Техническое решение относится к горной промышленности, а именно к горным машинам с исполнительным органом ударного действия, и может быть использовано для непрерывного послойного разрушения горных пород различной крепости на откосах высоких уступов при открытой разработке месторождений полезных ископаемых.
Известно рабочее оборудование гидравлического экскаватора по патенту РФ на полезную модель №15351, E02F 3/28, опубл. 10.10.2000, содержащее шарнирно сочлененные стрелу и рукоять, шарнирно закрепленный на рукояти фрезерный рабочий орган с двумя симметрично расположенными фрезами с резцами, зачистной ковш и привод фрез.
Данное оборудование гидравлического экскаватора обладает ограниченной областью применения и низкой эффективностью, т.к. не может вести отработку откосов уступов высотой более 5÷6 м и не позволяет выставить оборудование на новой позиции для отработки последующего слоя горной массы, параллельно предыдущему.
Наиболее близким по технической сущности и совокупности существенных признаков является устройство, размещенное на поворотной платформе гидравлического экскаватора по патенту РФ на изобретение №2187600, E02F 5/30, 5/08, опубл. 20.08.2002, включающее двухбалочную стрелу, гидроцилиндры ее подъема-опускания, причем стрела оснащена внутренними направляющими в каждой балке, размещенную в них тележку с опорными роликами, дисковую фрезу с механизмами ее вращения и перемещения вдоль стрелы, установленную на тележке, генератор питания электродвигателей, электрические кабели, расположенные на стреле.
Основным недостатком этого устройства является нерегулируемая длина его стрелы - это позволяет выполнять отработку горной породы только на откосах уступов ограниченной высоты. Нельзя выставить оборудование на новой позиции для отработки последующего слоя горной массы, параллельно предыдущему, обеспечивающее наиболее эффективный режим работы, т.к. у гидравлического экскаватора регулировка положения платформы с оборудованием относительно горизонтальной плоскости не предусмотрена. Использование в качестве рабочего органа дисковой фрезы не позволяет вести эффективную послойную отработку откосов уступов.
Кроме того, из-за относительно длинной консольной стрелы, шарнирно присоединенной к экскаватору с массивной тележкой на конце, обусловлена низкая устойчивость экскаватора и плохая маневренность в транспортном положении.
Технической задачей предлагаемого решения является расширение технологических возможностей и повышение эффективности работы устройства за счет обеспечения послойной отработки или оборки откосов уступов высотой до 30 м, повышения устойчивости и маневренности, возможности корректировки положения платформы с оборудованием перед отбойкой каждого слоя горной породы или оборкой откосов уступов, использования наименее энергоемкого широкозахватного породоразрушающего рабочего органа ударного действия.
Поставленная задача достигается тем, что в устройстве для отработки откосов уступов, включающем платформу, стрелу, оснащенную направляющими, подвешенную на них тележку с опорными роликами, имеющую механизм перемещения вдоль стрелы, породоразрушающий рабочий орган с механизмом его вращения, причем на платформе размещены гидроцилиндры поворота стрелы, дизель-генератор и маслостанция, согласно техническому решению стрела оборудована механизмом осевого перемещения, посредством которого она кинематически связана с платформой.
Использование механизма осевого перемещения стрелы и кинематической связи его с платформой позволяет изменять вылет стрелы и устанавливать стрелу под любым углом к горизонту, что дает возможность отрабатывать откосы уступов с различными углами и высотой до 30 м или вести их оборку, что расширяет технологические возможности устройства, повышает его эффективность. Осевое перемещение стрелы дает возможность располагать центр тяжести стрелы на одной вертикали с центром тяжести платформы, например, в транспортном положении, что значительно повышает устойчивость устройства.
Целесообразно при этом платформу оснастить ходовыми стойками с гидроцилиндрами-домкратами и с ходовыми колесами, имеющими независимые приводы их вращения и независимые механизмы поворота вокруг вертикальной оси. Такое техническое решение позволяет устанавливать платформу горизонтально и выполнять отбойку каждого последующего слоя горной породы параллельно предыдущему, при этом обеспечивает хорошую маневренность во время выполнения технологических операций, связанных с отработкой откосов уступов или их оборкой, что повышает эффективность работы устройства.
Целесообразно, чтобы породоразрушающим рабочим органом служил молотковый ротор, который обладает наименьшей удельной энергоемкостью разрушения горных пород в зависимости от их прочности, что значительно повышает эффективность работы устройства.
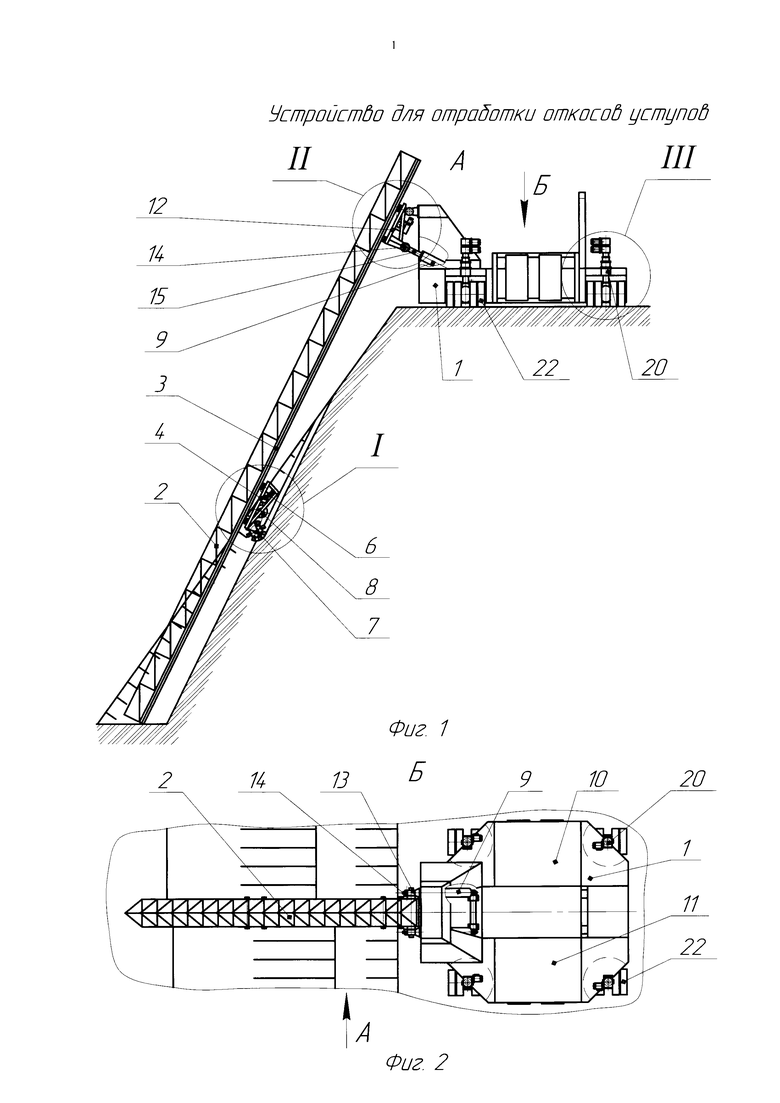
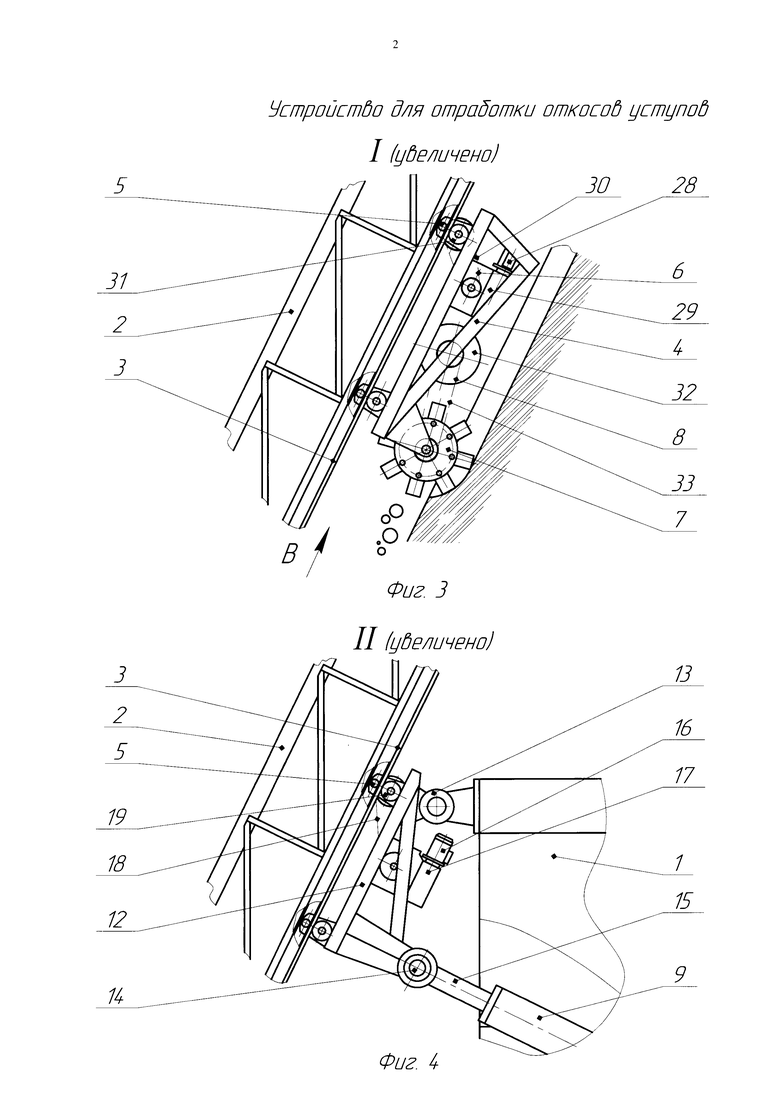
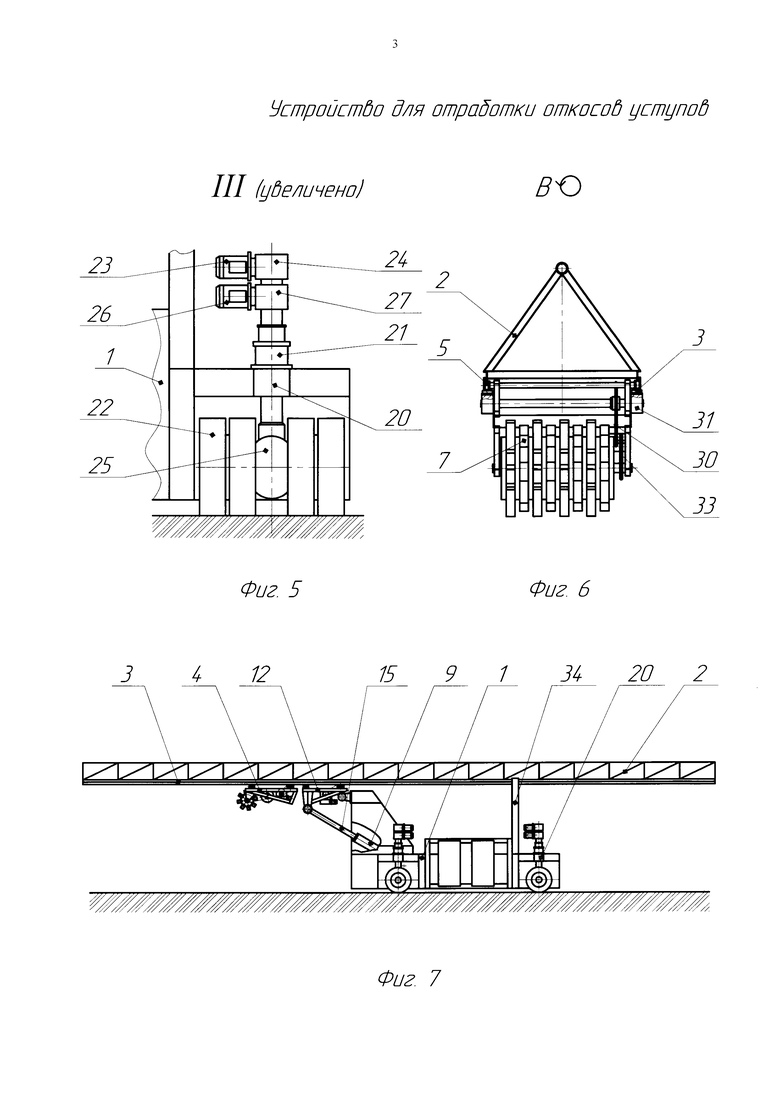
Сущность технического решения иллюстрируется примером конкретного исполнения устройства для отработки откосов уступов и чертежами фиг. 1-7. На фиг. 1 представлено устройство для отработки откосов уступов в рабочем положении - вид по стрелке А на фиг. 2; на фиг. 2 - вид по стрелке на Б на фиг. 1; на фиг. 3 - выносной элемент I на фиг. 1; на фиг. 4 выносной элемент II на фиг. 1; на фиг. 5 - выносной элемент III на фиг. 1; на фиг. 6 - вид по стрелке В на фиг. 3; на фиг. 7 представлено устройство для отработки откосов уступов в транспортном положении.
Устройство для отработки откосов уступов (далее - устройство) содержит платформу 1 (фиг. 1, 2, 4, 5, 7), стрелу 2, оснащенную направляющими 3 (фиг. 1, 3, 4, 6, 7), подвешенную на них тележку 4 с опорными роликами 5 (фиг. 3), имеющую механизм 6 перемещения вдоль стрелы 2, породоразрушающий рабочий орган - молотковый ротор 7 (фиг. 1, 3, 6) с механизмом 8 его вращения. На платформе 1 размещены гидроцилиндры 9 (фиг. 1, 2, 4, 7) поворота стрелы 2, дизель-генератор 10 (фиг. 2) и маслостанция 11. Стрела 2 оборудована механизмом 12 осевого перемещения (фиг. 1, 4, 7), посредством которого она шарниром 13 кинематически связана с платформой 1, и шарниром 14 со штоками 15 (фиг. 1, 4, 7) гидроцилиндров 9 поворота стрелы 2. В механизм 12 осевого перемещения входит электродвигатель 16, редуктор 17, цепная передача 18, колеса 19, которые опорными роликами 5 осуществляют геометрическое замыкание с направляющими 3.
Платформа 1 оснащена ходовыми стойками 20 (фиг. 1, 2, 5, 7) с гидроцилиндрами-домкратами 21 (фиг. 5) и с ходовыми колесами 22, имеющими независимые приводы их вращения и независимые механизмы поворота вокруг вертикальной оси. При этом независимые приводы вращения ходовыми колесами 22 каждой ходовой стойки 20 состоят из электродвигателя 23, редуктора 24, дифференциального механизма 25, а каждый независимый механизм поворота вокруг вертикальной оси, состоящий из электродвигателя 26, редуктора 27, вала (на фиг. не показан), осуществляет поворот корпуса дифференциального механизма 25.
Механизм 6 (фиг. 1, 3) перемещения тележки 4 вдоль стрелы 2 содержит электродвигатель 28 (фиг. 3), редуктор 29, цепную передачу 30 колеса 31 и опорные ролики 5. Механизм 8 вращения (фиг. 1, 3) молоткового ротора 7 состоит из электродвигателя 32 (фиг. 3) и цепной передачи 33.
Для фиксации стрелы 2 в транспортном положении на платформе 1 смонтирована стойка 34 (фиг. 7).
Устройство работает следующим образом.
Устройство находится в транспортном положении (фиг. 7), у него сначала запускают дизель-генератор 10 (фиг. 2), а затем маслостанцию 11. Управляя работой электродвигателей 23 (фиг. 5) и 26 на ходовых стойках 20, платформу 1 располагают на необходимом расстоянии от бровки откоса (фиг. 1). Затем на четырех ходовых стойках 20 (фиг.5) ходовые колеса 22 гидроцилиндрами-домкратами 21 поднимают, платформа 1 опустится на поверхность уступа. Включают электродвигатели 26 и с помощью редукторов 27 разворачивают корпусы дифференциальных механизмов 25 вокруг вертикальных осей, а вместе с ними ходовые колеса 22 для движения вдоль бровки откоса (фиг. 1, 2), далее независимо друг от друга ходовые колеса 22 опускают гидроцилиндрами-домкратами 21, пока платформа 1 не займет горизонтальное положение. Втягивают штоки 15 гидроцилиндров 9 (фиг. 1, 4) поворота стрелы 2, механизм 12 осевого перемещения на шарнире 13 (фиг. 4) поворачивают против часовой стрелки и вместе с ним поворачивают стрелу 2 из транспортного положения против часовой стрелки на необходимый угол. Включают электродвигатель 16 и с помощью редуктора 17, цепной передачи 18, колес 19 стрела 2, удерживаемая на направляющих 3 опорными роликами 5, перемещается вниз вдоль откоса до касания ею нижней площадки уступа (фиг. 1). Одновременно включают электродвигатель 28 (фиг. 3) и через редуктор 29, цепную передачу 30 движение передается на колеса 31 для перемещения тележки 4, удерживаемой на направляющих 3 стрелы 2 опорными роликами 5, в крайнее верхнее (исходное) положение. Устройство готово к работе.
Следующий этап - включают электродвигатель 32 (фиг. 3), через цепную передачу 33 вращение получает молотковый ротор 7, затем включают электродвигатель 28 и через редуктор 29, цепную передачу 30 колеса 31 тележка 4 начинает рабочий ход - движение вниз по направляющим 3 (фиг. 1, 3). Скорость движения тележки 4 регулируется изменением частоты подаваемого тока на электродвигатель 28 в зависимости от крепости горной породы на откосе и глубины снимаемого слоя. Частотой вращения молоткового ротора 7 также можно управлять с помощью преобразователя частоты тока, подаваемого на электродвигатель 32. Отбитая горная порода под действием силы тяжести поступает на нижнюю площадку уступа, откуда она транспортируется известным способом.
В нижнем положении тележки 4 включают на реверс электродвигатель 28, и она совершает холостой ход - движение вверх, осуществляя вращающимся молотковым ротором 7 оборку ранее отработанной поверхности откоса. В крайнем верхнем положении (исходном положении) тележки 4 электродвигатели 28 и 32 отключаются. Стрелу 2 поднимают вверх, например, на 0,5 м, затем включают электродвигатели 23, далее через редукторы 24, дифференциальные механизмы 25 ходовые колеса 22 получают вращающий момент и перемещают платформу 1 вдоль бровки откоса на ширину захвата молоткового ротора 7 - на следующую рабочую позицию. При необходимости для корректировки положения платформы 1 на новой рабочей позиции на четырех ходовых стойках 20 независимо друг от друга гидроцилиндрами-домкратами 21 опускают или поднимают ходовые колеса 22, пока она не займет горизонтальное положение. Выдвигая или втягивая штоки 15 гидроцилиндров 9 поворота стрелы 2, можно окончательно ее выставить относительно откоса. Далее включают электродвигатель 16 и с помощью редуктора 17, цепной передачи 18, колес 19 стрелу 2 перемещают вдоль оси до касания нижней площадки уступа, затем электродвигатель 16 выключают - устройство готово к работе с наибольшей эффективностью на следующей рабочей позиции.
Далее цикл работы устройства повторяется.
Возможен и другой цикл работы устройства, повышающий эффективность его работы практически в два раза. После окончания рабочего хода тележки 4 вниз стрелу 2 поднимают вверх, например, на 0,5 м, затем выдвигают штоки 15 гидроцилиндров 9 поворота стрелы 2, т.е. поворачивают стрелу 2 по часовой стрелке и отводят тележку 4 с молотковым ротором 7 от забоя. Включают электродвигатели 23, далее через редукторы 24, дифференциальные механизмы 25 ходовые колеса 22 получают вращающий момент и перемещают платформу 1 вдоль бровки откоса на ширину захвата молоткового ротора 7 на следующую рабочую позицию. С помощью гидроцилиндров-домкратов 21 выставляют платформу 1 в горизонтальном положении. Втягивают штоки 15 гидроцилиндров 9 поворота стрелы 2, поворачивают ее против часовой стрелки, т.е. прижимают работающий молотковый ротор 7 к поверхности откоса, врубаются на нужную глубину, стрелу 2 опускают до упора в нижнюю площадку откоса. Далее включают электродвигатель 28 для выполнения рабочего хода тележки 4 при ее движении вверх.
При необходимости увеличения угла откоса отрабатывается сначала его нижний участок с последовательным увеличением его высоты (фиг. 1). Далее послойно ведется отработка поверхности откоса до необходимой ширины верхней площадки уступа.
По окончании отработки откосов уступов устройство переводится в транспортное положение следующим образом. Выдвигая штоки 15 гидроцилиндров 9 поворота стрелы 2, поворачивают стрелу 2 по часовой стрелке, отводят тележку 4 с молотковым ротором 7 от забоя. Одновременно включают электродвигатель 16 и с помощью редуктора 17, цепной передачи 18, колес 19 перемещают стрелу 2 вверх на половину ее длины, электродвигатель 16 выключают. Дальнейшим выдвижением штоков 15 гидроцилиндров 9 поворота стрелы 2 она прижимается к стойке 34 (фиг. 7), выдвижение штоков 15 прекращают. Включают электродвигатель 28 и с помощью редуктора 29, цепной передачи 30, колес 31 перемещают тележку 4 с невращающимся молотковым ротором 7 к механизму 12 осевого перемещения (фиг. 7).
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ разработки сложноструктурных месторождений твердых полезных ископаемых | 2019 |
|
RU2715498C1 |
| Навесное оборудование гидравлического экскаватора для оборки откосов уступов | 2020 |
|
RU2756889C1 |
| РАБОЧЕЕ ОБОРУДОВАНИЕ ГИДРАВЛИЧЕСКОГО ЭКСКАВАТОРА | 2001 |
|
RU2187600C1 |
| ЭКСКАВАТОР ДЛЯ ПЛАНИРОВАНИЯ И ЗАСЕВА ОТКОСОВ ОТВАЛА | 1992 |
|
RU2024692C1 |
| ГОРНЫЙ СТРЕЛОВОЙ ФРЕЗЕРНЫЙ КОМБАЙН | 2006 |
|
RU2315866C1 |
| Роторный экскаватор | 1984 |
|
SU1177418A1 |
| САМОХОДНАЯ УСТАНОВКА ДЛЯ ЛОКАЛИЗАЦИИ ВЗРЫВА | 2005 |
|
RU2289092C1 |
| РОТОРНЫЙ ЭКСКАВАТОР | 1973 |
|
SU383791A1 |
| СПОСОБ РАЗРУШЕНИЯ ГОРНЫХ ПОРОД ВЗРЫВОМ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2005 |
|
RU2320956C2 |
| РАБОЧЕЕ ОБОРУДОВАНИЕ ГИДРАВЛИЧЕСКОГО ЭКСКАВАТОРА | 2008 |
|
RU2380487C1 |
Изобретение относится к горной промышленности - к горным машинам с исполнительным органом ударного действия, используется для непрерывного послойного разрушения горных пород различной крепости на откосах высоких уступов при открытой разработке месторождений полезных ископаемых. Устройство включает платформу, стрелу, оснащенную направляющими, подвешенную на них тележку с опорными роликами, имеющую механизм перемещения вдоль стрелы, породоразрушающий рабочий орган с механизмом его вращения, причем на платформе размещены гидроцилиндры поворота стрелы, дизель-генератор и маслостанция. Стрела оборудована механизмом осевого перемещения, посредством которого она кинематически связана с платформой. Платформа оснащена ходовыми стойками с гидроцилиндрами-домкратами и с ходовыми колесами, имеющими независимые приводы их вращения и независимые механизмы поворота вокруг вертикальной оси. Породоразрушающим рабочим органом служит молотковый ротор. Технический результат - обеспечение послойной отработки откосов уступов высотой до 30 м, повышение устойчивости и маневренности, возможность корректировки горизонтального положения платформы с оборудованием перед отбойкой каждого слоя горной породы или оборкой откосов уступов, использование наименее энергоемкого рабочего органа ударного действия. 2 з.п. ф-лы, 7 ил.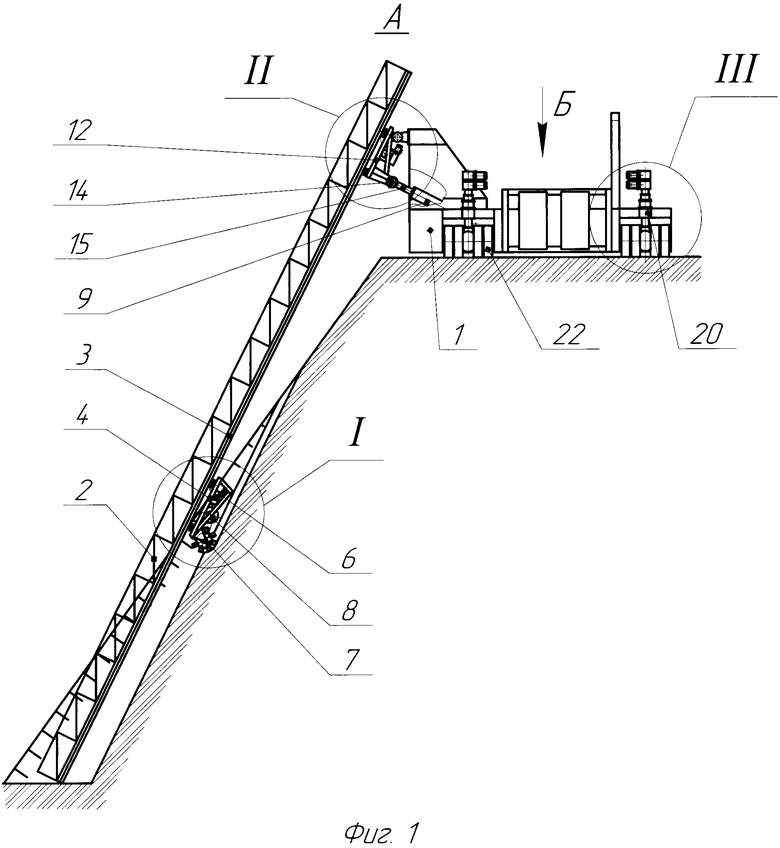
1. Устройство для отработки откосов уступов, включающее платформу, стрелу, оснащенную направляющими, подвешенную на них тележку с опорными роликами, имеющую механизм перемещения вдоль стрелы, породоразрушающий рабочий орган с механизмом его вращения, причем на платформе размещены гидроцилиндры поворота стрелы, дизель-генератор и маслостанция, отличающееся тем, что стрела оборудована механизмом осевого перемещения, посредством которого она кинематически связана с платформой.
2. Устройство для отработки откосов уступов по п. 1, отличающееся тем, что платформа оснащена ходовыми стойками с гидроцилиндрами-домкратами и с ходовыми колесами, имеющими независимые приводы их вращения и независимые механизмы поворота вокруг вертикальной оси.
3. Устройство для отработки откосов уступов по п. 1 или 2, отличающееся тем, что породоразрушающим рабочим органом служит молотковый ротор.
| РАБОЧЕЕ ОБОРУДОВАНИЕ ГИДРАВЛИЧЕСКОГО ЭКСКАВАТОРА | 2001 |
|
RU2187600C1 |
| РАБОЧЕЕ ОБОРУДОВАНИЕ ГРЕЙФЕРА-ПЛАНИРОВЩИКА | 0 |
|
SU272900A1 |
| DE 102005036641 A1, 08.02.2007 | |||
| ЭКСКАВАТОР | 2006 |
|
RU2325485C1 |
| Конденсатор | 1923 |
|
SU657A1 |

