[0001] Настоящая заявка основана на китайской заявке на патент №201410227627.0, поданной 27 мая 2014 г., все содержание которой включено в настоящий документ посредством ссылки, и испрашивает приоритет в соответствии с указанной заявкой.
ОБЛАСТЬ ТЕХНИКИ
[0002] Настоящее изобретение в общем относится к области вычислительной техники и, в частности, к способу и аппарату для измерения направления, а также терминалу.
УРОВЕНЬ ТЕХНИКИ
[0003] С развитием технологий терминалов терминалы, как правило, имеют все более разнообразные функции. Например, компас-приложение можно установить на терминале для измерения направления. Если нужно измерить направление, терминал запускает компас-приложение, а на интерфейсе терминала отображается виртуальная шкала компаса, чтобы отображать все направления на виртуальной шкале.
[0004] В процессе реализации настоящего изобретения заявителем были обнаружены следующие недостатки в известном уровне техники: компас-приложение может только отображать все направления на интерфейсе терминала и не может предоставить пользователю направление на изображении объекта.
СУЩНОСТЬ ИЗОБРЕТЕНИЯ
[0005] Чтобы решить эту проблему на известном уровне техники, настоящим изобретением представлены способ и аппарат для измерения направления, а также терминал.
[0006] Согласно первому аспекту вариантов осуществления настоящего изобретения предложен способ для измерения направления, включающий в себя: когда терминал выполняет компас-приложение, включение камеры и получение изображение объекта с помощью камеры; определение компасом-приложением фронтального направления камеры; и фронтальное направление отображается на изображении объекта.
[0007] Если требуется, включение камеры и получение изображения объекта с помощью камеры в то время как терминал выполняет компас-приложение, которое включает в себя обнаружение, находится ли терминал в наклонном положении, когда терминал выполняет компас-приложение; а если обнаружено, что терминал находится в наклонном положении, включается камера и получают изображение объекта с помощью камеры.
[0008] Если требуется, обнаружение, находится ли терминал в наклонном положении, включает в себя: измерение угла наклона между терминалом и горизонтальной плоскостью; определение, попадает ли угол наклона в заданный диапазон углов; и если обнаружено, что угол наклона попадает в заданный диапазон углов, определяется, что терминал находится в наклонном положении.
[0009] Если требуется, определение фронтального направления камеры с помощью компаса-приложения включает в себя: определение положения терминала и определение каждого направления терминала с помощью компаса-приложения; определение фронтального направления камеры в соответствии с положением терминала и каждым направлением терминала.
[0010] Если требуется, способ дополнительно включает в себя: определение других направлений в соответствии с фронтальным направлением, при этом другие направления включают в себя направление, противоположное фронтальному направлению, и направление, перпендикулярное фронтальному направлению; и другие направления отображаются соответственно на интерфейсе отображения.
[0011] Если требуется, способ дополнительно включает в себя: предварительно задание опорного направления; расчет угла отклонения фронтального направления по отношению к опорному направлению; и отображение угла отклонения на интерфейсе отображения.
[0012] Согласно второму аспекту вариантов осуществления настоящего изобретения предлагается аппарат для измерения направления, включающий в себя: модуль получения изображения объекта, выполненный так, чтобы включать камеру и получать изображение объекта в то время как терминал выполняет компас-приложение; модуль измерения направления, выполненный для определения фронтального направления камеры с помощью компаса-приложения; а также модуль отображения направления, выполненный для отображения фронтального направления, модулем измерения направления на изображении объекта, полученном с модуля получения изображения объекта.
[0013] Если требуется, модуль получения изображения объекта включает в себя: блок обнаружения наклона, выполненный для обнаружения, находится ли терминал в наклонном положении в то время как терминал выполняет компас-приложение; и блок получения изображения объекта для включения камеры и получения изображения объекта, выполненный для включения камеры и получения изображения объекта с помощью камеры, если блок обнаружения наклона обнаруживает, что терминал находится в наклонном положении.
[0014] Если требуется, блок обнаружения наклона включает в себя: подблок измерения угла, выполненный для измерения угла наклона между терминалом и горизонтальной плоскостью с помощью датчика направления в терминале; подблок обнаружения угла, выполненный для определения, попадает ли угол наклона, обнаруженный подблоком обнаружения угла, в заданный диапазон углов; и подблок определения наклона, выполненный для определения, что терминал находится в наклонном положении, если подблок обнаружения угла обнаружил, что угол наклона попадает в заданный диапазон углов.
[0015] Если требуется, модуль измерения направления включает в себя: блок определения параметров, выполненный для определения положение терминала, и определения каждого направления терминала с помощью компас-приложения; и блок измерения направления, выполненный для определения фронтального направления камеры в соответствии с положением терминала и каждого направления терминала, определенного блоком определения параметров.
[0016] Если требуется, аппарат дополнительно включает в себя: модуль определения направления, выполненный для определения других направлений в соответствии с фронтальным направлением, причем другие направления включают в себя направление, противоположное фронтальному направлению, и направление, перпендикулярное фронтальному направлению; первый модуль отображения, выполненный для соответственно отображения других направлений на интерфейсе отображения.
[0017] Если требуется, аппарат дополнительно включает в себя: модуль задания направления, чтобы задать опорное направление; модуль расчета угла, выполненный для расчета угла отклонения фронтального направления по отношению к опорному направлению; и второй модуль отображения, выполненный для отображения угла отклонения, рассчитанного модулем расчета угла, на интерфейсе отображения.
[0018] Согласно третьему аспекту вариантов осуществления настоящего изобретения представлен терминал, который включает в себя: процессор; и запоминающее устройство (ЗУ) для хранения инструкций, исполняемых процессором. Процессор выполнен для: включения камеры и получения изображения объекта с помощью камеры в то время как терминал выполняет компас-приложение; определения фронтального направления камеры с помощью компаса-приложения; и отображения фронтального направления на изображении объекта.
[0019] Некоторые преимущества и полезные эффекты как результат технических решений, обеспеченные вариантами осуществления настоящего изобретения, могут включать в себя следующие.
[0020] В то время как терминал выполняет компас-приложение, включается камера и с помощью камеры получают изображение объекта; с помощью компас-приложения определяется фронтальное направление камеры; и фронтальное направление отображается на изображении объекта. Поэтому фронтальное направление камеры может служить в качестве направления на объект для непосредственного отображения на изображении объекта, так что проблему того, что терминал не может предоставить пользователю направление на изображении объекта, можно решить и, таким образом, достичь эффекта расширения функции измерения направления терминала.
[0021] Следует понимать, что общее описание выше и подробное описание ниже являются только примерными и не ограничивают настоящее изобретение.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
[0022] Сопроводительные чертежи, которые включены в и составляют часть настоящего описания, иллюстрируют варианты осуществления соответственно изобретению и вместе с описанием служат для объяснения принципов изобретения.
[0023] Фиг. 1А - функциональная блок-схема, показывающая способ для измерения направления в соответствии с примером осуществления.
[0024] Фиг. 1В - схематический вид, показывающий фронтальное направление камеры в соответствии с примером осуществления.
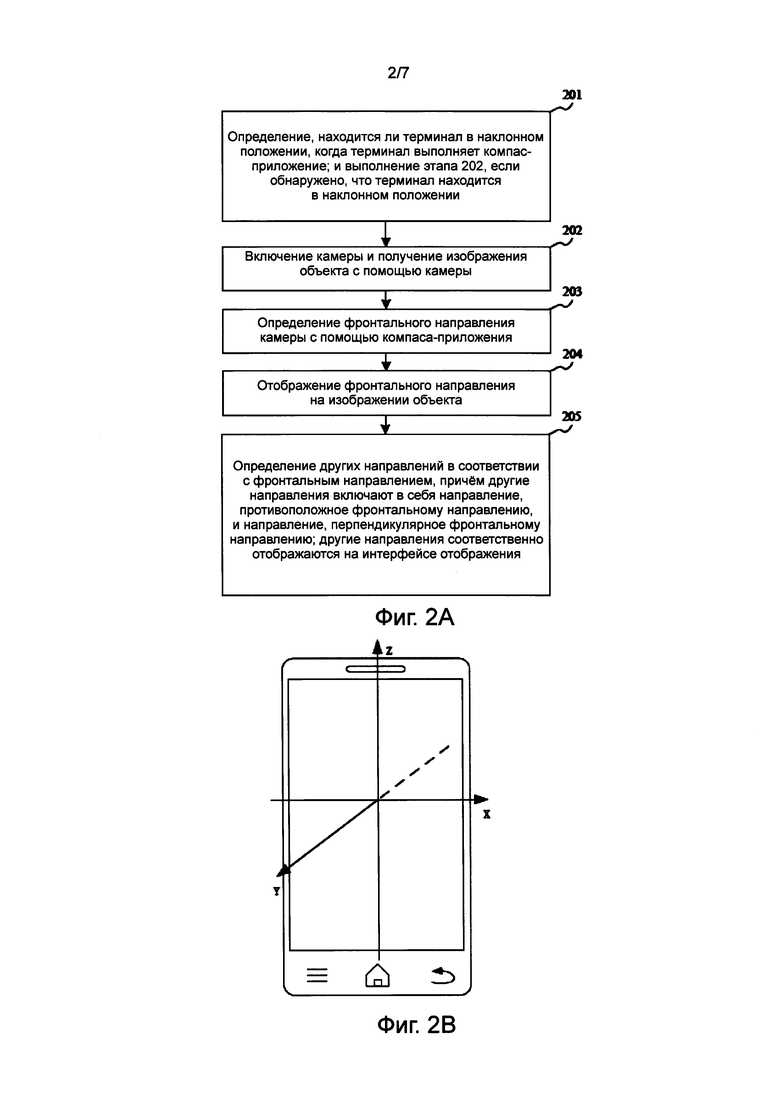
[0025] Фиг. 2А - функциональная блок-схема, показывающая способ для определения направления в соответствии с другим примером осуществления.
[0026] Фиг. 2В - схематический вид, показывающий способ создания системы координат в соответствии с примером осуществления.
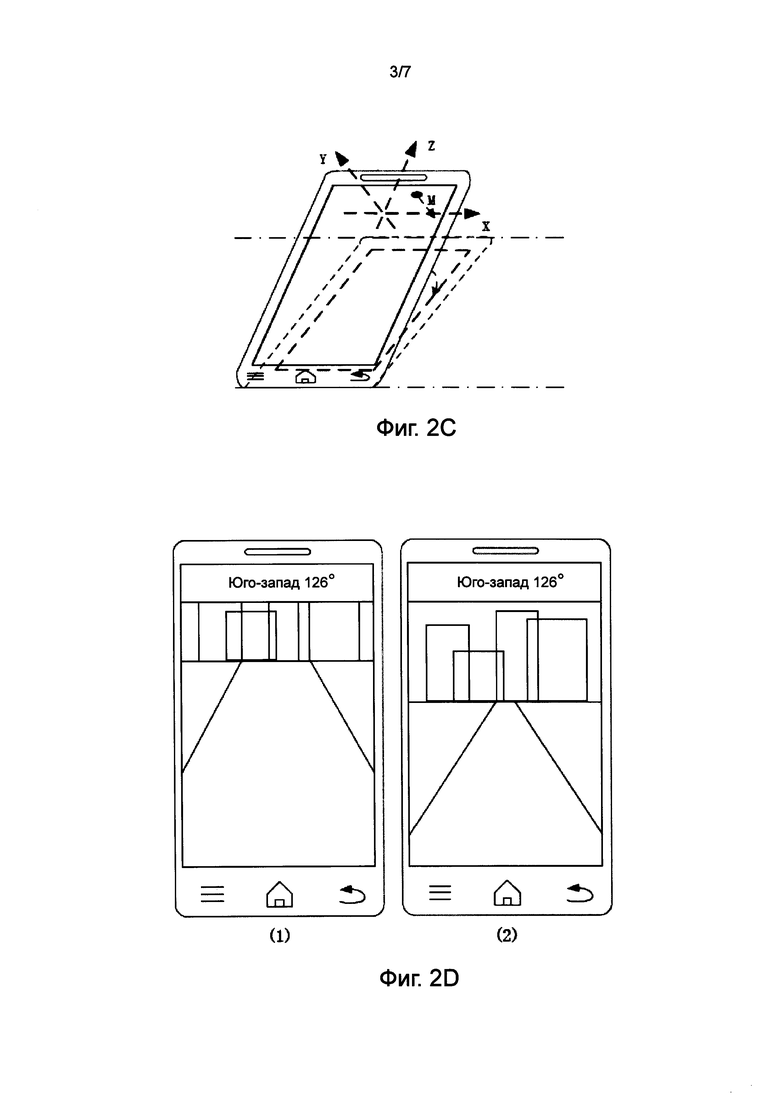
[0027] Фиг. 2С - схематический вид, показывающий фронтальное направление камеры в соответствии с примером осуществления.
[0028] Фиг. 2D - схематический вид, показывающий применение измерения направления в соответствии с примером осуществления.
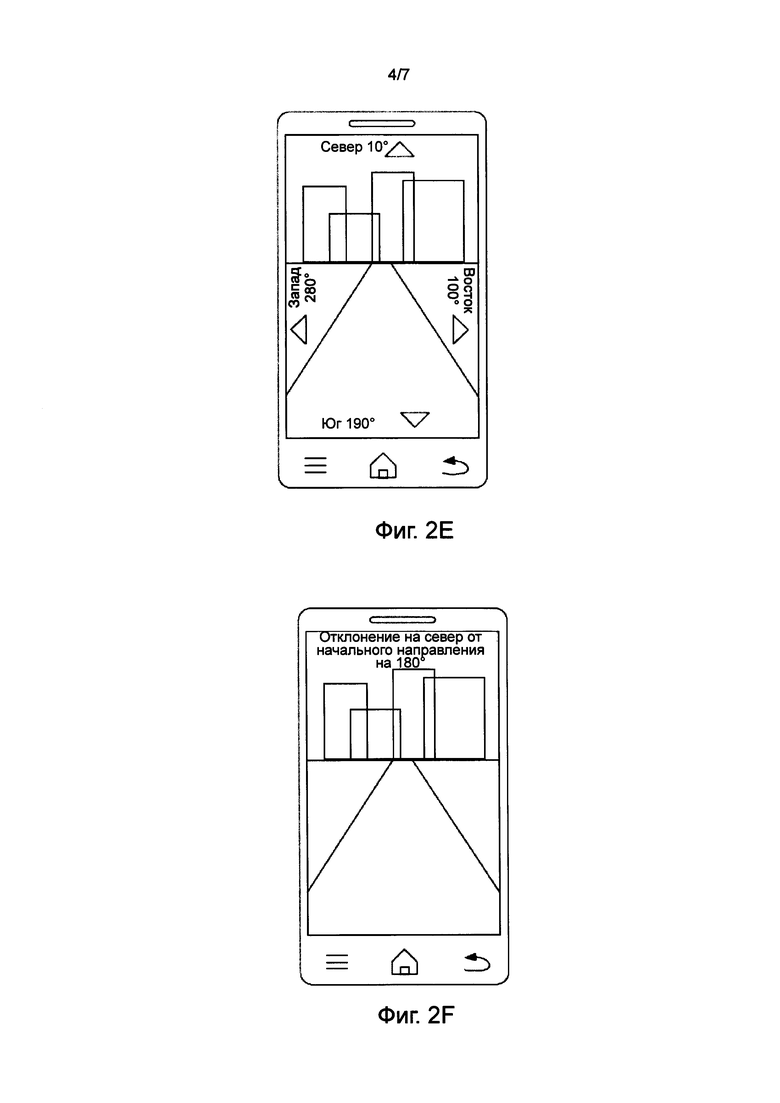
[0029] Фиг. 2Е - схематический вид, показывающий терминал, отображающий направление в соответствии с примером осуществления.
[0030] Фиг. 2F - схематический вид, показывающий применение отклонения направления в соответствии с примером осуществления.
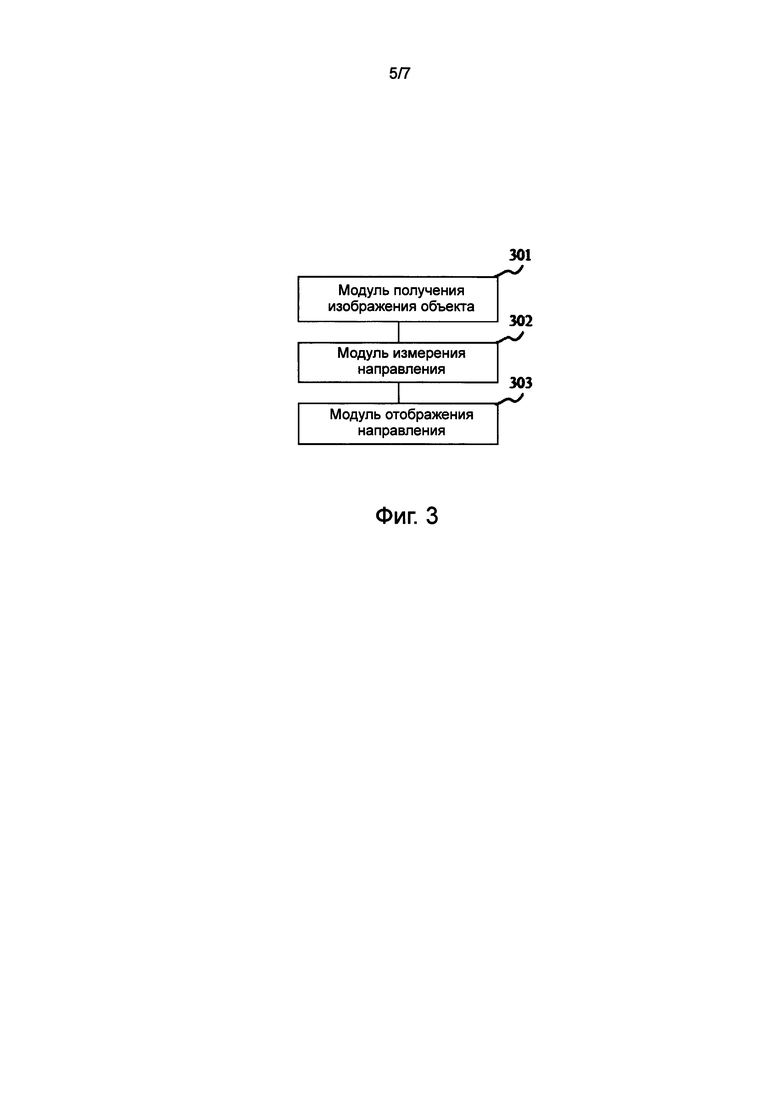
[0031] Фиг. 3 - структурная блок-схема, показывающая аппарат для измерения направления в соответствии с примером осуществления.
[0032] Фиг. 4 - структурная блок-схема, показывающая аппарат для измерения направления в соответствии с примером осуществления.
[0033] Фиг. 5 - структурная блок-схема, показывающая устройство для измерения направления в соответствии с примером осуществления.
ПОДРОБНОЕ ОПИСАНИЕ
[0034] Далее подробно представлены примеры вариантов осуществления, примеры которых проиллюстрированы на сопроводительных чертежах. Следующее описание ссылается на сопроводительные чертежи, на которых одни и те же позиции на разных чертежах представляют одни и те же или одинаковые элементы, если не указано иное. Исполнения, изложенные в нижеследующем описании примеров, не отображают все осуществления в соответствии с изобретением. Наоборот, они являются просто примерами аппаратов и способов согласно аспектам, связанными с изобретением, как изложено в прилагаемой формуле изобретения.
[0035] Фиг. 1А представляет функциональную блок-схему, показывающую способ для измерения направления в соответствии с примером осуществления. Как показано на фиг. 1А ,способ измерения направления можно применять к, но не ограничиваясь этим, терминалу, включающему в себя камеру и компас-приложение, причем способ включает в себя следующие этапы:
[0036] На этапе 101, в то время как терминал выполняет компас-приложение, происходит включение камеры и получают с помощью камеры изображения объекта.
[0037] В процессе, когда терминал выполняет компас-приложение, терминал включает камеру, и текущее изображение объекта фотографируется камерой.
[0038] На этапе 102 определяется фронтальное направление камеры с помощью компаса-приложения.
[0039] Поскольку камера установлена на терминале, и компас-приложение может определять все направления терминала, фронтальное направление камеры можно определить в соответствии с измеренным направлением терминала с помощью компаса-приложения.
[0040] Фиг. 1В представляет схематический вид, показывающий фронтальное направление камеры в соответствии с примером осуществления. Фиг. 1В (1) - схематический вид, показывающий фронтальное направление камеры, например, в мобильном телефоне, в котором направление чтения является вертикальным; и фиг. 1В (2) - схематический вид, показывающий фронтальное направление камеры, например, в планшете, в котором направление чтения является горизонтальным. На фиг. 1В небольшое пятно на задней стороне терминала - это камера, а фронтальное направление совпадает с фронтальным направлением терминала, т.е. направление, располагающееся перпендикулярно от передней стороны терминала к задней стороне терминала.
[0041] На этапе 103 фронтальное направление отображается на изображении объекта.
[0042] Объект находится перед камерой, поэтому фронтальное направление камеры, измеренное с помощью компаса-приложения, является целевым направлением на объект, и на изображении объекта отображается фронтальное направление, то есть пользователю предоставляется направление на объект.
[0043] Соответственно, с помощью способа определения направления, предоставленного настоящим изобретением, в то время как терминал выполняет компас-приложение, происходит включение камеры и получение изображения объекта с помощью камеры; с помощью компаса-приложения определяется фронтальное направление камеры, и фронтальное направление отображается на изображении фронтальное. Поэтому, фронтальное направление камеры может служить направлением на объект для непосредственного отображения на изображении объекта, так что проблему того, что терминал не может предоставить пользователю направление на изображении объекта, можно решить и, таким образом, достичь эффекта расширения функции измерения направления терминала.
[0044] Фиг. 2А представляет функциональную блок-схему, показывающую способ для измерения направления в соответствии с другим примером варианта осуществления. Как показано на фиг. 2А, способ измерения направления можно применять, но не ограничиваясь этим, к терминалу, включающему в себя камеру и компас-приложение, при этом способ включает в себя следующие этапы.
[0045] На этапе 201 в то время как терминал выполняет компас-приложение, обнаруживается, находится ли терминал в наклонном положении. Если обнаружено, что терминал находится в наклонном положении, процесс измерения переходит к этапу 202.
[0046] Способ измерения направления, представленный вариантами осуществления, как правило, применяется для измерения направления на объект. Поэтому если между терминалом и горизонтальной плоскостью отсутствует прилежащий угол, угол фотосъемки камеры находится перпендикулярно земле, и направление на объект нельзя определить. Поэтому чтобы избежать потери ресурсов, запуская процесс измерения направления в случае, когда терминал не может измерить направление на объект, можно обнаружить, находится ли терминал в наклонном положении. Если терминал находится в наклонном положении, запускается процесс измерения направления, начиная с включения камеры, предварительно установленной в терминале; и если терминал находится в горизонтальном положении, процесс измерения направления не запускается.
[0047] Процесс обнаружения, находится ли терминал в наклонном положении, включает в себя следующее:
[0048] измерение угла наклона между терминалом и горизонтальной плоскостью с помощью датчика направления в терминале;
[0049] обнаружение, попадает ли угол наклона в заданный диапазон углов;
[0050] если обнаруживается, что угол наклона попадает в заданный диапазон углов, то определяется, что терминал находится в наклонном положении.
[0051] При измерении, находится ли терминал в наклонном положении, терминал может запустить предварительно установленный датчик направления, и датчик направления измеряет направление наклона между терминалом и горизонтальной плоскостью. Направление наклона относится к направлению вращения в направлении от нижней стороны или боковой стороны терминала к текущему положению, когда терминал интерфейса обращен лицом вверх и находится параллельно горизонтальной плоскости.
[0052] В этом варианте осуществления датчик направления может быть гироскопическим датчиком и/или датчиком акселерометра. Направление наклона терминала может измерить датчик направления согласно различным хорошо известным методикам, описание которых в настоящем документе не приводится.
[0053] После получения направления наклона, измеренного датчиком направления, терминал может также сравнить направления наклона с заданным диапазоном углов. Если угол наклона попадает в диапазон углов, определяется, что терминал находится в наклонном положении; если угол наклона не попадает в диапазон углов, значит, терминал находится в горизонтальном положении. Например, диапазон углов установлен на (45°, 135°) или изменен на (5°, 175°) и так далее.
[0054] Необходимо отметить, что если угол наклона больше, чем предварительно определенное значение, направление, указанное терминалом, может быть направлением, противоположным фронтальному направлению, а не фронтальным направлением. Поэтому для того чтобы гарантировать точность измерения направления, предварительно определенное значение можно установить в качестве максимального значения диапазона углов.
[0055] На этапе 202 происходит включение камеры и получение изображения объекта с помощью камеры.
[0056] Когда камера включена, она делает фотографии изображения объекта в режиме реального времени и отображает сфотографированное изображение объекта на интерфейсе отображения.
[0057] На этапе 203 определяется фронтальное направление камеры с помощью компаса-приложения.
[0058] Поскольку камера установлена на терминале, и компас-приложение может определять все направления терминала, фронтальное направление камеры можно определить в соответствии с измеренным направлением терминала с помощью компаса-приложения.
[0059] Определение фронтального направления камеры с помощью компаса-приложения включает в себя следующее:
[0060] определение положения терминала, а также каждого направление терминала с помощью компаса-приложения;
[0061] фронтальное направление камеры определяется в соответствии с положением терминала и каждого направления терминала.
[0062] Система координат устанавливается на терминале заранее, поэтому параметры по каждой оси, в то время как терминал находится в текущем положении, можно измерить с помощью датчика направления, и положение терминала может быть определено согласно измеренным параметрам. Варианты осуществления описаны с учетом часто используемого способа создания системы координат на терминале, в котором в качестве примера направление считывания - вертикальное. Интерфейс терминала задается как плоскость xz, где центральная точка терминала - это точка начала системы координат; ось, направленная в левую сторону терминала, - это положительная полуось оси х; ось, перпендикулярная оси x на интерфейсе терминала, - это ось z; ось, направленная в верхнюю часть терминала в плоскости xz, - это положительная полуось оси z; ось, перпендикулярная плоскости отображения, - это ось у; и ось, направленная в верхнюю сторону терминала за пределами плоскости xz, - это положительная полуось оси у, ссылаясь на схему на фиг. 2В, которая показывает способ создания показанной системы координат.
[0063] Предполагается, что параметры - это углы, которые соответственно вращаются вокруг каждой из осей соответственно; тогда первый параметр терминала, вращающийся вокруг оси х, второй параметр, вращающийся вокруг оси у, и третий параметр, вращающийся вокруг оси z, можно измерить с помощью датчика направления, а положение терминала можно определить в соответствии с измеренными трема параметрами. Положение терминала можно измерить с помощью гироскопического датчика, а также с помощью комбинации гироскопического датчика и датчика акселерометра, что не ограничивается вариантами осуществления.
[0064] Компас-приложение измеряет все направления терминала согласно положению терминала. Если камера находится на задней стороне терминала, фронтальное направление камеры, то фронтальное направление камеры - это фронтальное направление терминала; если же камера находится на передней стороне терминала, то фронтальное направление камеры противоположно фронтальному направлению терминала. Фронтальное направление терминала относится к направлению, которое располагается перпендикулярно от передней стороны терминала к задней стороне терминала.
[0065] В случае если интерфейс отображения находится перпендикулярно к горизонтальной плоскости, фронтальное направление камеры может быть как на схематическом виде, показанном на фиг. 1В. Если интерфейс отображения не находится перпендикулярно к горизонтальной плоскости, фронтальное направление камеры может быть как на схематическом виде, показанном на фиг. 2С. На фиг. 2С установленная система терминала координат представлена осью X, осью Y и осью Z, фронтальное направление камеры представлено стрелкой М, которая располагается параллельно оси Y и в направлении, противоположном от направления оси Y.
[0066] Если требуется, для того чтобы пользователь знал направление вращения при повороте терминала, датчик направления может определить фронтальное направление камеры каждого заранее определенного интервала. Например, если предполагается, что терминал вращается против часовой стрелки из горизонтального положения вокруг нижней части, фиг. 2D представляет схематический вид, который показывает применение измерения направления согласно варианту осуществления. Фиг.2D (1) показывает интерфейс отображения в случае, если угол вращения относительно небольшой, а Фиг. 2D (2) показывает интерфейс отображения в случае, если угол вращения относительно большой.
[0067] На этапе 204 фронтальное направление отображается на изображении объекта.
[0068] Объект находится перед камерой, поэтому фронтальное направление камеры, измеренное с помощью компаса-приложения, является направлением на объект, то есть пользователю предоставляется направление на объект.
[0069] Терминал может отображать измеренное фронтальное направление камеры на изображении объекта в режиме реального времени. Терминал может отображать фронтальное направление на изображении объекта в виде указателя или предпочтительно может отображать фронтальное направление в виде цифры, чтобы повысить точность в указании направления.
[0070] На этапе 205 другие направления определяются в соответствии с фронтальным направлением, причем другие направления включают в себя направление, противоположное фронтальному направлению, и направление, перпендикулярное фронтальному направлению; и другие направления отображаются соответственно на интерфейсе отображения.
[0071] Терминал может рассчитать направление, противоположное фронтальному направлению, и направление, перпендикулярное фронтальному направлению согласно фронтальному направлению камеры, и отображает вычисленные направления в соответствующих местах на интерфейсе отображения.
[0072] Фиг. 2Е представляет схематический вид, показывающий терминал, отображающий направление в соответствии с вариантом осуществления. Если компас-приложение измерит, что фронтальное направление камеры - это «10° на север» и показывает «10° на север» в верхней стороне интерфейса отображения, направление «10° на север» вращается по часовой стрелке на 90 градусов и получается направление «100° на восток», перпендикулярное направлению «10° на север», и отображается в правой стороне интерфейса отображения; направление «10° на север» вращается по часовой стрелке на 180 градусов и получается направление «190° на юг», противоположное направлению «10° на север», которое отображается в нижней стороне интерфейса отображения; и направление «10° на север» вращается по часовой стрелке на 270 градусов и получается направление «280° на запад», перпендикулярное направлению «10° на север», которое отображается в левой стороне интерфейса отображения.
[0073] Необходимо отметить, что способ также включает в себя следующее:
[0074] задается предварительно опорное направление;
[0075] рассчитывается угол отклонения фронтального направления по отношению к опорному направлению;
[0076] угол отклонения отображается в интерфейсе отображения.
[0077] Опорный угол можно задавать и изменять. Например, начальное направление - «0° на север» или начальное направление «130° на юго-восток».
[0078] Фиг. 2F представляет схематический вид, показывающий применение отклонения направления в соответствии с вариантом осуществления. Предустановленное опорное направление - «0° на север». Если предположить, что фронтальное направление, измеренное терминалом - это «180° на юг», рассчитанный угол отклонения равен 180°, на интерфейсе отображения появляется подсказка «отклонение на север от начального направления на 180°», чтобы указать, что объект отклоняется по отношению к опорному направлению.
[0079] Соответственно, по способу определения направления, предоставленного настоящим изобретением, в то время как терминал выполняет компас-приложение, происходит включение камеры и получение изображение объекта с помощью камеры; с помощью компаса-приложения определяется фронтальное направление камеры; и фронтальное направление отображается на изображении объекта. Поэтому фронтальное направление камеры может служить направлением на объект для непосредственного отображения на изображении объекта, так что проблему того, что терминал не может предоставить пользователю направление на изображении объекта, можно решить и, таким образом, достичь эффекта расширения функции измерения направления терминала.
[0080] Кроме того, путем предварительной установки опорного направления, расчета угла отклонения фронтального направления по отношению к опорному направлению и отображения угла отклонения на интерфейсе отображения можно определить направление на объект на изображении объекта согласно заданному опорному направлению и отображаемому углу отклонения, чтобы достичь эффекта дальнейшего расширения функции измерения направления терминала.
[0081] Фиг. 3 представляет структурную блок-схему, показывающую аппарат для измерения направления в соответствии с примером варианта осуществления. Как показано на фиг. 3, аппарат для измерения направления можно применять, но не ограничиваясь этим, к терминалу, включающему в себя камеру и компас-приложение. Аппарат включает в себя: модуль 301 получения изображения объекта, модуль 302 измерения направления и модуль 303 отображения направления.
[0082] Модуль 301 получения изображения объекта выполнен для включения камеры и получения изображения объекта с помощью камеры в то время как терминал выполняет компас-приложение.
[0083] Модуль 302 измерения направления выполнен для определения фронтального направления камеры с помощью компаса-приложения.
[0084] Модуль 303 отображения направления выполнен для отображения фронтального направления, измеренного модулем 302 измерения направления, на изображении объекта, полученном через модуль 301 получения изображения объекта.
[0085] Соответственно, с помощью аппарата для измерения направления, предоставленного настоящим изобретением, в то время как терминал выполняет компас-приложение, происходит включение камеры и получение изображения объекта с помощью камеры; с помощью компаса-приложения определяется фронтальное направление камеры; и фронтальное направление отображается на изображении объекта. Поэтому фронтальное направление камеры может служить направлением на объект для непосредственного отображения на изображении объекта, так что проблему того, что терминал не может предоставить пользователю направление на изображении объекта, можно решить и, таким образом, достичь эффекта расширения функции измерения направления терминала.
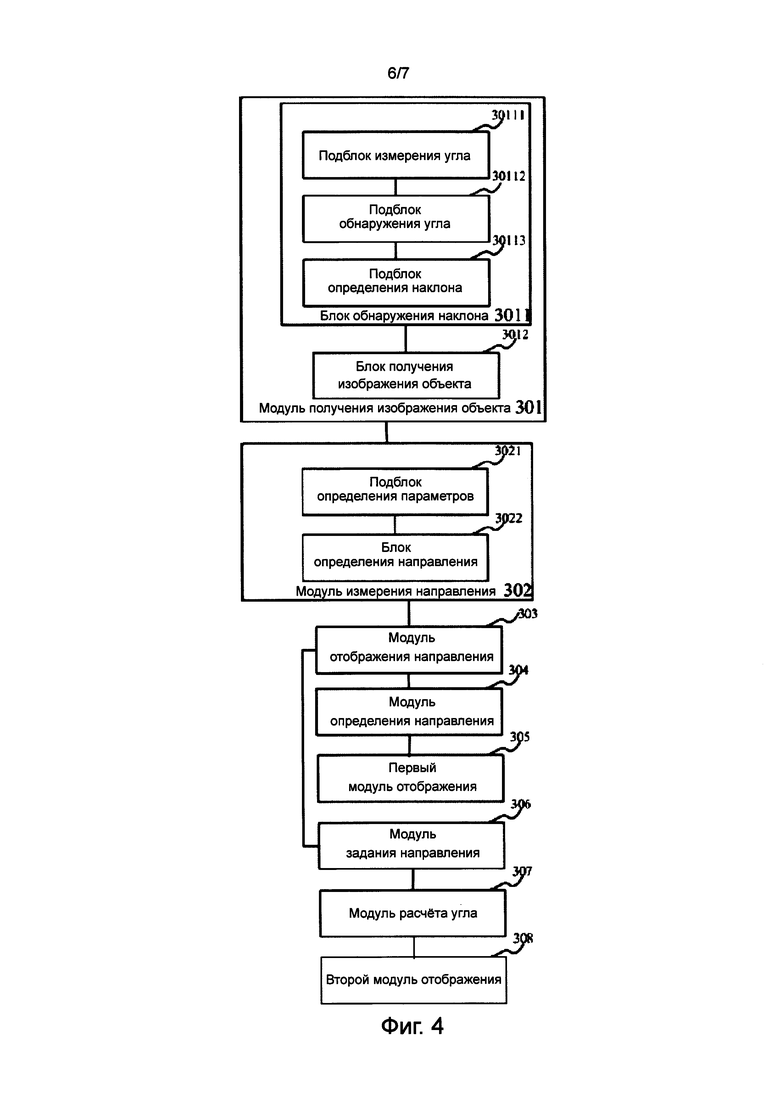
[0086] Фиг. 4 представляет структурную блок-схему, показывающую аппарат для измерения направления в соответствии с примером варианта осуществления. Как показано на фиг. 4, аппарат для измерения направления можно применять, но не ограничиваясь этим, к терминалу, включающую в себя камеру и компас-приложение. Аппарат включает в себя: модуль 301 получения изображения объекта, модуль 302 измерения направления и модуль 303 отображения направления.
[0087] Модуль 301 получения изображения объекта выполнен для включения камеры и получения изображения объекта с ее помощью в то время как на терминале работает компас-приложение.
[0088] Модуль 302 измерения направления выполнен для определения фронтального направления камеры с помощью компаса-приложения.
[0089] Модуль 303 отображения направления выполнен для отображения фронтального направления, измеренного модулем 302 измерения направления, на изображении объекта, полученном через модуль 301 получения изображения объекта.
[0090] Если требуется, модуль 301 получения изображения объекта включает в себя: блок 3011 обнаружения наклона и блок 3012 получения изображения объекта.
[0091] Блок 3011 обнаружения наклона выполнен для определения, находится ли терминал в наклонном положении в то время, как терминал выполняет компас-приложение.
[0092] Блок 3012 получения изображения объекта выполнен для включения камеры и получения изображение объекта с помощью камеры, если блок обнаружения наклона обнаружит, что терминал находится в наклонном положении.
[0093] Если требуется, блок 3011 обнаружения наклона включает в себя: подблок 30111 измерения угла, подблок 30112 обнаружения угла и подблок 30113 определения наклона.
[0094] Подблок 30111 измерения угла выполнен для измерения угла наклона между терминалом и горизонтальной плоскостью с помощью датчика направления на терминале.
[0095] Подблок 30112 обнаружения угла выполнен для обнаружения, попадает ли угол наклона, обнаруженный подблоком 30111 измерения угла, в заданный диапазон углов.
[0096] Подблок 30113 определения наклона выполнен для определения, что терминал находится в наклонном положении, если подблок 30112 обнаружения угла обнаруживает, что угол наклона попадает в заданный диапазон углов.
[0097] Если требуется, модуль 302 определения направления включает в себя: блок 3021 определения параметров и блок 3022 измерения направления.
[0098] Блок 3021 определения параметров выполнен для определения положения терминала и для определения каждого направления терминала с помощью компаса-приложения.
[0099] Блок 3022 измерения направления выполнен для определения фронтального направления камеры в соответствии с положением терминала и каждого направления терминала, определенного блоком 3021 определения параметров.
[0100] Если требуется, аппарат также включает в себя: модуль 304 определение направления и первый модуль 305 отображения.
[0101] Модуль 304 определения направления выполнен для определения других направлений в соответствии с фронтальным направлением, при этом другие направления включают в себя направление, противоположное фронтальному направлению, и направление, перпендикулярное фронтальному направлению.
[0102] Первый 305 модуль отображения выполнен для отображения других направлений соответственно на интерфейсе отображения.
[0103] Если требуется, аппарат также включает в себя: модуль 306 задания направления, модуль 307 расчета угла и второй модуль 308 отображения.
[0104] Модуль 306 задания направления выполнен для предварительного задания опорного направления.
[0105] Модуль 307 расчета угла выполнен для вычисления угла отклонения фронтального направления относительно опорного направления.
[0106] Второй 308 модуль отображения выполнен для отображения угла отклонения, рассчитанного модулем 307 расчета угла, на интерфейсе отображения.
[0107] Соответственно, с помощью аппарата для измерения направления, предоставленного настоящим изобретением, в то время как терминал выполняет компас-приложение, происходит включение камеры и получение изображения объекта с помощью камеры; с помощью компаса-приложения определяется фронтальное направление камеры; и фронтальное направление отображается на изображении объекта. Поэтому фронтальное направление камеры может служить направлением га объект для непосредственного отображения на изображении объекта, так что проблему того, что терминал не может предоставить пользователю направление на изображении объекта, можно решить и, таким образом, достичь эффекта расширения функции определения направления терминала.
[0108] Кроме того, путем предварительного задания опорного направления, расчета угла отклонения фронтального направления по отношению к опорному направлению и отображения угла отклонения на интерфейсе отображения можно определить направление на объект на изображении объекта в соответствии с заданным опорным направлением и отображаемым углом отклонения, чтобы достичь эффекта дальнейшего расширения функции измерения направления терминала.
[0109] Что касается аппарата в описанных выше вариантах осуществления, конкретные операции, выполняемые каждым модулем, были подробно описаны в вариантах осуществления, касающихся способа, и поэтому его подробное описание в настоящем документе опускается.
[0110] Терминал также предоставляется примерами вариантов осуществления настоящего изобретения, которые могут осуществлять способ для измерения направления, представленного согласно настоящему изобретению. Терминал включает в себя: процессор и запоминающее устройство для хранения инструкций, исполняемых процессором. Процессор выполнен для включения камеры и получения изображения объекта с помощью камеры в то время, когда терминал выполняет компас-приложение; определения фронтального направления камеры с помощью компаса-приложения; и отображения фронтального направления на изображении объекта.
[0111] Что касается терминала в описанных выше вариантах осуществления, конкретные операции, выполняемые каждым модулем, были подробно описаны в вариантах осуществления, касающихся способа, и поэтому его подробное описание в настоящем документе опускается.
[0112] Фиг. 5 представляет структурную блок-схему, показывающую устройство 500 для измерения направления в соответствии с примерами вариантов вариантом осуществления. Например, устройство 500 может быть мобильным телефоном, компьютером, цифровым широковещательным терминалом, устройством обмена сообщениями, игровой приставкой, планшетом, медицинским устройством, тренажером, КПК и тому подобным.
[0113] Как показано на фиг. 5, устройство 500 может включать в себя один или более из следующих компонентов: блок 502 обработки, блок 504 памяти, блок 506 питания, мультимедийный блок 508, аудио блок 510, интерфейс 512 ввода/вывода, сенсорный блок 514 и компонент 516 связи.
[0114] Блок 502 обработки, как правило, управляет всеми операциями устройства 500, которые связаны с дисплеем, телефонными звонками, передачей данных, работой камеры, а также функциями записи. Блок 502 обработки может включать в себя один или более процессоров 518 для выполнения инструкций по всем или отдельным этапам описанных выше способов. Кроме того, блок 502 обработки может включать один или более модулей, которые обеспечивают взаимодействие между блоком 502 обработки и другими блоками. Например, блок 502 обработки может включать мультимедийный модуль, который способствует взаимодействию между мультимедийным блоком 508 и блоком 502 обработки.
[0115] Блок 504 памяти выполнен для хранения различных типов данных для обеспечения работы устройства 500. Примеры таких данных включают в себя инструкции для любых приложений или способов, которые применяются на устройстве 500: контактные данные, данные телефонной книги, сообщения, фотографии, видео и т.д. Блок 504 памяти может быть реализован с использованием любого типа устройств энергозависимого запоминающего устройства и энергонезависимого запоминающего устройства, или их комбинации, таких как статическое запоминающее устройство с произвольной выборкой (SRAM), электрически стираемое программируемое постоянное запоминающее устройство (EEPROM), стираемое программируемое постоянное запоминающее устройство (EPROM), программируемое постоянное запоминающее устройство (PROM), постоянное запоминающее устройство (ROM), магнитное запоминающее устройство, флэш-память, магнитный или оптический диск.
[0116] Блок 506 питания может включать в себя систему управления питанием, один или более источников питания, а также любые другие компоненты, связанные с генерированием, управлением и распределением питания в устройстве 500.
[0117] Мультимедийный блок 508 включает в себя экран, обеспечивающий выходной интерфейс между устройством 500 и пользователем. В некоторых примерах осуществления экран может включать жидкокристаллический дисплей (ЖКД) и сенсорную панель (СП). Если экран включает в себя сенсорную панель, экран может быть выполнен в виде сенсорного экрана для получения входных сигналов от пользователя. Сенсорная панель включает один или более датчиков касания, чтобы распознавать прикосновения, скольжения и жесты на сенсорной панели. Датчики касания могут не только воспринимать прикосновение или скольжение, но и воспринимать определенный период времени и давления, связанное с прикосновением или скольжением. В некоторых примерах осуществления мультимедийный блок 508 включает фронтальную камеру и/или тыловую камеру. Фронтальная камера и тыловая камера может получать внешние мультимедийные данные во время работы устройства 500, как, например, в режиме фотографирования или в режиме видео. И фронтальная и тыловая камеры могут представлять собой фиксированную систему оптических линз или иметь фокусирование и возможность оптического масштабирования.
[0118] Аудио блок 510 выводит и/или получает аудио сигналы. Например, аудио блок 510 включает в себя микрофон (MIC) с возможностью приема внешнего аудио сигнала во время работы устройства 500, как, например, в режиме вызова, в режиме записи и в режиме распознавания голоса. Далее полученный звуковой сигнал можно сохранить в блоке 504 памяти или передать с помощью блока 516 связи. В некоторых примерах осуществления аудио блок 510 дополнительно включает в себя динамик для вывода аудио сигналов.
[0119] Интерфейс 512 ввода/вывода обеспечивает интерфейс между блоком 502 обработки и модулями интерфейсов периферийных устройств, таких как клавиатура, колесо мышки, кнопки и тому подобное. Кнопки могут включать в себя, но не ограничиваются этим, кнопку возврата в начало, кнопку громкости, кнопку пуска и кнопку блокировки.
[0120] Сенсорный блок 514 включает в себя один или более датчиков для обеспечения оценки состояния различных сторон устройства 500. Например, сенсорный блок 514 может обнаруживать открытое/закрытое состояние устройства 500, относительное расположение блоков, например дисплей и клавиатура устройства 500, изменение положения устройства 500 или блока устройства 500, наличие или отсутствие контакта пользователя с устройством 500, ориентации или ускорение/замедление устройства 500, изменение температуры устройства 500. Сенсорный блок 514 может включать в себя датчик приближения с возможностью обнаружения присутствия близлежащих объектов без какого-либо физического контакта. Сенсорный блок 514 может также включать в себя фоточувствительный элемент, например КМОП или датчик изображения CCD, для использования в приложениях обработки изображений. В некоторых вариантах осуществления сенсорный блок 514 может также включать в себя датчик акселерометра, гироскопический датчик, магнитный датчик, датчик давления или датчик температуры.
[0121] Блок 516 связи обеспечивает связь, проводную или беспроводную, между устройством 500 и другими устройствами. Устройство 500 может иметь доступ к беспроводной сети на основе стандарта связи, как, например, Wi-Fi, 2G или 3G, или их комбинации. В одном примере варианта осуществления блок 516 связи принимает широковещательный сигнал или широковещательную соответствующую информацию от внешней широковещательной системы управления через широковещательный канал. В одном примере варианта осуществления блок 516 связи дополнительно включает в себя модуль радиосвязи на коротком расстоянии (NFC). Например, модуль NFC можно выполнить на основе технологии радиочастотной идентификации (RFID), технологии ассоциации ИК техники передачи данных (IrDA), сверхширокополосной технологии (UWB), технологии Bluetooth (ВТ) и других технологий.
[0122] В вариантах примеров осуществления устройство 500 может быть выполнено на основе одной или более специализированных интегральных схемах (ASIC), цифровых сигнальных процессоров (DSP), устройствах цифровой обработки сигналов (DSPD), программируемых логических устройствах (PLD), матрицах программируемых логических вентилей (FPGA), контроллерах, микроконтроллерах, микропроцессорах или других электронных компонентах для выполнения описанных выше способов.
[0123] В вариантах примеров вариантов осуществления также предусмотрен долговременный машиночитаемый носитель данных, в том числе инструкций, которые включены в блок 504 памяти, выполняются процессором 518 в устройстве 500 для выполнения описанных выше способов. Например, долговременным машиночитаемым носителем информации может быть ROM, RAM, CD-ROM, магнитная лента, гибкий диск, оптическое устройство хранения данных и тому подобное.
[0124] Другие варианты осуществления изобретения будут очевидны для специалистов в данной области из рассмотрения описания и практического использования изобретения, раскрытого в настоящем документе. Настоящая заявка предназначена охватить любые изменения, методы использования или адаптации изобретения, следующие за общими принципами, и в том числе такие отклонения от настоящего изобретения, которые относятся к известной или обычной практике в данной области. Предполагается, что описание и примеры следует рассматривать только как иллюстративные материалы, а истинный объем и сущность настоящего изобретения должны быть указаны в нижеследующей формуле изобретения.
[0125] Следует иметь в виду, что настоящее изобретение не ограничивается точным исполнением, которое было описано выше и показано на прилагаемых чертежах, и что могут проводиться различные модификации и изменения без отступления от объема изобретения. Предполагается, что объем изобретения ограничивается только прилагаемой формулой изобретения.


Изобретение относится к вычислительной техники. Технический результат заключается в избежании траты ресурсов при запуске процедуры определения направления. Устройство включает модуль получения изображения объекта, выполненный для запуска камеры и получения изображения объекта с помощью камеры, когда терминал выполняет компас-приложение, модуль измерения направления, выполненный для определения фронтального направления камеры с помощью компаса-приложения, где модуль получения изображения объекта включает в себя блок обнаружения наклона, выполненный для определения, находится ли терминал в наклонном положении, когда терминал выполняет компас-приложение и блок получения изображения объекта, выполненный для включения камеры и получения изображения объекта с помощью камеры, если блок обнаружения наклона обнаружит, что терминал находится в наклонном положении, и модуль отображения направления, выполненный для отображения фронтального направления, измеренного модулем измерения направления, на изображении объекта, полученном модулем получения изображения объекта. 2 н. и 8. з.п. ф-лы, 11 ил.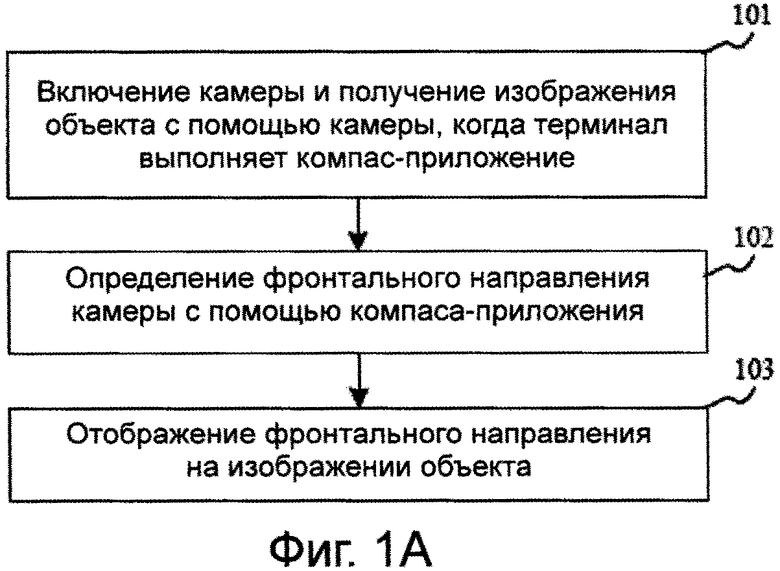
1. Способ определения направления на объект с использованием терминала, содержащего камеру, включающий в себя:
включение камеры и получение изображения объекта с помощью камеры, в то время как терминал выполняет компас-приложение, причем включение камеры содержит шаги:
обнаружение, находится ли терминал в наклонном положении, когда терминал выполняет компас-приложение; и
включение камеры и получение изображения объекта с помощью камеры, только если обнаруживается, что терминал находится в наклонном положении,
определение фронтального направления камеры с помощью компаса-приложения; и
отображение фронтального направления на изображении объекта.
2. Способ по п. 1, отличающийся тем, что обнаружение, находится ли терминал в наклонном положении, включает в себя:
измерение угла наклона между терминалом и горизонтальной плоскостью;
обнаружение, попадает ли угол наклона в заданный диапазон углов; и
определение, что терминал находится в наклонном положении, если обнаруживается, что угол наклона попадает в заданный диапазон углов.
3. Способ по п. 1, отличающийся тем, что определение фронтального направления камеры с помощью компаса-приложения включает в себя:
определение положения терминала;
определение каждого направления терминала с помощью компаса-приложения; и
определение фронтального направления камеры согласно положению терминала и каждому из направлений терминала.
4. Способ по п. 3, отличающийся тем, что также включает в себя:
определение других направлений в соответствии с фронтальным направлением, причем другие направления включают в себя направление, противоположное фронтальному направлению, и направление, перпендикулярное фронтальному направлению; и
соответствующее отображение других направлений на интерфейсе отображения.
5. Способ по любому из пп. 1-4, отличающийся тем, что также включает в себя
предварительное задание опорного направления;
расчет угла отклонения фронтального направления по отношению к опорному направлению; и
отображение угла отклонения на интерфейсе отображения.
6. Аппарат для определения направления на объект, включающий в себя:
модуль получения изображения объекта, выполненный для запуска камеры и получения изображения объекта с помощью камеры, когда терминал выполняет компас-приложение;
модуль измерения направления, выполненный для определения фронтального направления камеры с помощью компаса-приложения, где модуль получения изображения объекта включает в себя:
блок обнаружения наклона, выполненный для определения, находится ли терминал в наклонном положении, когда терминал выполняет компас-приложение; и
блок получения изображения объекта, выполненный для включения камеры и получения изображения объекта с помощью камеры, если блок обнаружения наклона обнаружит, что терминал находится в наклонном положении; и
модуль отображения направления, выполненный для отображения фронтального направления, измеренного модулем измерения направления, на изображении объекта, полученном модулем получения изображения объекта.
7. Аппарат по п. 6, отличающийся тем, что блок обнаружения наклона включает в себя:
подблок измерения угла, выполненный для измерения угла наклона между терминалом и горизонтальной плоскостью с помощью датчика направления в терминале;
подблок обнаружения угла, выполненный для обнаружения, попадает ли угол наклона, обнаруженный подблоком измерения угла, в заданный диапазон углов; и
подблок определения наклона, выполненный для определения, что терминал находится в наклонном положении, если элемент обнаружения угла обнаруживает, что угол наклона попадает в заданный диапазон углов.
8. Аппарат по п. 6, отличающийся тем, что модуль измерения направления включает в себя:
блок определения параметров, выполненный для определения положения терминала и определения каждого направления терминала с помощью компаса-приложения; и
блок измерения направления, выполненный для определения фронтального направления камеры в соответствии с положением терминала и каждого направления терминала, определенного блоком определения параметров.
9. Аппарат по п. 8, отличающийся тем, что также включает в себя
модуль определения направления, выполненный для определения других направлений в соответствии с фронтальным направлением, причем другие направления включают в себя направление, противоположное фронтальному направлению, и направление, перпендикулярное фронтальному направлению; и
первый модуль отображения, выполненный для отображения других направлений соответственно на интерфейсе отображения.
10. Аппарат по любому из пп. 6-9, отличающийся тем, что также включает в себя
модуль задания направления для предварительного задания опорного направления;
модуль расчета угла, выполненный для вычисления угла отклонения фронтального направления относительно опорного направления; и
второй модуль отображения, выполненный для отображения угла отклонения, рассчитанного модулем расчета угла, на интерфейсе отображения.
| Приспособление для суммирования отрезков прямых линий | 1923 |
|
SU2010A1 |
| Способ приготовления лака | 1924 |
|
SU2011A1 |
| Многоступенчатая активно-реактивная турбина | 1924 |
|
SU2013A1 |
| МНОГОФУНКЦИОНАЛЬНЫЙ МОБИЛЬНЫЙ КОМПЛЕКС ОБЕСПЕЧЕНИЯ ПОТРЕБИТЕЛЕЙ МОНИТОРИНГОВОЙ ИНФОРМАЦИЕЙ (МКОПМИ) | 2011 |
|
RU2475968C1 |

