Область техники, к которой относится изобретение
Изобретение относится к системам помощи водителю и системам активной безопасности для транспортных средств, в частности к системам расчета угла сцепки между транспортным средством и прицепом.
Уровень техники
Для большинства водителей движение задним ходом транспортного средства с прицепом является очень сложной задачей. Если угол сцепки между буксирующим транспортным средством и прицепом становится достаточно большим, это может привести к условиям для складывания. В связи с этим существует необходимость в системе, которая позволит точно определить угол сцепки между транспортным средством и прицепом.
Раскрытие изобретения
В соответствии с одним аспектом настоящего изобретения предложена система определения угла сцепки между транспортным средством и прицепом. Данная система включает в себя устройство формирования изображений, расположенное на прицепе. Первая навигационная система расположена в транспортном средстве. Вторая навигационная система встроена в устройство формирования изображений. Контроллер определяет угол сцепки на основании данных, полученных от первой навигационной системы и второй навигационной системы.
Устройство формирования изображений может представлять собой портативное электронное устройство.
Первая навигационная система для определения текущего положения и ориентации транспортного средства может включать в себя первый GPS-приемник или несколько первых инерциальных датчиков.
Вторая навигационная система для определения текущего положения и ориентации прицепа может включать в себя второй GPS-приемник или несколько вторых инерциальных датчиков.
В соответствии с другим аспектом настоящего изобретения предложена система определения угла сцепки между транспортным средством и прицепом, которая включает в себя первый GPS-приемник, расположенный в транспортном средстве, и портативное электронное устройство со вторым GPS-приемником, расположенное на прицепе. Контроллер определяет угол сцепки на основании данных, принятых от первого приемника и второго приемника.
Портативное электронное устройство может представлять собой смартфон или планшет и может быть прикреплено к задней конструкции прицепа и расположено таким образом, чтобы обеспечить захват видеоданных позади прицепа.
Первый GPS-приемник может быть выполнен с возможностью определять положение транспортного средства, а второй GPS-приемник выполнен с возможностью определять положение прицепа.
Контроллер может рассчитывать угол сцепки путем сравнения положения транспортного средства с положением прицепа. Для этого контроллер может содержать модуль обнаружения угла сцепки, выполненный с возможностью поочередно получать данные от первого GPS-приемника и от второго GPS-приемника. Модуль обнаружения угла сцепки может содержать фильтр Калмана, выполняющий экстраполяцию положения транспортного средства и положения прицепа на основании получаемых данных и после этого рассчитывающий угол сцепки на основании экстраполированного положения транспортного средства и экстраполированного положения прицепа.
В соответствии с еще одним аспектом настоящего изобретения предложена система определения угла поворота сцепки между транспортным средством и прицепом, содержащая устройство формирования изображений, расположенное на прицепе. В транспортном средстве предусмотрен по меньшей мере один первый инерциальный датчик, а по меньшей мере один второй инерциальный датчик встроен в устройство формирования изображений. Контроллер определяет угол сцепки на основании данных, полученных от первого инерциального датчика и второго инерциального датчика.
Второй инерциальный датчик может представлять собой трехосный гироскоп, трехосный акселерометр, трехосный магнитометр и/или барометр.
Первый инерциальный датчик может обнаруживать движение и/или поворот транспортного средства, а второй инерциальный датчик может обнаруживать движение и/или поворот прицепа.
Эти и другие аспекты, цели и отличительные особенности настоящего изобретения станут понятны специалистам в данной области техники после ознакомления со следующим описанием, формулой изобретения и сопроводительными чертежами.
Краткое описание чертежей
На данных чертежах представлено следующее.
На Фиг. 1 представлена схема расположения устройств формирования изображений на транспортном средстве или прицепе, подсоединенном к транспортному средству.
На Фиг. 2 представлено устройство формирования изображений согласно одному варианту осуществления изобретения.
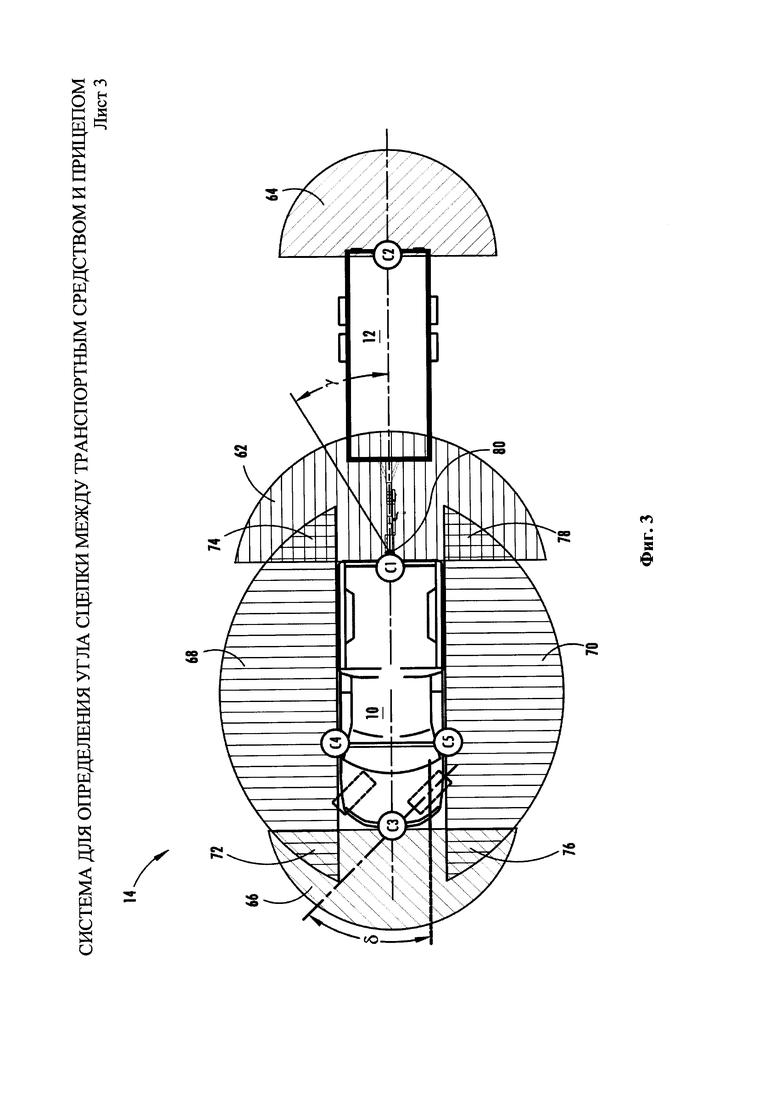
На Фиг. 3 представлен вид сверху транспортного средства, к которому подсоединен прицеп, где проиллюстрировано расположение нескольких зон обзора, соответствующих устройствам формирования изображений.
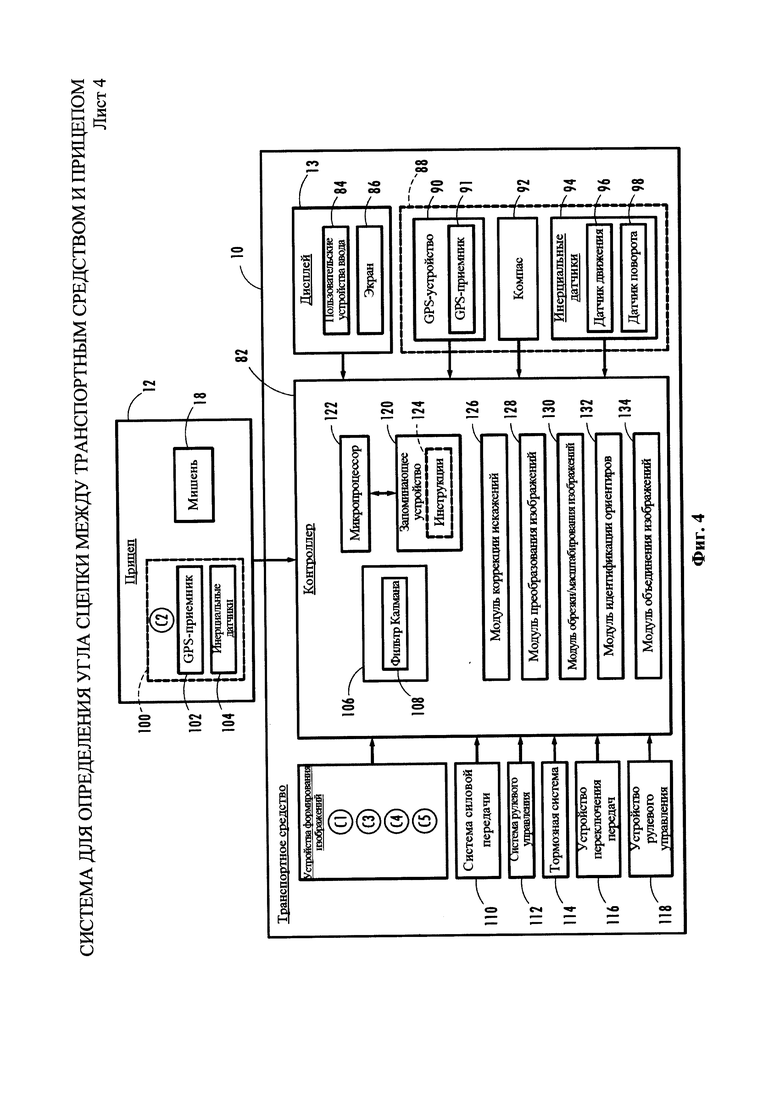
На Фиг. 4 представлена блок-схема контроллера, подключенного к устройствам формирования изображений и другому оборудованию.
Осуществление изобретения
Далее представлено подробное описание вариантов осуществления изобретения. Однако следует понимать, что описанные варианты приведены исключительно в качестве примеров, которые могут быть воплощены в различных и альтернативных формах. Фигуры необязательно представлены во всех подробностях, а некоторые элементы могут быть увеличены или уменьшены с целью показать общее функционирование. Конкретные конструкционные и функциональные подробности, изложенные в данном описании, не должны рассматриваться как ограничение и приведены лишь в качестве иллюстрации для ознакомления специалистов в данной области техники с вариантами реализации изобретения.
В настоящем документе термин «и/или» при перечислении двух или более элементов используется для обозначения того, что любой указанный элемент может быть использован как отдельно, так и в комбинации с двумя или более указанными элементами. Например, если написано, что в состав входят компоненты А, В и/или С, то состав может включать в себя только А; только В; только С; сочетание А и В; сочетание А и С; сочетание В и С; или сочетание А, В и С.
Движение задним ходом и маневрирование могут представлять собой сложную задачу из-за плохой видимости и трудно прогнозируемой траектории движения. Проблемы могут быть разными в зависимости от габаритов транспортного средства, габаритов прицепа и условий окружающей среды. Для больших прицепов может быть полностью перекрыт обзор области позади прицепа. Для прицепов меньших размеров незначительное изменение угла поворота руля может привести к быстрому отклонению угла сцепки между сцепным устройством и прицепом. Учитывая эти и другие проблемы, предлагаемые усовершенствования обеспечивают различные варианты для расширения функциональности системы помощи при движении задним ходом с прицепом.
Как показано на Фиг. 1, устройства C1-С5 формирования изображений могут быть установлены в различных местах таким образом, чтобы каждая зона обзора устройств С1-С5 могла захватывать разную область рабочего пространства 14. Каждое из устройств С1-С5 может представлять собой любое устройство формирования изображений, выполненное с возможностью захвата видеоданных, таких как, без ограничения перечисленным, прибор с зарядовой связью (ПЗС) и датчик изображений на комплементарной структуре металл-оксид-полупроводник (КМОП). Хотя на Фиг. 1 показано пять устройств С1-С5 формирования изображений, их количество может различаться в зависимости от конкретных условий работы конкретных используемых устройств и пропорций и/или внешних форм конкретного транспортного средства и прицепа. Например, для крупногабаритных транспортных средств и прицепов могут потребоваться дополнительные устройства формирования изображений для захвата видеоданных, соответствующих большему рабочему пространству. Устройства формирования изображений также могут отличаться по углу обзора и размерам зоны обзора в зависимости от конкретного сочетания транспортного средства и прицепа.
Устройства формирования изображений C1, С3, С4 и С5 расположены на транспортном средстве 10, и каждое из них ориентировано таким образом, чтобы иметь зону обзора, направленную в по существу различные области рабочего пространства 14. Устройство C1 расположено по центру на задней части 16 (например, на задней двери) транспортного средства 10 и может применять технологию обнаружения объектов для наблюдения за положением мишени 18, расположенной на прицепе 12 так, чтобы можно было определить угол сцепки γ между транспортным средством 10 и прицепом 12. В соответствии с настоящим описанием углом сцепки γ считается угол между продольной центральной осью 20 транспортного средства 10 и продольной центральной осью 22 прицепа 12. В дополнение или в качестве альтернативы устройству C1 устройство С1' формирования изображений может быть расположено на обращенной назад части 24 транспортного средства 10 рядом с крышей 26.
Устройство формирования изображений С3 расположено по центру на обращенной вперед части 28 транспортного средства 10 рядом с областью 30 радиаторной решетки. Дополнительно к устройству С3 формирования изображений или вместо него на обращенной вперед части 32 транспортного средства рядом с крышей 26 может быть расположено устройство С3'. Устройства C1 (и/или С1') и С3 (и/или С3') ориентированы таким образом, чтобы их зоны обзора охватывали по существу все рабочее пространство 14 перед транспортным средством 10 и за ним.
Устройства формирования изображений С4 и С5 расположены на пассажирской стороне 34 и водительской стороне 36, соответственно, и выполнены с возможностью захвата видеоданных, соответствующих рабочему пространству 14 по бокам от транспортного средства 10. В некоторых вариантах воплощения устройство С4 расположено рядом с боковым зеркалом 38 с пассажирской стороны, а устройство С5 расположено рядом с боковым зеркалом 40 с водительской стороны. Устройства С4 и С5 вместе с устройствами C1 и С3 выполнены с возможностью захватывать видеоданные, относящиеся к практически всему рабочему пространству 14 вокруг транспортного средства 10. Однако во время буксировки прицепа 12 транспортным средством прицеп 12 может перекрывать значительную часть заднего обзора из транспортного средства 10.
Устройство формирования изображений С2 может быть выполнено с возможностью взаимодействия с устройствами C1 и С3-С5 для получения изображения объединенного рабочего пространства 14 вокруг транспортного средства 10 и прицепа 12. Устройство С2 может быть расположено на задней конструкции 42 прицепа 12. Устройство С2 может быть расположено по центру в верхней части 44 прицепа 12 и иметь направленную назад зону обзора относительно прицепа 12. В зависимости от типа и геометрической формы прицепа устройство С2 может быть расположено в различных местах. В различных вариантах устройство С2 может иметь обращенную по существу назад зону обзора, обеспечивающую возможность захвата видеоданных, соответствующих рабочему пространству 14, которые могут быть не охвачены устройствами C1 и С3-С5 из-за наличия прицепа 12.
На Фиг. 2 представлено устройство С2, показанное, в соответствии с одним вариантом реализации, в виде портативного электронного устройства 46 с встроенной камерой 48 и соответствующими настройками захвата изображений. Портативное электронное устройство 46 может представлять собой интеллектуальное устройство, такое как, без ограничения, смартфон или планшет. Как показано на чертеже, портативное электронное устройство 46 находится в корпусе 50, прикрепленном к задней конструкции 42 прицепа 12. Корпус 50 может быть изготовлен из прозрачного твердого материала (например, из пластика), чтобы позволить портативному электронному устройству 46 точно захватывать видеоданные позади прицепа 12. Портативное электронное устройство 46 может опираться в корпусе 50 на подставку 52 и/или другую опорную конструкцию и может питаться с помощью зарядного кабеля 54, электрически соединенного с электрической системой прицепа 12. Портативное электронное устройство 46 может иметь встроенную навигационную систему 56, включающую в себя GPS-приемник 58 для обеспечения выполнения GPS-функций и/или один или несколько встроенных инерциальных датчиков 60, которые могут представлять собой трехосные гироскопы, трехосные акселерометры, трехосные магнитометры и/или барометры и т.д. или их комбинации. Видеоданные от камеры 48 могут передаваться вместе с данными от GPS-приемника 58 и/или инерциальных датчиков 60 в систему транспортного средства по проводному или беспроводному (например, Bluetooth®) соединению. Хотя в приведенном выше примере устройство С2 было описано как портативное электронное устройство 46, данный пример не должен рассматриваться как ограничение. Кроме того, следует понимать, что устройства формирования изображений C1 и С3-С5 также могут быть реализованы в виде портативных электронных устройств, что также не является ограничением.
На Фиг. 3 представлен схематический вид сверху транспортного средства 10, к которому присоединен прицеп 12, и показано несколько зон обзора устройств формирования изображений С1-С5. В показанном варианте устройство C1 имеет зону обзора 62, устройство С2 имеет зону обзора 64, устройство С3 имеет зону обзора 66, устройство С4 имеет зону обзора 68, а устройство С5 имеет зону обзора 70. В данном варианте осуществления горизонтальный угол обзора каждой из зон обзора 62, 64 и 66 составляет около 170 градусов или более, а каждое устройство C1, С2 и С3 может захватывать видеоданные, соответствующие продольным направлениям относительно транспортного средства 10 с прицепом 12. Устройства С4 и С5 могут захватывать видеоданные, соответствующие рабочему пространству с каждой стороны от транспортного средства 10 с прицепом 12, и имеют соответствующие зоны обзора 68 и 70 с углами обзора около 170 градусов или более. Как показано на чертеже, зона обзора 68 может образовывать пересекающуюся область 72 с зоной обзора 66 и пересекающуюся область 74 с зоной обзора 62. Аналогичным образом, зона обзора 70 может также формировать пересекающуюся область 76 с зоной обзора 66 и пересекающуюся область 78 с зоной обзора 62. Хотя это и не показано, каждая из зон обзора 62, 68 и 70 также может формировать пересекающиеся области с зоной обзора 64. В некоторых вариантах осуществления пересекающиеся области могут быть объединены для формирования расширенного вида транспортного средства 10 и прицепа 12 или вида с высоты. Устройства С1-С5 могут захватывать видеоданные, соответствующие объектам и местности в окружающем рабочем пространстве 14 транспортного средства 10 и прицепа 12.
В различных описываемых здесь вариантах осуществления каждая из зон обзора 62-70 может быть объединена с любым набором других зон обзора для формирования расширенных зон обзора и увеличения углов обзора на основании рабочих состояний и относительных ориентаций транспортного средства 10 и прицепа 12. Рабочие состояния и относительные ориентации транспортного средства 10 и прицепа 12 могут быть определены из направления транспортного средства 10, скорости движения транспортного средства 10, угла δ поворота рулевого колеса и угла сцепки γ между транспортным средством 10 и прицепом 12. В некоторых вариантах зоны обзора 62-70 также могут быть объединены для формирования составного изображения транспортного средства 10 с прицепом 12 с высоты птичьего полета. Информация, относящаяся к рабочему состоянию и ориентации транспортного средства 10 относительно прицепа 12, также может быть использована для создания смоделированного вида транспортного средства 10 с прицепом 12 с высоты птичьего полета, на котором будет виден угол сцепки γ относительно точки 80.
Различные виды транспортного средства 10 и прицепа 12, как рассмотрено в настоящем документе, могут быть сгенерированы и отображены контроллером на дисплее 13 так, чтобы оператор транспортного средства 10 мог обозревать информацию, относящуюся к транспортному средству 10, прицепу 12 и окружающему рабочему пространству 14. Дисплей 13 может быть реализован в транспортном средстве 10 в виде монитора на центральной консоли, дисплея зеркала заднего вида, монитора на приборной панели, дисплея на лобовом стекле или любого другого устройства, способного отображать обработанные видеоданные, полученные с помощью устройств формирования изображений С1-С5. Видеоданные от устройств С1-С5 могут представлять собой необработанные изображения, изображения от камеры с исправлением аберрации, составные видеоданные или любые другие формы видеоданных, захваченных устройствами С1-С5 или любыми другими устройствами формирования изображений.
На Фиг. 4 представлена блок-схема контроллера 82. Контроллер 82 может быть объединен или может коммуницировать с системой помощи при движении задним ходом с прицепом. Контроллер 82 может получать и обрабатывать видеоданные от устройств формирования изображений С1-С5 для генерирования различных видов, отображаемых на дисплее 13. Дисплей 13 может иметь несколько средств 84 ввода данных пользователем, чтобы обеспечить получение контроллером 82 информации о выборе, сделанном оператором транспортного средства 10. Дисплей 13 также может иметь экран 86 для показа одного или нескольких видов, которые могут быть выбраны оператором и/или генерироваться автоматически. В соответствии с одним вариантом осуществления экран 86 может представлять собой сенсорный экран, способный обнаруживать одно или несколько прикосновений. Экран 86 может использовать резистивное считывание, емкостное считывание, считывание поверхностных акустических волн или любые другие чувствительные средства, способные регистрировать одиночные или множественные прикосновения для ввода различных пользовательских команд в систему помощи при движении задним ходом с прицепом.
Контроллер 82 также может обмениваться данными с первой навигационной системой 88, включающей в себя GPS-устройство 90, компас 92 и один или несколько инерциальных датчиков 94, каждый из которых может входить в уже имеющееся оборудование транспортного средства 10. GPS-устройство 90 может включать в себя GPS-приемник 91 и может использоваться для определения глобального местоположения и локализации транспортного средства 10 и передачи информации о местоположении и локализации на контроллер 82. Компас 92 может быть использован для определения направления транспортного средства 10 относительно географического направления по компасу и передачи данных о направлении на контроллер 82. Инерциальные датчики 94 могут быть использованы для обнаружения движения и поворота транспортного средства 10. Они могут включать в себя один или несколько датчиков движения 96 (например, акселерометр) и датчиков поворота 98 (например, гироскоп).
Контроллер 82 также может обмениваться данными со второй навигационной системой 100, которая может включать в себя GPS-приемник 102 и один или несколько инерциальных датчиков 104. В соответствии с одним вариантом осуществления изобретения GPS-приемник 102 встроен в устройство формирования изображений С2. По выбору, инерциальные датчики 104 также могут быть встроены в устройство С2, которое может быть выполнено в виде портативного электронного устройства 46, показанного на Фиг. 2. Однако следует понимать, что устройство С2 может представлять собой элемент оборудования, имеющий специальное назначение, который прикреплен к прицепу 12. Кроме того, GPS-приемник 102 и инерциальные датчики 104 могут быть предусмотрены еще и в других местах на прицепе 12 и могут быть объединены с другим оборудованием и/или конструкциями на прицепе 12.
GPS-приемник 102 может функционировать с возможностью определения глобального местоположения и локализации прицепа 12 и передачи информации о местоположении и локализации на контроллер 82. Инерциальные датчики 104 могут функционировать с возможностью обнаружения движения и поворота прицепа 12 и могут включать в себя любые конфигурации датчиков, рассмотренные в настоящем документе. Благодаря наличию навигационной системы 100 на прицепе 12, угол сцепки γ между транспортным средством 10 и прицепом 12 может быть определен без необходимости распознавания метки на основании изображений. Данный подход также позволяет оператору избежать необходимости прикреплять метку (например, метку 18) к прицепу 12 или выполнять измерения транспортного средства/прицепа для настройки системы обнаружения метки на основании изображений.
В соответствии с одним вариантом осуществления контроллер 82 может рассчитывать угол сцепки γ, сравнивая позицию транспортного средства с позицией прицепа, используя данные о позиции транспортного средства, полученные от GPS-приемника 91, и данные о позиции прицепа, полученные от GPS-приемника 102. В другом варианте контроллер 82 может включать в себя модуль 106 детекции угла сцепки, способный поочередно принимать данные о позиции транспортного средства от GPS-приемника 91 и данные о позиции прицепа от GPS-приемника 102. Модуль 106 может содержать фильтр Калмана 108 для сглаживания и экстраполяции позиции транспортного средства и позиции прицепа на основании данных о позиции транспортного средства и данных о позиции прицепа, а также рассчитывающий угол сцепки γ на основании экстраполированной позиции транспортного средства и экстраполированной позиции прицепа. В еще одном варианте контроллер 82 может вычислять угол сцепки γ на основании данных, принятых от инерциальных датчиков 94 транспортного средства 10 и инерциальных датчиков 104 прицепа 12. Например, инерциальные датчики 94 и 104 могут передавать на контроллер 82 данные о мгновенном направлении транспортного средства и мгновенном направлении прицепа, соответственно, которые контроллер 82 может использовать для расчета угла сцепки γ. В еще одном варианте контроллер 82 может использовать позиционные данные для транспортного средства 10 в качестве опорного значения для расчета дифференциальных смещений позиции для прицепа 12, и наоборот. Данный подход может дать в результате более точные расчеты положения транспортного средства 10 относительно прицепа 12, приводя к получению более точного значения угла сцепки γ. Следует понимать, что все описанные выше варианты осуществления могут быть реализованы по отдельности или объединены друг с другом.
На Фиг. 4 также показано, что контроллер 82 может обмениваться данными с одной или несколькими системами транспортного средства, показанными как система 110 силовой передачи, система 112 рулевого управления, тормозная система 114 и устройство 116 переключения передач (PRDNL). Система 110 силовой передачи вместе с системой 112 рулевого управления, тормозной системой 114 и устройством 116 переключения передач позволит обеспечить управление транспортным средством 10 и прицепом 12 при движении задним ходом. В соответствии с одним вариантом осуществления контроллер 82 может отправлять инструкции на любую из указанных систем - систему 110 силовой передачи, систему 112 рулевого управления, тормозную систему 114 и устройство 116 переключения передач, на основании входных данных, полученных от устройства 118 рулевого управления, которые могут содержать информацию, задающую траекторию движения транспортного средства 10 и прицепа 12. Устройство 118 рулевого управления может быть выполнено в виде поворотного устройства (например, ручки, рулевого колеса), которое позволяет оператору транспортного средства 10 осуществлять рулевое управление транспортным средством 10 во время маневра заднего хода.
Контроллер 82 может содержать запоминающее устройство 120 (память), соединенное с одним или несколькими процессорами 122 для выполнения инструкций 124, хранящихся на запоминающем устройстве 120. Запоминающее устройство 120 с инструкциями 124 образует пример энергонезависимого машиночитаемого носителя. Контроллер 82 также может иметь несколько модулей для объединения изображений, полученных от устройств формирования изображений С1-С5, со снимками со спутника (например, от GPS-устройства 90) для формирования различных составных видов рабочего пространства 14 вокруг транспортного средства 10 и прицепа 12. Данные модули могут включать в себя модуль 126 коррекции искажений, модуль 128 преобразования изображений, модуль 130 обрезки/масштабирования изображений, модуль 132 идентификации ориентиров и модуль 134 компоновки изображений.
Для формирования составного изображения, скомпонованного из видеоданных от двух или нескольких устройств формирования изображений С1-С5, контроллер 82 может получать видеоданные от устройств С1-С5 и корректировать любые искажения видеоданных с помощью модуля 126 коррекции искажений. Искажения видеоданных могут быть вызваны дисторсией линзы, коррекцией точки обзора или любым другим источником искажений, присущим устройствам формирования изображений. Модуль 128 преобразования изображений может изменять точку обзора видеоданных. Коррекция точки обзора может соответствовать изменению ориентации перспективы видеоданных, соответствующей зоне обзора устройства формирования изображений. Например, из вида сбоку может быть получен вид с высоты птичьего полета. Видеоданные от каждого из двух или более устройств формирования изображений могут быть затем обрезаны и масштабированы с помощью модуля 130 обрезки/масштабирования изображений и объединены в модуле 134 компоновки изображений. Составные изображения, генерируемые модулем 134 компоновки изображений, могут формировать расширенную зону обзора, вид с высоты птичьего полета или любую комбинацию видеоданных, полученных от устройств С1-С5.
В некоторых вариантах осуществления относительная локализация видеоданных, полученных от двух или более устройств формирования изображений, затем может быть выровнена с помощью модуля 132 идентификации ориентиров. Модуль 132 идентификации ориентиров может функционировать с возможностью обнаружения и идентификации объектов на видеоданных, принятых от устройств С1-С5, а также использования объектов в различных областях обзора для выравнивания и точной компоновки изображений. Модуль 134 компоновки изображений также может быть способен идентифицировать загороженные и/или отсутствующие участки на видеоданных и может запрашивать снимки со спутника или другие данные с помощью GPS-устройства 90 для дополнения и уточнения составного изображения. Затем полученное составное изображение может быть выведено на экран 86 для отображения оператору транспортного средства 10.
Рассмотренные в настоящем документе системы и способы позволяют усовершенствовать систему помощи при движении задним ходом с прицепом. Хотя описанные и изображенные системы и способы рассматриваются со ссылкой на конкретное транспортное средство и прицеп, следует понимать, что в соответствии с настоящим изобретением описанные системы и способы могут быть использованы для любого сочетания транспортного средства и прицепа.
Следует понимать, что в описанную выше конструкцию могут быть внесены различные вариации и модификации без отступления от сущности настоящего изобретения, которая задана следующей формулой изобретения, если явно не указано иное.
| название | год | авторы | номер документа |
|---|---|---|---|
| КОМПОНЕНТ ОПРЕДЕЛЕНИЯ УГЛА СЦЕПКИ С ПОДСВЕТКОЙ | 2016 |
|
RU2721451C2 |
| ЛЮМИНЕСЦЕНТНЫЙ КОМПОНЕНТ ВЫЯВЛЕНИЯ УГЛА СЦЕПНОГО УСТРОЙСТВА | 2016 |
|
RU2724477C2 |
| СИСТЕМА И СПОСОБ ПОМОЩИ ВОДИТЕЛЮ ТРАНСПОРТНОГО СРЕДСТВА С ПРИЦЕПОМ | 2014 |
|
RU2574042C1 |
| СПОСОБ И СИСТЕМА ДЛЯ КОНТРОЛЯ РАЗМЕЩЕНИЯ МЕТКИ НА ПРИЦЕПЕ ТРАНСПОРТНОГО СРЕДСТВА | 2014 |
|
RU2574505C1 |
| СИСТЕМА И СПОСОБ КОНТРОЛЯ СОЕДИНЕНИЯ ТРАНСПОРТНОГО СРЕДСТВА С ПРИЦЕПОМ | 2014 |
|
RU2573691C1 |
| Беспилотный аппарат и комплекс наблюдения для него | 2016 |
|
RU2642202C1 |
| СИСТЕМА ДЛЯ ОБНАРУЖЕНИЯ ТРАНСПОРТНОГО СРЕДСТВА | 2014 |
|
RU2574383C2 |
| НАВИГАЦИОННАЯ СИСТЕМА (ВАРИАНТЫ) | 2004 |
|
RU2383056C2 |
| Система бесключевого доступа к транспортному средству с дополнительной защитой от угона (PKES-плюс, варианты) | 2021 |
|
RU2763613C1 |
| Способ разведки ледовой обстановки с использованием дистанционно управляемых беспилотных летательных аппаратов и устройство для его осуществления | 2021 |
|
RU2778158C1 |


Изобретение относится к системам помощи водителю и системам активной безопасности для транспортных средств, в частности к системам расчета угла сцепки между транспортным средством и прицепом. Система для определения угла сцепки между транспортным средством и прицепом включает в себя устройство формирования изображений, расположенное на прицепе, первую навигационную систему, расположенную в транспортном средстве, вторую навигационную систему, встроенную в устройство формирования изображений, и контроллер, выполненный с возможностью определять угол сцепки на основании данных, полученных от первой навигационной системы и второй навигационной системы. Техническим результатом является усовершенствование системы помощи при движении задним ходом с прицепом. 2 н. и 9 з.п. ф-лы, 4 ил.
1. Система для определения угла сцепки между транспортным средством и прицепом, которая включает в себя:
устройство формирования изображений, расположенное на прицепе, содержащее одно из смартфона или планшета;
первую навигационную систему, расположенную на транспортном средстве;
вторую навигационную систему, встроенную в устройство формирования изображений; и
контроллер, выполненный с возможностью определять угол сцепки на основании данных, полученных от первой навигационной системы и второй навигационной системы.
2. Система по п. 1, в которой первая навигационная система содержит первый GPS-приемник, выполненный с возможностью определять текущее положение и направление транспортного средства.
3. Система по п. 1, в которой вторая навигационная система содержит второй GPS-приемник, выполненный с возможностью определять текущее положение и направление прицепа.
4. Система по п. 1, в которой первая навигационная система содержит первое множество инерциальных датчиков, выполненных с возможностью определять текущее положение и направление транспортного средства.
5. Система по п. 1, в которой вторая навигационная система содержит второе множество инерциальных датчиков, выполненных с возможностью определять текущее положение и направление прицепа.
6. Система для определения угла сцепки между транспортным средством и прицепом, которая включает в себя:
первый GPS-приемник, расположенный на транспортном средстве;
портативное электронное устройство, имеющее второй GPS-приемник и расположенное на прицепе; и
контроллер, выполненный с возможностью определять угол сцепки на основании данных, полученных от первого и второго GPS-приемников, и содержащий модуль определения угла сцепки, выполненный с возможностью чередовать данные, принятые от первого и второго GPS-приемников.
7. Система по п. 6, в которой портативное электронное устройство прикреплено к задней конструкции прицепа и расположено таким образом, чтобы обеспечить захват видеоданных позади прицепа.
8. Система по п. 6, в которой портативное электронное устройство содержит одно из смартфона или планшета.
9. Система по п. 6, в которой первый GPS-приемник выполнен с возможностью определять положение транспортного средства и второй GPS-приемник выполнен с возможностью определять положение прицепа.
10. Система по п. 7, в которой контроллер выполнен с возможностью рассчитывать угол сцепки путем сравнения положения транспортного средства и положения прицепа.
11. Система по п. 7, в которой модуль обнаружения угла сценки содержит фильтр Калмана, выполняющий экстраполяцию положения транспортного средства и положения прицепа на основании получаемых данных и после этого рассчитывающий угол сцепки на основании экстраполированного положения транспортного средства и экстраполированного положения прицепа.
| US 20140085472 A1, 27.03.2014 | |||
| US 20140172232 A1, 19.06.2014 | |||
| US 0008165770 B2, 24.04.2012. |

