Изобретение относится к горным машинам непрерывного действия, а именно к роторным экскаваторам, которые могут использоваться для откры той разработки полезных ископаемых, Цель изобретения - повьпиение надежности экскаватора в работе путем снижения динамических нагрузок на форму и расширение технологических возможностей. На фиг.1 изображен предлагаемый экскаватор,вид сбоку; на фиг.2 то же, вид сверху; на фиг.3 - рабочий орган, вид сбоку. Роторный экскаватор состоит из ходовых тележек 1, наклонной фермы 2, горизонтальных ферм 3, транспортера 4, рабочего органа 5 с приемнопитающим устройством (желобом) 6, привода 7 механизма передвижения вдоль транспортера, гибкого органа 8 опорных катков 9 несущей опоры. Рабо чий орган 5 содержит неподвижную часть - статор 10, на который опирается подвижная часть - ротор 11 посредством роликов 12. Статор 10 выполнен полым (в виде кольца), внутри него заключена наклонная ферма 2. Ротор снабжен зубчатым венцом 13 и оборудован ковшами 14. На CTaTo ре расположен двигатель 15 с редуктором 16, одна из шестерен которого входит в зацепление с зубчатым венцом 13. Статор снабжен опорными стой ками 17 с катками 18, которые связаны с ними шарнирами 19. Опорные стой ки имеют гидроципиндры 20 управления штоки 21 связаны со стойками шарни-. . Статор соединен с несущей опорой транспортера направляющими 23 с ходовыми колесами 24. Выполнение рабочего органа из неподвижной (статора) и подвижной (ротора) частей позволяет производить процесс экскавации при перемещении рабочего органа вдоль наклонной фермы. Статор 10 рабочего органа снабжен шарнирно связанными с ним опорными стойками с катками и гидроцилиндрами управления, штоки которых шарнирно связаны со стойками. Иакая конструкция позвотяет уменьшить статические нагрузки на несущую констру цию путем ликвидации крутящего момента, вызванного вращением ротора 11, и / днамические нагрузки, используя при этом гидроцилиндры 20 в качестве демпфируюпщх устройств при ра боте ротора 11 и передвижении рабочего органа 5 по неровной поверхности. Это позволяет располагать точку опоры статора на различных уровнях относительно основания вьфаботки, что дает возможность отрабатьтать уступ по фронту работ в прямом и обратном направлении при соответствующей конструкции ковшей 14, и позволяет также регулировать угол наклона вертикальной плоскости рабочего органа относительно продольной оси транспортера 4, что ведет к изменению параметров стружки и усилия резания породы. Катки 18 служат для передвижения рабочего органа вдоль транспортера и имеют возможность поворота вокруг вертикальной оси на 360°. Все это расширяет технологические возможности роторного экскаватора. Рабочий орган 5 соединен с несущей опорой транспортера 4 ходовыми колесами 24 и с приводом 7 механизма передвижения вдоль транспортера посредством гибкого органа 8. Такая конструкция позволяет перемещать рабочий орган вдоль транспортера, осуществлять это перемещение плавно, изменять в широких пределах боковое усилие резания, не увеличивая динамические нагрузки на несущую опору. В случае необходимости ходовые колеса могут дополнительно снабжаться собственным приводом движения. Направляющие 23 соединены гибким органом 8 (канатом) с одной стороны с приводом 7 механизма передвижения, а с другой стороны гибкий орган протянут через блок. Таким образом обеспечивается возвратно-поступательное движение рабочего органа (по челноковой схеме). Между верхними направляющими 23 расположен транспортер 4 - ленточный или специальньй конвейер. При использовании обычных ленточных конвейеров угол откоса отрабатываемого уступа составляет до 18°, при установке крутонаклонных конвейеров он может достигать 30-45. Наличие указанных вьш1е признаков расширяет технологические возможности предлагаемого устройства. Несущая опора транспортера соединена с ходовыми тележками 1 при помощи опорных катков 9 с возможностью поперечного перемещения относительно направления движения ходовых тележек, 31 что позволяет путем наезда на откос уступа несущей опоры устанавливать глубину экскавации породы, увеличивать усилие резания, обеспечивать маневренность устройства и тем самым расширить технологические возможност Экскаватор работает следующим образом. При отработке уступа одна из ходовых тележек 1 располагается на ниж ней площадке, а другая - на верхней площадке. Перед началом отработки-ра бочий орган 5 размещают, например, в крайней нижней точке наклонной фермы 2.С помощью гибкого тягового органа 3,соединенного одним концом с напра ляющими 23 статора 10, а другим - с приводом 7 механизма передвижения, осуществляют передвижку рабочего органа 5 вдоль наклонной фермы 2 при одновременной экскавации горной массы. После снятия первого слоя (когда рабочий орган 5 занимает- крайнее верхнее положение на наклонной ферме) горизонтальные фермы 3, а вместе с ними и всю несущую опору транспортера передвигают на опорных катках 9 в поперечном направлении движения ходовых тележек 1 в сторону подвигания фронта работ уступа. Затем производят экскавацию очередного слоя рабочим органом 5 в обратном направлении вдоль наклонной плоскости фермы. Таким образом осуществляют врезку в новую заходку, пока не будет установлена требуемая глубина копания. После этого отработку заходки ведут вдоль линии фронта ра184бот уступа, периодически перемещая ходовые тележки. 1 вслед за отработкой каждого очередного слоя. Катки 18 при этом, выполненные, например ленивыми, поворачиваются в сторону движения рабочего органа. При отработке нижней части уступа несущую опору двигают на опорных катках. Опорные стойки 17 с гйдроцилиндрами 20 управления опираются катками 18 спереди по ходу движения экскаватора на верхнюю площадку откоса уступа, а сзади по ходу - на нижнюю площадку откоса уступа. Это позволяет увеличить усилие резания породы, ликвидировать крутящий момент от вращения ротора на наклонную ферму, регулировать параметры стружки наклонного, рабочего органа 5 с помощью гидроцилиндров 20 управления, снизить динамические нагрузки, используя последние в качестве демпфирующих устройств. Экскавируемая порода из ковшей 14 ротора 11 поступает на приемно-питающее устройство(желоб) 6, затем на конвейерный транспортер 4, а с него - либо на верхний, либо на нижний горизонт в зависимости от места расположения последующего в технологической цепи транспорте- ра. После з-авершения отработки заходки вдоль фронта работ при соответствующей конструкции ковшей аналогичным образом вйдут отработку заходки в обратном направлении, что позволяет сделать процесс разработки горных пород полностью непрерывным.
N
si C4i
//
w
12
/3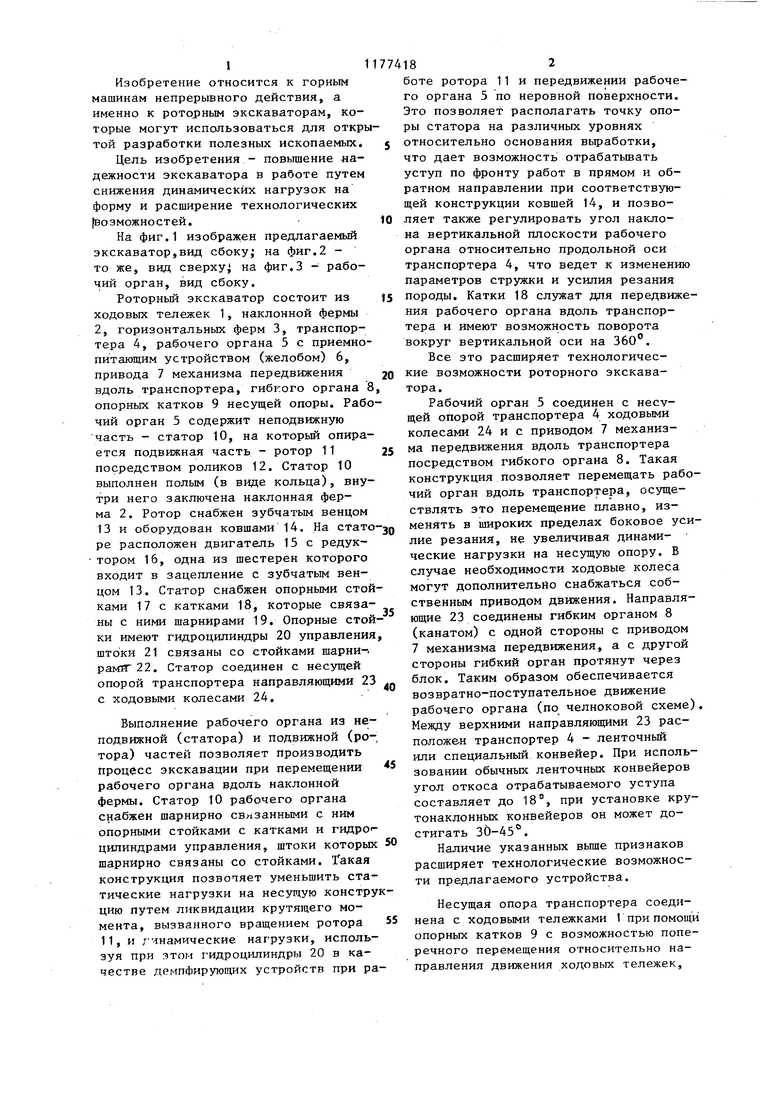

| название | год | авторы | номер документа |
|---|---|---|---|
| Роторный экскаватор специального назначения | 2024 |
|
RU2834251C1 |
| ЭКСКАВАЦИОННО-ТРАНСПОРТИРУЮЩИЙ КОМПЛЕКС | 2011 |
|
RU2456454C1 |
| Роторный экскаватор-отвалообразователь | 1970 |
|
SU339202A1 |
| Роторный экскаватор | 1974 |
|
SU514064A1 |
| Экскавационная машина | 1988 |
|
SU1609878A1 |
| МНОГОКОВШОВЫЙ ВСКРЫШНОЙ АГРЕГАТ | 2011 |
|
RU2471043C1 |
| Способ разработки уступа | 1988 |
|
SU1585518A1 |
| СПОСОБ ФОРМИРОВАНИЯ КРУТОНАКЛОННОГО ТРАНСПОРТНОГО СЪЕЗДА | 2010 |
|
RU2425220C1 |
| ВСКРЫШНОЙ АГРЕГАТ | 2009 |
|
RU2396394C1 |
| СПОСОБ ПОДГОТОВКИ НОВОГО ТРАНСПОРТНОГО ГОРИЗОНТА И ЭКСКАВАТОРНО-ЖЕЛЕЗНОДОРОЖНЫЙ КОМПЛЕКС ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2000 |
|
RU2186982C1 |


1. РОТОРНЫЙ ЭКСКАВАТОР, содержащий ходовые тележки, расположенную между ними ферму с транспортером, имеющим опоры приводной каретки с тяговым органом и роликами и размещенным на ней ротором, обхватьтающим транспортер и имеющим неподвижную часть и подвижную часть с ковшами, отличающийся тем, что, с целью повышения надёж vvT: fe.:.- ;«/ ности экскаватора в работе путем . снижения динамических нагрузок на ферму и расширения технологических возможностей, неподвижная часть ротора снабжена связанными с ней опорными стойками с катками и гидроцилиндрами управления, штоки которых шарнирно связаны с опорными стойками. 2.Экскаватор поп.1, отличающий.с я тем, что тяговый орган выполнен в виде каната, один конец которого связан с кареткой, а i другой - с приводомj3.Экскаватор по п.1, отли(Л чающийся тем, что опоры транспортера связаны с ходовыми тележками при помощи опорньрс катков и установлены с возможностью поперечного перемещения относительно направления движения ходовых тележек. -ч 4
| Тормозная система транспортного средства | 1972 |
|
SU563113A3 |
| Разборное приспособление для накатки на рельсы сошедших с них колес подвижного состава | 1920 |
|
SU65A1 |
| Композиция для пенопласта | 1987 |
|
SU1548195A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Планшайба для точной расточки лекал и выработок | 1922 |
|
SU1976A1 |
