Изобретение относится к водолазной технике, а именно к системе вывески и дифферентовки подводных грузовых контейнеров, выпускаемых из торпедных аппаратов (ТА) ПЛ и предназначенных для транспортировки грузов водолазами с использованием буксировщиков водолазов.
Если грузовой контейнер плохо вывешен или неудифферентован, то при его буксировке под водой возникают силы, отклоняющие контейнер вниз или вверх и система «водолаз-буксировщик-контейнер» движется неустойчиво, неровно, плохо удерживает глубину и снижает скорость буксировки.
Известны аналоги - отечественные подводные грузовые контейнеры КТ-2 (Зарембовский В.Л., Колесников Ю.И. // «Морской СПЕЦНАЗ», Изд. «Галлея Принт», г. Санкт-Петербург, 2001 г.) и «Ринадон-2», имеющие систему вывески и дифферентовки.
Вывеска и дифферентовка контейнеров КТ-2 выполняются водолазами вручную у пирса. Водолазы укладывают свинцовые грузы в специальные ниши в носовой и кормовой части контейнера, пока он весь не скроется под водой. Затем осуществляется дифферентовка контейнера путем перекладки грузов из носовой оконечности в кормовую или обратно, пока контейнер не расположится под водой горизонтально. Система проста, но, как показала практика, требует много времени. Кроме того, при изменении плотности воды (а она различна в различных районах морей и океанов из-за разной температуры и солености) вывеска контейнера в районе выпуска из ПЛ нарушается.
Подводный грузовой контейнер «Ринадон-2» (прототип изобретения), производства ПО «Пролетарский завод» (выпускался до 1985 г.) имел систему автоматической вывески и дифферентовки. Он был выполнен в габаритах контейнера КТ-2, но состоял из двух грузовых отсеков - носового и кормового. Между ними находился прочный приборный отсек. В приборном отсеке был размещен блок автоматики, уравнительная цистерна, блок питания, помпа для приема и откачки воды, баллон ВВД. Две дифферентные цистерны были размещены по бокам приборного отсека.
Контейнер «Ринадон-2» имел ряд недостатков, а именно: из-за наличия весьма объемного приборного отсека уменьшился объем грузовых отсеков и их длина; наличие двух коротких грузовых отсеков затрудняло эксплуатацию контейнера; необходимо было загружать контейнер через носовую и кормовую крышки, некоторые длинные грузы вообще не помещались.
Принцип работы системы вывески контейнера «Ринадон-2» был основан на автоматической стабилизации контейнера на глубине выпуска из трубы торпедного аппарата ПЛ. После включения водолазами питания системы автоматики, в нее поступали данные о глубине погружения контейнера от датчика глубины. Глубина выпуска запоминалась и в дальнейшем с ней сравнивалась глубина погружения контейнера через интервал времени t, а также учитывалась скорость погружения или всплытия. В зависимости от этого включалась помпа на откачку или прием воды в уравнительную и дифферентные цистерны. Датчик дифферента вырабатывал сигнал, позволяющий определить, какую цистерну (носовую или кормовую) заполнять водой, а какую осушать. Однако близкое расположение дифферентных цистерн к центру тяжести контейнера (к приборному отсеку) затрудняло его дифферентовку.
После ряда колебательных движений вверх и вниз с амплитудой до ±5 м контейнер стабилизировался на глубине выпуска и продолжал колебания с амплитудой ±1 м до тех пор, пока водолазы не выключали систему автоматики. Время вывески занимало от 15 до 20 мин. Остаточная (отрицательная или положительная) плавучесть контейнера составляла ±0,5 кгс.
Задачей настоящего изобретения является создание системы автоматической вывески и дифферентовки подводного грузового контейнера непосредственно в трубе торпедного аппарата ПЛ перед выпуском.
Поставленная задача решается путем установки в контейнере двух независимых систем вывески - в носовой и кормовой оконечностях. Обе системы одинаковы по своему устройству и позволяют раздельно вывешивать носовую и кормовую оконечности. При нулевой (или близкой к нулевой) вывеске носовой и кормовой оконечностей контейнера, угол дифферента контейнера будет близок к нулю. Датчиками нулевой плавучести контейнера являются микровыключатели, установленные в носовой и кормовой оконечностях и упирающиеся в нижнюю и верхнюю направляющие дорожки ТА.
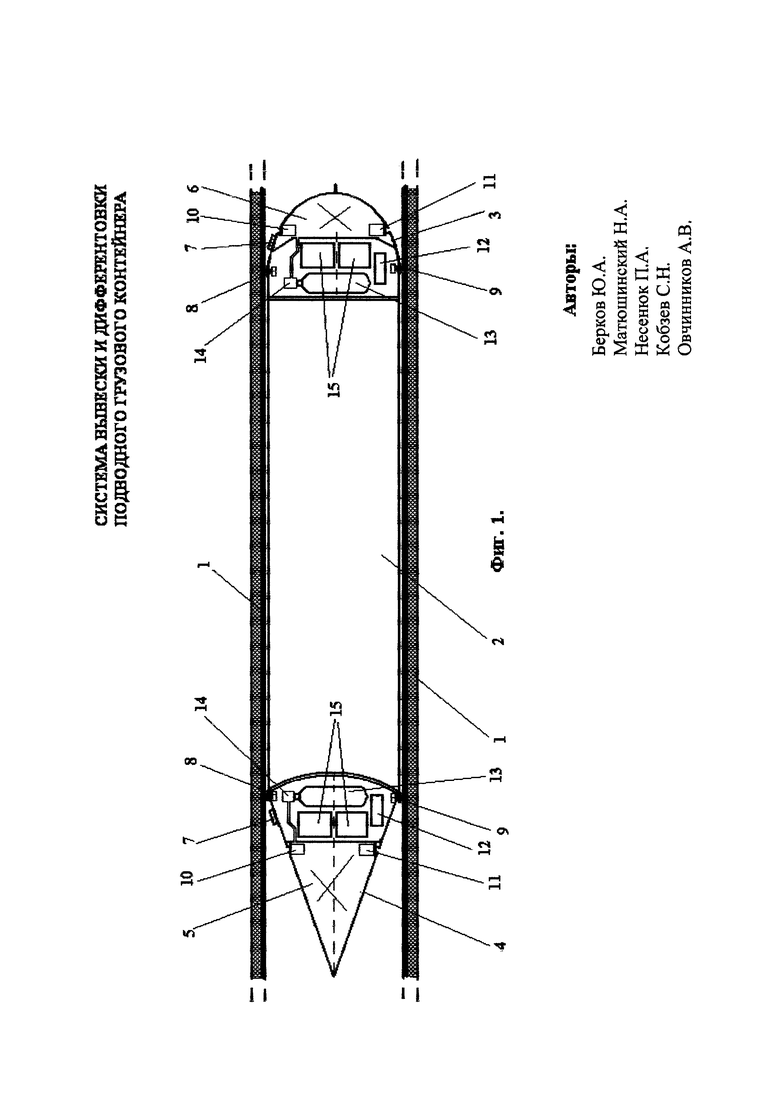
На фиг. 1 изображен грузовой контейнер с носовой и кормовой системами вывески, размещенный в ТА ПЛ.
Система вывески и дифферентовки включает в себя: корпус торпедного аппарата ПЛ, имеющий верхнюю и нижнюю направляющие дорожки - 1; грузовой контейнер - 2; переднюю крышку грузового отсека - 3; кормовой обтекатель - 4; кормовую уравнительную цистерну - 5; носовую уравнительную цистерну - 6; датчики наличия воды в ТА ПЛ - 7 (носовой и кормовой); верхние микровыключатели - 8; нижние микровыключатели - 9; электроклапана вентиляции уравнительных цистерн - 10; электроклапана кингстонов - 11; блок автоматики - 12; газовый баллон - 13; электроклапан газового баллона - 14; блок питания (аккумуляторные батареи) - 15.
Работает система автоматической вывески и дифферентовки следующим образом.
Грузовой контейнер загружается в сухой ТА из отсека ПЛ через заднюю крышку ТА с помощью устройства быстрого заряжания торпед. Контейнер имеет калибр 528 мм, а внутренний диаметр ТА - 536 мм. В результате зазор между контейнером и ТА составляет около 8 мм. Верхние микровыключатели 8 свободны и находятся в состоянии «выключено». Нижние микровыключатели 9 включены, поскольку прижаты весом контейнера к нижней направляющей дорожке ТА. Однако, пока ТА ПЛ не заполнен водой, блоки автоматики 12 контейнера отключены датчиками наличия воды 7.
После закрытия задней крышки ТА заполняется водой. Когда вода доходит до верхнего уровня ТА, датчики 7 включают блоки автоматики 12.
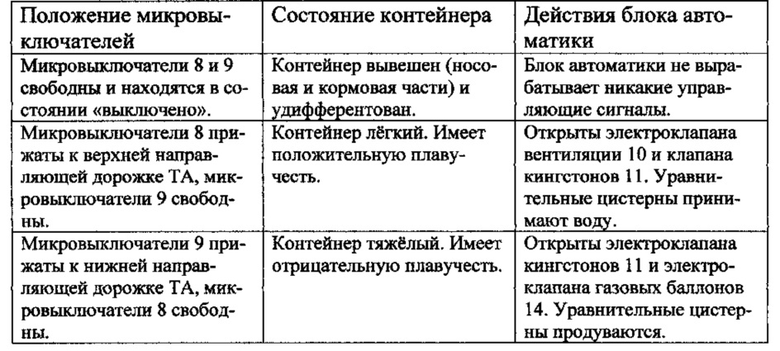
Далее, в зависимости от положения верхних 8 и нижних 9 микровыключателей, блок автоматики в носовой или кормовой оконечностях реализует алгоритм действий, приведенный в таблице:
При загрузке контейнера на берегу груз взвешивается обслуживающим персоналом. При этом масса груза не должна превышать определенной величины с точностью ±N кг, которая зависит от объема уравнительных цистерн контейнера. Если контейнер недогружен или перегружен в диапазоне 0±N кг, то система вывески автоматически вывесит и удифферентует контейнер.
После загрузки контейнера в ТА ПЛ, в период заполнения ТА водой и выравнивания давления в ТА с забортным, контейнер автоматически производит вывеску носовой и кормовой оконечностей. По окончании вывески возможна подача звукового сигнала. Теперь контейнер можно вытаскивать из ТА и буксировать в нужную точку.
При необходимости водолазы и сами могут вывесить и удифферентовать контейнер, нажимая пальцем на микровыключатели 8 или 9. Целесообразно также предусмотреть возможность отключения водолазами питания системы вывески и дифферентовки, установив в носовой оконечности контейнера выключатель.
| название | год | авторы | номер документа |
|---|---|---|---|
| ТРАНСПОРТИРОВЩИК ВОДОЛАЗОВ | 2011 |
|
RU2458816C1 |
| Система уравнительно-дифферентная для автономного необитаемого подводного аппарата с автоматическим и дистанционным управлением | 2019 |
|
RU2721638C1 |
| Система изменения плавучести и дифферента АНПА с автоматическим управлением | 2019 |
|
RU2724920C1 |
| Транспортировщик водолазов | 2017 |
|
RU2667113C1 |
| ДВИЖИТЕЛЬНО-РУЛЕВОЙ КОМПЛЕКС ТРАНСПОРТИРОВЩИКА ВОДОЛАЗОВ | 2011 |
|
RU2479464C2 |
| БЫСТРОХОДНОЕ СПАСАТЕЛЬНОЕ СУДНО | 2023 |
|
RU2798921C1 |
| ПОГРУЖАЮЩИЙСЯ КАТЕР | 2004 |
|
RU2319636C2 |
| ПОДВОДНЫЙ ТАНКЕР | 2008 |
|
RU2380274C1 |
| Транспортировщик водолазов | 2021 |
|
RU2760757C1 |
| Водолазно-спасательный глубоководный аппарат | 2020 |
|
RU2764140C1 |
Изобретение относится к водолазной технике, а именно к системе вывески и дифферентовки подводных грузовых контейнеров. Система вывески и дифферентовки подводного грузового контейнера состоит из двух одинаковых независимых систем вывески, которые установлены в носовой и кормовой оконечностях контейнера и содержат уравнительные цистерны, аккумуляторные батареи, газовые баллоны с электроклапанами, электроклапана вентиляции и электроклапана кингстонов, и блоки автоматики. При этом система содержит верхние и нижние микровыключатели, которые срабатывают при упоре в верхние или нижние направляющие дорожки ТА, или включающиеся при ручном нажатии и подающие сигнал в блок автоматики на прием или удаление воды из уравнительных цистерн. Достигается устранение дифферента контейнера. 1 ил., 1 табл.
Система вывески и дифферентовки подводного грузового контейнера, состоящая из двух одинаковых независимых систем вывески, установленных в носовой и кормовой оконечностях контейнера, содержащих уравнительные цистерны, аккумуляторные батареи, газовые баллоны с электроклапанами, электроклапана вентиляции и электроклапана кингстонов, блоки автоматики, отличающаяся тем, что содержит верхние и нижние микровыключатели, срабатывающие при упоре в верхние или нижние направляющие дорожки ТА, или включающиеся при ручном нажатии и подающие сигнал в блок автоматики на прием или удаление воды из уравнительных цистерн.
| RU 2003118488 A, 10.12.2004 | |||
| ТРАНСПОРТИРОВЩИК ВОДОЛАЗОВ | 2011 |
|
RU2458816C1 |
| ПРИСПОСОБЛЕНИЕ ДЛЯ ПРИКРЕПЛЕНИЯ СЕКТОРОВ НАПРАВЛЯЮЩЕГО АППАРАТА, НАПРАВЛЯЮЩИЙ АППАРАТ И ТУРБОМАШИНА | 2003 |
|
RU2311539C2 |
| Способ защиты переносных электрических установок от опасностей, связанных с заземлением одной из фаз | 1924 |
|
SU2014A1 |

