Область техники, к которой относится изобретение
Изобретение относится к подшипникам, в частности, к магнитным подшипникам.
Уровень техники
Из патента RU124339 известен магнитный подшипник, содержащий кольцеобразный постоянный магнит, установленный на валу, и кольцеобразный постоянный магнит, установленный в корпусе подшипника. Магниты сориентированы так, что отталкиваются друг от друга, обеспечивая тем самым подвешивание вала относительно корпуса подшипника.
Недостатком такой конструкции магнитного подшипника является то, что он является пассивным, что может приводить к продолжительным колебаниям вала относительно корпуса подшипника при импульсном механическом воздействии на вал, приводящем к его отклонению от заданного расположения.
Раскрытие изобретения
Задачей изобретения является обеспечение быстрому гашению колебаний вала при импульсных механических воздействиях на вал, приводящих к его отклонению от заданного расположения.
Задача настоящего изобретения решается с помощью магнитного подшипника, включающего в себя магнитопровод, выполненный с возможностью охвата вала; по меньшей мере, четыре пары магнитных полюсов, направленных от магнитопровода к месту нахождения вала; по меньшей мере, две пары постоянных магнитов, размещенных в/около двух парах магнитных полюсов, отделенных друг от друга по контуру магнитопровода магнитными полюсами без постоянных магнитов; по меньшей мере, две пары токовых катушек, размещенных около двух пар магнитных полюсов, отделенных друг от друга по контуру магнитопровода магнитными полюсами без токовых катушек. По меньшей мере, одна пара токовых катушек, отделенных друг от друга по контуру магнитопровода токовыми катушками другой пары, выполнены с возможностью пропускания однонаправленных токов.
Магнитопровод может быть кольцеобразным или цилиндрическим и/или собранным из нескольких элементов. В предпочтительном варианте магнитопровод может быть снабжен восемью полюсами. Полюса по меньшей мере одной пары полюсов предпочтительно могут быть расположены друг относительно друга под углом от 150° до 210° или от 165° до 195° или от 175° до 185° или 180° относительно места нахождения оси вала. Полюса по меньшей мере двух пар полюсов предпочтительно могут быть расположены друг относительно друга под углом от 60° до 120° или от 75° до 105° или от 85° до 95° или 90° относительно места нахождения оси вала.
В преимущественном варианте по меньшей мере, одна пара токовых катушек может быть размещена около пары магнитных полюсов, в/около которых размещены постоянные магниты. В другом варианте по меньшей мере, одна пара токовых катушек может быть размещена около пары магнитных полюсов, являющихся соседними для магнитных полюсов, в/около которых размещены постоянные магниты. Постоянные магниты могут представлять собой V-образные магниты.
В предпочтительном варианте, по меньшей мере одна пара токовых катушек, отделенных друг от друга по контуру магнитопровода токовыми катушками другой пары, могут иметь параллельное электрическое соединение. Такое параллельное электрическое соединение может быть выполнено с использованием цепей, корректирующих ток, протекающий через одну или обе токовые катушки.
В другом варианте, по меньшей мере одна пара токовых катушек, отделенных друг от друга по контуру магнитопровода токовыми катушками другой пары, могут быть снабжены выводами, установленными с возможностью получения однонаправленных токов. В таком случае по меньшей мере одна токовая катушка может быть соединена с выводами с помощью цепей, корректирующих ток, протекающий через токовую катушку.
Магнитный подшипник в предпочтительном варианте дополнительно содержит, по меньшей мере, один датчик отклонения вала от заданного положения. По меньшей мере, один такой датчик может быть установлен с возможностью определения отклонения вала в сторону токовой катушки, входящей в пару токовых катушек, отделенных друг от друга по контуру магнитопровода токовыми катушками другой пары и выполненных с возможностью пропускания однонаправленных токов. Магнитный подшипник в некоторых варианта может дополнительно содержать цепь корректировки положения вала, выполненную с возможностью получения сигнала, по меньшей мере, от одного датчика отклонения вала от заданного положения и формирования токов, подаваемых, по меньшей мере, на одну пару токовых катушек, отделенных друг от друга по контуру магнитопровода токовыми катушками другой пары и выполненных с возможностью пропускания однонаправленных токов.
Техническим результатом настоящего изобретения является повышение жесткости подшипника при минимуме энергозатрат. Технический результат достигается за счет того, что в состав подшипника введены токовые катушки, позволяющие активно компенсировать и уменьшать отклонения вала от заданного положения при любых механических воздействиях на вал, а расположение постоянных магнитов и токовых катушек обеспечивает практически нулевое энергопотребление при отсутствии механических воздействий на вал.
Предложенная конструкция также упрощает управление токовыми катушками подшипника, необходимое для активной компенсации отклонений вала от заданного положения, что упрощает конструкцию и снижает требования к цепям (элементам, устройствам) управления токовыми катушками подшипника. Такое упрощение достигается за счет того, что токовые катушки располагаются парами, компенсирующие тока на которые подаются однонаправленно (синфазно).
Также обеспечивается высокая линейность зависимости силы воздействия токовыми катушками на вал как от величины смещения вала, так и амплитуды тока в катушках. Выбором соответствующего алгоритма управления током катушек можно обеспечить подвешивание вала при практически нулевом энергопотреблении.
Краткое описание чертежа
На чертеже представлен магнитный подшипник в соответствии с изобретением в поперечном сечении.
На ней обозначены:
1 - корпус-магнитопровод;
2 - постоянный магнит;
3 -токовая катушка;
4 - вращающийся вал.
Осуществление изобретения
Далее изобретение описано по отношению к фигуре, на которой представлен предпочтительный вариант осуществления изобретения. Описываемый предпочтительный вариант, показанный на фигуре, не является ограничивающим объем охраны изобретения и предназначен лишь для пояснения его сущности. Описание дано в отношении устройства, показанного на фигуре, а также других возможных вариантов его осуществления, которые не исчерпываются представленными на фигуре и в описании. Объем охраны изобретения определяется последующей формулой изобретения. При необходимости в формуле изобретения могут быть приведены признаки из описания с целью более точного определения объема охраны.
Описание изобретения дано для магнитного подшипника в ориентации, показанной на фигуре, в соответствии с которой вал проходит перпендикулярно изображению (от наблюдателя), магнитопровод имеет кольцеобразную форму, расположенную в плоскости фигуры, а пары полюсов с постоянными магнитами и токовыми катушками расположены горизонтально и вертикально. Однако такое расположение не ограничивает объем охраны изобретения и дано лишь в целях упрощения пояснения. В общем случае, определяемом формулой изобретения, ориентация магнитного подшипника не является однозначно заданной и может меняться. В соответствии с изменением ориентации магнитного подшипника изменяется и расположение его частей и вала в пространстве.
На чертеже показан магнитный подшипник в соответствии с изобретением, который также может называться магнитный подшипник с низким энергопотреблением на основе гибридных магнитов или активный магнитный подшипник. Предполагаемая область применения такого подшипника - подвесы валов двигателей, компрессоров, турбин и т.п., когда условия эксплуатации не позволяют применять обычные подшипники (повышенные нагрузки и скорости вращения, работа в условиях искусственного вакуума или низких температур, когда невозможно применение смазки и др.).
Такой магнитный подшипник состоит из магнитопровода 1, внутри которого может размещаться вал 4 с возможностью вращения вала относительно магнитопровода. Таким образом, магнитопровод 1 охватывает вал 4, то есть располагается вокруг него по всему или большей части контура (периметра).
Магнитопровод, охватывающий вал, может иметь кольцеобразную или цилиндрическую форму или любую другу форму как снаружи, так и внутри при условии обеспечения возможности вращения вала между полюсами магнитопровода. Магнитопровод выполнен с использованием магнитопроводящего материала, например, ферромагнетика.
Магнитопровод может быть цельным, в таком случае он может быть литым или вырезанным/отфрезерованным из одного куска металла. В другом варианте магнитопровод может быть собранным из нескольких элементов. Соединение элементов может осуществляться любыми известными из уровня техники способами, включая механические (например, резьбовое соединение), термическими (например, сварка или пайка), химическим (например, приклеивание) и любыми другими.
Вал является продолговатым элементом, преимущественно имеющим цилиндрическую или кольцеобразную форму. Например, это может быть стержень, трубка, кольцо и т.п. Вал выполнен с использованием магнитопроводящего материала, например, ферромагнетика. В магнитном подшипнике в соответствии с настоящим изобретением используется поперечный магнитный поток, который замыкается через вал и проходит в нем по кругу вокруг оси вращения от одного полюса подшипника до другого.
В соответствии с фигурой, внутренний размер магнитопровода 1, например, его внутренний диаметр, больше внешнего размера, например внешнего диаметра, вала 4. Для того, чтобы магнитное поле, используемое для подвешивания вала, формировалось в непосредственной близости от вала, магнитопровод имеет магнитные полюса, которые начинаются от внутренней стенки магнитопровода 1 и заканчиваются около вала 4 на некотором расстоянии от него для того, чтобы вал мог свободно вращаться, не задевая магнитные полюса.
У магнитопровода 1 на фигуре предусмотрено четыре пары магнитных полюсов (всего восемь), направленных от магнитопровода 1 к месту нахождения вала 4. В некоторых других вариантах может быть и больше пар полюсов. Под полюсом понимается элемент подшипника, выполненный с использованием магнитопроводящего материала, например, ферромагнетика, и входящий в состав магнитопровода или присоединяемый к магнитопроводу. Полюс предназначен для того, чтобы принимать или выпускать магнитное поле в/из магнитпровода, обычно в концентрированной форме - то есть, линии магнитного поля при подходе к магнитному полюсу сближаются и их плотность увеличивается, а сила магнитного поля у магнитного полюса и в нем обычно существенно выше, чем в магнитопроповоде или вне магнитопровода и магнитного полюса. Магнитное поле обычно входит или выходит из магнитного полюса под прямым углом.
Под парой плюсов понимаются такие два полюса, которые расположены преимущественно друг напротив друга и вал располагается между ними. Для этого полюса, входящие в пару полюсов, могут быть расположены друг относительно друга под углом от 150° до 210°, то есть под углом 180°±30° относительно места нахождения оси вала. На фигуре ось вала находится в месте пересечения штрихпунктирных линий. Расположение полюсов может определятся по точкам, одинаковым для полюсов - например, расположенным в их плоскостях симметрии, или центральным точкам или угловым точкам. В предпочтительном варианте противоположные полюса, входящие в пару полюсов, могут быть расположены друг относительно друга под углом от 165° до 195°, то есть под углом 180°±15° относительно места нахождения оси вала, или точнее, под углом от 175° до 185°, то есть под углом 180°±5° относительно места нахождения оси вала, или точно под углом 180° относительно места нахождения оси вала.
В некоторых вариантах осуществления изобретения магнитные полюса, входящие в пары полюсов, могут располагаться под углами за пределами указанных (т.е. больше или меньше, чем указаны выше). При этом достижение технического результата настоящего изобретения по-прежнему возможно, однако для устойчивого удержания вала и надежной компенсации его отклонений могут потребоваться дополнительные расчеты и подбор компоновки магнитопровода, магнитных полюсов, постоянных магнитов и токовых катушек, а формирование компенсирующих токов для токовых катушек может потребовать дополнительных обрабатывающих цепей или усложненных алгоритмов/программ.
Пары магнитных полюсов, расположенные друг напротив друга, имеют разную структуру и функции в зависимости от взаимного расположения. В частности, соседние пары магнитных полюсов отличаются друг от друга как по структуре, так и по функции, а пары магнитных полюсов, расположенные через один соседний полюс, имеют одинаковую структуру и могут иметь как одинаковые, так и отличающиеся функции. Рассмотрим на примерах.
В частности, на фигуре магнитопровод 1 имеет две пары (т.е. всего четыре) составных полюсов, которые включают в себя постоянные магниты 2 и которые охвачены токовыми катушками 3, и две пары (т.е. всего четыре) простых полюсов. Простые полюса расположены между составными полюсами при обходе магнитопровода по его контуру (другими словами, вдоль внутренней линии сечения магнитопровода с переходами от одного полюса к другому) или, что аналогично, вокруг вала - на фигуре это будет по часовой стрелке или против часовой стрелки.
Составные полюса с постоянными магнитами и токовыми катушками выполняют одинаковую функцию подвешивания вращающегося вала и отличающиеся функции компенсации отклонений вала: горизонтально расположенная пара полюсов компенсирует с помощью токовых катушек отклонение вала налево или направо, а вертикально расположенная пара полюсов компенсирует с помощью своих токовых катушек отклонение вала вверх или вниз.
Простые полюса подшипника, показанного на фигуре, не обладающие ни постоянным магнитами, ни токовыми катушками, являются замыкающими полюсами - через них магнитный поток, исходящий из составных полюсов и проходящий в валу вдоль его контура (в плоскости, перпендикулярной к его оси), заходит обратно в магнитопровод, в результате чего магнитный контур замыкается.
В магнитном подшипнике также возможно другое расположение постоянных магнитов и токовых катушек: постоянные магниты могут располагаться на/в одних парах полюсов, а токовые катушки на других парах полюсов. Тогда пары полюсов с постоянными магнитами будут чередоваться с парами полюсов с токовыми катушками при обходе магнитопровода вокруг вала или по контуру магнитопровода. В таком варианте каждый полюс будет иметь либо постоянные магниты, и тогда его функцией будет подвешивание вала, либо токовую катушку, и тогда его функцией будет компенсация отклонений вала.
Полюса по меньшей мере двух пар полюсов, то есть соседние полюса при обходе магнитопровода по его контуру или по контуру вала, предпочтительно расположены друг относительно друга под углом от 60° до 120°, то есть под углом 90°±30° относительно места нахождения оси вала. В предпочтительном варианте соседние полюса расположены друг относительно друга под углом от 75° до 105°, то есть под углом 90°±15° относительно места нахождения оси вала, или точнее, под углом от 85° до 95°, то есть под углом 90°±5° относительно места нахождения оси вала, или точно под углом 90° относительно места нахождения оси вала.
В некоторых вариантах осуществления изобретения соседние магнитные полюса (при обходе магнитопровода по его контуру или по контуру вала), могут располагаться под углами за пределами указанных (т.е. больше или меньше, чем указаны выше). При этом достижение технического результата настоящего изобретения по-прежнему возможно, однако для устойчивого удержания вала и надежной компенсации его отклонений могут потребоваться дополнительные расчеты и подбор компоновки магнитопровода, магнитных полюсов, постоянных магнитов и токовых катушек, а формирование компенсирующих токов для токовых катушек может потребовать дополнительных обрабатывающих цепей или усложненных алгоритмов/программ.
Постоянные магниты, используемые в полюсах для подвеса вала, могут являться одинарными (в виде кубов, призм, цилиндров и т.п.) или составными, как показано на фигуре. Это значит, что те полюса магнитопровода, которые должны иметь постоянные магниты, могут быть снабжены по одному или несколько постоянных магнитов. В частности, как видно из фигуры, магнитный подшипник может содержать две или более пары постоянных V-образных магнитов. Постоянные магниты могут быть изготовлены с использованием любых магнитных материалов, известных из уровня техники, в том числе неодимовые магниты и т.п.
Сборный магнитный полюс подшипника, показанного на фигуре, содержит среднюю клиновидную часть и клиновидные выступы, а между выступами и средней частью размещены постоянные магниты 2. Постоянные магниты 2 вместе с клиновидными выступами и средней частью формируют составной магнитный полюс магнитопровода, отходящий от кольцеобразной (или цилиндрической) части 1 магнитопровода к валу 4. Постоянные магниты 2 в каждом полюсе установлены по намагниченности встречно с обеих сторон средней части полюса под углом от 1° до 45° к среднему полюсу (соответственно, от 2° до 90° относительно друг друга) и формируют, тем самым, V-образный магнит. Такое взаимное расположение постоянных магнитов 2 с клиновидными выступами и средней клиновидной части обеспечивает максимальную концентрацию магнитного потока, генерируемого постоянными магнитами 2, в полюсах магнитопровода и, как следствие, в зазоре между полюсами и валом 4. Это позволяет увеличить эффективность (удельную силу) магнита, то есть создать более высокий уровень магнитного поля в воздушном зазоре при меньших размерах и весе по сравнению с прототипом.
Постоянные магниты 2 предпочтительно имеют одинаковые размеры, одинаково отклонены от средней части полюса, т.е. создают преимущественно одинаковые магнитные поля. Однако векторы намагниченностей у этих магнитов ориентированы встречно, что отражено в том, что постоянные магниты на фигуре имеют разные оттенки цвета.
Величина магнитного момента  постоянных магнитов (произведение удельной намагниченности на объем магнита) определяет усилие, создаваемое магнитом, при желаемой величине воздушного зазора. В общем случае вектор магнитного момента есть сумма трех компонент
постоянных магнитов (произведение удельной намагниченности на объем магнита) определяет усилие, создаваемое магнитом, при желаемой величине воздушного зазора. В общем случае вектор магнитного момента есть сумма трех компонент  , где ось X направлена в направлении оси вала (перпендикулярно к плоскости фигуры), ось Y - по касательной к поверхности вала около составного полюса и ось Z - в направлении от полюса к валу. Компонента в направлении движения
, где ось X направлена в направлении оси вала (перпендикулярно к плоскости фигуры), ось Y - по касательной к поверхности вала около составного полюса и ось Z - в направлении от полюса к валу. Компонента в направлении движения  в предпочтительном варианте отсутствует. Встречная установка постоянных магнитов 2 означает, что касательные к поверхности вала около составного полюса компоненты их векторов магнитного момента противоположно направлены.
в предпочтительном варианте отсутствует. Встречная установка постоянных магнитов 2 означает, что касательные к поверхности вала около составного полюса компоненты их векторов магнитного момента противоположно направлены.
Благодаря тому, что магниты 2 находятся в наклонном (не параллельном и не перпендикулярном) положении друг относительно друга, их концы, расположенные ближе к кольцевой части 1 магнитопровода, сходятся, а концы, расположенные ближе к валу 4, отклонены от средней клиновидной части полюса (т.е. от направления от полюса к валу, показанному на фигуре штрихпунктиром) на углы от 1° до 45°.
Средняя клиновидная часть полюса, размещенная между магнитами 2, имеет форму, по крайней мере, частично, треугольной призмы. Та часть средней части, которая обращена к валу, преимущественно является вогнутой и повторяет форму вала, напротив которого она находится, с обеспечением достаточного зазора между средней частью полюса и валом. Такое взаимное расположение постоянных магнитов и других элементов составного полюса обеспечивает эффективный сбор магнитного потока от постоянных магнитов в средней клиновидной части полюса и, как следствие, - в воздушном зазоре с валом, что позволяет повысить эффективность (удельную силу) магнитов, то есть создать более сильное магнитное поле в воздушном зазоре при уменьшенных размерах и весе магнитов и магнитного подшипника в целом.
Магнитопровод предпочтительно является симметричным относительно средней клиновидной части полюса. Для обеспечения механической целостности конструкции магнитопровода, его клиновидные выступы могут быть соединены перемычкой из того же материала, что и магнитопровод в целом, как это показано на фигуре, формирую тем самым единую кольцеобразную или цилиндрическую конструкцию магнитопровода 1. Для устранения рассеяния магнитного потока, генерируемого постоянными магнитами 2 на перемычке магнитопровода около их сходящихся концов, и обеспечения максимальной концентрации магнитного потока в средней части полюса, между сходящимися концами постоянных магнитов 2 и перемычкой магнитопровода, соединяющей клиновидные выступы, предусмотрена полость, заполненная немагнитным материалом или воздухом.
Постоянные магниты, помимо указанных вариантов, могут иметь и другие способы расположения относительно полюсов магнитопровода. В частности, постоянные магниты могут располагаться в полюсах, как это показано на фигуре, и/или около полюсов магнитопровода. Например, постоянные магниты могут прилегать к магнитному полюсу, находясь около него, или частично вдаваться в него, в результате чего постоянные магниты оказывается как около полюса, так и в нем.
При этом важно обеспечивать концентрацию магнитного поля, создаваемого постоянными магнитами, в тех полюсах, около которых и/или в которых они расположены, поскольку полюса с постоянными магнитами и без постоянных магнитов чередуются при обходе магнитопровода по контуру его поперечного сечения или при огибании вала, расположенного в подшипнике, вокруг его цилиндрической или кольцеобразной поверхности (т.е. по внешнему периметру поперечного сечения вала).
Часть полюсов магнитопровода имеет токовые катушки. Токовые катушки также могут называться электромагнитными катушками, магнитными катушками или другими принятыми в уровне техники терминами. Они представляют собой обмотки, выполненные с использованием изолированного провода в виде множества витков, по которым пропускают электрический ток с целью формирования около катушек и внутри них магнитного поля, которое может менять силу и направление в зависимости от силы и направления электрического тока, протекающего через токовую катушку.
На фигуре в сечении показаны токовые катушки. В частях катушек, расположенных с одной стороны полюса, ток протекает по направлению в плоскость фигуры, а в других частях катушек, после огибания полюса выходящих с других сторон полюсов, ток протекает по направлению из плоскости фигуры.
В показанном на фигуре варианте токовые катушки расположены на магнитных полюсах магнитопровода, то есть охватывают магнитные полюса. Таким образом, токовые катушки расположены около полюсов. При этом расположение катушек около полюсов не обязательно предполагает их охват, поскольку катушки могут прилегать к полюсам при условии создания магнитного поля, которое концентрируется в магнитном полюсе, что может быть достигнуто известными из уровня техники способами.
При этом важно обеспечивать концентрацию магнитного поля, создаваемого токовыми катушками, в тех полюсах, около которых они расположены, поскольку полюса с токовыми катушками и без них чередуются при обходе магнитопровода по контуру его поперечного сечения или при огибании вала, расположенного в подшипнике, вокруг его цилиндрической или кольцеобразной поверхности (т.е. по внешнему периметру поперечного сечения вала).
Как уже отмечалось, магнитные полюса, снабженные постоянными магнитами, должны отделяться друг от друга при обходе по контуру магнитопровода магнитными полюсами без постоянных магнитов. Кроме того, магнитные полюса, снабженные токовыми катушками, должны отделяться друг от друга при обходе по контуру магнитопровода магнитными полюсами без токовых катушек. Необходимо отметить, что такая конфигурация магнитных полюсов может обеспечиваться независимо для постоянных магнитов и токовых катушек.
В частности, если как для токовых катушек, так и постоянных магнитов происходит чередование магнитных полюсов с ними и без (т.е. нет находящихся рядом магнитных полюсов, одновременно имеющих постоянные магниты или наоборот, одновременно не имеющих постоянных магнитов, а также нет находящихся рядом магнитных полюсов, одновременно снабженных токовыми катушками или наоборот, одновременно не имеющих катушек), то возможно два варианта размещения постоянных магнитов и токовых катушек относительно друг друга.
Во-первых, постоянные магниты и токовые катушки могут располагаться на одних и тех же полюсах, тогда полюса между ними являются свободными от постоянных магнитов и токовых катушек. Во-вторых, постоянные магниты и токовые катушки могут располагаться поочередно на соседних полюсах, и тогда у магнитопровода будут чередоваться полюса с постоянными магнитами и полюса с токовыми катушками.
На фигуре показан вариант, когда постоянные магниты и токовые катушки расположены на одних и тех же полюсах. Поскольку на фигуре полюса, в которых размещены постоянные V-образные магниты, и на которых размещены токовые катушки, являются одними и теми же полюсами, то между этими полюсами по контуру магнитопровода расположены полюса, у которых нет ни постоянных магнитов, ни токовых катушек.
Магнитопровод в рассматриваемой конфигурации объединяет магнитные потоки, создаваемых постоянными магнитами и токовыми катушками, и концентрирует их в зазорах между полюсами магнитопровода и валом. При этом объединение магнитных потоков имеет векторный характер - потоки могут складываться или вычитаться в зависимости от знака тока в катушке.
Объединение постоянных магнитов с токовой катушкой может называться гибридным магнитом. В некоторых случаях это может упростить изготовление конструкции магнитопровода, когда отдельно изготавливается магнитные полюса с такими гибридными электромагнитами, которые затем прикрепляются к магнитопроводу. Изготовление такого подшипника упрощается потому, что прикрепление постоянных магнитов и токовых катушек к полюсам происходит вне магнитопровода на открытом и свободном для манипуляций пространстве, а в ограниченном пространстве внутри магнитопровода магнитного подшипника производится только операция прикрепления собранного полюса к магнитопроводу, которая может осуществляться с помощью известных из уровня техники и частично описанных ранее способов крепления.
Замыкающие полюса подшипника, показанного на фигуре, не обладают ни постоянным магнитами, ни токовыми катушками и замыкают магнитный контур. Магнитный поток, исходящий из гибридных полюсов и проходящий в валу вдоль его контура в плоскости, поперечной его оси, заходит обратно в магнитопровод и далее замыкается в гибридный полюс обратно. Изготовление таких замыкающих полюсов, свободных от любых магнитов, также довольно просто - это может быть фрезеровка или литье в цельном виде с остальными частями магнитопровода или прикрепление простых по форме полюсов известными из уровня техники способами.
Конфигурация гибридного магнита, показанного на фигуре и состоящего из клиновидных выступов, средней клиновидной части полюса, постоянных магнитов 2 и токовой катушки 3, обеспечивает более эффективное направление магнитного потока в зазоре, и, как следствие, увеличение силы удержания вала при общем снижении веса по сравнению с прототипами.
Благодаря лучшему потокосцеплению средней клиновидной части полюса с валом сила взаимодействия подшипника с валом будет выше, чем в прототипе, при том же объеме постоянных магнитов и той же суммарной площади взаимодействующих поверхностей.
Постоянные магниты в противоположных полюсах обеспечивают подвешивание вала в магнитном подшипнике. Токовые катушки на полюсах обеспечивают возможность корректирования расположения вала внутри магнитного подшипника. Для этого на токовые катушки могут подаваться соответствующие токи, вызывающие возникновение в соответствующих полюсах магнитного поля, притягивающего или отталкивающего от этих полюсов вал. Для упрощения конструкции магнитного подшипника и/или элементов, управляющих токами, подаваемыми на токовые катушки, пары токовых катушек (т.е. противолежащих токовых катушек) обеспечивают пропускание через них однонаправленных токов.
Однонаправленные токи - это такие токи, которые имеют одинаковое пространственное направление, то есть параллельны (примерно или точно) и направлены в одну сторону. Когда катушки намотаны на полюса и охватывают их, однонаправленные токи в таких катушках будут огибать полюса одинаково, по часовой или против часовой стрелки, если смотреть на плоскости витков катушек так, что обе катушки, входящие в пару, были бы видны с одной точки, без разворота наблюдателя.
При протекании через катушки, принадлежащие одной паре, однонаправленных токов в них формируется однонаправленное магнитное поле. Например, для вертикальной пары токовых катушек (оранжевых) в соответствии с показанным направлением тока и правилом буравчика магнитное поле будет направлено вниз как у верхней, так и у нижней катушки. Однако, ввиду того что токовые катушки одной пары расположены напротив друг друга с разных сторон вала, вал находится между ними и испытывает разное действие от однонаправленных магнитных полей этих катушек.
В частности, магнитное поле от верхней катушки, направленное вниз, будет притягивать вал, потому что вал находится снизу от этой катушки, а магнитное поле от нижней катушки, направленное также вниз, будет отталкивать вал, потому что вал находится сверху от этой катушки. Благодаря этому положение вала корректируется вверх.
Таким образом, при однонаправленных токах, протекающих в токовых катушках одной пары, расположенной с двух сторон от вала, их магнитные поля оказывают на вал одинаковое с точки зрения вала воздействие и корректируют положение вала в сторону одной или второй катушки этой пары в зависимости от направления протекания тока. Для изменения направления корректировки положения вала достаточно поменять направление тока.
На фигуре видно, что магнитный подшипник содержит две пары токовых катушек - вертикальную и горизонтальную пары. Эти пары катушек предназначены для формирования корректирующих воздействий на вал с целью обеспечения нахождения вала в заданном положении в центре магнитного подшипника в том случае, если вал будет отклоняться от этого положения вследствие вращения или воздействий извне. Вертикальная пара катушек может регулировать положение вала по вертикали (относительно фигуры), а горизонтальная пара катушек может регулировать положение вала по горизонтали в соответствии с вышеописанным методом благодаря однонаправленным токам в катушках, относящихся к одной паре.
Когда токовые катушки относятся к одной паре, они расположены с разных сторон вала, а вал, соответственно, между ними. Поскольку для обеспечения компенсации отклонений вала в любых направлениях в плоскости, перпендикулярной оси вала, в магнитном подшипнике в соответствии с настоящим изобретением должно быть две или более пар катушек, они располагаются так, что при обходе по контуру магнитопровода или вокруг вала катушки не только отделены друг от друга полюсами без токовых катушек, но и катушки одной пары отделены друг от друга катушками другой пары - то есть, при обходе по контуру магнитопровода или вокруг вала катушки разных пар чередуются. В частности, на фигуре видно, что катушки желтого цвета, входящие в горизонтальную пару, отделены друг от друга при обходе подшипника по кругу катушками оранжевого цвета, входящими в вертикальную пару.
Однонаправленность токов в парах токовых катушек можно получить несколькими способами. В предпочтительном варианте, токовые катушки, входящие в одну пару и отделенные друг от друга по контуру магнитопровода токовыми катушками другой пары, могут быть электрически соединены параллельным образом. Это значит, что выводы токовых катушек одной пары, по которым втекает электрической ток, соединяются между собой, также как между собой соединены и выводы этих же токовых катушек, по которым электрической ток вытекает.
Такое параллельное электрическое соединение может быть выполнено непосредственно, например, пайкой или скруткой, или катушки, входящие в одну пару, могут быть намотаны одним непрерывным изолированным проводом с соответствующим переходом между полюсами так, чтобы обеспечить однонаправленность протекающих в них токов и формируемых ими магнитных полей.
Кроме того, параллельное электрическое соединение может быть выполнено с использованием дополнительных пассивных и/или активных цепей, в том числе и корректирующих ток, протекающий через одну или обе токовые катушки. Цепи могут включать в себя элементы и/или модули, осуществляющие аналоговое и/или цифровое преобразование тока. Элементы могут быть сопротивлениями, емкостями, индуктивностями, полупроводниковыми и другими элементами. Модули могут быть различными схемами или микросхемами, в том числе осуществляющими обработку в цифровом виде по заданным алгоритмам и программам.
В другом варианте однонаправленность токов в парах токовых катушек можно обеспечить выводами катушек, установленными так, чтобы получать одинаковые токи. Это может быть обеспечено, например, разъемами или таким взаимным расположением выводов, с которыми возможен только один способ подключения к ним и подачи однонаправленных токов. Благодаря таким выводам на катушки возможно подавать токи, несколько отличающиеся по форме и/или величине, что позволит более точно регулировать положение вала в подшипнике.
Кроме того, токовые катушки могут быть соединены с выводами с помощью цепей, корректирующих ток, протекающий через токовую катушку. Корректировка токов может быть выполнена с использованием дополнительных пассивных и/или активных цепей, в том числе и корректирующих ток, протекающий через одну или обе токовые катушки. Цепи могут включать в себя элементы и/или модули, осуществляющие аналоговое и/или цифровое преобразование тока. Элементы могут быть сопротивлениями, емкостями, индуктивностями, полупроводниковыми и другими элементами. Модули могут быть различными схемами или микросхемами, в том числе осуществляющими обработку в цифровом виде по заданным алгоритмам и программам.
Магнитный подшипник может содержать один, два или более датчиков отклонения вала от заданного положения. Эти датчики также могут называться датчиками положения вала. Датчики являются преимущественно бесконтактными и могут быть оптическими, индуктивными, емкостными, датчиками Холла и т.п. Два датчика позволяют однозначно определить положение вала и/или его отклонение от заданного положения в подшипнике и по этим данным скорректировать положение вала путем подачи корректирующих токов в токовые катушки подшипника так, как это описано выше.
Датчики могут крепиться к подшипнику любыми известными из уровня техники способами, в т.ч. перечисленными выше. Датчики могут устанавливаться внутри подшипника, например, на магнитопроводе между полюсами или на постоянных магнитах или токовых катушках. Датчики также могут быть размещены на подшипнике снаружи, так как вал выходит из подшипника наружу для того, чтобы на нем был размещен тот объект, который должен вращаться. Поскольку подшипник сам по себе крепится к какому-либо основанию, то датчики могут крепиться на основании или других объектах около подшипника или на отдалении от него.
Само по себе местоположение датчиков не имеет принципиального значения и влияет только на точность измерений. В связи с этим наличие в подшипнике датчиков отклонения вала от заданного положения не является обязательным, поскольку они могут быть установлены вне подшипника.
Датчики отклонения вала от заданного положения могут измерять отклонение в различных направлениях. В предпочтительном варианте датчики определяют отклонения вала в сторону токовых катушек, входящих в разные пары токовых катушек. Это позволит корректировать отклонения вала наиболее простым способом, поскольку измеренное отклонение в сторону какой-либо катушки можно откорректировать с помощью тока, поданного в эту и парную с ней катушку, и это корректирующее воздействие будет осуществляться на той же линии, на которой измерено отклонение.
В тех вариантах, когда датчики определяют отклонения вала в направлениях, отличающихся от положений токовых катушек, корректирующие токи, подаваемые в токовые катушки, требуют дополнительной обработки ввиду того, что скорректировать такое отклонение можно только подачей соответствующих токов в две или более пар токовых катушек. Это можно сделать с помощью распределительных цепей, содержащих пассивные и/или активные цепи, в том числе и корректирующие ток, протекающий через одну или обе токовые катушки. Цепи могут включать в себя элементы и/или модули, осуществляющие аналоговое и/или цифровое преобразование тока. Элементы могут быть сопротивлениями, емкостями, индуктивностями, полупроводниковыми и другими элементами. Модули могут быть различными схемами или микросхемами, в том числе осуществляющими обработку в цифровом виде по заданным алгоритмам и программам.
Магнитный подшипник в некоторых вариантах может дополнительно содержать цепь корректировки положения вала. Такая цепь получает сигналы от датчиков отклонения вала от заданного положения, которые могут располагаться в/на подшипнике или в другом месте. По полученным сигналам цепь корректировки положения вала формирует токи, которые подаются на одну, две или более пар токовых катушек, отделенных друг от друга по контуру магнитопровода токовыми катушками другой пары и выполненных с возможностью пропускания однонаправленных токов.
В результате получается замкнутая цепь обратной связи, в которой датчики определяют отклонение вала от заданного положения, цепь корректировки формирует корректирующие токи, а токовые катушки, на которые подаются сформированные корректирующие токи, воздействуют магнитным полем на вал и возвращают его в заданное положение. Затем цикл измерения, формирования токов и воздействия на вал непрерывно повторяется.
Поскольку для однозначного определения положения вала необходимо не менее двух датчиков отклонения вала от заданного положения, а для корректировки произвольного отклонения вала необходимы не менее двух пар токовых катушек в соответствии с настоящим изобретением, для формирования не менее двух корректирующих токов на основе показаний не менее двух датчиков необходимы не менее, чем две цепи корректировки положения вала или такая цепь корректировки положения вала, которая может формировать не один ток, а несколько.
Величина корректирующего усилия может определяться расчетным образом или экспериментально, и может регулироваться или адаптивно меняться в ходе эксплуатации. Цепь корректировки положения вала может быть цифровой и/или аналоговой, содержать усилители, аттенюаторы, линейные и/или нелинейные элементы, пассивные и/или активные цепи, в том числе и корректирующие ток, протекающий через одну или обе токовые катушки. Цепи могут включать в себя элементы и/или модули, осуществляющие аналоговое и/или цифровое преобразование тока. Элементы могут быть сопротивлениями, емкостями, индуктивностями, полупроводниковыми и другими элементами. Модули могут быть различными схемами или микросхемами, в том числе осуществляющими обработку в цифровом виде по заданным алгоритмам и программам.
Цепь корректировки положения вала предпочтительно размещается вне магнитного подшипника, но в некоторых случаях может прикрепляться к подшипнику или даже внутри него. Для настоящего изобретения цепь корректировки положения вала и датчик отклонения вала от заданного положения не являются принципиально значимыми, поскольку они всегда могут быть обеспечены в дополнение к подшипнику. Для магнитного подшипника обязательным является обеспечение подвеса вала и возможность воздействия на его положение, что обеспечивается постоянными магнитами и токовыми катушками. Датчики отклонения вала от заданного положения (или один датчик) и цепь корректировки положения вала в некоторых случаях могут входить в состав подшипника, но не являются обязательными для достижения технического результата настоящего изобретения.
Для формирования магнитного поля в токовых катушках необходим один или несколько источников электрического питания, который может быть один для всех цепей - измерительных, обрабатывающих, силовых и т.п. - или их может быть несколько, вплоть до отдельного источника питания для каждой цепи и/или токовой катушки. Источники электрического питания предпочтительно являются внешними для магнитного подшипника и не в объем охраны настоящего изобретения, поскольку электрическое питание может обеспечиваться самыми разными способами в дополнение к настоящему изобретению.
Благодаря настоящему изобретению удается повысить жесткость подшипника при минимуме энергозатрат. Жесткость подшипника представляет собой способность удерживать вал в заданном положении в подшипнике при наличии отклоняющих воздействий на него и ее повышение достигается за счет того, что в состав подшипника введены токовые катушки, позволяющие активно компенсировать и уменьшать отклонения вала от заданного положения при любых механических воздействиях на вал.
Подобное активное подавление отклонений требует значительных энергозатрат, но их в настоящем изобретении удалось снизить до минимума благодаря применению постоянных магнитов и такому их расположению и расположению токовых катушек, которое обеспечивает практически нулевое энергопотребление при отсутствии механических воздействий на вал.
Предложенная конструкция также упрощает управление токовыми катушками подшипника, необходимое для активной компенсации отклонений вала от заданного положения, что упрощает конструкцию и снижает требования к цепям (элементам, устройствам) управления токовыми катушками подшипника. Такое упрощение достигается за счет того, что токовые катушки располагаются парами, компенсирующие токи на которые подаются однонаправленно (синфазно).
Также обеспечивается высокая линейность зависимости силы воздействия токовыми катушками на вал как от величины смещения вала, так и амплитуды тока в катушках. Выбором соответствующего алгоритма управления током катушек можно обеспечить подвешивание вала при практически нулевом энергопотреблении.
Все указанные в описании технические результаты, в том числе дополнительные, достигаются с помощью магнитного подшипника в соответствии с настоящим изобретением одновременно и неразрывно друг от друга. Представленный на сопровождающей фигуре вариант осуществления, а также детально описанные дополнительные варианты осуществления предназначены для упрощения понимания сущности изобретения и не должны толковаться как ограничивающие объем охраны изобретения, определяемый последующей формулой изобретения. Описанные варианты могут объединяться и комбинироваться в любых сочетаниях, обеспечивающих реализацию принципа действия и достижение заявленных технических результатов. В результате комбинации отдельных вариантов могут достигаться дополнительные технические результаты.
| название | год | авторы | номер документа |
|---|---|---|---|
| ГИБРИДНЫЙ МАГНИТ БЕЗ ПОЛЕЙ РАССЕЯНИЯ ДЛЯ СИСТЕМЫ МАГЛЕВ | 2020 |
|
RU2743753C1 |
| ГИБРИДНЫЙ ЭЛЕКТРОМАГНИТ ДЛЯ СИСТЕМЫ МАГЛЕВ | 2020 |
|
RU2739939C1 |
| Прецезионное отклоняющее устройство | 1982 |
|
SU1048447A1 |
| ГИБРИДНЫЙ ЭЛЕКТРОМАГНИТ ДЛЯ СИСТЕМЫ МАГЛЕВ | 2020 |
|
RU2786679C2 |
| МАГНИТОЭЛЕКТРИЧЕСКАЯ МАШИНА | 2003 |
|
RU2256277C2 |
| УЛУЧШЕННЫЙ ГЕНЕРАТОР НА ПОСТОЯННОМ МАГНИТЕ | 2019 |
|
RU2716815C1 |
| Энергонезависимый датчик углового положения вала | 2023 |
|
RU2807016C1 |
| СПОСОБ ВИХРЕТОКОВОГО КОНТРОЛЯ ПРОТЯЖЁННЫХ ЭЛЕКТРОПРОВОДЯЩИХ ОБЪЕКТОВ И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2017 |
|
RU2651618C1 |
| МОТОР-КОЛЕСО | 2017 |
|
RU2653725C1 |
| Энергонезависимый датчик углового положения вала | 2024 |
|
RU2828613C1 |

Изобретение относится к области машиностроения, в частности к магнитным подшипникам. Магнитный подшипник включает магнитопровод, четыре пары магнитных полюсов, две пары постоянных магнитов, две пары токовых катушек. Магнитопровод выполнен с возможностью охвата вала. Магнитные полюсы направлены от магнитопровода к месту нахождения вала. Постоянные магниты размещены в двух парах магнитных полюсов, отделенных друг от друга по контуру магнитопровода магнитными полюсами без постоянных магнитов. Две пары токовых катушек размещены около двух пар магнитных полюсов, отделенных друг от друга по контуру магнитопровода магнитными полюсами без токовых катушек. Одна пара токовых катушек, отделенная друг от друга по контуру магнитопровода токовыми катушками другой пары, выполнена с возможностью пропускания однонаправленных токов. Достигается повышение жесткости подшипника. 14 з.п. ф-лы, 1 ил.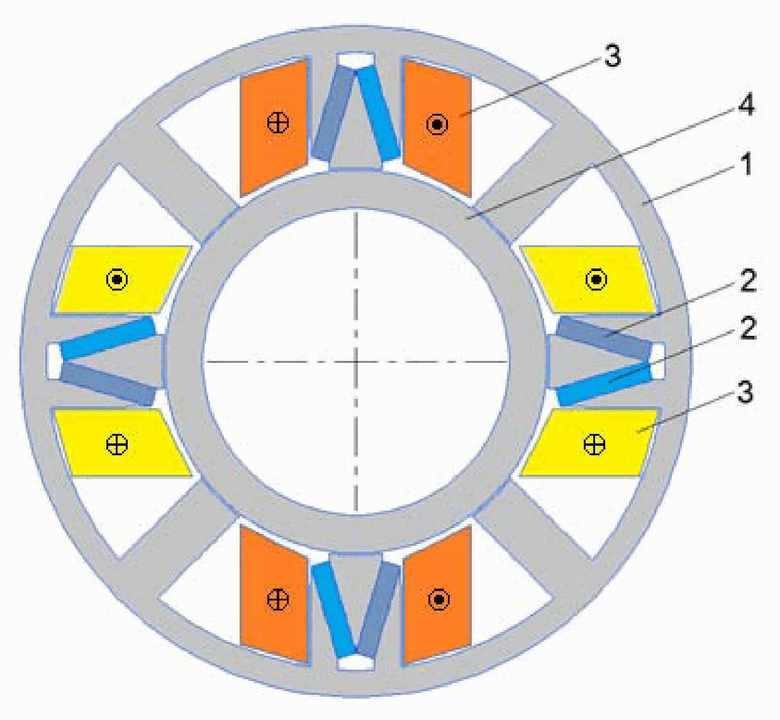
1. Магнитный подшипник, включающий в себя:
магнитопровод, выполненный с возможностью охвата вала;
по меньшей мере, четыре пары магнитных полюсов, направленных от магнитопровода к месту нахождения вала;
по меньшей мере, две пары постоянных магнитов, размещенных в/около двух парах магнитных полюсов, отделенных друг от друга по контуру магнитопровода магнитными полюсами без постоянных магнитов;
по меньшей мере, две пары токовых катушек, размещенных около двух пар магнитных полюсов, отделенных друг от друга по контуру магнитопровода магнитными полюсами без токовых катушек;
причем, по меньшей мере, одна пара токовых катушек, отделенных друг от друга по контуру магнитопровода токовыми катушками другой пары, выполнена с возможностью пропускания однонаправленных токов.
2. Магнитный подшипник по п. 1, отличающийся тем, что магнитопровод является кольцеобразным или цилиндрическим и/или собранным из нескольких элементов.
3. Магнитный подшипник по п. 1, отличающийся тем, что магнитопровод снабжен восемью полюсами.
4. Магнитный подшипник по п. 1, отличающийся тем, что полюса по меньшей мере одной пары полюсов расположены друг относительно друга под углом от 150° до 210° или от 165° до 195° или от 175° до 185° или 180° относительно места нахождения оси вала.
5. Магнитный подшипник по п. 1, отличающийся тем, что полюса по меньшей мере двух пар полюсов расположены друг относительно друга под углом от 60° до 120° или от 75° до 105° или от 85° до 95° или 90° относительно места нахождения оси вала.
6. Магнитный подшипник по п. 1, отличающийся тем, что по меньшей мере, одна пара токовых катушек размещена около пары магнитных полюсов, в/около которых размещены постоянные магниты.
7. Магнитный подшипник по п. 1, отличающийся тем, что по меньшей мере, одна пара токовых катушек размещена около пары магнитных полюсов, являющихся соседними для магнитных полюсов, в/около которых размещены постоянные магниты.
8. Магнитный подшипник по п. 1, отличающийся тем, что постоянные магниты являются V-образными.
9. Магнитный подшипник по п. 1, отличающийся тем, что по меньшей мере одна пара токовых катушек, отделенных друг от друга по контуру магнитопровода токовыми катушками другой пары, имеют параллельное электрическое соединение.
10. Магнитный подшипник по п. 9, отличающийся тем, что параллельное электрическое соединение выполнено с использованием цепей, корректирующих ток, протекающий через одну или обе токовые катушки.
11. Магнитный подшипник по п. 1, отличающийся тем, что по меньшей мере одна пара токовых катушек, отделенных друг от друга по контуру магнитопровода токовыми катушками другой пары, снабжена выводами, установленными с возможностью получения однонаправленных токов.
12. Магнитный подшипник по п. 11, отличающийся тем, что по меньшей мере одна токовая катушка соединена с выводами с помощью цепей, корректирующих ток, протекающий через токовую катушку.
13. Магнитный подшипник по п. 1, отличающийся тем, что дополнительно содержит, по меньшей мере, один датчик отклонения вала от заданного положения.
14. Магнитный подшипник по п. 13, отличающийся тем, что, по меньшей мере, один датчик установлен с возможностью определения отклонения вала в сторону токовой катушки, входящей в пару токовых катушек, отделенных друг от друга по контуру магнитопровода токовыми катушками другой пары и выполненных с возможностью пропускания однонаправленных токов.
15. Магнитный подшипник по п. 1, отличающийся тем, что дополнительно содержит цепь корректировки положения вала, выполненную с возможностью получения сигнала, по меньшей мере, от одного датчика отклонения вала от заданного положения и формирования токов, подаваемых, по меньшей мере, на одну пару токовых катушек, отделенных друг от друга по контуру магнитопровода токовыми катушками другой пары и выполненных с возможностью пропускания однонаправленных токов.
| Способ частотного телеизмерения | 1958 |
|
SU124339A1 |
| US 5321329 A1, 14.06.1994 | |||
| 0 |
|
SU199168A1 | |

