[0001] Настоящая заявка основана на заявке на патент Китая №201410225638, поданной 26 мая 2014 г., и испрашивает приоритет в соответствии с этой заявкой, все содержание которой включено в настоящий документ посредством ссылки.
ОБЛАСТЬ ТЕХНИКИ, К КОТОРОЙ ОТНОСИТСЯ ИЗОБРЕТЕНИЕ
[0002] Настоящее изобретение в целом относится к области вычислительной техники и, в частности, к способу, аппарату и терминалу для измерения угла.
УРОВЕНЬ ТЕХНИКИ
[0003] С развитием технологии создания терминалов, терминалы, как правило, имеют все более разнообразные функции. Например, уклономер-приложение (упоминается как приложение) можно установить на терминале для определения уровня его наклона.
[0004] В известном уровне техники, если угол между терминалом и горизонтальной плоскостью измеряет уклономер-приложение, установленное уклономер-приложение запускается терминалом, а интерфейс измерения, который обеспечивает уклономер-приложение, отображается на интерфейсе терминала. Например, интерфейс измерения включает в себя жидкость и пузырьки, которые помещены в контейнер, и при повороте терминала пузырьки поворачиваются вместе с ним. Угол между терминалом и горизонтальной плоскостью будет равен 0, если пузырьки располагаются в центре контейнера.
[0005] В процессе реализации данного изобретения изобретателем обнаружил следующие недостатки в предшествующем уровне техники: уклономер-приложение может измерять только уровень наклона терминала, т.е. функции измерения угла терминала является однообразной.
[0006]
СУЩНОСТЬ ИЗОБРЕТЕНИЯ
[0007] Чтобы решить эту проблему в известном уровне техники, настоящим изобретением предлагаются способ и аппарат для измерения угла, а также терминал.
[0008] Согласно первому аспекту вариантов осуществления настоящего изобретения предложен способ измерения угла, включающий в себя: горизонтальную линию начала отсчета и линию измерения, а также объект, фотографируемый в этот момент камерой, отображаемый в интерфейсе терминала, плоскость, определенная линией измерения и горизонтальной линией начала отсчета, параллельной интерфейсу отображения, и линию измерения, являющейся относительно статичной по отношению к интерфейса отображения; при этом в ходе процесса терминал поворачивается так, чтобы край объекта был параллелен линии измерения, вычисляется угол между линией измерения и горизонтальной линией начала отсчета; таким образом, угол, полученный, когда край стал параллельным линии измерения, определяется как угол между объектом и горизонтальной плоскостью.
[0009] Если требуется, отображение горизонтальной линии начала отсчета и линии измерения, а также объекта, фотографируемого в этот момент камерой, в интерфейсе терминала включающее в себя: обнаружение, расположен ли терминал в наклонном положении, и если обнаружено, что терминал находится в наклонном положении, включается камера, а горизонтальная линия начала отсчета и линия измерения, а также объект, фотографируемый в этот момент камерой, отображаются на терминале.
[0010] Если требуется, обнаружение того, находится ли терминал в наклонном положении, включающее в себя: измерение угла наклона между терминалом и горизонтальной плоскостью; обнаружение, попадает ли угол наклона в заданный диапазон углов; и если обнаружено, что угол наклона попадает в заданный диапазон углов, значит, терминал находится в наклонном положении.
[0011] Если требуется, когда в ходе процесса терминал поворачивается так, что край объекта находится параллельно линии измерения, вычисление угла между линией измерения и горизонтальной линией начала отсчета, включающее в себя: если линии измерения параллельна или совпадает с горизонтальной линией начала отсчета в начальный момент, измеряется угол поворота линии измерения относительно горизонтальной линии начала отсчета, и угол поворота является углом между линией измерения и горизонтальной линией начала отсчета; а если между линией измерения и горизонтальной линией начала отсчета в начальный момент есть начальный угол, измеряется угол поворота линии измерения относительно горизонтальной линии начала отсчета, при этом рассчитывается угловая разница путем вычитания значения начального угла от угла поворота, и угловая разница является углом между линией измерения и горизонтальной линией начала отсчета.
[0012] Если требуется, способ дополнительно включает в себя: если камера фотографирует другой объект, в ходе процесса терминал поворачивается так, чтобы край другого объекта был параллельным линии измерения, вычисляется угол между линией измерения и горизонтальной линией начала отсчета; угол, который получается, если край другого объекта параллелен линии измерения, является углом между другим объектом и горизонтальной плоскостью; рассчитывается значение угловой разницы путем вычитания угла между другим объектом и горизонтальной плоскостью из угла между объектом и горизонтальной плоскостью; и абсолютная величина значения разницы является углом между объектом и другим объектом.
[0013] Согласно второму аспекту вариантов осуществления настоящего изобретения предложен аппарат измерения угла, включающий в себя: модуль отображения, выполненный для отображения горизонтальной линии начала отсчета и линии измерения, а также объекта, фотографируемого в этот момент камерой, в интерфейсе терминала, плоскость, определенную линией измерения и горизонтальной линией начала отсчета параллельной интерфейсу отображения, где линия измерения является относительно статичной по отношению к интерфейсу отображения; первый расчетный модуль, выполненный для вычисления угла между линией измерения и горизонтальной линией начала отсчета в ходе процесса поворота терминала так, чтобы край объекта был параллельным линии измерения; и первый модуль определения для определения угла, полученного первым расчетным модулем, когда край размещен параллельно линии измерения, который и является углом между объектом и горизонтальной плоскостью.
[0014] Если требуется, модуль отображения включает в себя: блок обнаружения, выполненный для обнаружения, находится ли терминал в наклонном положении; и блок отображения, выполненный для включения камеры, если блок обнаружения обнаружит, что терминал находится в наклонном положении, и отображать горизонтальную линию начала отсчета и линию измерения, а также объект, фотографируемый в этот момент камерой, на терминале.
[0015] Если требуется, блок обнаружения включает в себя: измерительный элемент, выполненный для измерения угла наклона между терминалом и горизонтальной плоскостью; подблок обнаружения, выполненный для обнаружения, попадает ли угол наклона, обнаруженный подблоком обнаружения, в заданный диапазон углов; подблок определения, выполненный для определения, находится ли терминал в наклонном положении, если обнаружено, что угол наклона попадает в заданный диапазон углов.
[0016] Если требуется, первый расчетный модуль включает в себя: расчетный блок для измерения угла поворота линии измерения относительно горизонтальной линии начала отсчета, а также для определения угла поворота между линией измерения и горизонтальной линией начала отсчета, если линия измерения параллельна или совпадает с горизонтальной линией начала отсчета в начальный момент; и определение угла поворота как угла между линией измерения и горизонтальной линией начала отсчета, и второй расчетный блок, выполненный для измерения угла поворота линии измерения по отношению к горизонтальной линии начала отсчета, расчета угловой разницы путем вычитания значения начального угла от угла поворота, и определения угловой разницы как угла между линией измерения и горизонтальной линией начала отсчета, если есть начальный угол между линией измерения и горизонтальной линией начала отсчета в начальный момент времени
[0017] Если требуется, аппарат дополнительно включает в себя: второй расчетный модуль, выполненный для расчета угла между линией измерения и горизонтальной линией начала отсчета, если камера фотографирует другой объект, а терминал в ходе процесса поворачивается так, что край другого объекта становится параллельным линии измерения; второй модуль определения, выполненный для определения угла, полученный вторым расчетным модулем, когда край другого объекта параллелен линии измерения, как угла между другим объектом и горизонтальной плоскостью; третий расчетный модуль, выполненный для расчета значения угловой разницы путем вычитания угла между другим объектом и горизонтальной плоскостью из угла между объектом и горизонтальной плоскостью; третий модуль определения для определения значения абсолютной величины значения угловой разницы между объектом и другим объектом.
[0018] Согласно третьему аспекту вариантов осуществления настоящего изобретения, предлагается терминал, который включает в себя: процессор; и память конфигурированная для хранения команд, исполняемых процессором. Процессор конфигурирован для: отображения горизонтальной линии начала отсчета и линии измерения, а также объекта, фотографируемого в данный момент камерой, в интерфейсе терминала, плоскость, определяемую линией измерения и горизонтальной линией начала отсчета параллельно с интерфейсом отображения, и линию измерения, которая является относительно статичной по отношению к интерфейсу отображения; для расчета угла между линией измерения и горизонтальной линией начала отсчета во время поворота терминала так, чтобы край объекта стал параллельным линии измерения; и определения угла, полученного, когда край был параллелен линии измерения в качестве угла между объектом и горизонтальной плоскостью.
[0019] Некоторые преимущества, как результат технических решений, предусмотренные в вариантах осуществления настоящего изобретения, могут включать в себя следующие.
[0020] Горизонтальная линия начала отсчета и линия измерения, а также объект, фотографируемый в данный момент камерой, отображаются в интерфейсе терминала, при этом плоскость, определяемая линией измерения и горизонтальной линией начала отсчета параллельна интерфейсу отображения, а линия измерения является относительно статичной по отношению к интерфейсу отображения; в ходе процесса терминал поворачивается так, чтобы край объекта был параллельным линии измерения, и вычисляется угол между линией измерения и горизонтальной линией начала отсчета; и угол, полученный, когда край параллелен линии измерения, определяется как угол между объектом и горизонтальной плоскостью. Поэтому, если линия измерения на самом деле находится параллельно краю объекта, то терминал может измерить угол между объектом и горизонтальной плоскостью, так что проблему однообразности функции терминала по измерению угла можно разрешить, и, таким образом, достигается эффект расширения функции измерения угла терминала.
[0021] Необходимо понимать, что, общее описание выше и подробное описание ниже являются только примерными и не ограничивают настоящее изобретение.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
[0001] Сопроводительные чертежи, которые включены в настоящую заявку и составляют ее часть, иллюстрируют варианты, предусмотренные изобретением, и вместе с описанием служат для объяснения его принципов.
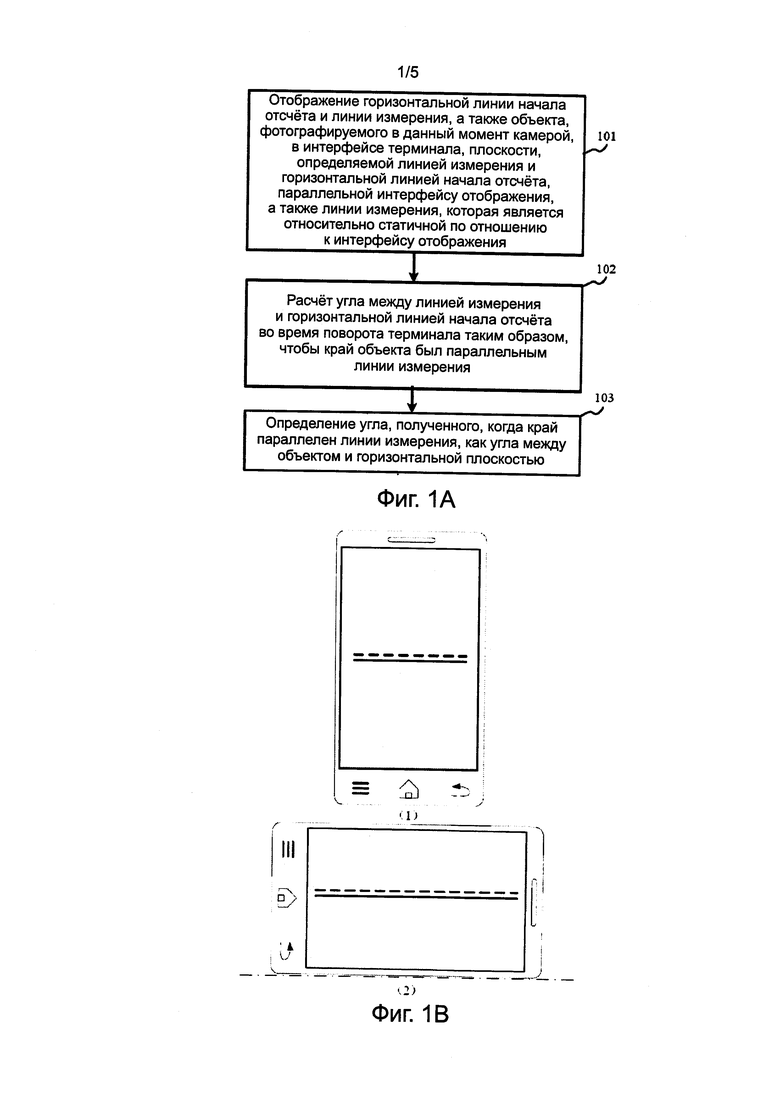
[0002] Фиг. 1А - функциональная блок-схема, показывающая способ для измерения угла в соответствии с примером осуществления.
[0003] Фиг. 1В - схематический вид, показывающий первую горизонтальную линию начала отсчета и первую линию измерения в соответствии с вариантом осуществления.
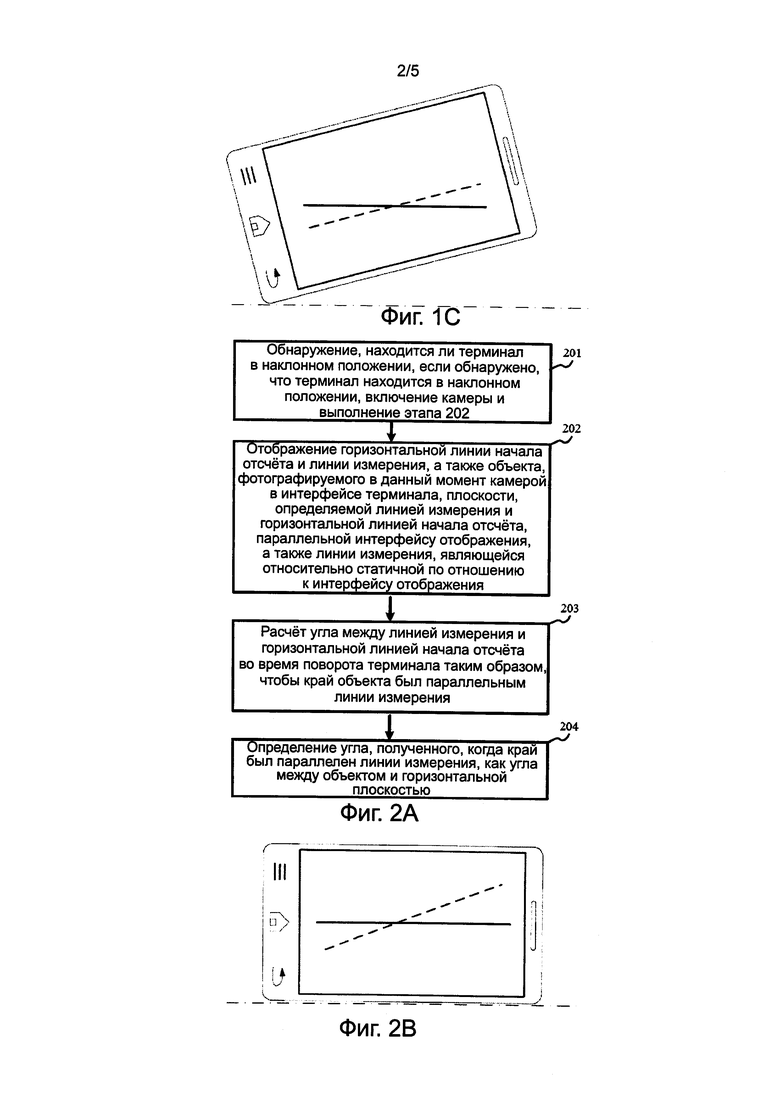
[0004] Фиг. 1С - схематический вид, показывающий вторую горизонтальную линию начала отсчета и вторую линию измерения в соответствии с вариантом осуществления.
[0005] Фиг. 2А - функциональная блок-схема, показывающая способ для измерения угла в соответствии с другим примером осуществления.
[0006] Фиг. 2В - схематический вид, показывающий третью горизонтальную линию начала отсчета и третью линию измерения в соответствии с вариантом осуществления.
[0007] Фиг. 2С - схематический вид, показывающий применение измерения углов в соответствии с вариантом осуществления.
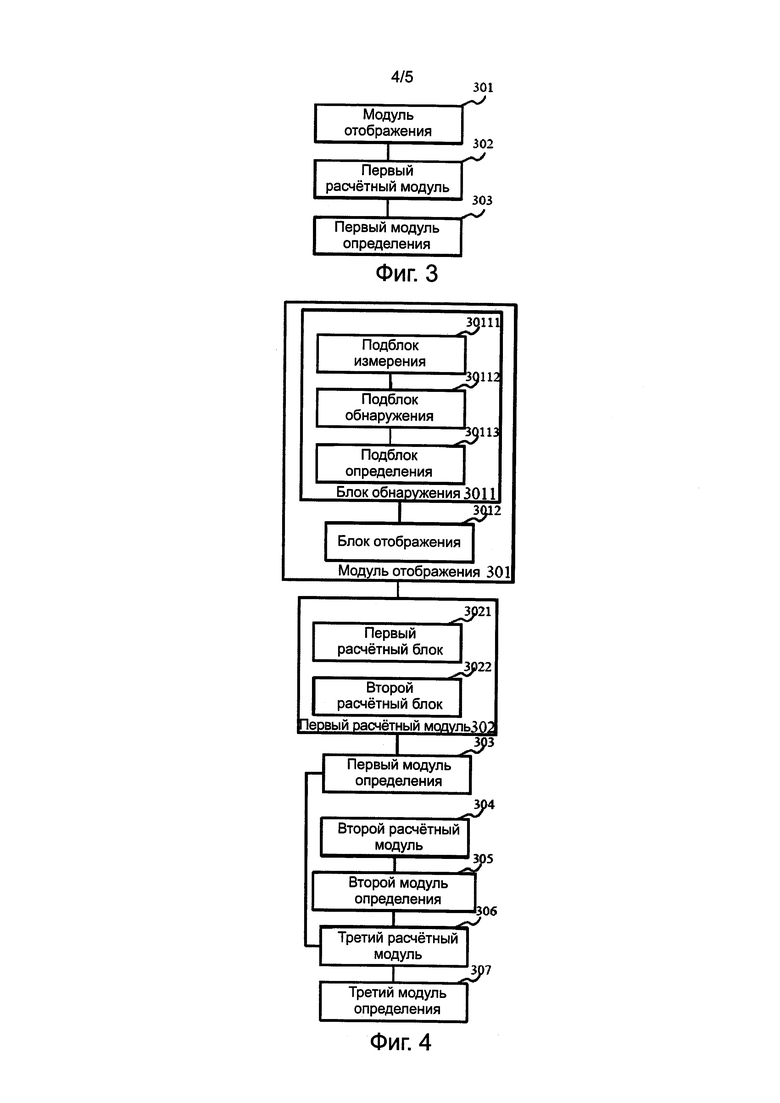
[0008] Фиг. 3 - функциональная блок-схема, показывающая аппарат для измерения угла в соответствии с примером осуществления.
[0009] Фиг. 4 - функциональная блок-схема, показывающая аппарат для измерения угла в соответствии с примером осуществления.
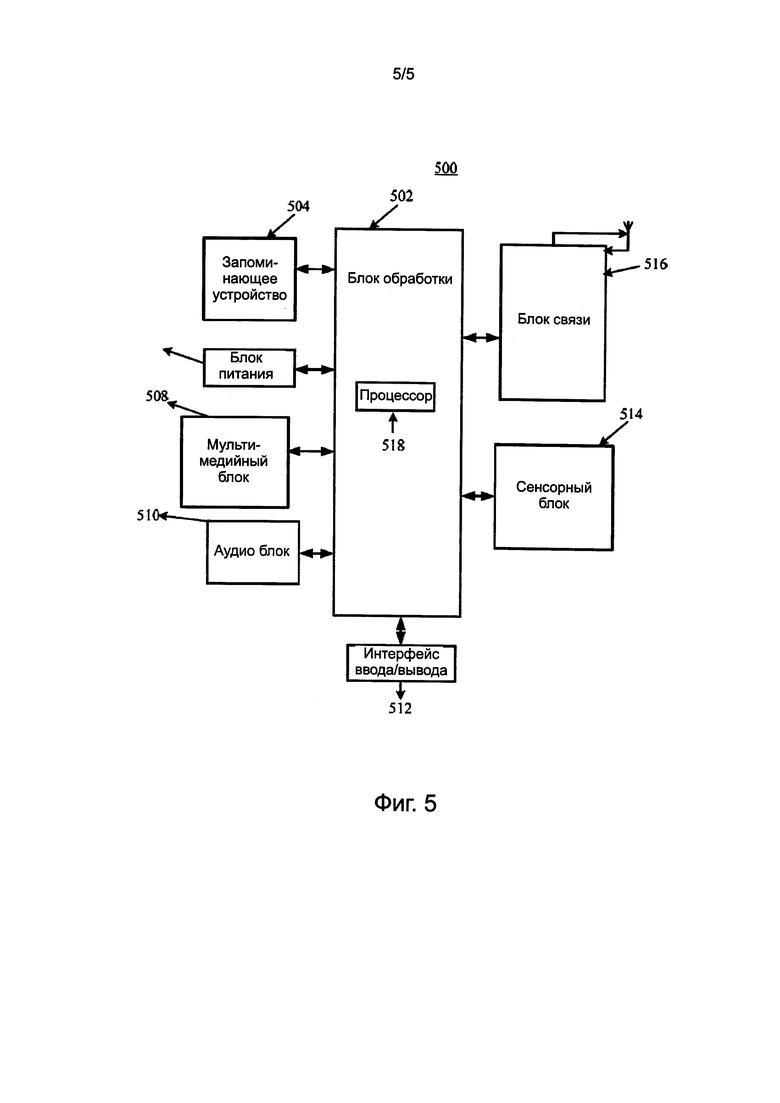
[0010] Фиг. 5 - структурная блок-схема, показывающая устройство для измерения угла в соответствии с примером осуществления.
ПОДРОБНОЕ ОПИСАНИЕ
[0011] Далее приведено подробное описание примеров вариантов осуществления, примеры которых проиллюстрированы на прилагаемых чертежах. Следующее описание относится к сопроводительным чертежам, на которых одни и те же позиции на разных чертежах представляют одни и те же или одинаковые элементы, если не указано иное. Исполнения, изложенные в следующем описании примеров вариантов осуществления, не отображают все исполнения в соответствии с изобретением. Наоборот, они являются просто примерами аппаратов и способов согласно аспектам, связанным с изобретением, как изложено в прилагаемой формуле изобретения.
[0012] Фиг. 1А представляет функциональную блок-схему, показывающую способ для измерения угла в соответствии с примером осуществления. Как показано на фиг. 1А, способ измерения угла можно применять к, но не ограничиваясь этим, терминалу с камерой, и включает в себя следующие этапы.
[0013] На этапе 101 горизонтальная линия начала отсчета и линия измерения, а также объект, фотографируемый в этот момент камерой, отображаются в интерфейсе терминала, плоскость, определенная линией измерения и горизонтальной линии начала отсчета параллельна с интерфейсом отображения, а линия измерения является относительно статичной по отношению к интерфейсу отображения.
[0014] Горизонтальная линия начала отсчета является линией начала отсчета, которая показывает горизонтальное направление, и она всегда находится в горизонтальном положении. Линия измерения предназначена для измерения угла между объектом и горизонтальной плоскостью, и она поворачивается вместе с терминалом. То есть линия измерения является относительно статичной по отношению к интерфейсу отображения.
[0015] Фиг. 1В представляет схематический вид, показывающий первую горизонтальную линию начала отсчета и первую линию измерения в соответствии с вариантом осуществления. На фиг. 1В линия измерения располагается параллельно с длинной стороной терминала. Поскольку длинная сторона терминала располагается параллельно горизонтальной плоскости, а линия измерения параллельна длинной стороне терминала, то линия измерения параллельна горизонтальной линии начала отсчета. В примере осуществления сторона терминала в горизонтальном направлении является длинной стороной терминала. Например, на фиг. 1В (1) показан интерфейс отображения, в котором направление чтения является вертикальным, например, в мобильном телефоне; а на фиг. 1В (2) изображен интерфейс отображения, в котором направление чтения является горизонтальным, например, в планшете. На фиг. 1В сплошная линия обозначает горизонтальную линию начала отсчета, пунктирная линия - линию измерения, а штрихпунктирная линия - горизонтальную плоскость, которая далее не принимается во внимание.
[0016] Фиг. 1С представляет схематический вид, показывающий вторую горизонтальную линию начала отсчета и вторую линию измерения в соответствии с вариантом осуществления. Между длинной стороной терминала и горизонтальной плоскостью есть угол, а линия измерения располагается параллельно длинной стороне терминала, т.е. между линией измерения и горизонтальной линией начала отсчета есть угол.
[0017] На этапе 102 во время поворота терминала так, чтобы край объекта стал параллельным линии измерения, рассчитывается угол между линией измерения и горизонтальной линией начала отсчета.
[0018] Линия измерения является относительно статичной в интерфейсе отображения, а горизонтальная линия начала отсчета сохраняет горизонтальное положение, поэтому при повороте терминала между линией измерения и горизонтальной линией начала отсчета образуется прилежащий угол, который можно измерить.
[0019] На этапе 103 угол, полученный, когда край стал параллельным линии измерения, определяется как угол между объектом и горизонтальной плоскостью.
[0020] Когда линия измерения располагается параллельно краю объекта, угол между линией измерения и горизонтальной линией начала отсчета будет углом между объектом и горизонтальной плоскостью. Таким образом, терминал может определить угол, рассчитанный, когда край объекта находится параллельно линии измерения, как угол между объектом и горизонтальной плоскостью.
[0021] Соответственно, в способе измерения угла, представленном настоящим изобретением, горизонтальная линия начала отсчета и линия измерения, а также объект, фотографируемый в этот момент камерой, отображаются в интерфейсе терминала, при этом плоскость определяется линией измерения и горизонтальной линией начала отсчета, параллельной интерфейсу отображения, и линия измерения является относительно статичной по отношению к интерфейсу отображения; причем во время поворота терминал поворачивается так, чтобы край объекта был параллельным линии измерения, вычисляется угол между линией измерения и горизонтальной линией начала отсчета; и угол, полученный, когда край находится параллельно линии измерения, будет углом между объектом и горизонтальной плоскостью. Поэтому, если линия измерения на самом деле находится параллельно краю объекта, то терминал может измерить угол между объектом и горизонтальной плоскостью, так что проблему однообразности функции терминала по измерению угла можно разрешить, и, таким образом, достичь эффекта расширения функции измерения угла терминала.
[0022] Фиг. 2А представляет функциональную блок-схему, показывающую способ для измерения угла в соответствии с другим примером осуществления. В этом примере осуществления уклономер-приложение используется для измерения угла между терминалом и горизонтальной плоскостью. Как показано на фиг. 2А способ измерения угла можно применять к, но не ограничиваясь этим, терминалу с камерой и уклономер-приложение, включая следующие этапы.
[0023] На этапе 201 обнаруживается, находится ли терминал в наклонном положении. Если обнаружено, что терминал находится в наклонном положении, включается камера и процесс переходит к этапу 202.
[0024] Если между терминалом и горизонтальной плоскостью отсутствует прилежащий угол, то объект, измеряемый терминалом, находится в горизонтальной плоскости. В этот момент угол между объектом и горизонтальной плоскостью равен 0°, поэтому терминалу не нужно измерять угол. Чтобы избежать потери ресурсов, запуская процесс измерения угла в случае, когда измерения угла терминалом не требуется, можно определить, находится ли терминал в наклонном положении. Если терминал находится в наклонном положении, запускается процесс измерения угла, начиная с включения камеры, предварительно установленной в терминале; но, если терминал находится в горизонтальном положении, процесс измерения угла не запускается.
[0025] Процесс обнаружения, находится ли терминал в наклонном положении, включает в себя:
[0026] 1) измерение угла наклона между терминалом и горизонтальной плоскостью.
[0027] 2) обнаружение, попадает ли угол наклона в заданный диапазон углов, и
[0028] 3) если обнаруживается, что угол наклона попадает в заданный диапазон углов, определяется, что терминал находится в наклонном положении.
[0029] При измерении, находится ли терминал в наклонном положении, терминал может запустить предварительно установленное уклономер-приложение, таким образом, уклономер-приложение измеряет угол наклона между терминалом и горизонтальной плоскостью. Угол наклона относится к углу поворота в направлении от нижней стороны или боковой стороны терминала к текущему положению, когда терминал интерфейса обращен вверх и находится параллельно горизонтальной плоскости.
[0030] Угол наклона терминала может измерить уклономер-приложение согласно различным хорошо известным методам, которые в настоящем документе не приводятся.
[0031] После измерения угла наклона с использованием уклономер-приложения терминал может также сравнить угол наклона с заданным диапазоном углов. Если угол наклона попадает в диапазон углов, значит, терминал находится в наклонном положении; если угол наклона не попадает в диапазон углов, значит, терминал находится в горизонтальном положении. Диапазон углов можно задавать и изменять. Например, диапазон углов установлен на (45°, 135°), или изменен на (5°, 175°), и так далее.
[0032] На этапе 202 горизонтальная линия начала отсчета и линия измерение, а также объект, фотографируемый в это момент камерой, отображаются в интерфейсе терминала, при этом плоскость определяется линией измерения и горизонтальной линией начала отсчета, которая параллельна с интерфейсом отображения, а линия измерения является относительно статичной по отношению к интерфейсу отображения.
[0033] Горизонтальная линия начала отсчета является линией начала отсчета для определения горизонтального направления, и она всегда находится в горизонтальном положении. Линия измерения предназначена для измерения угла между объектом и горизонтальной плоскостью, и она является относительно статичной по отношению к интерфейсу отображения. Линия измерения может быть одна или может быть более линий измерения, но в этом примере осуществления, например, всего одна линия измерения.
[0034] Линия измерения может быть параллельна длинной стороне или короткой стороне терминала, опираясь на первую горизонтальную линию начала отсчета и первую линию измерения на схематическом виде на фиг. 1В, и на вторую горизонтальную линию начала отсчета и вторую линию измерения на схематическом виде на фиг. 1С. Или линия измерения также может и не быть параллельной длинной стороне или короткой стороне терминала, опираясь на третью горизонтальную линию начала отсчета и третью линию измерения на схематическом виде на фиг. 2В. Поскольку длинная сторона терминала располагается параллельно горизонтальной плоскости, а линия измерения не располагается параллельно длинной стороне терминала, линия измерения не располагается параллельно горизонтальной линии начала отсчета.
[0035] Когда камера включена, она делает фотографии объекта в режиме реального времени и отображает сфотографированный объект на интерфейсе отображения.
[0036] На этапе 203 во время поворота терминала таким образом, чтобы край объекта стал параллельным линии измерения, рассчитывается угол между линией измерения и горизонтальной линией начала отсчета.
[0037] Линия измерения является относительно статичной в интерфейсе отображения, а горизонтальная линия начала отсчета сохраняет горизонтальное положение, поэтому при повороте терминала между линией измерения и горизонтальной линией начала отсчета образуется прилежащий угол, который можно измерить уклонометром-приложением.
[0038] Расчет угла между линией измерения и горизонтальной линией начала отсчета во время поворота терминала так, чтобы край объекта стал параллельным линии измерения, включает в себя.
[0039] 1). Если линия измерения параллельна или совпадает с горизонтальной линией начала отсчета в начальный момент, измеряется угол поворота линии измерения по отношению к горизонтальной линии начала отсчета, а сам угол поворота определяется как угол между линией измерения и горизонтальной линией начала отсчета.
[0040] 2). Если в начальный момент между линией измерения и горизонтальной линией начала отсчета существует начальный угол, измеряется угол поворота линии измерения по отношению к горизонтальной линии начала отсчета, угловая разница вычисляется путем вычитания значения начального угла из угла поворота, а угловая разница определяется как угол между линией измерения и горизонтальной линией начала отсчета.
[0041] При расчете угла, если линия измерения параллельна или совпадает с горизонтальной линией начала отсчета в начальный момент, угол поворота линии измерения относительно горизонтальной линии начала отсчета является углом поворота терминала относительно горизонтальной плоскости. Уклономер-приложение может измерять угол поворота терминала относительно горизонтальной плоскости, и измеренный угол определяется как угол между линией измерения и горизонтальной линией начала отсчета. Если в начальный момент между линией измерения и горизонтальной линией начала отсчета существует начальный угол, уклономер-приложение получает значение начального угла между терминалом и горизонтальной плоскостью до того, как пользователь повернет терминал; пользователь поворачивает терминал и останавливает его поворот, когда край объекта, фотографируемого камерой, параллелен линии измерения в интерфейсе отображения; уклономер-приложение измеряет угол поворота между терминалом и горизонтальной плоскостью; а угол между линией измерения и горизонтальной линией начала отсчета вычисляется путем вычитания начального угла из угла поворота.
[0042] Если требуется, чтобы указать угол поворота пользователю, уклономер-приложение может измерять угол вышеуказанным способом с заданным интервалом, и отображать измеренный угол в интерфейсе отображения во время поворота терминала.
[0043] Во время определения, находится ли край объекта параллельно линии измерения, пользователь может удерживать терминал в положении в течение заданного периода, и когда терминал определит, что в течение заданного периода он находится в таком определенном положении, что край объекта параллелен линии измерения, запускается уклономер-приложение для расчета угла; или во время определения, находится ли край объекта параллельно линии измерения, пользователь может отправить на терминал сигнал запуска, и когда терминал получает сигнал запуска, край объекта определяется параллельным линии измерения, и запускается уклономер-приложение для расчета угла. Сигнал запуска можно отправить нажатием кнопки на дисплее или выполнением жестикуляционного действия в интерфейсе отображения, и подобными способами, которые не ограничены в вариантах осуществления.
[0044] На этапе 204 угол, полученный, когда край был параллелен линии измерения, определяется как угол между объектом и горизонтальной плоскостью.
[0045] Когда линия измерения находится параллельно краю объекта, угол между линией измерения и горизонтальной линией начала отсчета будет углом между объектом и горизонтальной плоскостью. Таким образом, терминал может определить угол, рассчитанный, когда край объекта находится параллельно линии измерения, как угол между объектом и горизонтальной плоскостью.
[0046] Для лучшего понимания в примере осуществления иллюстрируется пример на процессе измерения угла, в котором терминал расположен на боковой стороне. Фиг. 2С представляет схематический вид, показывающий применение измерения углов в соответствии с примером осуществления. На фиг. 2С линия измерения параллельна длинной стороне терминала, а заданный диапазон углов составляет (10°, 170°).
[0047]  До поворота терминала пользователем угол между терминалом и горизонтальной плоскостью составляет 0°, поэтому линия 211 измерения и горизонтальная линия 212 начала отсчета отображаются в интерфейсе отображения, линии 211 измерения параллельна горизонтальной линии 212 начала отсчета, если обратиться к первому измерению угла, показанному на схематическом виде на фиг. 2С (1).
До поворота терминала пользователем угол между терминалом и горизонтальной плоскостью составляет 0°, поэтому линия 211 измерения и горизонтальная линия 212 начала отсчета отображаются в интерфейсе отображения, линии 211 измерения параллельна горизонтальной линии 212 начала отсчета, если обратиться к первому измерению угла, показанному на схематическом виде на фиг. 2С (1).
[0048]  В процессе поворота терминала пользователем угол между терминалом и горизонтальной плоскостью измеряет уклономер-приложение. Когда угол между терминалом и горизонтальной плоскостью достигает 10°, то есть попадает в диапазон угла (10°, 170°), терминал включает камеру и отображает линию 211 измерения и горизонтальную линию 212 начала отсчета, а также объект, фотографируемый камерой в режиме реального времени. Предполагается, что камера фотографирует пластину 214, лежащую на столе 213, если обратиться ко второму измерению угла, показанному на схематическом виде на фиг. 2С (2).
В процессе поворота терминала пользователем угол между терминалом и горизонтальной плоскостью измеряет уклономер-приложение. Когда угол между терминалом и горизонтальной плоскостью достигает 10°, то есть попадает в диапазон угла (10°, 170°), терминал включает камеру и отображает линию 211 измерения и горизонтальную линию 212 начала отсчета, а также объект, фотографируемый камерой в режиме реального времени. Предполагается, что камера фотографирует пластину 214, лежащую на столе 213, если обратиться ко второму измерению угла, показанному на схематическом виде на фиг. 2С (2).
[0049]  Когда пользователь поворачивает терминал таким образом, чтобы край пластины 214 стал параллельным линии измерения 211, уклономер-приложение рассчитывает, что угол между измерительной линией 211 и горизонтальной линией начала отсчета 212 составляет 40°. Угол 40° определяется как угол между пластиной 214 и горизонтальной плоскостью, и отображается в интерфейсе отображения, опираясь на третий угол измерения, показанный на схеме Фиг. 2С (3).
Когда пользователь поворачивает терминал таким образом, чтобы край пластины 214 стал параллельным линии измерения 211, уклономер-приложение рассчитывает, что угол между измерительной линией 211 и горизонтальной линией начала отсчета 212 составляет 40°. Угол 40° определяется как угол между пластиной 214 и горизонтальной плоскостью, и отображается в интерфейсе отображения, опираясь на третий угол измерения, показанный на схеме Фиг. 2С (3).
[0050] Необходимо отметить, что терминал может измерять угол между двумя объектами, а способ измерения также включает в себя:
[0051] 1). Если камера фотографирует другой объект во время поворота терминала таким образом, чтобы край другого объекта стал параллельным линии измерения, рассчитывается угол между линией измерения и горизонтальной линией начала отсчета.
[0052] 2). Угол, полученный, когда край другого объекта был параллелен линии измерения, определяется как угол между другим объектом и горизонтальной плоскостью.
[0053] 3). Рассчитывается угловая разница путем вычитания угла между другим объектом и горизонтальной плоскостью из угла между объектом и горизонтальной плоскостью.
[0054] 4). Абсолютная величина значения разницы определяется как угол между объектом и другим объектом.
[0055] До или после того, как терминал выполнит этапы 201-204, чтобы получить угол между объектом и горизонтальной плоскостью, можно снова выполнить этапы 201-204, чтобы получить угол между другим объектом и горизонтальной плоскостью. Затем можно рассчитать значение угловой разницы вычитанием угла между другим объектом и горизонтальной плоскостью из угла между объектом и горизонтальной плоскостью, и абсолютная величина значения разницы определяется как угол между объектом и другим объектом.
[0056] Например, если измеренный угол между объектом и горизонтальной плоскостью составляет 49°, когда терминал выполняет этапы 201-204 впервые, а угол между другим объектом и измеренной горизонтальной плоскостью составляет 13°, когда терминал выполняет этапы 201-204 второй раз, то угол между объектом и другим объектом составляет 36°.
[0057] Соответственно, в способе измерения угла, представленного настоящим изобретением, горизонтальная линия начала отсчета и линия измерения, а также объект, фотографируемый в этот момент камерой, отображаются в интерфейсе терминала, плоскость определяется линией измерения и горизонтальной линией начала отсчета, параллельной интерфейсу отображения, а линия измерения является относительно статичной по отношению к интерфейсу отображения; во время процесса измерения терминал поворачивают таким образом, чтобы край объекта был параллельным линии измерения, и вычисляется угол между линией измерения и горизонтальной линией начала отсчета; и угол, полученный, когда край находится параллельно линии измерения определяется как угол между объектом и горизонтальной плоскостью. Поэтому, если линия измерения на самом деле находится параллельно краю объекта, то терминал может измерить угол между объектом и горизонтальной плоскостью, так что проблему однообразности функции терминала по измерению угла можно разрешить, и, таким образом, достигается эффект расширения функции измерения угла терминала.
[0058] Кроме того, запуская камеру после того, как оно было обнаружено, что терминал находится в наклонном положении, потерю ресурсов можно избежать при измерении угла между объектом в горизонтальной плоскости и горизонтальной плоскостью терминала. Таким образом, достигается эффект экономии ресурсов терминала.
[0059] Фиг. 3 представляет структурную блок-схему, показывающую аппарат для измерения угла в соответствии с примером осуществления. Как показано на фиг. 3, аппарат для измерения угла можно применять, но не ограничивается этим, к терминалу, включающему в себя камеру, и аппарат включает в себя: модуль 301 отображения, первый расчетный модуль 302 и первый модуль определения 303.
[0060] Модуль 301 отображения выполнен для отображения горизонтальной линии начала отсчета и линии измерения, а также объект, фотографируемый в этот момент камерой, в интерфейсе терминала, и плоскости определенной линией измерения и горизонтальной линией начала отсчета параллельно с интерфейсом отображения, а линия измерения является относительно статичной по отношению к интерфейсу отображения.
[0061] Первый расчетный модуль 302 используется для расчета угла между линией измерения и горизонтальной линией начала отсчета во время поворота терминала таким образом, чтобы край объекта стал параллельным линии измерения.
[0062] Первый модуль определения 303 используется для определения угла, полученного с помощью первого расчетного модуля 302, когда край был параллелен линии измерения, в качестве угла между объектом и горизонтальной плоскостью.
[0063] Соответственно, в аппарате измерения угла, представленного настоящим изобретением, горизонтальная линия начала отсчета и линия измерения, а также объект, фотографируемый в этот момент камерой, отображаются в интерфейсе терминала, плоскость определяется линией измерения и горизонтальной линией начала отсчета параллельной интерфейсу отображения, а линия измерения является относительно статичной по отношению к интерфейсу отображения; во время процесса измерения терминал поворачивают таким образом, чтобы край объекта был параллельным линии измерения, вычисляется угол между линией измерения и горизонтальной линией начала отсчета; и угол, полученный, когда край находится параллельно линии измерения определяется как угол между объектом и горизонтальной плоскостью. Поэтому, если линия измерения на самом деле находится параллельно краю объекта, то терминал может измерить угол между объектом и горизонтальной плоскостью, так что проблему однообразности функции терминала по измерению угла можно разрешить, и, таким образом, достигается эффект расширения функции измерения угла терминала.
[0064] Фиг. 4 представляет структурную блок-схему, показывающую аппарат для измерения угла в соответствии с примером варианта осуществления. Как показано на фиг. 4, аппарат измерения угла можно применять, но не ограничиваться этим, к терминалу, включающему в себя камеру. Аппарат включает в себя: модуль 301 отображения, первый расчетный модуль 302 и первый модуль 303 определения.
[0065] Модуль 301 отображения выполнен для отображения горизонтальной линии начала отсчета и линии измерения, а также объект, фотографируемый в этот момент камерой, в интерфейсе терминала, плоскости определяемой линией измерения и горизонтальной линией начала отсчета параллельно с интерфейсом отображения, а линия измерения является относительно статичной по отношению к интерфейсу отображения.
[0066] Первый расчетный модуль 302 используется для расчета угла между линией измерения и горизонтальной линией начала отсчета во время поворота терминала таким образом, чтобы край объекта стал параллельным линии измерения.
[0067] Первый модуль 303 определения используется для определения угла, полученного с помощью первого расчетного модуля 302, когда край был параллелен линии измерения, как угла между объектом и горизонтальной плоскостью.
[0068] Если требуется, модуль 301 отображения включает в себя: блок 3011 обнаружения и блок 3012 отображения.
[0069] Блок 3011 обнаружения используется, чтобы обнаруживать, находится ли терминал в наклонном положении.
[0070] Блок 3012 отображения выполнен для включения камеры и для отображения горизонтальной линии начала отсчета и линии измерения, а также объекта, фотографируемого в данный момент камерой, на терминале, если блок 3011 обнаружения определит, что терминал находится в наклонном положении.
[0071] Если требуется, блок 3011 обнаружения включает в себя: измерительный элемент 30111, элемент 30112 обнаружения и элемент 30113 определения.
[0072] Измерительный элемент 30111 выполнен для измерения угла наклона между терминалом и горизонтальной плоскостью.
[0073] Элемент 30112 детектирования выполнен для обнаружения, попадает ли угол наклона, обнаруженный измерительным элементом 30111, в заданный диапазон углов.
[0074] Элемент 30113 определения выполнен для определения, что терминал находится в наклонном положении, если обнаруживается, что угол наклона попадает в заданный диапазон углов.
[0075] Если требуется, первый расчетный модуль 302 включает в себя: первый расчетный блок 3021 и второй расчетный блок 3022.
[0076] Первый расчетный блок 3021 измеряет угол поворота линии измерения по отношению к горизонтальной линии начала отсчета и определяет угол поворота как угол между линией измерения и горизонтальной линией начала отсчета, если линия измерения параллельна или совпадает с горизонтальной линией начала отсчета в начальный момент.
[0077] Второй расчетный блок 3022 измеряет угол поворота линии измерения по отношению к горизонтальной линии начала отсчета, вычисляет угловую разницу путем вычитания значения начального угла из угла поворота, и определяет угловую разницу как угол между линией измерения и горизонтальной линией начала отсчета, если в начальный момент между линией измерения и горизонтальной линией начала отсчета существует начальный угол.
[0078] Если требуется, аппарат для измерения угла включает в себя: второй расчетный модуль 304, второй модуль 305 определения, третий расчетный модуль 306 и третий модуль 307 определения.
[0079] Второй расчетный модуль 304 выполнен для вычисления угла между линией измерения и горизонтальной линией начала отсчета в процессе поворота терминала таким образом, чтобы край другого объекта был параллелен линии измерения, если камера фотографирует другой объект.
[0080] Второй модуль определения 305 используется для определения угла, полученного с помощью второго расчетного модуля 304, когда край другого объекта был параллелен линии измерения, как угла между другим объектом и горизонтальной плоскостью.
[0081] Третий расчетный модуль 306 рассчитывает угловую разницу путем вычитания угла между другим объектом и горизонтальной плоскостью из угла между объектом и горизонтальной плоскостью.
[0082] Третий модуль 307 определения выполнен для определения абсолютной величины значения разницы как угла между объектом и другим объектом.
[0083] Соответственно, в аппарате измерения угла, представленного настоящим изобретением, горизонтальная линия начала отсчета и линия измерения, а также объект, фотографируемый в этот момент камерой, отображаются в интерфейсе терминала, плоскость определяется линией измерения и горизонтальной линией начала отсчета параллельной интерфейсу отображения, а линия измерения является относительно статичной по отношению к интерфейсу отображения; во время измерения терминал поворачивают терминал таким образом, чтобы край объекта был параллельным линии измерения, вычисляется угол между линией измерения и горизонтальной линией начала отсчета; и угол, полученный, когда край находится параллельно линии измерения определяется как угол между объектом и горизонтальной плоскостью. Поэтому, если линия измерения на самом деле находится параллельно краю объекта, то терминал может измерить угол между объектом и горизонтальной плоскостью, так что проблему однообразности функции терминала по измерению угла можно разрешить, и, таким образом, достигается эффект расширения функции измерения угла терминала.
[0084] Кроме того, включая камеру после того, как было обнаружено, что терминал находится в наклонном положении, потерю ресурсов можно избежать при измерении угла между объектом в горизонтальной плоскости и горизонтальной плоскостью терминала. Таким образом, достигается эффект экономии ресурсов терминала.
[0085] Что касается аппарата в описанных выше вариантах осуществления, подробно описаны конкретные действия, выполняемые каждым модулем в вариантах осуществления по способу, поэтому подробное описание в настоящем документе опускается.
[0086] Терминал также представлен примерами осуществления вариантов настоящего изобретения и включает в себя: процессор; и память для хранения инструкций, исполняемых процессором. Процессор выполнен для отображения горизонтальной линии начала отсчета и линии измерения, а также объекта, фотографируемого в данный момент камерой, при этом в интерфейсе терминала, плоскость, определяемая линией измерения и горизонтальной линией начала отсчета параллельно с интерфейсом отображения, и линия измерения является относительно статичной относительно интерфейса отображения; для расчета угла между линией измерения и горизонтальной линией начала отсчета во время поворота терминала таким образом, чтобы край объекта стал параллельным линии измерения; и определения угла, полученного, когда край был параллелен линии измерения в качестве угла между объектом и горизонтальной плоскостью.
[0087] Соответственно, в терминале, представленном настоящим изобретением, горизонтальная линия начала отсчета и линия измерения, а также объект, фотографируемый в тот момент камерой, отображаются в интерфейсе терминала, плоскость определяется линией измерения и горизонтальной линией начала отсчета параллельной интерфейсу отображения, и линия измерения является относительно статичной по отношению к интерфейсу отображения; во время измерения терминал поворачивают таким образом, чтобы край объекта был параллельным линии измерения, вычисляется угол между линией измерения и горизонтальной линией начала отсчета; и угол, полученный, когда край находится параллельно линии измерения, определяется как угол между объектом и горизонтальной плоскостью. Поэтому, если линия измерения на самом деле находится параллельно краю объекта, то терминал может измерить угол между объектом и горизонтальной плоскостью, так что проблему однообразности функции терминала по измерению угла можно разрешить, и, таким образом, достигается эффект расширения функции измерения угла терминала.
[0088] Что касается терминала в описанных выше вариантах осуществления соответствующего способа, были подробно описаны конкретные действия, выполняемые каждым модулем в вариантах осуществления способа, поэтому подробное описание в настоящем документе опускается.
[0089] Фиг. 5 структурная блок-схема, показывающая устройство 500 для измерения угла в соответствии с примером варианта осуществления. Например, устройством 500 может быть мобильный телефон, компьютер, цифровой широковещательный терминал, устройство обмена сообщениями, игровая приставка, планшет, медицинское устройство, тренажер, КПК, и тому подобные.
[0090] Как показано на фиг. 5, устройство 500 может включать в себя один или более следующих компонентов: блок 502 обработки, запоминающее устройство 504, блок 506 питания, мультимедийный блок 508, аудиоблок 510, интерфейс 512 ввода/вывода, сенсорный блок 514 и блок 516 связи.
[0091] Блок 502 обработки, как правило, управляет всеми операциями устройства 500, связанные с дисплеем, телефонными звонками, передачей данных, работой камеры, а также функциями записи. Блок 502 обработки может включать один или более процессоров 518 для выполнения инструкции по всем или отдельным этапам описанных выше способов. Кроме того, блок 502 обработки может включать в себя один или более модулей, которые организуют взаимодействие между блоком 502 обработки и другими блоками. Например, блок 502 обработки может включать в себя мультимедийный модуль, который организуют взаимодействие между мультимедийным блоком 508 и блоком 502 обработки.
[0092] В запоминающем устройстве 504 хранятся различные типы данных, чтобы поддерживать работу устройства 500. Примеры таких данных включают в себя инструкции для любых приложений или способов, которые применяются на устройстве 500: контактные данные, данные телефонной книги, сообщения, фотографии, видео и т.д. Память 504 можно задействовать с использованием любого типа энергозависимых и энергонезависимых запоминающих устройств, или их комбинации, таких как статическое запоминающее устройство с произвольной выборкой (SRAM электрически стираемое программируемое постоянное запоминающее устройство (EEPROM), стираемое программируемое постоянное запоминающее устройство (EPROM), программируемое постоянное запоминающее устройство (PROM), постоянное запоминающее устройство (ROM), магнитное запоминающее устройство, флэш-память, магнитный или оптический диск.
[0093] Блок 506 питания может включать систему управления питанием, один или более источников питания, а также любые другие блоки, связанные с генерированием, управлением и распределением питания в устройстве 500.
[0094] Мультимедийный блок 508 включает в себя экран, обеспечивающий выходной интерфейс между устройством 500 и пользователем. В некоторых вариантах осуществления экран может включать жидкокристаллический дисплей (ЖКД) и сенсорную панель (СП). Если экран включает в себя сенсорную панель, экран может быть выполнен в виде сенсорного экрана для получения входных сигналов от пользователя. Сенсорная панель включает один или несколько датчиков касания, чтобы распознавать прикосновения, скольжения и жесты на сенсорной панели. Датчики касания могут не только воспринимать прикосновение или скольжение, но и воспринимать определенный период времени и давления, связанное с прикосновением или скольжением. В некоторых вариантах осуществления мультимедийный блок 508 включает фронтальную камеру и/или заднюю камеру. Фронтальная камера и задняя камера может получать внешние мультимедийные данные во время работы устройства 500, как, например, в режиме фотографирования или в режиме видео. И фронтальная и тыловая камеры могут представлять собой фиксированную систему оптических линз или иметь фокус и возможность оптического масштабирования.
[0095] Аудиоблок 510 выводит и/или получает аудиосигналы. Например, аудиоблок 510 включает в себя микрофон ("MIC") с возможностью приема внешнего аудиосигнала во время работы устройства 500, как, например, в режиме вызова, в режиме записи и в режиме распознавания голоса. Далее полученный звуковой сигнал можно сохранить в запоминающем устройстве 504 или передать с помощью блока 516 связи. В некоторых примерах осуществления аудиоблок 510 дополнительно включает в себя динамик для вывода аудиосигналов.
[0096] Интерфейс 512 ввода/вывода обеспечивает интерфейс между блоком 502 обработки и модулями периферийных интерфейсов, таких как клавиатура, колесо мышки, кнопки, и тому подобное. Кнопки могут включать в себя, но не ограничиваются этим, кнопку возврата в начало, кнопку громкости, кнопку пуска и кнопку блокировки.
[0097] Сенсорный блок 514 включает в себя один или более датчиков для обеспечения оценки состояния различных состояний устройства 500. Например, сенсорный блок датчик может определять открытое/закрытое состояние устройства 500, относительное расположение блоков, например, дисплей и клавиатура устройства 500, изменение положения устройства 500 или блоков устройства 500, наличие или отсутствие контакта пользователя с устройством 500, ориентации или ускорение/замедление устройства 500, изменение температуры устройства 500. Сенсорный блок 514 может включать в себя датчик приближения с возможностью обнаружения присутствия близлежащих объектов без какого-либо физического контакта. Сенсорный блок 514 может также включать в себя фоточувствительный элемент, например, КМОП или датчик изображения CCD для использования в приложениях обработки изображений. В некоторых примерах осуществления сенсорный блок 514 может также включать в себя датчик акселерометра, гироскопический датчик, магнитный датчик, датчик давления или датчик температуры.
[0098] Блок 516 связи выполнен для обеспечения связи, проводной или беспроводной, между устройством 500 и другими устройствами. Устройство 500 может иметь доступ к беспроводной сети на основе стандарта связи, как, например, Wi-Fi, 2G или 3G, или их комбинации. В одном примере осуществления блок 516 связи принимает широковещательный сигнал или широковещательную соответствующую информацию от системы управления внешнего широкого вещания через широковещательный канал. В одном примере осуществления блок 516 связи дополнительно включает в себя модуль беспроводной радиосвязи на коротком расстоянии (NFC). Например, модуль NFC можно задействовать на основе технологии радиочастотной идентификации (RFID), ассоциации ИК техники передачи данных (IrDA), сверхширокополосной технологии (UWB), технологии Bluetooth (ВТ) и других технологий.
[0099] В примерах вариантов осуществления устройство 500 может быть выполнено на основе одной или более специализированных интегральных схемах (ASIC), цифровых сигнальных процессоров (DSP), устройствах цифровой обработки сигналов (DSPD), программируемых логических устройствах (PLD), программируемых вентильных матрицах (FPGA), контроллерах, микроконтроллерах, микропроцессорах, или других электронных компонентах для выполнения описанных выше способов.
[0100] В примерах вариантов осуществления также предусмотрен долговременный машиночитаемый носитель данных, в том числе инструкций, которые включены в запоминающее устройство 504, выполняются процессором 518 в устройстве 500 для выполнения описанных выше способов. Например, долговременным машиночитаемым носителем информации может быть ROM, RAM, CD-ROM, магнитная лента, гибкий диск, оптическое устройство хранения данных и тому подобное.
[0101] Другие примеры вариантов осуществления изобретения будут очевидны для специалистов в данной области из рассмотрения описания и практического использования изобретения, раскрытого в настоящем документе. Настоящая заявка предназначена охватить любые изменения, способы использования или адаптации изобретения, следующие за общими принципами, и в том числе такие отклонения от настоящего изобретения, которые относятся к известной или обычной практике в данной области техники. Предполагается, что описание и примеры следует рассматривать только как иллюстративные материалы, а истинный объем и сущность настоящего изобретения должны быть указаны в последующей формуле изобретения.
[0102] Необходимо иметь в виду, что настоящее изобретение не ограничивается точной конструкцией, которая была описана выше и показана на сопроводительных чертежах, и что могут проводиться различные модификации и изменения без отступления от объема изобретения. Предполагается, что объем изобретения ограничивается только прилагаемой формулой изобретения.

Заявленная группа изобретений относится к способу и устройству для измерения уровня. В заявленном способе производят отображение горизонтальной линии начала отсчета и линии измерения, а также объекта, фотографируемого в этот момент камерой в интерфейсе терминала, плоскости определяемой линией измерения и горизонтальной линией начала отсчета параллельной интерфейсу отображения, и линии измерения, которая является относительно статичной по отношению к интерфейсу отображения. Далее производят расчет угла между линией измерения и горизонтальной линией начала отсчета во время поворота терминала таким образом, чтобы край объекта был параллельным линии измерения, определение угла, полученного, когда край расположен параллельно линии измерения, в качестве угла между объектом и горизонтальной плоскостью. Аппарат включает в себя: модуль отображения, первый расчетный модуль и первый модуль определения. Технический результат - расширение функции измерения угла терминала. 2 н. и 6 з.п. ф-лы, 5 ил.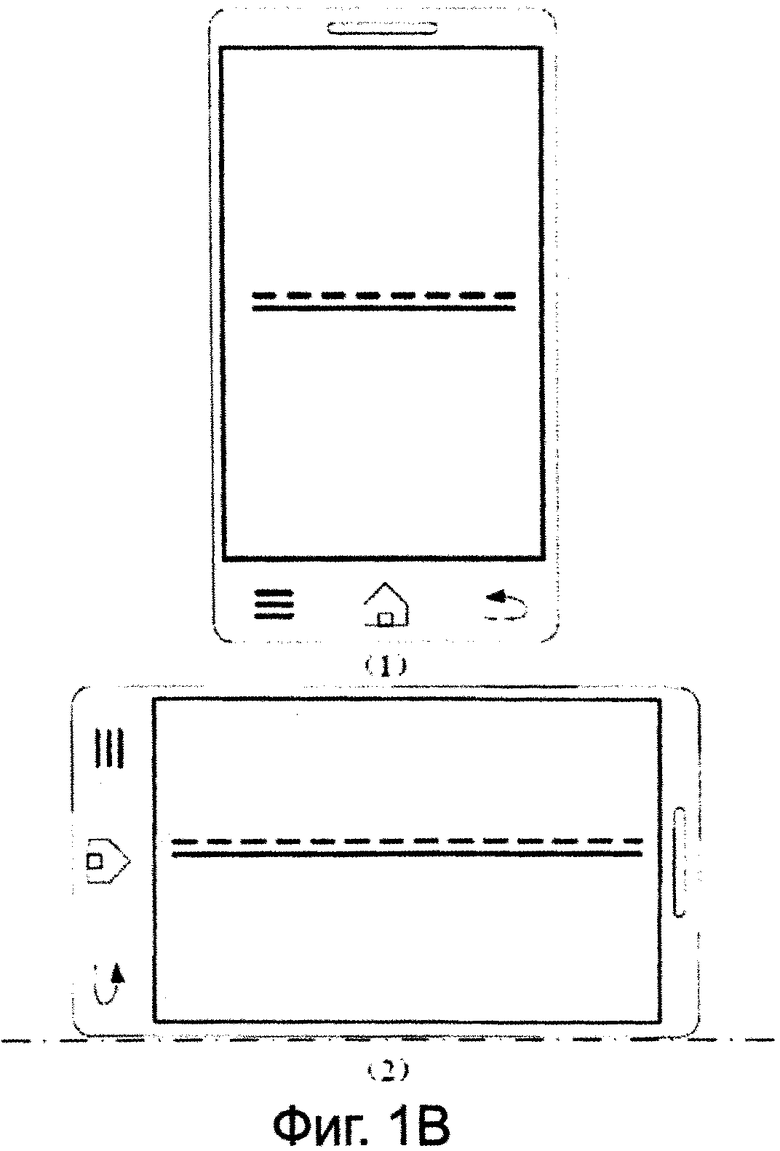
1. Способ измерения угла, включающий в себя:
отображение двух объектов, фотографируемых в этот момент камерой, а также горизонтальной линии начала отсчета и линии измерения в интерфейсе терминала, плоскости, определяемой линией измерения и горизонтальной линией начала отсчета, параллельной интерфейсу отображения, и линии измерения, относительно статичной по отношению к интерфейсу отображения,
во время процесса измерения
поворот терминал так, чтобы край объекта был параллелен линии измерения, с выполнением расчета угла между линией измерения и горизонтальной линией начала отсчета, и
определение угла, полученного, когда край объекта параллелен линии измерения, в качестве угла между объектом и горизонтальной плоскостью,
поворот терминала таким образом, чтобы край другого объекта был параллельным линии измерения, с выполнением расчета угла между линией измерения и горизонтальной линией начала отсчета, и
определение угла, полученного, когда край другого объекта параллелен линии измерения, в качестве угла между другим объектом и горизонтальной плоскостью,
расчет угловой разницы путем вычитания угла между другим объектом и горизонтальной плоскостью из угла между объектом и горизонтальной плоскостью, и
определение абсолютной величины значения разницы как угла между объектом и другим объектом.
2. Способ по п. 1, отличающийся тем, что отображение горизонтальной линии начала отсчета и линии измерения, а также объекта, фотографируемого в этот момент камерой, в интерфейсе терминала, включает в себя
обнаружение того, находится ли терминал в наклонном положении, и
если обнаружено, что терминал находится в наклонном положении, включение камеры и отображение на терминале горизонтальной линии начала отсчета и линии измерения, а также объекта, фотографируемого в этот момент камерой.
3. Способ по п. 2, отличающийся тем, что обнаружение того, находится ли терминал в наклонном положении, включает в себя
измерение угла наклона между терминалом и горизонтальной плоскостью,
определение того, попадает ли угол наклона в заданный диапазон углов, и
если определено, что угол наклона попадает в заданный диапазон углов, определение того, что терминал находится в наклонном положении.
4. Способ по любому из пп. 1-3, отличающийся тем, что во время процесса измерения поворот терминала осуществляют таким образом, чтобы край объекта стал параллельным линии измерения, выполнение расчета угла между линией измерения и горизонтальной линией начала отсчета включает в себя:
если линия измерения параллельна или совпадает с горизонтальной линией начала отсчета в начальный момент, измерение угла поворота линии измерения по отношению к горизонтальной линии начала отсчета и определение угла поворота как угла между линией измерения и горизонтальной линией начала отсчета, и
если существует начальный угол между линией измерения и горизонтальной линией начала отсчета в начальный момент, измерение угла поворота линии измерения по отношению к горизонтальной линии начала отсчета,
расчет угловой разницы путем вычитания значения начального угла из угла поворота, и определение угловой разницы как угла между линией измерения и горизонтальной линией начала отсчета.
5. Аппарат для измерения угла, включающий в себя
модуль отображения, выполненный для отображения в интерфейсе терминала горизонтальной линии начала отсчета и линии измерения, а также двух объектов, фотографируемых в этот момент камерой, плоскости, определяемой линией измерения и горизонтальной линией начала отсчета, параллельной интерфейсу отображения, и линией измерения, относительно статичной по отношению к интерфейсу отображения,
первый расчетный модуль, выполненный для расчета угла между линией измерения и горизонтальной линией начала отсчета во время процесса измерения, в котором терминал поворачивается так, чтобы край объекта был параллелен линии измерения, и
первый модуль определения, выполненный для определения угла, полученного первым расчетным модулем, когда край объекта параллелен линии измерения, как угла между объектом и горизонтальной плоскостью,
второй расчетный модуль, выполненный для расчета угла между линией измерения и горизонтальной линией начала отсчета, во время процесса измерения, в котором терминал поворачивается так, чтобы край другого объекта был параллелен линии измерения,
второй модуль определения, выполненный для определения угла, полученного вторым расчетным модулем, когда край другого объекта параллелен линии измерения, как угла между другим объектом и горизонтальной плоскостью,
третий расчетный модуль, выполненный для расчета значения угловой разницы путем вычитания угла между другим объектом и горизонтальной плоскостью из угла между объектом и горизонтальной плоскостью, и
третий модуль определения, выполненный для определения абсолютной величины значения разницы в качестве угла между объектом и другим объектом.
6. Аппарат по п. 5, отличающийся тем, что модуль отображения включает в себя
блок обнаружения, выполненный для определения того, находится ли терминал в наклонном положении, и
блок отображения, выполненный для включения камеры и отображения горизонтальной линии начала отсчета и линии измерения, а также двух объектов, фотографируемых в этот момент камерой, на терминале, если блок обнаружения обнаружил, что терминал находится в наклонном положении.
7. Аппарат по п. 6, отличающийся тем, что блок обнаружения включает в себя
измерительный подблок, выполненный для измерения угла наклона между терминалом и горизонтальной плоскостью,
подблок обнаружения, выполненный для определения того, попадает ли угол наклона, обнаруженный измерительным элементом, в заданный диапазон углов, и
подблок определения, выполненный для определения того, что терминал находится в наклонном положении, если определяется, что угол наклона попадает в заданный диапазон углов.
8. Аппарат по любому из пп. 5-7, отличающийся тем, что расчетный модуль включает в себя
первый расчетный блок, выполненный для измерения угла поворота линии измерения по отношению к горизонтальной линии начала отсчета и определения угла поворота в качестве угла между линией измерения и горизонтальной линией начала отсчета, если линия измерения параллельна или совпадает с горизонтальной линией начала отсчета в начальный момент, и
второй расчетный блок, выполненный для измерения угла поворота линии измерения по отношению к горизонтальной линии начала отсчета, расчета угловой разницы путем вычитания значения начального угла из угла поворота, и определения угловой разницы как угла между линией измерения и горизонтальной линией начала отсчета, если существует начальный угол между линией измерения и горизонтальной линией начала отсчета в начальный момент.
| US 7593627 B2, 22.09.2009 | |||
| Устройство для автоматизированной оценки состояния оперативной памяти | 1985 |
|
SU1377038A1 |
| JP 2002271654 A, 20.09.2002 | |||
| US 20050117024 A1, 02.06.2005. | |||

