Область техники, к которой относится изобретение
Изобретение относится к системам и способам помощи водителю и системам активной безопасности для транспортных средств, в частности к системе и способу помощи водителю транспортного средства с прицепом путем установки на прицепе метки и контроля ее размещения на прицепе, а также к системе для оказания помощи в размещении метки на прицепе.
Уровень техники
Движение задним ходом с прицепом является очень сложной задачей для большинства водителей. Особенно это относится к водителям, не имеющим опыта движения задним ходом с прицепом, например, при редком вождении транспортного средства с прицепом (при аренде прицепа или редком использовании собственного прицепа). Во-первых, эти сложности возникают из-за того, что при движении задним ходом на транспортных средствах с прицепом необходимо поворачивать руль в сторону, противоположную направлению поворота руля при движении задним ходом на транспортном средстве без прицепа и(или) из-за необходимости выполнения торможения для выравнивания транспортного средства с прицепом во избежание складывания сцепки. Во-вторых, небольшие ошибки рулевого управления при движении задним ходом на транспортном средстве с прицепом усиливаются, в результате чего прицеп значительно отклоняется от желаемой траектории.
Для того чтобы помочь водителю при управлении транспортным средством с прицепом, система помощи при движении задним ходом с прицепом должна знать намерения водителя. Известные системы помощи при движении задним ходом с прицепом основаны на одном постулате, заключающемся в том, что водитель транспортного средства с прицепом желает двигаться назад только по прямой, соответственно система явно или неявно использует для транспортного средства с прицепом траекторию с нулевой кривизной. К сожалению, в большинстве случаев движение задним ходом с прицепом включает в себя движение по кривой, в связи с чем использование траектории с нулевой кривизной значительно ограничивает применимость подобных систем. Некоторые известные системы определяют траекторию по карте или с помощью планировщика маршрутов. В связи с этим некоторые системы помощи при движении задним ходом с прицепом перед началом движения проверяют, известен ли маршрут движения задним ходом, например, по карте или с помощью алгоритма планировщика маршрутов. К сожалению, подобные системы имеют относительно сложное устройство человекомашинного интерфейса (HMI), позволяющее определить маршрут, обнаружить препятствия и(или) указать целевую точку движения задним ходом. Более того, для таких систем необходимо создать способ определения целевого маршрута, а также определения момента, когда цель достигнута или места остановки, или ориентира с помощью таких средств, как камера, инерциальная навигационная система или высокоточная система глобального позиционирования (GPS). Подобные требования приводят к увеличению сложности и стоимости системы.
Раскрытие изобретения
В соответствии с одним аспектом настоящего изобретения представлен способ помощи в размещении метки на прицепе. Данный способ включает в себя этапы получения изображения прицепа с помощью камеры на буксирующем транспортном средстве и обработки изображения для определения области установки метки. Способ также включает в себя этапы создания изображения метки, накладываемого на изображение области установки метки, и отображения пользователю изображения прицепа и накладываемого изображения метки на дисплее для помощи установки метки на прицеп.
В соответствии с другим аспектом настоящего изобретения представлена система для оказания помощи в размещении метки на прицепе. Система для оказания помощи в размещении метки на прицепе включает в себя камеру, установленную на буксирующем транспортном средстве и предназначенную для создания изображения прицепа. Система также включает в себя устройство обработки изображения, обрабатывающее изображение для определения области установки метки и создающее изображение метки, которое накладывается на изображение области установки метки. Система также включает в себя дисплей для отображения изображения прицепа и накладываемого изображения метки для помощи установки метки на прицеп.
Эти и другие аспекты, цели и отличительные особенности настоящего изобретения будут поняты и оценены специалистами в данной области техники после изучения приведенных ниже описания, формулы изобретения и сопроводительных чертежей.
Краткое описание чертежей
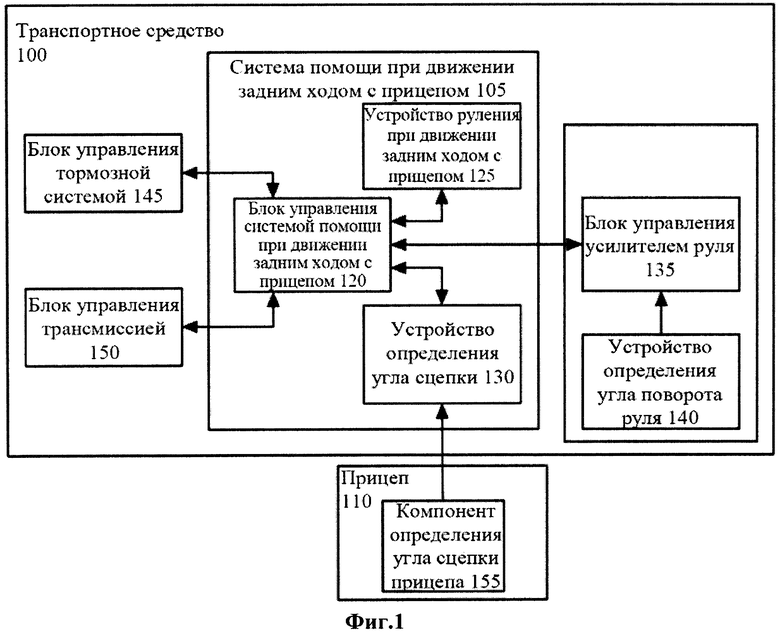
На Фиг. 1 представлена схема соединения прицепа с транспортным средством, при этом данное транспортное средство выполнено с возможностью использования системы помощи при движении задним ходом с прицепом согласно одному варианту.
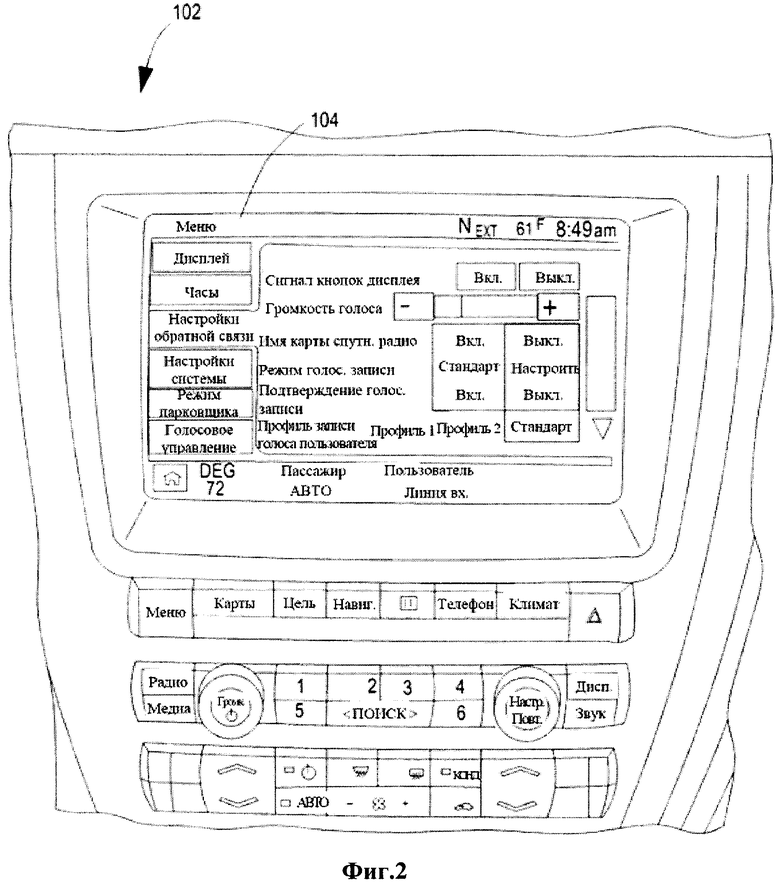
На Фиг. 2 представлено устройство человекомашинного интерфейса (HMI) для системы помощи при движении задним ходом с прицепом.
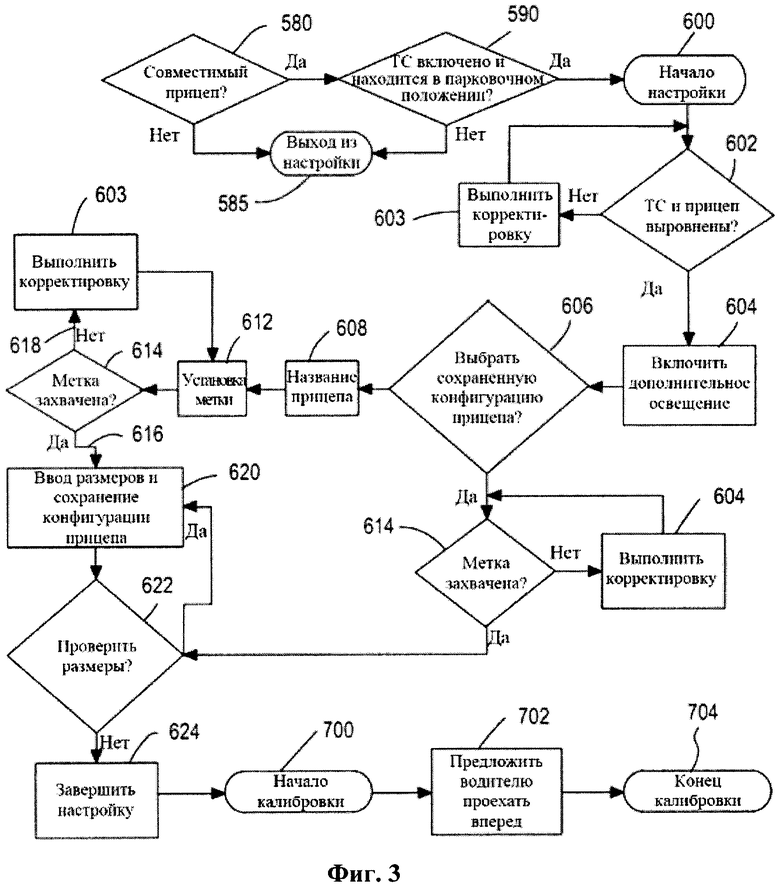
На Фиг. 3 представлена блок-схема для системы помощи при движении задним ходом с прицепом.
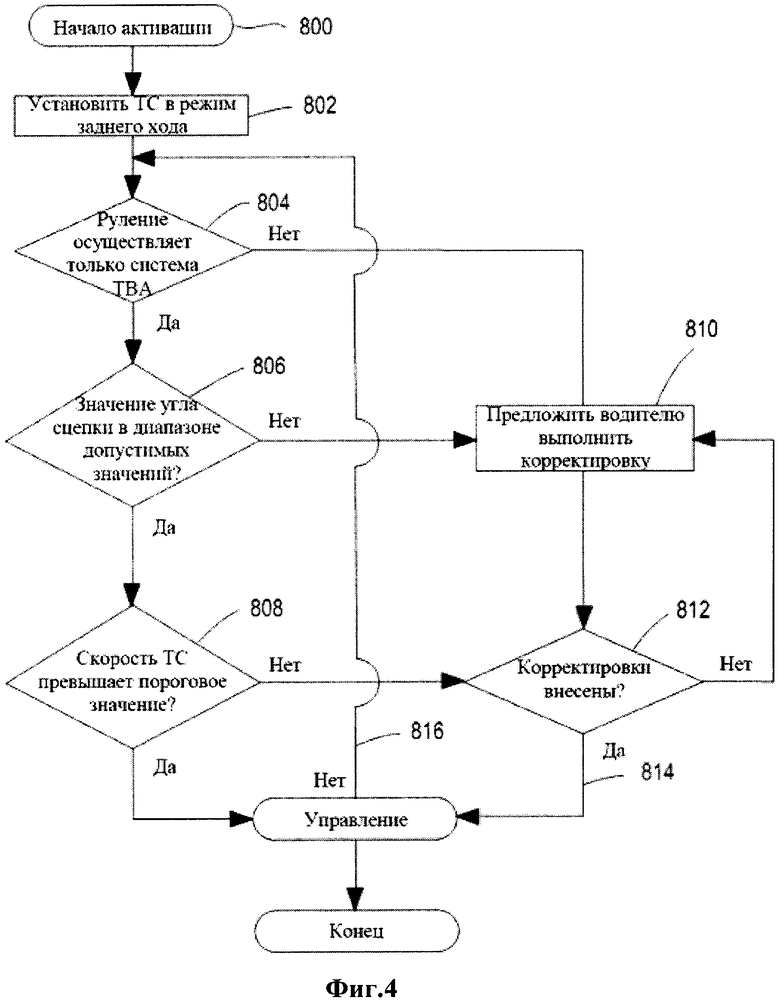
На Фиг. 4 представлена блок-схема модуля настройки согласно одному варианту осуществления изобретения.
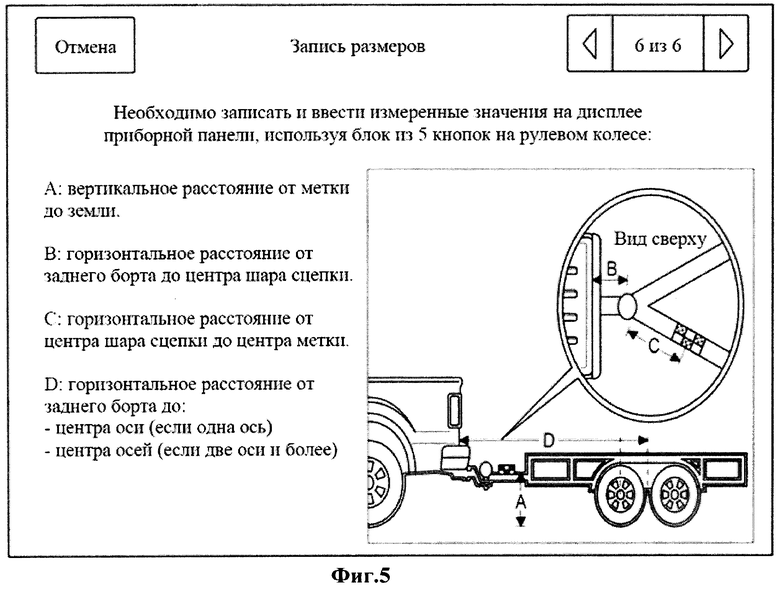
На Фиг. 5 представлен пример изображения, отображаемого на HMI устройства согласно одному варианту осуществления изобретения.
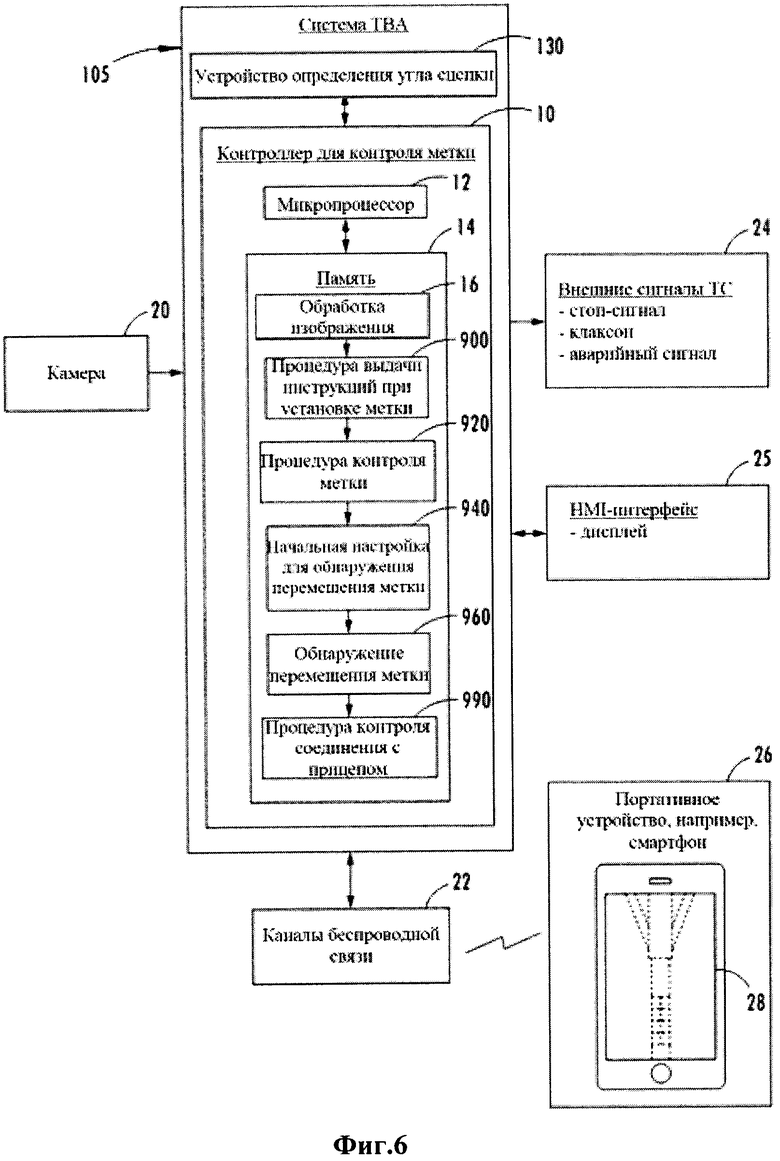
На Фиг. 6 представлена схема системы помощи при движении задним ходом с прицепом, использующей контроллер, который выполняет контроль наличия метки согласно одному варианту осуществления изобретения.
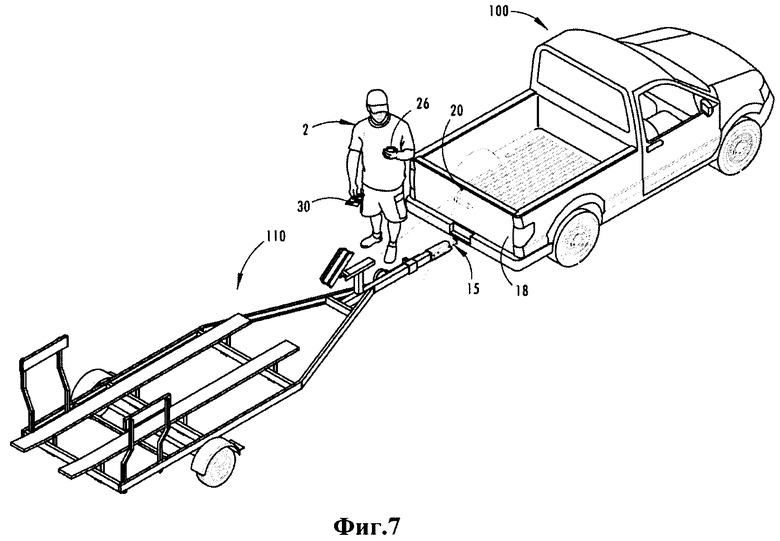
На Фиг. 7 представлена схема, на которой показана установка метки пользователем на прицеп, подсоединенный к транспортному средству.
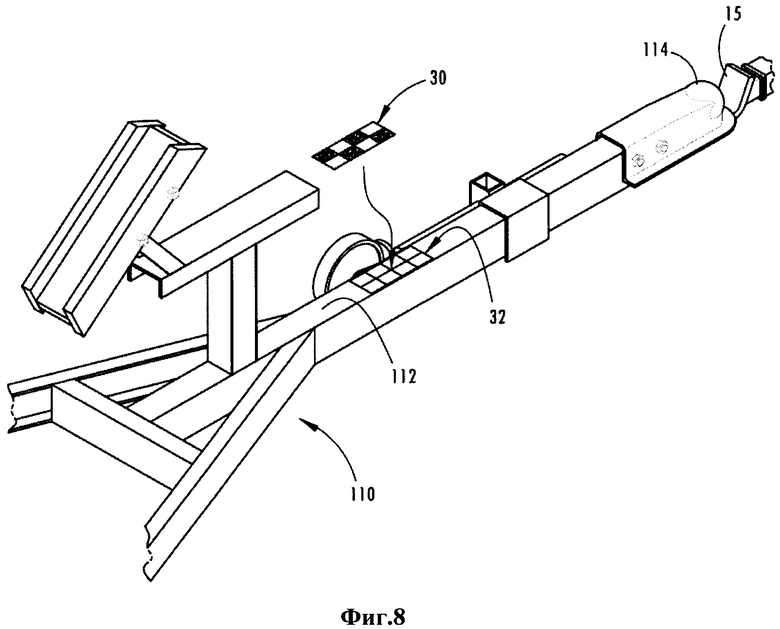
На Фиг. 8 представлено увеличенное изображение передней части прицепа, на котором показана область установки метки на примере приклеиваемой метки (наклейки).
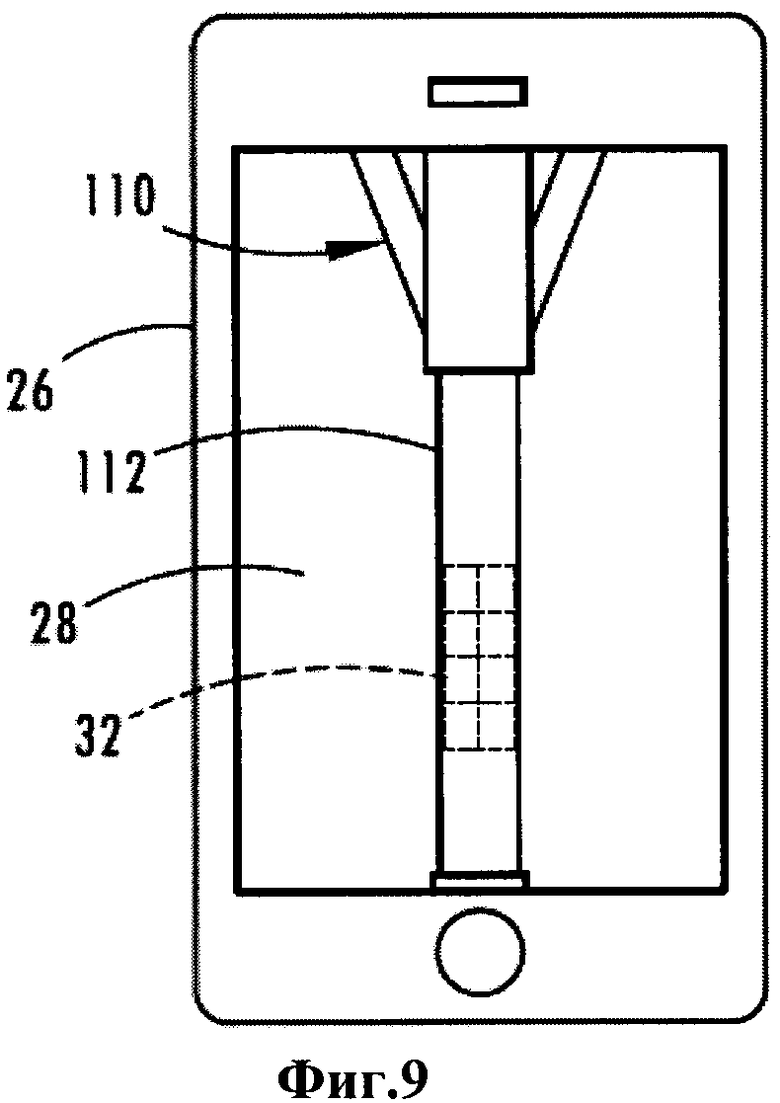
На Фиг. 9 представлен вид спереди портативного устройства с дисплеем, на котором изображение метки наложено на изображение области установки метки на прицепе.
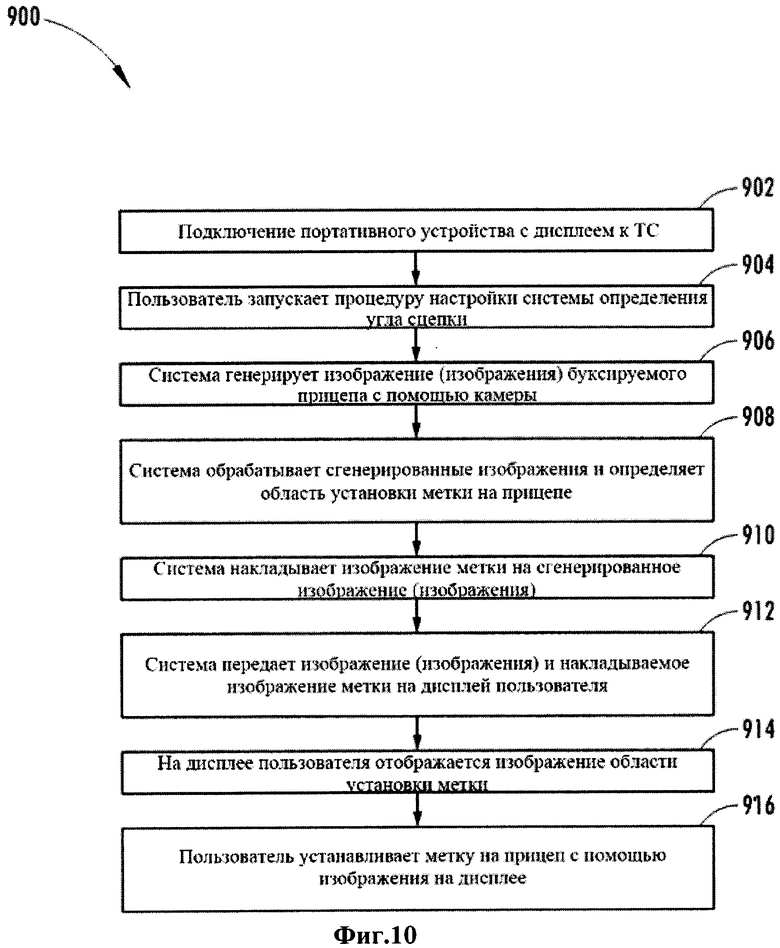
На Фиг. 10 представлена блок-схема способа предоставления помощи пользователю при установке метки на прицеп.
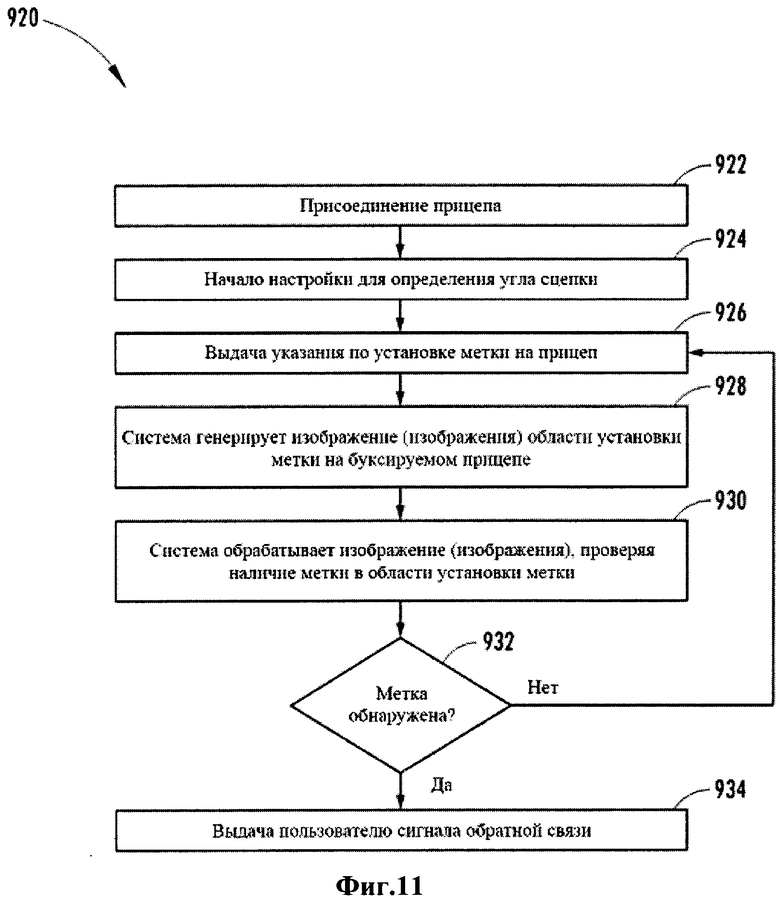
На Фиг. 11 представлена блок-схема способа контроля установки метки на прицеп и генерирование сигнала обратной связи.
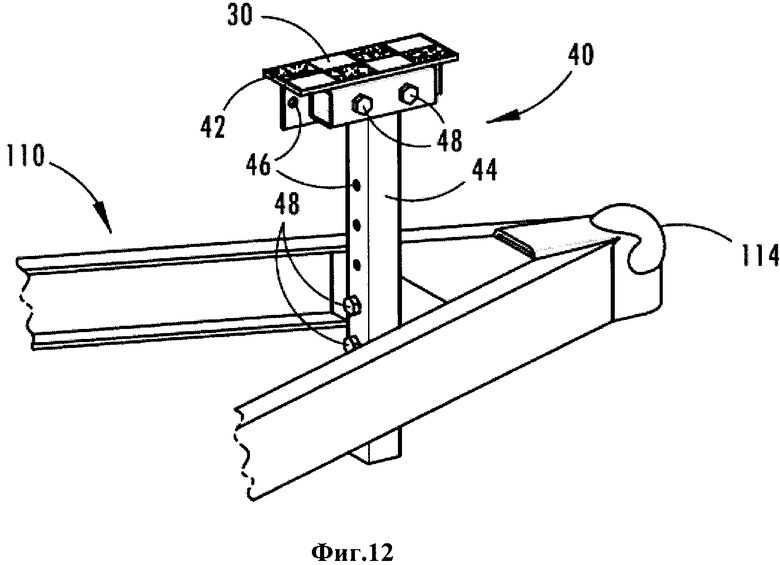
На Фиг. 12 представлен схематичный вид передней части прицепа с системой установки метки согласно одному варианту осуществления изобретения.
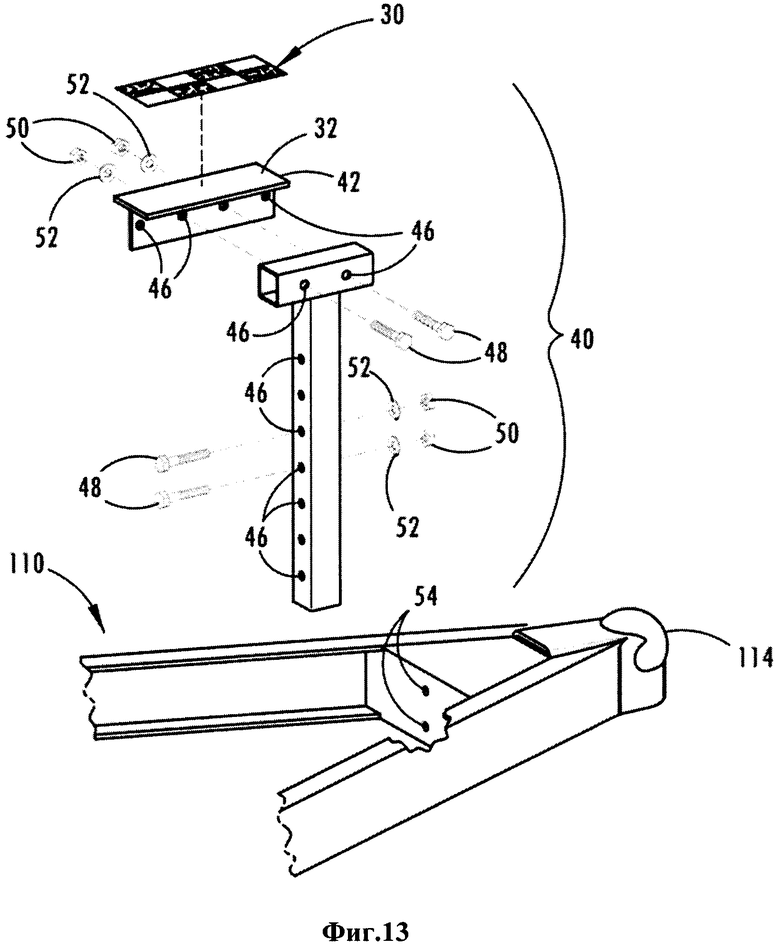
На Фиг. 13 представлена система установки метки и прицеп с Фиг. 12 в разобранном виде.
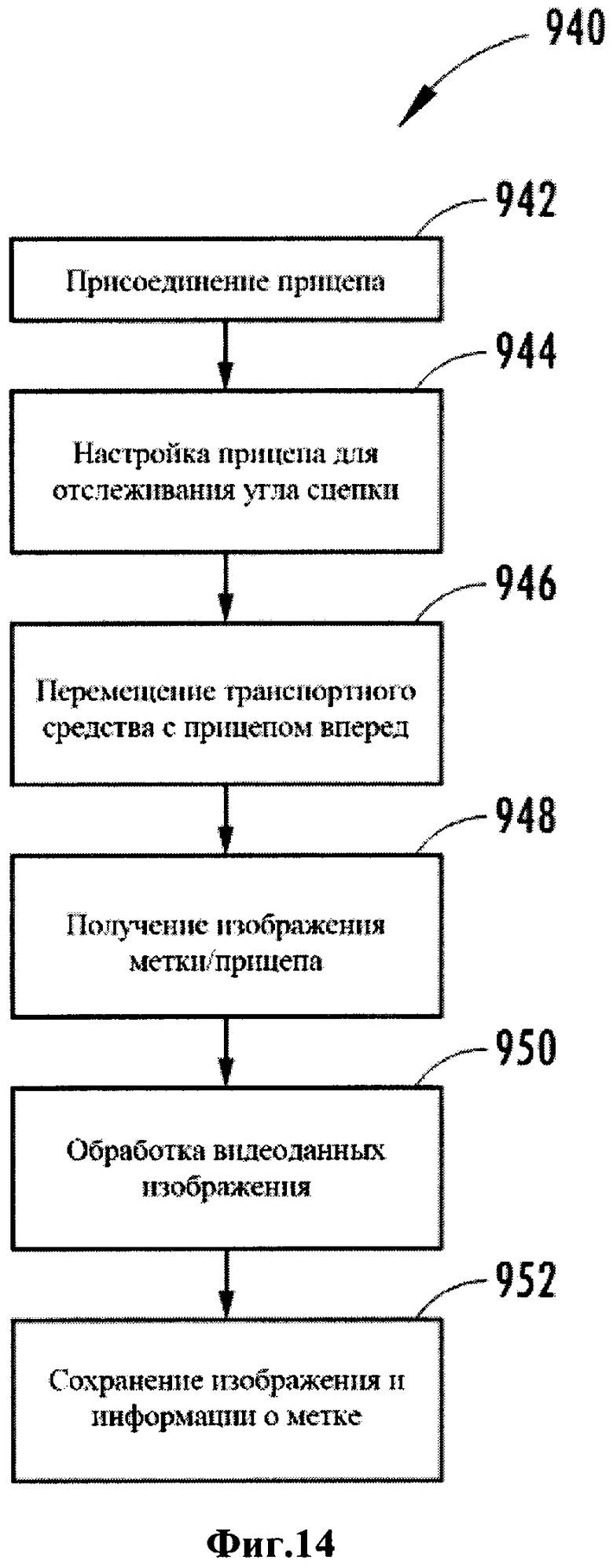
На Фиг. 14 представлена блок-схема процедуры начальной настройки для контроля наличия изменений положения метки на соединении прицепа и повторного выбора значений параметров прицепа.
На Фиг. 15 представлена блок-схема процедуры определения перемещения метки для контроля наличия изменений положения метки на соединении прицепа и повторного выбора значений параметров прицепа.
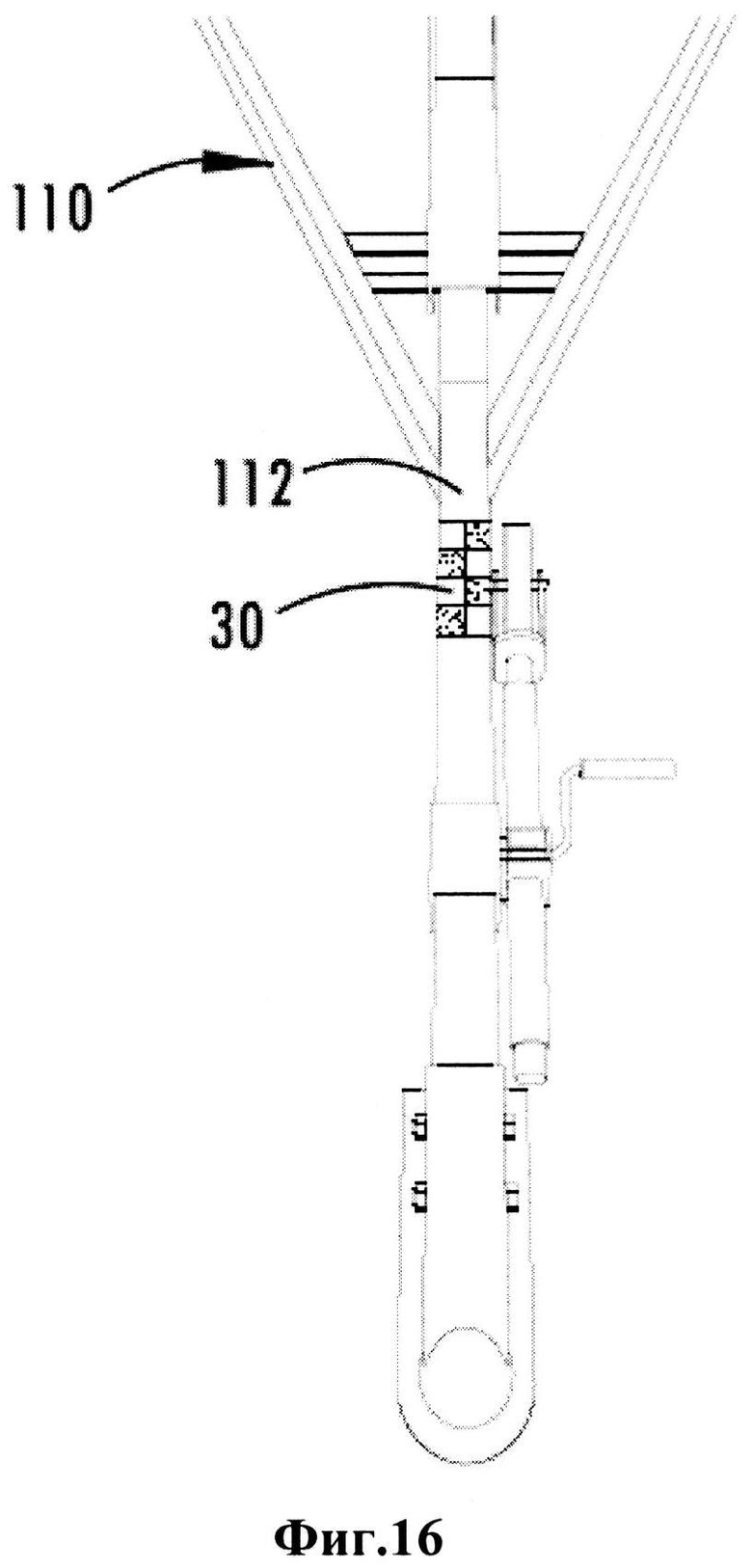
На Фиг. 16 представлено изображение прицепа, на котором метка находится в первом положении.
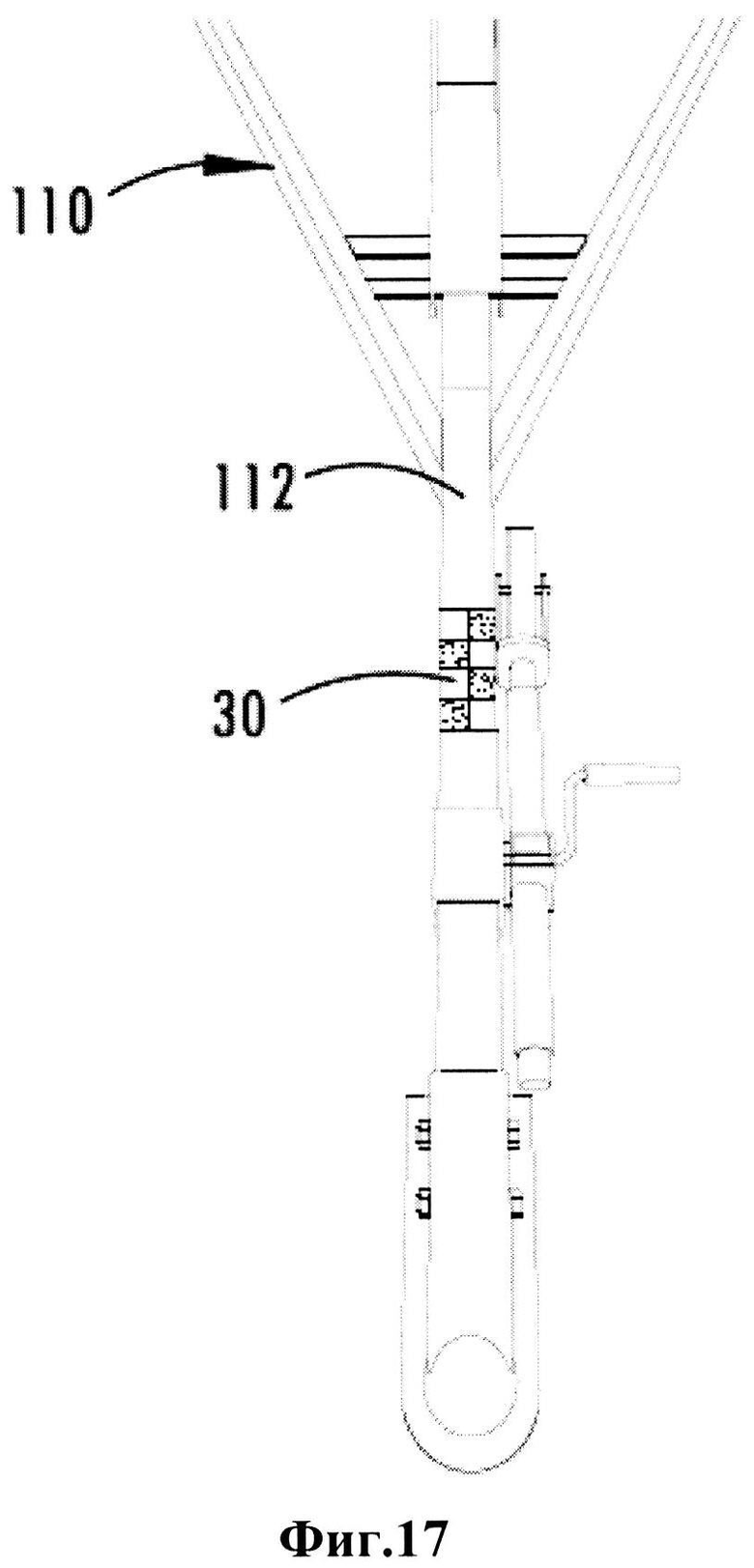
На Фиг. 17 представлено изображение прицепа, на котором метка находится во втором положении согласно одному варианту.
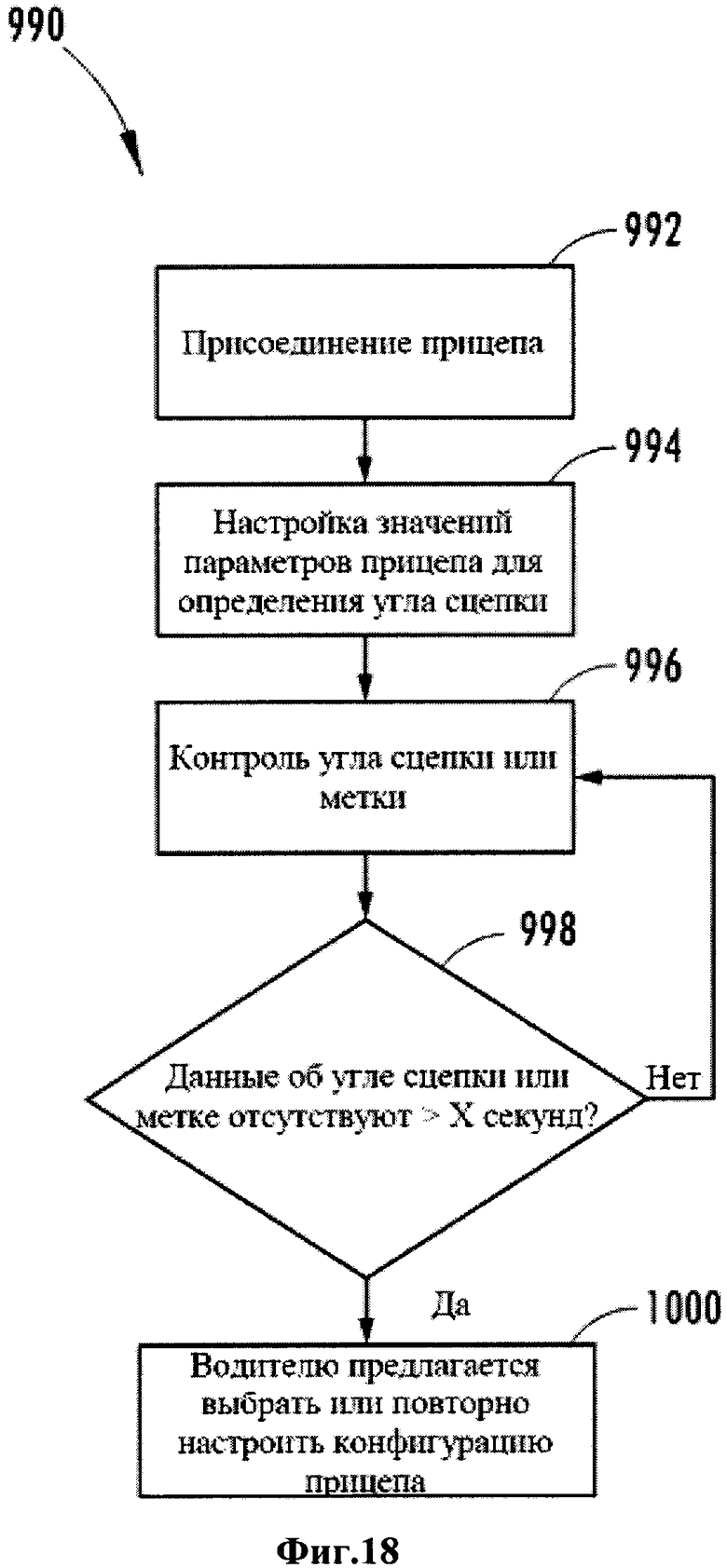
На Фиг. 18 представлена блок-схема процедуры контроля соединения прицепа для обнаружения отсоединения прицепа.
Осуществление изобретения
Хотя различные аспекты предмета изобретения рассмотрены со ссылкой на конкретные варианты осуществления, предмет изобретения не ограничивается ими, в связи с чем возможно выполнение модификаций, изменение вариантов использования и осуществления без отступления от сущности изобретения. На сопроводительных чертежах одинаковыми ссылочными позициями обозначены одни и те же компонентам. Специалисты в данной области техники должны понимать, что различные представленные компоненты могут быть изменены без отступления от сущности изобретения.
На Фиг. 1 изображен вариант транспортного средства 100, выполненный с возможностью использования системы помощи при движении задним ходом с прицепом. Система 105 помощи при движении задним ходом с прицепом, используемая в транспортном средстве 100, контролирует кривизну траектории движения прицепа 110, присоединенного к транспортному средству 100. Такой контроль осуществляется за счет взаимодействия системы 115 усилителя руля транспортного средства 100 и системы 105 помощи при движении задним ходом с прицепом. Когда транспортное средство 100 движется назад, во время работы системы 105 помощи при движении задним ходом с прицепом у водителя могут возникать ограничения, касающиеся возможной величины поворота рулевого колеса транспортного средства 100. Это может быть связано с тем, что в некоторых транспортных средствах система 105 помощи при движении задним ходом с прицепом управляет системой 115 усилителя руля, которая напрямую соединена с рулевым колесом (т.е. рулевое колесо транспортного средства 100 поворачивается вместе с управляемыми колесами транспортного средства 100). HMI-устройство (например, ручка) системы 105 помощи при движении задним ходом с прицепом используется для управления изменением кривизны траектории движения прицепа 110, что позволит выдавать данные команды вне зависимости от поворота рулевого колеса транспортного средства 100, о чем будет сказано более подробно ниже. Однако некоторые транспортные средства, выполненные с возможностью использования системы помощи при движении задним ходом с прицепом согласно изобретению, будут иметь возможность выборочного отделения рулевого управления от перемещения управляемых колес транспортного средства, что позволит использовать рулевое колесо для управления изменением кривизны траектории прицепа при движении задним ходом.
Система 105 помощи при движении задним ходом с прицепом включает в себя блок 120 управления движением задним ходом с прицепом, устройство 125 руления при движении задним ходом с прицепом и устройство 130 определения угла сцепки. Блок 120 управления движением задним ходом с прицепом соединен с устройством 125 руления при движении задним ходом с прицепом и устройством 130 определения угла сцепки с возможностью обмена данными между ними. Следует отметить, что устройство руления при движении задним ходом с прицепом может быть соединено с блоком 120 управления движением задним ходом с прицепом по проводной или беспроводной линии связи. Блок 120 управления движением задним ходом с прицепом соединен с блоком 135 управления усилителем руля системы 115 усилителя руля с возможностью обмена информацией между ними. Устройство определения угла поворота 140 системы 115 усилителя руля соединено с блоком 135 управления усилителем руля с возможностью передачи данных. Система помощи при движении задним ходом с прицепом также подключена к блоку 145 управления тормозной системой и блоком 150 управления трансмиссией для обеспечения связи между данными устройствами. Система 105 помощи при движении задним ходом с прицепом, система 115 усилителя руля, блок 145 управления тормозной системой, блок 150 управления трансмиссией и устройство переключения передач (PRNDL) представляют собой компоненты, помогающие при движении задним ходом с прицепом согласно настоящему изобретению.
Блок 120 управления системой помощи при движении задним ходом с прицепом предназначен для реализации логики (т.е. инструкций) для приема информации от устройства 125 руления при движении задним ходом с прицепом, устройства 130 определения угла сцепки, блока 135 управления усилителем руля, блока 145 управления тормозной системой и блока 150 управления трансмиссией. Блок 120 управления системой помощи при движении задним ходом с прицепом (например, его алгоритм определения кривизны траектории прицепа) генерирует данные о рулевом управлении транспортным средством в виде функции от всех или части данных, полученных от устройства 125 руления при движении задним ходом с прицепом, устройства 130 определения угла сцепки, блока 135 управления усилителем руля, блока 145 управления тормозной системой и блока 150 управления трансмиссией. Затем эти данные о рулевом управлении транспортным средством передаются на блок 135 управления усилителем руля для обеспечения управления транспортным средством 100 посредством системы 115 усилителя руля для достижения заданной траектории движения прицепа 110.
Устройство 125 руления при движении задним ходом с прицепом передает блоку 120 управления системой помощи при движении задним ходом с прицепом данные, определяющие заданную траекторию движения прицепа 110 (т.е. данные о рулевом управлении прицепом). Данные о рулевом управлении прицепом могут включать в себя данные, связанные с заданным изменением траектории движения (например, изменение радиуса кривизны траектории), а также данные, указывающие на необходимость движения прицепа по траектории, определяемой продольной центральной осью прицепа (т.е. практически по прямой линии). В предпочтительном варианте устройство 125 руления при движении задним ходом с прицепом включает в себя устройство регулировки угла поворота, позволяющее водителю транспортного средства 100 взаимодействовать с устройством 125 руления при движении задним ходом с прицепом для выбора требуемых действий по рулевому управлению (например, выдачи команды для установки необходимого изменения радиуса траектории движения прицепа и(или) команды для движения практически по прямой траектории, определяемой продольной центральной осью прицепа), о чем будет сказано более подробно ниже. В предпочтительном варианте устройство ввода регулировки угла поворота представляет собой ручку, которая может вращаться вокруг оси, проходящей через верхнюю/лицевую поверхность ручки. В других вариантах осуществления устройство ввода регулировки угла поворота представляет собой ручку, которая способна вращаться вокруг оси, проходящей практически параллельно верхней/лицевой поверхности ручки.
Некоторые транспортные средства (например, с управляемыми передними колесами) имеют такую конфигурацию системы усилителя руля, которая позволяет частично отключать управление с помощью рулевого колеса от перемещения управляемых колес транспортного средства. Таким образом, руль можно будет вращать независимо от того, как система усилителя руля транспортного средства будет управлять колесами (например, на основании данных о рулевом управлении транспортным средством, выданных блоком управления системы усилителя руля от блока управления системой помощи при движении задним ходом с прицепом согласно настоящему изобретению). В данном случае в транспортных средствах, в которых рулевое колесо может быть выборочно отсоединено от управляемых колес для обеспечения их независимой работы, данные о рулевом управлении прицепом системы помощи при движении задним ходом с прицепом, соответствующей настоящему изобретению, могут быть получены на основании поворота рулевого колеса. Таким образом, в некоторых вариантах осуществления рулевое колесо является вариантом устройства ввода угла поворота согласно настоящему изобретению. В этих вариантах рулевое колесо будет возвращаться (например, с помощью устройства, которое можно выборочно включить/задействовать) в исходное положение (позиция без движения), находящееся между противоположными предельными положениями поворота.
Устройство 130 определения угла сцепки, используемое вместе с компонентом 155 определения угла сцепки прицепа 110, предоставляет блоку 120 управления системой помощи при движении задним ходом с прицепом информацию, касающуюся угла между транспортным средством 100 и прицепом 110 (т.е. информацию об угле сцепки). В предпочтительном варианте устройство 130 определения угла сцепки представляет собой камеру, например, камеру заднего вида транспортного средства 100, которая захватывает изображения (т.е. визуально контролирует) метку (т.е. компонента 155 определения угла сцепки), прикрепленной к прицепу 110, при движении прицепа 110 назад с помощью транспортного средства 100. В предпочтительном, но не обязательном варианте компонент 155 определения угла сцепки представляет собой специальный компонент (например, устройство, прикрепленное/встроенное в поверхность прицепа 110 для того, чтобы устройство 130 определения угла сцепки могло его распознать). В качестве альтернативы устройство 130 определения угла сцепки может представлять собой устройство, которое физически установлено на компоненте сцепки транспортного средства 100 и(или) на сопряженном компоненте сцепки прицепа 110 для определения угла между центральными продольными осями транспортного средства 100 и прицепа 110. Устройство 130 определения угла сцепки может быть выполнено с возможностью обнаружения положения складывания сцепки и(или) соответствующей информации (например, о достижении порогового значения угла сцепки).
Блок 135 управления усилителем руля предоставляет блоку 120 управления системой помощи при движении задним ходом с прицепом информацию, связанную с угловым положением (например, углом) рулевого колеса и(или) угловым положением (например, углом поворота) управляемых колес транспортного средства 100. В некоторых вариантах блок 120 управления системой помощи при движении задним ходом с прицепом может представлять собой встроенный компонент системы 115 усилителя руля. Например, блок 135 управления усилителем руля может включать в себя алгоритм помощи при движении задним ходом с прицепом для генерирования данных о рулевом управлении транспортным средством в виде функции от всех или части данных, полученных от устройства 125 руления при движении задним ходом с прицепом, устройства 130 определения угла сцепки, блока 135 управления усилителем руля, блока 145 управления тормозной системой и блока 150 управления трансмиссией.
Блок 145 управления тормозной системой выдает блоку 120 управления системой помощи при движении задним ходом с прицепом информацию, касающуюся скорости движения транспортного средства. Информация о скорости движения транспортного средства может быть получена на основании скорости вращения каждого колеса от блока 145 управления тормозной системой или может быть выдана блоком управления двигателем с проверкой достоверности сигнала. Скорость движения транспортного средства также может быть определена блоком управления двигателем. В некоторых случаях скорость вращения каждого колеса также можно использовать для определения скорости рыскания (отклонения от направления движения) транспортного средства, которая затем может быть передана блоку 120 управления системой помощи при движении задним ходом с прицепом для использования во время определения информации о рулевом управлении транспортным средством. В некоторых вариантах блок 120 управления системой помощи при движении задним ходом с прицепом может выдавать данные о торможении транспортного средства блоку 145 управления тормозной системой, позволяя блоку 120 управления системой помощи при движении задним ходом с прицепом управлять торможением транспортного средства 100 при движении задним ходом с прицепом 110. Например, использование блока 120 управления системой помощи при движении задним ходом с прицепом для регулирования скорости транспортного средства 100 при движении задним ходом с прицепом 110 может уменьшить вероятность возникновения неприемлемых условий при движении задним ходом с прицепом. В качестве нескольких примеров неприемлемых условий при движении задним ходом с прицепом можно указать (без ограничения) превышение скорости движения транспортного средства, высокую угловую скорость сцепки, нарушение угловой динамической устойчивости прицепа, а также рассчитанное теоретическое условие складывания сцепки (определяется максимальным углом поворота транспортного средства, длиной дышла, колесной базой транспортного средства и действительной длиной прицепа) или достижение пределов складывания сцепки (определяемых пределом углового смещения между транспортным средством 100 и прицепом 110) и т.д. Также следует понимать, что блок 120 управления системой помощи при движении задним ходом с прицепом может выдать сигнал, соответствующий уведомлению (например, предупреждению) о фактическом, предстоящим и(или) предполагаемом неприемлемом состоянии прицепа при движении задним ходом.
Блок 150 управления системой трансмиссии взаимодействует с блоком 120 управления системой помощи при движении задним ходом с прицепом для регулировки скорости и ускорения транспортного средства 100 во время движения задним ходом с прицепом 110. Как было сказано выше, регулировка скорости транспортного средства 100 необходима для ограничения вероятности возникновения неприемлемого состояния прицепа при движении задним ходом, например, складывания сцепки и нарушения угловой динамической устойчивости прицепа. Как и в рассмотренном случае с превышением скорости в качестве неприемлемого состояния прицепа при движении задним ходом, к возникновению таких неприемлемых состояний может привести также чрезмерное ускорение и резкое изменение кривизны траектории.
Для обеспечения управления может быть предусмотрено взаимодействие водителя с системой 105 помощи при движении задним ходом с прицепом для выполнения настройки данной системы 105. Как показано на Фиг. 2, транспортное средство 100 также имеет устройство человекомашинного интерфейса 102 (HMI), обеспечивающее работу системы помощи при движении задним ходом с прицепом за счет взаимодействия водителя с HMI устройством 102.
На Фиг. 2 представлен пример HMI-устройства 102 транспортного средства, используемого водителем для взаимодействия с системой 105 помощи при движении задним ходом с прицепом. Водителю отображается несколько меню 104 (на Фиг. 2 изображено только одно меню), выводимых на HMI 102. HMI меню 104 помогают водителю через с помощью различных модулей (представленных на Фиг. 3 и 4) для настройки 600, калибровки 700 и включения 800 системы 105 помощи при движении задним ходом с прицепом таким образом, что способы управления могут быть реализованы для обеспечения помощи водителю при движении задним ходом с прицепом, представленные в общем виде на блок-схеме способа с Фиг. 3 и 4, и более подробно описанные ниже. Каждый модуль предназначен для работы с определенными компонентами или функциями, используемыми для настройки системы помощи при движении задним ходом с прицепом и точной реализации способов управления. Хотя модули описаны с указанием конкретных функций настоящего изобретения, следует отметить, что каждый модуль не ограничивается функциями представленных примеров. Без отступления от сущности изобретения можно изменить конфигурацию модулей или заменить компоненты или функции модуля.
Система 105 помощи при движении задним ходом с прицепом будет помогать водителю при выполнении всех действий, необходимых для соединения прицепа и прикрепления метки. Водитель может запустить настройку с помощью устройства 125 руления при движении задним ходом с прицепом, например, повернув ручку или нажав на нее, либо выбрав систему помощи при движении задним ходом с прицепом из меню на HMI устройства 102. Как показано на Фиг. 3, водитель запускает систему помощи при движении задним ходом с прицепом с помощью устройства руления при движении задним ходом с прицепом. При использовании поворотной ручки (кнопки) для запуска системы помощи при движении задним ходом с прицепом водитель должен нажать кнопку или повернуть данную ручку. Система поможет водителю осуществить соединение 580 совместимого прицепа. Совместимый прицеп - прицеп, который соединяется с транспортным средством в одной точке, расположенной за задней осью транспортного средства.
После выбора системы с помощью устройства 125 руления при движении задним ходом с прицепом или HMI устройства 102 система помогает водителю подготовить транспортное средство и транспортное средство, соединенное с прицепом, если необходимо. Транспортное средство 100 должно быть включено и находиться в стояночном положении, как показано на этапе 590. Если транспортное средство 100 включено, но движется со скоростью, превышающей заданное предельное значение, например, пять миль в час, то система 105 помощи при движении задним ходом с прицепом отключится и станет недоступной для водителя. Модуль 600 настройки системы 105 помощи при движении задним ходом с прицепом не начнется или завершится на этапе 585. Если выбранный тип прицепа 110 не совместим с системой 105 помощи при движении задним ходом с прицепом, то модуль 600 настройки завершится на этапе 585 или не начнется. Если прицеп 110 совместим с системой 105 помощи при движении задним ходом с прицепом, то модуль 600 настройки проверит, установлен ли механизм переключения передач транспортного средства 100 в стояночное положение. Если транспортное средство включено, а механизм переключения передач не находится в стояночном положении, на этапе 585 не начинается выполнение модуля 600 настройки.
После подсоединения совместимого прицепа 110 на этапе 580 и проверки того, что транспортное средство 100 включено и находится в стояночном положении, на этапе 590 HMI 102 отобразит меню 104, в котором водитель должен выбрать режим буксировки. После выбора режима буксировки в меню 104 отобразятся опции прицепа. Затем в меню режима буксировки водитель выбирает опции прицепа. В меню 104 на HMI 102 водителю предлагается добавить данные о новом прицепе или выбрать существующие данные о прицепе, после чего начинается выполнение модуля 600 настройки, соответствующего настоящему изобретению. В некоторых системах определения угла прицепа, использующих камеру, способ начинается с этапа 602, на котором на HMI водителю выводится меню с предупреждением о том, что прицеп должен находиться на одной линии с транспортным средством, т.е. угол поворота сцепки между прицепом и транспортным средством должен быть равен нулю. Данное предупреждение указывает на то, что водителю может потребоваться выполнить корректирующие действия, например, проехать немного вперед, чтобы выровнять прицеп относительно транспортного средства в соответствии с требованиями, указанными на этапе настройки 600. На HMI 102 может быть выведено динамическое или статическое графическое изображение, с помощью которого водитель сможет визуально определить момент, когда прицеп 110 будет выровнен относительно транспортного средства 100, что является обязательным условием для правильной настройки и калибровки системы 105 помощи при движении задним ходом с прицепом. На этапе 603 водитель вносит необходимые корректировки, включая выданные системой указания, после чего проверяет завершение всех необходимых действий, выполненных на этапе 603, и выравнивание прицепа относительно транспортного средства. В других системах определения угла прицепа водителю может быть не нужно выполнять выравнивание прицепа во время настройки.
Для того чтобы помочь водителю выполнить настройку, на этапе 604 включаются огни заднего хода или любые другие вспомогательные огни, которые могут быть установлены на транспортном средстве. При использовании нового прицепа, который до этого не подсоединялся к данному транспортному средству или для которого в памяти системы помощи при движении задним ходом с прицепом нет сохраненных данных, на этапе 606 водителю предоставляется выбор, позволяющий ввести название прицепа или выбрать ранее сохраненную конфигурацию прицепа. Присвоение названия прицепу на этапе 608 позволит легко идентифицировать его при следующем подсоединении к транспортному средству и избавит водителя от необходимости повторного выполнения настройки. Водитель либо может ввести уникальное название, которое позволит идентифицировать прицеп с сохраняемыми настройками в памяти системы помощи при движении задним ходом с прицепом, либо может выбрать ранее сохраненную конфигурацию для прицепа, подходящую для подсоединяемого прицепа. Система контроля не позволит ввести одинаковое название для двух прицепов. Таким образом, если водитель попытается ввести название, которое совпадает с названием сохраненной ранее конфигурации прицепа, то на HMI появится соответствующее сообщение и запрос ввода другого названия для данной конфигурации. При наличии заранее сохраненной подходящей конфигурация прицепа водитель может выбрать ее на этапе 610, в этом случае некоторые этапы способа настройки можно будет пропустить.
Следующее описание относится к создаваемой конфигурации прицепа для системы определения угла прицепа, использующей камеру. На этапе 612 водителю предлагается установить на прицеп метку определения угла сцепки, используемую для калибровки. На HMI может быть отображено статическое изображение, с помощью которого водителю выдаются указания по установке метки на прицепе, используемой для определения угла сцепки. Установка метки зависит от типа буксируемого прицепа, в связи с чем водителю могут быть отображены опции, позволяющие ему выбрать прицеп соответствующего типа. На статическом изображении могут быть указаны допустимые и недопустимые места прикрепления метки. Статическое изображение, на котором указаны соответствующие места установки метки, может быть наложено на вид сцепки прицепа сзади. После установки водителем метки на прицеп и подтверждения выполнения данной операции с помощью HMI в рамках процедуры настройки на этапе 614 водителю выдается визуальный сигнал обратной связи, подтверждающий правильность установки метки. С помощью HMI на этапе 616 водитель подтверждает, что метка была правильно идентифицирована системой помощи при движении задним ходом с прицепом. Аналогичным образом при работе с прицепом уже сохраненной конфигурации данный прицеп уже будет иметь установленную метку. На этапе 614 система, помощи при движении задним ходом с прицепом обнаружит метку и выдаст водителю визуальный сигнал обратной связи, подтверждающий обнаружение метки.
Если на этапе 614 метка не будет обнаружена в течение заранее заданного периода времени, на этапе 618 водителю будет выдано уведомление о необходимости перемещения метки, а также указаны необходимые корректирующие действия. К возможным корректирующим действиям, предлагаемым водителю, можно отнести чистку линзы камеры, чистку метки, замену метки при ее повреждении или износе, перемещение транспортного средства с прицепом в область с лучшим уровнем освещенности для камеры и(или) метки, а также перемещение метки в подходящее место. На этапе 603 водитель вносит необходимые корректировки. Как было сказано ранее, некоторые системы определения угла прицепа могут не требовать установки метки на прицеп в режиме настройки. Метка и обнаружение метки описаны применительно к системам определения угла сцепки, использующим камеру.
После обнаружения метки на этапе 614 системой помощи при движении задним ходом с прицепом и водитель имеет подтверждение обнаружения метки на этапе 616, на этапе 620, используя различные меню, водитель должен ввести данные о параметрах прицепа, которые могут быть сохранены в системе помощи при движении задним ходом с прицепом в качестве конфигурации прицепа, соответствующей используемому названию прицепа. При следующем подсоединении данного прицепа к транспортному средству уникальная конфигурация прицепа уже будет сохранена в памяти, благодаря чему время выполнения модуля настройки будет сокращено, а в некоторых случаях данный этап можно будет полностью пропустить. Для отображения значений параметров на экран HMI водителю могут быть выведены статические изображения. Как показано на Фиг. 5, водителю могут быть отображены видеоизображения транспортного средства, прицепа или области между ними, параметры которых водитель должен ввести. Кроме того, водителю могут быть отображены ограничения вводимых значений параметров, заданные в системе помощи при движении задним ходом с прицепом. При вводе недопустимых числовых значений параметров водителю может быть выдано соответствующее предупреждение. Кроме того, запросы вводимых значений параметров могут отображаться водителю в последовательности, в которой данные должны вводиться в систему помощи при движении задним ходом с прицепом.
Хотя выше был описан порядок ввода значений параметров водителем, следует отметить, что без отступления от сущности изобретения можно использовать и другие способы ввода соответствующей информации. Например, может быть использована система автоматического определения значений параметров, использующая имеющиеся данные о транспортном средстве и прицепе, в частности скорости движения транспортного средства, скорости вращения колеса, угла поворота рулевого колеса, угла между транспортным средством и прицепом, а также скорости изменения этого угла.
В качестве примера значений параметров можно привести горизонтальное расстояние от задней части транспортного средства до центра шара сцепки, горизонтальное расстояние от задней части транспортного средства до центра метки, вертикальное расстояние от метки до земли, а также горизонтальное перемещение метки от центральной линии шара сцепки. Если метка расположена не на центральной линии шара сцепки, система помощи при движении задним ходом с прицепом должна иметь данные о том, на какой стороне транспортного средства установлена метка (на стороне пассажира или на стороне водителя). Водитель может указать сторону расположения метки (сторону пассажира или сторону водителя) с помощью меню HMI. Система помощи при движении задним ходом с прицепом также использует значение горизонтального расстояния от задней части транспортного средства до центра оси или осей прицепа. Данные значения могут быть введены в английских и метрических единицах измерения.
Перед продолжением выполнения настройки на этапе 622 водитель может исправить любое введенное значение. В противном случае выполнение модуля 600 настройки завершается на этапе 624, после чего запускается модуль 700 калибровки.
Модуль 700 калибровки предназначен для калибровки алгоритма контроля кривизны на основании известных значений параметров прицепа, а также для калибровки системы помощи при движении задним ходом с прицепом с учетом отклонения угла сцепки. После завершения выполнения модуля 600 настройки способ переходит к модулю 700 калибровки, в рамках которого на этапе 702 система выдает водителю команду перемещения транспортного средства с прицепом по прямой вперед для выполнения калибровки датчика угла сцепки. На этапе 704 на HMI водителю отображается всплывающее меню или окно, сообщающее о том, что для завершения способа калибровки необходимо переместить транспортное средство с прицепом вперед. После завершения калибровки на HMI-интерфейсе на этапе 704 водителю отображается соответствующее сообщение. На этапе 706 в памяти сохраняется любое значение отклонения угла сцепки, которое может быть использовано алгоритмом контроля кривизны, после чего модуль 700 калибровки завершается на этапе 704.
Хотя выше была описана калибровка угла сцепки путем перемещения транспортного средства с прицепом, следует отметить, что без отступления от сущности изобретения можно использовать другие способы калибровки угла сцепки.
После выполнения модуля 600 настройки и модуля 700 калибровки может быть запущен модуль 800 активации. Модуль 800 активации описан со ссылкой на Фиг. 4. Модуль 800 активации предназначен для активации автоматического рулевого управления транспортным средством во время движения задним ходом с прицепом. На этапе 802 водителю быть выдана команда включения заднего хода. После активации системы помощи при движении задним ходом с прицепом система рулевого управления не будет принимать команды изменения угла поворота от любого источника, кроме системы помощи при движении задним ходом с прицепом (этап 804). Модуль 600 настройки и модуль 700 калибровки должны быть завершены, а текущее значение угла сцепки должно находиться в заданных пределах, используемых системой помощи при движении задним ходом с прицепом (этап 806). Скорость движения транспортного средства также должна быть меньше заданного значения скорости движения при выполнении активации (этап 808). При невыполнении любого одного или всех условий (этапы 804, 806, 808) на этапе 810 водителю предлагается выполнить соответствующие корректировки. На этапе 814 водитель должен подтвердить завершение выполнения корректировок, после чего блок управления начнет работу. Если после выполнения корректировок модуль активации определит, что они недостаточны, то на этапе 810 водителю будет предложено выполнить другие корректировки.
В системах рулевого управления, в которых рулевое колесо напрямую соединено с управляемыми колесами транспортного средства, водитель не может управлять рулем во время движения задним ходом с прицепом. Если движению рулевого колеса мешает водитель или что-либо еще, то на этапе 810 система помощи при движении задним ходом с прицепом предложит водителю убрать руки с руля. Выполнение модуля 800 активации будет отменено или приостановлено до тех пор, пока препятствие не будет устранено. При превышении порогового значения скорости движения транспортного средства или при недопустимом значении угла сцепки транспортного средства на этапе 810 водителю будет предложено выполнить корректирующие действия. До выполнения проверки и подтверждения завершения корректирующих действий выполнение модуля 800 активации и модулей 200, 500 управления будет приостановлено.
Когда на этапе 802 водитель переводит рычаг переключения передач из парковочного (стояночного) положения в положение заднего хода и нажимает или поворачивает ручку устройства 125 руления при движении задним ходом с прицепом, на дисплее HMI появляется изображение с камеры заднего вида. Если в какой-либо момент движения задним ходом угол сцепки станет слишком большим с точки зрения способности системы контролировать кривизну траектории движения прицепа, система TBA (помощи при движении задним ходом с прицепом) выдаст водителю предупреждение о том, чтобы он проехал вперед, что позволит уменьшить угол сцепки. Если в какой-либо момент движения задним ходом система не сможет отслеживать угол сцепки, то водителю будут выданы инструкции по устранению проблемы. Если в какой-либо момент скорость движения транспортного средства превысит заранее заданную скорость активации, система выдаст водителю предупреждение в виде визуального и звукового сигнала о необходимости снижения скорости или остановки. При выполнении всех условий модуля активации может быть запущен модуль управления.
В системе помощи при движении задним ходом с прицепом метка, установленная на прицепе, может быть использована в качестве компонента 155 определения угла сцепки. При этом система помощи при движении задним ходом с прицепом может использовать информацию, получаемую посредством захвата и обработки изображения метки устройством 130 определения угла сцепки согласно одному варианту осуществления изображения. Согласно другим вариантам метка может быть использована для идентификации замены прицепа, соединения или отсоединения прицепа, а также другой информации, касающейся прицепа. Метка представляет собой идентифицируемую визуальную метку, изображение которой может быть получено с помощью видеокамеры, после чего данная метка может быть обнаружена и проанализирована посредством устройства обработки изображения. В соответствии с одним вариантом метка может представлять собой наклеиваемую метку, также известную как стикер (наклейка), которую можно приклеить с помощью клея к одной стороне прицепа, предпочтительно в пределах области установки метки, где камера и устройство обработки изображения смогут обнаружить метку и ее положение на прицепе для определения информации о прицепе, например, угла между прицепом и буксировочным транспортным средством. Система помощи при движении задним ходом с прицепом может выдать пользователю одно или несколько изображений области установки метки на прицепе для обеспечения правильной установки метки на прицепе. Кроме того, система помощи при движении задним ходом с прицепом может контролировать метку для определения правильности ее установки в области установки метки и выдачи пользователю сигнала (сигналов) обратной связи. Также контроль метки может позволить системе помощи при движении задним ходом с прицепом контролировать наличие соединения с прицепом за счет отслеживания ее перемещения для определения изменения состояния подсоединенного прицепа и выполнения соответствующих действий на основании полученных данных. Также система помощи при движении задним ходом с прицепом может контролировать угол сцепки или положение метки, чтобы определить изменение состояния подсоединенного прицепа (т.е. отсоединение и замену на другой прицеп), а также инициировать выполнение соответствующих действий на основании полученных данных.
На Фиг. 6 изображена система 105 помощи при движении задним ходом с прицепом, включающая в себя устройство 130 определения угла сцепки и контроллер 10 для выполнения контроля метки, выдачи инструкций (помощи) по установке метки, контроля наличия соединения с прицепом, определения перемещения прицепа и запуска соответствующих действий. Контроллер 10 для контроля метки может включать в себя микропроцессор 12 и(или) другую аналоговую и(или) цифровую схему для выполнения одной или нескольких процедур. Кроме того, контроллер 10 для контроля метки может включать в себя запоминающее устройство 14 для хранения одной или нескольких процедур, включая процедуру (процедуры) 16 обработки изображений, процедуру 900 выдачи инструкций при установке метки, процедуру 920 контроля метки, процедуру 940 начальной настройки для обнаружения перемещения метки, процедуру 960 обнаружения перемещения метки, процедуру 990 контроля соединения с прицепом. Следует понимать, что контроллер 10 для контроля метки может представлять собой отдельный специальный контроллер или контроллер совместного доступа, сопряженный с другим устройством управления, например, с устройством 130 определения угла сцепки, для обработки изображений прицепа и метки, а также для выполнения соответствующих действий. В одном варианте при определении угла между прицепом и транспортным средством устройство 130 определения угла сцепки обрабатывает полученные изображения метки от контроллера 10 для контроля метки и другую информацию, например длину прицепа.
Камера 20 изображена в виде устройства ввода, которое выдает видеоизображения контроллеру 10 для контроля метки системы 105 помощи при движении задним ходом с прицепом. Камера 20 может представлять собой камеру заднего вида, установленную на буксирующем транспортном средстве в таком месте и положении, которые позволят получить изображения буксируемого прицепа, находящегося за транспортным средством. Камера 20 может представлять собой камеру, которая генерирует одно или несколько изображений прицепа, включая изображение области на прицепе, в которой должна быть установлена метка. Камера 20 может представлять собой видеокамеру, которая циклически выполняет захват нескольких последовательных изображений прицепа для обработки контроллером 10 для контроля метки. Для идентификации метки и ее положения на прицепе контроллер 10 для контроля метки обрабатывает одно или несколько изображений от камеры 20 с помощью одной или нескольких процедур 16 обработки изображения. Далее контроллер 14 для контроля метки обрабатывает уже обработанные изображения в соответствии с одной или несколькими процедурами 900, 920, 940, 960 и 990.
Контроллер 10 для контроля метки может быть соединен с одним или несколькими устройствами, включая внешние устройства 24 сигнализации транспортного средства, к которым можно отнести стоп-сигналы и аварийные проблесковые сигналы транспортного средства, обеспечивающие визуальную сигнализацию, и клаксон транспортного средства, обеспечивающий звуковую сигнализацию. Кроме того, контроллер для контроля прицепа может быть соединен с одним или несколькими человекомашинными интерфейсами 25 (HMI), включая дисплей транспортного средства, например, центральный дисплей навигационной/развлекательной системы. Также контроллер 10 для контроля прицепа может быть соединен по каналам 22 беспроводной связи с одним или несколькими карманными или портативными устройствами 26, например, с одним или несколькими смартфонами. Портативное устройство 26 может включать в себя дисплей 28 для отображения одного или нескольких изображений и другой информации пользователю. На дисплее 28 портативного устройства 26 может отображаться одно или несколько изображений прицепа и метки в пределах области установки метки. Кроме того, портативное устройство 26 может выдавать сигналы обратной связи, например, в виде визуального и звукового сигналов, свидетельствующих об установке метки.
На Фиг. 7-10 изображен процесс размещения метки 30 на прицепе 110 с помощью контроллера 10 для контроля метки, выполняющего процедуру 900 выдачи инструкции при установке метки согласно одному варианту. На Фиг. 7 и 8 представлено буксировочное транспортное средство 100, буксирующее прицеп 110. Прицеп 110 имеет сцепной соединитель прицепа в виде узла 114 сцепки (сцепного соединения), соединенного со сцепным устройством транспортного средства в виде приемного сцепного механизма и шара 15. Узел 114 сцепки фиксируется на сцепном шаре 15 для обеспечения поворотного шарнирного соединения. Изображенный прицеп 110 имеет раму с продольной балкой или дышлом 112 прицепа. Изображенная верхняя горизонтальная поверхность дышла 112 прицепа обеспечивает область 32 установки метки 30. Следует понимать, что прицеп 110 может иметь различные форму и размеры, а также одну или несколько других подходящих областей 32 установки метки 30. Область 32 установки метки является предпочтительным местом для установки метки 30.
Транспортное средство 100 оборудовано видеокамерой 20, расположенной в верхней части заднего борта транспортного средства 100. Видеокамера 20 расположена над областью (областями) установки метки, а также имеет поле обзора, расположение и направление, позволяющие получить одно или несколько изображений прицепа 110, включая одну или несколько областей установки метки. Следует понимать, что одна или несколько камер могут быть расположены в других местах транспортного средства 100 для получения изображений прицепа 110 и области (областей) 32 установки метки.
Для того чтобы установить метку на прицепе, на котором ее еще нет, пользователю 2 могут быть предоставлены инструкции по установке метки 30 на прицепе 110 в предпочтительной области 32 установки метки таким образом, чтобы камера 20 могла захватить одно или несколько изображений метки 30 для получения информации о прицепе, необходимой для системы помощи при движении задним ходом с прицепом, например, информации об угле сцепки, используемой устройством 130 определения угла поворота сцепного механизма. При этом пользователю 2 может быть выдано визуальное или звуковое сообщение от HMI транспортного средства (например, HMI 25 транспортного средства) или портативного устройства 26 с указаниями по установке метки 30 на прицепе 110. HMI 25 транспортного средства может включать в себя устройства вывода звуковых и(или) визуальных сообщений с указаниями по правильной установке метки.
Для обеспечения правильной и эффективной установки метки 30 на прицеп 110 система помощи при движении задним ходом с прицепом использует способ или процедуру 900 выдачи инструкции при установке метки, которая изображена на Фиг. 10 и которую использует контроллер 10 для контроля метки. Способ 900 выдачи инструкции при установке метки включает в себя этап 902, на котором пользователь может подключить портативное устройство с дисплеем к транспортному средству. Пользователь может установить соединение между устройством и транспортным средством по протоколу беспроводной связи согласно одному варианту. Устройство может представлять собой беспроводное устройство, способное обмениваться данными по протоколам Wi-Fi, BLUETOOTH® или другим протоколам беспроводной связи. В качестве альтернативы для подключения устройства может быть использовано проводное соединение. Затем на этапе 904 пользователь запускает процедуру настройки системы определения угла сцепки. Данная процедура включает в себя этап, на котором пользователь должен установить метку на прицеп в области установки метки. На этапе 906 система генерирует с помощью камеры одно или несколько изображений буксируемого прицепа, на котором показана предпочтительная область (области) установки метки. Областей установки метки может быть несколько, однако лишь одна из них будет предпочтительной. На этапе 908 система обрабатывает сгенерированные изображения и определяет область установки метки на прицепе. Предпочтительная область установки метки может быть определена на основании положения и ориентации камеры, требуемого расстояния до метки от сцепного соединения и конструкции прицепа. На этапе 910 система накладывает изображение метки на одно или несколько сгенерированных изображений. Наложение изображения метки представляет собой визуальную индикацию предпочтительного положения метки в области установки метки, после чего пользователь получает инструкции по установке метки. Наложение изображения метки также может включать в себя индикацию границ области установки метки или другой идентификационной информации. Наложение изображения метки может быть показано на представленном изображении в виде мигающих цветных линий (например, красных). Также может быть сгенерировано и показано несколько накладываемых изображений меток в областях установки меток. На этапе 912 по проводному или беспроводному соединению система передает одно или несколько изображений и накладываемое изображение метки на дисплей транспортного средства и на дисплей пользователя, если на этапе 902 к транспортному средству было подключено портативное устройство по проводному или беспроводному соединению. Затем на этапе 914 на дисплее пользователя на портативном устройстве отображается изображение области установки метки, обозначенной с помощью наложенного изображения метки. На этапе 916 HMI выдает пользователю указания по установке метки на прицеп в пределах области установки метки, используя представленное изображение и наложенное изображение метки на дисплее транспортного средства и(или) портативного устройства.
В качестве примера представленного изображения на Фиг. 9 на дисплее 28 портативного устройства 26 показано изображение области для установки метки, наложенное на изображение прицепа. Изображение, представленное на дисплее 28, включает в себя изображение прицепа 110, полученное камерой, а также наложенное изображение области 32 установки метки. Пользователь 2 может просмотреть изображение на дисплее 28 портативного устройства 26, чтобы определить место установки метки относительно прицепа 110. В данном примере пользователь может разместить метку 30 в области 32 установки, как показано в виде наложенного изображения метки. Установка метки может быть выполнена путем наклеивания стикера метки на поверхность прицепа. Таким образом, пользователь может использовать портативное устройство с дисплеем, например телефон, планшет или компьютер, для просмотра правильного места установки метки на прицеп до или во время установки метки на прицеп.
Таким образом, способ 900 выдачи инструкции при установке метки помогает пользователю легко, точно и эффективно установить метку 30 на прицеп 110. Пользователь 2 может легко использовать портативное устройство с дисплеем для подключения к транспортному устройству и просмотра правильного места установки метки до и во время установки метки на прицеп без необходимости возврата к транспортному средству или других действий по установке метки.
Система 105 помощи при движении задним ходом с прицепом также включает в себя способ или процедуру контроля метки для выполнения контроля местоположения метки на прицепе и выдачи пользователю сигнала обратной связи о том, что метка была установлена в подходящей области. Пользователь может установить метку на прицепе различными способами. В некоторых вариантах с помощью HMI система помощи при движении задним ходом с прицепом может выдавать пользователю указания разместить метку и инструкции, касающиеся места установки метки. Пользователь может использовать способ 900 выдачи инструкции при установке метки, который поможет ему установить метку на прицеп. В других ситуациях пользователь может установить метку на прицеп по собственному усмотрению или следуя инструкциям, напечатанным на метке или ее упаковке. В любом случае после установки метки на прицеп способ 920 контроля метки начнет контролировать положение метки относительно прицепа и выдавать сигнал обратной связи пользователю, касающийся правильности расположения метки на прицепе.
Согласно одному варианту осуществления изобретения способ 920 контроля метки изображен на Фиг. 11. На этапе 922 способ 920 требует подсоединения прицепа к транспортному средству посредством шара и сцепного механизма, если прицеп еще не сцеплен с транспортным средством. Затем на этапе 924 начинается настройка для определения угла сцепки. На этапе 926 посредством интерфейса пользователю выдается указание по установке метки на прицеп. Согласно одному варианту осуществления изобретения пользователь может установить метку на прицеп на основании заданного критерия, по собственному усмотрению или используя собственный опыт. В соответствии с другими вариантами осуществления изобретения пользователь может получить информацию о том, где установить метку на прицепе, ознакомившись с руководством пользователя, инструкцией, или с помощью другого источника звуковых или визуальных команд. Обычно метка должна быть установлена в области, находящейся в поле зрения видеокамеры и позволяющей осуществлять захват изображения и получение требуемой информации о прицепе, например, угла сцепки. В зависимости от конфигурации прицепа, а также ориентации и высоты расположения камеры может потребоваться установка метки в определенной области прицепа, находящейся на некотором расстоянии от сцепного соединения, например на расстоянии не менее 7 дюймов (17,78 см), на определенном расстоянии от бампера транспортного средства и на определенном расстоянии от земли. В некоторых случаях метку необходимо установить в месте, находящемся на определенном расстоянии от центральной продольной оси прицепа, а также в вертикальной или горизонтальной плоскости или под другим углом, т.е. между вертикальным и горизонтальным положениями. В соответствии с другим вариантом для установки метки на прицеп пользователь может использовать способ 900 выдачи инструкции при установке метки.
На этапе 928 система генерирует одно или несколько изображений области установки метки на буксируемом прицепе. Затем на этапе 930 система обрабатывает одно или несколько изображений, проверяя наличие метки в области установки метки. Область установки метки может быть определена в соответствии с несколькими критериями, такими как расстояние от сцепного соединения 114 прицепа, расстояние от центральной продольной оси прицепа, высота расположения камеры относительно прицепа и расстояние от камеры до прицепа. На этапе 932 принятия решения способа 900 определяется, была ли обнаружена метка на обработанном изображении (изображениях), при ее отсутствии способ возвращается на этап 926, на котором с помощью HMI пользователю выдается сообщение о необходимости установки метки на прицеп.
При обнаружении метки при обработке изображений на этапе 934 система помощи при движении задним ходом с прицепом выдаст пользователю сигнал обратной связи. Сигнал обратной связи может представлять собой один или несколько средств внешней сигнализации, к которым можно отнести стоп-сигналы и(или) аварийные проблесковые сигналы, обеспечивающие визуальную сигнализацию, и(или) клаксон, обеспечивающий звуковую сигнализацию. Кроме того, сигналы обратной связи могут включать в себя передачу сообщения с помощью портативного устройства 26, подачу тонового сигнала с помощью портативного устройства 26 или подачу визуальной световой индикации с помощью портативного устройства 26. Также сигналы обратной связи могут включать в себя отправку текстового сообщения или звуковых инструкций пользователю с помощью портативного устройства, например телефона или компьютера. Следует понимать, что для информирования пользователя об обнаружении правильного расположения метки могут быть использованы внешние или другие сигналы обратной связи. В качестве альтернативы сигналы обратной связи можно использовать для указания неправильного расположения метки на прицепе. После правильной установки метки на прицепе система помощи при движении задним ходом с прицепом может обработать информацию путем контроля метки для определения угла сцепки и других данных о прицепе.
Метка 30 может представлять собой стикер (наклейку) с клеем на нижней поверхности и заранее заданное стандартное изображение определенного размера и формы на верхней поверхности, которое может быть захвачено видеокамерой и распознано путем выполнения процедуры обработки. В соответствии с одним вариантом метка 30 может иметь прямоугольную форму, а также распознаваемое камерой графическое изображение, например шахматный рисунок. Обработка изображения может включать в себя известные из уровня техники процедуры распознавания графического изображения для идентификации метки и ее расположения на прицепе. Однако следует понимать, что метка может иметь другие формы, размеры и графические изображения. Также следует понимать, что в других вариантах метка может быть установлена на прицеп с помощью соединителей, например крепежных элементов, которые позволят зафиксировать метку на прицепе или на накладку, прикрепленную к прицепу. Также следует отметить, что метка может быть установлена с помощью магнита, приклеена, нарисована или установлена в соответствии с другими подходящими способами.
Следует понимать, что не у всех прицепов может быть место, подходящее для установки наклеиваемой метки на прицеп. Таким образом, в соответствии с одним вариантом осуществления место для метки может быть создано на таком прицепе с помощью системы 40 установки метки, как изображено на Фиг. 12 и 13. Изображенная система 40 установки метки прикреплена к прицепу 110 для установки метки 30 в области установки метки, находящейся в поле зрения камеры. Система 40 установки метки включает в себя вертикальную монтажную стойку или кронштейн 44 с несколькими отверстиями 46 под болты, которые проходят вертикально и позволяют выполнить необходимую регулировку высоты. Кронштейн 44 может быть установлен на прицеп посредством отверстий 54 с помощью болтов 48, шайб 52 и гаек 50. Высота кронштейна 44 может быть отрегулирована в зависимости от того, какие отверстия 46 выровнены относительно отверстий 54 в прицепе. К верхней части кронштейна 44 прикреплена пластина 42 для метки, имеющая область 32 для установки метки 30. Также пластина 42 имеет несколько отверстий 46, выровненных в горизонтальной плоскости относительно отверстий в кронштейне 44 для установки болтов 48, шайб 52 и гаек 50. Таким образом, пластина 42 может быть отрегулирована в вертикальном и горизонтальном направлениях для установки метки 30 в требуемое положение таким образом, чтобы изображение метки можно было легко получить с помощью камеры и обработать его с помощью технологии обработки. Следует понимать, что инструкции по установке системы 40 установки метки вместе с меткой 30, а также проверка правильности их установки могут быть выполнены с помощью способа 900 выдачи инструкции при установке метки и способа 920 контроля метки, описанных выше.
Способ определения перемещения метки включает в себя процедуру 940 начальной настройки и процедуру 960 последующей обработки для обнаружения перемещения метки, используемую для получения информации о прицепе. Способ определения перемещения метки определяет изменение положения метки сцепного устройства на прицепе, например, дышле, а также может определить изменение расстояния до нее. Для определения изменения положения и(или) расстояния до метки выполняется сравнение изображений метки на ранее сохраненном изображении и на новом изображении. Данное сравнение может включать в себя сравнение размеров пикселей изображений, полученных камерой. При изменении положения или расстояния пользователю посредством HMI будет выдан запрос ввода новой информации о прицепе для последующей обработки системой помощи при движении задним ходом с прицепом.
Процедура 940 начальной настройки представлена на Фиг. 14. Сначала на этапе 942 необходимо подсоединить прицеп к транспортному средству. На этапе 944 производится настройка прицепа для отслеживания угла сцепки. При использовании видеосистем данный этап может включать в себя установку наклеиваемой метки на прицеп, например, рядом с дышлом прицепа так, чтобы камера транспортного средства могла обнаружить перемещение метки во время маневров и прохождения поворотов транспортным средством. Кроме того, можно ввести несколько параметров, связанных с местом установки метки и используемых для правильного расчета угла сцепки на основании обработки изображения. К этим параметрам могут относиться расстояние от метки до земли и расстояние от метки до бампера транспортного средства. На этапе 946 происходит выдача команды для перемещения транспортного средства с прицепом вперед, что может быть достигнуто, если водитель проедет вперед в прямом направлении. Это необходимо для того, чтобы угол сцепки между транспортным средством и прицепом был приблизительно равен нулю, а прицеп располагался примерно на одной линии с транспортным средством, а также для того, чтобы на следующих этапах изображения захватывались при такой же ориентации и могли сравниваться. На этапе 948 камера позволяет получить картинку (изображение) метки и прицепа, когда транспортное средство и прицеп находятся на прямой линии, т.е. угол сцепки приблизительно равен нулю. На этапе 950 устройство обработки изображений выполняет обработку видеоданных изображения. Устройство обработки изображения может сначала обнаружить метку, а затем вычислить ее размер и расположение на основании обработки пикселов изображения. На этапе 952 происходит сохранение в памяти изображения, полученного на этапе 948, и значений, вычисленных на этапе 950. Затем для обнаружения перемещения метки используют данные об изображении и вычисленные значения. При обнаружении перемещения метки система может предположить, что прицеп был заменен другим прицепом, и выдать пользователю на HMI-интерфейс запрос ввода информации о прицепе.
На Фиг. 15 показана процедура 960 обнаружения перемещения метки, начинающаяся с этапа 962, на котором водителю предлагается подсоединить к транспортному средству прицеп, устанавливаемый ранее и использовавшийся в процедуре 940 начальной настройки. На этапе 964 вместо выбора нового прицепа система определения угла сцепки предлагает пользователю выбрать прицеп с установленными и сохраненными настройками. На этапе 966 пользователю предлагается проехать вперед по прямой, чтобы угол сцепки между транспортным средством и прицепом был приблизительно равен нулю. Затем на этапе 968 камера захватывает новое изображение метки и прицепа. На этапе 970 для обнаружения метки и расчета ее размера и расположения производится обработка пикселей изображения. На этапе 972 расположение и размеры метки, рассчитанные ранее, сравнивают с расположением и размерами метки, полученными во время начальной настройки на основании предыдущего изображения. На этапе 974 система определяет, совпадает или находится ли новая информация о метке в допустимых пределах относительно исходной информации о метке. Если на этапе 980 было определено, что метка на новом изображении имеет такие же размеры и расположение, что и на предыдущем изображении, полученном во время начальной настройки, то метка, скорее всего, осталась на прежнем месте и позволяет правильно определять угол сцепки. Если метка имеет другое расположение или другие размеры, то будет определено, что, метка была перемещена, в результате чего процедура 960 переходит на этап 976. Обнаруженное перемещение метки может возникнуть, когда используемый прицеп отличается от прицепа, выбранного пользователем в последний раз. Использование ранее выбранной конфигурации прицепа может привести к получению ошибочных результатов для отслеживаемого угла сцепки. В данном случае способ 960 переходит на этап 978, на котором пользователю (например, водителю) предлагается повторно выбрать или повторно настроить конфигурацию прицепа с использованием новой информации о прицепе и метке. Таким образом, процедура 960 обнаружения перемещения метки эффективно определяет перемещение метки, что может быть связано с присоединением нового прицепа к транспортному средству, после чего пользователю предлагается выбрать новую конфигурацию прицепа с помощью HMI. Кроме того, процедура определения перемещения метки также может определить, что после выполнения начальной настройки метка переместилась из-за установки дышла с другими размерами.
Примеры изображений, на которых произошло перемещение метки и прицепа в другое положение, представлены на Фиг. 16 и 17. Как показано на Фиг. 16, изображение прицепа и метки 30 выровнено с прицепом в первом положении по сравнению с последующим изображением на Фиг. 17, на котором метка 30 перемещена во второе ближнее положение. Изменение расположения метки может указывать на то, что прицеп был заменен новым прицепом или что метка переместилась в другое место прицепа по другой причине. В этом случае процедура 960 обнаружения перемещения метки запрашивает у пользователя новую информацию о конфигурации прицепа, чтобы не получать неправильные значения угла сцепки из-за неактуальной информации о прицепе. Однако система может продолжать указывать на наличие перемещения метки даже при выборе правильного прицепа и неизменном положении метки на прицепе. Это может быть связано с изменением длины дышла транспортного средства.
Далее контроллер 10 для контроля метки выполняет процедуру 990 контроля соединения с прицепом для определения того, подсоединен ли прицеп к транспортному средству и был ли установлен новый прицеп. При отсоединении прицепа от транспортного средства информация о метке и угле сцепки может быть недоступна в течение некоторого времени. Таким образом, способ 990 контроля соединения с прицепом контролирует доступность данных об угле сцепки и(или) обнаружение метки для определения того, отсутствуют ли эти данные в течение определенного периода времени. При получении положительного ответа водителю будет предложено заново выбрать прицеп или ввести новые данные о конфигурации прицепа через HMI, чтобы исключить вероятность использования неактуальных данных о прицепе.
На Фиг. 18 изображена процедура 990 контроля соединения с прицепом. На этапе 992 производится подсоединение прицепа к транспортному средству. На этапе 994 производится настройка значений параметров прицепа для определения и контроля угла сцепки. При использовании видеосистемы данная процедура может включать в себя установку метки на прицеп в область, контролируемую данной системой, и ввод соответствующих значений параметров. В качестве альтернативы при предварительном выполнении настройки значений параметров прицепа для контроля угла сцепки можно выбрать ранее сохраненную конфигурацию параметров данного прицепа. На этапе 996 после настройки значений параметров прицепа для определения угла сцепки система определения угла сцепки будет непрерывно отслеживать угол сцепки или метку. На этапе 998 принятия решения процедура 990 проверяет, отсутствует ли данные об угле сцепки или о метке в течение периода, превышающего X секунд.
В зависимости от типа системы определения угла сцепки отсутствие или недоступность соответствующего сигнала об угле сцепки может быть вызвана различными причинами, при этом одной из них может быть отцепление прицепа от транспортного средства. Отцепление прицепа может также привести к невозможности обнаружения метки. В данном случае производится проверка времени, прошедшего с момента потери сигнала об угле сцепки или потери метки. Если период отсутствия информации об угле сцепки или о метке не превышает X секунд, то процедура 990 возвращается на этап 996 к отслеживанию угла сцепки или метки. Если период отсутствия информации об угле сцепки или о метке превышает X секунд, то на этапе 1000 пользователю будет предложено выбрать другие настройки или внести изменения в конфигурацию прицепа с помощью HMI. Временной период X соответствует временному промежутку, необходимому для замены прицепа. Например, для небольших и легких прицепов данный период может составлять менее шестидесяти (60) секунд, поскольку в данном случае такое значение является достаточным. Согласно одному варианту временной период X составляет тридцать (30) секунд.
Хотя контроль угла сцепки выполняется для обнаружения отцепления прицепа от транспортного средства, следует понимать, что в альтернативном варианте процедура 990 контроля соединения с прицепом может быть использована для контроля обнаружения метки, например, если при невозможности обнаружения метки в течение X секунд водителю может быть предложено выбрать другую конфигурацию прицепа или изменить настройки параметров прицепа.
Следует понимать, что в описанную выше конструкцию могут быть внесены различные вариации и модификации без отступления от сущности настоящего изобретения и что сущность изобретения определена следующей формулой изобретения, если явно не указано иное.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ И СИСТЕМА ДЛЯ КОНТРОЛЯ РАЗМЕЩЕНИЯ МЕТКИ НА ПРИЦЕПЕ ТРАНСПОРТНОГО СРЕДСТВА | 2014 |
|
RU2574505C1 |
| СИСТЕМА И СПОСОБ КОНТРОЛЯ СОЕДИНЕНИЯ ТРАНСПОРТНОГО СРЕДСТВА С ПРИЦЕПОМ | 2014 |
|
RU2573691C1 |
| СИСТЕМА И СПОСОБ ОЦЕНКИ ФАКТИЧЕСКОГО УГЛА СЦЕПКИ МЕЖДУ ТРАНСПОРТНЫМ СРЕДСТВОМ И ПРИЦЕПОМ | 2015 |
|
RU2600178C2 |
| СИСТЕМА И СПОСОБ КАЛИБРОВКИ СИСТЕМЫ ПОМОЩИ ПРИ ДВИЖЕНИИ ЗАДНИМ ХОДОМ ТРАНСПОРТНОГО СРЕДСТВА С ПРИЦЕПОМ | 2015 |
|
RU2584372C1 |
| СИСТЕМА ПОМОЩИ ПРИ ДВИЖЕНИИ ЗАДНИМ ХОДОМ С ПРИЦЕПОМ В ТРАНСПОРТНОМ СРЕДСТВЕ | 2014 |
|
RU2575663C1 |
| СИСТЕМА ПОМОЩИ ПРИ ДВИЖЕНИИ ЗАДНИМ ХОДОМ С ПРИЦЕПОМ | 2015 |
|
RU2608786C2 |
| СИСТЕМА ПОМОЩИ ПРИ ДВИЖЕНИИ ТРАНСПОРТНОГО СРЕДСТВА ЗАДНИМ ХОДОМ С ПРИЦЕПОМ | 2015 |
|
RU2627219C2 |
| Мобильная система помощи водителю автомобиля с прицепом при маневрировании задним ходом | 2018 |
|
RU2694645C1 |
| СИСТЕМА ДЛЯ ОПРЕДЕЛЕНИЯ УГЛА СЦЕПКИ МЕЖДУ ТРАНСПОРТНЫМ СРЕДСТВОМ И ПРИЦЕПОМ | 2015 |
|
RU2617895C2 |
| УЗЕЛ ДАТЧИКА УГЛА СЦЕПКИ | 2015 |
|
RU2613123C2 |
Группа изобретений относится к системе помощи водителю транспортного средства с прицепом. Система помощи при размещении метки на прицепе включает в себя камеру, устройство обработки изображения и дисплей. Камера установлена на буксирующем транспортном средстве и предназначена для получения изображения прицепа. Устройство обработки изображения выполнено с возможностью обрабатывать полученное изображение для определения области размещения метки и накладывать изображение метки на изображение области для ее размещения. Дисплей выполнен с возможностью отображения изображения прицепа с наложенной меткой. Достигается повышение возможности помощи водителю при управлении транспортным средством с прицепом. 2 н. и 18 з.п. ф-лы, 18 ил.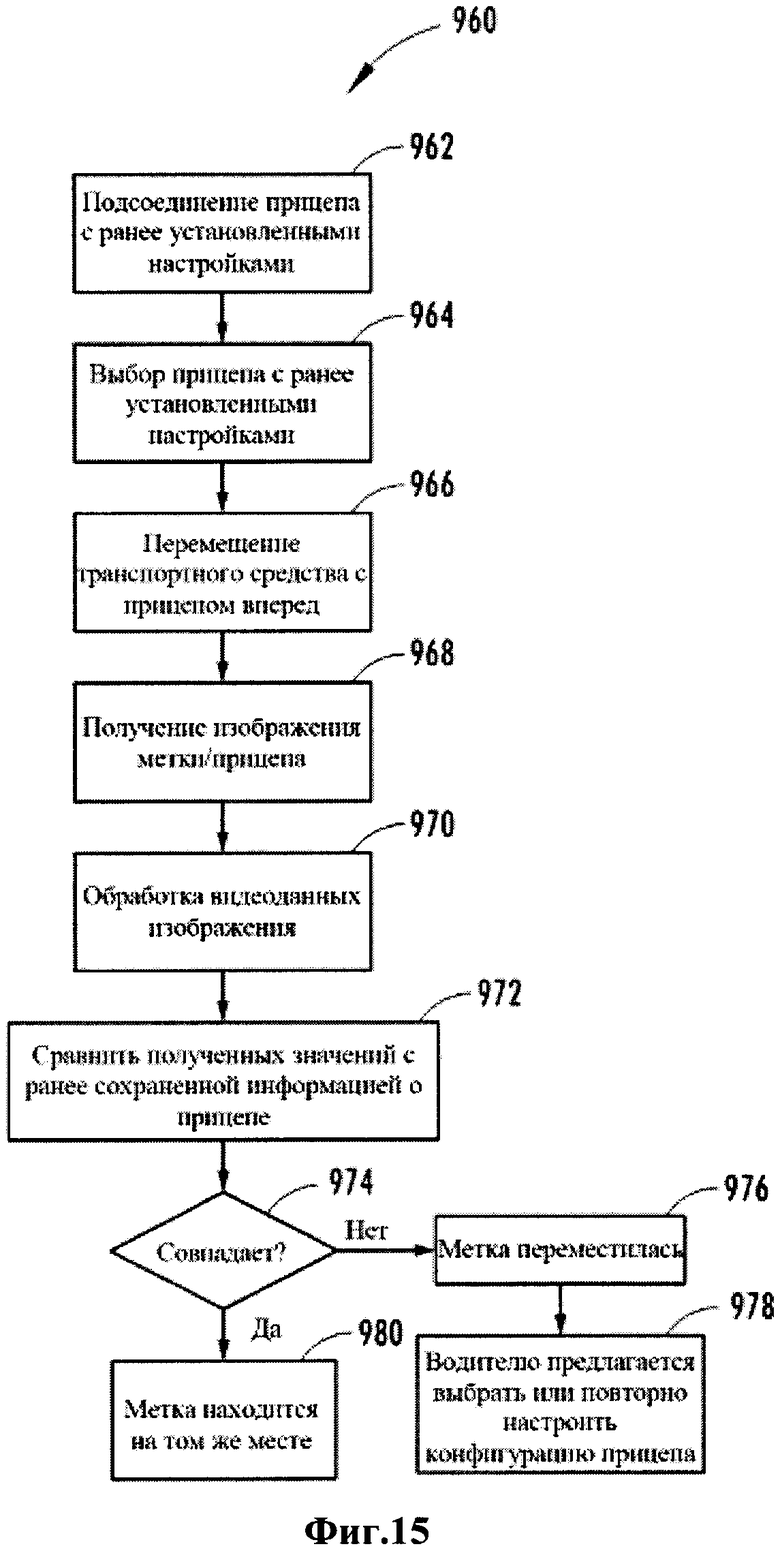
1. Способ помощи при размещении метки на прицепе, в котором получают изображение прицепа с помощью камеры на буксирующем транспортном средстве, обрабатывают изображение для определения области размещения метки, накладывают изображение метки на изображение области для ее размещения и отображают пользователю на дисплее изображение прицепа с наложенной меткой для помощи при ее размещении на прицепе.
2. Способ по п. 1, в котором дисплей является портативным.
3. Способ по п. 1, в котором дополнительно передают изображение прицепа с наложенной меткой на портативное устройство с дисплеем.
4. Способ по п. 3, в котором передают изображение прицепа с наложенной меткой на портативное устройство по каналу беспроводной связи.
5. Способ по п. 4, в котором портативный дисплей представляет собой портативный телефон.
6. Способ по п. 1, в котором получают изображение прицепа с помощью камеры, установленной на задней стороне буксирующего транспортного средства.
7. Способ по п. 1, в котором получают несколько изображений прицепа с помощью видеокамеры, причем полученные видеоизображения затем обрабатывают.
8. Способ по п. 1, предназначенный для использования в системе помощи при движении задним ходом с прицепом для оказания помощи при движении задним ходом транспортного средства с подсоединенным к нему прицепом.
9. Способ по п. 8, в котором метка предназначена для определения угла сцепки.
10. Способ по п. 1, в котором дополнительно генерируют инструкции для пользователя по размещению метки на прицепе и передают инструкции на портативное устройство.
11. Система помощи при размещении метки на прицепе, которая включает в себя камеру, установленную на буксирующем транспортном средстве и предназначенную для получения изображения прицепа, устройство обработки изображения, выполненное с возможностью обрабатывать полученное изображение для определения области размещения метки и накладывать изображение метки на изображение области для ее размещения, а также дисплей для отображения изображения прицепа с наложенной меткой для помощи при ее размещении на прицепе.
12. Система по п. 11, в которой дисплей является портативным.
13. Система по п. 11, дополнительно включающая в себя передатчик для передачи изображения прицепа и наложения метки на портативное устройство с дисплеем.
14. Система по п. 13, в которой передатчик представляет собой беспроводной передатчик для передачи изображения прицепа с наложенной меткой на прицепе по каналу беспроводной связи.
15. Система по п. 13, в которой портативное устройство представляет собой портативный телефон.
16. Система по п. 11, в которой камера установлена на задней стороне буксирующего транспортного средства.
17. Система по п. 11, в которой камера представляет собой видеокамеру, создающую несколько видеоизображений.
18. Система по п. 11, в которой система помощи в размещении метки на прицепе предназначена для использования в системе помощи при движении задним ходом с прицепом для оказания помощи при движении задним ходом транспортного средства с подсоединенным к нему прицепом.
19. Система по п. 18, в которой метка предназначена для определения угла сцепки.
20. Система по п. 11, в которой на дисплее отображаются инструкции для пользователя по размещению метки на прицепе.
| WO 2012103193 A1, 02.08.2012 | |||
| US 2010324770 A1, 23.12.2010 | |||
| US 2012185131 A1, 19.07.2012 | |||
| US 8068019 B2, 29.11.2011. |

