Изобретение относится к области подводного судостроения, в частности к системам управления плавучестью и дифферентом подводных устройств. Уравнительно-дифферентная система (УДС) автономного необитаемого подводного аппарата (АНПА) содержит две независимые, размещенные в оконечностях уравнительно-дифферентные цистерны для приема забортной воды, высоконапорные насосы, трубопроводы с запорной арматурой, блок автоматики с дистанционным управлением. Уравнительно-дифферентные цистерны выполнены эластичными из полимерных материалов.
Известна дифферентная система подводного технического средства, включающая дифферентные цистерны, расположенные в оконечностях подводного технического средства для создания дифферентующих моментов, заполняемые забортной водой (Правдин А.А. «Конструкция подводных лодок», М., Оборонгиз, 1947 г., стр. 189), либо связанные между собой дифферентным трубопроводом с насосом (К.Н. Чайников «Общее устройство судов», Л., Судостроение, 1971 г., параграф 42 Корабельные системы подводных лодок).
Известна дифферентная система подводного аппарата, которая для уменьшения габаритов системы состоит из груза (балласта) с возможностью его перемещения вдоль корпуса подводного аппарата (патенты №2172699 RU и №2282556 RU).
Для снижения размеров дифферентной системы известно техническое решение, состоящее из двух размещенных в оконечностях подводного технического средства дифферентных цистерн, разделенных гибкой диафрагмой на ртутную и масляную полости, попарно соединенные ртутным и масляным трубопроводами с арматурой, и насоса, установленного на масляном трубопроводе. Использование ртути, обладающей высоким удельным весом (13500 кг/м3), позволяет минимизировать размеры дифферентной системы (М.Н. Диомидов, А.Н. Дмитриев. «Подводные аппараты», Л., Судостроение, 1966 г., стр. 310-312, рис. 129).
Известна дифферентная система подводного технического средства (патент №2585392 RU), включающая дифферентные цистерны, расположенные в оконечностях подводного технического средства для создания дифферентующих моментов, заполняемые ртутью и маслом, причем цистерны с ртутью расположены внутри цистерн с маслом для безопасности эксплуатации системы.
В качестве прототипа принята система вывески и дифферентовки подводного грузового контейнера (патент №2618583 RU), состоящая из двух одинаковых независимых систем вывески, которые установлены в носовой и кормовой оконечностях. Независимые системы содержат уравнительные цистерны, аккумуляторные батареи, газовые баллоны с электроклапанами, электроклапаны вентиляции и кингстонов, блоки автоматики.
Техническое решение прототипа, применительно к самоходным необитаемым подводным аппаратам имеет ряд недостатков:
 весьма объемные приборные отсеки (из-за наличия автономных аккумуляторных батарей и газовых баллонов) уменьшают объем грузовых отсеков при неизменных внешних габаритах АНПА;
весьма объемные приборные отсеки (из-за наличия автономных аккумуляторных батарей и газовых баллонов) уменьшают объем грузовых отсеков при неизменных внешних габаритах АНПА;
металлическое исполнение дифферентных цистерн в составе корпусных конструкций АНПА и имеющейся компоновки приборного отсека существенно вырастет масса аппарата;
блок автоматики выполняет задачи только автоматической вывески и дифферентовки на ноль. Работа уравнительно-дифферентной системы в составе АНПА дополнительно подразумевает создание положительного или отрицательного дифферента и положительной или отрицательной плавучести путем дистанционного управления извне.
Задачей, решаемой настоящим изобретением, является устранение указанных выше недостатков, а именно уменьшение объема и массы уравнительно-дифферентной системы, а также ее адаптации к работе в составе АНПА.
Технический результат заявляемого изобретения заключается в придании уравнительно-дифферентной системе компактности с расширением ее функционала.
Это достигается тем, что уравнительно-дифферентные цистерны выполнены эластичными. Такое исполнение цистерн позволяет максимально эффективно использовать пространство отсеков аппарата. Кроме того, масса такой цистерны примерно в 5 раз меньше стальной. Изменен принцип регулирования количества воды в цистернах: взамен сжатого воздуха из газовых баллонов с аккумуляторными батареями применен высоконапорный насос, работающий от электроэнергетической системы АНПА. Расширен функционал блока автоматики, который может быть выполнен в одном экземпляре, работая на носовую и кормовую системы при наличии общей электросети.
Функционал блока автоматики: вывеска и дифферентовка аппарата на ноль, создание положительного или отрицательного дифферента и положительной или отрицательной плавучести с возможностью дистанционного управления извне.
Предлагаемая уравнительно-дифферентная система подводного технического средства иллюстрируется чертежом, представленным на фиг. 1.
Уравнительно-дифферентная система АНПА размещена, как правило, внутри прочного корпуса 1 (или отдельных прочных капсулах) и включает эластичные уравнительно-дифферентные цистерны: носовую 2 и кормовую 4, высоконапорные электронасосы 3, расходомеры 5, фильтры 6, блок автоматики 7, тензо- или пьезодатчики 8 и клапаны 9. При этом блок автоматики 7 может получать команды извне АНПА, дистанционно. Система содержит также необходимые трубопроводы с запорной арматурой (на фиг. 1 не показаны).
Уравнительно-дифферентная система АНПА работает следующим образом.
АНПА погружается в воду с носителя или берега с помощью грузового крана или других грузоподъемных устройств. В данном случае аппарат при сухих цистернах имеет положительную плавучесть и располагается в воде с определенной осадкой.
Для вывески АНПА на нулевую плавучесть в носовую 2 (общим объемом Vн) и кормовую 4 (общим объемом Vк) цистерны принимается вода посредством включения блока автоматики 7 на синхронное открытие/закрытие клапанов 9. Расчетная (постоянная) нагрузка аппарата должна быть такой, чтобы в результате вывески цистерны были заполнены наполовину, то есть необходимое количество воды для приема в носовую цистерну 2 равно Vн/2 и в кормовую 4 также равно Vк/2. Количество воды, которое поступает в цистерны или откачивается из них, определяется с помощью расходомеров 5 и контролируется с помощью тензо- или пьезодатчиков 8. Если количество воды в цистернах превышено, блок автоматики 7 включает синхронную работу насосов 3 на откачку воды до требуемой величины.
Для удифферентовки аппарата блок автоматики 7 включает асинхронную работу насосов, то есть носовой насос 3 на откачку воды из носовой цистерны 2, а кормовой насос 3 на прием воды в кормовую цистерну 4 и наоборот в зависимости от задачи по удифферентовке.
Операции изменения плавучести аппарата и дифферента выполняются под управлением блока автоматики 7 с помощью клапанов 9, насосов 3, цистерн 2 и 4, расходомеров 5 и тензо- или пьезодатчиков 8 дистанционно.
Таким образом, представленное описание и чертеж позволяет сделать заключение о том, что заявленная уравнительно-дифферентная система АНПА обладает новизной, отличаясь от прототипа такими существенными признаками как применение высоконапорных насосов вместо газовых баллонов со сжатым воздухом и аккумуляторных батарей, уравнительно-дифферентные цистерны выполнены эластичными, блок автоматики способен управлять системой для выполнения задач АНПА по вывеске на нулевую плавучесть, изменении плавучести и дифферента с дистанционным управлением извне.
| название | год | авторы | номер документа |
|---|---|---|---|
| Система изменения плавучести и дифферента АНПА с автоматическим управлением | 2019 |
|
RU2724920C1 |
| Система вывески и дифферентовки подводного грузового контейнера | 2015 |
|
RU2618583C2 |
| Транспортировщик водолазов | 2017 |
|
RU2667113C1 |
| Способ определения величины коэффициента остойчивости необитаемого подводного аппарата опытным путем | 2020 |
|
RU2736794C1 |
| ТРАНСПОРТИРОВЩИК ВОДОЛАЗОВ | 2011 |
|
RU2458816C1 |
| СИСТЕМА НАВИГАЦИИ АВТОНОМНОГО НЕОБИТАЕМОГО ПОДВОДНОГО АППАРАТА | 2011 |
|
RU2460043C1 |
| ПОДВОДНЫЙ ТАНКЕР | 2008 |
|
RU2380274C1 |
| АВТОНОМНЫЙ НЕОБИТАЕМЫЙ ПОДВОДНЫЙ АППАРАТ-АМФИБИЯ | 2019 |
|
RU2713494C1 |
| Транспортировщик водолазов | 2021 |
|
RU2760757C1 |
| АВТОНОМНЫЙ НЕОБИТАЕМЫЙ ПОДВОДНО-НАДВОДНЫЙ АППАРАТ ПЛАНЕРНОГО ТИПА | 2024 |
|
RU2831312C1 |

Изобретение относится к области подводного судостроения, в частности к системам управления плавучестью и дифферентом подводных устройств. Система уравнительно-дифферентная автономного необитаемого подводного аппарата включает в себя носовую и кормовую цистерны, насосы и трубопроводы для приема и удаления воды из цистерн. Цистерны выполнены эластичными, выполняющими как уравнительную, так и дифферентную функцию. Установлены цистерны в прочном корпусе автономного необитаемого подводного аппарата и оборудованы тензодатчиками для измерения веса и объема воды, находящимися внутри упомянутых выше цистерн, а операции изменения плавучести и дифферента выполняются дистанционно с помощью блока автоматики, высоконапорных электронасосов и клапанов. Достигается компактность уравнительно-дифферентной системы. 1 з.п. ф-лы, 1 ил.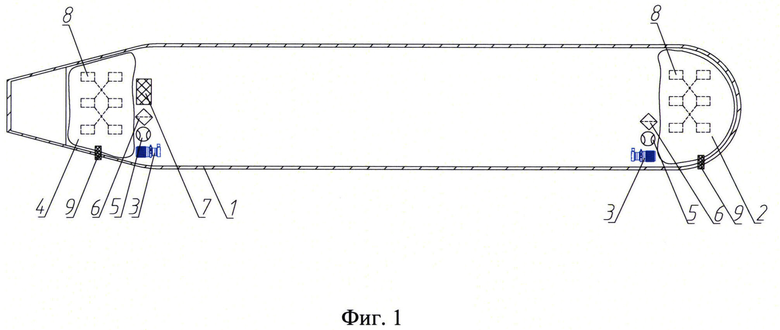
1. Система уравнительно-дифферентная автономного необитаемого подводного аппарата, включающая носовую и кормовую цистерны, насосы и трубопроводы для приема и удаления воды из цистерн, отличающаяся тем, что цистерны выполнены эластичными, выполняющими как уравнительную, так и дифферентную функцию, установлены в прочном корпусе автономного необитаемого подводного аппарата и оборудованы тензодатчиками для измерения веса и объема воды, находящимися внутри упомянутых выше цистерн, а операции изменения плавучести и дифферента выполняются дистанционно с помощью блока автоматики, высоконапорных электронасосов и клапанов.
2. Система уравнительно-дифферентная автономного необитаемого подводного аппарата по п.1, отличающаяся тем, что вместо тензодатчиков используются пьезодатчики.
| Система вывески и дифферентовки подводного грузового контейнера | 2015 |
|
RU2618583C2 |
| ПРИСПОСОБЛЕНИЕ ДЛЯ ПРИКРЕПЛЕНИЯ СЕКТОРОВ НАПРАВЛЯЮЩЕГО АППАРАТА, НАПРАВЛЯЮЩИЙ АППАРАТ И ТУРБОМАШИНА | 2003 |
|
RU2311539C2 |
| СПОСОБ ОБЕСПЕЧЕНИЯ УПРАВЛЯЕМОСТИ ПОДВОДНЫМ АППАРАТОМ | 2007 |
|
RU2421372C2 |
| ИНТЕГРИРОВАННЫЙ КОМПЛЕКС НАВИГАЦИИ И УПРАВЛЕНИЯ ДВИЖЕНИЕМ ДЛЯ АВТОНОМНЫХ НЕОБИТАЕМЫХ ПОДВОДНЫХ АППАРАТОВ | 2011 |
|
RU2483327C2 |
| US 7139647 B2, 21.11.2006. | |||

