Область техники, к которой относится изобретение
[0001] Настоящее изобретение относится к системе беспроводной связи и, в частности, к способу и аппаратуре для получения синхронизации для связи типа Устройство-Устройство (D2D) за пределами участка покрытия в системе беспроводной связи.
Предпосылки создания изобретения
[0002] Система связи 3GPP LTE (долгосрочное развитие проекта партнерства 3-го поколения далее сокращенно LTE) схематично объясняется как пример системы беспроводной связи, к которой применимо настоящее изобретение.
[0003] Фиг. 1 является принципиальной схемой структуры сети E-UMTS как одного примера системы беспроводной связи. E-UMTS (развитая универсальная система мобильной связи) является системой развитой из обычной UMTS (универсальной системы мобильной связи). В настоящее время, основные работы по стандартизации применительно к E-UMTS ведутся 3GPP. В целом, E-UMTS именуется системой LTE. Подробное содержимое для технических описаний UMTS и E-UMTS относится к версии 7 и версии 8 документа «3rd generation partnership project; technical specification group radio access network», соответственно.
[0004] Обращаясь к Фиг. 1, E-UMTS включает в себя оборудование пользователя (UE), eNode B (eNB), и шлюз доступа (далее сокращенно AG), соединенный с внешней сетью таким образом, чтобы находиться на конце сети (E-UTRAN). eNode B может быть выполнен с возможностью передачи нескольких потоков данных применительно к широковещательной услуге, многоадресной услуге и/или одноадресной услуге.
[0005] Один eNode B содержит, по меньшей мере, одну соту. Сота предоставляет услугу передачи нисходящей линии связи и услугу передачи восходящей линии связи множеству оборудований пользователя путем установки на одну из 1.25 МГц, 2.5 МГц, 5 МГц, 10 МГц, 15 МГц, и 20 МГц полос пропускания. Разные соты могут быть сконфигурированы для предоставления соответствующих полос пропускания, соответственно. eNode B управляет передачами/приемами данных к/от оборудованиям пользователя. Применительно к данным нисходящей линии связи (далее сокращенно DL), eNode B информирует соответствующее оборудование пользователя о временном/частотном участке, по которому передаются данные, кодировании, размере данных, информации, которая относится к HARQ (гибридный автоматический повтор и запрос), и подобном посредством передачи информации DL планирования. А, применительно к данным восходящей линии связи (далее сокращенно UL), eNode B информирует соответствующее оборудование пользователя о временном/частотном участке, который может быть использован соответствующим оборудованием пользователя, кодировании, размере данных, информации, которая относится к HARQ, и подобном посредством передачи информации UL планирования соответствующему оборудованию пользователя. Между eNodeB могут использоваться интерфейсы для передачи трафика пользователя или управления передачей трафика. Базовая сеть (CN) состоит из AG (шлюза доступа) и сетевого узла для регистрации пользователя оборудования пользователя и подобного. AG управляет мобильностью оборудования пользователя посредством единицы TA (зоны отслеживания), состоящей из множества сот.
[0006] Технологии беспроводной связи были разработаны вплоть до LTE, основанной на WCDMA. Несмотря на это, последовательно растут постоянные потребности и ожидания пользователей и поставщиков услуг. Более того, поскольку непрерывно разрабатываются разные виды технологий радиодоступа, требуется, чтобы новая технологическая эволюция обладала будущей конкурентоспособностью. Для обеспечения будущей конкурентоспособности требуется сокращение затрат на бит, рост доступности услуги, гибкое использование полосы частот, простоя структура/открытый интерфейс и умеренное энергопотребление оборудования пользователя и подобное.
Раскрытие
Техническая задача
[0007] Цель настоящего изобретения состоит в предоставлении способ а и аппаратуры для получения синхронизации для связи типа Устройство-Устройство (D2D) за пределами участка покрытия системы беспроводной связи.
Техническое решение
[0008] Цели настоящего изобретения могут быть достигнуты посредством предоставления способа для осуществления непосредственной связи типа Устройство-Устройство (D2D) посредством первого оборудования пользователя (UE) из числа множества UE, расположенных за пределами покрытия базовой станции (BS) в системе беспроводной связи, включающего в себя этапы, на которых: делят конкретную единицу времени для непосредственной связи типа D2D на множество вероятных отрезков; обнаруживают опорный сигнал (RS), принятый от второго UE из числа множества UE, в одном отрезке отличном от последнего отрезка из числа вероятных отрезков; получают синхронизацию для непосредственной связи типа D2D со вторым UE, на основе опорного сигнала (RS); и передают предварительно заданный сигнал подтверждения в последнем отрезке из числа вероятных отрезков или в следующей единице времени конкретной единицы времени.
[0009] Способ может дополнительно включать в себя этап, на котором: принимают информацию конфигурации, сконфигурированную для осуществления непосредственной связи между вторым UE и оборудованием пользователя (UE), при этом информация конфигурации содержится в опорном сигнале (RS) или принимается в течение предварительно определенного времени, расположенного после конкретной единицы времени, посредством ресурса, в котором обнаруживается опорный сигнал (RS).
[0010] Способ может дополнительно включать в себя этап, на котором: по истечению предварительно определенного времени после получения синхронизации, обнаруживают опорный сигнал (RS) в одном отрезке, отличном от последнего отрезка, из числа вероятных отрезков, и таким образом повторно получают синхронизацию.
[0011] В соответствии с другим аспектом настоящего изобретения, устройство оборудования пользователя (UE) для осуществления непосредственной связи типа Устройство-Устройство (D2D) в системе беспроводной связи включает в себя: радиочастотный (RF) модуль, выполненный с возможностью передачи/приема сигнала к/от базовой станции (BS) или устройств оборудования пользователя (UE) противной стороны непосредственной связи типа D2D; процессор, выполненный с возможностью обработки сигнала, при этом процессор управляет RF модулем таким образом, что он делит конкретную единицу времени для непосредственной связи типа D2D на множество вероятных отрезков, обнаруживает опорный сигнал (RS) принятый от конкретного устройства UE из числа устройств UE противной стороны в одном отрезке отличном от последнего отрезка из числа вероятных отрезков, получает синхронизацию для непосредственной связи типа D2D с конкретным устройством UE на основе опорного сигнала (RS), и передает предварительно заданный сигнал подтверждения в последнем отрезке из числа вероятных отрезков или в следующей единице времени конкретной единицы времени.
[0012] RF модуль может принимать информацию конфигурации, сконфигурированную для осуществления непосредственной связи между вторым UE и оборудованием пользователя (UE), при этом информация конфигурации содержится в опорном сигнале (RS) или принимается в течение предварительно определенного времени, расположенного после конкретной единицы времени, посредством ресурса, в котором обнаруживается опорный сигнал (RS).
[0013] По истечению предварительно определенного времени после получения синхронизации, процессор может обнаруживать опорный сигнал (RS) в одном отрезке, отличном от последнего отрезка, из числа вероятных отрезков, и таким образом повторно получать синхронизацию.
[0014] Позиция частотного ресурса, требуемого для приема опорного сигнала (RS), или сигнатура обнаруженного опорного сигнала (RS) может быть определена на основании индекса вероятного отрезка для обнаружения опорного сигнала (RS). Предварительно заданный сигнал подтверждения может быть идентичен обнаруженному опорному сигналу (RS). Если обнаруженный опорный сигнал (RS) является сигналом распространения опорного сигнала (RS), который передается либо от другого UE ко второму UE, либо от базовой станции (BS) ко второму UE, обнаруженный опорный сигнал (RS) может включать в себя идентификатор (ID) для указания того, что опорный сигнал (RS) является сигналом распространения.
Преимущественные эффекты
[0015] В соответствии с примерными вариантами осуществления настоящего изобретения, способ и аппаратура для получения синхронизации могут более эффективно получать синхронизацию для связи типа Устройство-Устройство (D2D) за пределами участка покрытия в системе беспроводной связи.
[0016] Специалистам в соответствующей области следует иметь в виду, что эффекты, которые могут быть достигнуты посредством настоящего изобретения, не ограничиваются тем, что было конкретно описано здесь выше и прочие преимущества настоящего изобретения станут более четко понятны из следующего подробного описания.
Описание чертежей
[0017] Фиг. 1 является схемой, показывающей сетевую структуру Развитой Универсальной Системы Мобильной Связи (E-UMTS) как примера системы беспроводной связи.
[0018] Фиг. 2 является схемой, показывающей плоскость управления и плоскость пользователя архитектуры протокола радиоинтерфейса между Оборудованием Пользователя (UE) и Развитой Универсальной Наземной Сетью Радиодоступа (E-UTRAN), основанной на стандарте сети радиодоступа Проекта Партнерства 3-его Поколения (3GPP).
[0019] Фиг. 3 является схемой, показывающей физические каналы, используемые в системе 3GPP, и общий способ передачи сигнала, их использующий.
[0020] Фиг. 4 является схемой, показывающей структуру радиокадра нисходящей линии связи, используемого в системе Долгосрочного Развития (LTE).
[0021] Фиг. 5 является схемой, показывающей структуру субкадра восходящей линии связи в системе LTE.
[0022] Фиг. 6 является схемой, иллюстрирующей концепцию связи типа устройство-устройство (D2D).
[0023] Фиг. 7 иллюстрирует классификацию субкадров для связи типа D2D и связи с eNB.
[0024] Фиг. 8 иллюстрирует способ для передачи опорного сигнала (RS) субкадра в соответствии с первым вариантом осуществления настоящего изобретения.
[0025] Фиг. 9 иллюстрирует возможные позиции передачи опорного сигнала (RS) субкадра с точки зрения одного UE в соответствии с первым вариантом осуществления настоящего изобретения.
[0026] Фиг. 10 иллюстрирует прием опорного сигнала (RS) субкадра и передачу сигнала подтверждения в соответствии с первым вариантом осуществления настоящего изобретения.
[0027] Фиг. 11 является концептуальной схемой, иллюстрирующей примерный случай приема множества наложенных опорных сигналов (RS) субкадра в соответствии с первым вариантом осуществления настоящего изобретения.
[0028] Фиг. 12 является концептуальной схемой, иллюстрирующей, что граница субкадра нисходящей линии связи и граница субкадра восходящей линии связи меняются в соответствии с третьим вариантом осуществления настоящего изобретения.
[0029] Фиг. 13 является концептуальной схемой, иллюстрирующей способ для определения времени передачи (Tx) опорного сигнала (RS) субкадра, используя границу субкадра нисходящей линии связи, в соответствии с третьим вариантом осуществления настоящего изобретения.
[0030] Фиг. 14 является концептуальной схемой, иллюстрирующей другой способ для определения времени передачи (Tx) опорного сигнала (RS) субкадра, используя границу субкадра нисходящей линии связи, в соответствии с третьим вариантом осуществления настоящего изобретения.
[0031] Фиг. 15 является концептуальной схемой, иллюстрирующей способ для определения времени передачи (Tx) опорного сигнала (RS) субкадра, используя границу субкадра восходящей линии связи в соответствии с третьим вариантом осуществления настоящего изобретения.
[0032] Фиг. 16 является концептуальной схемой, иллюстрирующей способ для определения времени передачи (Tx) опорного сигнала (RS) субкадра во время между границей субкадра восходящей линии связи и границей субкадра нисходящей линии связи в соответствии с третьим вариантом осуществления настоящего изобретения.
[0033] Фиг. 17 является концептуальной схемой, иллюстрирующей способ для распространения информации границы субкадра, используемого в eNB, для UE, расположенных за пределами участка покрытия в соответствии с четвертым вариантом осуществления настоящего изобретения.
[0034] Фиг. 18 является структурной схемой аппаратуры связи в соответствии с вариантом осуществления настоящего изобретения.
Предпочтительный вариант осуществления
[0035] В нижеследующем описании, композиции настоящего изобретения, эффекты и другие характеристики настоящего изобретения могут быть легко поняты посредством вариантов осуществления настоящего изобретения, объяснение которых приводится со ссылкой на сопроводительные чертежи. Объясняемые в нижеследующем описании варианты осуществления являются примерами технологических признаков настоящего изобретения, применяемого к системе 3GPP.
[0036] В данном техническом описании, объяснение вариантов осуществления настоящего изобретения приводится, используя систему LTE и систему LTE-A, которые являются лишь примерными. Варианты осуществления настоящего изобретения применимы к различным системам связи, соответствующим вышеупомянутому определению. В частности, несмотря на то, что варианты осуществления настоящего изобретения описываются в настоящем техническом описании на основании FDD, это является лишь примерным. Варианты осуществления настоящего изобретения могут быть легко модифицированы и применены к H-FDD или TDD.
[0037] Фиг. 2 является схемой для структур плоскостей управления и пользователя протокола радиоинтерфейса между основанным на стандарте сети радиодоступа 3GPP оборудованием пользователя и E-UTRAN. Плоскость управления означает путь, по которому передаются сообщения управления, используемые оборудованием пользователя (UE) и сетью для управления вызовом. Плоскость пользователя означает путь, по которому передаются данные, сгенерированные на слое приложения, такие как аудио данные, данные интернет пакета, и подобные.
[0038] Физический слой, который является 1-м слоем, предоставляет более высоким слоям услугу пересылки информации, используя физический канал. Физический слой соединен со слоем управления доступом к среде, который находится выше, через транспортный канал (канал между антенными портами). Данные перемещаются между слоем управления доступом к среде и физическим слоем по транспортному каналу. Данные перемещаются между физическим слоем передающей стороны и физическим слоем принимающей стороны по физическому каналу. Физический канал использует время и частоту в качестве радиоресурсов. В частности, физический уровень модулируется посредством схемы OFDMA (множественного доступа с ортогональным частотным разделением) в DL и физический слой модулируется посредством схемы SC-FDMA (множественного доступа с частотным разделением и одной несущей) в UL.
[0039] Слой управления доступом к среде (далее сокращенно MAC) 2-го слоя предоставляет услугу слою управления линией радиосвязи (далее сокращенно RLC), который является более высоким слоем, по логическому каналу. Слой RLC 2-го слоя обеспечивает надежную передачу данных. Функция слоя RLC может быть реализована посредством функционального блока в рамках MAC. Слой PDCP (протокол сходимости пакетных данных) 2-го слоя выполняет функцию сжатия заголовка для сокращения ненужной информации управления, тем самым эффективно передавая такие IP пакеты как IPv4 пакеты и IPv6 пакеты в узкой полосе радиоинтерфейса.
[0040] Слой управления радиоресурсами (далее сокращенно RRC), который находится в самом низком местоположении 3-го слоя, задан только в плоскости управления. Слой RRC отвечает за управление логическими каналами, транспортными каналами и физическими каналами в связи с конфигурацией, повторной конфигурацией и высвобождением радиопотоков (radio bearer) (далее сокращенно RB). RB указывает услугу, предоставляемую 2-м слоем, для доставки данных между оборудованием пользователя и сетью. С этой целью, слой RRC оборудования пользователя и слой RRC сети осуществляют друг с другом обмен сообщением RRC. В случае, когда существует соединение RRC (RRC-соединение) между оборудованием пользователя и RRC слоем сети, оборудование пользователя находится в состоянии RRC-соединения (режим соединения). В противном случае, оборудование пользователя находится в состоянии свободного RRC (свободный режим). Слой без доступа (NAS), который находится на вершине слоя RRC, выполняет функцию, такую как управление сеансом, управление мобильностью, и подобное.
[0041] Одна сота, состоящая из eNode B (eNB) устанавливается на одну из 1.25 МГц, 2.5 МГц, 5 МГц, 10 МГц, 15 МГц, и 20 МГц полос пропускания и затем предоставляет услугу передачи нисходящей линии связи или восходящей линии связи множеству оборудований пользователя. Разные соты могут быть сконфигурированы для предоставления соответствующих полос пропускания, соответственно.
[0042] DL транспортные каналы для передачи данных от сети к оборудованию пользователя включают в себя BCH (широковещательный канал) для передачи системной информации, PCH (канал поискового вызова) для передачи сообщения поискового вызова, SCH нисходящей линии связи (совместно используемый канал) для передачи трафика пользователя или сообщения управления и подобного. DL трафик многоадресной/широковещательной услуги или сообщение управления могут быть переданы по DL SCH или отдельному DL MCH (многоадресному каналу). Между тем, UL транспортные каналы для передачи данных от оборудования пользователя к сети включают в себя RACH (канал произвольного доступа) для передачи начального сообщения управления, SCH (совместно используемый канал) восходящей линии связи для передачи трафика пользователя или сообщения управления. Логический канал, который находится над транспортным каналом и отображен в транспортном канале, включает в себя BCCH (широковещательный канал), PCCH (канал управления поисковым вызовом), CCH (общий канал управления), MCCH (многоадресный канал управления), MTCH (многоадресный канал трафика) и подобное.
[0043] Фиг. 3 является схемой для объяснения физических каналов, используемых для системы 3GPP, и общий способ передачи сигнала, используя физические каналы.
[0044] Если включается питание оборудования пользователя или оборудование пользователя входит в новую соту, оборудование пользователя может выполнить задачу начального поиска соты для согласования синхронизации с eNode B и подобного [S301]. С этой целью, оборудование пользователя может принимать первичный канал синхронизации (P-SCH) и вторичный канал синхронизации (S-SCH) от eNode B, может быть синхронизировано с eNode B и затем может приобретать информацию, такую как ID соты и подобное. Впоследствии, оборудование пользователя может принимать физический широковещательный канал от eNode B и затем может иметь возможность приобретения межсетевой широковещательной информации. Между тем, оборудование пользователя может принимать опорный сигнал нисходящей линии связи (DL RS) на этапе начального поиска соты и затем может иметь возможность проверки состояния DL канала.
[0045] Завершив начальный поиск соты, оборудование пользователя может принимать физический совместно используемый канал управления нисходящей линии связи (PDSCH) в соответствии с физическим каналом управления нисходящей линии связи (PDCCH) и информацию, переносимую по физическому каналу управления нисходящей линии связи (PDCCH). Затем оборудование пользователя может иметь возможность приобретения подробной системной информации [S302].
[0046] Между тем, если оборудование пользователя изначально осуществляет доступ к eNode B или не имеет радиоресурса для передачи сигнала, оборудование пользователя может иметь возможность выполнения процедуры произвольного доступа для осуществления доступа к eNode B [S303 по S306]. С этой целью, оборудование пользователя может передавать конкретную последовательность в качестве преамбулы по физическому каналу произвольного доступа (PRACH) [S303/S305] и затем может иметь возможность приема сообщения ответа по PDCCH и соответствующего PDSCH в ответ на преамбулу [S304/S306]. В случае основанной на состязании процедуре произвольного доступа (RACH), может существовать возможность дополнительного выполнения процедуры разрешения состязания.
[0047] Выполнив вышеупомянутые процедуры, оборудование пользователя может иметь возможность осуществления приема PDCCH/PDSCH [S307] и передачи PUSCH/PUCCH (физический совместно используемый канал восходящей линии связи/физический канал управления восходящей линии связи) [S308] в качестве общей процедуры передачи сигнала восходящей/нисходящей линии связи. В частности, оборудование пользователя принимает DCI (информацию управления нисходящей линии связи) по PDCCH. В данном случае, DCI содержит такую информацию управления как информацию по выделению ресурса оборудованию пользователя. Формат DCI варьируется в соответствии с ее целью.
[0048] Между тем, информация управления, передаваемая к eNode B от оборудования пользователя через UL, или информация управления, принимаемая оборудованием пользователя от eNode B, включает в себя сигналы ACK/NACK нисходящей/восходящей линии связи, CQI (Указатель Качества Канала), PMI (Индекс Матрицы Предварительного Кодирования), RI (Указатель Ранга) и подобное. В случае системы 3GPP LTE, оборудование пользователя может иметь возможность передачи вышеупомянутой информации управления, такой как CQI/PMI/RI и подобной, по PUSCH и/или PUCCH.
[0049] Фиг. 4 иллюстрирует примерные каналы управления, включенные в участок управления субкадра в DL радиокадре.
[0050] Обращаясь к Фиг. 4, субкадр включает в себя 14 OFDM-символа. Первые от одного до трех OFDM-символов субкадра используются для участка управления, а другие от 13 до 11 OFDM-символов используются для участка данных в соответствии с конфигурацией субкадра. На Фиг. 5, ссылочные обозначения с R1 по R4 обозначают RS или пилот-сигналы для с антенны 0 по антенну 3. RS выделяются в предварительно определенном шаблоне в субкадре независимо от участка управления и участка данных. Канал управления выделяется по не-RS ресурсам в участке управления, а канал трафика также выделяется по не-RS ресурсам участка данных. Каналы управления, выделяемые на участке управления, включают в себя Физический Канал Указателя Формата Управления (PCFICH), Физический Канал Указателя Гибридного-ARQ (PHICH), Физический Канал Управления Нисходящей Линии Связи (PDCCH), и т.д.
[0051] PCFICH является физическим каналом указателя формата управления, переносящим информацию о количестве OFDM-символов, используемых для PDCCH в каждом субкадре. PCFICH располагается в первом OFDM-символе субкадра и сконфигурирован с приоритетом над PHICH и PDCCH. PCFICH включает в себя 4 Группы Элементов Ресурса (REG), каждая REG распределена на участке управления на основании Идентификатора (ID) соты. Одна REG включает в себя 4 Элемента Ресурса (RE). RE является минимальным физическим ресурсом, который задается одной поднесущей на один OFDM-символ. PCFICH устанавливается в с 1 по 3 или со 2 по 4 в соответствии с полосой пропускания. PCFICH модулируется в Квадратурной Фазовой Манипуляции (QPSK).
[0052] PHICH является физическим каналом указателя Гибридного Автоматического Повтора и запроса (HARQ) несущим HARQ ACK/NACK для UL передачи. Т.е., PHICH является каналом, который доставляет информацию DL ACK/NACK для UL HARQ. PHICH включает в себя одну REG и скремблируется для конкретной соты. ACK/NACK указывается в одном бите и модулируется в Двоичной Фазовой Манипуляции (BPSK). Модулированная ACK/NACK расширяется с Коэффициентом Расширения (SF) 2 или 4. Множество PHICH, отображенных в одних и тех же ресурсах, формируют группу PHICH. Количество PHICH, мультиплексированных в группе PHICH, определяется в соответствии с количеством кодов расширения. PHICH (группа) повторяется три раза для достижения выигрыша от разнесения в частотной области и/или временной области.
[0053] PDCCH является физическим каналом управления DL, выделяемым первым n OFDM-символам субкадра. Здесь, n является 1 или большим целым числом, указываемым PCFICH. PDCCH занимает один или более CCE. PDCCH переносит информацию выделения ресурса касательно транспортных каналов, PCH и DL-SCH, разрешения UL планирования, и информацию HARQ для каждого UE или группы UE. PCH и DL-SCH передаются по PDSCH. Вследствие этого, eNB и UE передают и принимают данные обычно по PDSCH, за исключением особой информации управления или особых служебных данных.
[0054] Информация, указывающая одному или более UE принять данные PDSCH, и информация, указывающая то, каким образом предполагается, что UE принимает и декодирует данные PDSCH, доставляется по PDCCH. Например, в предположении, что Контроль Циклическим Избыточным Кодом (CRC) конкретного PDCCH маскируется посредством Временного Идентификатора Сети Радиодоступа (RNTI) «A», и информация о данных, передаваемых в радиоресурсах (например, позиция частоты), «B» основанная на информации формата транспорта (например, размере транспортного блока, схеме модуляции, информации кодирования, и т.д.) «C», передаются в конкретном субкадре, UE в соте отслеживает, т.е. декодирует вслепую PDCCH, используя информацию RNTI в пространстве поиска. Если одно или более UE имеют RNTI «A», эти UE принимают PDCCH и принимают PDSCH, указанный посредством «B» и «C» на основании информации принятого PDCCH.
[0055] Базовой единицей ресурса DL канала управления является REG. REG включает в себя четыре смежных RE за исключением RE несущего RS. PCFICH и PHICH включают в себя 4 REG и 3 REG, соответственно. PDCCH сконфигурирован в единицах Элемента Канала Управления (CCE), причем каждый CCE включающий в себя 9 REG.
[0056] Фиг. 5 иллюстрирует структуру UL субкадра в системе LTE.
[0057] Обращаясь к Фиг. 5, UL субкадр может быть доставлен в участке управления и участке данных. Физический Канал Управления Восходящей Линии Связи (PUCCH), включающий в себя Информацию Управления Восходящей линии Связи (UCI), выделяется на участке управления, Физический Совместно Используемый Канал Восходящей Линии Связи (PUSCH), включающий в себя данные пользователя, выделяется на участке данных. Средняя часть субкадра выделяется для PUSCH, тогда как обе стороны участка данных в частотной области выделяются для PUCCH. Информация управления, передаваемая по PUCCH, может включать в себя HARQ ACK/NACK, CQI, представляющий собой состояние канала нисходящей линии связи, RI для MIMO, Запрос Планирования (SR), запрашивающий выделение UL ресурсов. PUCCH для одного UE занимает один RB в каждом слоте субкадра. То есть, два RB выделенные для PUCCH, являются со скачкообразным изменением частоты в границе слота субкадра. В частности, PUCCH с m=0, m=1, m=2, и m=3 выделяются для субкадра на Фиг. 5.
[0058] Фиг. 6 является схемой, иллюстрирующей концепцию связи типа устройство-устройство (D2D).
[0059] Обращаясь к Фиг. 6, UE1 и UE2 могут осуществлять непосредственную связь типа D2D между ними, и UE3 и UE4 также могут осуществлять непосредственную связь типа D2D между ними. eNB может управлять позицией временных/частотных ресурсов, мощностью Tx, и т.д. для непосредственной связи типа UE-UE посредством соответствующего сигнала управления. Тем не менее, если UE располагаются за пределами покрытия eNB, непосредственная связь типа UE-UE может быть достигнута без использования сигнала управления eNB. Для удобства описания, непосредственная связь типа UE-UE далее будет именоваться связью типа D2D (Устройство-Устройство).
[0060] UE, расположенное в покрытии eNB, должно осуществлять связь с eNB одновременно с осуществлением связи типа D2D. Одним способом для этой цели является классификация всех субкадров на субкадры для связи с eNB и субкадры для связи типа D2D. Фиг. 7 иллюстрирует классификацию субкадров для связи типа D2D и связи с eNB.
[0061] Обращаясь к Фиг. 7, UE, выполненное с возможностью осуществления связи типа D2D, используя полосу восходящей линии связи системы FDD, передает сигнал восходящей линии связи к eNB в первом субкадре, показанном на Фиг. 7, передает сигнал D2D другому UE во втором субкадре, и принимает сигнал D2D от другого UE в третьем субкадре. Посредством вышеупомянутой операции, может быть решена проблема взаимных помех между связью типа D2D и связью с eNB, и связь типа D2D имеет структуры Tx/Rx на основе субкадра и может быть легко мультиплексирована со связью с eNB во временной области.
[0062] В данном случае, если связь типа D2D имеет структуру Tx/Rx на основе субкадра, это означает, что временная область, занимаемая сигналом Tx D2D, является временной областью, занимаемой одним субкадром, и базовая единица времени, в которой UE передает или принимает сигнал D2D, используется как один субкадр. Излишне говорить, что при необходимости может быть осуществлено сцепление нескольких субкадров в базовых единицах времени.
[0063] Между тем, ситуация, при которой связь типа D2D имеет основанную на субкадре структуру, может быть эффективно использована даже когда UE, расположенное за пределами покрытия eNB, осуществляет связь типа D2D. Например, даже когда конкретное UE располагается за пределами покрытия eNB, основанная на субкадре структура обладает преимуществом, состоящим в том, что UE, работающее в качестве целевого объекта связи типа D2D, может осуществлять связь с eNB, используя некоторые субкадры, содержащиеся в покрытии eNB. В дополнение, даже когда все UE D2D располагаются за пределами покрытия eNB, основанная на субкадре структура обладает преимуществом, поскольку связь осуществляется таким образом, что разные линии связи D2D занимают разные субкадры, когда несколько линий связи типа D2D являются смежными друг с другом, как показано на Фиг. 6, в результате чего избегают взаимных помех.
[0064] Для того чтобы осуществлять связь типа D2D на основе субкадра, позиция границы в которой начинается субкадр должна точно распознаваться UE, участвующими в связи типа D2D. В качестве основного способа для распознавания границы субкадра, передается опорный сигнал (далее именуемый опорным сигналом субкадра) с уникальными атрибутами, указывающими границу субкадра, и UE, приняв опорный сигнал, могут извлечь границу субкадра из соответствующей позиции опорного сигнала (RS) субкадра. Например, конкретная позиция отстоящая от времени приема (Rx) RS субкадра на предварительно определенное расстояние может быть определена как граница субкадра.
[0065] Если UE D2D располагается в покрытии eNB, eNB может передавать данный RS субкадра. В частности, RS субкадра, переданный от eNB, не передается отдельно для D2D, и RS субкадра может быть передан для конфигурирования позиции субкадра действующей связи типа eNB-UE. То есть, UE, расположенное в покрытии eNB, может принимать конкретный сигнал от eNB с тем, чтобы изначально осуществлять доступ к eNB. В случае системы LTE, предполагается, что UE, расположенное в покрытии eNB, может принимать первичный сигнал синхронизации (PSS) и/или вторичный сигнал синхронизации (SSS) и может распознавать границу субкадра, которым управляет eNB, используя PSS или SSS, так что граница субкадра может быть применена к связи типа D2D без изменения или может быть модифицирована в соответствии с предварительно определенным правилом и затем применена к связи типа D2D.
[0066] В противоположность, если UE D2D располагается за пределами покрытия eNB, невозможно осуществить вышеупомянутую операцию. Таким образом, UE должно непосредственно передавать RS субкадра таким образом, чтобы границы субкадра между UE D2D были идентичны друг другу.
[0067] Первый вариант осуществления
[0068] Далее будет подробно описан способ, позволяющий UE передавать RS субкадра.
[0069] Если UE передает RS субкадра, предпочтительно, что один RS субкадра передается среди смежных UE. Для этой цели, когда конкретное UE предпринимает попытку передачи RS субкадра, в изначально назначенный момент времени подтверждается наличие или отсутствие RS субкадра, переданного от другого UE. Первый вариант осуществления предлагает способ для передачи RS субкадра с предварительно определенной вероятностью только когда не присутствует RS субкадра, переданный от другого UE. То есть, несколько UE наблюдают за возможной позицией RS субкадра. Если каждое UE не обнаруживает какого-либо RS субкадра в предыдущей возможной позиции, UE предпринимает попытку передачи RS субкадра с предварительно определенной вероятностью в следующей возможной позиции.
[0070] Фиг. 8 иллюстрирует способ для передачи опорного сигнала (RS) субкадра в соответствии с первым вариантом осуществления настоящего изобретения.
[0071] Обращаясь к Фиг. 8, может быть распознано, что не передается RS субкадра в возможных позициях (1, 2, 3) для передачи RS субкадра, так как передача RS на всех UE не выполняется на этапе принятия решения о том, выполняется ли вероятностная передача. В возможной позиции 4, UE1 определяет передачу на этапе принятия решения вероятностной передачи/не передачи, так что UE может передать RS субкадра. В дополнение, UE, приняв RS субкадра от другого UE, могут рассматривать соответствующий RS в качестве только одного RS в течение, по меньшей мере, предварительно определенного времени, и предпочтительно, что дополнительные попытки передачи RS субкадра остановлены.
[0072] Вышеупомянутая операция, при которой только одно UE из числа нескольких UE, сконфигурированных для вероятностной передачи RS субкадра, может выполнять итоговую передачу, далее именуется как схема передачи RS субкадра, основанная на UE-UE конкуренции. Различные способы для реализации основанной на UE-UE конкуренции, схемы передачи RS субкадра могут включать в себя следующие первый и второй способы (1) и (2).
[0073] 1) В процессе принятия решения о том, осуществляется ли вероятностная передача, случайные числа генерируются в соответствии с предварительно определенным правилом в каждой возможной позиции Tx. Если каждое из случайного числа выше (или ниже) опорного значения, предопределенного заданной вероятностью передачи, UE могут осуществлять операцию по передаче опорного сигнал.
[0074] 2) В качестве альтернативы, случайные числа генерируются и сохраняются в соответствии с предварительно определенным правилом (которое присутствует между предварительно определенным минимальным значением и максимальным значением) в начальной возможной позиции. Если RS субкадра не передается в каждой возможной позиции, предварительно определенное значение вычитается из сохраненного значения и результат вычитания вновь сохраняется. Если сохраненное значение равно или меньше предварительно определенного опорного значения посредством повторения таких действий вычитания и сохранения, UE могут осуществлять операцию таким образом, что RS субкадра может быть передан.
[0075] Если RS субкадра передается в соответствии с вышеупомянутым правилом, все UE D2D, приняв RS субкадра, могут определить позицию границы субкадра на основании принятого RS субкадра. UE D2D, передав RS субкадра, предполагает, что RS субкадра, переданный от UE D2D, был переслан смежным UE, так что принимается решение о позиции границы субкадра. Подробный пример схемы передачи RS субкадра на основании UE-UE конкуренции, будет приведен ниже.
[0076] Фиг. 9 иллюстрирует возможные позиции для передачи опорного сигнала (RS) субкадра с точки зрения одного UE в соответствии с первым вариантом осуществления настоящего изобретения. В частности, Фиг. 9 иллюстрирует, что период времени, соответствующий одному субкадру, составлен из в сумме N возможных позиций, начиная от 0 до N-1.
[0077] Обращаясь к Фиг. 9, одна возможная позиция для передачи RS субкадра может включать в себя период передачи сигнатуры реального опорного сигнала (RS) и защитный период, сконфигурированный с тем, чтобы гарантировать конкретное время, требуемое для переключения на позицию Rx в следующей возможной позиции после завершения передачи. В данном случае, защитный период может быть опущен, если время переключения на операцию Rx ненужно.
[0078] В частности, позиция частоты опорного сигнала (RS), переданного в каждой возможной позиции посредством UE, и/или сигнатура могут быть определены посредством индекса возможной позиции. Например, сигнатура RS, переданного в возможной позиции (n), может быть задана для передачи в частотной области, которая соответствует соответствующей возможной позиции, и сигнатура, передаваемая в другой возможной позиции, и сигнатура RS, передаваемая в возможной позиции (n), могут занимать разные частотные области. В дополнение, сигнатуре RS, передаваемая в возможной позиции (n), может быть задано использование последовательности, отличной от тех, что у других возможных позиций. Например, индекс (n) возможной позиции может быть заключен в конкретном значении для инициализации последовательности сигнатуры. Конечно, информация, касающаяся предварительно определенного количества битов, добавляется в RS субкадра так, что может быть указана возможная позиция.
[0079] Посредством вышеупомянутой операции, UE, приняв сигнатуру конкретного RS субкадра, может позволить другому UE, передав соответствующую сигнатуру, распознать, какая возможная позиция ассоциирована с соответствующей сигнатурой с точки зрения UE, передавшего соответствующую сигнатуру, как впрочем и распознать то, какая возможная позиция является позицией передачи соответствующей сигнатуры. Вследствие этого, UE приема (Rx) может распознать границу субкадра с точки зрения соответствующего UE Tx на основе времени Rx соответствующей сигнатуры и индекса возможной позиции соответствующей сигнатуры.
[0080] Между тем, некоторые последние возможные позиции могут быть использованы для передачи сигнала подтверждения, указывающего на то, успешно ли передан RS субкадра. То есть, предполагая, что конкретное UE D2D успешно приняло RS субкадра во внутренней возможной позиции конкретного субкадра, сигнал подтверждения передается в последней возможной позиции с тем, чтобы проинформировать UE передачи об успешном приеме. Передача такого сигнала подтверждения может иметь эффект ретрансляции RS субкадра. В дополнение, сигнал подтверждения может не всегда передаваться в том же самом субкадре, что и RS субкадра, или может не всегда передаваться в последней возможной позиции. Сигнал подтверждения может быть передан в предварительно определенной возможной позиции или также может быть передан после успешной передачи RS субкадра.
[0081] Фиг. 10 иллюстрирует прием опорного сигнала (RS) субкадра и передачу сигнала подтверждения в соответствии с первым вариантом осуществления настоящего изобретения.
[0082] Обращаясь к Фиг. 10, при условии, что один субкадр составлен из в сумме 6 возможных позиций, UE может принимать RS субкадра в возможной позиции 2. По прошествии трех возможных позиций, UE может распознать появление новой границы субкадра. Вследствие этого, UE может передавать сигнал подтверждения в возможной позиции 5, указывающей последнюю возможную позицию соответствующего субкадра.
[0083] Сигнал подтверждения может быть идентичным по структуре RS субкадра. Чтобы отличать сигнал подтверждения, сигнал подтверждения может занимать частотную позицию и/или может быть отличным по сигнатуре в ассоциации с другими RS субкадра. UE (т.е. головное UE), передав RS субкадра в конкретном субкадре, может определять, что RS субкадра был успешно передан при условии, что обнаруживается сигнал подтверждения соответствующего субкадра, и таким образом связь типа D2D осуществляется в ответ на границу субкадра.
[0084] В частности, все или некоторые UE, приняв RS субкадра, могут одновременно передавать сигнал подтверждения. В данном случае, сигнал подтверждения может быть сконфигурирован в форме наложения нескольких сигналов передачи UE, так что сигнал передачи может быть передан с более высокой мощностью. Если конкретное UE не принимает RS субкадра в конкретном субкадре и принимает сигнал подтверждения для RS субкадра в конкретном субкадре, граница субкадра может быть установлена на основе сигнала подтверждения. Тем не менее, существует вероятность того, что конкретное UE из числа UE, принявших RS субкадра, принимает другие RS субкадра с более высокой мощностью. Это конкретное UE может не участвовать в одновременной передаче сигнала подтверждения. Вышеупомянутая ситуация может указывать на то, что UE может выбрать один из нескольких RS субкадра, будучи принятых посредством UE, и передать сигнал подтверждения, соответствующий выбранному RS субкадра. UE, передав RS субкадра, может предположить, что опорный сигнал (RS), будучи переданным от UE, был принят с доступной максимальной мощностью.
[0085] Конкретное UE может принимать множество RS субкадра, накрадывающихся друг на друга на интервалах с длительной разницей по времени в пределах конкретного субкадра, и подробное описание этого далее будет приведено со ссылкой на прилагаемые чертежи. Фиг. 11 является концептуальной схемой, иллюстрирующей примерный случай приема множества наложенных опорных сигналов (RS) субкадра в соответствии с первым вариантом осуществления настоящего изобретения.
[0086] В данном случае, UE может распознать возникновение сбоя приема RS субкадра (т.е. конфликт RS субкадра), так что UE может не передавать сигнал подтверждения. В качестве альтернативы, также может быть передан сигнал не-подтверждения, указывающий на возникновение конфликта между RS субкадра.
[0087] UE передачи RS субкадра, которые не приняли сигнал подтверждения или приняли сигнал не-подтверждения, могут предположить сбой получения границы субкадра в пределах соответствующего субкадра, и могут повторно осуществить основанную на конкуренции передачу RS субкадра в пределах следующего субкадра. При условии, что конкретное UE передает RS субкадра, не принимает сигнал подтверждения, соответствующий своему собственному сигналу Tx, и принимает сигнал подтверждения, соответствующий другому RS субкадра, граница субкадра может быть сформирована в ответ на принятый сигнал подтверждения.
[0088] Между тем, в соответствии с другим способом для передачи сигнала подтверждения, когда используется основанная на конкуренции схема передачи RS субкадра, если конкретное UE приняло RS субкадра действительный в возможной позиции (n), RS субкадра с точно такими же атрибутами, как те, что у соответствующего RS субкадра, могут быть переданы по всем последующим возможным позициям (т.е. возможным позициям n+1, n+2, и т.д.). Предполагая, что одно конкретное UE из числа множества конкурирующих UE из одной группы изначально передает RS субкадра, все оставшиеся UE, приняв RS субкадра, могут одновременно передать точно такой же RS субкадра в последующих возможных позициях, так что RS субкадра может быть распространен на более широкий участок.
[0089] Второй вариант осуществления
[0090] Между тем, вышеупомянутая схема передачи RS субкадра, основанная на UE-UE конкуренции, может быть эффективно использована, когда все UE располагаются за пределами покрытия eNB. Вследствие этого, основанная на конкуренции схема передачи RS субкадра может быть применена только к случаю, при котором UE располагается за пределами покрытия eNB. В случае, когда UE располагается в покрытии eNB, основанная на конкуренции схема передачи RS субкадра может быть применена только к случаю, при котором явно указывается использование основанной на UE-UE конкуренции схемы передачи RS субкадра.
[0091] Факт того, что UE располагается за пределами покрытия eNB, может указывать первый случай (a), при котором PSS/SSS, передаваемые от eNB, не обнаруживаются на конкретной несущей, или второй случай (b), при котором максимальное значение RSRP и/или RSRQ, измеренное на конкретной несущей, может быть равно или меньше конкретного опорного значения.
[0092] В данном случае, конкретной несущей является несущая, которая требуется для связи типа D2D. В частности, если связь типа D2D осуществляется по несущей нисходящей линии связи системы FDD, или если связь типа D2D осуществляется по несущей, соединенной с несущей, требуемой для связи типа D2D (т.е. если связь типа D2D осуществляется по несущей восходящей линии связи системы FDD), конкретной несущей может быть несущая нисходящей линии связи, образующая пару с несущей восходящей линии связи, по которой запланировано осуществление соответствующей связи типа D2D. В качестве альтернативы, если невозможно осуществить доступ к eNB посредством любой несущей, ссылка также может быть изменена на случай, при котором UE удовлетворяет вышеупомянутому условию по всем несущим, по которым возможен прием, так что основанная на UE-UE конкуренции схема передачи RS субкадра может быть ограничена.
[0093] Если некоторые UE располагаются в покрытии eNB, и если UE, сконфигурированное для осуществления связи типа D2D с соответствующим UE, устанавливает границу субкадра на основе произвольного времени за пределами покрытия eNB, становится сложным выполнить вышеупомянутые операции. Предпочтительно, граница субкадра для связи типа D2D соответствующего UE может быть идентичной той, что для связи с eNB. Настоящее изобретение может позволять UE, расположенному в покрытии eNB, иметь приоритет над другим UE, расположенным за пределами покрытия eNB, по отношению к передаче RS субкадра. Для назначения такого приоритета, могут быть использованы следующие способы (a) и (b).
[0094] a) Прежде всего, может существовать низкая вероятность того, что UE, расположенное за пределами покрытия eNB, передает RS субкадра, и может существовать высокая вероятность того, что UE, расположенное в покрытии eNB, передает RS субкадра. Способ (a) может быть реализован в соответствии со Способом (1) из числа основанных на конкуренции способов передачи RS субкадра. Более подробно, опорное значение, используемое UE, расположенным за пределами покрытия eNB, может быть отрегулировано таким образом, чтобы быть меньше, чем опорное значение, используемое другим UE, расположенным в покрытии eNB (когда RS субкадра передается, используя случайные числа, каждое из которых меньше опорного значения), или может быть отрегулировано, чтобы быть выше опорного значения, используемого другим UE, расположенным в покрытии eNB (когда RS субкадра передается, используя случайные числа, каждое из которых выше опорного значения), с тем чтобы мог быть реализован способ (a). Если способ (a) применяется к способу (2) из числа основанных на конкуренции способов передачи RS субкадра, максимальное случайное число, генерируемое от UE, расположенного за пределами покрытия eNB, регулируется, чтобы быть выше максимального случайного числа, генерируемого от другого UE, расположенного в покрытии eNB, с тем чтобы мог быть реализован способ (a).
[0095] b) В качестве альтернативы, UE, расположенное за пределами покрытия eNB, не передает RS субкадра в некоторых начальных возможных позициях Tx, так что соответствующая возможная позиция может быть использована для операции Tx UE, расположенного в покрытии eNB. Если способ (b) применяется к способу (a) из числа основанных на конкуренции способов передачи RS субкадра, способ (b) может быть реализован посредством установки значения 0 для вероятности Tx UE, расположенного за пределами покрытия eNB, в некоторых начальных возможных позициях. Если способ (b) применяется к способу (a) из числа основанных на конкуренции способов передачи RS, минимальное случайное число, генерируемое от UE, расположенного за пределами покрытия eNB, может быть отрегулировано, чтобы быть выше минимального случайного числа, генерируемого от UE, расположенного в покрытии eNB, с тем чтобы мог быть реализован способ (b). В дополнение, минимальное случайное число, генерируемое от UE, расположенного за пределами покрытия eNB, может быть отрегулировано, чтобы быть равным или выше минимального случайного числа, генерируемого от другого UE, расположенного в покрытии eNB, так что UE, расположенное за пределами покрытия eNB, может всегда осуществлять передачу после завершения операций UE, расположенным в покрытии eNB.
[0096] В дополнение, предполагая, что присутствует период действия, когда используется выбранный RS субкадра, UE могут повторно передавать RS субкадра на основе конкуренции, после того как истекает соответствующий период действия. В данном случае, время истечения периода действия может быть сразу установлено на начальное время времени передачи RS субкадра возможных позиций. В случае использования способа (1) из числа основанных на конкуренции способов передачи RS субкадра, если UE генерирует значение случайного числа и не передает RS в возможной позиции, UE может начать сокращать значение случайного числа, как только истекает период действия предыдущего RS. В случае использования способа (2) из числа основанных на конкуренции способов передачи RS субкадра, UE с низким приоритетом и расположенное за пределами покрытия eNB может не передавать RS субкадра в течение предварительно определенного времени, начинающегося со времени истечения времени действия RS субкадра, используемого в качестве действующей ссылки.
[0097] Третий вариант осуществления
[0098] Между тем, UE, расположенное в покрытии eNB, может получать границу субкадра на основе сигнала, переданного от eNB, как описано выше, но для UE, расположенного в покрытии eNB, существует потребность передачи RS таким образом, чтобы другое UE, расположенное за пределами покрытия eNB, могло приобрести точно такую же границу субкадра. Для этой цели, eNB может выдавать команду конкретному UE на передачу RS субкадра посредством сигнализации более высокого уровня, такой как сигнализация RRC.
[0099] Это указание передачи может быть классифицировано на прямое указание и косвенное указание. Прямое указания может явно указывать позицию временных/частотных ресурсов RS субкадра, информацию сигнатуры RS, мощность Tx, и т.д., которые планируются для передачи от соответствующего UE к конкретному UE. Косвенное указание может позволять eNB передавать RS субкадра либо конкретному UE, либо группе UE, составленной из некоторых UE, в соответствии с основанным на конкуренции способе передачи RS субкадра. Данное косвенное указание может включать в себя атрибуты RS субкадра, например, позицию временных/частотных ресурсов RS, информацию сигнатуры RS, мощность Tx, и т.д.
[0100] После того, как UE, расположенное в покрытии eNB, принимает указание передачи (Tx) eNB, UE может передавать RS субкадра в соответствии с принятым указанием Tx. На ресурсы нисходящей линии связи оказывает чрезмерные помехи высокая мощность Tx eNB, так что участок прибытия RS субкадра может быть чрезмерно ограниченным, и UL ресурсы могут быть использованы в качестве ресурсов передачи RS субкадра.
[0101] Начальная точка UL субкадра регулируется в соответствии с разными значениями временного опережения отдельных UE с тем, чтобы сместить задержку распространения между eNB и UE, и таким образом сигналы Tx нескольких UE могут пребывать на eNB в одинаковый момент времени. В результате, граница субкадра нисходящей линии связи UE, расположенного в покрытии eNB, отличается от границы субкадра восходящей линии связи UE, расположенного в покрытии eNB. Фиг. 12 является концептуальной схемой, иллюстрирующей то, что граница субкадра нисходящей линии связи и граница субкадра восходящей линии связи изменяются в соответствии с третьим вариантом осуществления настоящего изобретения.
[0102] В данном случае, UE, приняв сообщение указания передачи RS субкадра от eNB, должно определить, какая из границы DL субкадра и границы UL субкадра будет использована для передачи RS субкадра. Один из следующих способов принятия решения о времени передачи RS субкадра может быть использован при необходимости.
[0103] i) В качестве первого способа принятия решения о времени передачи (Tx) RS субкадра, время передачи RS субкадра может быть определено на основе границы DL субкадра.
[0104] Опорный сигнал (RS), передаваемый от UE, может быть передан в позиции границы DL субкадра, принятой UE, или может быть передан в конкретной позиции, сдвинутой от позиции границы DL субкадра на предварительно определенное время.
[0105] Фиг. 13 является концептуальной схемой, иллюстрирующей способ для определения времени передачи (Tx) опорного сигнала (RS) субкадра, используя границу субкадра нисходящей линии связи в соответствии с третьим вариантом осуществления настоящего изобретения. В частности, Фиг. 13 иллюстрирует, что RS субкадра имеет задержку по отношению к позиции границы DL субкадра на предварительно определенное время (т.е., смещение), и затем передается. На Фиг. 13, предполагается, что UE1, расположенное в покрытии, передает RS субкадра к UE2, расположенному за пределами покрытия. Конечно, RS субкадра также может быть передан в конкретное время раньше предварительно определенного времени (т.е. смещения) на основе границы DL субкадра не отступая от объема и сущности настоящего изобретения.
[0106] Вышеупомянутая схема обладает преимуществом, состоящим в том, что позиция границы DL субкадра UE (передав соответствующий RS субкадра), расположенного в покрытии, может быть распознана другими UE, расположенными за пределами покрытия. В частности, в случае использования системы TDD, когда сигнал, передаваемый от внешнего UE покрытия для связи типа D2D, может вызывать сильные помехи для внутреннего UE покрытия, когда внутреннее UE покрытия принимает DL сигнал. В данном случае, предполагая, что внешнее UE покрытия может распознать позицию границы DL субкадра внутреннего UE покрытия, прием сигнала нисходящей связи внутреннего UE соответствующего покрытия может быть более эффективно защищен, и подробное описание этого будет приведено далее со ссылкой на прилагаемые чертежи.
[0107] Фиг. 14 является концептуальной схемой, иллюстрирующей другой способ для определения времени передачи (Tx) опорного сигнала (RS) субкадра, используя границу субкадра нисходящей линии связи в соответствии с третьим вариантом осуществления настоящего изобретения.
[0108] Обращаясь к Фиг. 14, передача сигнала D2D исключается в предварительно определенный отрезок времени, извлеченный из позиции границы субкадра, принятой внешним UE покрытия, так что прием важных DL сигналов внешнего UE смежного покрытия может быть защищен. В качестве альтернативы, в течение соответствующего отрезка времени, мощность передачи D2D может быть уменьшена на предварительно определенное смещение, или максимальная мощность Tx может быть установлена на более низкую мощность, при этом прием DL сигнала внутреннего UE покрытия может быть защищен, однако может быть разрешена связь типа D2D со смежным UE, расположенным очень близко к внутреннему UE.
[0109] На Фиг. 14, UE1 может повторно регулировать субкадр #3 в ответ на границу DL субкадра, и может использовать субкадр #3 для передачи RS субкадра. UE2, расположенное за пределами покрытия, может получать значение оценки границы DL субкадра UE1, и может не применять отрезок времени, в отношении которого принято решение в соответствии с предварительно определенным правилом на основе соответствующего значения оценки для связи типа D2D, так что UE1 может легко принимать DL сигнал в субкадре #1 и субкадре #2. В данном случае, отрезок, не используемый для связи типа D2D, может появляться неоднократно.
[0110] В дополнение, если RS субкадра передается в ответ на границу DL субкадра, как описано выше, последующий сигнал Tx/Rx D2D также может быть передан и принят на основе границы DL субкадра. В частности, последующий сигнал Tx/Rx D2D также может быть применен к сигналу D2D, посредством которого данные могут быть переданы, используя большой объем ресурсов. Между тем, сигнал обнаружения D2D для распознавания, располагается ли UE в смежной позиции, также может иметь отличные границы субкадра.
[0111] ii) В качестве второго способа принятия решения о времени передачи (Tx) RS субкадра, время передачи RS субкадра может быть определено на основе границы UL субкадра.
[0112] RS, передаваемый UE, может быть передан на границе UL субкадра, на которой UE передает RS к eNB, или может быть передан в конкретной позиции, сдвинутой от границы UL субкадра на предварительно определенное время.
[0113] Фиг. 15 является концептуальной схемой, иллюстрирующей способ для определения времени передачи (Tx) опорного сигнала (RS) субкадра, используя границу субкадра восходящей линии связи в соответствии с третьим вариантом осуществления настоящего изобретения. На Фиг. 15, предполагается, что UE1, расположенное в покрытии, передает RS субкадра к UE2, расположенному за пределами покрытия.
[0114] Вышеупомянутая схема отличается тем, что внешнее UE покрытия может получать границу UL субкадра внутреннего UE покрытия, так что внутреннее UE покрытия может осуществлять связь типа D2D с внешним UE покрытия, и в то же время может легко осуществлять передачу сигнала к eNB в другом смежном UL субкадре. В частности, вышеупомянутое преимущество может считаться эффективным в системе FDD, в которой все субкадры конкретной частотной области установлены как UL субкадры. В данном случае, DL субкадры отделены от UL субкадров со связью типа D2D в частотной области, так что не требуется использовать защитный период для DL приема, показанного на Фиг. 14.
[0115] В дополнение, если RS субкадра передается в ответ на границу UL субкадра, последующий сигнал Tx/Rx D2D также может быть передан и принят на основе границы UL субкадра. В частности, последующий сигнал Tx/Rx D2D также может быть применен к сигналу D2D посредством которого данные могут быть переданы, используя большой объем ресурсов. Подобно, сигнал обнаружения D2D для распознавания, располагается ли UE в смежной позиции, также может иметь отличные границы субкадра.
[0116] iii) В качестве третьего способа принятия решения о времени передачи (Tx) RX субкадра, время передачи RS субкадра также может быть определено между границей UL субкадра и границей DL субкадра.
[0117] Например, время передачи RS субкадра может быть установлено в конкретное время раньше границы DL субкадра на предварительно определенное время, соответствующее половине текущего значения TA, или также может быть установлено в конкретное время, отстоящее от соответствующего времени на предварительно определенное время.
[0118] Фиг. 16 является концептуальной схемой, иллюстрирующей способ для определения времени передачи (Tx) опорного сигнала (RS) субкадра во время между границей субкадра восходящей линии связи и границей субкадра нисходящей линии связи в соответствии с третьим вариантом осуществления настоящего изобретения. В частности, как может быть видно из Фиг. 16, половина TA приблизительно идентична задержке распространения между eNB и UE, так что время раньше времени приема границы DL субкадра на предварительно определенное время, соответствующее половине TA, идентично времени передачи, при котором eNB передает границу DL субкадра, и также идентично времени приема, при котором eNB принимает границу UL субкадра.
[0119] Вследствие этого, конкретное время раньше времени приема границы DL субкадра на предварительно определенное время, соответствующее половине TA, приблизительно идентично во всех UE, принадлежащих к одной и той же соте. В результате, несмотря на то, что любое UE передает RS субкадра, RS субкадра передается в приблизительно сходные моменты времени, так что общая граница субкадра D2D остается неизменной даже когда несколько UE альтернативно передают RS субкадра.
[0120] Для того чтобы выбрать один способ из числа вышеупомянутых способов принятия решения о времени передачи RS субкадра, eNB может информировать UE конкретным сигналом, указывающим на то, какой способ принятия решения будет использован для передачи RS субкадра. В качестве альтернативы, соответствующие способы имеют преимущества в отношении разных способов дуплекса, так что соответствующий способ может быть выбран в соответствии с тем, какая схема дуплекса используется ресурсами, которые будут использованы для передачи RS субкадра. Например, система TDD может использовать способ (i) принятия решения о времени передачи RS субкадра, основанный на границе DL субкадра, а система FDD может использовать способ (ii) принятия решения о времени передачи RS субкадра, основанный на границе UL субкадра.
[0121] В качестве альтернативы, RS субкадра с разными атрибутами также могут быть переданы в ответ на множество RS субкадра. Например, в случае использования сигнала обнаружения, который одновременно передается/принимается несколькими UE в ответ на синхронизацию, все UE, участвующие в передаче, должны иметь общее время, UE может передавать RS в соответствии либо со способом (iii) для определения времени передачи RS субкадра между границей UL субкадра и границей DL субкадра, либо со способом (i) для определения времени передачи RS субкадра, когда присутствует незначительная разница в задержке распространения между UE, и может передавать и принимать сигнал обнаружения на основе результата передачи RS. В противоположность, при осуществлении обмена данными пользователя между отдельными UE, способ (ii) для определения времени передачи RS субкадра может быть использован в соответствии с ситуацией каждого UE.
[0122] В данном случае, для UE необходимо распознавать, какой из способов принятия решения о времени используется для передачи RS субкадра, с тем чтобы RS субкадра, передаваемые в соответствии с разными схемами (т.е. RS субкадра для синхронизации разных типов сигналов D2D) могли быть дифференцированы по сигнатуре Tx, позициям переданных временных/частотных областей, или подобному. Например, сигнатура конкретного RS субкадра может быть предварительно задана таким образом, что сигнатура может быть использована только для RS субкадра для сигнала обнаружения или может быть использована только для RS субкадра для связи типа D2D.
[0123] Четвертый вариант осуществления
[0124] Между тем, если UE, расположенное в покрытии (т.е. внутреннее UE покрытия), принимает сообщение указания передачи RS субкадра от eNB, операция UE (в частности, конфликт с UL передачей в направлении eNB) может возникнуть в соответствующих ресурсах.
[0125] В данном случае, передача RS субкадра может иметь приоритет. То есть, когда UE, сконфигурированное для передачи RS субкадра в конкретном субкадре, предпринимает попытку передачи сигнала к eNB в том же самом субкадре, сигнал, который должен быть передан к eNB, может быть отброшен, и затем может быть передан RS субкадра.
[0126] В качестве альтернативы, передача сигнала к eNB также может иметь приоритет. То есть, когда UE, сконфигурированное для передачи RS субкадра в конкретном субкадре, предпринимает попытку передачи сигнала к eNB в том же самом субкадре, что и конкретный субкадр, передача RS может быть отброшена, и затем может быть выполнена передача сигнала к eNB.
[0127] Вышеприведенные способы могут быть использованы разными образами в соответствии со способом для указания передачи RS субкадра или в соответствии с категориями сигналов, которые должны быть переданы к eNB. Например, предполагая, что сигнал, который должен быть передан к eNB, является любым из: полустатически передаваемым сигналом полупостоянного планирования (SPS), периодическим отчетом CSI, и сигналом запроса планирования, который должен быть независимо передан посредством UE, eNB может не прямо принимать решение о передаче в соответствующее время, с тем чтобы RS субкадра имел приоритет. В частности, вышеупомянутый случай может быть более эффективно использован для случая, при котором eNB прямо указывает RS субкадра.
[0128] В другом примере, предполагая, что сигнал, который должен быть передан к eNB, является PDSCH, который указывается сигналом физического слоя, таким как PDCCH или EPDCCH (Улучшенный PDCCH), HARQ-ACK, которая относится к основанному на SPS PDSCH, разрешением восходящей линии связи, или основанным на PHICH сигналом передачи PUSCH, сигнал передачи к eNB может иметь приоритет. По приему сообщения указания, которое выдает команду UE на передачу на конкуретной основе RS субкадра, т.е. по приему сообщения косвенного указания, указывающего на передачу RS субкадра, RS субкадра также может быть передан в другое время, так что передача сигнала к eNB может всегда иметь приоритет при необходимости.
[0129] Как описано выше, RS субкадра, передаваемой посредством сообщения прямого указания или сообщения косвенного указания eNB, может быть классифицирован на RS субкадра, автономно определяемый UE, без приема сообщения указания от eNB, и атрибуты сигнатуры. Например, выбирается подмножество из числа всех наборов сигнатуры, которая может быть использована в качестве сигнатуры RS субкадра, и сигнатура, которая соответствует соответствующему подмножеству, может быть задана для передачи посредством UE только когда присутствуют сообщения прямого/косвенного указания от eNB. Конечно, может быть использован дополнительный указатель, и может существовать возможность задания дополнительного указателя для организации отличия между RS, будучи переданным без использования сообщения указания от eNB, и субкадром, будучи переданным посредством сообщения указания от eNB. В результате, если конкретное UE принимает конкретный RS субкадра, может быть распознано, был ли RS передан посредством сообщения указания от eNB, т.е. может быть распознано, был ли RS передан посредством UE, расположенного в покрытии eNB. На основании вышеупомянутой информации, более высокий приоритет может быть успешно назначен передаче RS UE, расположенного в покрытии eNB.
[0130] В дополнение, когда создается сигнал подтверждения, раскрытый в первом варианте осуществления, все или некоторые из атрибутов RS субкадра, будучи принятого посредством UE, могут быть использованы повторно. В результате, если RS субкадра передается посредством сообщения указания от eNB, тот факт, что сигнал подтверждения был передан посредством сообщения указания от eNB может быть просигнализирован другим UE. Соответственно, UE D2D, которое приняло RS субкадра, переданный посредством сигнала подтверждения или сообщения указания eNB, может повторно передать соответствующий RS субкадра без использования дополнительной UE-UE конкуренции в конкретное время, или может повторно передать соответствующий RS субкадра одновременно при этом обладая приоритетом в конкуренции. Информация границы субкадра, используемая в eNB, может быть распространена на внешние UE покрытия.
[0131] Фиг. 17 является концептуальной схемой, иллюстрирующей способ для распространения информации границы субкадра, используемой в eNB, к UE, расположенным за пределами участка покрытия в соответствии с четвертым вариантом осуществления настоящего изобретения.
[0132] Обращаясь к Фиг. 17, eNB может выдать команду UE1 на передачу RS субкадра, и UE1 может передать RS субкадра в соответствии с сообщением указания eNB. UE2 может передать RS субкадра с наивысшим приоритетом из числа RS субкадра, принятого от UE1 и других RS субкадра, или может передать сигнал подтверждения в ответ на передачу RS субкадра с наивысшим приоритетом.
[0133] Посредством вышеупомянутого процесса распространения, несмотря на то, что UE3 непосредственно не осуществляет связь типа D2D с внутренним UE покрытия eNB, UE3 может быть синхронизировано с субкадром eNB, так что UE1, расположенное в покрытии, и UE2, сконфигурированное для осуществления связи типа D2D, могут быть полезными для операции D2D UE2.
[0134] В дополнение, когда первое внешнее UE покрытия осуществляет связь типа D2D в ответ на RS субкадра, переданный либо посредством первого внешнего UE, либо посредством второго внешнего UE покрытия, предпринимается попытка обнаружения RS субкадра, переданного внутренним UE покрытия. Если обнаруживается RS субкадра, первое внешнее UE может осуществлять операцию в ответ на RS субкадра, переданный посредством внутреннего UE покрытия. Например, UE внешнее к покрытию, обнаружив RS субкадра, переданный посредством внутреннего UE покрытия, может переконфигурировать момент времени субкадра в ответ на RS, переданный посредством UE внутреннего к покрытию, в пределах предварительно определенного времени. Если соответствующее UE передает RS субкадра, RS может быть передан в ответ на переконфигурированное время субкадра, или передача RS соответствующего UE может быть остановлена.
[0135] В дополнение, предполагая, что присутствует период действия в RS субкадра, который был передан UE внешним к покрытию, и используется в качестве ссылки на действующую связь типа D2D, синхронизация в RS субкадра, переданным посредством UE внешним к покрытию, сохраняется до тех пор, пока не истекает соответствующий период действия. Тем не менее, после истечения времени действия, требуется синхронизация с начальным временем RS субкадра, переданного посредством внутреннего UE покрытия. В качестве альтернативы, ожидается, что другой RS субкадра будет передан внутренним UE покрытия в пределах предварительно определенного времени, и не предпринимается попытка передачи RS субкадра в течение соответствующего предварительно определенного времени, таким образом, что приоритет может быть назначен внутреннему UE покрытия. В данном случае, UE внешнее к покрытию, которое не приняло RS субкадра в течение предварительно определенного времени, может предпринять попытку передачи RS субкадра в соответствии с вышеприведенными вероятностными способами.
[0136] Между тем, в соответствии со схемой передачи RS субкадра, основанной на конкуренции UE-UE, приоритет для передачи RS может быть по-разному назначен в соответствии с категориями UE D2D. Например, UE для связи типа D2D могут быть классифицированы на некоторые категории в соответствии различными видами информации, например, максимальной мощностью Tx сигнала D2D, информацией о том, возможна ли групповая связь (т.е. может ли одно UE D2D одновременно осуществлять связь типа D2D с множеством UE D2D), и информацией о том, может ли осуществляться управление другими линиями связи D2D. В частности, управление другой линией связи D2D может указывать управление выделением ресурсов, которое касается смежной линии связи D2D, в которой соответствующее UE не содержится. В данном случае, приоритет может быть по-разному назначен для передачи RS субкадра в соответствии с категориями UE D2D. Более высокий приоритет может быть назначен категориям UE с более высокой функцией. Например, более высокий приоритет может быть назначен UE с более высокой максимальной мощностью Tx, UE с возможностью групповой связи, или UE с функцией управления другой линией связи D2D, таким образом, что соответствующие UE могут устанавливать опорное значение для субкадра на более высокую вероятность и другие UE могут работать в ответ на установленное опорное значение.
[0137] В дополнение, несмотря на то, что UE получает границу субкадра в соответствии с вышеупомянутой схемой, новая граница субкадра должна быть определена в ответ на перемещение UE D2D, так что невозможно, чтобы раз полученная синхронизация действовала бесконечно. Вследствие этого, период действия устанавливается для границы субкадра, как только она определяется. После того как данный период действия истек, граница субкадра может быть повторно установлена после завершения процесса передачи RS субкадра. В данном случае, предполагая, что UE-UE конкуренция имеет место для каждого времени переконфигурации границы субкадра, ненужная задержка времени может возникнуть из-за конфликта RS UE-UE.
[0138] Для того, чтобы решить вышеприведенную проблему, приоритет может быть назначен UE, передавшему действительный RS субкадра, при принятии решения о действующей границе субкадра. Способ для назначения такого приоритета может быть идентичным способу для назначения приоритета внутреннему UE покрытия eNB для использования в упомянутом выше способе назначения приоритета передачи RS. В дополнение, UE, передавшему действительный RS субкадра, при принятие решения о действующей границе субкадра может быть назначен приоритет посредством передачи сигнала подтверждения, независимо от передачи других RS субкадра.
[0139] UE, в котором активируется новая линия связи D2D, может сохранять точно такую же границу субкадра, как и у действующих периферийных UE, осуществляющих действующую связь типа D2D. Для этой цели, UE, в котором активируется новая линия связи D2D, не передает RS субкадра в течение предварительно определенного времени, и может определять наличие или отсутствие RS субкадра, переданных от действующих UE D2D.
[0140] В данном случае, предварительно определенное время, в которое не передается RS субкадра, устанавливается равным периоду действия раз определенной границы субкадра. Если UE, осуществляющее действующую связь типа D2D, располагается в соседней позиции, RS субкадра может быть передан, по меньшей мере, один раз в пределах предварительно определенного времени. Если UE, в котором активируется новая линия связи D2D, не обнаруживает действительного RS субкадра или сигнала подтверждения в течение предварительно определенного времени, UE может непосредственно предпринять попытку передачи RS субкадра.
[0141] Пятый вариант осуществления
[0142] Информация, касающаяся различных параметров, которые должны быть использованы в фактической связи типа D2D, могут содержаться в RS субкадра. В результате, UE, приняв вышеупомянутый RS субкадра, может осуществлять связь типа D2D, используя вышеупомянутые параметры. Параметры, которые могут содержаться в RS субкадра, следующие.
[0143] (1) Информация позиции и размера частотной области, в которой будет осуществлять связь типа D2D.
[0144] - Связь типа D2D может быть реализована на участке, соответствующем вышеприведенной информации размера на основе частотной области, приняв RS субкадра.
[0145] (2) Информация мощности передачи (Tx), которая должна быть использована для связи типа D2D, например, максимальная мощность Tx или различные параметры, показанные в уравнении управления мощностью Tx.
[0146] - Если действующая схема управления мощностью Tx PuSCH, показанная в следующем уравнении 1, используется между eNB и UE без изменения, параметры (PO_PUSCH,c(j), αc(j)) представляются посредством следующего уравнения 1.
[0147] [Уравнение 1]

[0148]
[0149] В Уравнении 1, единицей PO_PUSCH,c(j) является дБм, и PO_PUSCH,c(j) обозначает мощность Tx PUSCH несущей (c) в i-ый момент времени. В частности, PCMAX,c(i) является максимальной мощностью Tx UE по несущей (c), PLc является значением оценки потерь в тракте передачи сигнала нисходящей линии связи, αc(j) и 10log10(MPUSCH,c(i))+ PO_PUSCH,c(j) обозначает параметры на основе сигнала более высокого слоя несущей (c) в i-ый момент времени, атрибуты данных, которые должны быть переданы в i-ый момент времени, объем выделенных ресурсов, и т.д. Параметры могут соответствовать управлению мощностью без обратной связи. В заключении  является значением управления мощностью i-ого момента времени, решение, в отношении которого принято на основании информации, которая содержится в сообщении управления мощностью без обратной связи, принятом от eNB, и может соответствовать параметру для управления мощностью без обратной связи.
является значением управления мощностью i-ого момента времени, решение, в отношении которого принято на основании информации, которая содержится в сообщении управления мощностью без обратной связи, принятом от eNB, и может соответствовать параметру для управления мощностью без обратной связи.
[0150] (3) Информация длины Циклического Префикса (CP), который должен быть использован для связи типа D2D
[0151] - Данная информация (3) длины может указывать на то будет ли использован нормальный CP или расширенный CP, или может указывать на то, будет ли использован CP новой длины при условии, что CP новой длины дополнительно введен для связи типа D2D.
[0152] (4) Длина единицы времени одной передачи D2D
[0153] - Данная информация (4) длины может указывать на то, передается ли один сигнал Tx D2D, используя один субкадр в качестве временной ссылки, может указывать на то, передается ли один сигнал Tx D2D, используя несколько сцепленных субкадров в качестве одной временной ссылки, или может указывать количество сцепленных субкадров, когда сцепляется несколько субкадров.
[0154] (5) Параметры состязания для передачи сигнала D2D
[0155] - Если UE передает сигнал D2D на основании состязания, параметры состязания являются параметрами, которые должны быть использованы для состязания. Например, параметры состязания могут включать в себя значение вероятности передачи (Tx), которое должно быть использовано, когда каждое UE вероятностно передает сигнал D2D в каждое время Tx. В другом примере, каждое UE генерирует/хранит случайные числа в пределах предварительно определенного участка, и вычитает предварительно определенное значение из случайных чисел всякий раз, когда канал пустой. Если результат вычитания равен или меньше предварительно определенному опорному значению, параметры состязания могут включать в себя информацию, касающуюся участку генерации случайных чисел, который должен быть использован при осуществлении передачи.
[0156] В качестве типичного примера способа для включения такой информации в RS субкадра, когда генерируется сигнатура RS субкадра, значения параметра могут быть использованы в качестве переменных. В качестве альтернативы, дополнительный канал для передачи вышеприведенной информации, используя постоянные временные/частотные области, извлеченный из соответствующей сигнатуры, может быть сформирован отдельно от сигнатуры RS субкадра. Например, вышеупомянутая информация может быть передана только в течение предварительно определенного времени после передачи сигнатуры, и вышеупомянутая информация может быть передана посредством канала, передаваемого используя точно такую же частотную область, что и в сигнатуре.
[0157] Вышеупомянутая информация может быть установлена равной конкретному значению, содержащемуся в указании eNB, когда соответствующее UE передает канал с RS субкадра или вышеприведенной информацией по приему сообщения указания eNB. В противоположность, если канал с RS субкадра или вышеприведенной информацией передается без приема сообщения указания eNB за пределами покрытия eNB или без приема RS субкадра, инициированного указанием eNB за пределами покрытия eNB, вышеупомянутая информация может быть установлена в некоторого рода значение по умолчанию каждой UE. То есть, UE может иметь значение по умолчанию, соответствующее различным видам информации во время передачи RS субкадра. Если RS субкадра передается в соответствии с указанием eNB, данное значение по умолчанию может быть изменено на значение, принятое от eNB.
[0158] Фиг. 18 является структурной схемой для примера устройства связи в соответствии с одним вариантом осуществления настоящего изобретения.
[0159] Обращаясь к Фиг. 18, устройство 1800 связи может включать в себя процессор 1810, память 1820, RF модуль 1830, модуль 1840 отображения, и модуль 1850 интерфейса пользователя.
[0160] Поскольку устройство 1800 связи изображено для ясности описания, предписанный модуль(и) может быть опущен частично. Устройство 1800 связи может дополнительно включать в себя необходимый модуль(и). И, предписанный модуль устройства 1800 связи может быть разделен на подразделенные модули. Процессор 1810 выполнен с возможностью выполнения операции в соответствии с вариантами осуществления настоящего изобретения, иллюстрируемыми со ссылкой на чертежи. В частности, подробная операция процессора 1810 может относиться к вышеупомянутому содержимому, описанному со ссылкой на Фиг. 1-17.
[0161] Память 1820 соединена с процессором 1810 и хранит операционную систему, приложения, программные коды, данные и подобное. RF модуль 1830 соединен с процессором 1810 и, следовательно, выполняет функцию преобразования немодулированного сигнала в радиосигнал или функцию преобразования радиосигнала в немодулированный сигнал. С этой целью, RF модуль 1830 выполняет аналоговое преобразование, усиление, фильтрацию, и преобразование с повышением частоты, или выполняет процессы обратные упомянутым выше процессам. Модуль 1840 отображения соединен с процессором 1810 и отображает различного рода информацию. И, модуль 1840 отображения может быть реализован, используя такой широко известный компонент как LCD (жидкокристаллический дисплей), LED (светоизлучающий диод), OLED (органический светоизлучающий диод) дисплей и подобное, которыми настоящее изобретение может быть не ограничено. Модуль 1850 интерфейса пользователя соединен с процессором 1810 и может быть сконфигурирован таким образом, чтобы сочетаться с широко известным интерфейсом, как клавишная панель, сенсорный экран и подобное.
[0162] Описанные выше варианты осуществления соответствуют сочетаниям элементов и признаков настоящего изобретения в предписанных формах. И, соответствующие элементы или признаки могут быть рассмотрены в качестве выборочных до тех пор, пока они явно не упомянуты. Каждый из элементов и признаков может быть реализован в виде без возможности объединения с другими элементами или признаками. Более того, существует возможность реализации варианта осуществления настоящего изобретения посредством объединения элементов и/или признаков вместе частично. Последовательность операций, объясняемых для каждого варианта осуществления настоящего изобретения, может быть модифицирована. Некоторые конфигурации или признаки одного варианта осуществления могут быть включены в другой вариант осуществления или могут быть замещены соответствующими конфигурациями или признаками другого варианта осуществления. И, по-видимому, понятно, что вариант осуществления конфигурируется посредством объединения пунктов формулы изобретения, не имеющих взаимной связи в виде явного упоминания в прилагаемой формуле изобретения или они могут быть включены в качестве новых пунктов посредством внесения изменения после подачи заявки.
[0163] Варианты осуществления настоящего изобретения могут быть реализованы при помощи различных средств. Например, варианты осуществления настоящего изобретения могут быть реализованы при помощи аппаратного обеспечения, встроенного программного обеспечения, программного обеспечения и/или любого их сочетания. При реализации посредством аппаратного обеспечения, способ в соответствии с каждым вариантом осуществления настоящего изобретения может быть реализован посредством, по меньшей мере, одного средства, выбранного из группы, состоящей из: ASIC (специализированных интегральных микросхем), проблемно-ориентированных интегральных микросхем), DSP (цифровых сигнальных процессоров), (цифровых сигнальных процессоров), DSPD (устройств цифровой обработки сигнала), PLD (программируемых логических устройств), FPGA (программируемых вентильных матриц), процессора, контроллера, микроконтроллера, микропроцессора и подобного.
[0164] В случае реализации посредством встроенного программного обеспечения или программного обеспечения, способ в соответствии с каждым вариантом осуществления настоящего изобретения может быть реализован посредством модулей, процедур и/или функций для выполнения объясненных выше функций или операций. Код программного обеспечения хранится в блоке памяти и, следовательно, пригоден для использования процессором. Блок памяти предоставляется внутри или за пределами процессора для осуществления обмена данными с процессором посредством различных публично-известных средств.
[0165] Несмотря на то, что настоящее изобретение было описано и проиллюстрировано в данном документе со ссылкой на его предпочтительные варианты осуществления, специалистам в соответствующей области будет очевидно, что различные модификации и вариации могут быть выполнены здесь, не отступая от сущности и объема изобретения. Таким образом, подразумевается, что настоящее изобретение охватывает модификации и вариации данного изобретения, которые подпадают под объем прилагаемой формулы изобретения и ее эквивалентов.
Промышленная применимость
[0166] Как очевидно из вышеприведенного описания, несмотря на то, что способ и аппаратура для получения синхронизации для непосредственной связи типа D2D за пределами участка покрытия в системе беспроводной связи были раскрыты на основе приложения к 3GPP LTE, концепция изобретения настоящего изобретения применима не только к 3GPP LTE, но также другим системам беспроводной связи.


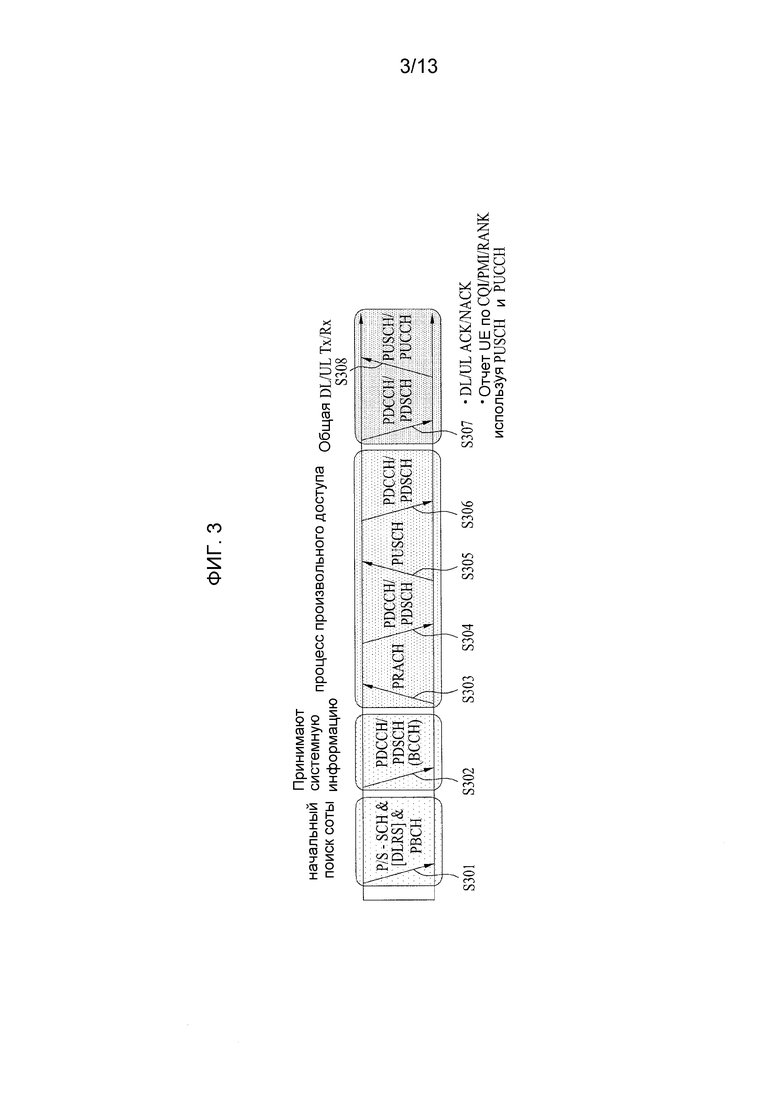
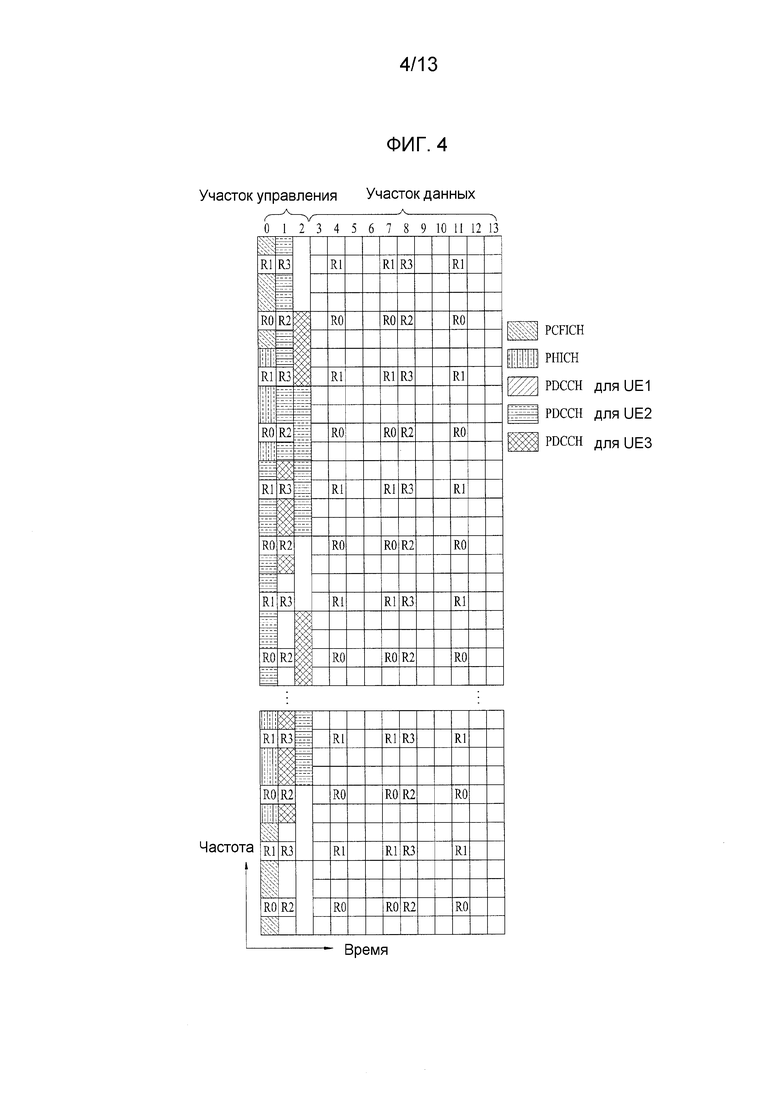
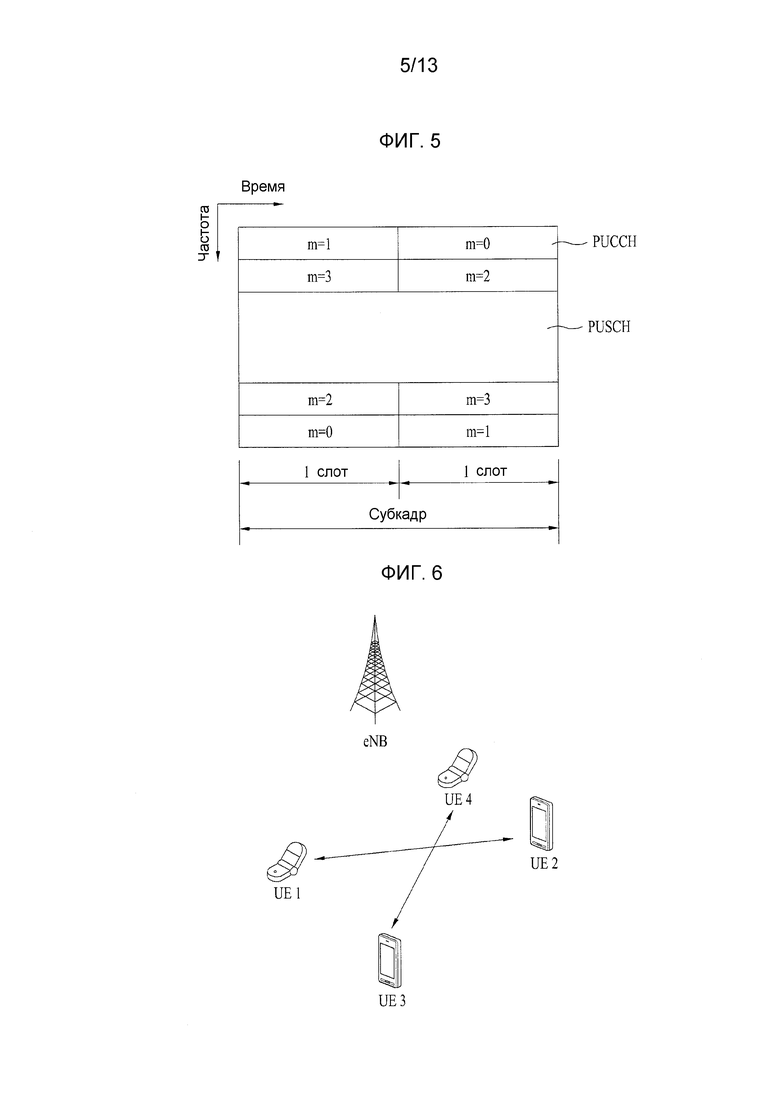
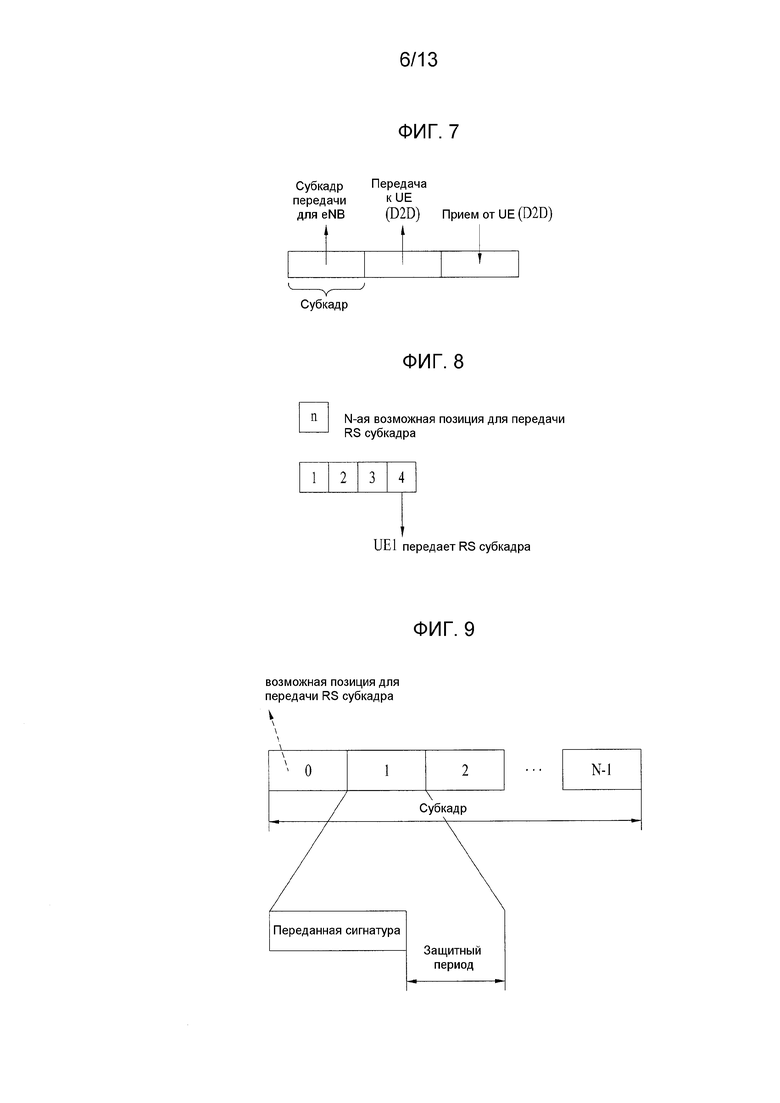
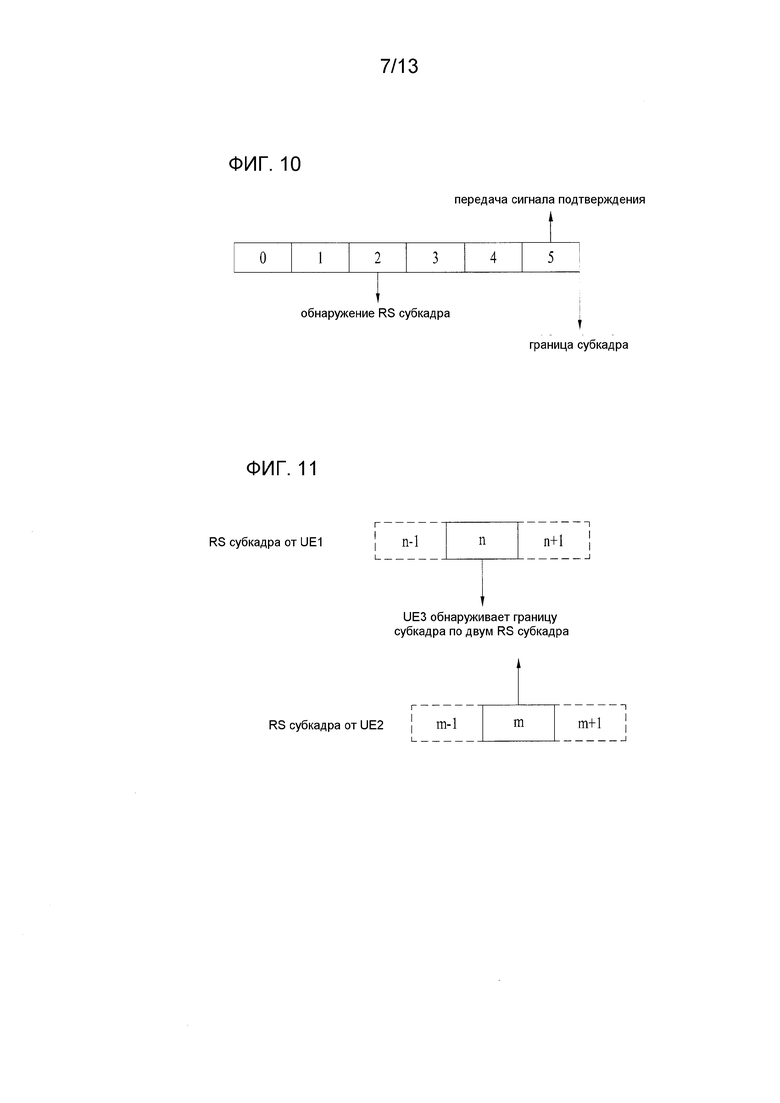


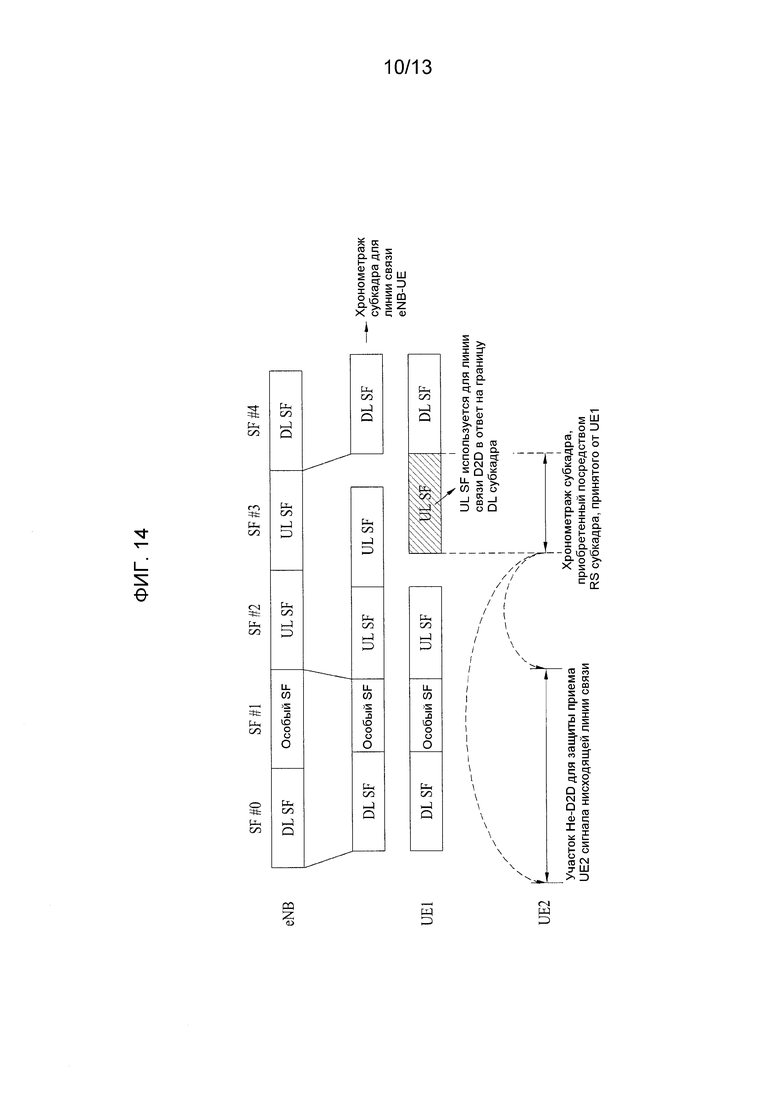
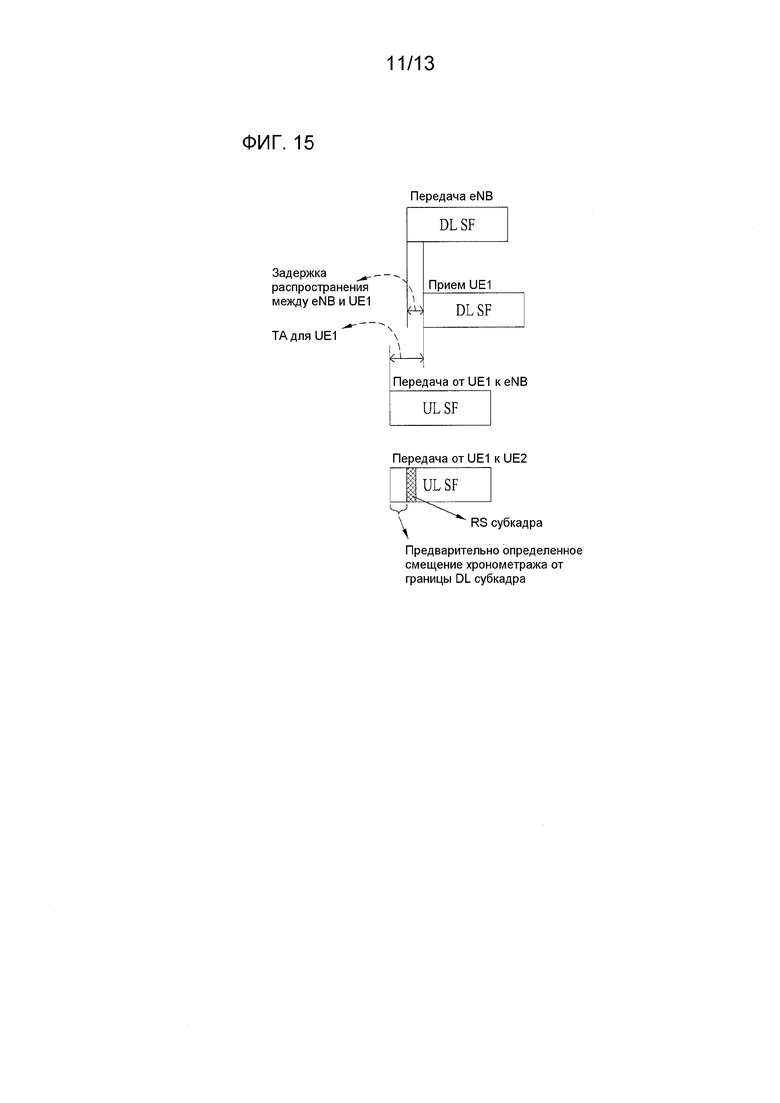

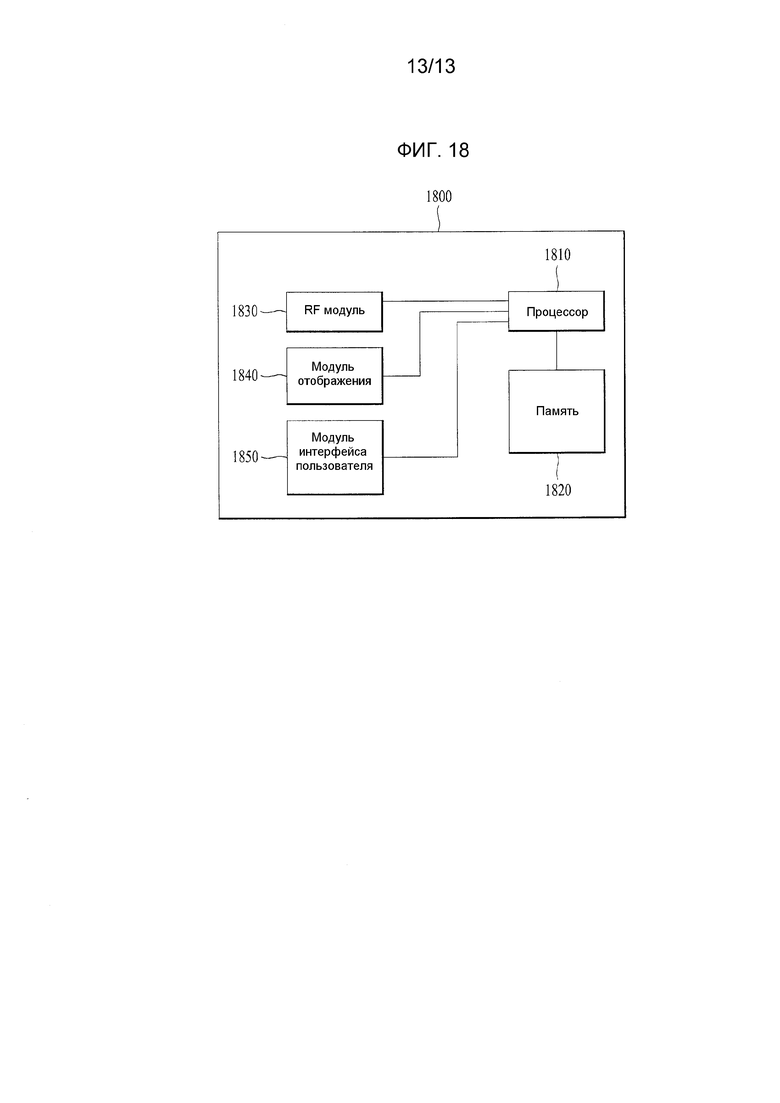
Изобретение относится к системе беспроводной связи, используемой для связи типа Устройство-Устройство, и предназначено для получения синхронизации за пределами участка покрытия системы беспроводной связи. Раскрываемым в настоящем изобретении является способ для осуществления связи типа устройство-устройство между единицами оборудования пользователя за пределами зоны покрытия базовой станции в системе беспроводной связи. В частности, способ содержит этапы, на которых: делят на множество вероятных отрезков конкретную единицу времени для связи типа устройство-устройство; обнаруживают опорный сигнал, который передается от второго оборудования пользователя из числа единиц оборудования пользователя, из одного отрезка вероятных отрезков, который не является последним отрезком; достигают синхронизации для связи типа устройство-устройство со вторым оборудованием пользователя на основании опорного сигнала; и передают предварительно определенный сигнал авторизации на последнем отрезке вероятных отрезков или из единицы времени после конкретной единицы времени. 2 н. и 8 з.п. ф-лы, 19 ил.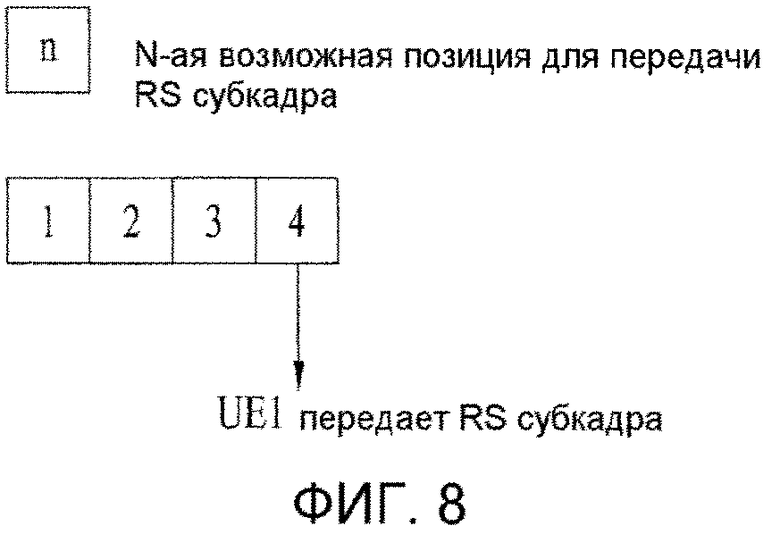
1. Способ передачи сигналов синхронизации для линии связи типа Устройство-Устройство (D2D) на оборудовании пользователя (UE), расположенном за пределами покрытия базовой станции в системе беспроводной связи, при этом способ содержит этапы, на которых:
принимают первый сигнал синхронизации для линии связи типа D2D от первого UE, расположенного в пределах покрытия базовой станции; и
передают второй сигнал синхронизации для линии связи типа D2D,
при этом первый и второй сигналы синхронизации генерируются на основе по меньшей мере одного одинакового параметра.
2. Способ по п. 1, в котором второй сигнал синхронизации является сигналом подтверждения, соответствующим первому сигналу синхронизации.
3. Способ по п. 1, в котором, если второе UE, расположенное за пределами покрытия базовой станции, принимает второй сигнал синхронизации, второе UE достигает синхронизации с базовой станцией, используя второй сигнал синхронизации.
4. Способ по п. 1, в котором первый и второй сигналы синхронизации передаются с использованием разных временных ресурсов.
5. Способ по п. 1, в котором первый и второй сигналы синхронизации включают в себя информацию о полосе пропускания для линии связи типа D2D.
6. Оборудование пользователя (UE) в системе беспроводной связи, содержащее:
радиочастотный (RF) модуль для передачи и приема сигнала с базовой станцией или другим UE; и
процессор для обработки сигнала,
при этом, когда UE располагается за пределами покрытия базовой станции, процессор управляет RF модулем для приема первого сигнала синхронизации для линии связи типа Устройство-Устройство (D2D) от первого UE, расположенного в пределах покрытия базовой станции, и передачи второго сигнала
синхронизации для линии связи типа D2D, сгенерированного с использованием первого сигнала синхронизации,
при этом первый и второй сигналы синхронизации генерируются на основе по меньшей мере одного одинакового параметра.
7. UE по п. 6, при этом второй сигнал синхронизации является сигналом подтверждения, соответствующим первому сигналу синхронизации.
8. UE по п. 6, при этом, если второе UE, расположенное за пределами покрытия базовой станции, принимает второй сигнал синхронизации, второе UE достигает синхронизации с базовой станцией, используя второй сигнал синхронизации.
9. UE по п. 6, при этом первый и второй сигналы синхронизации передаются с использованием разных временных ресурсов.
10. UE по п. 6, при этом первый и второй сигналы синхронизации включают в себя информацию о полосе пропускания для линии связи типа D2D.
| KR 20120129815 A, 28.11.2012 | |||
| KR 20120073147 A, 04.07.2012 | |||
| JP 2006222489 A, 24.08.2006 | |||
| Приспособление для суммирования отрезков прямых линий | 1923 |
|
SU2010A1 |

