Область техники
Настоящее изобретение относится к системе беспроводной связи и, в частности, к способу и устройству для получения синхронизации для прямой связи устройство-устройство (D2D) между пользовательским оборудованием (UE), расположенным в зоне обслуживания, и пользовательским оборудованием (UE), расположенным вне зоны обслуживания, в системе беспроводной связи.
Уровень техники
Система связи 3GPP LTE (долгосрочное развитие проекта партнерства 3-го поколения, далее сокращенно называемое LTE) кратко объясняется в качестве примера системы беспроводной связи, к которой применимо настоящее изобретение.
Фиг. 1 представляет собой схематическую диаграмму структуры сети E-UMTS. E-UMTS (усовершенствованная универсальная система мобильной связи) является системой, развившейся из обычной UMTS (универсальной системы мобильной связи). В настоящее время 3GPP проводит основные работы по стандартизации для E-UMTS. E-UMTS называется системой LTE в общем смысле. В детальном содержании технических спецификаций UMTS и E-UMTS упоминаются выпуск 7 и выпуск 8 документа «Проект партнерства 3-го поколения; сеть радиодоступа группы по разработке технической спецификации», соответственно.
В соответствии с фиг. 1, E-UMTS содержит пользовательское оборудование (UE), усовершенствованный узел В (eNode B, eNB) и шлюз доступа (далее сокращенно называемый AG), соединенные с внешней сетью таким образом, что они располагаются в конечных точках сети (E-UTRAN). eNode B может быть выполнен с возможностью одновременной передачи множества потоков данных для услуги широковещательной передачи, услуги многоадресной передачи и/или услуги одноадресной передачи.
Один eNode B содержит, по меньшей мере, одну соту. Сота обеспечивает услугу передачи по нисходящей линии связи и услугу передачи по восходящей линии связи множеству пользовательских оборудований путем настройки на одну из полос пропускания: 1,25 МГц, 2,5 МГц, 5 МГц, 10 МГц, 15 МГц и 20 МГц. Различные соты могут быть выполнены с возможностью обеспечения соответствующих полос пропускания для соответствующих сот. eNode B управляет передачей/приемом на множество пользовательских оборудований и от них. Для данных нисходящей линии связи (далее сокращенно называемой DL) eNode B информирует соответствующее пользовательское оборудование о временной/частотной области, в которой передаются данные, кодировании, размере данных, информации, относящейся к HARQ (гибридному автоматическому запросу на повторную передачу данных), и т.п. путем передачи информации планирования DL. При этом для данных восходящей линии связи (далее сокращенно называемой UL) eNode B информирует соответствующее пользовательское оборудование о временной/частотной области, используемой соответствующим пользовательским оборудованием, кодировании, размере данных, информации, относящейся к HARQ, и т.п. путем передачи информации планирования UL на соответствующее пользовательское оборудование. Интерфейсы для передачи пользовательского трафика и передачи управляющего трафика могут использоваться между eNode B. Базовая сеть (CN) состоит из AG (шлюза доступа) и сетевого узла для регистрации пользователей пользовательского оборудования и т.п. AG управляет мобильностью пользовательского оборудования с помощью единицы ТА (зоны отслеживания), состоящей из множества сот.
Технологии беспроводной связи вплоть до LTE разработаны на основе WCDMA (широкополосного множественного доступа с кодовым разделением каналов). Тем не менее, существующие запросы и ожидания пользователей и поставщиков услуг постоянно возрастают. Кроме того, поскольку непрерывно разрабатываются различные виды технологий радиодоступа, для обеспечения конкурентоспособности в будущем требуется новое техническое развитие. Для обеспечения конкурентоспособности в будущем требуются снижение стоимости на бит, повышение доступности услуг, использование перестраиваемого диапазона частот, простая конструкция/открытый интерфейс и умеренное энергопотребление пользовательского оборудования и т.п.
Сущность изобретения
Техническая проблема
Целью настоящего изобретения является создание способа и устройства для получения синхронизации для прямой связи устройство-устройство (D2D) между пользовательским оборудованием (UE), расположенным в зоне обслуживания, и пользовательским оборудованием (UE), расположенным вне зоны обслуживания, в системе беспроводной связи.
Техническое решение
Цели настоящего изобретения могут достигаться путем создания способа выполнения прямой связи устройство-устройство (D2D) между первым пользовательским оборудованием (UE), расположенным в зоне обслуживания базовой станции (BS), и вторым пользовательским оборудованием (UE), расположенным вне зоны обслуживания, в системе беспроводной связи, включающего в себя разделение конкретного единичного интервала времени для прямой связи D2D на множество потенциальных периодов; генерирование в одном периоде из числа потенциальных периодов случайного числа и передачу опорного сигнала (RS) для получения синхронизации на второе UE, если случайное число равно или больше порогового значения, соответствующего внутренней области зоны обслуживания, причем пороговое значение, соответствующее внутренней области зоны обслуживания, меньше порогового значения, соответствующего внешней области зоны обслуживания. Указанный один период может предотвращать передачу опорного сигнала (RS) вторым UE, расположенным вне зоны обслуживания.
Способ может дополнительно включать в себя прием инициирующего сообщения для передачи опорного сигнала (RS) для получения синхронизации с базовой станции (BS).
Передача опорного сигнала (RS) для получения синхронизации на второе UE может включать в себя передачу опорного сигнала (RS) для получения синхронизации на второе UE в конкретный момент времени, определяемый на основе либо времени передачи (Тх) по восходящей линии связи в периоде от первого UE до базовой станции (BS), либо времени приема (Rx) по нисходящей линии связи в периоде от базовой станции (BS) до первого UE. Передача опорного сигнала (RS) для получения синхронизации на второе UE может включать в себя передачу опорного сигнала (RS) для получения синхронизации на второе UE в промежуточный момент времени между временем передачи (Тх) по восходящей линии связи в периоде от первого UE до базовой станции (BS) и временем приема (Rx) по нисходящей линии связи в периоде от базовой станции (BS) до первого UE.
Второе UE после приема опорного сигнала (RS) может передавать принятый опорный сигнал (RS) на одно или более других UE, расположенных вне зоны обслуживания, в последнем периоде из числа потенциальных периодов или в следующем единичном интервале времени конкретного единичного интервала времени.
В соответствии с еще одним аспектом настоящего изобретения, пользовательское оборудование (UE) для выполнения прямой связи устройство-устройство (D2D) в системе беспроводной связи включает в себя радиочастотный (RF) модуль, выполненный с возможностью передачи/приема сигнала на/от базовую станцию (BS) или ответное пользовательское оборудование (UE) прямой связи устройство-устройство (D2D); процессор, выполненный с возможностью обработки сигнала, причем процессор управляет RF-модулем таким образом, что он разделяет конкретный единичный интервал времени для прямой связи D2D на множество потенциальных периодов; генерирование в одном периоде из числа потенциальных периодов случайного числа и передачу опорного сигнала (RS) для получения синхронизации на пользовательское оборудование (UE), расположенное вне зоны обслуживания базовой станции (BS), если случайное число равно или больше порогового значения, соответствующего внутренней области зоны обслуживания, причем пороговое значение, соответствующее внутренней области зоны обслуживания, меньше порогового значения, соответствующего внешней области зоны обслуживания. Указанный один период может предотвращать передачу опорного сигнала (RS) пользовательским оборудованием (UE), расположенным вне зоны обслуживания.
Радиочастотный (RF) модуль может принимать инициирующее сообщение для передачи опорного сигнала (RS) для получения синхронизации от базовой станции (BS).
Процессор может определять время передачи (Тх) для передачи опорного сигнала (RS) для получения синхронизации на основе либо времени передачи (Тх) по восходящей линии связи в направлении базовой станции (BS), либо времени приема (Rx) по нисходящей линии связи от базовой станции (BS). Процессор может определять время передачи (Тх) для передачи опорного сигнала (RS) для получения синхронизации как промежуточное время между временем передачи (Тх) по восходящей линии связи в направлении базовой станции (BS) и временем приема (Rx) по нисходящей линии связи от базовой станции (BS).
Пользовательское оборудование (UE), расположенное вне зоны обслуживания базовой станции (BS), после приема опорного сигнала (RS) может передавать принятый опорный сигнал (RS) на одно или более других UE, расположенных вне зоны обслуживания, либо в последнем периоде из числа потенциальных периодов, либо в следующем единичном интервале времени конкретного единичного интервала времени.
Положительные эффекты
В соответствии с примерами осуществления настоящего изобретения, способ и устройство для получения синхронизации могут более эффективно получать синхронизацию для прямой связи устройство-устройство (D2D) между пользовательским оборудованием (UE), расположенным в зоне обслуживания, и пользовательским оборудованием (UE), расположенным вне зоны обслуживания, в системе беспроводной связи.
Специалистам в данной области техники будет понятно, что эффекты, которые могут быть достигнуты с помощью настоящего изобретения, не ограничиваются отдельно описанными выше, при этом другие преимущества настоящего изобретения станут совершенно понятными из нижеследующего подробного описания.
Описание чертежей
Фиг. 1 представляет собой схему, иллюстрирующую структуру сети Усовершенствованной универсальной системы мобильной связи (E-UMTS) в качестве примера системы беспроводной связи.
Фиг. 2 представляет собой схему, иллюстрирующую плоскость управления и плоскость пользователя архитектуры протокола радиоинтерфейса между Пользовательским оборудованием (UE) и Сетью усовершенствованного универсального наземного радиодоступа (E-UTRAN) на основе стандарта сети радиодоступа Проекта партнерства 3-го поколения (3GPP).
Фиг. 3 представляет собой схему, иллюстрирующую физические каналы, используемые в системе 3GPP, и общий способ передачи сигналов с их использованием.
Фиг. 4 представляет собой схему, иллюстрирующую структуру радиокадра нисходящей линии связи, используемого в системе Долгосрочного развития (LTE).
Фиг. 5 представляет собой схему, иллюстрирующую структуру субкадра восходящей линии связи, используемого в системе LTE.
Фиг. 6 представляет собой схему, иллюстрирующую концепцию связи устройство-устройство (D2D).
Фиг. 7 иллюстрирует классификацию субкадров для связи D2D и связи eNB.
Фиг. 8 иллюстрирует способ передачи опорного сигнала (RS) субкадра в соответствии с первым вариантом осуществления настоящего изобретения.
Фиг. 9 иллюстрирует положения кандидатов на передачу опорного сигнала (RS) субкадра с точки зрения одного UE в соответствии с первым вариантом осуществления настоящего изобретения.
Фиг. 10 иллюстрирует прием опорного сигнала (RS) субкадра и передачу сигнала проверки достоверности в соответствии с первым вариантом осуществления настоящего изобретения.
Фиг. 11 представляет собой концептуальную диаграмму, иллюстрирующую пример случая приема множества наложенных опорных сигналов (RS) субкадра в соответствии с первым вариантом осуществления настоящего изобретения.
Фиг. 12 представляет собой концептуальную диаграмму, иллюстрирующую, что граница субкадра нисходящей линии связи и граница субкадра восходящей линии связи изменились, в соответствии с третьим вариантом осуществления настоящего изобретения.
Фиг. 13 представляет собой концептуальную диаграмму, иллюстрирующую способ определения времени передачи (Тх) опорного сигнала (RS) субкадра с использованием границы субкадра нисходящей линии связи в соответствии с третьим вариантом осуществления настоящего изобретения.
Фиг. 14 представляет собой концептуальную диаграмму, иллюстрирующую еще один способ определения времени передачи (Тх) опорного сигнала (RS) субкадра с использованием границы субкадра нисходящей линии связи в соответствии с третьим вариантом осуществления настоящего изобретения.
Фиг. 15 представляет собой концептуальную диаграмму, иллюстрирующую способ определения времени передачи (Тх) опорного сигнала (RS) субкадра с использованием границы субкадра восходящей линии связи в соответствии с третьим вариантом осуществления настоящего изобретения.
Фиг. 16 представляет собой концептуальную диаграмму, иллюстрирующую способ определения времени передачи (Тх) опорного сигнала (RS) субкадра в момент времени между границей субкадра восходящей линии связи и границей субкадра нисходящей линии связи в соответствии с третьим вариантом осуществления настоящего изобретения.
Фиг. 17 представляет собой концептуальную диаграмму, иллюстрирующую способ распространения граничной информации о субкадре, используемом в eNB, на UE, расположенные вне зоны обслуживания, в соответствии с четвертым вариантом осуществления настоящего изобретения.
Фиг. 18 представляет собой блок-схему устройства связи в соответствии с одним из вариантов осуществления настоящего изобретения.
Предпочтительный вариант осуществления
В нижеследующем описании элементы настоящего изобретения, эффекты и прочие характеристики настоящего изобретения легко могут стать доступными для понимания с помощью вариантов осуществления настоящего изобретения, объясняемых со ссылкой на прилагаемые чертежи. Варианты осуществления, объясняемые в нижеследующем описании, являются примерами технических признаков настоящего изобретения, применимых к системе 3GPP.
В данном описании варианты осуществления настоящего изобретения объясняются с использованием системы LTE и системы LTE-А, которые являются лишь примерами. Варианты осуществления настоящего изобретения применимы к различным системам связи, соответствующим приведенному выше определению. В частности, хотя варианты осуществления настоящего изобретения рассматриваются в настоящем описании на основе FDD, оно является лишь примером. Варианты осуществления настоящего изобретения легко могут быть модифицированы и применены к H-FDD или TDD.
Фиг. 2 представляет собой схему структур плоскостей управления и пользователя протокола радиоинтерфейса между пользовательским оборудованием, основанным на стандарте сети радиодоступа 3GPP, и E-UTRAN. Плоскость управления означает путь, по которому передаются управляющие сообщения, используемые пользовательским оборудованием (UE) и сетью для управления вызовом. Плоскость пользователя означает путь, по которому передаются такие данные, генерируемые на прикладном уровне, такие как аудиоинформация, данные межсетевых пакетов и т.п.
Физический уровень, который является 1-м уровнем, предоставляет более высоким уровням услуги передачи информации с помощью физического канала. Физический уровень соединен с уровнем управления доступом к среде, расположенным выше, через транспортный канал (транс-антенный канал). Данные перемещаются между уровнем управления доступом к среде и физическим уровнем по транспортному каналу. Данные перемещаются между физическим уровнем передающей стороны и физическим уровнем принимающей стороны по физическому каналу. Физический канал использует время и частоту в качестве радиоресурсов. В частности, физический уровень модулируется по схеме OFDMA (множественного доступа с ортогональным частотным разделением) в DL, а физический уровень модулируется по схеме SC-FDMA (множественного доступа с частотным разделением с одной несущей) в UL.
Уровень управления доступом к среде (далее сокращенно называемого МАС) 2-го уровня предоставляет услуги уровню управления линией радиосвязи (далее сокращенно называемого RLC), который является верхним уровнем, по логическому каналу. Уровень RLC 2-го уровня обеспечивает надежную передачу данных. Функция уровня RLC может быть реализована функциональным блоком в МАС. Уровень PDCP (протокола преобразования пакетных данных) 2-го уровня выполняет функцию сжатия заголовков для сокращения ненужной управляющей информации, посредством этого передавая такие IP-пакеты в виде пакетов IPv4 и пакетов IPv6 в узкой полосе пропускания радиоинтерфейса.
Уровень управления радиоресурсами (далее сокращенно называемого RRC), расположенный в нижнем положении 3-го уровня, задается только в плоскости управления. Уровень RRC отвечает за управление логическими каналами, транспортными каналами и физическими каналами в связи с конфигурированием, реконфигурированием и выдачей однонаправленных каналов (далее сокращенно называемых RB). RB указывает на услугу, предоставляемую 2-м уровнем, для передачи данных между пользовательским оборудованием и сетью. С этой целью уровень RRC пользовательского оборудования и уровень RRC сети обмениваются сообщением RRC друг с другом. В том случае, если имеется подключение RRC (подключенный RRC) между пользовательским оборудованием и уровнем RRC сети, пользовательское оборудование находится в состоянии подключенного RRC (подключенный режим). В противном случае пользовательское оборудование находится в состоянии ожидания RRC (в режиме ожидания). Уровень слоя без доступа (NAS), расположенный в верхней части уровня RRC, выполняет такую функцию, как управление сеансами, управление мобильностью и т.п.
Одна сота, состоящая из eNode B (eNB), настраивается на одну из полос пропускания 1,25 МГц, 2,5 МГц, 5 МГц, 10 МГц, 15 МГц и 20 МГц, а затем обеспечивает услугу передачи по нисходящей линии связи и восходящей линии связи множеству пользовательских оборудований. Различные соты могут быть выполнены с возможностью обеспечения соответствующих полос пропускания для соответствующих сот.
Транспортные каналы DL для передачи данных от сети к пользовательскому оборудованию содержат ВСН (вещательный канал) для передачи системной информации, РСН (канал поискового вызова) для передачи сообщений поискового вызова, SCH (совместно используемый канал) передачи данных нисходящей линии связи для передачи пользовательского трафика или управляющего сообщения и т.п. Трафик услуги многоадресной/широковещательной передачи или управляющее сообщение DL могут передаваться по SCH DL или отдельному МСН (многоадресному каналу) DL. При этом транспортные каналы UL для передачи данных от пользовательского оборудования к сети включают в себя RACH (канал произвольного доступа) для передачи исходного управляющего сообщения и SCH (совместно используемый канал) передачи данных восходящей линии связи для передачи пользовательского трафика или управляющего сообщения. Логический канал, который расположен выше транспортного канала и отображается в транспортный канал, содержит ВССН (вещательный канал) для передачи системной информации, РCСН (канал управления поисковыми вызовами), СССН (общий канал управления), МССН (канал управления многоадресной передачей), МТСН (канал многоадресного трафика) и т.п.
Фиг. 3 представляет собой схему для объяснения физических каналов, используемых в системе 3GPP, и общего способа передачи сигналов с использованием физических каналов.
Если включается питание пользовательского оборудования или пользовательское оборудование входит в новую соту, пользовательское оборудование может выполнять начальный поиск соты для согласования синхронизации с eNode B и т.п. [S301]. С этой целью пользовательское оборудование может принимать первичный канал синхронизации (P-SCH) и вторичный канал синхронизации (S-SCH) от eNode B, может синхронизироваться с eNode B и может при этом получать информацию, такую как идентификатор (ID) соты и т.п. Затем пользовательское оборудование может принимать физический вещательный канал от eNode B и может при этом иметь возможность получать внутрисотовую вещательную информацию. Между тем, пользовательское оборудование может принимать опорный сигнал нисходящей линии связи (RS DL) на этапе начального поиска соты и может при этом иметь возможность проверять состояние канала DL.
После завершения начального поиска соты пользовательское оборудование может принимать физический совместно используемый канал нисходящей линии связи (PDSCH) в соответствии с физическим каналом управления нисходящей линии связи (PDCCH) и информацию, передаваемую в физическом канале управления нисходящей линии связи (PDCCH). При этом пользовательское оборудование может быть способно получать детальную системную информацию [S302].
Между тем, если пользовательское оборудование сначала осуществляет доступ к eNode B или не имеет радиоресурса для передачи сигнала, пользовательское оборудование может быть способно выполнять процедуру произвольного доступа для завершения доступа к eNode B [S303-S306]. С этой целью пользовательское оборудование может передавать специальную последовательность в качестве преамбулы по физическому каналу произвольного доступа (PRACH) [S303/S305] и может при этом быть способно принимать ответное сообщение по PDCCH и соответствующему PDSCH в ответ на преамбулу [S304/S306]. В случае соревновательной процедуры произвольного доступа (RACH) может оказаться возможным дополнительное выполнение процедуры устранения конфликтов.
После выполнения вышеописанных процедур пользовательское оборудование может быть способно выполнять прием по PDCCH/PDSCH [S307] и передачу по PUSCH/PUCCH (общему физическому каналу восходящей линии связи/физическому каналу управления восходящей линии связи) [S308] в качестве общей процедуры передачи сигнала по восходящей линии связи/нисходящей линии связи. В частности, пользовательское оборудование принимает DCI (управляющую информацию нисходящей линии связи) по PDCCH. В этом случае DCI содержит такую управляющую информацию, как информация о выделении ресурсов пользовательского оборудования. Формат DCI варьируется в соответствии с ее назначением.
Между тем, управляющая информация, передаваемая в eNode B от пользовательского оборудования по UL, или управляющая информация, принимаемая пользовательским оборудованием от eNode B, содержит сигналы подтверждения приема/отрицательного подтверждения приема (ACK/NACK) нисходящей линии связи/восходящей линии связи, CQI (индикатор качества канала), PMI (индикатор матрицы предварительного кодирования), RI (индикатор ранга) и т.п. В случае системы LTE 3GPP пользовательское оборудование может быть способно передавать вышеуказанную управляющую информацию, такую как CQI/PMI/RI и т.п., по PUSCH или PUCCH.
Фиг. 4 иллюстрирует примеры управляющих каналов, включенных в область управления субкадра в радиокадре DL.
В соответствии с фиг. 4, субкадр содержит 14 символов мультиплексирования с ортогональным делением частот (OFDM). Первые символы OFDM субкадра с первого по третий используются для области управления, а другие символы OFDM с 13 по 11 используются для области данных в соответствии с конфигурацией субкадра. На фиг. 5 ссылочные позиции с R1 по R4 обозначают RS или пилотные сигналы для антенн с 0 по 3. RS выделяются по предварительно определенной схеме в субкадре независимо от обрасти управления и области данных. Канал управления выделяется не относящимся к RS ресурсам в области управления, а канал трафика также выделяется не относящимся к RS ресурсам в области данных. Каналы управления, выделяемые области управления, включают в себя Физический индикаторный канал управления форматом (PCFICH), Физический индикаторный канал гибридного Автоматического запроса на повторение (ARQ) (PHICH), Физический канал управления нисходящей линии связи (PDCCH) и т.д.
PCFICH представляет собой физический индикаторный канал управления форматом, несущий информацию о количестве символов OFDM, используемых для PDCCH в каждом субкадре. PCFICH расположен в первом символе OFDM субкадра и сконфигурирован с приоритетом выше PHICH и PDCCH. PCFICH содержит 4 Группы ресурсных элементов (REG), причем каждая REG распределяется в область управления на основе Идентификатора (ID) соты. Одна REG содержит 4 Ресурсных элемента (RE). RE представляет собой минимальный физический ресурс, задаваемый одной поднесущей одним символом OFDM. PCFICH устанавливается равным с 1 по 3 или с 2 по 4 в соответствии с полосой пропускания. PCFICH модулируется с помощью Квадратурной фазовой манипуляции (QPSK).
PHICH представляет собой физический индикаторный канал Гибридного Автоматического запроса на повторение (HARQ), несущий ACK/NACK для передачи по UL. То есть PHICH представляет собой канал, который передает информацию ACK/NACK DL для HARQ UL. PHICH содержит одну REG и шифруется по сотам. ACK/NACK указывается в одном бите и модулируется с помощью Двоичной фазовой манипуляции (BPSK). Моделированное ACK/NACK распространяется с показателем распространения (SF) 2 или 4. Множество PHICH, отображаемых на одни и те же ресурсы, образует группу PHICH. Число PHICH, объединяемых в группу PHICH, определяется в соответствии с числом кодов распространения. PHICH (группа) повторяется три раза для получения эффекта от разнесения в частотной области и/или временной области.
PHICH представляет собой физический канал управления DL, выделяемый первым n символам OFDM субкадра. При этом n представляет собой целое число, равное или большее 1 и указываемое PCFICH. PDCCH занимает один или более ССЕ. PDCCH передает информацию о выделении ресурсов о транспортных каналах РСН и DL-SCH, разрешение на планирование UL и информацию HARQ в каждое UE или группу UE. РСН и DL-SCH передаются по PDSCH. Следовательно, eNB и UE передают и принимают данные обычно по PDSCH за исключением конкретной управляющей информации или конкретных служебных данных.
Информация, указывающая одному или более UE принимать данные PDSCH, и информация, указывающая, как должны приниматься и декодироваться данные PDSCH, передается по PDCCH. Например, если предположить, что Циклическая проверка избыточности (CRC) конкретного PDCCH маскируется Временным идентификатором радиосети (RNTI) «А», а информация о данных, передаваемых в радиоресурсах (например, в некотором частотном положении) «В» на основе информации о транспортном формате (например, размер транспортного блока, схема модуляции, информация о кодировании и т.д.) «С», передается в конкретном субкадре, UE в соте осуществляет мониторинг, т.е. осуществляет слепое декодирование PDCCH с использованием информации RNTI в пространстве поиска. Если одно или более UE имеют RNTI «А», эти UE принимают PDCCH и принимают PDSCH, обозначенный «В» или «С», на основе информации о принятом PDCCH.
Базовый ресурсный блок канала управления DL представляет собой REG. REG содержит четыре смежных RE за исключением RE, содержащих RS. PCFICH и PHICH включают в себя 4 REG и 3 REG соответственно. PDCCH сконфигурирован в блоки Управляющего элемента канала (ССЕ), при этом каждый ССЕ содержит 9 REG.
Фиг. 5 иллюстрирует структуру субкадра UL в системе LTE.
В соответствии с фиг. 5, субкадр UL может быть разделен на область управления и область данных. Физический канал управления восходящей линии связи (PUCCH), содержащий Информацию управления восходящей линии связи (UCI), выделяется области управления, а физический совместно используемый канал восходящей линии связи (PUSCH), содержащий пользовательские данные, выделяется области данных. Средняя часть субкадра выделяется PUSCH, в то время как обе стороны области данных в частотной области выделяются PUCCH. Информация управления, передаваемая по PUCCH, может содержать ACK/NACK HARQ, CQI, соответствующую состоянию канала нисходящей линии связи, RI для множества входов – множества выходов (MIMO) и запрос на планирование (SR), запрашивающий выделение ресурсов UL. PUCCH для одного UE занимает один RB в каждом интервале субкадра. То есть два RB, выделяемые PUCCH, имеют скачкообразную перестройку частоты по всей границе интервала субкадра. В частности, PUCCH с m=0, m=1, m=2 и m=3 выделяются субкадру на фиг. 5.
Фиг. 6 представляет собой схему, иллюстрирующую концепцию связи устройство-устройство (D2D).
В соответствии с фиг. 6, UE1 и UE2 могут выполнять прямую связь D2D друг с другом, а UE3 и UE4 также могут выполнять прямую связь D2D друг с другом. eNB может управлять положением временных/частотных ресурсов, мощностью Тх и т.д. для прямой связи UE-UE с помощью подходящего управляющего сигнала. Однако, если UE расположены вне зоны обслуживания eNB, прямая связь UE-UE может обеспечиваться без использования управляющего сигнала eNB. Для удобства описания прямая связь UE-UE будет далее называться связью D2D (устройство-устройство).
UE, расположенное в зоне обслуживания eNB, должно осуществлять обмен данными с eNB одновременно с выполнением связи D2D. Один способ для этой цели состоит в разбиении всех субкадров на субкадры для связи eNB и субкадры для связи D2D. Фиг. 7 иллюстрирует разбиение субкадров на субкадры для связи D2D и для связи eNB.
В соответствии с фиг. 7, UE, выполненное с возможностью выполнения связи D2D с использованием полосы пропускания восходящей линии связи системы FDD, передает сигнал восходящей линии связи на eNB в первом субкадре, показанном на фиг. 7, передает сигнал D2D на другое UE во втором субкадре и принимает сигнал D2D от другого UE в третьем субкадре. С помощью вышеописанной операции может быть решена проблема помех, встречающаяся между связью D2D и связью eNB, при этом связь D2D имеет структуры Тх/Rx на основе субкадров и легко может быть объединена со связью eNB во временной области.
В этом случае, если связь D2D имеет структуру Тх/Rx на основе субкадров, это означает, что временная область, занимаемая одним сигналом Тх D2D, является временной областью, занимаемой одним субкадром, а базовый единичный интервал времени, в котором UE передает или принимает сигнал D2D, используется в качестве одного субкадра. Не вызывает сомнения, что конкатенация множества субкадров при необходимости может достигаться в единицах базового времени.
Между тем, ситуация, в которой связь D2D имеет основанную на субкадрах структуру, может эффективно использоваться даже в тех случаях, когда UE, расположенное вне зоны обслуживания eNB, осуществляет связь D2D. Например, даже в тех случаях, когда конкретное UE расположено вне зоны обслуживания eNB, основанная на субкадрах структура имеет преимущество, состоящее в том, что UE, выступающее в качестве целевого объекта связи D2D, может связываться с eNB с использованием тех же субкадров, содержащихся в зоне обслуживания eNB. Кроме того, даже в тех случаях, когда все UE D2D расположены вне зоны обслуживания eNB, основанная на субкадрах структура имеет преимущество, поскольку связь обеспечивается таким образом, что различные линии связи D2D занимают различные субкадры, когда несколько линий связи D2D примыкают друг к другу, как показано на фиг. 6, приводя к предотвращению взаимных помех.
С целью осуществления связи D2D на основе субкадров граничное положение, в котором начинается субкадр, должно однозначно распознаваться UE, участвующим в связи D2D. В качестве общего способа для распознавания границы субкадра передается опорный сигнал (далее называемый опорным сигналом субкадра), имеющий уникальные атрибуты, указывающие на границу субкадра, при этом UE после приема опорного сигнала может получить границу субкадра по соответствующему положению опорного сигнала (RS) субкадра. Например, конкретное положение, расположенное на предварительно определенном расстоянии от момента времени приема (Rx) RS субкадра, может быть определено как граница субкадра.
Если UE D2D расположено в зоне обслуживания eNB, eNB может передавать этот RS субкадра. В частности, RS субкадра, передаваемый от eNB, не передается отдельно для D2D, при этом RS субкадра может передаваться для конфигурирования положения субкадра традиционной связи eNB-UE. То есть UE, расположенное в зоне обслуживания eNB, может принимать конкретный сигнал от eNB, чтобы с самого начала осуществить доступ к eNB. В случае системы LTE предполагается, что UE, расположенное в зоне обслуживания eNB, может принимать первичный сигнал синхронизации (PSS) и вторичный сигнал синхронизации (SSS) и может распознавать границу субкадра, управляемого eNB, с помощью PSS и SSS, чтобы граница субкадра могла быть применена к связи D2D без изменения или могла быть изменена в соответствии с предварительно определенным правилом, а затем быть применена к связи D2D.
Напротив, если UE D2D расположена вне зоны обслуживания eNB, вышеописанную операцию выполнить невозможно. Таким образом, UE должно непосредственно передавать RS субкадра таким образом, чтобы границы субкадра между UE D2D были идентичны друг другу.
Первый вариант осуществления
Далее подробно описывается способ, позволяющий UE передавать RS субкадра.
Если UE передает RS субкадра, предпочтительно, чтобы один RS субкадра передавался среди смежных UE. С этой целью, когда конкретное UE пытается передавать RS субкадра, наличие или отсутствие RS субкадра, передаваемого от другого UE, подтверждается в изначально задаваемый момент времени. В первом варианте осуществления предлагается способ передачи RS субкадра с предварительно определенной вероятностью только в тех случаях, когда RS субкадра, передаваемый от другого UE, отсутствует. То есть несколько UE наблюдают положение кандидатов RS субкадра. Если каждое UE не обнаруживает какой-либо RS субкадра в предыдущем положении кандидата, UE пытается передавать RS субкадра с предварительно определенной вероятностью в следующем положении кандидата.
Фиг. 8 иллюстрирует способ передачи опорного сигнала (RS) субкадра в соответствии с первым вариантом осуществления настоящего изобретения.
Из фиг. 8 можно понять, что RS субкадра не передается в качестве потенциальных положений (1, 2, 3) для передачи RS субкадра, поскольку передача RS во всех UE не обеспечивается на этапе принятия решения о том, осуществляется ли стохастическая передача. В потенциальном положении 4 UE1 определяет передачу на этапе принятия решения о стохастической передаче/непередаче, чтобы UE1 могло передавать RS субкадра. Кроме того, UE после приема RS субкадра от другого UE может рассматривать соответствующий RS в качестве единственного RS в течение, по меньшей мере, предварительно определенного времени, при этом предпочтительно, чтобы прекращались дополнительные попытки передачи RS субкадра.
Вышеуказанная операция, при которой единственное UE из числа нескольких UE, выполненных с возможностью стохастической передачи RS субкадра, может выполнять последнюю передачу, далее будет называться схемой передачи RS субкадра на основе соревнования UE-UE. Различные способы реализации схемы передачи RS субкадра на основе соревнования UE-UE могут включать в себя нижеследующие первый и второй способы (1) и (2).
1) В процессе принятия решения о том, обеспечивается ли стохастическая передача, генерируются случайные числа в соответствии с предварительно определенным правилом в каждом потенциальном положении Тх. Если каждое из случайных чисел больше (или меньше) опорного значения, определяемого заданной вероятностью передачи, UE может приводить к передаче опорного сигнала.
2) В соответствии с другим вариантом, случайные числа генерируются и сохраняются в соответствии с предварительно определенным правилом (которое существует между предварительно определенным минимальным значением и максимальным значением) в положении первого кандидата. Если RS субкадра не передается в каждом потенциальном положении, из сохраненного значения вычитается предварительно определенное значение, и результат вычитания вновь сохраняется. Если сохраненное значение меньше или равно предварительно определенной опорной величине, путем выполнения таких действий вычитания и сохранения UE может действовать таким образом, что RS субкадра может быть передан.
Если RS субкадра предается в соответствии с вышеуказанным правилом, все UE D2D после приема RS субкадра могут определять положение границы субкадра на основе принятого RS субкадра. UE D2D после передачи RS субкадра предполагает, что RS субкадра, переданный от UE D2D, был перенесен в смежные UE, поэтому положение границы субкадра определено. Детальный пример схемы передачи RS субкадра на основе соревнования UE-UE будет приведен ниже.
Фиг. 9 иллюстрирует положения кандидатов на передачу опорного сигнала (RS) субкадра с точки зрения одного UE в соответствии с первым вариантом осуществления настоящего изобретения. В частности, фиг. 9 иллюстрирует, что период времени, соответствующий одном субкадру, состоит в целом из N потенциальных положений, варьирующихся от 0 до N-1.
В соответствии с фиг. 9, одно потенциальное положение для передачи RS субкадра может включать в себя период передачи сигнатуры реального опорного сигнала (RS) и защитное поле, выполненное с возможностью обеспечения конкретного времени, необходимого для перехода в положение Rx в следующем потенциальном положении после завершения передачи. В этом случае защитное поле может быть исключено, если время перехода к операции Rx не является необходимым.
В частности, частотное положение опорного сигнала (RS), передаваемого UE в каждом потенциальном положении, и/или сигнатура могут определяться индикатором потенциального положения. Например, сигнатуре RS, передаваемого в потенциальном положении (n), может быть задана передача в частотной области, соответствующей соответствующему потенциальному положению, при этом сигнатура, передаваемая в другом потенциальном положении, и сигнатура RS, переданного в потенциальном положении (n), могут занимать различные частотные области. Кроме того, сигнатуре RS, переданного в потенциальном положении (n), может быть задано использование последовательности, отличной от сигнатур в других потенциальных положениях. Например, индикатор (n) потенциального положения может содержаться в конкретном значении для инициализации последовательности сигнатуры. Разумеется, к RS субкадра добавляется информация, относящаяся к предварительно определенному числу битов, чтобы можно было указать потенциальное положение.
С помощью вышеуказанной операции UE, принявшее сигнатуру конкретного RS субкадра, может позволить другому UE, передавшему соответствующую сигнатуру, выявить, какое потенциальное положение связано с соответствующей сигнатурой с точки зрения UE, передавшего соответствующую сигнатуру, а также выявить, какое потенциальное положение является положением передачи соответствующей сигнатуры. Следовательно, UE приема (Rx) может выявить границу субкадра с точки зрения соответствующей передачи (Тх) UE на основе времени Rx соответствующей сигнатуры и индикатора потенциального положения соответствующей сигнатуры.
Между тем, некоторые последние потенциальные положения могут использоваться для передачи сигнала проверки достоверности, указывающего, успешно ли передан RS субкадра. То есть, если предположить, что конкретное UE D2D успешно приняло RS субкадра во внутреннем потенциальном положении конкретного субкадра, сигнал проверки достоверности предается в последнем потенциальном положении, чтобы информировать передачу UE об успешном приеме. Передача такого сигнала проверки достоверности дает эффект ретрансляции RS субкадра. Кроме того, сигнал проверки достоверности не всегда может передаваться в том же субкадре, что и RS субкадра, либо не всегда может передаваться в последнем потенциальном положении. Сигнал проверки достоверности может передаваться в предварительно определенном потенциальном положении либо может также передаваться после успешной передачи RS субкадра.
Фиг. 10 иллюстрирует прием опорного сигнала (RS) субкадра и передачу сигнала проверки достоверности в соответствии с первым вариантом осуществления настоящего изобретения.
В соответствии с фиг. 10, при условии, что один субкадр состоит в целом из 6 потенциальных положений, UE может принимать RS субкадра в потенциальном положении 2. По прошествии трех потенциальных положений UE может выявить возникновение новой границы субкадра. После этого UE может передавать сигнал проверки достоверности в потенциальном положении 5, указывающем на последнее потенциальное положение соответствующего субкадра.
Сигнал проверки достоверности может быть идентичным RS субкадра по структуре. Для разграничения сигнала проверки достоверности сигнал проверки достоверности может занимать частотное положение и/или может различаться по сигнатуре совместно с другими RS субкадра. UE (т.е. центральное UE), передавшее RS субкадра в конкретном субкадре, может определить, что RS субкадра был успешно передан, при условии, что обнаружен сигнал проверки достоверности соответствующего субкадра, и, следовательно, в ответ на границу субкадра осуществляется связь D2D.
В частности, все или некоторые UE, принявшие RS субкадра, могут одновременно передавать сигнал проверки достоверности. В этом случае сигнал проверки достоверности может быть сформирован в виде наложения нескольких сигналов передачи UE, чтобы сигнал проверки достоверности мог передаваться при более высокой мощности. Если конкретное UE не принимает RS субкадра в конкретном субкадре, а принимает сигнал проверки достоверности для RS субкадра в конкретном субкадре, граница субкадра может устанавливаться на основе сигнала проверки достоверности. Однако существует вероятность того, что конкретное UE из числа UE, принявших RS субкадра, принимает различные RS субкадра, имеющие различную мощность. Данное конкретное UE может не участвовать в одновременной передаче сигнала проверки достоверности. Вышеописанная ситуация может указывать на то, что UE может выбирать один из нескольких RS субкадра, принятых UE, и передавать сигнал проверки достоверности, соответствующий выбранному RS субкадра. UE, передавшее RS субкадра, может предполагать, что опорный сигнал (RS), переданный от UE, был принят с доступной максимальной мощностью.
Конкретное UE может принимать множество RS субкадра, наложенных друг на друга, с интервалами большой временной разности внутри конкретного субкадра, при этом их подробное описание будет приведено ниже со ссылкой на прилагаемые чертежи. Фиг. 11 представляет собой концептуальную диаграмму, иллюстрирующую пример случая приема множества наложенных опорных сигналов (RS) субкадра в соответствии с первым вариантом осуществления настоящего изобретения.
В этом случае UE может выявить возникновение сбоя приема RS субкадра (т.е. конфликта RS субкадра), чтобы UE могла не передавать сигнал проверки достоверности. В соответствии с другим вариантом, может также передаваться сигнал отсутствия проверки достоверности, указывающий на возникновение конфликта между RS субкадра.
UE передачи RS субкадра, которые не приняли сигнал проверки достоверности или приняли сигнал непроверки достоверности, могут предположить сбой получения границ субкадра в соответствующем субкадре и могут вновь выполнить основанную на соревнованиях передачу RS субкадра в следующем субкадре. При условии, что конкретное UE передает RS субкадра, не принимает сигнал проверки достоверности, соответствующий его собственному сигналу Тх, и принимает сигнал проверки достоверности, соответствующий другому RS субкадра, граница субкадра может быть сформирована в ответ на принимаемый сигнал проверки достоверности.
Между тем, в соответствии с еще одним способом передачи сигнала проверки достоверности, когда используется основанная на соревнованиях схема передачи RS субкадра, если конкретное UE приняло RS субкадра, действительный в потенциальном положении (n), RS субкадра, имеющие такие же атрибуты, как и атрибуты соответствующего RS субкадра, могут передаваться во всех последующих потенциальных положениях (т.е. потенциальных положениях n+1, n+2 и т.д.). Если предположить, что одно конкретное UE из числа множества соревнующихся UE одной группы с самого начала передает RS субкадра, все остальные UE, принявшие RS субкадра, могут одновременно передавать один и тот же RS субкадра в последующих потенциальных положениях, чтобы RS субкадра мог распространяться в более широкую область.
Второй вариант осуществления
Между тем, вышеуказанная схема передачи RS субкадра на основе соревнования UE-UE может эффективно использоваться в тех случаях, когда все UE расположены вне зоны обслуживания eNB. Следовательно, основанная на соревнованиях схема передачи RS субкадра может быть применена только к случаю, в котором UE расположено вне зоны обслуживания eNB. В случае UE, расположенного в зоне обслуживания eNB, основанная на соревнованиях схема передачи RS субкадра может быть применена только к случаю, в котором использование основанной на соревнованиях UE-UE схемы передачи RS субкадра указано в явной форме.
То обстоятельство, что UE расположено вне зоны обслуживания eNB, может указывать на первый случай (а), в котором PSS/SSS, передаваемый от eNB, не обнаруживается на конкретной несущей, либо второй случай (b), в котором Принимаемая мощность опорного сигнала (RSRP) и/или Принимаемое качество опорного сигнала (RSRQ), измеряемые на конкретной несущей, могут быть меньше или равны конкретному опорному значению.
В этом случае конкретная несущая представляет собой несущую, необходимую для связи D2D. В частности, если связь D2D осуществляется на несущей нисходящей линии связи системы FDD, либо если связь D2D осуществляется на несущей, связанной с несущей, необходимой для связи D2D (т.е., если связь D2D осуществляется на несущей восходящей линии связи системы FDD), конкретная несущая может представлять собой несущую нисходящей линии связи, связанную с несущей восходящей линии связи, на которой планируется осуществление соответствующей связи D2D. В соответствии с другим вариантом, если невозможно осуществить доступ к eNB с помощью любой несущей, опорная величина может также быть изменена на случай, в котором UE удовлетворяет вышеуказанному условию на всех несущих, способных приниматься, чтобы можно было ограничивать основанную на соревнованиях UE-UE схему передачи RS субкадра.
Если некоторые UE расположены в зоне обслуживания eNB, и если UE, выполненное с возможностью осуществления связи D2D с соответствующими UE, устанавливает границу субкадра на основе произвольного времени вне зоны обслуживания eNB, становится сложным выполнять вышеуказанные операции. Предпочтительно граница субкадра для связи D2D соответствующего UE может быть идентичной границе субкадра для связи eNB. Настоящее изобретение может позволить UE, расположенному в зоне обслуживания eNB, иметь приоритет перед другим UE, расположенным вне зоны обслуживания eNB, с точки зрения передачи RS субкадра. Для такого назначения приоритета могут использоваться нижеследующие способы (а) и (b).
а) Прежде всего, может существовать низкая вероятность того, что UE, расположенное вне зоны обслуживания eNB, передает RS субкадра, и может существовать высокая вероятность того, что UE, расположенное в зоне обслуживания eNB, передает RS субкадра. Способ (а) может быть реализован в соответствии со способом (1) из числа основанных на соревнованиях способах передачи RS субкадра. Более подробно, опорное значение, используемое UE, расположенным вне зоны обслуживания eNB, может устанавливаться меньшим, чем опорное значение, используемое другим UE, расположенным в зоне обслуживания eNB (когда RS субкадра передается с использованием случайных чисел, каждое из которых меньше опорного значения), либо может устанавливаться большим, чем опорное значение, используемое другим UE, расположенным в зоне обслуживания eNB (когда RS субкадра передается с использованием случайных чисел, каждое из которых больше опорного значения), чтобы можно было реализовать способ (а). Если способ (а) применяется к способу (2) из числа основанных на соревнованиях способах передачи RS субкадра, максимальное случайное число, генерируемое от UE, расположенного вне зоны обслуживания eNB, устанавливается более высоким, чем максимальное случайное число, генерируемое от другого UE, расположенного в зоне обслуживания eNB, чтобы можно было реализовать способ (а).
b) В соответствии с другим вариантом, UE, расположенное вне зоны обслуживания eNB, не передает RS субкадра в некоторых начальных потенциальных положениях Тх, чтобы соответствующие потенциальные положения могли использоваться для операции Тх UE, расположенным в зоне обслуживания eNB. Если способ (b) применяется к способу (а) из числа основанных на соревнованиях способов передачи RS субкадра, способ (b) может быть реализован путем задания значения 0 вероятности Тх UE, расположенным вне зоны обслуживания eNB в некоторых начальных потенциальных положениях. Если способ (b) применяется к способу (s) из числа основанных на соревнованиях способов передачи RS субкадра, минимальное случайное число, генерируемое от UE, расположенного вне зоны обслуживания eNB, может устанавливаться более высоким, чем минимальное случайное число, генерируемое от другого UE, расположенного в зоне обслуживания eNB, чтобы можно было реализовать способ (b). Кроме того, минимальное случайное число, генерируемое от UE, расположенного вне зоны обслуживания eNB, может устанавливаться равным или большим, чем минимальное случайное число, генерируемое от другого UE, расположенного в зоне обслуживания eNB, чтобы UE, расположенное вне зоны обслуживания eNB, всегда могло выполнять передачу после завершения операций UE, расположенного в зоне обслуживания eNB.
Кроме того, при предположении, что имеется действительный период, когда используется RS выбранного субкадра, UE могут повторно передавать RS субкадра на основе соревнований после истечения соответствующего действительного периода. В этом случае время истечения действительного периода немедленно может быть установлено равным времени начала потенциальных положений времени передачи RS субкадра. В случае использования способа (1) из числа основанных на соревнованиях способов передачи RS субкадра, если UE генерирует значение случайного числа и не передает RS в потенциальном положении, UE может начать уменьшать значение случайного числа, как только истечет действительный период предыдущего RS. В случае использования способа (2) из числа основанных на соревнованиях способов передачи RS субкадра UE, имеющее низкий приоритет и расположенное вне зоны обслуживания eNB, может не передавать RS субкадра в течение предварительно определенного времени, начинающегося с момента времени истечения действительного времени RS субкадра, используемого в качестве традиционного опорного значения.
Третий вариант осуществления
Между тем, UE, расположенное в зоне обслуживания eNB, может получить границу субкадра на основе сигнала, передаваемого от eNB, как описано выше, но имеется необходимость в том, чтобы UE, расположенное в зоне обслуживания eNB, передавало RS субкадра таким образом, чтобы другое UE, расположенное вне зоны обслуживания eNB, могло получать ту же границу субкадра. С этой целью eNB может выдавать конкретному UE команду на передачу RS субкадра с помощью сигнализации верхнего уровня, такой как сигнализация RRC.
Такую индикацию передачи можно разбить на прямую индикацию и косвенную индикацию. Прямая индикация может в явном виде указывать на положение частотных/временных ресурсов RS субкадра, информацию о сигнатуре RS, мощность Тх и т.д., которые планируются к передаче от соответствующего UE к конкретному UE. Косвенная индикация может позволять eNB передавать RS субкадра либо на конкретное UE, либо на группу UE, состоящую из нескольких UE, в соответствии с основанным на соревнованиях способом передачи RS субкадра. Косвенная индикация может включать в себя атрибуты RS субкадра, например, положение частотных/временных ресурсов RS, информацию о сигнатуре RS, мощность Тх и т.д.
После того, как UE, расположенное в зоне обслуживания eNB, принимает индикацию передачи (Тх) eNB, UE может передавать RS субкадра в соответствии с принятой индикацией Тх. Ресурсам нисходящей линии связи чрезмерно мешает мощность Тх eNB, поэтому область поступления RS субкадра может быть чрезмерно ограниченной, при этом ресурсы UL могут использоваться в качестве ресурсов передачи RS субкадра.
Начальная точка субкадра UL регулируется в соответствии с различными значениями продвижения синхронизации отдельных UE, чтобы сместить задержку распространения между eNB и UE, и, следовательно, сигналы Тх нескольких UE могут поступать в eNB в один и тот же момент времени. В результате этого граница субкадра нисходящей линии связи UE, расположенного в зоне обслуживания eNB, отличается от границы субкадра восходящей линии связи UE, расположенного в зоне обслуживания eNB. Фиг. 12 представляет собой концептуальную диаграмму, иллюстрирующую, что граница субкадра нисходящей линии связи и граница субкадра восходящей линии связи изменились, в соответствии с третьим вариантом осуществления настоящего изобретения.
В этом случае UE после приема индикаторного сообщения RS субкадра от eNB должна определить, какая из границы субкадра DL и границы субкадра UL будет использоваться для передачи RS субкадра. В соответствии с необходимостью может использоваться один из нижеследующих способов принятия решения о времени передачи RS субкадра.
i) В качестве первого способа принятия решения о времени передачи (Тх) RS субкадра время передачи RS субкадра может определяться на основе границы субкадра DL.
Опорный сигнал (RS), передаваемый от UE, может передаваться в граничном положении субкадра DL, принимаемого UE, либо может передаваться в конкретном положении, смещенном относительно граничного положения субкадра DL на предварительно определенное время.
Фиг. 13 представляет собой концептуальную диаграмму, иллюстрирующую способ определения времени передачи (Тх) опорного сигнала (RS) субкадра с использованием границы субкадра нисходящей линии связи в соответствии с третьим вариантом осуществления настоящего изобретения. В частности, фиг. 13 иллюстрирует, что RS субкадра задерживается относительно граничного положения субкадра DL на предварительно определенное время (т.е. смещается), а затем передается. На фиг. 13 предполагается, что UE1, расположенное в зоне обслуживания, передает RS субкадра на UE2, расположенное вне зоны обслуживания. Разумеется, RS субкадра может также передаваться в конкретное время, более раннее, чем предварительно определенное время (т.е. смещаться) на основе границы субкадра DL в пределах объема или сущности настоящего изобретения.
Вышеуказанная схема имеет преимущество, состоящее в том, что граничное положение субкадра DL UE (передавшего соответствующий RS субкадра), расположенного в зоне обслуживания, может выявляться другими UE, расположенными вне зоны обслуживания. В частности, в случае использования системы TDD сигнал, передаваемый от внешнего UE зоны обслуживания для связи D2D, может создавать сильные помехи внутреннему UE зоны обслуживания, когда внутреннее UE зоны обслуживания принимает сигнал DL. В этом случае при предположении, что внешнее UE зоны обслуживания может выявлять граничное положение субкадра DL внутреннего UE зоны обслуживания, прием сигнала нисходящей линии связи внутреннего UE соответствующей зоны обслуживания может быть эффективно защищен, и его подробное описание приводится ниже со ссылками на прилагаемые чертежи.
Фиг. 14 представляет собой концептуальную диаграмму, иллюстрирующую еще один способ определения времени передачи (Тх) опорного сигнала (RS) субкадра с использованием границы субкадра нисходящей линии связи в соответствии с третьим вариантом осуществления настоящего изобретения.
В соответствии с фиг. 14, передача сигнала D2D исключается в предварительно определенный период времени, получаемый по положению границы субкадра, принимаемому внешним UE зоны обслуживания, чтобы прием важных сигналов DL внутреннего UE смежной зоны обслуживания мог быть защищенным. В соответствии с другим вариантом, в течение соответствующего периода времени мощность передачи D2D может быть понижена путем предварительно определенного смещения, либо максимальная мощность Тх может быть установлена равной более низкой мощности, при этом прием сигнала DL внутреннего UE зоны обслуживания может быть защищен, но может обеспечиваться связь D2D со смежным UE, расположенным очень близко к внутреннему UE.
На фиг. 14 UE1 может повторно регулировать субкадр № 3 в ответ на границу субкадра DL и может использовать субкадр № 3 для передачи RS субкадра. UE2, расположенное вне зоны обслуживания, может получать расчетное значение границы субкадра DL UE1 и может не применять период времени, выбираемый с помощью предварительно определенного правила на основе соответствующего расчетного значения, к связи D2D, чтобы UE1 могло без труда принимать сигнал DL в субкадре №1 и субкадре №2. В этом случае период, неиспользуемый для связи D2D, может возникать многократно.
Кроме того, если RS субкадра передается в ответ на границу субкадра DL, как описано выше, следующий сигнал Tx/Rx D2D может также передаваться и приниматься на основе границы субкадра DL. В частности, следующий сигнал Tx/Rx D2D может также применяться к сигналу D2D, с помощью которого могут передаваться данные с использованием большого количества ресурсов. Между тем, сигнал обнаружения D2D для выявления того, расположено ли UE в смежном положении, может также иметь другие границы субкадра.
ii) В качестве второго способа принятия решения о времени передачи (Тх) RS субкадра время передачи RS субкадра может определяться на основе границы субкадра UL.
RS, передаваемый UE, может передаваться в граничном положении субкадра UL, в котором UE передает RS в eNB, либо может передаваться в конкретном положении, смещенном относительно граничного положения субкадра UL на предварительно определенное время.
Фиг. 15 представляет собой концептуальную диаграмму, иллюстрирующую способ определения времени передачи (Тх) опорного сигнала (RS) субкадра с использованием границы субкадра восходящей линии связи в соответствии с третьим вариантом осуществления настоящего изобретения. На фиг. 15 предполагается, что UE1, расположенное в зоне обслуживания, передает RS субкадра в UE2, расположенное вне зоны обслуживания.
Вышеуказанная схема отличается тем, что внешнее UE зоны обслуживания может получать границу субкадра UL внутреннего UE зоны обслуживания, чтобы внутреннее UE зоны обслуживания могло осуществлять связь D2D с внешним UE зоны обслуживания и в то же время могло без труда выполнять передачу сигналов в eNB в другом смежном субкадре UL. В частности, вышеуказанное преимущество может считаться эффективным в системе FDD, в которой все субкадры конкретной частотной области выполняют роль субкадров UL. В этом случае субкадры DL отделяются от субкадров UL, имеющих связь D2D в частотной области, поэтому защитный интервал для приема DL, изображенный на фиг. 14, не обязательно должен использоваться.
Кроме того, если RS субкадра передается в ответ на границу субкадра UL, следующий сигнал Tx/Rx D2D может также передаваться и приниматься на основе границы субкадра UL. В частности, следующий сигнал Tx/Rx D2D может также применяться к сигналу D2D, с помощью которого данные могут передаваться с использованием большого количества ресурсов. Аналогичным образом, сигнал обнаружения D2D для выявления того, расположено ли UE в смежном положении, может также иметь другие границы субкадра.
iii) В качестве третьего способа принятия решения о времени передачи (Тх) RS субкадра время передачи RS субкадра может также определяться между границей субкадра UL и границей субкадра DL.
Например, время передачи RS субкадра может устанавливаться равным конкретному времени, более раннему, чем граница субкадра DL, на предварительно определенное время, соответствующее половине текущего значения ТА, либо может также устанавливаться равным конкретному времени, отстоящему от соответствующего времени на предварительно определенное время.
Фиг. 16 представляет собой концептуальную диаграмму, иллюстрирующую способ определения времени передачи (Тх) опорного сигнала (RS) субкадра в момент времени между границей субкадра восходящей линии связи и границей субкадра нисходящей линии связи в соответствии с третьим вариантом осуществления настоящего изобретения. В частности, как видно из фиг. 16, половина ТА приблизительно идентична задержке распространения между eNB и UE, поэтому время, более раннее, чем время приема границы субкадра DL, на предварительно определенное время, соответствующее половине ТА, идентично времени передачи, при котором eNB передает границу субкадра DL, и, кроме того, идентично времени приема, при котором eNB принимает границу субкадра UL.
Следовательно, конкретное время, более раннее, чем время приема границы субкадра DL, на предварительно определенное время, соответствующее половине ТА, приблизительно идентично во всех UE, принадлежащих одной и той же соте. В результате этого, несмотря на то, что любое UE передает RS субкадра, RS субкадра предается в приблизительно одинаковые моменты времени, поэтому общая граница субкадра D2D остается неизменной даже в тех случаях, когда несколько UE в соответствии с другим вариантом передают RS субкадра.
Чтобы выбрать один способ из числа вышеуказанных способов принятия решения о передаче RS субкадра, eNB может информировать UE о конкретном сигнале, указывающем на то, какой способ принятия решения будет использоваться для передачи RS субкадра. В соответствии с другим вариантом, соответствующие способы имеют преимущества с точки зрения различных дуплексных методов, поэтому соответствующий способ может выбираться в соответствии с тем, какая дуплексная схема используется ресурсами для передачи RS субкадра. Например, система TDD может использовать способ (i) принятия решения о передаче RS субкадра на основе границы субкадра DL, а система FDD может использовать другой способ (ii) принятия решения о передаче RS субкадра на основе границы субкадра UL.
В соответствии с другим вариантом, RS субкадра, имеющие различные атрибуты, могут также передаваться в ответ на множество RS субкадра. Например, в случае использования сигнала обнаружения, который одновременно передается/принимается несколькими UE в ответ на синхронизацию, все UE, участвующие в передаче, должны иметь единое время, UE может передавать RS в соответствии либо со способом (iii) для определения времени передачи RS субкадра между границей субкадра UL и границей субкадра DL, либо с другим способом (i) для определения времени передачи RS субкадра, когда имеется незначительная разность в задержке распространения между UE, и может передавать и принимать сигнал обнаружения на основе результата передачи RS. Напротив, при обмене пользовательскими данными между отдельными UE способ (ii) для определения времени передачи RS субкадра может использоваться в соответствии с состоянием каждого UE.
В этом случае необходимо, чтобы UE выявляли, какой из способов принятия решения о времени используется для передачи RS субкадра, поэтому RS субкадра, предаваемые в соответствии с различными схемами (т.е. RS субкадра для синхронизации различных типов сигналов D2D) могут различаться по сигнатуре Тх, положениям передаваемых временных/частотных областей и т.п. Например, сигнатура конкретного RS субкадра может предварительно определяться таким образом, что сигнатура может использоваться только для RS субкадра для сигнала обнаружения или может использоваться только для RS субкадра для связи D2D.
Четвертый вариант осуществления
Между тем, если UE, расположенное в зоне обслуживания (т.е. внутреннее UE зоны обслуживания) принимает индикаторное сообщение передачи RS субкадра от eNB, работа UE (в частности, конфликт с передачей UL в направлении eNB) может осуществляться в соответствующих ресурсах.
В этом случае передача RS субкадра может иметь приоритет. То есть, когда UE, выполненное с возможностью передачи RS субкадра в конкретно субкадре, пытается передавать сигнал в eNB в том же субкадре, передаваемый в eNB сигнал может быть исключен, а затем может быть передан RS субкадра.
В соответствии с другим вариантом, передача сигнала в eNB также может иметь приоритет. То есть, когда UE, выполненное с возможностью передачи RS субкадра в конкретно субкадре, пытается передавать сигнал в eNB в том же субкадре в качестве конкретного субкадра, передача RS может быть исключена, а затем может осуществляться передача сигнала в eNB.
Вышеуказанные способы могут использоваться различными путями в соответствии со способом указания передачи RS субкадра или в соответствии с категориями сигналов, передаваемых в eNB. Например, при предположении, что передаваемый на eNB сигнал представляет собой любой из полустатически передаваемого сигнала полупостоянного планирования (SPS), периодического отчета CSI и сигнала запроса планирования, независимо передаваемого UE, eNB может не принять немедленного решения о передаче соответствующего времени, поэтому RS субкадра может иметь приоритет. В частности, вышеуказанный случай может более эффективно использоваться для случая, в котором eNB прямо указывает RS субкадра.
Еще в одном примере при предположении, что передаваемый на eNB сигнал представляет собой PDSCH, указанный сигналом физического уровня, таким как PDCCH или EPDCCH (усовершенствованный PDCCH), HARQ-ACK, относящийся к основанному на SPS PDSCH, разрешение восходящей линии связи или сигнал передачи PUSCH на основе PHICH, передача сигнала в eNB может иметь приоритет. После приема индикаторного сообщения, которое указывает UE передавать на основе соревнований RS субкадра, т.е. после приема косвенного индикаторного сообщения, указывающего на передачу RS субкадра, RS субкадра может также передаваться в другое время, поэтому передача сигнала в eNB при необходимости всегда может иметь приоритет.
Как описано выше, RS субкадра, переданный прямым индикаторным сообщением eNB, можно разбить на RS субкадра, автономно определяемый UE без приема индикаторного сообщения от eNB, и атрибуты сигнатуры. Например, поднабор выбирается из числа всех наборов сигнатуры, которая может использоваться в качестве сигнатуры RS субкадра, при этом может быть задана передача сигнатуры, соответствующей соответствующему поднабору, с помощью UE только в тех случаях, когда имеются прямые/косвенные индикаторные сообщения eNB. Разумеется, может использоваться дополнительный индикатор, при этом может оказаться возможным задавать дополнительный индикатор для различения RS субкадра, переданного без использования индикаторного сообщения eNB, и субкадра, переданного с помощью индикаторного сообщения eNB. В результате этого, если конкретное UE принимает конкретный RS субкадра, может быть выявлено, передан ли RS с помощью индикаторного сообщения eNB, т.е. может быть выявлено, передан ли RS с помощью UE, расположенного в зоне действия eNB. На основе вышеуказанной информации более высокий приоритет может быть успешно назначен передаче RS UE, расположенного в зоне действия eNB.
Кроме того, когда формируется сигнал проверки достоверности, описанный в первом варианте осуществления, все или некоторые атрибуты RS субкадра, принятого UE, могут использоваться повторно. В результате этого, если RS субкадра передается индикаторным сообщением eNB, то обстоятельство, что сигнал проверки достоверности передан индикаторным сообщением eNB, может быть передано другим UE. В связи с этим, UE D2D, которое приняло RS субкадра, переданный с помощью сигнала проверки достоверности или индикаторного сообщения eNB, может повторно передавать соответствующий RS субкадра без использования дополнительного соревнования UE-UE в конкретное время, либо может повторно передавать соответствующий RS субкадра одновременно при наличии приоритета в соревновании. Граничная информация о субкадре, используемом в eNB, может распространяться во внешние UE зоны обслуживания.
Фиг. 17 представляет собой концептуальную диаграмму, иллюстрирующую способ распространения граничной информации о субкадре, используемом в eNB, на UE, расположенные вне зоны обслуживания, в соответствии с четвертым вариантом осуществления настоящего изобретения.
В соответствии с фиг. 17, eNB может выдавать в UE1 команду на передачу RS субкадра, при этом UE1 может передавать RS субкадра в соответствии с индикаторным сообщением eNB. UE2 может передавать RS субкадра, имеющий наивысший приоритет, из числа RS субкадра, принимаемого от UE1, и других RS субкадра, либо может передавать сигнал проверки достоверности в ответ на передачу RS субкадра с наивысшим приоритетом.
Несмотря на то, что UE3 не осуществляет непосредственно связь D2D с внутренним UE зоны обслуживания, с помощью вышеописанного процесса распространения UE3 может быть синхронизировано с субкадром eNB, поэтому UE1, расположенное в зоне обслуживания, и UE2, выполненное с возможностью осуществления связи D2D, могут оказаться полезными для операции D2D UE2.
Кроме того, когда первое внешнее UE зоны обслуживания осуществляет связь D2D в ответ на RS субкадра, передаваемый либо внешним UE, либо вторым внешним UE зоны обслуживания, предпринимается попытка обнаружения RS субкадра, передаваемого внутренним UE зоны обслуживания. Если обнаружен RS субкадра, первое внешнее UE может сработать в ответ на RS субкадра, передаваемый внутренним UE зоны обслуживания. Например, внешнее UE зоны обслуживания после обнаружения RS субкадра, передаваемого внутренним UE зоны обслуживания, может реконфигурировать момент времени субкадра в ответ на RS, передаваемый внутренним UE зоны обслуживания, в течение предварительно определенного времени. Если соответствующее UE передает RS субкадра, RS может быть передан в ответ на реконфигурированное время субкадра, либо передача RS соответствующего UE может быть прекращена.
Кроме того, при предположении, что действительный период имеется в RS субкадра, переданном внешним UE зоны обслуживания, и используется в качестве опорного значения традиционной связи D2D, синхронизация с RS субкадра, передаваемым внешним UE зоны обслуживания, поддерживается до тех пор, пока не истечет соответствующий действительный период. Однако после того, как истекает действительный период, необходима синхронизация с временем начала RS субкадра, передаваемым внутренним UE зоны обслуживания. В соответствии с другим вариантом, ожидается, что в течение предварительно определенного времени внутренним UE зоны обслуживания будет передаваться еще один RS субкадра, при этом в течение соответствующего предварительно определенного времени не будет предприниматься попытка передачи RS субкадра, поэтому приоритет может быть назначен внутреннему UE зоны обслуживания. В этом случае внешнее UE зоны обслуживания, которое не приняло RS субкадра в течение предварительно определенного времени, может пытаться передать RS субкадра в соответствии с вышеописанными стохастическими способами.
Между тем, в соответствии со схемой передачи RS субкадра на основе соревнования UE-UE приоритет может назначаться передаче RS иначе в соответствии с категориями UE D2D. Например, UE для связи D2D можно разбить на некоторые категории в соответствии с различными видами информации, например, максимальной мощностью Тх сигнала D2D, информацией о том, возможна ли групповая связь (т.е., может ли UE D2D одновременно осуществлять связь с множеством UE D2D) и информацией о том, могут ли управляться другие линии связи D2D. В частности, управление другой линией связи D2D может означать управление выделением ресурса в отношении смежной линии связи D2D, в которой не содержится соответствующее UE. В этом случае приоритет может иначе назначаться передаче RS субкадра в соответствии с категориями UE D2D. Более высокий приоритет может назначаться категориям UE, имеющим более высокое назначение. Например, более высокий приоритет может назначаться UE, имеющему более высокую максимальную мощность Тх, UE, обладающему способностью групповой связи, или UE, имеющему функцию управления другой линией связи D2D, поэтому соответствующие UE могут устанавливать опорное значение субкадра при более высокой вероятности, а другие UE могут функционировать в ответ на установленное опорное значение.
Кроме того, хотя UE получает границу субкадра в соответствии с вышеуказанной схемой, новая граница субкадра должна определяться в ответ на перемещение UE D2D, поэтому невозможно, чтобы однажды полученная синхронизация была действительной в течение неопределенного времени. Следовательно, действительный период устанавливается в однажды выбранной границе субкадра. После того, как этот действующий период истек, граница субкадра может устанавливаться повторно после завершения процесса передачи RS субкадра. В этом случае в предположении, что для каждого времени реконфигурирования границы субкадра осуществляется соревнование UE-UE, из-за конфликта RS UE-UE может возникнуть ненужная временная задержка.
Чтобы решить вышеописанную проблему, приоритет можно назначать UE, передавшему действующий RS субкадра, при определении традиционной границы субкадра. Способ назначения такого приоритета может быть идентичным способу назначения приоритета внутреннему UE зоны обслуживания eNB для использования в вышеуказанном способе назначения приоритета передаче RS. Кроме того, UE, передавшему действующий RS субкадра, при определении традиционной границы субкадра приоритет может назначаться передачей сигнала проверки достоверности независимо от передачи других RS субкадра.
UE, в котором активируется новая линия связи D2D, может поддерживать ту же границу субкадра, что и традиционные периферийные UE, осуществляющие связь D2D. С этой целью UE, в котором активирована новая линия связи D2D, не передает RS субкадра в течение предварительно определенного времени, а может определять наличие или отсутствие RS субкадра, передаваемых от традиционных UE D2D.
В этом случае предварительно определенное время, в которое RS субкадра не передается, устанавливается равным однажды определенному действительному периоду границы субкадра. Если UE, осуществляющее традиционную связь D2D, расположена в смежном положении, RS субкадра может передаваться, по меньшей мере, однократно в течение предварительно определенного времени. Если UE, в котором активирована новая линия связи D2D, не обнаруживает действительный RS субкадра или сигнал проверки достоверности в течение предварительно определенного времени, UE может немедленно попытаться передать RS субкадра.
Пятый вариант осуществления
Информация относительно различных параметров, используемых при фактической связи D2D, может содержаться в RS субкадра. В результате этого UE, принявшие один и тот же RS субкадра, могут осуществлять связь D2D с использованием одних и тех же параметров. В RS субкадра могут содержаться следующие параметры.
(1) Информация о положении и размере частотной области, в которой будет осуществляться связь D2D.
- Связь D2D может обеспечиваться в области, соответствующей вышеуказанной информации о размере, на основе частотной области, принявшей RS субкадра.
(2) Информация о мощности передачи (Тх), используемая для связи D2D, например, максимальная мощность Тх или различные параметры, появляющиеся в уравнении управления мощностью Тх.
- Если традиционная схема управления мощностью Тх PUSCH, появившаяся в нижеследующем уравнении 1, используется между eNB и UE без изменений, параметры (PO_PUSCH,C(j), αc(j)) описываются нижеследующим уравнением 1.
Уравнение 1

В Уравнении 1 единицами PO_PUSCH,C(j) являются дБм, при этом PO_PUSCH,C(j) означает мощность Тх PUSCH несущей (с) в i-е время. В частности, PCMAX,C(i) - мощность Тх UE несущей (с), PLc - расчетное значение потерь на трассе сигнала нисходящей линии связи, αc(j) и 
(3) Информация о длине Циклического префикса (СР), используемого для связи D2D.
- Информация о длине (3) может указывать на то, будет ли использоваться нормальный СР или усовершенствованный СР, либо может указывать на то, будет ли использоваться СР новой длины, при условии, что СР новой длины дополнительно вводится для связи D2D.
(4) Длина единичного интервала времени одной передачи D2D.
- Такая информация о длине (4) может указывать, передается ли одиночный сигнал Тх D2D с использованием одного субкадра в качестве опорного синхронизирующего сигнала, может указывать, передается ли одиночный сигнал Тх D2D с использованием нескольких связанных субкадров в качестве единого опорного синхронизирующего сигнала, либо может указывать число связанных субкадров при связывании нескольких субкадров.
(5) Параметры соревнования для передачи сигнала D2D.
- Если UE передают сигнал D2D на основе соревнования, параметры соревнования представляют собой параметры, используемые для соревнования. Например, параметры соревнования могут включать в себя значение вероятности передачи (Тх), используемое в тех случаях, когда каждое UE стохастически передает сигнал D2D в каждый момент времени Тх. Еще в одном примере каждое UE генерирует/сохраняет случайные числа в предварительно определенной области и вычитает из случайных чисел предварительно определенное значение, когда канал является незанятым. Если результат вычитания меньше или равен предварительно определенному опорному значению, параметры соревнования могут включать в себя информацию, относящуюся к области генерирования случайных чисел, используемых при выполнении передачи.
В одном из типичных примеров способа включения такой информации в RS субкадра, если генерируется сигнатура RS субкадра, значения параметра могут использоваться в качестве переменных. В соответствии с другим вариантом, дополнительный канал для передачи вышеуказанной информации с использованием постоянных частотных/временных областей, получаемых по соответствующей сигнатуре, может формироваться отдельно от сигнатуры RS субкадра. Например, вышеуказанная информация может передаваться только в течение предварительно определенного времени после передачи сигнатуры, при этом вышеуказанная информация может передаваться по каналу, передаваемому с использованием той же частотной области, что и сигнатура.
Вышеуказанная информация может устанавливаться равной конкретному значению, содержащемуся в индикации eNB, когда соответствующее UE передает канал, имеющий RS субкадра или вышеуказанную информацию после приема индикаторного сообщения eNB. Напротив, если канал, имеющий RS субкадра или вышеуказанную информацию, передается без приема индикаторного сообщения eNB вне зоны обслуживания eNB или без приема RS субкадра, инициируемого индикацией eNB вне зоны обслуживания eNB, вышеуказанная информация может устанавливаться равной некоторой задаваемой по умолчанию величине каждого UE. То есть UE может иметь задаваемую по умолчанию величину, соответствующую различным видам информации во время передачи RS субкадра. Если RS субкадра передается в соответствии с индикацией eNB, эта задаваемая по умолчанию величина может быть изменена на величину, принимаемую от eNB.
Фиг. 18 представляет собой блок-схему примера устройства связи в соответствии с одним из вариантов осуществления настоящего изобретения.
В соответствии с фиг. 18, устройство 1800 связи может содержать процессор 1810, память 1820, RF-модуль 1830, модуль 1840 отображения и модуль 1850 пользовательского интерфейса.
Поскольку для удобства описания изображено устройство 1800 связи, вышеупомянутый модуль (модули) может быть частично исключен. Устройство 1800 связи может дополнительно содержать необходимый модуль (модули). Кроме того, вышеупомянутый модуль устройства 1800 связи может быть разделен на составные модули. Процессор 1810 выполнен с возможностью выполнения действия в соответствии с вариантами осуществления настоящего изобретения, иллюстрируемыми со ссылкой на чертежи. В частности, детальное действие процессора 1810 может относиться к предшествующему описанию, приведенному со ссылкой на фиг. 1-17.
Память 1820 соединена с процессором 1810 и хранит операционную систему, приложения, программные коды, данные и т.п. RF-модуль 1830 соединен с процессором 1810 и при этом выполняет функцию преобразования сигнала основной полосы в радиосигнал или функцию преобразования радиосигнала в сигнал основной полосы. С этой целью RF-модуль 1830 выполняет аналоговое преобразование, усиление, фильтрацию и преобразование с повышением частоты либо выполняет процессы, обратные по отношению к вышеописанным процессам. Модуль 1840 отображения соединен с процессором 1810 и отображает различные виды информации. При этом модуль 1840 отображения может быть реализован с использованием такого хорошо известного компонента, как LCD (жидкокристаллический дисплей), LED (светодиодный дисплей), OLED (дисплей на органических светодиодах) и т.п., благодаря которому настоящее изобретение может являться неограничительным. Модуль 1850 пользовательского интерфейса соединен с процессором 1810 и может быть выполнен путем комбинирования с таким хорошо известным пользовательским интерфейсом, как клавиатура, сенсорный экран и т.п.
Вышеописанные варианты осуществления соответствуют комбинациям элементов и признаков настоящего изобретения в вышеописанных формах. При этом соответствующие элементы или признаки могут рассматриваться как выборочные, кроме тех случаев, когда они указаны в явной форме. Каждый из элементов или признаков может быть реализован в форме, не комбинируемой с другими элементами или признаками. Кроме того, можно реализовать вариант осуществления настоящего изобретения путем частичного комбинирования элементов и/или признаков друг с другом. Последовательность операций, объясняемых для каждого варианта осуществления настоящего изобретения, может быть изменена. Некоторые конфигурации или признаки одного варианта осуществления могут быть включены в другой вариант осуществления или могут быть заменены соответствующими конфигурациями или признаками другого варианта осуществления. При этом должно быть понятно, что вариант осуществления формируется путем комбинирования пунктов формулы изобретения, не имеющих отношения к точному цитированию в прилагаемой формуле изобретения в совокупности, либо он может быть введен в качестве новых пунктов формулы изобретения путем внесения изменений после регистрации заявки.
Варианты осуществления настоящего изобретения могут быть реализованы с помощью различных средств. Например, варианты осуществления настоящего изобретения могут быть реализованы с помощью аппаратных средств, микропрограммных средств, программных средств и/или любой их комбинации. При реализации с помощью аппаратных средств способ в соответствии с каждым вариантом осуществления настоящего изобретения может быть реализован с помощью, по меньшей мере, одного, выбираемого из группы, состоящей из ASIC (специализированных интегральных схем), DSP (цифровых сигнальных процессоров), PLD (программируемых логических устройств), FPGA (программируемых пользователем вентильных матриц), процессора, контроллера, микроконтроллера, микропроцессора и т.п.
В случае реализации с помощью микропрограммных средств или программных средств способ в соответствии с каждым вариантом осуществления настоящего изобретения может быть реализован с помощью модулей, процедур и/или функций для выполнения вышеописанных функций или операций. Программный код хранится в блоке памяти и при этом управляется процессором. Блок памяти предусматривается внутри или снаружи процессора для обмена данными с процессором посредством различных широко известных средств.
Несмотря на то, что настоящее изобретение описано и иллюстрировано в настоящем документе применительно к его предпочтительным вариантам осуществления, специалистам будет понятно, что в нем могут быть выполнены различные модификации и изменения в пределах сущности и объема изобретения. Таким образом, предполагается, что настоящее изобретение охватывает модификации и изменения данного изобретения, находящиеся в пределах объема прилагаемой формулы изобретения и ее эквивалентов.
Промышленная применимость
Как очевидно из вышеприведенного описания, несмотря на то, что способ и устройство для получения синхронизации для прямой связи D2D между пользовательским оборудованием (UE), расположенным внутри зоны обслуживания, и пользовательским оборудованием (UE), расположенной снаружи зоны обслуживания, в системе беспроводной связи описаны на основе применения к LTE 3GPP, изобретательский замысел настоящего изобретения применим не только к LTE 3GPP, но и к другим системам беспроводной связи.
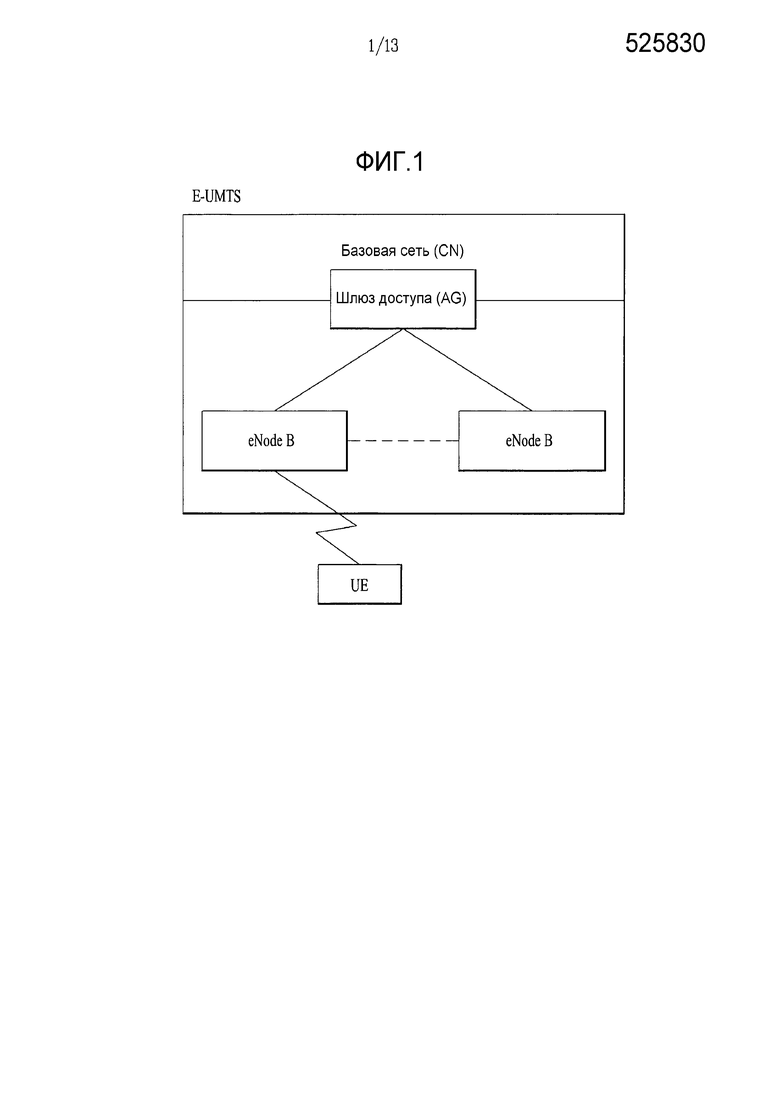

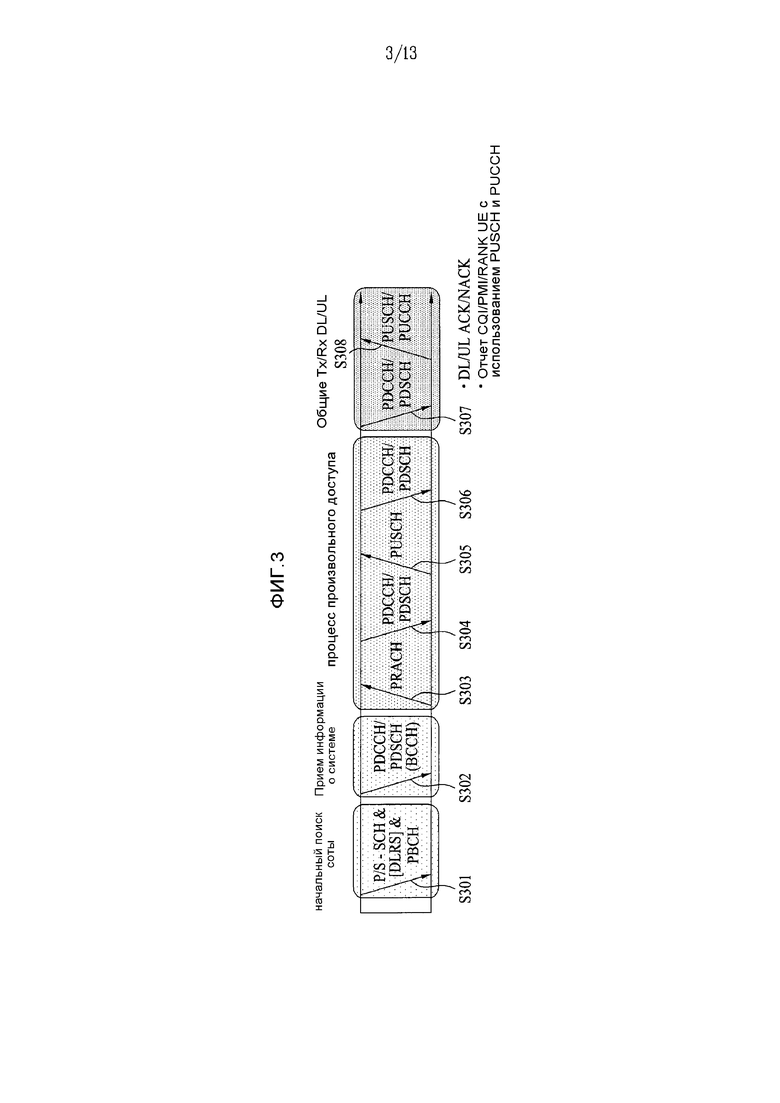

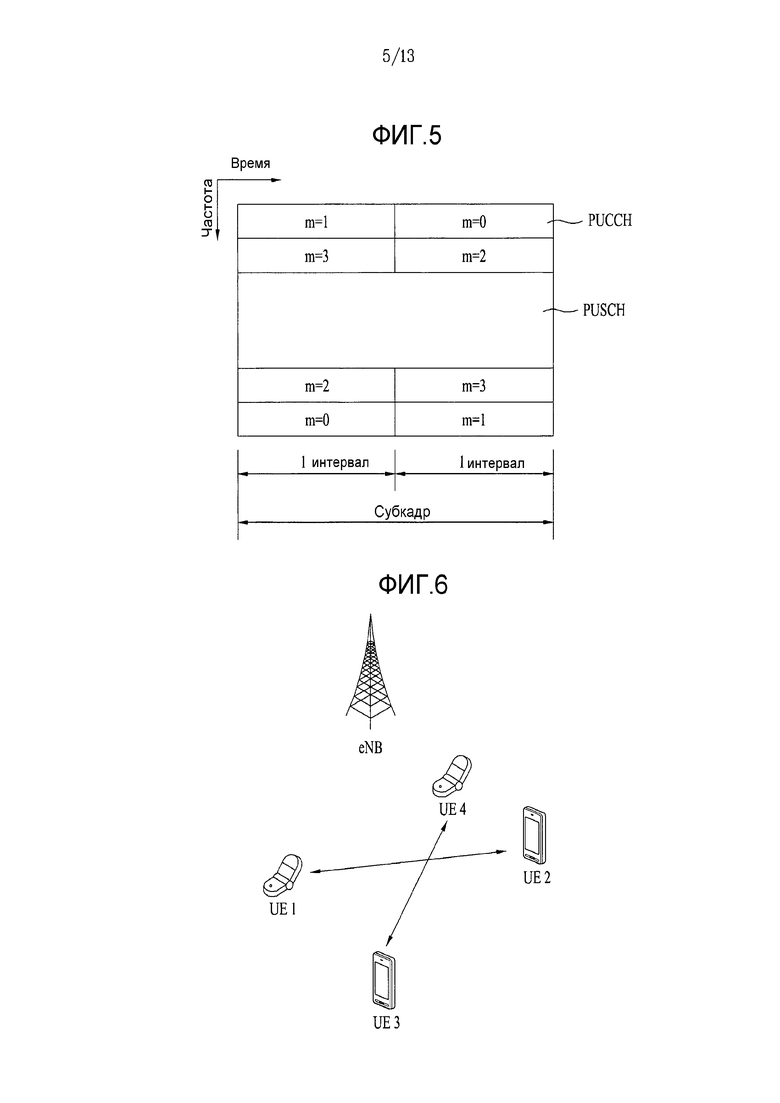
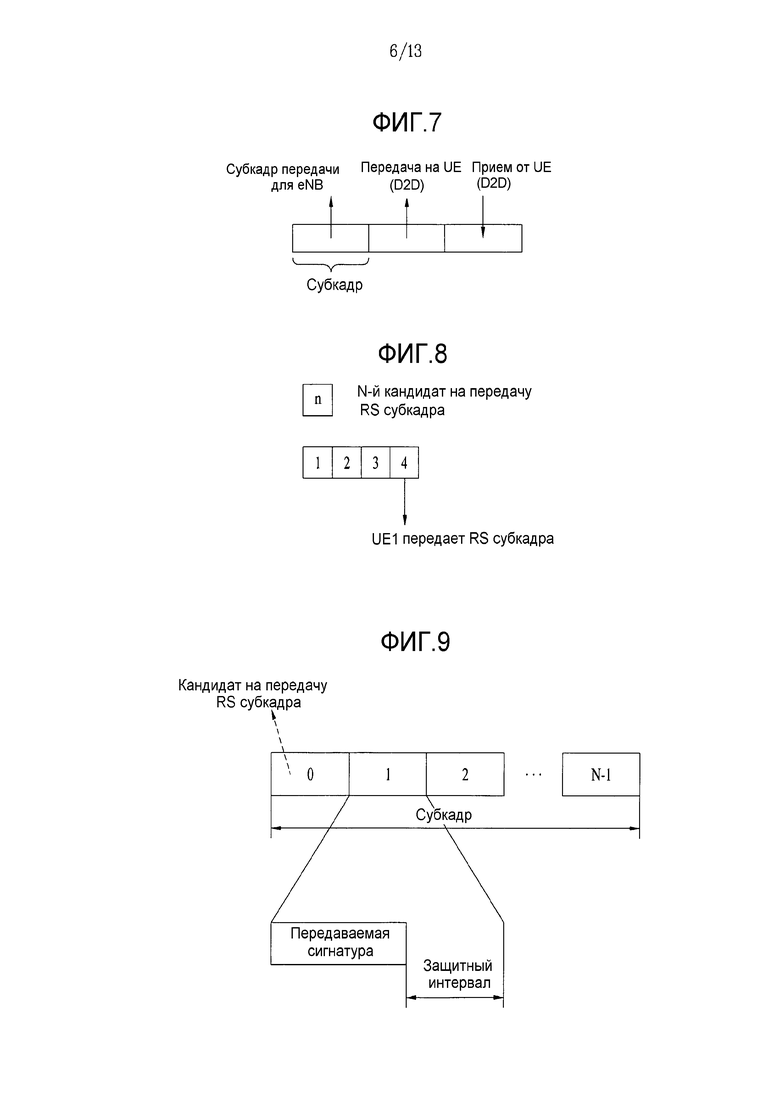
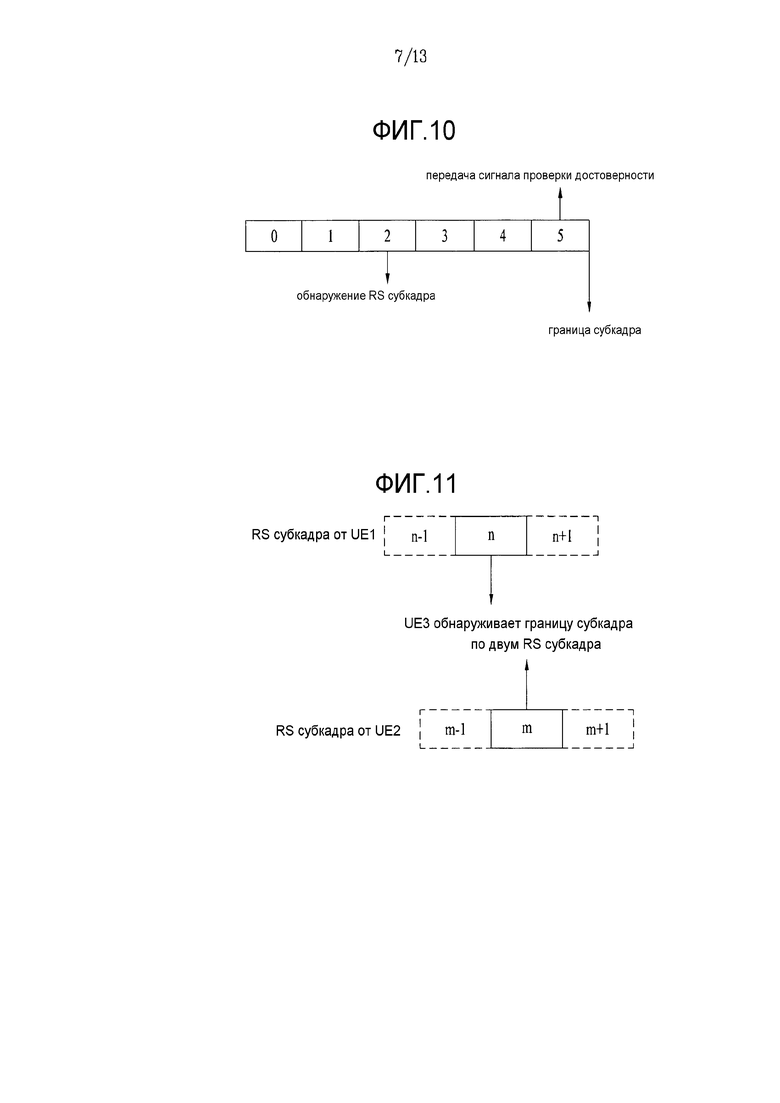





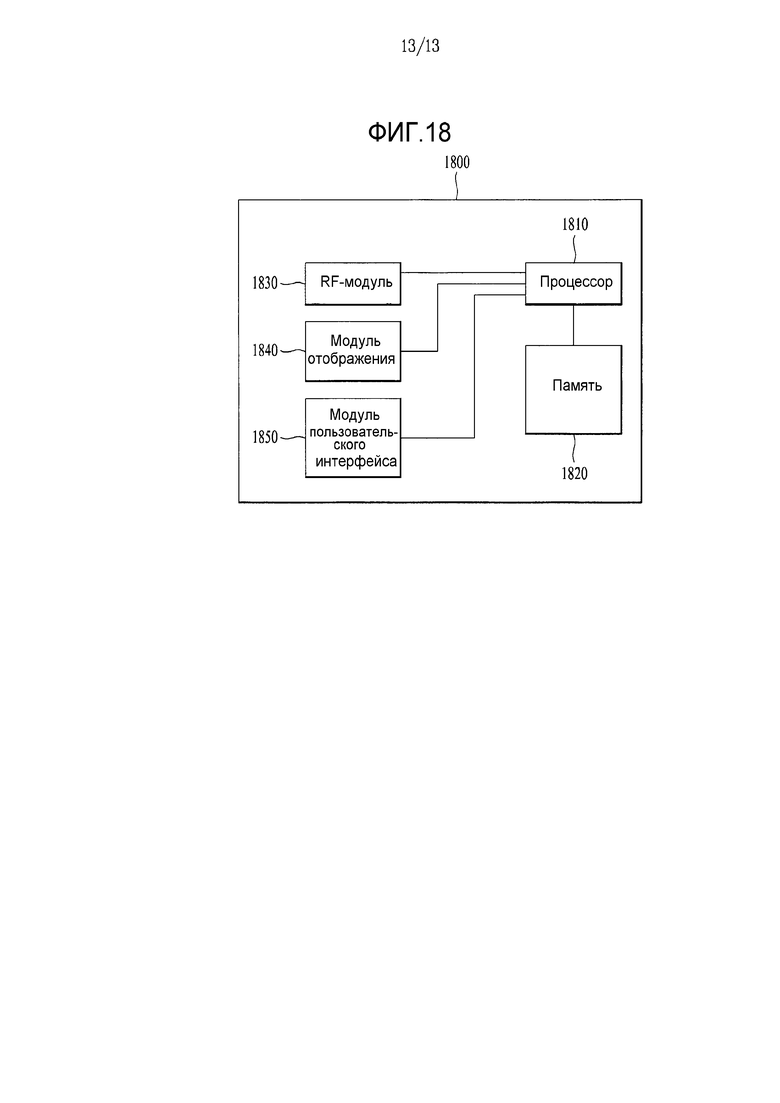
Изобретение относится к системе беспроводной связи и предназначено для более эффективного получения синхронизации для прямой связи устройство-устройство, раскрывается способ осуществления связи устройство-устройство между пользовательским оборудованием, расположенным в зоне обслуживания, и пользовательским оборудованием, расположенным вне зоны обслуживания. В частности, способ включает в себя этапы разделения конкретного единичного интервала времени для связи устройство-устройство на множество потенциальных периодов и передачи опорного сигнала для получения синхронизации на второе пользовательское оборудование из одного периода из числа потенциальных периодов, если генерируемое случайное число больше или равно критическому значению, соответствующему внутренней области зоны обслуживания, причем критическое значение, соответствующее внутренней области зоны обслуживания, меньше критического значения, соответствующего внешней области зоны обслуживания. 2 н. и 8 з.п. ф-лы, 18 ил.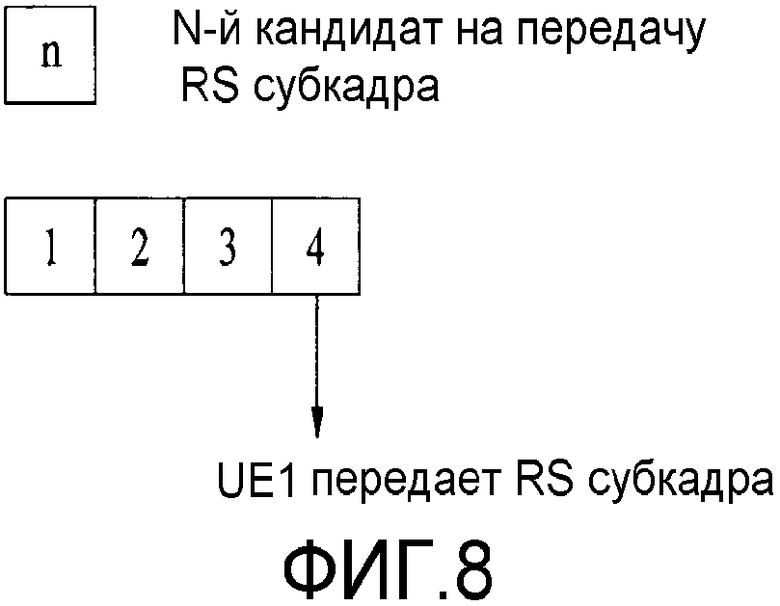
1. Способ приема сигнала синхронизации для линии связи устройство-устройство (D2D) в пользовательском оборудовании (UE) в системе беспроводной связи, причем способ включает в себя:
прием сигнала синхронизации от другого UE и
получение синхронизации с использованием упомянутого сигнала синхронизации,
причем упомянутый сигнал синхронизации включает в себя сигнатуру, принадлежащую одной из первой группы для области внутри зоны обслуживания базовой станции и второй группы для области вне зоны обслуживания базовой станции.
2. Способ по п. 1, в котором приоритеты сигнатур, принадлежащих первой группе, выше, чем приоритеты сигнатур, принадлежащих второй группе.
3. Способ по п. 1, в котором, если сигнал синхронизации передается по команде базовой станции, то этот сигнал синхронизации содержит сигнатуру, принадлежащую первой группе.
4. Способ по п. 1, в котором, если сигнал синхронизации передается без команды базовой станции, то этот сигнал синхронизации содержит сигнатуру, принадлежащую второй группе.
5. Способ по п. 1, в котором, если сигнал синхронизации передается от упомянутого другого UE по команде базовой станции, то этот сигнал синхронизации передается заранее за предварительно определенное время от границы субкадра нисходящей линии связи.
6. Пользовательское оборудование (UE) в системе беспроводной связи, причем UE содержит:
радиочастотный (RF) модуль для приема сигнала синхронизации для линии связи устройство-устройство (D2D) от другого UE и
процессор для получения синхронизации с использованием упомянутого сигнала синхронизации,
причем упомянутый сигнал синхронизации включает в себя сигнатуру, принадлежащую одной из первой группы для области внутри зоны обслуживания базовой станции и второй группы для области вне зоны обслуживания базовой станции.
7. UE по п. 6, в котором приоритеты сигнатур, принадлежащих первой группе, выше, чем приоритеты сигнатур, принадлежащих второй группе.
8. UE по п. 6, в котором, если сигнал синхронизации передается по команде базовой станции, то этот сигнал синхронизации содержит сигнатуру, принадлежащую первой группе.
9. UE по п. 6, в котором, если сигнал синхронизации передается без команды базовой станции, то этот сигнал синхронизации содержит сигнатуру, принадлежащую второй группе.
10. UE по п. 6, в котором, если сигнал синхронизации передается от упомянутого другого UE по команде базовой станции, то этот сигнал синхронизации передается заранее за предварительно определенное время от границы субкадра нисходящей линии связи.
| KR 20120129815 A, 28.11.2012 | |||
| KR 20120073147 A, 04.07.2012 | |||
| JP 2006222489 A, 24.08.2006 | |||
| Приспособление для суммирования отрезков прямых линий | 1923 |
|
SU2010A1 |

