Настоящее изобретение относится к устройству магнитного подшипника с магнитным устройством, которое выполнено кольцеобразным и имеет центральную ось, для удержания вала с возможностью поворота посредством магнитных сил на центральной оси.
В обычных радиальных магнитных подшипниках, которые не имеют постоянно возбужденного предварительного намагничивания, известно применение обмотки трехфазного тока для генерации стационарного предварительного намагничивания. Для этого можно сослаться, например, на публикацию DE 2358527 А1. Представленный там активный магнитный подшипник оснащен вращательным приводом, состоящим из статора и ротора с воздушным зазором, контролируемым датчиками. На вращающееся магнитное поле, вырабатываемое за счет возбуждения обмоток статора трехфазным током, накладывается управляющее поле, которое генерируется обмотками в статоре посредством выходных токов усилителей.
Кроме того, публикация ЕР 2148104 А1 раскрывает магнитный радиальный подшипник, который имеет расположенные распределенным образом в окружном направлении электромагниты. Электромагниты имеют общую катушку для генерации предварительного намагничивания и многофазного вращающегося магнитного поля. Первые и вторые половины катушек соединены вместе в нулевой точке в соединении звездой. Обе нулевые точки предусмотрены для подключения к источнику питания постоянного тока для возбуждения предварительного намагничивания. Остальные концы катушек предусмотрены для параллельного подключения к соответствующему многофазному преобразователю-регулятору напряжения трехфазного (переменного) тока для возбуждения вращающегося магнитного поля.
Магнитные подшипники служат для установки вращающихся валов. При этом они должны компенсировать силу тяжести, которая статически действует на вал. Кроме того, они должны также компенсировать и другие предварительно определенные силы, например силы, образованные из-за дисбаланса. Для компенсации этих предопределенных сил и одновременно для центрирования вала необходимо соответствующим образом проектировать управление или регулирование магнитного подшипника, а также катушки магнитного подшипника.
Из публикации DE 2342767 А1 также известно типовое устройство магнитного подшипника. При этом, например, в постоянном магните чашеобразной формы размещен электромагнит, и оба они взаимодействуют с дополнительным подвешенным над ними постоянным магнитом.
В публикации WO 95/20260 А1 раскрыта индукционная машина со специальной обмоткой для комбинированной генерации крутящего момента и поперечного усилия. Подобная электрическая машина с установленным в магнитных подшипниках ротором также известна из публикации DE 9112183 U1.
Кроме того, в публикации US 3791704 А раскрыт магнитный подшипник, в котором постоянные магниты по своему положению регулируются с возможностью перестановки посредством винта.
Таким образом, задача настоящего изобретения состоит в том, чтобы предложить устройство магнитного подшипника, которое может быть изготовлено более экономичным образом. Кроме того, должен быть предложен усовершенствованный способ для установки в магнитных подшипниках вращающегося вала, с помощью которого могут компенсироваться предопределенные силы, действующие на вал.
В соответствии с изобретением эта задача решается устройством магнитного подшипника согласно пункту 1 формулы изобретения.
Предпочтительным образом, установка в подшипниках вала осуществляется с помощью двух различных независимых друг от друга устройств магнитных подшипников. Первое устройство магнитного подшипника обеспечивает то, что вал удерживается на центральной оси подшипника, а второе устройство магнитного подшипника, кроме того, ответственно за то, чтобы компенсировать предопределенную силу, действующую на вал. С помощью этого разделения функций первое устройство магнитного подшипника может быть спроектировано заметно меньшим, так как оно не должно дополнительно, например, постоянным образом также компенсировать силу тяжести. Тем самым, в частности, также можно уменьшать определение размеров электронных компонентов для устройства магнитного подшипника.
В одной форме выполнения второе магнитное устройство может иметь постоянные магниты. Это предпочтительно, в частности, в том случае, когда сила тяжести вала должна компенсироваться, так как тогда для этой компенсации не требуется электрический ток, так как необходимая магнитная сила прикладывается за счет одного или нескольких постоянных магнитов.
В особенности, радиальное расстояние между постоянным магнитом и центральной осью первого магнитного устройства для компенсации предопределенной силы может быть регулируемым посредством встроенного в устройство магнитного подшипника регулирующего устройства. Это было бы, например, предпочтительным в том случае, когда предопределенная сила может изменяться. Если, например, масса на валу или в подшипнике изменяется, то изменяется и подлежащая компенсации сила тяжести, так что предпочтительным является соответствующее регулирование. Если на валу или в подшипнике возникают дисбалансы, то также является предпочтительным эти дисбалансы посредством регулирования соответствующим образом компенсировать.
Второе магнитное устройство выполнено кольцеобразным и расположено концентрично к первому магнитному устройству. Тем самым могут компенсироваться предопределенные силы во всех радиальных направлениях.
Специальным образом, первое магнитное устройство имеет первую систему катушек, а второе магнитное устройство - вторую систему катушек, а также каждая система катушек имеет, соответственно, несколько пар полюсов, и количество пар полюсов второй системы катушек точно на единицу меньше или больше, чем количество пар полюсов первой системы катушек. За счет этого усиливаются два полюса одного направления (например, северного полюса; один из первого магнитного устройства, а другой из второго магнитного устройства) на одной стороне устройства магнитного подшипника, а на противолежащей стороне ослабляются два полюса противоположного направления (северный полюс и южный полюс; один из первого магнитного устройства, а другой из второго магнитного устройства).
Тем самым можно целенаправленно генерировать силу в направлении усиливающихся полюсов.
Кроме того, устройство магнитного подшипника может иметь первый преобразователь переменного тока (инвертор) для управления первым магнитным устройством и второй преобразователь переменного тока для управления вторым магнитным устройством. Тем самым устройство подшипника может снабжаться, например, от системы постоянного напряжения, как это типично предоставляется в распоряжение в электрических транспортных средствах или гибридных транспортных средствах.
Если предопределенной силой является сила тяжести, то является предпочтительным, если второе магнитное устройство имеет второе регулирующее устройство, посредством которого второе магнитное устройство может регулироваться для компенсации действующей на вал силы тяжести. Тем самым больше не требуется, чтобы первое магнитное устройство компенсировало силу тяжести, так что оно может быть выполнено с соответственно уменьшенными размерами.
Если предопределенная сила вызывается из-за дисбаланса вала или на валу или в подшипнике, то второе магнитное устройство может иметь второе регулирующее устройство, с помощью которого второе магнитное устройство может регулироваться для компенсации предопределенной силы. Тем самым становится возможным компенсировать также динамические силы, которые могут действовать в различных радиальных направлениях.
Настоящее изобретение далее поясняется более подробно со ссылками на чертежи, на которых показано следующее:
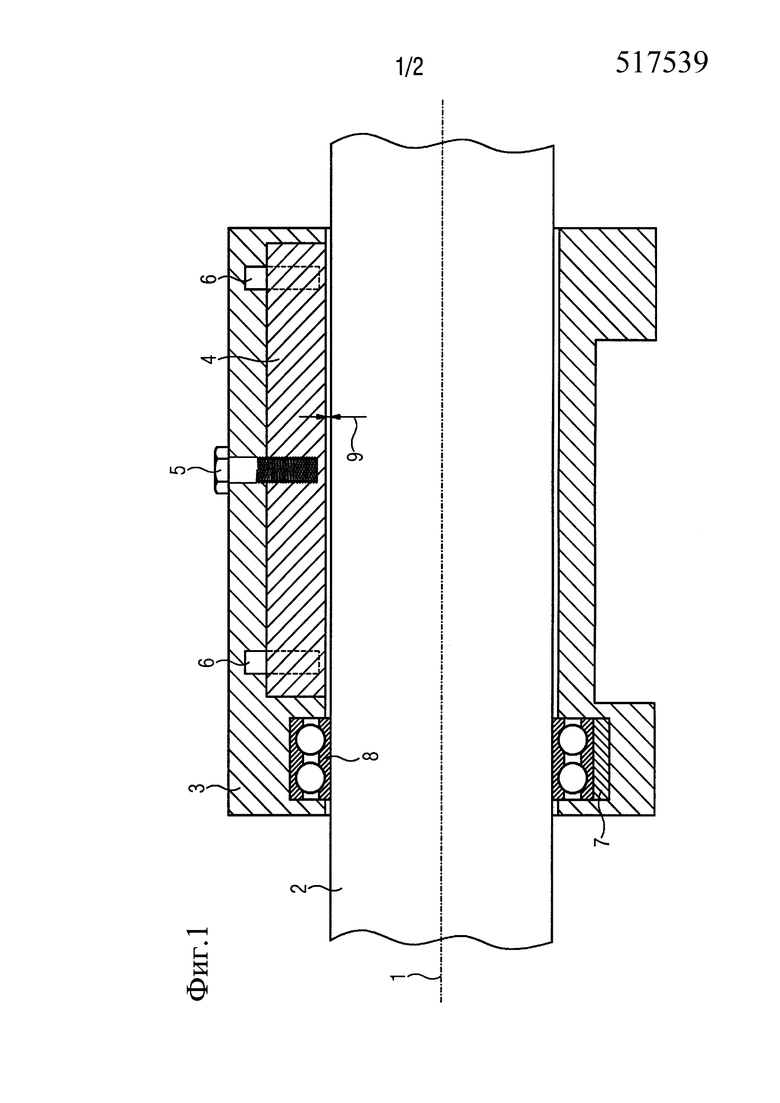
Фиг. 1 - поперечное сечение магнитного подшипника с постоянными магнитами для компенсации силы тяжести;
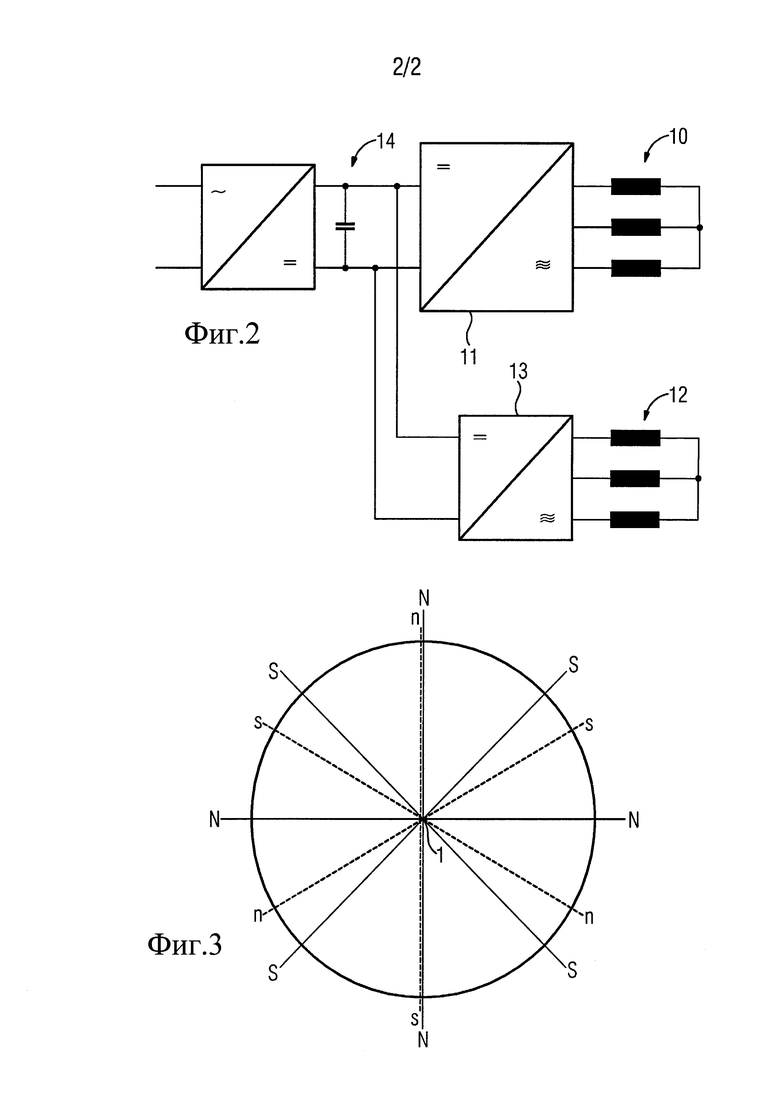
Фиг. 2 - схема преобразователя переменного тока для работы устройства магнитного подшипника с двумя системами катушек; и
Фиг. 3 - конфигурация магнитного поля соответствующего изобретению магнитного подшипника.
Описанные ниже примеры выполнения представляют предпочтительные формы выполнения предложенного изобретения.
В примере на фиг. 1 представлено продольное сечение магнитного подшипника. Он имеет центральную ось 1, вокруг которой с возможностью поворота должен устанавливаться вал 2. Кроме того, магнитный подшипник имеет корпус 3, в котором размещены магнитные устройства для установки в подшипниках. Типичным образом подобный магнитный подшипник имеет первое магнитное устройство, которое служит для центрирования вала 2. Это первое магнитное устройство на фиг. 1 для наглядности чертежа не показано. Оно содержит систему катушек с несколькими катушками, которые размещены распределенным образом по окружности.
На вал действует сила тяжести, которая в представлении на фиг. 1 направлена вниз. Поэтому в устройстве магнитного подшипника, здесь внутри корпуса 3, предусмотрено дополнительное второе магнитное устройство, которое противодействует силе тяжести. В примере на фиг. 1 второе магнитное устройство имеет постоянный магнит 4. Постоянный магнит 4 может состоять из нескольких отдельных магнитов. Он имеет, при рассмотрении в осевом направлении, предпочтительно дугообразную форму, причем его расстояние от вала 2 предпочтительным образом повсюду одинаково.
Посредством центрального винта 5 магнитная сила, воздействующая на вал 2, может устанавливаться посредством изменения расстояния до вала. Если вместо постоянного магнита применяется электромагнит, то напряженность поля и тем самым сила притяжения дополнительно или альтернативно реализуется за счет изменения электрического тока.
Слева и справа от винта 5 могут предусматриваться направляющие штифты 6, чтобы направлять постоянный магнит 4, если его расстояние от вала 2 изменяется. Установка расстояния между постоянным магнитом 4 и валом 2 может осуществляться, например, с помощью динамометрического датчика 7. Если в примере на фиг. 1 устройство магнитного подшипника имеет улавливающий подшипник 8, то этот улавливающий подшипник 8 через динамометрический датчик 7 может опираться на корпус 3. Улавливающий подшипник 8 может представлять собой, например, свободный шарикоподшипник, который при отказе магнитного подшипника механически улавливает вал 2. Если теперь расстояние между постоянным магнитом 4 и валом 2 устанавливается таким образом, что сила тяжести вала 2 предпочтительно компенсируется, то динамометрический датчик 7 еще измеряет вес улавливающего подшипника 8. Тем самым можно оптимально установить компенсацию силы тяжести посредством второго магнитного устройства (здесь постоянного магнита 4).
Расстояние между постоянным магнитом 4 и валом 2 может сокращаться до тех пор, пока не будет достигнута фиксация без проворачивания вала 4. Тем самым магнит 4 может применяться как своего рода тормоз со стопорным устройством. В случае генераторов ветровой энергии можно, таким образом, проще выполнять ремонтные работы.
В одном выполнении магнитного подшипника магнит, как уже упоминалось, имеет кривизну, которая примерно соответствует внешнему радиусу вала 2. Так, воздушный зазор 9 между валом и магнитом может сокращаться, а эффективная сила магнита может повышаться.
В другом выполнении магнитного подшипника изменение расстояния 9 между магнитом 4 и валом 2 автоматизировано. Изменение расстояния может осуществляться управляемым или регулируемым образом. Параметром регулирования является, например, сила, измеряемая динамометрическим датчиком 7. На основе этой силы может выполняться регулирование, причем предпочтительно устанавливаются максимальное и минимальное значения силы. В контуре регулирования для регулирования силы, в котором расстояние от магнита 4 до вала 2 является параметром регулирования, может устанавливаться минимальное значение параметра регулирования, спадание ниже которого не допускается.
Если вал 2 должен иметь немагнитный материал, то вал может быть оснащен магнитной кольцевой насадкой (манжетой). Она может также выполняться из листов, чтобы минимизировать вихревые токи. Для минимизации потерь на вихревые токи также можно снабдить вал из магнитомягкого материала соответствующей манжетой.
Представленный на фиг. 1 подшипник может также, что не заявляется здесь, представлять собой механический подшипник с магнитным компенсационным блоком. В этом случае представленный на фиг. 1 подшипник 8 был бы обычным подшипником качения (например, шариковым или роликовым подшипником) и не потребовалось бы предусматривать первое магнитное устройство для центрирования вала. Даже при простом стационарном магнитном поле второго магнитного устройства (постоянного магнита 2), которое снижает действующую на подшипник весовую нагрузку, за счет этой разгрузки можно, таким образом, достичь увеличенного срока службы подшипника. Это может иметь преимущество в том случае, если замена подшипников является трудно реализуемой и сопряженной с высокими затратами (например, в морских ветроэнергоцентрах).
На основе фиг. 2 и 3 далее поясняется пример выполнения соответствующего изобретению устройства магнитного подшипника, в котором второе магнитное устройство для компенсации предопределенной силы, действующей на вал (например, силы тяжести или сил, вызванных дисбалансом), имеет электромагнит. Схема на фиг. 2 показывает возможную схемотехническую структуру подобного устройства магнитного подшипника. Устройство содержит для центрирования вала (на фиг. 2 не показано), например, трехфазную систему 10 катушек. Преобразователь 11 переменного тока питает эту первую систему 10 катушек. Кроме того, преобразователь 11 переменного тока имеет управляющее или регулирующее устройство, чтобы регулировать токи через первую систему 10 катушек таким образом, что предопределенная сила, воздействующая на вал, компенсируется посредством магнитного поля системы 10 катушек. Соответствующий контур регулирования, с помощью которого, например, измеряется сила, действующая на вал 2, или смещение вала относительно центральной оси 1 на фиг. 2 не показаны.
Устройство магнитного подшипника, кроме того, содержит второе магнитное устройство, которое содержит вторую систему 12 катушек. Обе системы 10 и 12 катушек являются независимыми одна от другой, и вторая система 12 катушек здесь также управляется от отдельного преобразователя 13 переменного тока. Этот преобразователь 13 переменного тока и здесь формирует трехфазный ток для трехфазной системы 12 катушек.
Снабжение обоих преобразователей 11 и 13 переменного тока осуществляется в данном примере через промежуточный контур 14. Промежуточный контур 14 запитывается, в свою очередь, от выпрямителя, который выпрямляет, например, однофазный переменный ток.
Также второй преобразователь 13 переменного тока может иметь устройство регулирования, с помощью которого можно регулировать вызванные второй системой катушек магнитные силы компенсации в зависимости от различных измеряемых параметров. Так для определения дисбаланса можно измерять ускорение или отклонение вала и подавать на регулятор, встроенный в преобразователь 13 переменного тока.
Регулятор во втором преобразователе 13 переменного тока может иметь меньшую точность регулирования, чем регулятор в первом преобразователе 11 переменного тока, так как последний должен обеспечивать точное центральное позиционирование ротора.
Со схемой согласно фиг. 2 можно реализовать магнитное поле, которое схематично показано на фиг. 3. При этом следует отметить, что первое магнитное устройство с первой системой 10 катушек и второе магнитное устройство со второй системой 12 катушек выполнены, соответственно, кольцеобразными и размещены концентрично. За счет этого магнитные поля обоих магнитных устройств перекрываются так, как показано на фиг. 3.
Пример согласно фиг. 3 также относится к первому магнитному устройству с восьмиполюсной обмоткой. То есть система 10 катушек имеет восемь распределенных по окружности полюсов и, тем самым, число р=4 пары полюсов. Второе магнитное устройство, напротив, имеет шестиполюсную обмотку. То есть вторая система 12 катушек имеет шесть полюсов, распределенных по окружности, и, тем самым, число р=3 пары полюсов. На фиг. 3 восемь полюсов первой системы катушек, которая отвечает за центрирование вала, обозначены большими буквами N и S. Шесть распределенных по окружности полюсов второй системы 12 катушек обозначены буквами n и s. В положении, соответствующем 12 часам, полюса обеих систем катушек перекрываются, как и в положении, соответствующем 6 часам. Если теперь обе системы 10 и 12 катушек обтекаются током так, что получаются представленные на фиг. 3 магнитные полюса, то магнитные поля в верхней половине кольцеобразной конфигурации магнитов усиливаются, так как, соответственно, северные полюса N, n и южные полюса S, s находятся очень близко. В противоположность этому, в нижней половине конфигурации магнитов, соответственно, южный полюс S, s и северный полюс N, n находятся очень близко. Из-за этого происходит ослабление соответствующего магнитного поля. К моменту времени при совокупности магнитов согласно фиг. 3, волна, пробегающая также внутри устройства магнитного подшипника, была бы отклонена вверх. Это могло бы служить для компенсации силы тяжести. Подобная совокупность магнитов может также динамически поворачиваться в самых различных направлениях, так что тем самым, например, может компенсироваться дисбаланс.
Если, например, во время функционирования тела вращения (вала с соответственно установленными компонентами) устанавливается дисбаланс, то этот дисбаланс может компенсироваться с помощью описанного устройства магнитного подшипника. В принципе, можно вместо второй системы 12 катушек, как отмечалось выше, использовать постоянный магнит 4, воздушный зазор которого по отношению к телу вращения может изменяться регулируемым образом.
В другой форме выполнения изобретения магнит может использоваться для того, чтобы, например, в целях тестирования возбуждать или ослаблять колебание в теле вращения.
| название | год | авторы | номер документа |
|---|---|---|---|
| МАГНИТНЫЙ ПОДШИПНИК | 2022 |
|
RU2812255C1 |
| ВЕТРОВАЯ СИСТЕМА ГЕНЕРИРОВАНИЯ ЭЛЕКТРОЭНЕРГИИ, СИСТЕМА ПОСТОЯННЫХ МАГНИТОВ И ПРЕОБРАЗОВАТЕЛЬ ЭЛЕКТРОЭНЕРГИИ В МЕХАНИЧЕСКУЮ СИЛУ | 2004 |
|
RU2383778C2 |
| МАССАЖНОЕ УСТРОЙСТВО | 2008 |
|
RU2388451C1 |
| УСТРОЙСТВО УВЕЛИЧЕНИЯ ДОПУСТИМОЙ ОСЕВОЙ НАГРУЗКИ В ПОДШИПНИКОВОЙ СИСТЕМЕ РОТОРА | 2003 |
|
RU2372535C2 |
| Электродвигатель | 1979 |
|
SU855869A1 |
| Универсальный каскадный многофазный аксиальный магнитоэлектрический генератор | 2017 |
|
RU2704805C2 |
| БЕСКОНТАКТНАЯ ЭЛЕКТРИЧЕСКАЯ МАШИНА С АКСИАЛЬНЫМ ВОЗБУЖДЕНИЕМ | 2010 |
|
RU2437201C1 |
| БЕСКОНТАКТНАЯ РЕДУКТОРНАЯ ЭЛЕКТРИЧЕСКАЯ МАШИНА С КОМБИНИРОВАННЫМ ВОЗБУЖДЕНИЕМ | 2009 |
|
RU2390086C1 |
| БЫТОВОЙ ПРИБОР ДЛЯ УХОДА ЗА БЕЛЬЕМ, СОДЕРЖАЩИЙ УСТРОЙСТВО КОМПЕНСАЦИИ ДИСБАЛАНСА С ЭЛЕКТРОМАГНИТОМ, И СПОСОБ РАБОТЫ ТАКОГО БЫТОВОГО ПРИБОРА | 2016 |
|
RU2683362C1 |
| ГЕНЕРАТОР ДЛЯ ВЕТРОВОЙ ЭНЕРГЕТИЧЕСКОЙ УСТАНОВКИ | 2022 |
|
RU2797718C1 |
Изобретение относится к устройству магнитного подшипника. Устройство магнитного подшипника содержит первое магнитное устройство, которое выполнено кольцеобразным и имеет центральную ось (1), для удержания вала (2) с возможностью поворота посредством магнитных сил на центральной оси, второе магнитное устройство, которое является независимым от первого магнитного устройства, для компенсации предопределенной силы, которая воздействует на вал (2), причем второе магнитное устройство выполнено кольцеобразным и расположено концентрично к первому магнитному устройству. Первое магнитное устройство имеет первую систему (10) катушек, а второе магнитное устройство имеет вторую систему (12) катушек, каждая система катушек имеет соответственно множество пар полюсов, и количество пар полюсов второй системы (12) катушек точно на единицу меньше, чем количество пар полюсов первой системы (10) катушек. Первое магнитное устройство служит для центрирования вала (2), а второе магнитное устройство противодействует силе тяжести. Таким способом может компенсироваться сила тяжести или силы, вызванные дисбалансом. Технический результат: создание усовершенствованного способа для установки в магнитных подшипниках вращающегося вала, с помощью которого могут компенсироваться предопределенные силы, действующие на вал. 5 з.п. ф-лы, 3 ил.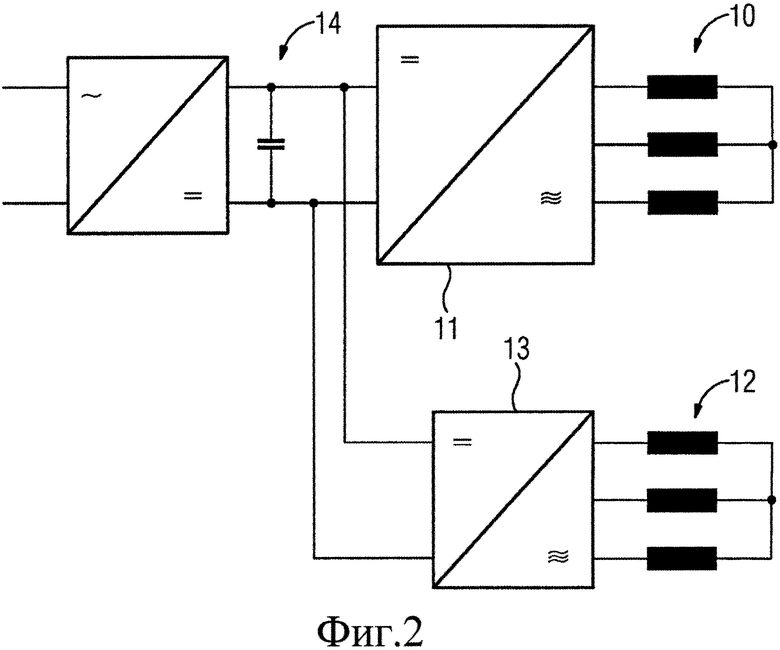
1. Устройство магнитного подшипника с
- первым магнитным устройством, которое выполнено кольцеобразным и имеет центральную ось (1), для удержания вала (2) с возможностью поворота посредством магнитных сил на центральной оси,
- вторым магнитным устройством, которое является независимым от первого магнитного устройства, для компенсации предопределенной силы, которая воздействует на вал (2), причем второе магнитное устройство выполнено кольцеобразным и расположено концентрично к первому магнитному устройству,
- первое магнитное устройство имеет первую систему (10) катушек, а второе магнитное устройство имеет вторую систему (12) катушек, каждая система катушек имеет соответственно множество пар полюсов, и количество пар полюсов второй системы (12) катушек точно на единицу меньше, чем количество пар полюсов первой системы (10) катушек,
- причем первое магнитное устройство служит для центрирования вала (2), и второе магнитное устройство противодействует силе тяжести.
2. Устройство магнитного подшипника по п. 1, причем второе магнитное устройство имеет постоянный магнит (4).
3. Устройство магнитного подшипника по п. 2, причем радиальное расстояние между постоянным магнитом (4) и центральной осью первого магнитного устройства для компенсации предопределенной силы является регулируемым за счет встроенного в устройство магнитного подшипника первого регулирующего устройства.
4. Устройство магнитного подшипника по любому из пп. 1-3, которое содержит первый преобразователь (11) переменного тока для управления первым магнитным устройством и второй преобразователь (13) переменного тока для управления вторым магнитным устройством.
5. Устройство магнитного подшипника по п. 1 или 2, причем предопределенной силой является сила тяжести, и второе магнитное устройство имеет второе регулирующее устройство, посредством которого второе магнитное устройство может регулироваться для компенсации действующей на вал (2) силы тяжести.
6. Устройство магнитного подшипника по п. 1 или 2, причем предопределенная сила вызывается из-за дисбаланса вала или на валу, и второе магнитное устройство имеет второе регулирующее устройство, с помощью которого второе магнитное устройство может регулироваться для компенсации предопределенной силы.
| US 6043580 A, 28.03.2000 | |||
| Магнитный опорный узел ротора с постоянными магнитами для восприятия радиальных усилий на опорах | 1989 |
|
SU1711681A3 |
| US 5939813 A, 17.08.1999 | |||
| АСИНХРОННЫЙ ВЕНТИЛЬНЫЙ КАСКАД | 2007 |
|
RU2342767C1 |
| СПОСОБ ОБРАБОТКИ МАГНИЕВЫХ СПЛАВОВ | 1998 |
|
RU2148104C1 |

