующие интенсивности приложенного натяжения, и, таким образом, выводят соответствующие выходные значения.
Например, когда гибкий дисплей 110 изгибается, как показано на фиг. 5A, датчик 41-1 изгиба, обеспеченный на задней стороне гибкого дисплея 110, изгибается и выводит значение сопротивления, соответствующее интенсивности приложенного натяжения.
В этом случае интенсивность натяжения возрастает пропорционально степени изгиба. Например, когда гибкий дисплей 110 изгибается, как показано на фиг. 5A, степень изгиба центральной области является наивысшей. Соответственно, наивысшее натяжение прилагается к датчику 41-1 изгиба в центральной точке a3, и, таким образом, датчик 41-1 изгиба имеет наивысшее значение сопротивления. Напротив, с увеличением расстояния от центральной точки a3, степень изгиба уменьшается. Степень изгиба будет ниже в точках a2 и a4, чем в точке a3, и будет ниже в точках a1 и a5, чем в точках a2 и a4. Соответственно, с уменьшением расстояния от центральной точки a3 до точек a2 и a1 или до точек a4 и a5, значение сопротивления снижается.
Если значение сопротивления, выводимое из датчика изгиба, является наивысшим в конкретной точке и постепенно снижается в противоположных направлениях, датчик 120 может определять, что область, имеющая наивысшее значение сопротивления, является областью наибольшего изгиба. Кроме того, датчик 120 может определять, что область, имеющая неизменное значение сопротивления, является областью, которая не изгибается, и что область, имеющая значение сопротивления, которое изменилось сверх заданной степени, является областью изгиба.
На Фиг. 5B и 5C показан способ задания области изгиба согласно варианту осуществления настоящего изобретения. Поскольку фиг. 5B и 5C призваны демонстрировать, что гибкое устройство 100 отображения горизонтально изгибается относительно передней стороны, вертикально расположенные датчики изгиба не показаны для удобства описания. Вертикально расположенные датчики изгиба, если присутствуют, не будут изгибаться в описанном примере. Кроме того, для удобства описания, датчики изгиба обозначаются по-разному на разных чертежах. На практике, датчики изгиба, имеющие конструкцию, показанную на фиг. 3A, можно использовать таким же образом.
Область изгиба представляет собой область, которая изгибается гибким дисплеем 110. Когда гибкий дисплей 110 изгибается, датчики 41-1 - 41-5 изгиба также изгибаются. Соответственно, область изгиба можно определить как все точки, где располагаются датчики 41-1 - 41-5 изгиба, выходные значения сопротивления которых отличаются от первоначального состояния.
Датчик 120 может обнаруживать размер линии изгиба, направление линии изгиба, положение линии изгиба, количество линий изгиба, количество изгибных манипуляций, скорость изменения изгиба, размер области изгиба, положение области изгиба, количество областей изгиба, и пр. на основании соотношений между точками, отличающихся своими значениями сопротивления.
В частности, когда расстояние между точками, отличающихся своими значениями сопротивления, находится в пределах порогового расстояния, точки обнаруживаются как одна область изгиба. Однако если среди точек, отличающихся своими значениями сопротивления, имеются точки, находящиеся на расстоянии, превышающем пороговое расстояние, точки могут делиться на разные области изгиба на основании точек, находящихся на расстоянии, превышающем пороговое расстояние. Более подробное описание приведено со ссылкой на фиг. 5B и 5C.
На Фиг. 5B показан способ обнаружения единственной области изгиба. Когда гибкий дисплей 110 изгибается, как показано на фиг. 5B, точки a1-a5 датчика 41-1 изгиба, точки b1-b5 датчика 41-2 изгиба, точки c1-c5 датчика 41-3 изгиба, точки d1-d5 датчика 41-4 изгиба и точки e1-e5 датчика 41-5 изгиба имеют другие значения сопротивления, чем в первоначальном состоянии.
В этом случае, точки, которые обнаруживают изменение значения сопротивления на датчиках 41-1 - 41-5 изгиба располагаются непрерывно в пределах порогового расстояния друг от друга.
Соответственно, датчик 120 обнаруживает область 42, включающую в себя точки a1-a5 датчика 41-1 изгиба, точки b1-b5 датчика 41-2 изгиба, точки c1-c5 датчика 41-3 изгиба, точки d1-d5 датчика 41-4 изгиба и точки e1-e5 датчика 41-5 изгиба, как единственную область изгиба. Средняя линия 43 обнаруживается как имеющая наибольшее изменение сопротивления, и изгиб определяется как наибольший на средней линии 43.
На Фиг. 5C показан способ обнаружения множества областей изгиба. Когда гибкий дисплей 110 изгибается, как показано на фиг. 5C, точки a1-a2 и a4-a5 датчика 41-1 изгиба, точки b1-b2 и b4-b5 датчика 41-2 изгиба, точки c1-c2 и c4-c5 датчика 41-3 изгиба, точки d1-d2 и d4-d5 датчика 41-4 изгиба и точки e1-e2 и e4-e5 датчика 41-5 изгиба имеют другие значения сопротивления, чем в первоначальном состоянии. Точки a3, b3, c3, d3 и e3 обнаруживаются как имеющие такое же значение сопротивления, как в первоначальном состоянии, и определяются как точки без изгиба.
В датчике 41-1 изгиба, точки a1-a2 и точки a4-a5 являются непрерывными, но точки a2-a4 не являются непрерывными вследствие точки a3. Соответственно, если предполагается, что расстояние между точкой a2 и точкой a4 превышает заданное расстояние, точки a1-a2 и точки a4-a5 можно отличать как разные области изгиба. Кроме того, точки других датчиков 41-2 - 41-5 изгиба можно отличать таким же образом.
Соответственно, гибкое устройство 100 отображения может задавать область 44, включающую в себя точки a1-a2 датчика 41-1 изгиба, точки b1-b2 датчика 41-2 изгиба, точки c1-c2 датчика 41-3 изгиба, точки d1-d2 датчика 41-4 изгиба и точки e1-e2 датчика 41-5 изгиба, как единственную область изгиба, и также может задавать другую область 45, включающую в себя точки a4-a5 датчика 41-1 изгиба, точки b4-b5 датчика 41-2 изгиба, точки c4-c5 датчика 41-3 изгиба, точки d4-d5 датчика 41-4 изгиба и точки e4-e5 датчика 41-5 изгиба, как другую единственную область изгиба.
Область изгиба может включать в себя линию изгиба. Линию изгиба можно определить как линию, которая соединяет точки, которые обнаруживают наивысшие значения сопротивления в области изгиба.
Например, в области 42 изгиба, показанной фиг. 5B, линия 43, которая соединяет точку a3, которая выводит наивысшее значение сопротивления на датчике 41-1 изгиба, точку b3, которая выводит наивысшее значение сопротивления на датчике 41-2 изгиба, точку c3, которая выводит наивысшее значение сопротивления на датчике 41-3 изгиба, точку d3, которая выводит наивысшее значение сопротивления на датчике 41-4 изгиба, и точку e3, которая выводит наивысшее значение сопротивления на датчике 41-5 изгиба, является линией изгиба. Согласно фиг. 5B, линия изгиба вертикально сформирована в центральной области дисплея 110.
Кроме того, в области 44 изгиба, показанной фиг. 5C, линия 46, которая соединяет точку a1, которая выводит наивысшее значение сопротивления на датчике 41-1 изгиба, точку b1, которая выводит наивысшее значение сопротивления на датчике 41-2 изгиба, точку c1, которая выводит наивысшее значение сопротивления на датчике 41-3 изгиба, точку d1, которая выводит наивысшее значение сопротивления на датчике 41-4 изгиба, и точку e1, которая выводит наивысшее значение сопротивления на датчике 41-5 изгиба, является линией изгиба. Кроме того, в области 45 изгиба, линия 47, которая соединяет точку a5, которая выводит наивысшее значение сопротивления на датчике 41-1 изгиба, точку b5, которая выводит наивысшее значение сопротивления на датчике 41-2 изгиба, точку c5, которая выводит наивысшее значение сопротивления на датчике 41-3 изгиба, точку d5, которая выводит наивысшее значение сопротивления на датчике 41-4 изгиба, и точку e5, которая выводит наивысшее значение сопротивления на датчике 41-5 изгиба, является другой линией изгиба. На фиг. 5C, две вертикальные линии изгиба сформированы в левой и правой краевых областях дисплея 110.
На Фиг. 6A и 6B показан пример способа обнаружения сложенного состояния гибкого устройства 100 отображения.
Прежде всего, на фиг. 6A показан вид в разрезе сложенного гибкого устройства 100 отображения.
Когда гибкий дисплей 110 складывается, датчики изгиба, обеспеченные на одной стороне или обеих сторонах гибкого дисплея 110, также складываются и имеют значения сопротивления, соответствующие интенсивности приложенного натяжения.
Например, когда правая краевая область гибкого дисплея 110 складывается к центру, как показано на фиг. 6A, датчик 51-1 изгиба, обеспеченный на задней стороне гибкого дисплея 110, также складывается и выводит значение сопротивления, соответствующее интенсивности приложенного натяжения.
Таким образом, в случае изгиба датчик 51-1 изгиба имеет наивысшее значение сопротивления в точке a3, имеющей наивысшее натяжение, и имеет постепенно уменьшающиеся значения сопротивления в противоположных направлениях. Другими словами, на датчике 51-1 изгиба, по мере последовательного приближения к точкам a2 и a1 или по мере последовательного приближения к точкам a4 и a5, от точки A3, значение сопротивления снижается ниже значения сопротивления точки a3.
Когда гибкий дисплей 110 изгибается сверх порогового угла изгиба, то есть по существу складывается, значение сопротивления точки соответствующий линии изгиба обнаруживается сверх порогового значения. Соответственно, гибкое устройство 100 отображения может определять, происходит ли складывание или обычный изгиб, согласно размеру значения сопротивления.
Кроме того, если гибкий дисплей 110 изгибается, и, таким образом, точки поверхности гибкого дисплея 110 могут контактировать друг с другом, гибкое устройство 100 отображения может определять складывание с учетом того, что поверхность гибкого дисплея 110 касается самой себя. Таким образом, когда правый край гибкого дисплея 110 изгибается в направлении Z+ и, таким образом, складывается к передней стороне, две области гибкого дисплея 110, которые разнесены друг от друга, могут вступать в контакт друг с другом. В этом случае, область передней стороны гибкого устройства 100 отображения обнаруживает касание и имеет большее изменение значения сопротивления, чем в обычном изгибе. Соответственно, когда гибкое устройство 100 отображения вычисляет расстояние между границей изогнутого края и линией изгиба и обнаруживает касание в точке, где расстояние вычислено далеко от линии изгиба в противоположном направлении, гибкое устройство 100 отображения может определять, что гибкий дисплей 110 сложен. На Фиг. 6B показан способ определения области складывания согласно варианту осуществления настоящего изобретения. Фиг. 6B призван демонстрировать, что гибкий дисплей 110 сложен горизонтально на основании передней стороны, и вертикально расположенные датчики изгиба не показаны для удобства описания.
Область складывания является областью, которая формируется складыванием гибкого дисплея 110. В случае изгиба область складывания можно определить как одну или более областей, включающих в себя все точки датчиков изгиба, где выходные значения сопротивления отличаются от первоначального состояния, когда датчики изгиба складываются. Способ задания и различения области складывания такой же, как для областей изгиба, и описание здесь не повторяется.
Согласно фиг. 6B, точки, которые выводят иные значения сопротивления, чем в первоначальном состоянии, то есть область 52, включающую в себя точки a1-a5 датчика 51-1 изгиба, точки b1-b5 датчика изгиба 51-2, точки c1-c5 датчика изгиба 51-3, точки d1-d5 датчика изгиба 51-4 и точки e1-e5 датчика 51-5 изгиба, можно определить как единственную область складывания.
Область складывания делится на два участка на основании линии складывания. Линия складывания это линия, которая соединяет точки, имеющие наивысшее значение сопротивления в области складывания. Линию складывания можно использовать в том же смысле, что и линию изгиба.
В области 52 складывания, показанной на фиг. 6B, вертикальная линия 53, которая соединяет точку a3, которая выводит наивысшее значение сопротивления на датчике 51-1 изгиба, точку b3, которая выводит наивысшее значение сопротивления на датчике изгиба 51-2, точку c3, которая выводит наивысшее значение сопротивления на датчике изгиба 51-3, точку d3, которая выводит наивысшее значение сопротивления на датчике изгиба 51-4, и точку e3, которая выводит наивысшее значение сопротивления на датчике 51-5 изгиба указывает линию складывания.
Когда обнаруживается складывание, гибкое устройство 100 отображения может осуществлять операцию, отличную от операции, когда происходит обычный изгиб. Например, в сложенной области может отображаться другой экран содержания.
Гибкий дисплей 110 можно скатывать, как бумагу, как описано выше. Гибкое устройство 100 отображения может определять, происходит ли скатывание, на основании результатов обнаружения датчика 120.
На Фиг. 7A, 7B и 7C показан способ обнаружения скатывания гибкого дисплея согласно варианту осуществления настоящего изобретения.
Прежде всего, на фиг. 7A показан вид в разрезе скатанного гибкого устройства 100 отображения.
Когда гибкий дисплей 110 скатывается, натяжение прилагается к датчикам изгиба, которые обеспечены на одной стороне или обеих сторонах гибкого дисплея 110.
В этом случае, интенсивность натяжения, прилагаемого к датчикам изгиба, аналогична в пороговом диапазоне. Соответственно, значения сопротивления, выводимые из датчиков изгиба, также становятся аналогичными в пороговом диапазоне.
Для скатывания, изгиб должен происходить в пределах пороговой кривизны. Кроме того, когда гибкий дисплей 110 скатывается, область изгиба становится шире, чем при обычном изгибе или складывании. Соответственно, когда гибкое устройство 100 отображения обнаруживает, что изгиб непрерывно происходит сверх порогового угла изгиба на области, которая шире, чем пороговая область, определяется, что гибкое устройство 100 отображения находится в скатанном состоянии. В скатанном состоянии, передняя сторона и задняя сторона гибкого дисплея 110, по существу, контактируют друг с другом. Например, когда край 60-1 гибкого дисплея 110 изгибается в направлении Z+ и, таким образом, скатывается внутрь дисплея 110, как показано на фиг. 7A, передняя сторона дисплея 110 контактирует с задней стороной, на которой обеспечен датчик 60-1 изгиба.
Соответственно, в другом варианте осуществления, гибкое устройство 100 отображения может определять, скатан ли гибкий дисплей 110, на основании того, контактируют ли друг с другом передняя сторона и задняя сторона гибкого дисплея 110. В этом случае, датчик 120 может включать в себя датчик прикосновения. Когда значения сопротивления, выводимые из датчика изгиба, аналогичны в пороговом диапазоне, и когда датчики прикосновения, обеспеченные на передней стороне и задней стороне гибкого устройства 100 отображения, обнаруживают касание, гибкое устройство 100 отображения определяет, что происходит скатывание. Кроме того, гибкое устройство 100 отображения может в качестве альтернативы определять изгиб гибкого дисплея 110 и контакт или приближение участков гибкого дисплея 110 с использованием магнитного датчика, датчика света или датчика близости вместо датчика прикосновения.
На Фиг. 7B и 7C показан способ задания области скатывания согласно варианту осуществления настоящего изобретения.
Область скатывания это полная скатанная область гибкого устройства 100 отображения. Область скатывания можно определить как одну или более областей, включающих в себя все точки датчиков изгиба, где выходные значения сопротивления отличаются от первоначального состояния, при обычном изгибе и складывании. Способ задания и различения области скатывания такой же, как для областей изгиба или области складывания, и его описание здесь не повторяется.
Когда гибкий дисплей 110 полностью скатан, как показано на фиг. 7B, по существу вся область 61 гибкого дисплея 110 становится областью скатывания. Когда гибкий дисплей 110 частично скатан, как показано на фиг. 7C, и когда точки, которые выводят иные значения сопротивления, чем в первоначальном состоянии разнесены больше, чем на пороговое расстояние, области 62 и 63 гибкого дисплея 110 становятся разными областями скатывания.
Как описано выше, гибкий дисплей 110 может изгибаться в различных формах и может обнаруживать форму изгиба на основании результатов обнаружения датчика 120. Кроме того, гибкое устройство 100 отображения может обнаруживать степень изгиба гибкого дисплея 110, то есть угол изгиба.
Хотя это не показано на чертежах, гибкое устройство 100 отображения может определять степень изгиба гибкого дисплея 110 с использованием изменений размеров значений сопротивления, выводимых из датчика изгиба с регулярными интервалами. В частности, гибкое устройство 100 отображения вычисляет разность между значением сопротивления точки, которая выводит наивысшее значение сопротивления на датчике изгиба, и значением сопротивления точки, которая удалена на пороговое расстояние от точки, имеющей наивысшее значение сопротивления.
Затем гибкое устройство 100 отображения может определять степень изгиба с использованием вычисленной разности значений сопротивления. В частности, гибкое устройство 100 отображения делит степень изгиба на множество уровней, согласует каждый уровень с заданным диапазоном значений сопротивления и сохраняет информацию.
Соответственно, гибкое устройство 100 отображения может определять степень изгиба на основании уровня, которому принадлежит вычисленная разность значений сопротивления, из множества уровней.
Гибкое устройство 100 отображения может осуществлять надлежащую операцию согласно степени изгиба. Например, при переключении каналов, если степень изгиба высока, скорость переключения каналов может увеличиваться, или диапазон переключения каналов может расширяться. Напротив, если степень изгиба низка, скорость переключения каналов может уменьшаться, или переключение каналов можно осуществлять в блоке меньшего количества каналов. Кроме того, при управлении объемом или изменении содержания, гибкое устройство 100 отображения может осуществлять разные операции согласно степени изгиба.
Как описано выше, направление изгиба гибкого устройства 100 отображения может изменяться, например, в направлении Z+ и в направлении Z-.
Направление изгиба может обнаруживаться различными способами. Например, два датчика изгиба могут быть уложены друг на друга, что позволяет определять направление изгиба на основании изменения размера значений сопротивления датчиков изгиба. Например, когда первый датчик изгиба имеет большее изменение сопротивления, чем второй датчик изгиба, уложенный друг на друга с первым датчиком изгиба, можно определить, что первый датчик изгиба находится в наружной части изгиба.
На Фиг. 8A, 8B, 8C и 8D показан способ обнаружения направления изгиба с использованием уложенных датчиков изгиба согласно варианту осуществления настоящего изобретения.
Для удобства описания на фиг. 8A-8C в порядке примера показан обычный изгиб. Однако нижеследующее описание можно также применять к складыванию и скатыванию.
Согласно фиг. 8A, два датчика 71 и 72 изгиба уложены друг на друга на одной стороне дисплея 110. В этом случае, когда происходит изгиб в одном направлении, значения сопротивления верхнего датчика 71 изгиба и нижнего датчика 72 изгиба в точке изгиба становятся разными. Соответственно, направление изгиба можно определять, сравнивая значения сопротивления двух датчиков 71 и 72 изгиба в одной и той же точке.
В частности, когда гибкий дисплей 110 изгибается в направлении Z+, как показано на фиг. 8B, нижний датчик 72 изгиба принимает большее натяжение, чем верхний датчик 71 изгиба в точке A, соответствующей линии изгиба.
Напротив, когда гибкий дисплей 110 изгибается в направлении задней стороны, как показано на фиг. 8C, верхний датчик 71 изгиба принимает большее натяжение, чем нижний датчик 72 изгиба.
Соответственно, гибкое устройство 100 отображения может обнаруживать направление изгиба, сравнивая значения сопротивления двух датчиков 71 и 72 изгиба в точке A.
На фиг. 8A-8C, два датчика 71 и 72 изгиба уложены друг на друга на одной стороне дисплея 110. Однако два датчика 71 и 72 изгиба альтернативно могут быть обеспечены на обеих сторонах дисплея 110 соответственно.
На Фиг. 8D показано, что два датчика 71 и 72 изгиба обеспечены на обеих сторонах дисплея 110 соответственно.
Соответственно, когда гибкий дисплей 110 изгибается в первом направлении (далее именуемом здесь направлением Z+) перпендикулярном экрану, датчик изгиба, который обеспечен на первой стороне дисплея 110, принимает силу сжатия, и датчик изгиба, который обеспечен на второй стороне дисплея 110, принимает натяжение. Напротив, когда гибкий дисплей 110 изгибается во втором направлении (далее именуемом здесь направлением Z-), противоположном первому направлению, датчик изгиба, который обеспечен на второй стороне дисплея 110, принимает силу сжатия, и датчик изгиба, который обеспечен на первой стороне дисплея 110, принимает натяжение. Поскольку значения, обнаруживаемые двумя датчиками изгиба, выводятся по-разному согласно направлению изгиба, как описано выше, гибкое устройство 100 отображения может определять направление изгиба на основании признаков обнаруживаемых значений.
Согласно фиг. 8A-8D направление изгиба обнаруживается с использованием двух датчиков 71 и 72 изгиба. Однако направление изгиба можно определять с использованием только тензодатчика (не показан), обеспеченного на одной стороне дисплея 110. Другими словами, поскольку тензодатчик, обеспеченный на одной стороне дисплея 110, принимает силу сжатия или силу растяжения согласно направлению изгиба, направление изгиба можно определять путем идентификации признаков выходного значения.
На Фиг. 9A и 9B показан способ обнаружения направления изгиба согласно другому варианту осуществления настоящего изобретения.
В вышеописанных вариантах осуществления используются датчики изгиба формы линии. Однако изгиб может обнаруживаться с использованием множества фрагментарных тензодатчиков.
На Фиг. 9A и 9B показано, что изгиб обнаруживается с использованием множества тензодатчиков. Тензодатчики обнаруживают изменения на поверхности объекта согласно изменениям значения сопротивления с использованием металла или полупроводника, сопротивление которого изменяется согласно интенсивности приложенной силы. В целом, когда материал, например, металл, удлиняется под действием внешней силы, значение сопротивления возрастает, и когда материал сокращается под действием внешней силы, значение сопротивления снижается. Соответственно, можно определять, происходит ли изгиб, путем обнаружения изменения значения сопротивления.
Согласно фиг. 9A множество тензодатчиков располагается на краевых областях дисплея 110. Количество тензодатчиков может изменяться согласно размеру, форме и заданного разрешения обнаружения изгиба дисплея 110.
Тензодатчики могут быть обеспечены на одной стороне или обеих сторонах дисплея 110. Если тензодатчики обеспечены на обеих сторонах, передней стороне и задней стороне, дисплея 110, тензодатчики на передней стороне могут обнаруживать изгиб дисплея 110, которой вогнуто изгибается в направлении передней стороны, то есть в направлении Z+, и тензодатчики на задней стороне могут обнаруживать изгиб дисплея 110, которой вогнуто изгибается в направлении задней стороны, то есть в направлении Z-.
Если тензодатчики обеспечены только на одной стороне, либо передней стороне, либо задней стороне, дисплея 110, тензодатчики могут обнаруживать изгиб дисплея 110, который изгибается в направлениях передней и задней стороны. Например, если тензодатчики внедрены в переднюю сторону дисплея 110, и дисплей 110 изгибается в направлении Z+, датчик 120 может обнаруживать, что линия, которая соединяет тензодатчик, выводящий наименьшее значение сопротивления, является линией изгиба. Кроме того, если тензодатчики внедрены в переднюю сторону дисплея 110, и дисплей 110 изгибается в направлении Z- (хотя это не показано на чертежах), датчик 120 может обнаруживать, что линия, которая соединяет тензодатчик, выводящий наивысшее значение сопротивления, является линией изгиба.
Когда тензодатчики располагаются, как показано на фиг. 9A, пользователь может изгибать любой участок дисплея 110 в любом направлении. Когда угол дисплея 110 изгибается, как показано на фиг. 9B, сила прилагается к тензодатчику 80-x, который перекрывает линию изгиба среди горизонтально расположенных тензодатчиков 80-1 - 80-n. Соответственно, выходное значение тензодатчика 80-X становится выше, чем у других тензодатчиков. Кроме того, поскольку сила прилагается к тензодатчику 80-y, который перекрывает линию изгиба среди вертикально расположенных тензодатчиков 80-n и 80-n+1 - 80-m, выходное значение тензодатчика 80-y изменяется. Гибкое устройство 100 отображения может определять, что линия, которая соединяет два тензодатчика 80-x и 80-y, выходные значения которых изменились, является линией изгиба.
На Фиг. 10A и 10B показан способ обнаружения направления изгиба согласно еще одному варианту осуществления настоящего изобретения.
На Фиг. 10A и 10B показан способ обнаружения направления изгиба с использованием датчиков ускорения как примера датчика. Согласно фиг. 10A и 10B, гибкий дисплей 110 может включать в себя множество датчиков 81-1 и 81-2 ускорения.
Датчики 81-1 и 81-2 ускорения это датчики, которые обнаруживают ускорение и направление ускорения, когда гибкий дисплей 110 движется. В частности, датчики 81-1 и 81-2 ускорения выводят значения обнаружения, соответствующие ускорению свободного падения, которое изменяется согласно наклону устройства, к которому присоединены датчики ускорения. Соответственно, если датчики 81-1 и 81-2 ускорения обеспечены на двух противоположных краевых областях, соответственно, выходные значения, обнаруживаемые датчиками 81-1 и 81-2 ускорения, изменяются, когда гибкий дисплей 110 изгибается. Гибкое устройство 100 отображения может вычислять угол тангажа и угол крена с использованием выходных значений, обнаруживаемых датчиками 81-1 и 81-2 ускорения. Соответственно, направление изгиба можно определять на основании изменений в угле тангажа и угле крена.
Согласно фиг. 10A датчики 81-1 и 81-2 ускорения обеспечены горизонтально на двух противоположных краях передней стороны гибкого дисплея 110. Однако возможно также, что датчики ускорения могут быть обеспечены вертикально, как на фиг. 10B. В этом случае, когда гибкий дисплей 110 вертикально изгибается, направление изгиба может обнаруживаться на основании выходных значений, обнаруженных датчиками 81-3 и 81-4 ускорения.
На фиг. 10A и 10B датчики ускорения обеспечены на левом и правом краях или верхнем и нижнем краях гибкого дисплея 110. Однако датчики ускорения могут обеспечиваться на левом, правом, верхнем и нижнем краях, или, альтернативно, на углах гибкого дисплея 110. Датчики ускорения необходимо обеспечить с разнесением на пороговое расстояние друг от друга на гибком дисплее 110.
Направление изгиба можно также обнаруживать с использованием гиродатчиков или геомагнитных датчиков вместо датчиков ускорения. Гиродатчик - это датчик для обнаружения угловой скорости путем измерения силы Кориолиса, для действия на направление скорости, когда происходит вращательное движение. Согласно значению, измеренному гиродатчиком, можно определять, в каком направлении происходит вращательное движение, чтобы можно было определять направление изгиба. Геомагнитный датчик это датчик для обнаружения азимута с использованием 2-осного или 3-осного феррозонда. Если используются геомагнитные датчики, геомагнитные датчики обеспечены на краях гибкого дисплея 110. Соответственно, когда краевая область изгибается, геомагнитный датчик выводит электрический сигнал, соответствующий изменению земного магнетизма вследствие перемещения положения. Гибкое устройство 100 отображения вычисляет угол рыскания с использованием значения, выводимого из геомагнитного датчика. Таким образом, гибкое устройство 100 отображения может определять разнообразные характеристики изгиба, например, область изгиба и направление изгиба согласно вычисленному изменению угла рыскания.
Гибкое устройство 100 отображения может обнаруживать изгиб с использованием различных типов датчиков. Вышеупомянутая конструкция датчиков и вышеупомянутый способ обнаружения можно применять к гибкому устройству 100 отображения по отдельности или совместно.
Датчик 120 может обнаруживать касание пользователя на экране дисплея 110, а также изгиб.
Например, датчик 120 может включать в себя прозрачную проводящую пленку, например, из оксида индия-олова (ITO), нанесенную на подложку 111 дисплея 110, и пленку, обеспеченную на прозрачной проводящей пленке. Соответственно, когда пользователь касается экрана, верхняя пленка и нижняя пленка контактируют друг с другом в точке прикосновения таким образом, что электрический сигнал может передаваться на контроллер 140.
Контроллер 140 распознает точку прикосновения с использованием координат электрода, который передает электрический сигнал. Поскольку способы обнаружения касания известны из различных документов, относящихся к уровню техники, их подробное описание здесь не приведено.
На Фиг. 11 показана блок-схема подробной конфигурации гибкого устройства 100 отображения для описания операций, согласующихся с разнообразными различными вариантами осуществления настоящего изобретения.
Согласно фиг. 11 гибкое устройство 100 отображения может включать в себя дисплей 110, датчик 120, средство 130 обеспечения обратной связи, контроллер 140, хранилище 150, блок 160 связи, блок 170 распознавания голоса, блок 180 распознавания движения, громкоговоритель 190, внешние входные порты 191-1 - 191-N и источник 200 питания.
Дисплей 110 является гибким. Поскольку конструкция и работа дисплея 110 подробно описаны выше, его подробное описание не повторяется.
В хранилище 150 могут храниться различные программы и данные, связанные с операцией гибкого устройства 100 отображения, информация настроек, заданная пользователем, операционное программное обеспечение, различные прикладные программы, и эффект обратной связи, соответствующий параметрам, которые составляют изгиб. Параметры могут включать в себя положение области изгиба (или линии изгиба), которое задает состояние изгиба, направление изгиба, угол изгиба, радиус изгиба и пр.
Датчик 120 обнаруживает пользовательские манипуляции, в частности, изгибы, которые происходят в гибком устройстве 100 отображения, а также в дисплее 110. Согласно ссылкой на фиг. 11, датчик 120 может включать в себя различные типы датчиков, например, датчик 121 прикосновения, геомагнитный датчик 122, гиродатчик 123, датчик 124 ускорения, датчик 125 изгиба, датчик 126 давления и датчик 127 близости.
Датчик 121 прикосновения можно реализовать емкостным или резистивным способом. Емкостной датчик прикосновения обнаруживает тонкое электричество от тела пользователя и вычисляет координаты прикосновения с использованием диэлектрического вещества, нанесенного на поверхность дисплея 110, когда участок тела пользователя касается поверхности дисплея 110. Резистивный датчик прикосновения это датчик прикосновения, который включает в себя две электродные пластины, внедренные в устройство дистанционного управления (не показано) в результате чего, когда пользователь касается дисплея 110, верхняя пластина и нижняя пластина в точке прикосновения контактируют, обнаруживается поток электричества, и, таким образом, можно вычислять координаты прикосновения. В отличие от этого, для обнаружения регистрации тактильных манипуляций можно использовать способ инфракрасного обнаружения, способ пропускания поверхностной ультразвуковой волны, способ измерения интегрального натяжения, способ пьезоэффекта, и пр.
Способ инфракрасного обнаружения представляет собой способ обнаружения позиции прикосновения с использованием признака, состоящего в том, что, когда объект, способный блокировать свет, например палец, касается экрана монитора, в котором предусмотрена оптоматричная рамка, свет, излучаемый из инфракрасного излучающего диода (IRED), блокируется, и, таким образом, не обнаруживается фототранзистором на противоположной стороне.
Способ пропускания поверхностной ультразвуковой волны представляет собой способ обнаружения интервала времени, в течение которого звук отражается и принимается передатчиком и отражателем, с использованием простого принципа, который использует признак распространения звука вдоль поверхности ультразвуковой волны. Признак распространения звука, состоящий в увеличении расстояния в течение определенного промежутка времени, является регулярным.
Способ измерения интегрального натяжения использует признак, состоящий в том, что при нажатии пальцем на один угол, устройство измерения натяжения на нажатом угле, из устройств измерения натяжения в четырех углах, принимает наивысшую силу. Сила преобразуется в электрический сигнал согласно степени увеличенной силы и передается на контроллер 140. В этом случае, контроллер 140 вычисляет пропорцию электрических сигналов четырех углов и, таким образом, находит позицию прикосновения.
В способе пьезоэффекта, когда пользователь касается дисплея 110, давления, прилагаемые к четырем углам, отличаются согласно степени и позиции давления касания. Контроллер 140 вычисляет отношение согласно давлениям и вычисляет из него координаты.
Датчик 121 прикосновения можно реализовать в различных формах, как описано выше.
Геомагнитный датчик 122 это датчик для обнаружения состояния вращения и направления движения гибкого устройства 100 отображения.
В частности, геомагнитный датчик 122 измеряет азимут. Таким образом, геомагнитный датчик 122 обнаруживает магнитное поле, сформированное в северном и южном направлении земли и измеряет азимут. Геомагнитный датчик 122 можно реализовать в виде a 3-осного геомагнитного датчика, который измеряет интенсивность и направление магнетизма относительно 3 осей, перпендикулярных друг другу. Северное направление, измеренное геомагнитным датчиком 122, может быть магнитный север. Хотя геомагнитный датчик 122 измеряет магнитный север, истинный север альтернативно можно выводить посредством внутреннего вычисления.
Гиродатчик 123 представляет собой инерциальный датчик для измерения угловой скорости вращения гибкого устройства 100 отображения. Таким образом, гиродатчик 123 находит текущее направление с использованием силы инерции вращающегося объекта. Гиродатчик 123 можно реализовать в виде 3-осного датчика угловой скорости, которой измеряет величину флуктуации угла поворота относительно 3 осей, перпендикулярных друг другу.
Датчик 124 ускорения обнаруживает степень наклона гибкого устройства 100 отображения. Датчик 124 ускорения может обнаруживать по меньшей мере одно из изменения ускорения и изменения углового ускорения, которое происходит, когда пользователь перемещает гибкое устройство 100 отображения. Датчик 124 ускорения можно реализовать в виде 3-осного датчика ускорения, которой измеряет величину флуктуации линейной скорости относительно 3 осей, перпендикулярных друг другу. Соответственно, датчик 124 ускорения может получать информацию, касающуюся наклона гибкого устройства 100 отображения.
Геомагнитный датчик 122, гиродатчик 123 и датчик 124 ускорения можно использовать не только для обнаружения свойств изгиба, например, направления изгиба и области изгиба гибкого устройства 100 отображения, но можно использовать также для обнаружения вращения и наклона гибкого устройства 100 отображения.
Датчик 125 изгиба можно реализовать в различных формах и различных количествах. Поскольку различные примеры конфигурации и работы датчика 125 изгиба были описаны выше, они здесь не повторяется.
Когда пользователь касается гибкого устройства 100 отображения или изгибает его, датчик 126 давления обнаруживает интенсивность давления, прилагаемого к гибкому устройству 100 отображения, и передает информацию на контроллер 140. Датчик 126 давления может включать в себя пьезоэлектрическую пленку, которая внедрена в дисплей 110 и выводит электрический сигнал, соответствующий интенсивности давления. На Фиг. 17 показан датчик 126 давления, отдельный из датчика 121 прикосновения (не показан). Однако если датчик 121 прикосновения является резистивным датчиком прикосновения, резистивный датчик прикосновения также может действовать как датчик 126 давления.
Датчик 127 близости это датчик, который обнаруживает движение приближения без какого-либо физического контакта с поверхностью дисплея 110. Датчик 127 близости можно реализовать в различных формах, например, типе высокочастотных колебаний для формирования высокочастотного магнитного поля и для обнаружения индукционного электрического тока с использованием признаков магнитного поля, которое изменяется с приближением объекта, магнитного типа, использующего магнетизм, и емкостного типа для обнаружения емкости, которая изменяется согласно приближению объекта.
Хотя это не показано на чертеже, датчик 120 может дополнительно включать в себя датчик хвата. Датчик хвата - это датчик, предусмотренный отдельно от датчика 126 давления на краю или ручке гибкого устройства 100 отображения для обнаружения хвата пользователя. Датчик хвата можно реализовать в виде датчика 121 прикосновения или датчика 126 давления.
Средство 130 обеспечения обратной связи может включать в себя одно или более из средства 131 обеспечения звуковой обратной связи, средства 132 обеспечения экранной обратной связи и средства 133 обеспечения тактильной обратной связи.
Средство 131 обеспечения звуковой обратной связи может обеспечивать соответствующую звуковую обратную связь, когда степень изгиба, обнаруженная датчиком 120, превышает пороговое значение. Например, средство 131 обеспечения звуковой обратной связи может обеспечивать звуковую обратную связь, например, звук зуммера или голосовое сообщение, которое можно задавать по умолчанию или которое может быть задано пользователем.
Средство 132 обеспечения экранной обратной связи может обеспечивать соответствующую экранную обратную связь, когда степень изгиба, обнаруженная датчиком 120, превышает пороговое значение. Например, средство 132 обеспечения экранной обратной связи может обеспечивать различную экранную обратную связь, например, изменение яркости экрана, мигание экраном или изменение цвета экрана.
Средство 133 обеспечения тактильной обратной связи может обеспечивать соответствующую тактильную обратную связь, когда степень изгиба, обнаруженная датчиком 120, превышает пороговое значение. Тактильная обратная связь позволяет пользователю ощущать вибрацию, силу или удар, сформированный из гибкого устройства 100 отображения. Тактильная обратная связь также называется технологией компьютерного тактильного восприятия.
В частности, средство 133 обеспечения тактильной обратной связи может обеспечивать различную тактильную обратную связь путем применения различных условий вибрации (например, частоты вибрации, длительности вибрации, интенсивности вибрации, формы волны вибрации и положения вибрации) согласно степени изгиба, обнаруженной под управлением контроллера 140. Поскольку способ формирования различной тактильной обратной связи путем применения различных способов вибрации уже опубликован, подробное описание здесь не повторяется.
Кроме того, средство 133 обеспечения тактильной обратной связи может обеспечивать тактильную обратную связь на переднюю сторону гибкого устройства 100 отображения (где располагается дисплей 110) и также может отдельно обеспечивать тактильную обратную связь на заднюю сторону. Кроме того, средство 133 обеспечения тактильной обратной связи может обеспечивать тактильную обратную связь на все гибкое устройство 100 отображения. Можно также обеспечивать тактильную обратную связь только на участок (например, края) гибкого устройства 100 отображения.
В вышеупомянутом варианте осуществления средство 133 обеспечения тактильной обратной связи обеспечивает тактильную обратную связь с использованием датчика вибрации. Средство 133 обеспечения тактильной обратной связи может альтернативно обеспечивать тактильную обратную связь с использованием пьезодатчика.
Контроллер 140 может управлять средством 130 обеспечения обратной связи для обеспечения конкретного типа обратной связи согласно степени изгиба, обнаруженной датчиком 120.
Кроме того, контроллер 140 может управлять средством 130 обеспечения обратной связи для обеспечения соответствующей обратной связи, когда степень изгиба, обнаруженная датчиком 120, превышает пороговое значение. Поскольку другие функции контроллера 140 были описаны выше со ссылкой на фиг. 1, подробное описание здесь не повторяется.
Блок 160 связи осуществляет связь с различными типами внешних устройств согласно различным способам осуществления связи. Блок 160 связи может включать в себя различные модули связи, например, широковещательный модуль 161 приема, модуль 162 беспроводной связи в локальной области, модуль 163 глобальной системы позиционирования (GPS) и модуль 164 беспроводной связи. Широковещательный модуль 161 приема может включать в себя наземный широковещательный модуль приема (не показан), который включает в себя антенну, демодулятор и эквалайзер для приема наземного широковещательного сигнала и модуль цифрового мультимедийного вещания (DMB) для приема сигнала DMB. Модуль 162 беспроводной связи в локальной области это модуль, который осуществляет связь с внешним устройством, которое располагается в локальной области, согласно стандартам беспроводной связи в локальной области, например, ближняя бесконтактная связь (NFC), Bluetooth, Zigbee и т.д. Модуль 163 GPS это модуль, который принимает сигналы GPS от спутников GPS и, таким образом обнаруживает текущее положение гибкого устройства 100 отображения. Модуль 164 беспроводной связи это модуль, который подключен к внешней сети и осуществляет связь согласно таким протоколам беспроводной связи как WiFi, Institute of Electrical and Electronics Engineers (IEEE) 802.11 и т.д. Блок 160 связи может дополнительно включать в себя модуль мобильной связи, который осуществляет доступ к сети мобильной связи и осуществляет связь согласно различным стандартам мобильной связи, например, 3-го поколения (3G), проект партнерства третьего поколения (3GPP), проект долгосрочного развития систем связи (LTE) и т.д.
Контроллер 140 может распознавать голосовой ввод или ввод движения, а также изгибные манипуляции и тактильные манипуляции, и осуществлять соответствующую операцию. В этом случае, блок 170 распознавания голоса и блок 180 распознавания движения могут активироваться.
Блок 170 распознавания голоса собирает голос пользователя или внешний звук с использованием средства получения голоса, например микрофона (не показан) и передает собранный звук на контроллер 140. В режиме голосового управления, когда голос пользователя соответствует одной из предварительно сохраненных голосовых команд, контроллер 140 может осуществлять задачу, соответствующую голосу пользователя.
Блок 180 распознавания движения получает изображение пользователя с использованием средства фотографирования изображений (не показано), например камеры, и передает полученное изображение на контроллер 140. В режиме двигательного управления, контроллер 140 анализирует изображение пользователя и осуществляет операцию, соответствующую двигательному жесту, когда определено, что пользователь осуществляет двигательный жест, соответствующий одной из предварительно сохраненных команд движения.
Например, выполнением различных задач, например, переключением каналов, включением или отключением гибкого устройства 100 отображения, постановкой на паузу, воспроизведением, остановкой, перемоткой назад, быстрой перемоткой вперед и приглушением звука, можно управлять голосом или движением, но настоящее изобретение не ограничивается этим.
Внешние входные порты 1-n (191-1 - 191-N) подключены к различным типам внешних устройств для приема различных данных, программ и команд управления. В частности, внешние входные порты 191-1 - 191-N могут включать в себя один или более из порта универсальной последовательной шины (USB), порта гарнитуры, порта мыши, порта локальной сети (LAN) и т.д. Источник 200 питания подает электрическую мощность на компоненты гибкого устройства 100 отображения. Источник 200 питания может включать в себя один или более из положительного токоприемника, положительного электрода, электролитного участка, отрицательного электрода, катодного токоприемника и оболочки, которая покрывает предыдущие. Источник 200 питания можно реализовать в виде вторичной батареи. Источник 200 питания также может быть гибким, чтобы он мог изгибаться вместе с гибким устройством 100 отображения. В этом случае, токоприемники, электроды и оболочка могут быть выполнены из гибких материалов. Ниже будут описаны более конкретные форма и материалы источника 200 питания.
На фиг. 11 показаны различные компоненты гибкого устройства 100 отображения, но гибкое устройство 100 отображения не обязано включают в себя все компоненты и также может включать в себя другие компоненты. Другими словами, из гибкого устройства 100 отображения могут быть исключены некоторые компоненты, в него можно добавлять другие компоненты, или некоторые компоненты можно заменять другими согласно типу.
Контроллер 140 управляет каждым компонентом для осуществления операции согласно пользовательской манипуляции, которая распознается датчиком 120, блоком 170 распознавания голоса или блоком 180 распознавания движения.
На Фиг. 12 показана подробная конфигурация контроллера 140, показанного на фиг. 11.
Согласно фиг. 12, контроллер 140 может включать в себя системную память 141, главный центральный процессор (ЦП) 142, процессор 143 изображений, сетевой интерфейс 144, интерфейс 145 хранилища, интерфейсы с первого по n-й 146-1 - 146-n, аудиопроцессор 147 и системную шину 148.
Системная память 141, главный ЦП 142, процессор 143 изображений, сетевой интерфейс 144, интерфейс 145 хранилища, интерфейсы с первого по n-й 146-1 - 146-n и аудиопроцессор 147 могут быть соединены друг с другом системной шиной 148 для передачи и приема различных данных и сигналов.
Интерфейсы с первого по n-й 146-1 - 146-n поддерживают сопряжение из различных компонентов, включающих в себя датчик 120 и компоненты контроллера 140. На фиг. 12 показано, что датчик 120 соединен только с первым интерфейсом 146-1. Однако, если датчик 120 включает в себя различные типы датчиков, как показано на фиг. 11, соответствующие датчики могут быть подключены к соответствующим интерфейсам. По меньшей мере, один из интерфейсов с первого по n-й 146-1 - 146-n можно реализовать в виде входного интерфейса, который принимает различные сигналы от кнопок, обеспеченных на корпусе гибкого устройства 100 отображения, или от внешних устройств, подключенных через внешние входные порты 1-n.
Системная память 141 может включать в себя постоянное запоминающее устройство (ПЗУ) 141-1 и оперативную память (ОЗУ) 141-2. ПЗУ 141-1 сохраняет набор команд для начальной загрузки системы. Когда вводится команда включения и подается питание, главный ЦП 142 копирует операционную систему (OS), хранящуюся в хранилище 150, в ОЗУ 141-2 и выполняет OS согласно командам, хранящимся в ПЗУ 141-1, что позволяет системе загружаться. По завершении загрузки, главный ЦП 142 копирует различные прикладные программы, хранящиеся в хранилище 150, в ОЗУ 141-2 и выполняет скопированные прикладные программы, благодаря чему, могут осуществляться различные операции.
Как описано выше, главный ЦП 142 может осуществлять различные операции путем выполнения прикладной программы, хранящейся в хранилище 150.
Интерфейс 145 хранилища подключен к хранилищу 150 для передачи или приема программ, содержания и данных.
Например, когда пользователь осуществляет изгибную манипуляцию или тактильную манипуляцию, соответствующую команде воспроизведения, для воспроизведения и отображения содержания, хранящегося в хранилище 150, главный ЦП 142 осуществляет доступ к хранилищу 150 через интерфейс 145 хранилища, формирует список сохраненного содержания и отображает список на дисплее 110. В этом состоянии, когда пользователь осуществляет изгибную манипуляцию или тактильную манипуляцию для выбора содержания, главный ЦП 142 запускает программу воспроизведения содержания хранящуюся в хранилище 150. Затем главный ЦП 142 формирует экран воспроизведения содержания, управляя процессором 143 изображений согласно командам, включенным в программу воспроизведения содержания.
Процессор 143 изображений может включать в себя (не показаны) один или более из декодера, блока визуализации и блока масштабирования. Соответственно, процессор 143 изображений декодирует сохраненное содержание, формирует кадр путем визуализации декодированного содержания и масштабирует размер кадра, чтобы вписать его в экран дисплея 110. Процессор 143 изображений передает обработанный кадр на дисплей 110, и, таким образом дисплей 110 отображает содержание.
Аудиопроцессор 147 обрабатывает аудиоданные и передает аудиоданные на средство вывода звука, например, громкоговоритель 190. Аудиопроцессор 147 обрабатывает аудиосигнал путем декодирования аудиоданных, хранящихся в хранилище 150, или аудиоданных, принятых через блок 160 связи, осуществляя фильтрацию шума и усиливая аудиоданные до надлежащего уровня. В вышеупомянутом примере, при воспроизведении видеосодержания, аудиопроцессор 147 обрабатывает аудиоданные, демультиплексированные из видеосодержания, и выдает аудиоданные на громкоговоритель 190 синхронно с процессором 143 изображений.
Сетевой интерфейс 144 соединяет гибкое устройство 100 отображения с внешним устройством через сеть. Например, при выполнении приложения веб-браузера, главный ЦП 142 осуществляет доступ к веб-серверу через сетевой интерфейс 144. При приеме данных веб-страницы от веб-сервера, главный ЦП 142 управляет процессором 143 изображений для формирования экрана веб-страницы и отображает экран веб-страницы на дисплее 110.
Когда обнаружен изгиб гибкого устройства 100 отображения, контроллер 140 определяет, превышает ли изгиб пороговое значение, как описано выше. Когда определено, что изгиб превышает пороговое значение, контроллер 140 считывает информацию обратной связи соответствующий изгибу из хранилища 150 и осуществляет операцию, соответствующую информации обратной связи. Эта операция контроллера 140 может осуществляться путем выполнения различных программ, хранящихся в хранилище 150.
На Фиг. 13 показана конфигурация программного обеспечения в хранилище 150 для поддержки операций контроллера 140, согласующихся с различными вариантами осуществления настоящего изобретения. Согласно фиг. 13, в хранилище 150 может храниться один или более из базового модуля 2310, модуля 2320 устройства управления, модуля 2330 связи, модуля 2340 представления, модуля 2350 веб-браузера и служебного модуля 2360.
Базовый модуль 2310 это базовый модуль, который обрабатывает сигнал, передаваемый от оборудования, включенного в гибкое устройство 100 отображения, и передает сигнал на модуль верхнего слоя.
Базовый модуль 2310 может включать в себя один или более из модуля 2311 хранения, модуль 2312 места действия, модуль 2313 безопасности и сетевой модуль 2314.
Модуль 2311 хранения это программный модуль, который управляет базой данных (DB) и реестром. Модуль 2312 места действия это программный модуль, который поддерживает услугу на основе местоположения, согласующуюся с оборудованием, например, микросхема GPS. Модуль 2313 безопасности это программный модуль, который поддерживает одно или более из сертификации, разрешения и безопасного хранения оборудования. Сетевой модуль 2314 представляет собой модуль, который поддерживает сетевое соединение, которое включает в себя модуль DNET и модуль Universal Plug and Play (UPnP).
Модуль 2320 устройства управления представляет собой модуль, который управляет и использует внешний ввод и информацию, касающуюся внешнего устройства. Модуль 2320 устройства управления может включать в себя один или более из модуля 2321 обнаружения, модуля 2322 управления информацией об устройстве и модуля 2323 пульта дистанционного управления.
Модуль 2321 обнаружения - это модуль, который анализирует данные датчика, обеспеченные датчиками в датчике 120. В частности, модуль 2321 обнаружения является программным модулем, который обнаруживает положение объекта, положение пользователя, цвет, форму, размер и другие профили. Модуль 2321 обнаружения может включать в себя один или более из модуля распознавания лиц, модуля распознавания голоса, модуля распознавания движения, и модуля распознавания NFC. Модуль 2322 управления информацией об устройстве это модуль, который обеспечивает информацию, касающуюся различных устройств. Модуль 2323 пульта дистанционного управления это программный модуль, который дистанционно управляет периферийными устройствами, например, телефоном, телевизором, принтером, камерой или кондиционером.
Модуль 2330 связи это модуль, который внешне осуществляет связь. Модуль 2330 связи может включать в себя один или более из модуля 2331 обмена сообщениями, например, программы обмена сообщениями, программ службы коротких сообщений (SMS) и службы мультимедийных сообщений (MMS) и программы электронной почты, и модуля 2332 телефонии, включающего в себя программный модуль объединителя информации вызова и модуль голосовой связи через интернет-протокол (VoIP).
Модуль 2340 представления это модуль, который формирует экран дисплея. Модуль 2340 представления может включать в себя один или более из мультимедийного модуля 2341 для воспроизведения и вывода мультимедийного содержания и модуля 2342 пользовательского интерфейса (ПИ) и графики для обработки ПИ и графики. Мультимедийный модуль 2341 может включать в себя один или более из модуля проигрывателя, модуля видеокамеры и модуля обработки звука. Соответственно, мультимедийный модуль 2341 воспроизводит различное мультимедийное содержание и формирует и воспроизводит экран и звуки. Модуль 2342 ПИ и графики может включать в себя один или более из модуля 2342-1 составления изображений, модуля 2342-2 объединения координат для объединения и формирования координат для отображения изображения на экране, модуля 2342-3 X11 для приема различных типов событий от оборудования и комплекта 2342-4 инструментов 2D/3D ПИ для обеспечения инструментов для образования 2D или 3D ПИ.
Модуль 2350 веб-браузера это модуль, который осуществляет доступ к веб-серверу посредством веб-обозревания. Модуль 2350 веб-браузера может включать в себя различные модули, например, один или более из модуля веб-просмотра для формирования веб-страницы, модуля агента загрузки для осуществления загрузки, модуля закладки и модуля веб-комплекта.
Кроме того, служебный модуль 2360 представляет собой модуль приложений, который обеспечивает различные услуги. Например, служебный модуль 2360 может включать в себя различные модули, например, один или более из модуля навигационных услуг для обеспечения карты, текущего положения, ориентира и информации маршрута, игрового модуля и модуля рекламных приложений.
Главный ЦП 142 контроллера 140 осуществляет доступ к хранилищу 150 через интерфейс 145 хранилища, копирует модуль, хранящийся в хранилище, в ОЗУ 141-2 и осуществляет операцию скопированного модуля согласно операции скопированного модуля.
В частности, главный ЦП 142 анализирует выходные значения различных датчиков в датчике 120 с использованием модуля 2321 обнаружения, идентифицирует область изгиба, линию изгиба, направление изгиба, количество изгибных манипуляций, угол изгиба, скорость изгиба, область прикосновения, количество касаний, интенсивность касания, интенсивность давления, степень близости, наличие или отсутствие хвата пользователя, и определяет, превышает ли изгибная манипуляция пороговое значение. Когда главный ЦП 142 определяет, что изгибная манипуляция превышает пороговое значение, главный ЦП 142 обнаруживает информацию обратной связи, соответствующую изгибу, из базы данных модуля 2310 хранения, возбуждает модуль, соответствующий обнаруженной информации обратной связи, и осуществляет соответствующую операцию.
Например, если изгибная манипуляция является операцией для отображения ГИП, главный ЦП 142 формирует экран ГИП с использованием модуля 2342-1 составления изображений в модуле 2340 представления, определяет позицию отображения экрана ГИП с использованием модуля 2342-2 объединения координат, и управляет дисплеем 110 для отображения экрана ГИП.
Кроме того, когда осуществляется пользовательская манипуляция для одной из различных операций, обеспеченных гибким устройством 100 отображения, главный ЦП 142 возбуждает соответствующий модуль и осуществляет соответствующую операцию.
Например, когда пользовательская манипуляция осуществляется для операции приема сообщения, главный ЦП 142 выполняет модуль 2331 обмена сообщениями, осуществляет доступ к серверу управления сообщениями и принимает сообщение, хранящееся в учетной записи пользователя. Затем главный ЦП 142 формирует экран, соответствующий принятому сообщению, с использованием модуля 2340 представления и отображает экран на дисплее 110. Кроме того, для осуществления операции вызова, главный ЦП 142 возбуждает модуль 2332 телефонии.
Ввиду вышеизложенного, в хранилище 150 могут храниться программы различных структур, и контроллер 140 может осуществлять операции, согласующиеся с вышеописанными различными вариантами осуществления, с использованием программ, хранящихся в хранилище 150.
На Фиг. 14 показан способ обеспечения обратной связи, согласующийся с вариантом осуществления настоящего изобретения.
Гибкое устройство 100 отображения может изгибаться пользователем, как показано на фиг. 14. В этом случае, когда степень изгиба превышает пороговое значение, гибкое устройство 100 отображения может обеспечивать соответствующую обратную связь.
Когда степень изгиба гибкого устройства 100 отображения превышает пороговое значение, как показано на фиг. 14, гибкое устройство 100 отображения может обеспечивать звуковую обратную связь. Например, «зуммер зуммер ~» может обеспечиваться как звуковая обратная связь.
В этом случае, когда степень изгиба, то есть радиус изгиба кривизны на линии изгиба области изгиба, превышает пороговое значение, гибкое устройство 100 отображения может обеспечивать соответствующую обратную связь.
На Фиг. 15 показан способ обеспечения обратной связи, согласующийся с другим вариантом осуществления настоящего изобретения.
Когда гибкое устройство 100 отображения изгибается пользователем, как показано на фиг. 15, гибкое устройство 100 отображения может обеспечивать соответствующую обратную связь согласно степени изгиба.
Когда степень изгиба гибкого устройства 100 отображения превышает пороговое значение, как показано на фиг. 15, гибкое устройство 100 отображения может обеспечивать соответствующую экранную обратную связь. Например, экран дисплея может становиться в целом более темным, но это всего лишь пример. Можно обеспечить различные типы экранной обратной связи, например, мигание экраном дисплея или изменение участка экрана дисплея, которые пользователь может распознавать.
На Фиг. 16 показан способ обеспечения обратной связи, согласующийся с еще одним вариантом осуществления настоящего изобретения.
Когда степень изгиба гибкого устройства 100 отображения превышает пороговое значение, как показано на фиг. 16, гибкое устройство 100 отображения может обеспечивать соответствующую тактильную обратную связь. Например, тактильная обратная связь может обеспечиваться от всего или части (например, краев) гибкого устройства 100 отображения. Поскольку способ обеспечения тактильной обратной связи описан выше, подробное описание не повторяется.
На Фиг. 17 показан способ обеспечения обратной связи, согласующийся с еще одним вариантом осуществления настоящего изобретения.
Как показано на фиг. 17, элемент 17, имеющий коэффициент предельного напряжения, может быть смонтирован в области гибкого устройства 100 отображения.
Область монтажа может быть гибкой областью гибкого устройства 100 отображения за исключением жесткой области.
В этом случае, когда область, в которой смонтирован элемент 17, изгибается сверх коэффициента предельного напряжения, элемент 17 разрушается.
Соответственно, когда гибкое устройство 100 отображения дает сбой, можно определять, происходит ли отказ вследствие чрезмерного изгиба, путем проверки состояния элемента 17.
На Фиг. 18 и 19 показан способ обеспечения обратной связи, согласующийся с другими вариантами осуществления настоящего изобретения.
Как показано на фиг. 18 и 19, пороговое значение для обеспечения обратной связи можно задавать согласно области гибкого устройства 100 отображения.
Если гибкое устройство 100 отображения может складываться пополам и оставаться в сложенном состоянии, как показано на фиг. 18, пороговое значение области, на которой формируется вертикальная линия 18-1 изгиба, можно задавать высоким, как показано в левой стороне фиг. 18. Соответственно, хотя происходит значительный изгиб, соответствующая обратная связь может не обеспечиваться. Однако пороговое значение области, на которой формируется горизонтальная линия 18-2 изгиба, можно задавать более низким, как показано в правой стороне фиг. 18. Соответственно, когда происходит изгиб пороговой степени, может обеспечиваться соответствующая обратная связь.
Как показано в левой стороне фиг. 19, изгиб вдоль вертикальной линии изгиба можно задавать с более высоким пороговым значением, чем изгиб вдоль горизонтальной линии изгиба. Соответственно, когда происходит изгиб одной и той же степени, изгиб вдоль вертикальной линии изгиба может не обеспечивать соответствующую обратную связь, и изгиб вдоль горизонтальной линии изгиба может обеспечивать соответствующую обратную связь. Например, когда изгиб вдоль вертикальной линии изгиба и изгиб вдоль горизонтальной линии изгиба происходят с одной и той же степенью, как показано в середине фиг. 19, изгибе вдоль вертикальной линии изгиба не обеспечивает обратную связь, и изгиб вдоль горизонтальной линии изгиба обеспечивает обратную связь. Кроме того, когда изгиб вдоль вертикальной линии изгиба происходит с более высокой степенью, как показано на третьей линии фиг. 19, обратная связь также может обеспечиваться.
В вышеупомянутом варианте осуществления были описаны изгиб вдоль вертикальной линии изгиба и изгиб вдоль горизонтальной линии изгиба. В случае диагонального изгиба и вертикального или горизонтального изгиба, пороговое значение можно задавать по-разному согласно области.
На Фиг. 20 показан способ обеспечения обратной связи, согласующийся с еще одним вариантом осуществления настоящего изобретения.
Когда конкретная область чрезмерно изгибается, как показано на фиг. 20, функциональный модуль в соседней области может не действовать обычным образом. В этом случае, когда пользователь пытается использовать функциональный модуль, гибкое устройство 100 отображения может обеспечивать предупреждающее сообщение. Например, когда устройство 100 отображения изгибается, модуль 19 камеры может закрываться и не действовать обычным образом. В этом случае, когда пользователь пытается использовать модуль 19 камеры, гибкое устройство 100 отображения может обеспечивать соответствующее предупреждающее сообщение. В этом случае, можно предварительно сохранять информацию о том, что, когда соответствующий область изгибается сверх порогового значения, модуль 19 камеры не может действовать обычным образом.
На Фиг. 21 показан способ обеспечения обратной связи, согласующийся с еще одним вариантом осуществления настоящего изобретения.
Как показано на фиг. 21, обратная связь может обеспечиваться согласно степени изгиба гибкого устройства 100 отображения. В частности, один и тот же тип обратной связи (например, вибрация) может обеспечиваться с измененной характеристикой, например, другой интенсивностью, или могут одновременно обеспечиваться разные типы обратной связи (например, вибрация и звук зуммера).
В этом случае, степень изгиба можно делить на множество уровней, и можно заранее задавать обратную связь, соответствующую каждому уровню. Например, пороговое значение, которое обеспечивает обратную связь, можно задавать низким, и, когда гибкое устройство 100 отображения изгибается сверх заданного порогового значения, интенсивность обратной связи может увеличиваться согласно уровню изгиба.
Например, когда гибкое устройство 100 отображения изгибается на первом уровне, превышающем заданное пороговое значение, как показано на фиг. 21, может обеспечиваться тактильная обратная связь, которая формирует слабую вибрацию. Когда гибкое устройство 100 отображения изгибается на втором уровне, может обеспечиваться тактильная обратная связь, которая формирует промежуточную вибрацию. Когда гибкое устройство 100 отображения изгибается на третьем уровне, может обеспечиваться звук зуммера совместно с тактильной обратной связью, которая формирует сильную вибрацию. В случае изгиба на третьем уровне можно также обеспечивать только тактильную обратную связь, которая формирует сильную вибрацию.
На Фиг. 22 показан способ обеспечения обратной связи, согласующийся с еще одним вариантом осуществления настоящего изобретения.
Как показано на фиг. 22, когда изгиб сверх порогового значения повторно происходит в конкретной области гибкого устройства 100 отображения, может обеспечиваться разная обратная связь согласно количеству повторений.
В частности, с возрастанием количества изгибных манипуляций, превышающих пороговое значение, может обеспечиваться более сильная обратная связь. Например, когда происходит первый изгиб, превышающий пороговое значение, как показано в нижней левой части фиг. 22, может обеспечиваться слабая тактильная обратная связь. Когда происходит второй изгиб, превышающий пороговое значение, как показано в нижней правой части фиг. 22, может обеспечиваться промежуточная тактильная обратная связь. Когда происходит третий изгиб, превышающий пороговое значение, как показано в верхней правой части фиг. 22, может обеспечиваться сильная тактильная обратная связь.
На Фиг. 23 показан способ обеспечения обратной связи, согласующийся с еще одним вариантом осуществления настоящего изобретения.
Когда множество областей гибкого устройства 100 отображения одновременно изгибаются сверх порогового значения, как показано на фиг. 23, может одновременно обеспечиваться обратная связь,
соответствующая множеству областей.
Например, когда первая область 231 и вторая область 232 одновременно изгибаются сверх порогового значения, как показано в нижней части фиг. 23, может одновременно обеспечиваться заранее заданная обратная связь для первой и второй областей 231 и 232. Таким образом, одновременно обеспечиваются обратная связь “зуммер зуммер зуммер ~”, заданная для первой области 231 и обратная связь «гудок гудок гудок ~», заданная для второй области 232.
Кроме того, хотя это не показано на фиг. 23, в качестве тактильной обратной связи можно также обеспечивать локальную вибрацию для первой области 231 и второй области 232.
На Фиг. 24 показан пример формы гибкого устройства 100 отображения, которое встроено в основной корпус, согласно варианту осуществления настоящего изобретения.
Как показано на фиг. 24, гибкое устройство 100 отображения может включать в себя основной корпус 240, дисплей 110 и участок 241 хвата.
Основной корпус 240 играет роль кожуха, вмещающего в себя дисплей 110. Если гибкое устройство 100 отображения включает в себя компоненты, показанные на фиг. 11, остальные компоненты, за исключением дисплея 110 и участка датчиков, могут быть встроены в основной корпус 240. Основной корпус 240 включает в себя вращающийся валик для скатывания дисплея 110. Соответственно, когда дисплей 110 не используется, дисплей 110 можно скатывать в основной корпус 240 с помощью вращающегося валика для безопасного хранения.
Когда пользователь удерживает и тянет участок 241 хвата, вращающийся валик вращается и высвобождается в направлении, противоположном направлению скатывания, в результате чего, дисплей 110 выходит из основного корпуса 240. Вращающийся валик может включать в себя стопор. Когда пользователь вытягивает участок 241 хвата больше, чем на заданное расстояние, вращающийся валик останавливается стопором, и дисплей 110 фиксируется. В результате, пользователь может использовать различные функции с использованием вытащенного дисплея 110. Когда пользователь отпускает стопор, стопор освобождается, и вращающийся валик вращается в обратном направлении. В результате, дисплей 110 снова скатывается в основной корпус 240. Стопор можно реализовать в виде переключателя для остановки работы шестерни, вращающей вращающийся валик. Поскольку вращающийся валик и стопор могут использовать обычную конструкцию скатывания, отвечающую уровню техники, их подробное описание и иллюстрация здесь опущены.
Основной корпус 240 может включать в себя источник 200 питания. Источник 200 питания можно реализовать в различных формах, например, в виде разъема батареи, в котором устанавливается одноразовая батарея, вторичная батарея, допускающая перезарядку, или солнечная батарея, которая использует мощность, вырабатываемую солнечным светом. Если источником 200 питания является вторичная батарея, пользователь может заряжать источник 200 питания путем соединения основного корпуса 240 и внешнего источника питания с использованием кабеля.
На фиг. 24 основной корпус 240 показан в цилиндрической форме, но основной корпус 240 также можно обеспечивать в различных других формах, например, четырехугольной или многоугольной форме. Кроме того, на фиг. 24, дисплей 110 встроен в основной корпус 240 и обнажается путем вытягивания дисплея 110. Однако можно также окружать наружную часть основного корпуса 240 или обеспечивать дисплей 110 в других формах.
На Фиг. 25 показано гибкое устройство 100 отображения, включающее в себя отсоединяемый источник 200 питания согласно варианту осуществления настоящего изобретения. Согласно фиг. 25, источник 200 питания обеспечивается с возможностью присоединения или отсоединения от края гибкого устройства 100 отображения.
Источник 200 питания может включать в себя гибкий материал и, таким образом, может изгибаться совместно с дисплеем 110. В частности, источник 200 питания может включать в себя один или более из катодного токоприемника, отрицательного электрода, электролитного участка, положительного токоприемника, положительного электрода и оболочки, которая покрывает предыдущие элементы.
Например, токоприемник может включать в себя один или более из сплава, например TiNi, обладающего высокой упругостью, чистого металла, например, меди или алюминия, чистого металла, покрыто углеродом, проводящего материала, например, углерода или углеволокна, проводящего полимера, например, полипиррол, и пр.
Катодный токоприемник может включать в себя материал отрицательного электрода, который может включать в себя один или более из металла, например, лития, натрия, цинка, магния, кадмия, сплава хранения водорода или свинца, неметалла, например, углерода, и полимерного материала электрода, например, органического соединения серы.
Положительный электрод может включать в себя материал положительного электрода, который может включать в себя один или более из серы, сульфида металла, оксида металла после лития, например LiCoO2, SOC12, MnO2, Ag2O, Cl2, NiCl2 или NiOOH, и полимерного электрода. Электролитный участок может обеспечиваться в виде геля с использованием один или более из PEO, PVdF, PMMA или PVAC.
Оболочка может включать в себя одну или более из обычной полимерной смолы, например, PVC, HDPE и эпоксидной смолы. Кроме того, любой материал, который может свободно изгибаться или является гибким и препятствует повреждению батареи, в форме нити, можно использовать в качестве оболочки.
Каждый из положительного электрода и отрицательного электрода в источнике 200 питания может включать в себя разъем для электрического подключения к наружной части.
Согласно фиг. 25 разъемы могут выступать из источника 200 питания, и дисплей 110 может иметь канавки, которые соответствуют положению, размеру и форме разъемов. Соответственно, когда разъемы соединены с канавками, источник 200 питания соединен с дисплеем 110. Разъемы источника 200 питания соединяются с площадкой подключения питания (не показана) в гибком устройстве 100 отображения для обеспечения подачи мощности.
Согласно фиг. 25 источник 200 питания присоединяется к или отсоединяться от края гибкого устройства 100 отображения, но это всего лишь пример. Положение и форма источника 200 питания может изменяться согласно признакам гибкого устройства 100 отображения. Например, если гибкое устройство 100 отображения имеет конкретную толщину, источник питания может присоединяться к задней стороне гибкого устройства 100 отображения, соответственно.
На Фиг. 26 показана блок-схема операций способа обеспечения обратной связи, согласующегося с вариантом осуществления настоящего изобретения.
Согласно фиг. 26, в операции S2610, когда гибкое устройство 100 отображения изгибается, обнаруживается изгиб.
В операции S2620 производится определение, превышает ли обнаруженная степень изгиба пороговое значение. Пороговым значением может быть радиус кривизны.
Если в операции S2620 определено, что обнаруженная степень изгиба превышает пороговое значение, в операции S2630 обеспечивается соответствующая обратная связь.
В операции S2630 обеспечения обратной связи, обратная связь может обеспечиваться согласно обнаруженной степени изгиба с использованием предварительно сохраненной обратной связи, которая задана согласно степени изгиба.
Кроме того, в операции S2630 обеспечения обратной связи, обратная связь может обеспечиваться к области изгиба, на которой изгиб превышает пороговое значение, с использованием предварительно сохраненного порогового значения, которое задано согласно области изгиба.
Кроме того, в операции S2630 обеспечения обратной связи, обратная связь может обеспечиваться в положение, соответствующее области изгиба, согласно положению области изгиба, превышающего пороговое значение.
Кроме того, в операции S2630 обеспечения обратной связи, когда изгиб, превышающий пороговое значение, происходит повторно, может обеспечиваться различная обратная связь согласно количеству повторений.
Кроме того, в операции S2630 обеспечения обратной связи может обеспечиваться по меньшей мере одна из экранной обратной связи для изменения состояния отображения или вывода графического сообщения, звуковой обратной связи для вывода предупреждающего звукового сигнала или голосового сообщения и тактильной обратной связи для формирования вибрации.
Экранная обратная связь может изменять состояние отображения путем изменения по меньшей мере одного из цвета и яркости экрана или посредством мигания экраном.
Кроме того, когда обнаруженная степень изгиба превышает пороговое значение, может храниться информация, относящаяся к изгибу.
Кроме того, когда информация, относящаяся к изгибу, передается на внешний сервер, внешний сервер может обеспечивать услуги или информацию, касающуюся изгибной манипуляции.
Информация, относящаяся к изгибу, может включать в себя по меньшей мере одно из положения изгиба, времени поддержания изгиба и степени изгиба.
В вышеописанных вариантах осуществления, описано устройство, включающее в себя гибкий дисплей. Однако способ обеспечения обратной связи согласно различным вариантам осуществления настоящего изобретения можно применять к гибкому устройству, которое не включает в себя дисплей. В этом случае, может обеспечиваться по меньшей мере, одна из звуковой обратной связи и тактильной обратной связи. Кроме того, способ обеспечения обратной связи согласно вариантам осуществления настоящего изобретения не ограничивается вышеупомянутыми способами. Можно применять любой способ, который пользователь может воспринимать как обратная связь.
Согласно вариантам осуществления настоящего изобретения, когда гибкое устройство отображения чрезмерно изгибается, соответствующая обратная связь обеспечивается таким образом, чтобы пользователь мог понять, что изгиб является чрезмерным. Соответственно, можно предотвратить повреждение или отказ вследствие чрезмерного изгиба.
Вышеупомянутые различные способы можно реализовать в виде приложения.
В частности, согласно варианту осуществления настоящего изобретения, на постоянном машиночитаемом носителе хранится операции осуществления программы, обнаруживающей изгиб гибкого устройства отображения и обеспечивающей обратную связь по изгибу, когда обнаруженная степень изгиба превышает пороговое значение.
Кроме того, предусмотрен постоянный машиночитаемый носитель, на котором хранится программа для эффекта обеспечения обратной связи согласно вышеупомянутым вариантам осуществления.
Постоянный машиночитаемый носитель - это носитель, на котором данные не хранятся временно, например, регистр или кэш-память, но данные хранятся квазипостоянно и считываются устройствами. В частности, вышеупомянутые приложения или программы могут храниться и обеспечиваться на постоянном машиночитаемом носителе, например, компакт-диске (CD), цифровом универсальном диске (DVD), жестком диске, диске Blu-ray, флэш-диске USB, карте памяти или ПЗУ.
Соответственно, если гибкое устройство отображения имеет конструкцию, способную обнаруживать изгиб, вышеупомянутую программу можно устанавливать таким образом, чтобы вышеупомянутые интуитивные эффекты обратной связи могли обеспечиваться согласно состоянию изгиба.
Хотя настоящее изобретение показано и описано со ссылкой на различные варианты его осуществления, специалистам в данной области техники очевидно, что можно предложить различные изменения, касающиеся формы и подробностей, не выходящие за рамки сущности и объема настоящего изобретения, которые определены нижеследующей формулой изобретения и ее эквивалентов.
| название | год | авторы | номер документа |
|---|---|---|---|
| ГИБКОЕ УСТРОЙСТВО ОТОБРАЖЕНИЯ И СПОСОБ УПРАВЛЕНИЯ ИМ | 2013 |
|
RU2609093C2 |
| ГИБКОЕ УСТРОЙСТВО ОТОБРАЖЕНИЯ И СПОСОБ УПРАВЛЕНИЯ ИМ | 2013 |
|
RU2652459C2 |
| ГИБКОЕ УСТРОЙСТВО ДЛЯ ОБЕСПЕЧЕНИЯ ИНТЕРАКТИВНОГО РУКОВОДСТВА ПО ИЗГИБУ И СООТВЕТСТВУЮЩИЙ СПОСОБ УПРАВЛЕНИЯ | 2013 |
|
RU2617600C2 |
| ГИБКОЕ УСТРОЙСТВО И СПОСОБ УПРАВЛЕНИЯ ГИБКИМ УСТРОЙСТВОМ | 2013 |
|
RU2645665C2 |
| ГИБКОЕ УСТРОЙСТВО И СПОСОБ ДЛЯ УПРАВЛЕНИЯ ЕГО РАБОТОЙ | 2013 |
|
RU2628174C2 |
| ГИБКОЕ УСТРОЙСТВО ОТОБРАЖЕНИЯ И СООТВЕТСТВУЮЩИЙ СПОСОБ ОТОБРАЖЕНИЯ | 2013 |
|
RU2656977C2 |
| СПОСОБ УСТАНОВЛЕНИЯ ЛИНИИ СВЯЗИ И СООТВЕТСТВУЮЩИЕ УСТРОЙСТВА ОТОБРАЖЕНИЯ | 2013 |
|
RU2599264C1 |
| ГИБКОЕ УСТРОЙСТВО ОТОБРАЖЕНИЯ И СООТВЕТСТВУЮЩИЙ СПОСОБ УПРАВЛЕНИЯ | 2013 |
|
RU2653303C2 |
| ГИБКОЕ УСТРОЙСТВО И СПОСОБ УПРАВЛЕНИЯ ИМ | 2013 |
|
RU2632413C2 |
| ГИБКОЕ УСТРОЙСТВО И СПОСОБЫ ЕГО РАБОТЫ | 2013 |
|
RU2667480C2 |
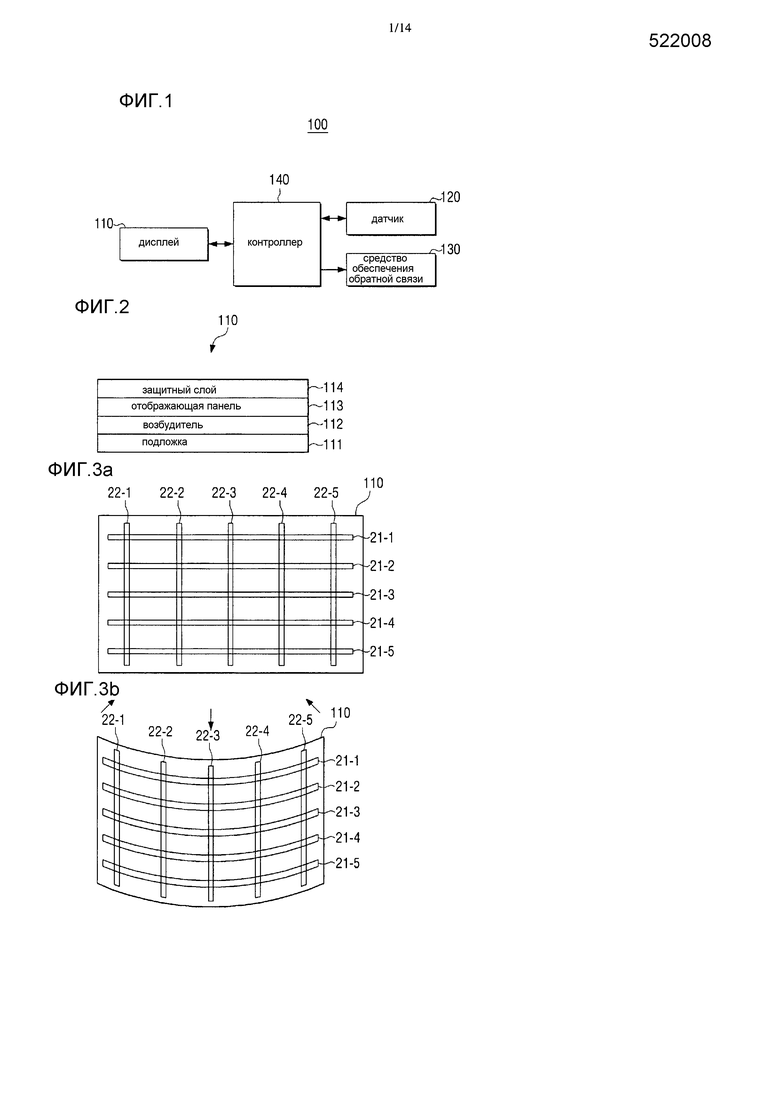
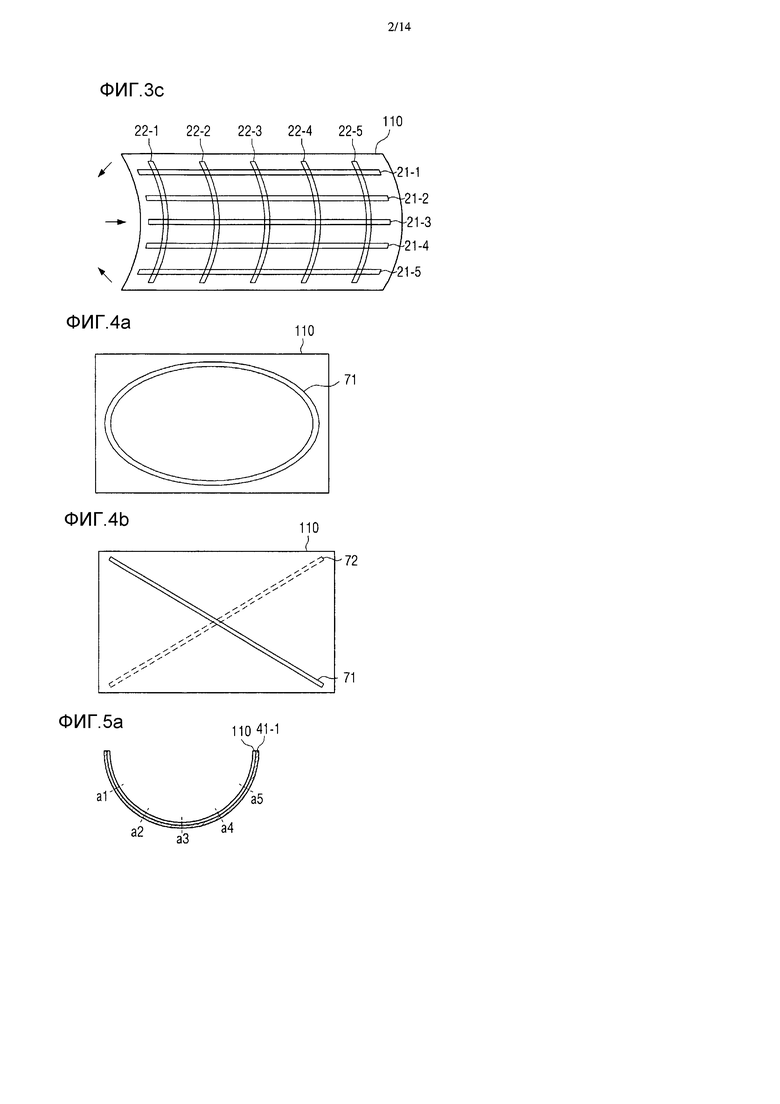
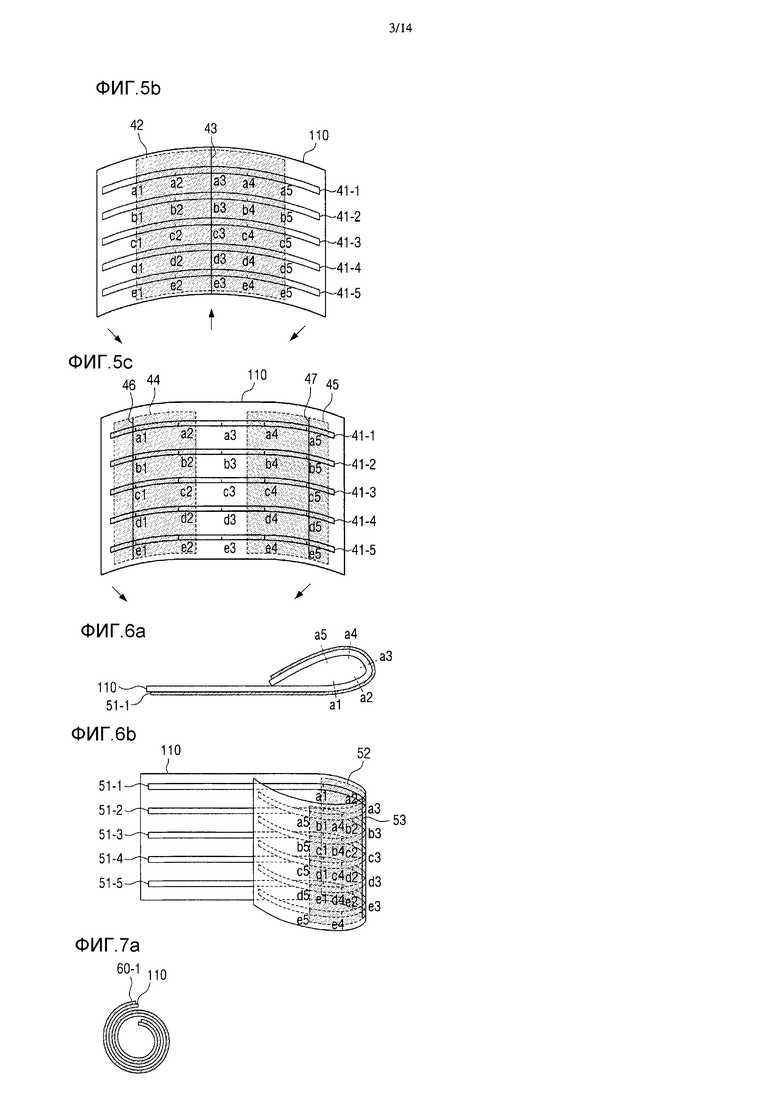
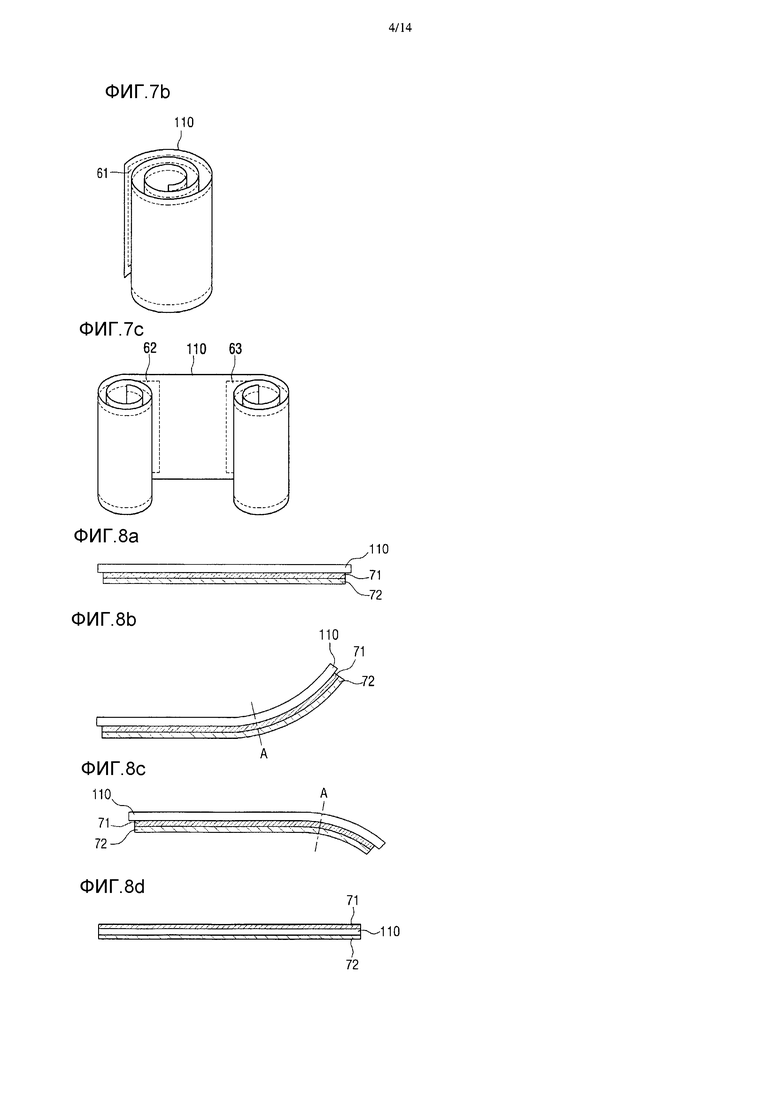
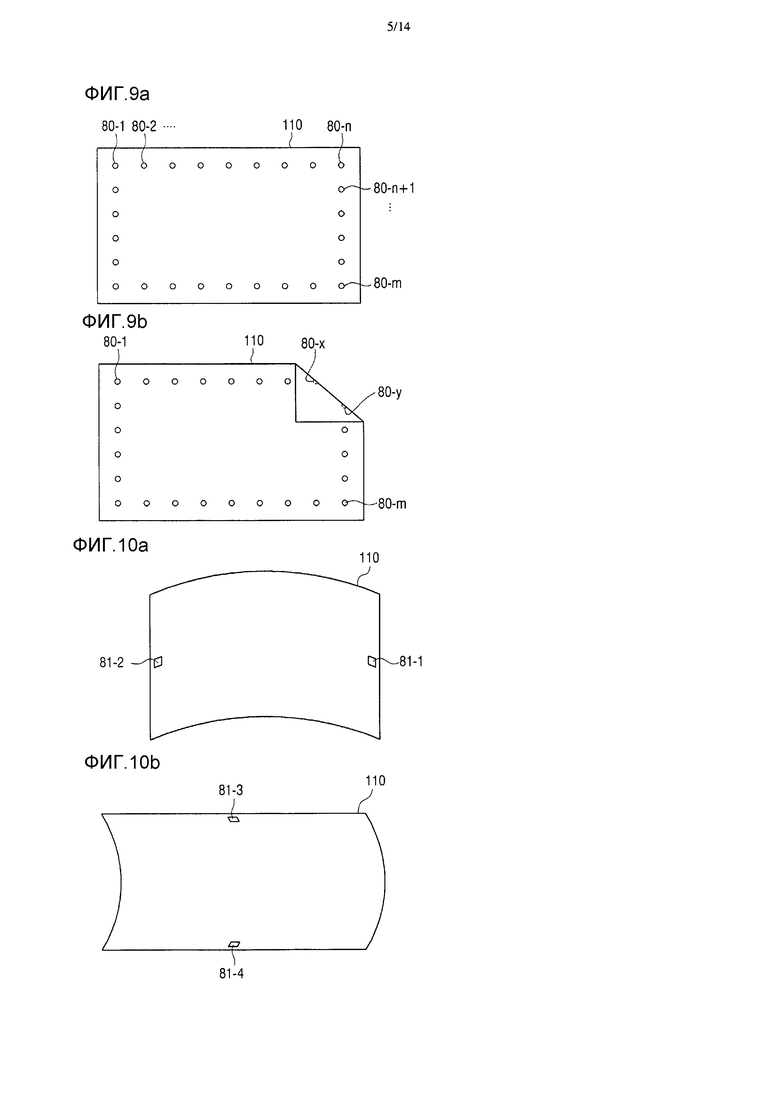
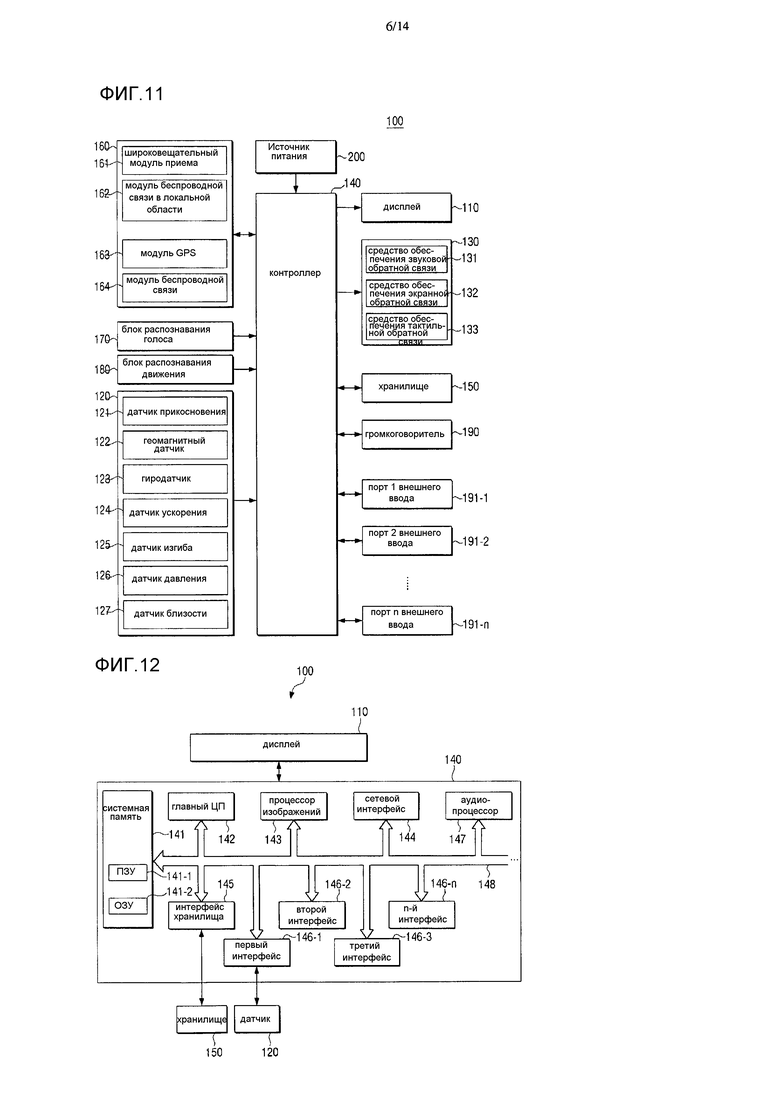
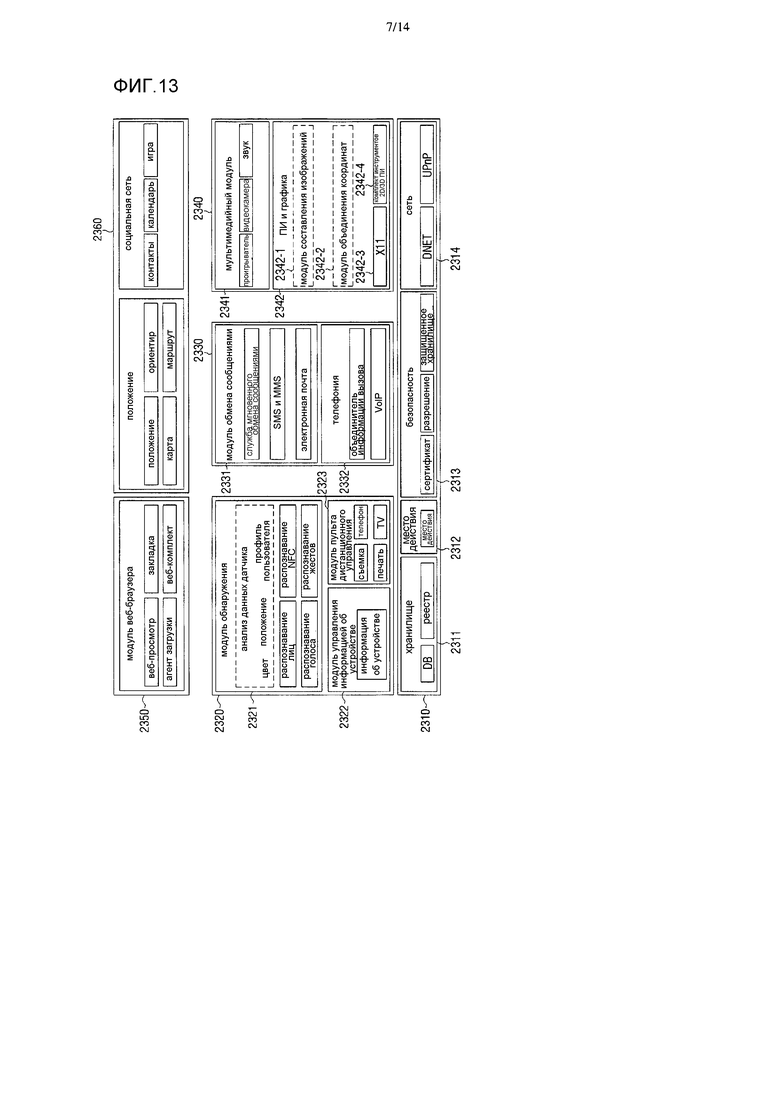
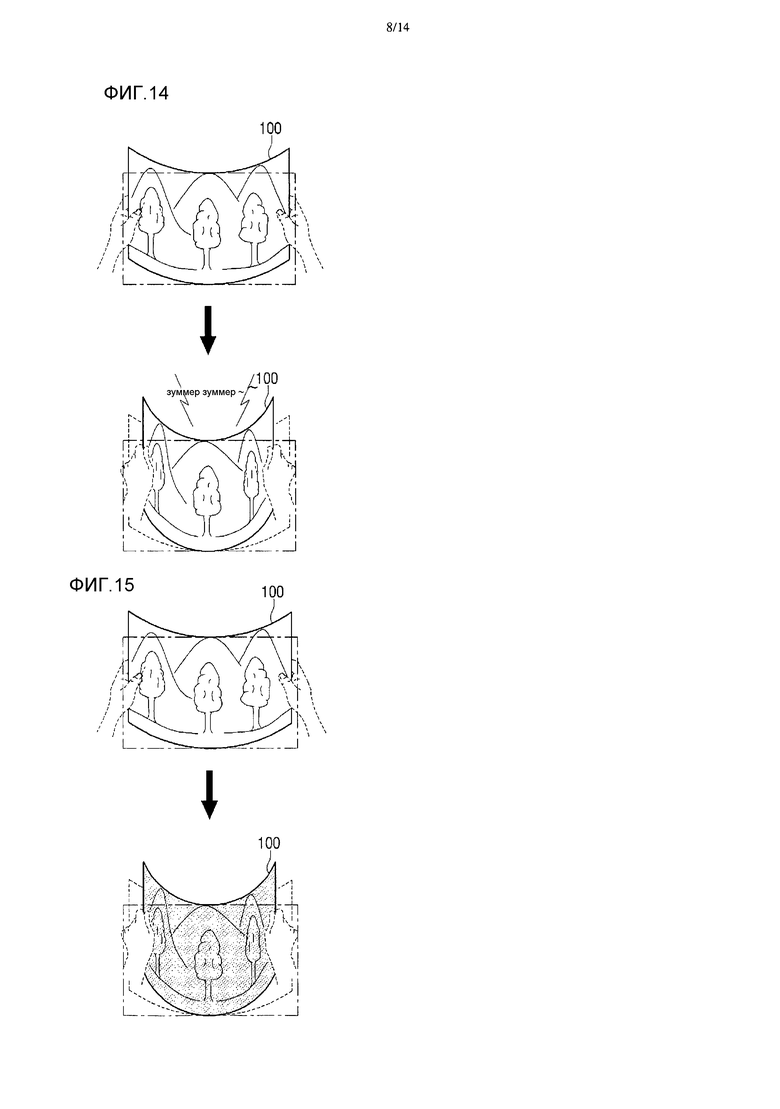
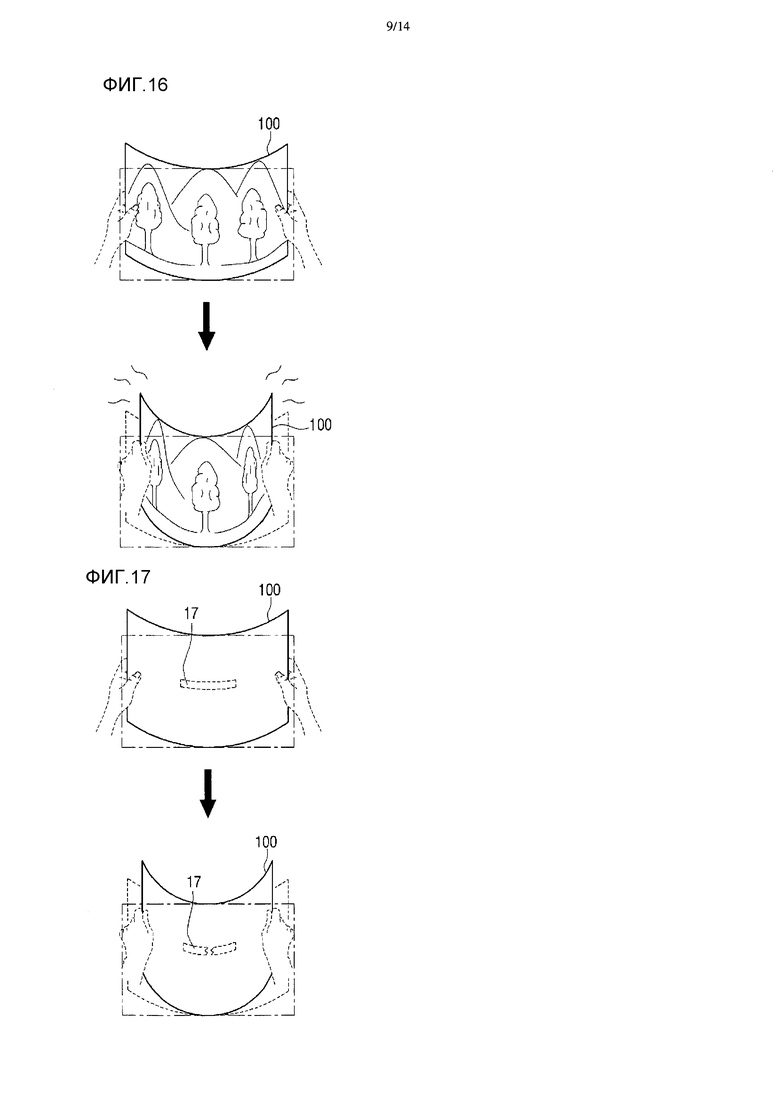
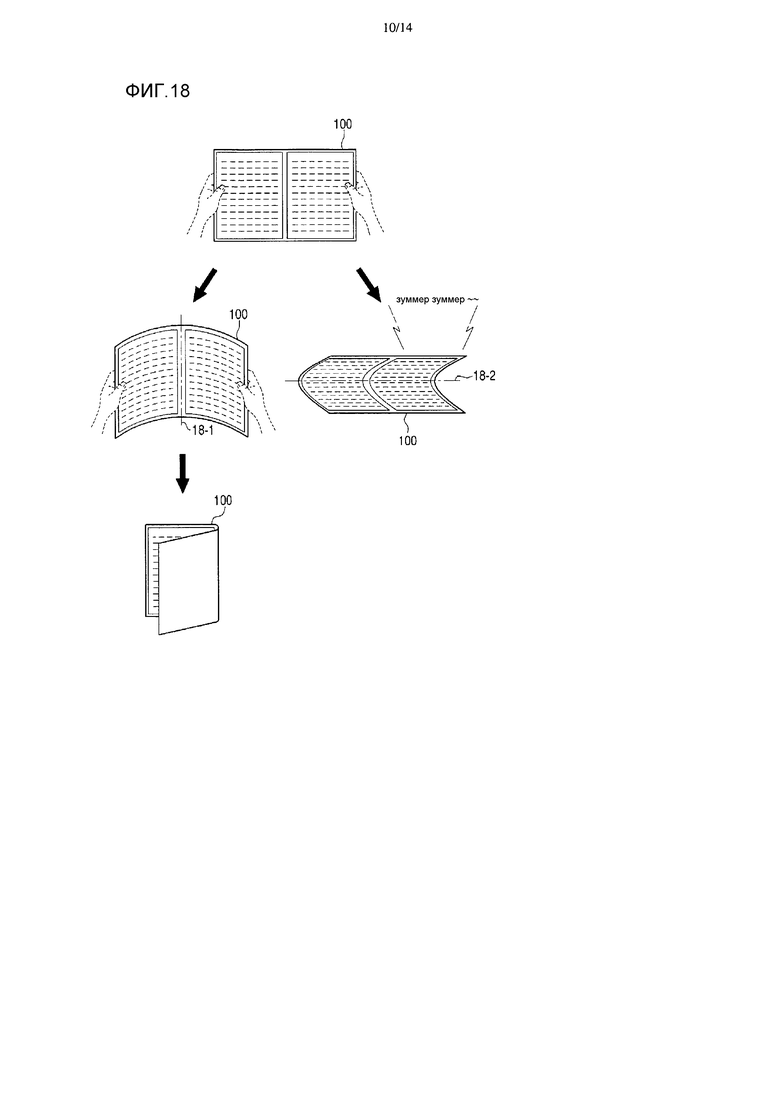
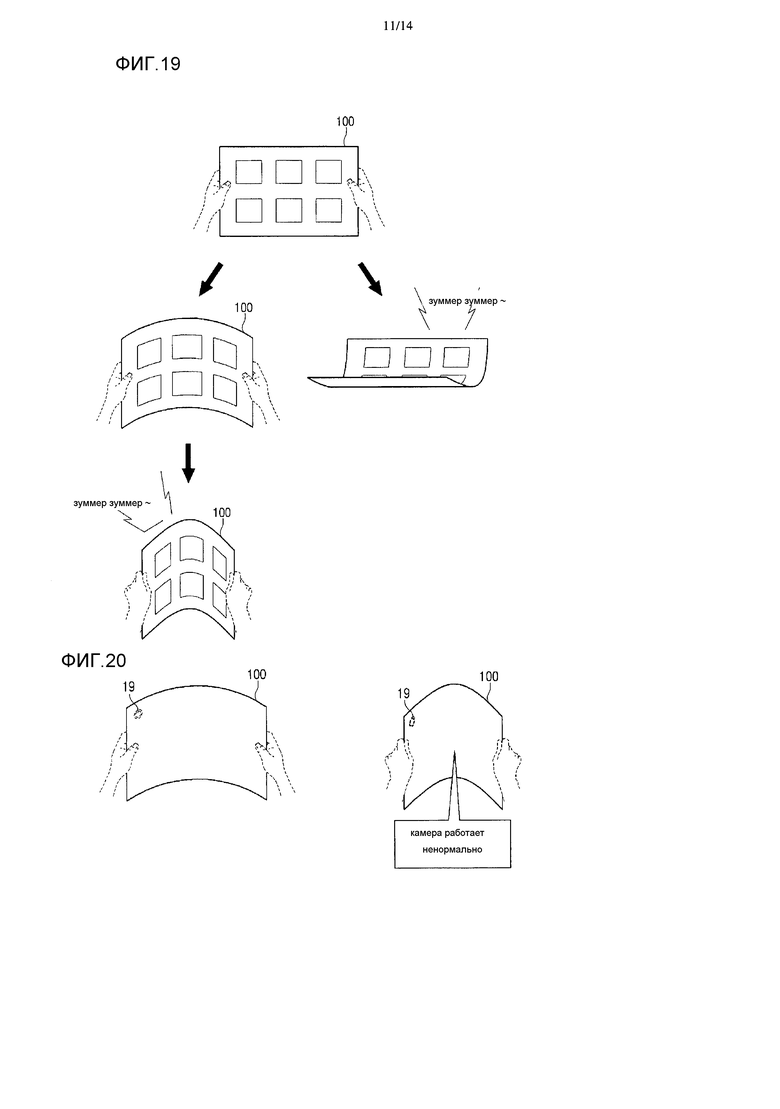
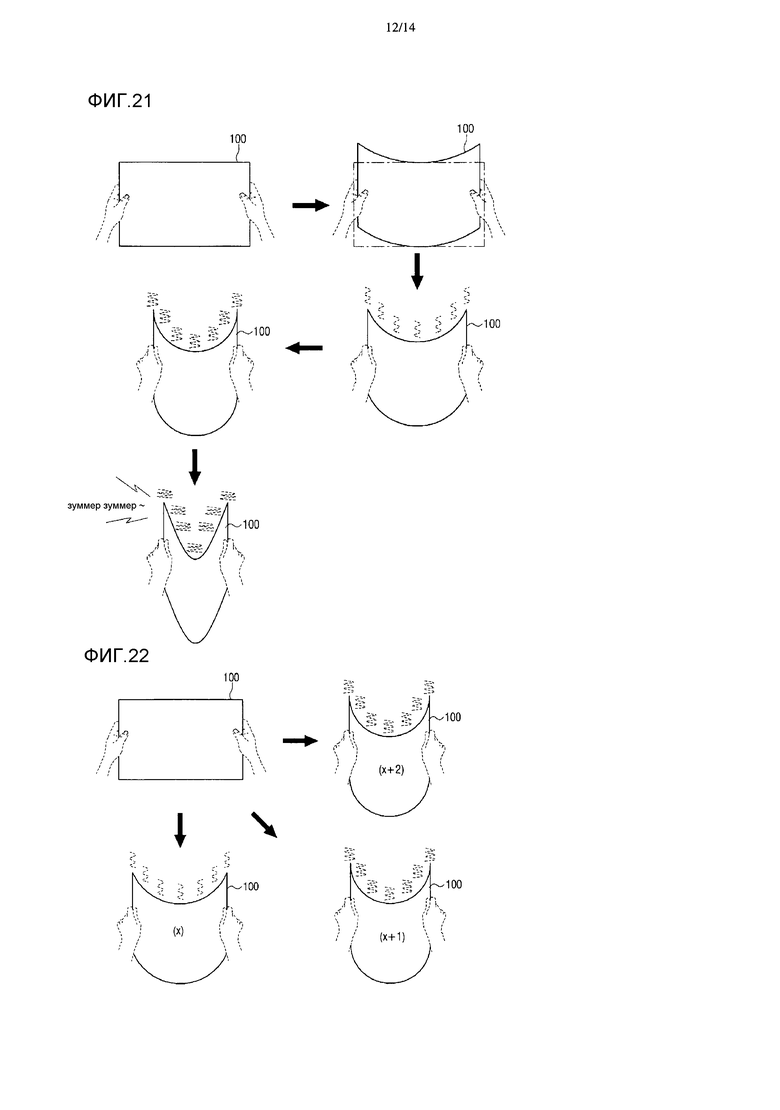
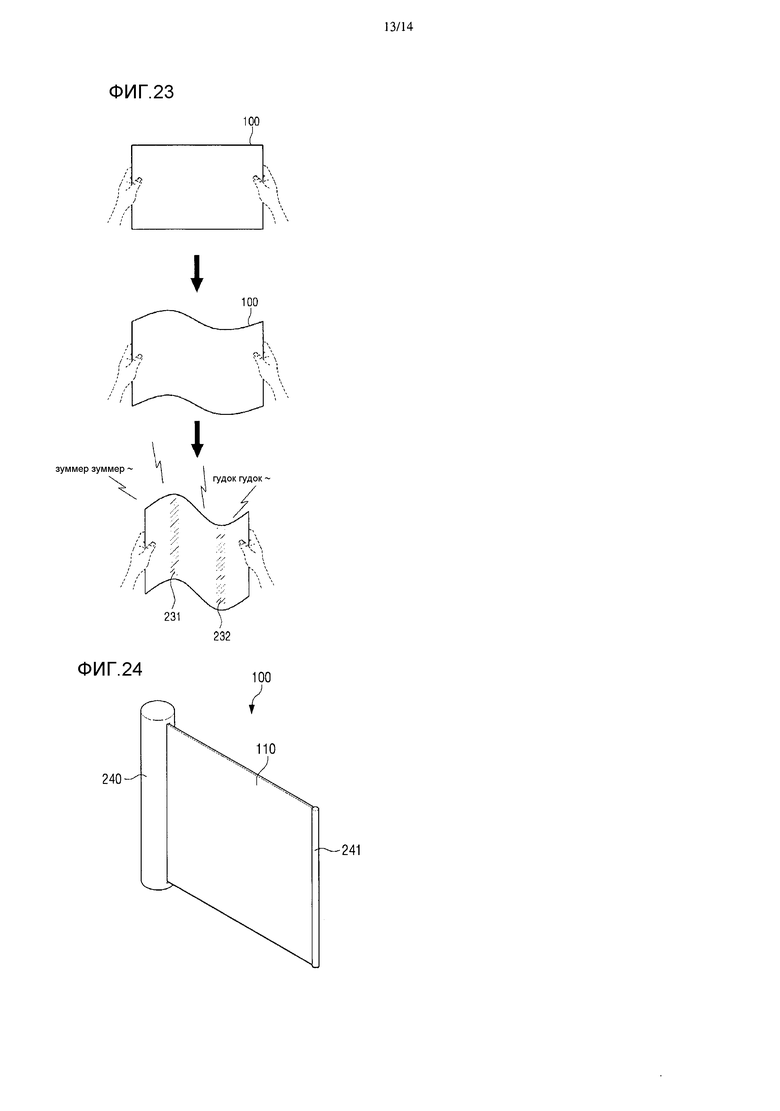
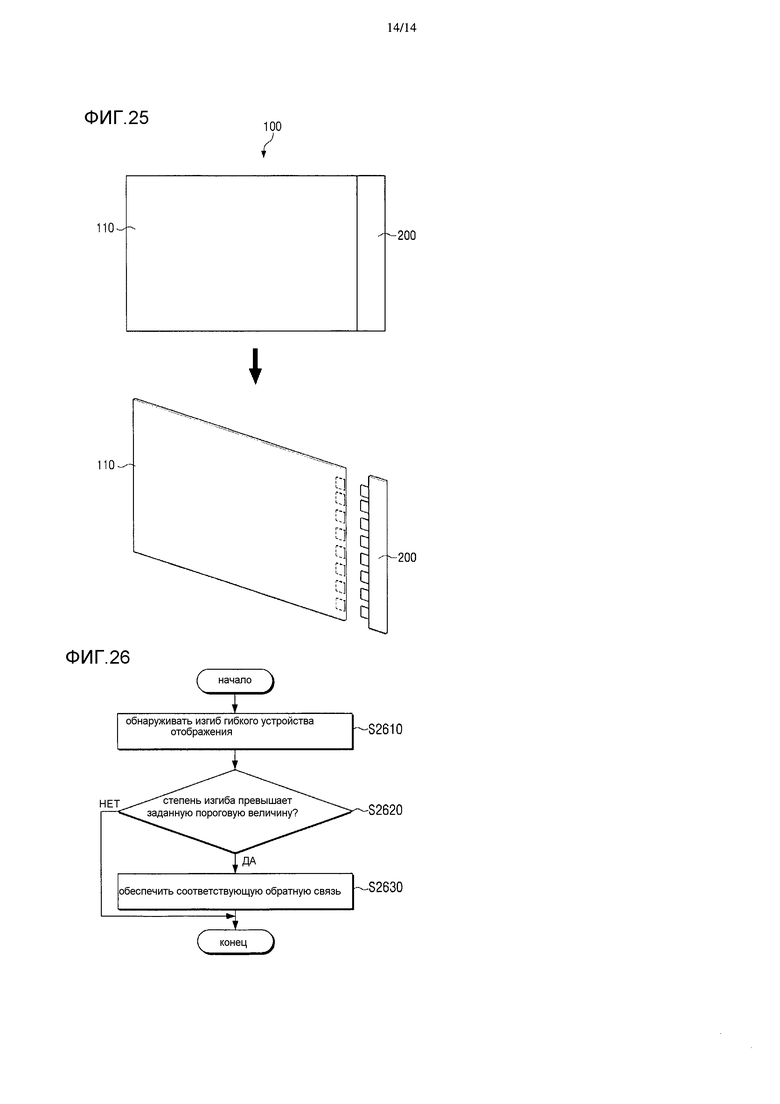
Изобретение относится к гибкому устройству отображения. Технический результат – обеспечение обратной связи с предупреждением о степени изгиба для исключения повреждения гибкого устройства. Гибкое устройство отображения включает в себя датчик, выполненный с возможностью обнаружения изгиба гибкого устройства отображения, средство обеспечения обратной связи, выполненное с возможностью обеспечения обратной связи согласно обнаруженному изгибу, и контроллер, выполненный с возможностью управления средством обеспечения обратной связи для обеспечения обратной связи, когда обнаруженная степень изгиба превышает пороговое значение. 3 н. и 12 з.п. ф-лы, 39 ил.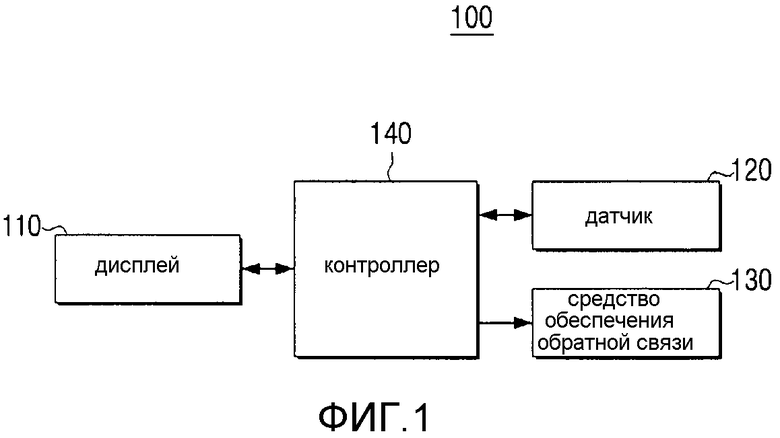
1. Гибкое устройство отображения, содержащее:
датчик, выполненный с возможностью обнаружения изгиба гибкого устройства отображения;
средство обеспечения обратной связи, выполненное с возможностью обеспечения обратной связи согласно обнаруженному изгибу; и
контроллер, выполненный с возможностью управления средством обеспечения обратной связи для обеспечения обратной связи, когда обнаруженная степень изгиба превышает пороговое значение и линия изгиба при изгибе гибкого устройства отображения формируется в первом направлении, и необеспечения обратной связи, когда линия изгиба при изгибе гибкого устройства отображения проходит во втором направлении, отличном от первого направления.
2. Гибкое устройство отображения по п. 1, дополнительно содержащее:
хранилище, выполненное с возможностью сохранения формы обеспечения обратной связи, заданной согласно степени изгиба,
причем контроллер управляет средством обеспечения обратной связи для обеспечения различной обратной связи согласно обнаруженной степени изгиба согласно форме обеспечения обратной связи, хранящейся в хранилище.
3. Гибкое устройство отображения по п. 1, дополнительно содержащее:
хранилище, выполненное с возможностью сохранения порогового значения, которое задано согласно области изгиба,
причем контроллер управляет средством обеспечения обратной связи для обеспечения обратной связи на области изгиба, где происходит изгиб, превышающий пороговое значение, с использованием порогового значения, которое задается по-разному согласно области изгиба и хранится в хранилище.
4. Гибкое устройство отображения по п. 1, в котором контроллер управляет средством обеспечения обратной связи для обеспечения обратной связи в положение, соответствующее области изгиба, согласно положению области изгиба, где происходит изгиб, превышающий пороговое значение.
5. Гибкое устройство отображения по п. 1, в котором, когда изгиб, превышающий пороговое значение, происходит повторно, контроллер отсчитывает повторения изгиба и управляет средством обеспечения обратной связи для обеспечения различной обратной связи согласно количеству повторений.
6. Гибкое устройство отображения по п. 1, дополнительно содержащее:
дисплей, выполненный с возможностью отображения экрана,
причем контроллер управляет средством обеспечения обратной связи для обеспечения по меньшей мере одного из экранной обратной связи для изменения состояния отображения экрана или для вывода графического сообщения, звуковой обратной связи для вывода предупреждающего звукового сигнала или голосового сообщения и тактильной обратной связи для формирования вибрации.
7. Гибкое устройство отображения по п. 6, в котором экранная обратная связь изменяет состояние отображения, изменяя по меньшей мере одно из цвета и яркости экрана или мигая экраном.
8. Гибкое устройство отображения по п. 1, дополнительно содержащее:
хранилище,
причем, когда обнаруженная степень изгиба превышает пороговое значение, контроллер сохраняет информацию, относящуюся к изгибу, в хранилище.
9. Гибкое устройство отображения по п. 8, дополнительно содержащее:
блок связи, выполненный с возможностью осуществления связи с сервером,
причем контроллер передает информацию, относящуюся к изгибу, на сервер и принимает услугу, относящуюся к изгибу, от сервера.
10. Гибкое устройство отображения по п. 8, в котором информация, относящаяся к изгибу, включает в себя информацию, относящуюся по меньшей мере к одному из положения изгиба, степени изгиба и количества изгибных манипуляций.
11. Гибкое устройство отображения по п. 8, в котором, когда изгиб, превышающий пороговое значение, обнаруживается сверх порогового числа раз, контроллер изменяет пороговое значение.
12. Гибкое устройство отображения по п. 1, в котором пороговое значение содержит радиус кривизны.
13. Гибкое устройство отображения, содержащее:
дисплей; и
элемент, выполненный с возможностью монтажа в части дисплея и содержащий коэффициент предельного напряжения,
причем, когда на части дисплея, в которой смонтирован элемент, совершается изгибная манипуляция, превышающая коэффициент предельного напряжения, элемент разрушается,
причем упомянутый элемент выполнен с возможностью его проверки для определения разрушенного состояния или неразрушенного состояния, причем разрушенное состояние указывает на то, что произошел чрезмерный изгиб, который может вызвать отказ, а неразрушенное состояние указывает на то, что чрезмерный изгиб не произошел.
14. Способ обеспечения обратной связи в гибком устройстве отображения, причем способ содержит этапы, на которых:
обнаруживают изгиб гибкого устройства отображения; и
обеспечивают обратную связь в соответствии с обнаруженным изгибом,
причем, когда степень обнаруженного изгиба превышает пороговое значение и линия изгиба при изгибе гибкого устройства отображения формируется в первом направлении, на этапе обеспечения обеспечивают обратную связь, а когда линия изгиба при изгибе гибкого устройства отображения проходит во втором направлении, отличном от первого направления, на этапе обеспечения не обеспечивают обратную связь.
15. Способ по п. 14, в котором в операции обеспечения обратной связи обеспечивается различная обратная связь согласно обнаруженной степени изгиба согласно предварительно сохраненной форме обеспечения обратной связи, которая задана согласно степени изгиба.
| Способ приготовления мыла | 1923 |
|
SU2004A1 |
| УСТРОЙСТВО ДЛЯ КОНТРОЛЯ ДЕФОРМАЦИИ И СПОСОБЫ ЕГО ИСПОЛЬЗОВАНИЯ В МЕХАНИЧЕСКИХ СТРУКТУРАХ, ПОДВЕРГАЮЩИХСЯ НАПРЯЖЕНИЮ | 1991 |
|
RU2110044C1 |
| Приспособление для суммирования отрезков прямых линий | 1923 |
|
SU2010A1 |
| Изложница с суживающимся книзу сечением и с вертикально перемещающимся днищем | 1924 |
|
SU2012A1 |
| Приспособление для суммирования отрезков прямых линий | 1923 |
|
SU2010A1 |
| СИСТЕМА И СПОСОБ ПРОГНОЗИРОВАНИЯ ОТКАЗА ЗАДНЕЙ ПОДСВЕТКИ ЖК-ДИСПЛЕЯ | 2007 |
|
RU2453929C2 |
| Устройство для рекламирования предметов | 1952 |
|
SU97678A1 |
| Способ приготовления лака | 1924 |
|
SU2011A1 |
| ТЕРМИНАЛ МОБИЛЬНОЙ СВЯЗИ И СПОСОБ УПРАВЛЕНИЯ ЕГО МЕНЮ | 2008 |
|
RU2412463C2 |

