Область техники
Настоящее изобретение относится к области мониторинга режима вращения газотурбинного двигателя, в частности авиационного турбореактивного двигателя.
Предшествующий уровень техники
Для двухконтурного турбореактивного двигателя, содержащего ротор низкого давления и ротор высокого давления, как известно, отслеживают режим вращения ротора низкого давления, который известен специалисту под обозначением режима N1. Мониторинг режима N1 обеспечивает срабатывание нескольких функций защиты турбореактивного двигателя в случае обнаружения аномалии.
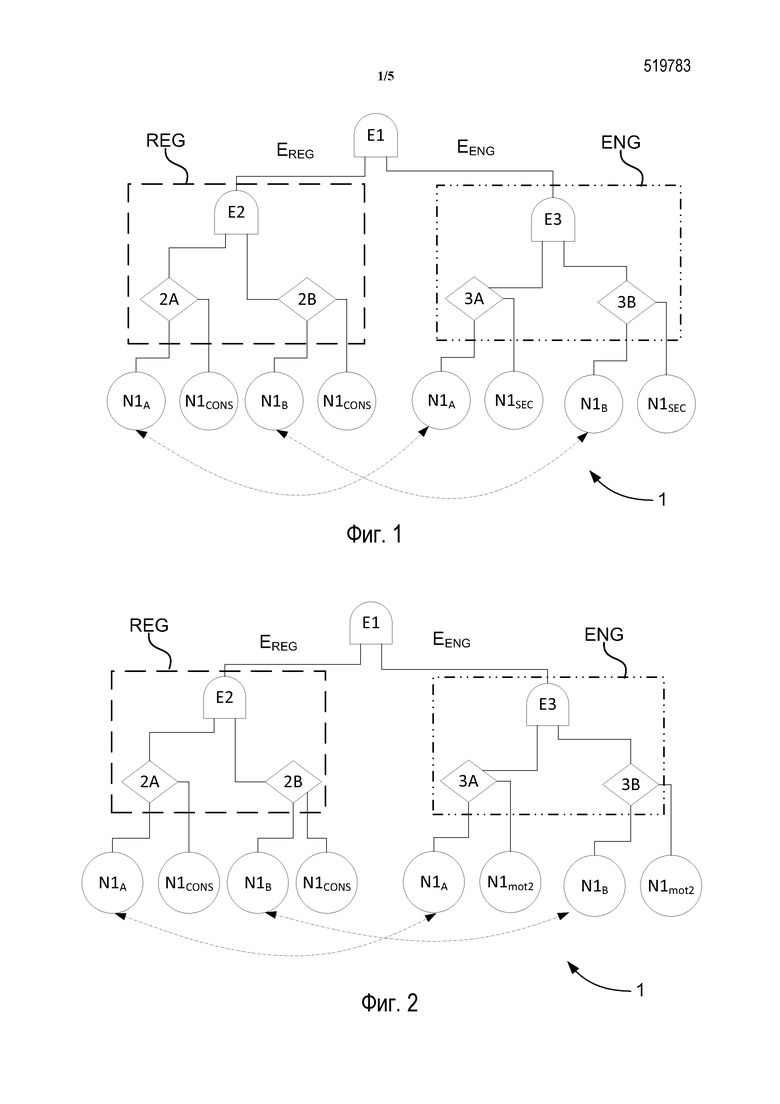
Как известно и как показано на фиг. 1, турбореактивный двигатель содержит систему 1 мониторинга, которая включает в себя модуль регулирования REG режима N1, предназначенный для регулирования режима турбореактивного двигателя в зависимости от значения, задаваемого пилотом летательного аппарата, и модуль включения ENG функции защиты, чтобы исправлять нарушение в работе турбореактивного двигателя, возникающее в режиме N1 турбореактивного двигателя.
Функция защиты UHT
Обычная функция защиты является функцией защиты от неконтролируемого превышения тяги, известного специалисту в данной области под английской аббревиатурой UHT от «Uncontrolled High Thrust». Функция UHT состоит в прекращении подачи топлива в турбореактивный двигатель в случае обнаружения превышения тяги упомянутого турбореактивного двигателя. Эта функция позволяет избегать асимметрии тяги летательного аппарата между двумя двигателями летательного аппарата. Функция защиты UHT является активной, только когда летательный аппарат летит на низкой высоте/на низкой скорости, и является неактивной вне этой области.
Как показано на фиг. 1, система 1 мониторинга классически содержит модуль регулирования REG режима N1, предназначенный для регулирования режима N1 турбореактивного двигателя в зависимости от значения N1cons, заданного пилотом летательного аппарата. Как показано на этой фиг. 1, модуль регулирования REG системы 1 мониторинга турбореактивного двигателя содержит первый канал А измерения регулирования, выполненный с возможностью получения измерения N1А режима N1, и второй канал В измерения регулирования, выполненный с возможностью получения измерения N1В режима N1. Модуль регулирования REG дополнительно содержит средства сравнения 2А, 2В измерений N1А, N1В, полученных на каждом канале, с заданным значением тяги N1cons, определяемым пилотом летательного аппарата. Показанный на фиг. 1 логический порт И (обозначен Е2) позволяет объединить данные, определенные средствами сравнения 2А, 2В, чтобы модуль регулирования REG мог выдать на выходе консолидированное состояние тяги EREG, как показано на фиг. 1.
Например, если измерение N1А равно 4000 об/мин и измерение N1В равно 5000 об/мин при заданном значении тяги N1cons, равном 2000 об/мин, средства сравнения 2А, 2В модуля регулирования REG определяют, что турбореактивный двигатель находится в состоянии «превышения тяги», на каждом из каналов регулирования A, B. Логический порт И (обозначение Е2) определяет в этом случае, что состояние тяги EREG равно значению «ПРЕВЫШЕНИЕ ТЯГИ».
Как показано на фиг. 1, система 1 мониторинга содержит также модуль включения ENG функции защиты для исправления аномалии в работе турбореактивного двигателя, возникающей в режиме N1 турбореактивного двигателя.
Модуль включения ENG функции UHT содержит средства сравнения 3А, 3В, выполненные с возможностью сравнения измерений режима N1А, N1В, полученных через каналы измерения регулирования А, В модуля регулирования REG, с заданным предельным значением N1sec, чтобы включить функцию защиты UHT. На фиг. 1 логический порт И (обозначение Е3) позволяет объединить данные, определенные средствами сравнения 3А, 3В, чтобы модуль включения ENG выдал на выходе консолидированное состояние активности EENG, как показано на фиг. 1. Иначе говоря, модуль включения ENG функции UHT опирается на те же измерения режима N1А, N1В, полученные через каналы измерения регулирования A, B модуля регулирования REG, чтобы выдать консолидированное состояние активности EENG функции защиты UHT.
Таким образом, если измерение N1А равно 4000 об/мин и измерение N1В равно 5000 об/мин при заданном предельном значении тяги N1sec, равном 3000 об/мин, модуль включения ENG функции UHT выдает на выходе состояние активности EENG, равное «UHT АКТИВНАЯ», и должна быть включена функция UHT.
Функция защиты ATTCS
Другой известной функцией защиты является функция защиты от падения тяги, известная специалисту в данной области под английской аббревиатурой ATTCS от «Automatic Take-off Thrust Control System». Функция ATTCS состоит в автоматическом увеличении тяги первого двигателя летательного аппарата, когда на втором двигателе летательного аппарата во время критических фаз полета, например, на взлете, обнаруживают падение тяги или недостаточное ускорение, приводящее к падению тяги. Для применения функции ATTCS на летательном аппарате, содержащем два турбореактивных двигателя, между первым двигателем и вторым двигателем предусмотрена линия связи типа ARINC с целью обеспечения встречного диалога. Во время этого диалога между двигателями режим N1 первого двигателя сравнивают с режимом N1 второго двигателя (обозначенным N1mot2).
Для большей ясности обозначения на фиг. 1, используемые для описания функции UHT, при отсутствии несовместимости повторяются на фиг. 2 для описания функции ATTCS. Как показано на фиг. 2, модуль включения ENG функции ATTCS системы мониторинга турбореактивного двигателя содержит средства сравнения 3А, 3В, которые сравнивают измерения режимов N1А, N1В, полученные через каналы измерения регулирования А, В модуля регулирования REG, с режимом N1mot2 второго двигателя для включения функции защиты ATTCS. Логический порт И (обозначение Е3) позволяет объединить данные, определенные средствами сравнения 3А, 3В, чтобы модуль включения ENG выдал на выходе консолидированное состояние активности EENG, как показано на фиг. 2.
Надежность системы мониторинга
Чтобы проверить надежность системы 1 мониторинга, необходимо убедиться, что функции защиты типа UHT или ATTCS включены правильно, причем даже в случае нарушения в работе некоторых компонентов системы 1 мониторинга. Как известно, регистрируют опасные события, которые приводят к нарушению в работе упомянутых функций UHT и ATTCS. Опасные события определены в норме, известной специалисту под названием CS-25.
Среди наиболее опасных событий в норме CS-25 указаны события, соответствующие:
- падению тяги на первом двигателе (EREG=НЕДОБОР ТЯГИ) и не включению функции ATTCS на втором двигателе (EENG=ATTCS НЕ АКТИВНАЯ); и
- превышению тяги (EREG=ПРЕВЫШЕНИЕ ТЯГИ) и не включению функции UHT (EENG=UHT НЕ АКТИВНАЯ).
В качестве примера на фиг. 2 показаны событие «падение тяги» на первом двигателе и невключение функции ATTCS на втором двигателе. Опасное событие, обозначенное Е1, наступает, только если одновременно на первом двигателе обнаруживают падение тяги (EREG=НЕДОБОР ТЯГИ) и на втором двигателе не включается функция (EENG=ATTCS НЕ АКТИВНАЯ).
В качестве примера опасного события можно указать, что, если реальное значение режима N1 равно 1000 об/мин, если измерение N1А равно 4000 об/мин и измерение N1В отсутствует при заданном значении тяги N1cons, равном 2000 об/мин, средства сравнения 2А, 2В модуля регулирования REG определяют, что турбореактивный двигатель находится в состоянии «превышения тяги». По причине ошибочного высокого значения измерения N1А канала регулирования A состояние тяги EREG является ошибочным. Что касается модуля включения ENG, то при заданном значении режима N1mot2, равном 2000 об/мин, поскольку измерение N1А канала регулирования A является ошибочно высоким, модуль включения ENG функции ATTCS выдает на выходе состояние активности EENG, равное «ATTCS НЕ АКТИВНАЯ», тогда как двигатель находится в состоянии недобора тяги.
Иначе говоря, падение тяги (EREG=НЕДОБОР ТЯГИ) наступает, только если одновременно первый канал A измерения регулирования первого двигателя выдает ошибочную информацию о режиме N1, - N1А ошибочное, - и второй измерительный канал В первого двигателя не выдает информации или выдает ошибочную информацию о режиме N1, - N1В отсутствует или ошибочно. Таким образом, неправильное состояние тяги EREG возникает только в случае одновременного сбоя в работе на каждом из каналов измерения регулирования А, В. Точно так же, функция ATTCS не включается на втором двигателе (EENG= ATTCS НЕ АКТИВНАЯ), если одновременно оба канала измерения регулирования А, В второго двигателя получают от первого двигателя ошибочные данные N1А и N1В о режиме. Таким образом, если каналы измерения регулирования А, В одновременно выдают ошибочные данные, состояние тяги EREG и состояние активности функции EENG являются неправильными, поскольку каналы измерения регулирования А, В выдают значения режима в оба модуля REG, ENG системы 1 мониторинга.
На практике, появление наиболее опасных событий является чрезвычайно редким, поскольку оно соответствует одновременному появлению нарушения в работе модуля регулирования REG и нарушения в работе модуля включения ENG. Кроме того, как было указано выше, система 1 мониторинга содержит два канала измерения регулирования A, B, что позволяет существенно повысить надежность системы мониторинга. Таким образом, простое отдельное нарушение в работе одного компонента не влияет на систему 1 мониторинга турбореактивного двигателя как для включения функции UHT (фиг. 1), так и для включения функции ATTCS (фиг. 2).
Надежность системы мониторинга в «аварийном» режиме
Для летательных аппаратов новых поколений было предложено разрешать полет летательного аппарата, даже если в его вычислительном устройстве один канал измерения регулирования вышел из строя. Этот режим работы известен специалисту под названием «аварийная конфигурация» или «аварийный режим». Раньше «аварийный» режим работы не был разрешен, что создавало неудобства для пассажиров летательного аппарата, которые оставались на земле в ожидании ремонта, тогда как ни один жизненный компонент двигателя не вышел из строя, а нарушение произошло только на измерительном канале.
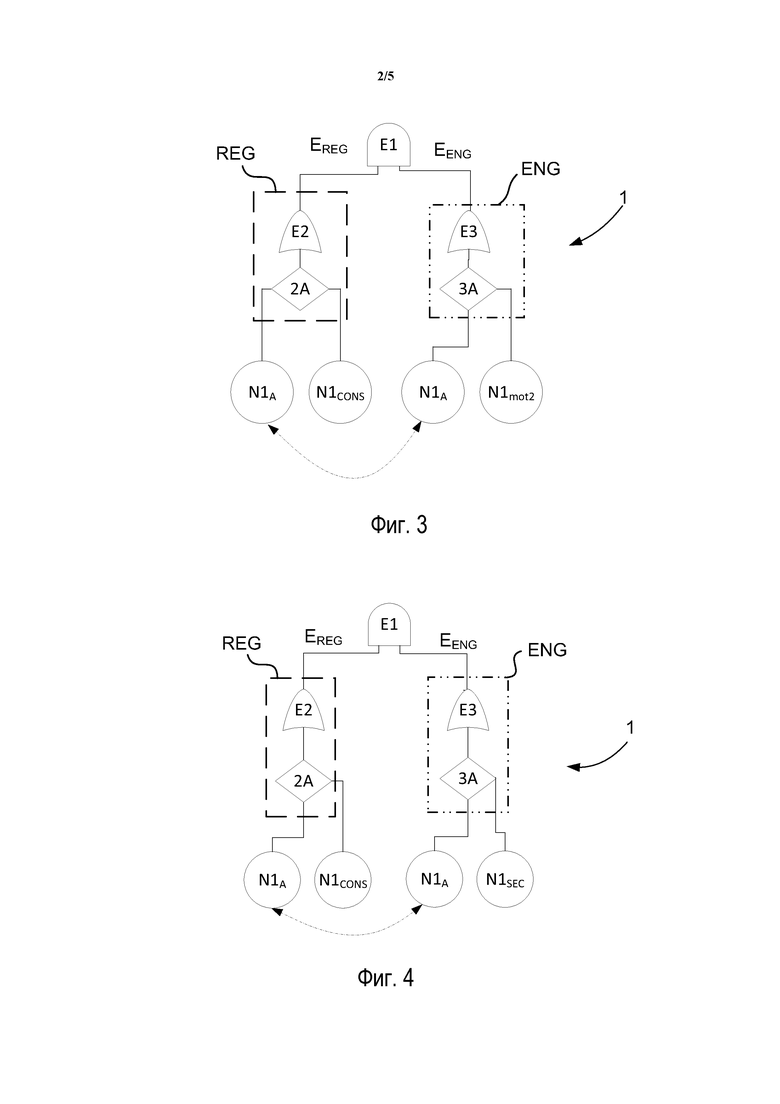
В «аварийном» режиме надежность системы 1 мониторинга снижается. Например, на фиг. 3 показана древовидная схема надежности при включении функции ATTCS, когда канал B измерения регулирования не исправен и не выдает данных. Аналогично фиг. 2, опасное событие Е1 наступает, только если одновременно на первом двигателе обнаруживают падение тяги (EREG=НЕДОБОР ТЯГИ), а на втором двигателем не включается функция ATTCS (EENG= ATTCS НЕ АКТИВНАЯ). Как показано на фиг. 3, поскольку канал B измерения регулирования вышел из строя, мониторинг основан только на канале А измерения регулирования первого двигателя.
Например, падение тяги (EREG=НЕДОБОР ТЯГИ) может наступить, если первый канал А измерения регулирования первого двигателя выдает ошибочное значение режима N1А, например, N1А представляет собой переоценку реального режима N1 турбореактивного двигателя, как было указано выше. В этом случае состояние тяги EREG, полученное модулем регулирования REG, зависит только от отдельного нарушения в работе. Как показано на фиг. 3, поскольку значение N1А, поступающее от первого двигателя, является ошибочным, функция ATTCS не включается. Таким образом, надежность в «аварийном» режиме значительно снижается, так как одно простое ошибочное значение может привести к наступлению опасного события для защитной функции ATTCS. Это же касается и функции UHT (фиг. 4).
Решением для устранения этого недостатка могло бы стать разрешение ручного включения защитных функций пилотом летательного аппарата. Однако конструкторы не предусматривают такого решения, поскольку настаивают на автоматическом включении защитных функций. Другим решением могло бы стать добавление каналов измерения регулирования, но это решение приводит к нежелательному увеличению расходов на изготовление и обслуживание системы мониторинга.
Краткое изложение сущности изобретения
Для устранения, по меньшей мере, некоторых из этих недостатков изобретением предлагается газотурбинный двигатель летательного аппарата, содержащий, по меньшей мере, один ротор, вращающийся в режиме N1, и систему мониторинга, содержащую:
- модуль регулирования, содержащий, по меньшей мере, первый канал измерения регулирования, выполненный с возможностью получения измерения режима N1, и второй канал измерения регулирования, независимый от первого канала измерения, выполненный с возможностью получения измерения режима N1, и средства сравнения полученного измерения режима с заданным значением тяги для получения состояния тяги; и
- модуль включения функции защиты типа UHT или ATTCS газотурбинного двигателя,
при этом газотурбинный двигатель дополнительно содержит систему защиты от превышения скорости, чтобы препятствовать вылету остатков с высокой энергией за пределы упомянутого газотурбинного двигателя, при этом система защиты содержит, по меньшей мере, один канал измерения превышения скорости, выполненный с возможностью получения значения превышения скорости вращающегося ротора газотурбинного двигателя, при этом газотурбинный двигатель содержит средства, выполненные с возможностью выдачи, по меньшей мере, одного измерения превышения скорости на основании полученного значения превышения скорости, когда один из каналов измерения регулирования вышел из строя, и в котором модуль включения содержит, по меньшей мере, одно средство сравнения упомянутого измерения превышения скорости, по меньшей мере, с одним контрольным режимом, определенным в зависимости от включаемой функции защиты, при этом упомянутый модуль включения конфигурирован с возможностью включения упомянутой функции защиты в зависимости от результатов сравнения.
Таким образом, согласно изобретению, модуль включения защитной функции типа UHT или ATTCS принимает решение о включении функции защиты не на основании измерения режима, полученного на канале регулирования, как в известных решениях, а на основании измерения превышения скорости, полученного на канале измерения превышения скорости системы защиты от превышения скорости, чтобы препятствовать выбросу остатков с высокой энергией за пределы упомянутого газотурбинного двигателя. Поскольку измерение превышения скорости, используемое системой защиты, не зависит от измерения, используемого системой мониторинга, нарушение измерения на одном канале регулирования не влияет на модуль включения защитной функции. Иначе говоря, регулирование тяги и включение защитной функции являются независимыми, что позволяет повысить надежность системы мониторинга. Кроме того, модуль включения работает независимо от модуля регулирования. Следовательно, он может включать свою функцию защиты на основании измерений превышения скорости независимо от модуля регулирования.
Кроме того, модуль регулирования содержит два независимых избыточных канала измерения для повышения надежности регулирования тяги, что позволяет предусматривать работу газотурбинного двигателя в «аварийном» режиме, когда один из двух каналов измерения не работает. В соответствии с характеристиками измерений превышения скорости и модуля включения сбой на одном канале измерения регулирования не может повлечь за собой нарушение для включения функции защиты. В «аварийном» режиме вероятность опасного события является исключительно низкой.
В первом варианте выполнения, система защиты от превышения скорости содержит первый канал обнаружения превышения скорости, выполненный с возможностью получения превышения скорости ротора газотурбинного двигателя, и второй канал обнаружения превышения скорости, независимый от первого канала обнаружения превышения скорости, выполненный с возможностью получения превышения скорости ротора газотурбинного двигателя, при этом модуль включения содержит средства сравнения двух полученных значений превышения скорости с контрольным режимом, определенным в зависимости от включаемой функции защиты. Таким образом, при любых связях каналов измерения превышения скорости с каналами измерения регулирования, в аварийном режиме всегда будет в наличии, по меньшей мере, одно измерение превышения скорости для работы модуля включения в аварийном режиме.
Во втором варианте выполнения система защиты от превышения скорости содержит первый канал обнаружения превышения скорости, выполненный с возможностью получения превышения скорости ротора газотурбинного двигателя, и второй канал обнаружения превышения скорости, независимый от первого канала обнаружения превышения скорости, выполненный с возможностью получения превышения скорости ротора газотурбинного двигателя, и она конфигурирована с возможностью выдачи консолидированного значения превышения скорости в модуль включения системы мониторинга в зависимости от значений превышения скорости, полученных на каналах измерения превышения скорости. Что касается модуля включения, то он содержит средства сравнения консолидированного превышения скорости с контрольным режимом, определенным в зависимости от включаемой функции защиты. Этот вариант работает так же, как и первый, относительно «аварийного» режима. Кроме того, консолидирование значения превышения скорости, передаваемого в модуль включения, предпочтительно позволяет избегать ошибочного значения превышения скорости, считываемого только на одном канале измерения. Во время консолидирования оба независимо полученных значения превышения скорости сравнивают, чтобы проверить их достоверность.
В третьем варианте выполнения канал измерения превышения скорости не зависит от канала измерения режима. Этот вариант может работать при «аварийном» режиме только с одним каналом измерения превышения скорости, поскольку в этом случае неисправность канала измерения регулирования не влияет на канал измерения превышения скорости. Его можно также комбинировать с двумя другими вариантами, поскольку он обеспечивает дополнительную избыточность.
Согласно отличительному признаку изобретения, для включения функции UHT газотурбинного двигателя средства сравнения модуля включения конфигурированы с возможностью сравнения, по меньшей мере, одного полученного значения превышения скорости с предельным режимом, соответствующим превышению тяги, максимально допустимому для газотурбинного двигателя. Решение о включении функции UHT не зависит от модуля регулирования тяги. Если превышение скорости превышает предельный режим, включается функция UHT, и подача топлива в газотурбинный двигатель прекращается.
Согласно другому отличительному признаку изобретения, газотурбинный двигатель содержит, по меньшей мере, одну линию связи с другим аналогичным газотурбинным двигателем для передачи режима их вращающегося ротора, в котором для включения функции ATTCS упомянутого газотурбинного двигателя средства сравнения модуля включения конфигурированы с возможностью сравнения, по меньшей мере, одного значения превышения скорости, полученного от упомянутого газотурбинного двигателя, со значением режима упомянутого другого газотурбинного двигателя, полученным через линию связи. Функция ATTCS позволяет сравнить режимы вращения роторов двух газотурбинных двигателей, чтобы обнаружить возможную асимметрию тяги. Поскольку регулирование не зависит от функции защиты ATTCS, надежность мониторинга газотурбинного двигателя повышается.
Объектом изобретения является также способ мониторинга газотурбинного двигателя летательного аппарата, содержащего, по меньшей мере, один ротор, вращающийся в режиме N1, при этом способ содержит:
- этап получения первого измерения режима ротора по первому каналу измерения регулирования режима N1 системы мониторинга и, по меньшей мере, одного второго измерения режима ротора по второму каналу измерения регулирования упомянутой системы мониторинга, независимого от первого канала измерения;
- этап сравнения упомянутого полученного измерения режима с заданным значением тяги для определения состояния тяги;
- этап получения первого значения превышения скорости ротора по первому каналу обнаружения превышения скорости системы защиты от превышения скорости, выполненной с возможностью предупреждения выброса остатков с высокой энергией за пределы упомянутого газотурбинного двигателя, и второго значения превышения скорости ротора по второму каналу обнаружения превышения скорости этой же системы защиты, независимому от первого канала обнаружения превышения скорости, и
- этап включения функции защиты «от превышения тяги» или «от падения тяги» газотурбинного двигателя, на котором используют оба полученных значения превышения скорости для сравнения измерения превышения скорости, по меньшей мере, с одним контрольным режимом, определенным в зависимости от включаемой функции защиты.
В варианте осуществления способа, содержащем два первых вышеупомянутых этапа, два последних этапа, указанных в первом варианте, заменены на:
- этап получения значения превышения скорости ротора, по меньшей мере, по одному каналу измерения превышения скорости, независимому от каналов измерения регулирования, системы защиты от превышения скорости, выполненной с возможностью предупреждения выброса остатков с высокой энергией за пределы упомянутого газотурбинного двигателя, и
- этап включения функции защиты «от превышения тяги» или «от падения тяги» газотурбинного двигателя посредством сравнения упомянутого полученного значения превышения скорости, по меньшей мере, с одним контрольным режимом, определенным в зависимости от включаемой функции защиты.
Краткое описание чертежей
Изобретение будет более очевидно из нижеследующего описания, представленного исключительно в качестве примера, со ссылками на прилагаемые чертежи, на которых:
Фиг. 1 (уже прокомментирована) схематично иллюстрирует надежность известной системы мониторинга газотурбинного двигателя для включения функции UHT.
Фиг. 2 (уже прокомментирована) схематично иллюстрирует надежность известной системы мониторинга газотурбинного двигателя для включения функции ATTCS.
Фиг. 3 (уже прокомментирована) схематично иллюстрирует надежность известной системы мониторинга газотурбинного двигателя для включения функции ATTCS в аварийном режиме.
Фиг. 4 (уже прокомментирована) схематично иллюстрирует надежность известной системы мониторинга газотурбинного двигателя для включения функции UHT в аварийном режиме.
Фиг. 5 схематично иллюстрирует надежность заявленной системы мониторинга газотурбинного двигателя для включения функции UHT.
Фиг. 6 схематично иллюстрирует надежность заявленной системы мониторинга газотурбинного двигателя для включения функции UHT в аварийном режиме.
Фиг. 7 схематично иллюстрирует надежность заявленной системы мониторинга газотурбинного двигателя для включения функции ATTCS.
Фиг. 8 схематично иллюстрирует надежность заявленной системы мониторинга газотурбинного двигателя для включения функции ATTCS в аварийном режиме.
Фиг. 9 - схема заявленной системы мониторинга газотурбинного двигателя для включения функции UHT или ATTCS в аварийном режиме.
Описание предпочтительных вариантов воплощения
Необходимо заметить, что фигуры детально иллюстрируют изобретения для его применения, при этом, разумеется, упомянутые фигуры могут также, в случае необходимости, служить для характеристики изобретения.
Изобретение будет описано для двухконтурного турбореактивного двигателя, но его можно применять для любого авиационного газотурбинного двигателя, содержащего, по меньшей мере, один вращающийся ротор.
В этом примере двухконтурный турбореактивный двигатель содержит ротор низкого давления и ротор высокого давления, при этом режим вращения ротора низкого давления известен специалисту под обозначением режима N1. Как было указано выше, мониторинг режима N1 обеспечивает срабатывание нескольких функций защиты турбореактивного двигателя в случае обнаружения аномалии.
Как показано на фиг. 5-8, турбореактивный двигатель содержит систему 1 мониторинга, которая включает в себя модуль регулирования REG режима N1, предназначенный для регулирования режима турбореактивного двигателя в зависимости от значения N1cons, задаваемого пилотом летательного аппарата, и модуль включения ENG функции защиты, чтобы исправлять нарушение в работе турбореактивного двигателя, возникающее в режиме N1 турбореактивного двигателя.
Модуль регулирования REG режима N1
Модуль регулирования REG системы 1 мониторинга является модулем регулирования, аналогичным известному модулю, который содержит первый канал А измерения регулирования, выполненный с возможностью получения измерения N1А режима N1, и второй канал В измерения регулирования, выполненный с возможностью получения измерения N1В режима N1.
Модуль регулирования REG системы 1 мониторинга дополнительно содержит средства сравнения 2А, 2В полученных измерений режима N1А, N1В с заданным значением тяги N1cons для получения на выходе состояния тяги EREG турбореактивного двигателя. Как показано на фиг. 5-8, логический порт И (обозначение Е2) позволяет консолидировать данные, определенные средствами сравнения 2А, 2В.
Например, если заданное значение тяги N1cons равно 4000 об/мин и полученные измерения режима N1А, N1В соответственно равны 2000 об/мин и 1000 об/мин, модуль регулирования REG выдает состояние тяги EREG, указывающее на падение тяги турбореактивного двигателя. Если бы падение тяги показал только канал А измерения регулирования, то состояние тяги EREG не показало бы падения тяги (порт И между двумя каналами А, В).
Классически, каждый канал измерения регулирования А, В содержит свои собственные средства считывания и свои собственные датчики режима. Модуль регулирования REG классически представляет собой вычислительное устройство регулирования типа FADEC, установленное на турбореактивном двигателе.
Модуль включения функции защиты
Согласно изобретению, модуль включения ENG защитной функции типа UHT или ATTCS не зависит от каналов измерения регулирования А, В модуля регулирования REG. Действительно, согласно изобретению, включение функции защиты зависит от измерений превышения скорости ротора турбореактивного двигателя, чтобы избегать выброса фрагментов с высокой энергией за пределы газотурбинного двигателя и, в частности, в сторону летательного аппарата, на котором установлен турбореактивный двигатель.
Классически защиту от превышения скорости применяют при помощи электронной системы защиты, которая не зависит от системы 1 мониторинга, обеспечивающей регулирование и включение защитных функций UHT и ATTCS. Система защиты от превышения скорости известна, например, из патентной заявки FR2960906, поданной компанией СНЕКМА.
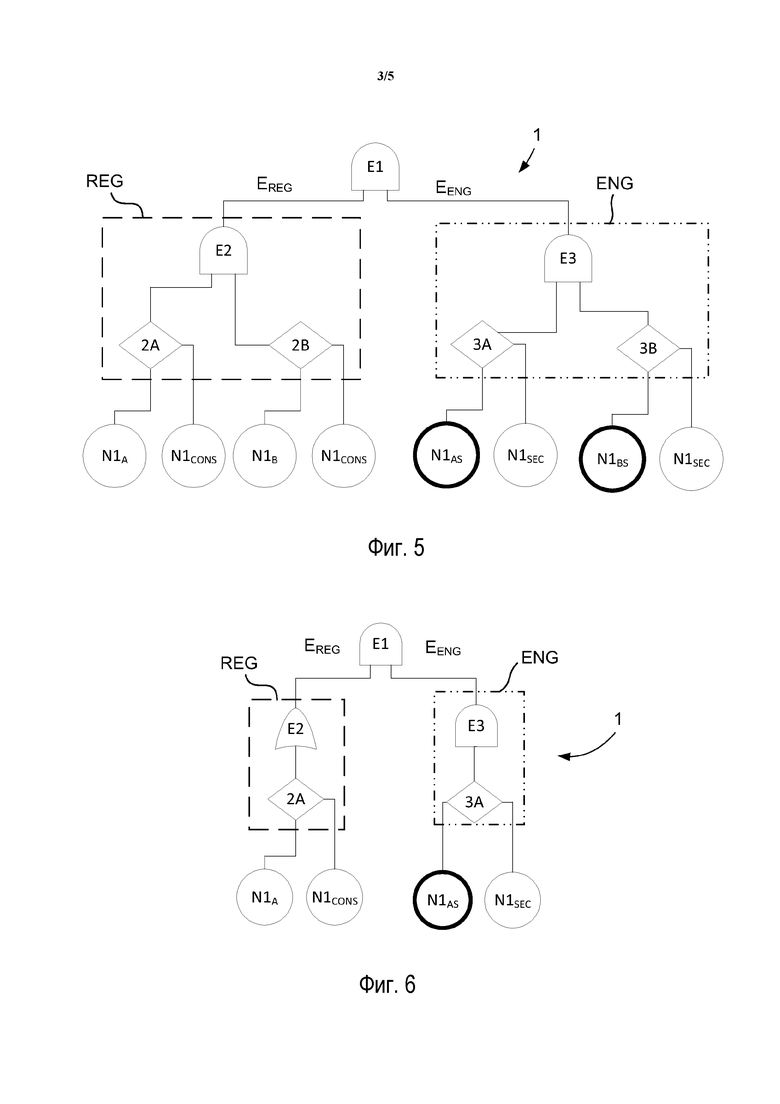
Как известно, превышение скорости ротора низкого давления турбореактивного двигателя обнаруживают через первый канал AS обнаружения превышения скорости и через второй канал BS обнаружения превышения скорости, чтобы избегать выброса фрагментов с высокой энергией за пределы турбореактивного двигателя. Классически, каждый канал AS, BS обнаружения превышения скорости содержит свои собственные средства считывания и свои собственные датчики режима. Каналы AS, BS обнаружения превышения скорости соответственно выполнены с возможностью получения значений превышения скорости N1As, N1Bs ротора газотурбинного двигателя, как показано на фиг. 5-8.
Согласно изобретению, каналы AS, BS обнаружения превышения скорости системы защиты от превышения скорости связаны с модулем включения ENG функции защиты. Таким образом, значения превышения скорости N1As, N1Bs, являющиеся значениями режима вращения ротора низкого давления, служат основанием для включения защитной функции и не зависят от режима N1А, N1В, полученного для модуля регулирования REG, что повышает надежность системы 1 мониторинга.
Классически, модуль включения ENG содержит средства сравнения 3А, 3В, выполненные с возможностью сравнения полученных значений превышения скорости N1As, N1Bs, по меньшей мере, с одним контрольным режимом, который определяют в зависимости от включаемой защитной функции (UHT, ATTCS), как будет показано ниже.
Включение функции защиты UHT
Как показано на фиг. 5, для включения функции защиты UHT каждое из значений превышения скорости N1As, N1Bs, полученных при помощи системы защиты от превышения скорости, сравнивают с заданным предельным значением N1SEC, начиная от которого включается защитная функция UHT. Заданное предельное значение N1SEC для функции UHT аналогично заданному предельному значению, применяемому в известных решениях, и соответствует максимальному режиму, допустимому для турбореактивного двигателя до активации функции UHT. Когда активируют функцию UHT, питание турбореактивного двигателя топливом прекращается.
Как показано на фиг. 5, когда модуль включения ENG обнаруживает превышение тяги путем сравнения значений превышения скорости N1As, N1Bs с предельным заданным значением N1SEC, он включает функцию защиты UHT (EENG=UHT АКТИВНАЯ), чтобы избежать асимметрии тяги летательного аппарата. Поскольку принятие решения о включении функции защиты UHT не зависит от модуля регулирования REG, надежность системы 1 мониторинга повышается. Соответственно, функция защиты UHT может быть включена, тогда как состояние тяги EREG не показывает превышения тяги.
Например, как показано на фиг. 6, все каналы В системы мониторинга вышли из строя и находятся в аварийном режиме, то есть как канал В измерения регулирования, так и канал BS измерения превышения скорости. Благодаря системе 1 мониторинга в соответствии с изобретением, модули регулирования REG и включения ENG располагают независимыми данными режима N1 для определения состояния тяги и активности функции UHT, что повышает надежность системы 1 мониторинга, и, как показано на фиг. 6, отдельная неисправность не может привести к опасному событию.
Включение функции защиты ATTCS
В нижеследующем примере выполнения первый турбореактивный двигатель и второй турбореактивный двигатель в соответствии с изобретением установлены на летательном аппарате. Каждый турбореактивный двигатель содержит, по меньшей мере, одну линию связи с другим турбореактивным двигателем для обеспечения диалога между турбореактивными двигателями. Линия связи позволяет передавать значение режима N1 на другой турбореактивный двигатель, чтобы функция ATTCS могла устранить асимметрию тяги. В этом примере оба турбореактивных двигателя соединены линией связи типа ARINC, но, само собой разумеется, что можно применять и другие средства связи.
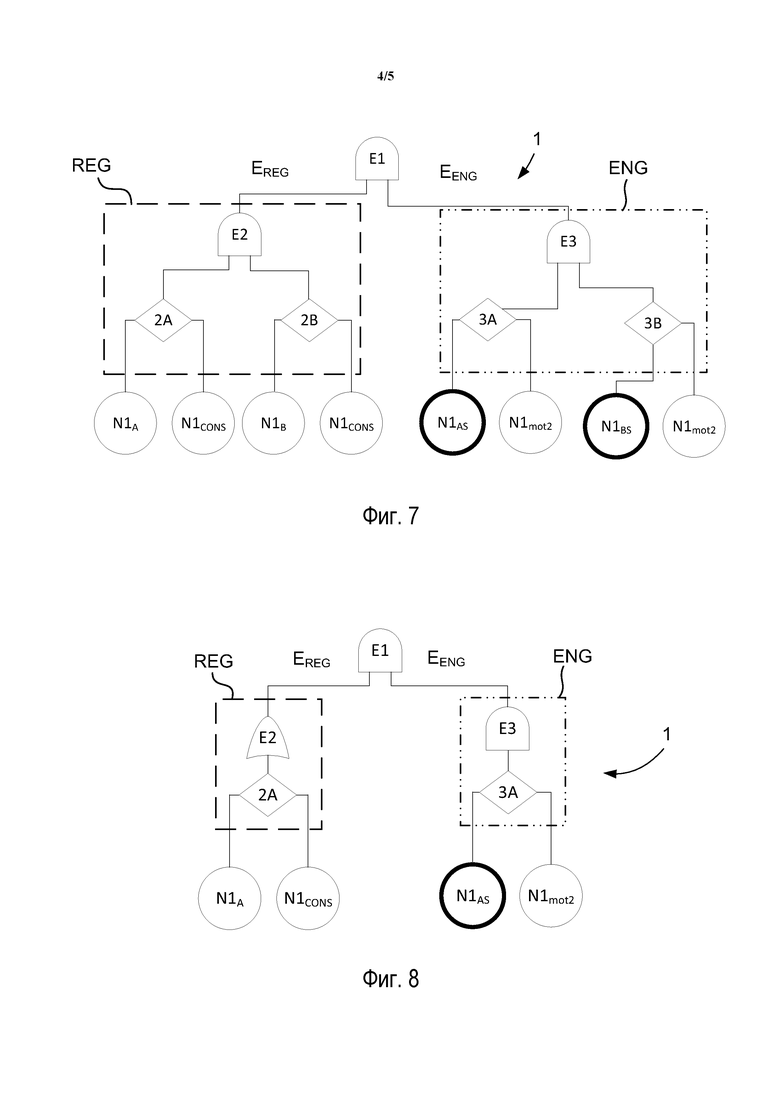
Каждый турбореактивный двигатель содержит систему защиты от превышения скорости и систему 1 мониторинга со своим собственным модулем регулирования REG и своим собственным модулем включения ENG. Как показано на фиг. 7, чтобы включить функцию защиты ATTCS на первом турбореактивном двигателе, каждое из полученных значений превышения скорости N1As, N1Bs первого турбореактивного двигателя сравнивают с контрольным режимом, который соответствует консолидированному режиму N1mot2 модуля регулирования REG второго турбореактивного двигателя. В этом примере консолидированный режим N1mot2 получают путем обработки режимов, измеренных при помощи каналов включения А, В модуля регулирования REG второго турбореактивного двигателя.
Иначе говоря, первый турбореактивный двигатель располагает значением режима вращения N1mot2 ротора низкого давления второго турбореактивного двигателя. Как показано на фиг. 7, благодаря средствам сравнения 3А, 3В режимов турбореактивных двигателей, можно обнаруживать асимметрию тяги между двумя турбореактивными двигателями. Аналогично включению функции UHT, благодаря системе 1 мониторинга в соответствии с изобретением, модули регулирования REG и включения ENG располагают независимыми данными режима N1 для определения состояния тяги и активности функции ATTCS, что повышает надежность системы 1 мониторинга, при этом отдельная неисправность не может привести к опасному событию. Это же касается и включения функции ATTCS в аварийном режиме, как показано на фиг. 8.
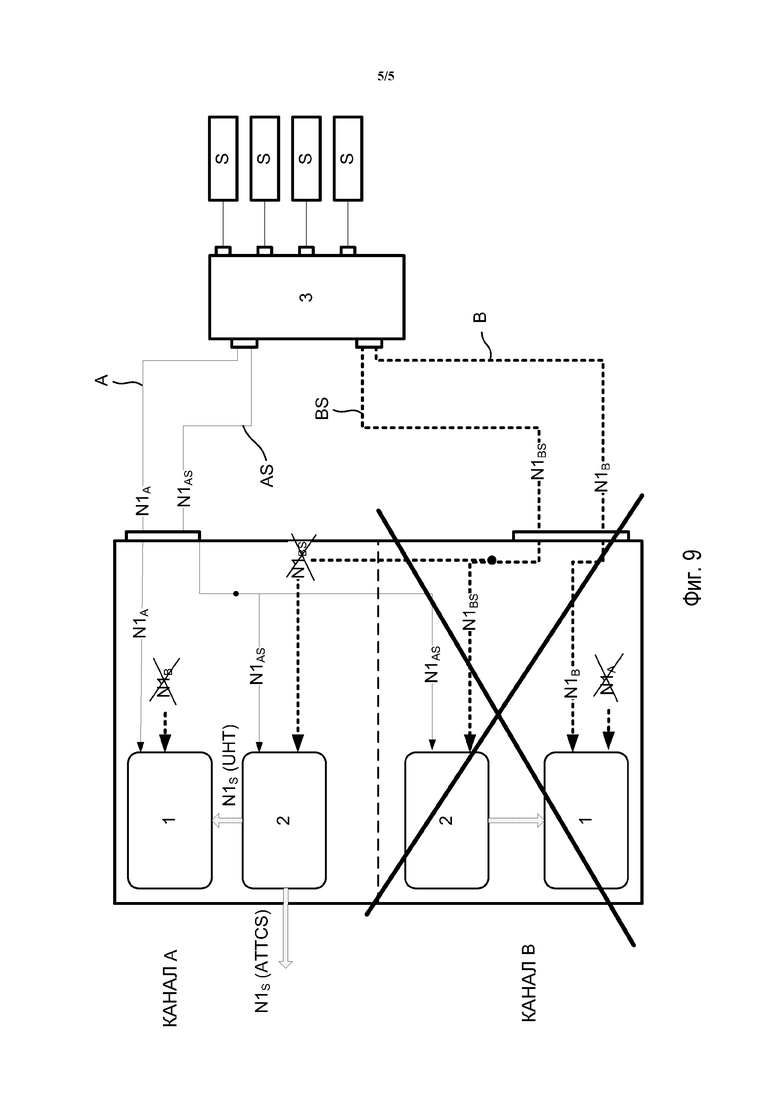
Электронное устройство для мониторинга летательного аппарата схематично показано на фиг. 9. Это электронное устройство представляет собой вычислительное устройство, например, типа FADEC, и содержит систему 1 мониторинга и систему 2 защиты. Для большей ясности каналы A системы 1 мониторинга показаны в верхней части вычислительного устройства, тогда как каналы В системы 1 мониторинга показаны в нижней части вычислительного устройства.
На входе вычислительное устройство получает измерения режима N1А, N1В через каналы А, В регулирования и получает измерения превышения скорости N1As, N1Bs через каналы AS, BS измерения превышения скорости, как показано на фиг. 9. Эти измерения режима и превышения скорости осуществляют измерительные датчики S через посредство системы 3 считывания, например, устройства FPGA от «field-programmable gate array». Измерительные датчики S и система 3 считывания выполнены таким образом, чтобы измерения режима N1А, N1В и превышения скорости N1As, N1Bs происходили независимо.
Вычислительное устройство показано на фиг. 9 в аварийном режиме, при этом все каналы B измерения неисправны. Неисправность визуально показана в виде перечеркнутой нижней части вычислительного устройства. С учетом неисправности система 1 мониторинга получает для своего модуля регулирования REG только одно измерение режима N1А, а измерение режима N1В отсутствует. Для своего модуля включения ENG система 1 мониторинга получает только одно измерение превышения скорости N1As от системы 2 защиты, которое в данном случае равно измерению превышения скорости N1As, измеренному на канале A системы 2 защиты, при этом измерение режима N1Bs отсутствует по причине неисправности.
Как показано на этой же фиг. 9, измерения режима N1А и превышения скорости N1As поступают в систему 1 мониторинга. Как было указано выше, модуль регулирования REG системы 1 мониторинга сравнивает измерение режима N1А с заданным режимом N1cons, не показанным на фиг. 9. Модуль включения ENG системы 1 мониторинга сравнивает значение превышения скорости N1S, полученное от системы 2 защиты, с заданным предельным значением N1SEC для включения функции UHT, не показанной на фиг. 9. Что касается функции ATTCS, значение превышения скорости N1S, полученное от системы 2 защиты, сравнивают с режимом ротора другого газотурбинного двигателя. Соответственно, как показано на фиг. 9, система 2 защиты передает значение превышения скорости N1S во второй турбореактивный двигатель через линию связи, чтобы второй турбореактивный двигатель тоже мог применить функцию ATTCS.
Благодаря изобретению, надежность системы мониторинга повышается при любых обстоятельствах, в частности, в аварийном режиме, что обеспечивает повышенную безопасность турбореактивного двигателя и лучшее использование летательного аппарата, на котором установлен турбореактивный двигатель.
Предпочтительно система 1 мониторинга и система 2 защиты являются электронными системами, которые предпочтительно являются независимыми, однако, разумеется, они могут быть объединены внутри одного вычислительного устройства. Аналогично, модули включения и регулирования тоже являются электронными модулями.
| название | год | авторы | номер документа |
|---|---|---|---|
| ГАЗОТУРБИННЫЙ ДВИГАТЕЛЬ | 2013 |
|
RU2556090C2 |
| СПОСОБ ЗАЩИТЫ ГАЗОТУРБИННОГО ДВИГАТЕЛЯ ОТ ПОМПАЖА КОМПРЕССОРА | 2023 |
|
RU2801768C1 |
| СПОСОБ ЭКСПЛУАТАЦИИ ГАЗОТУРБИННОГО ДВИГАТЕЛЯ И ГАЗОТУРБИННЫЙ ДВИГАТЕЛЬ, ЭКСПЛУАТИРУЕМЫЙ ЭТИМ СПОСОБОМ | 2013 |
|
RU2544632C1 |
| Способ защиты газотурбинного двигателя от помпажа | 2022 |
|
RU2798129C1 |
| Способ автоматической защиты газотурбинного двигателя от помпажа | 2022 |
|
RU2789806C1 |
| СПОСОБ ЗАЩИТЫ ГАЗОТУРБИННОГО ДВИГАТЕЛЯ ОТ РАСКРУТКИ ЕГО РОТОРОВ С ПОМОЩЬЮ АВТОНОМНОГО БЛОКА ЗАЩИТЫ | 2023 |
|
RU2819128C1 |
| СПОСОБ И УСТРОЙСТВО ОБНАРУЖЕНИЯ ВРАЩАЮЩЕГОСЯ СРЫВА ПОТОКА В КОМПРЕССОРЕ ГАЗОТУРБИННОГО ДВИГАТЕЛЯ И ГАЗОТУРБИННЫЙ ДВИГАТЕЛЬ | 2011 |
|
RU2577921C2 |
| ГАЗОТУРБИННЫЙ ДВИГАТЕЛЬ | 2013 |
|
RU2544414C1 |
| СПОСОБ ЗАЩИТЫ ГАЗОТУРБИННОГО ДВИГАТЕЛЯ ОТ ПОМПАЖА КОМПРЕССОРА ЭЛЕКТРОННОЙ ДВУХКАНАЛЬНОЙ СИСТЕМОЙ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ | 2023 |
|
RU2810867C1 |
| СПОСОБ КАПИТАЛЬНОГО РЕМОНТА ГАЗОТУРБИННОГО ДВИГАТЕЛЯ (ВАРИАНТЫ) И ГАЗОТУРБИННЫЙ ДВИГАТЕЛЬ, ОТРЕМОНТИРОВАННЫЙ ЭТИМ СПОСОБОМ (ВАРИАНТЫ), СПОСОБ КАПИТАЛЬНОГО РЕМОНТА ПАРТИИ, ПОПОЛНЯЕМОЙ ГРУППЫ ГАЗОТУРБИННЫХ ДВИГАТЕЛЕЙ И ГАЗОТУРБИННЫЙ ДВИГАТЕЛЬ, ОТРЕМОНТИРОВАННЫЙ ЭТИМ СПОСОБОМ | 2013 |
|
RU2555932C2 |
Изобретения включают газотурбинный двигатель летательного аппарата и способы мониторинга газотурбинного двигателя /варианты/. Газотурбинный двигатель содержит средства, выполненные с возможностью выдачи по меньшей мере одного измерения превышения скорости, когда один из каналов измерения вышел из строя, а также по меньшей мере одно средство сравнения измерения превышения скорости по меньшей мере с одним контрольным режимом, определенным в зависимости от включенной функции защиты. При этом модуль включения конфигурирован с возможностью включения функции защиты от «превышения тяги», «от падения тяги» в зависимости от результатов сравнения. Технический результат – повышение надежности системы мониторинга при любых обстоятельствах, в частности в аварийном режиме. 3 н. и 5 з.п. ф-лы, 9ил.
1. Газотурбинный двигатель летательного аппарата, содержащий по меньшей мере один ротор, вращающийся в режиме N1, и систему (1) мониторинга, содержащую:
- модуль регулирования (REG), содержащий по меньшей мере первый канал (A) измерения регулирования, выполненный с возможностью получения измерения (N1А) режима N1, и второй канал (B) измерения регулирования, независимый от первого канала измерения, выполненный с возможностью получения измерения (N1В) режима N1, и средства сравнения полученных измерений (N1А, N1В) режима с заданным значением тяги (N1cons) для получения состояния тяги (ЕREG); и
- модуль включения (ENG) функции защиты типа "от превышения тяги" или "от падения тяги" газотурбинного двигателя,
при этом газотурбинный двигатель дополнительно содержит систему (2) защиты от превышения скорости, чтобы препятствовать вылету остатков с высокой энергией за пределы упомянутого газотурбинного двигателя, при этом система (2) защиты содержит по меньшей мере один канал (AS, BS) измерения превышения скорости, выполненный с возможностью получения значения превышения скорости (N1AS, N1BS) вращающегося ротора газотурбинного двигателя, при этом газотурбинный двигатель отличается тем, что содержит средства, выполненные с возможностью выдачи по меньшей мере одного измерения превышения скорости на основании полученного значения превышения скорости (N1AS, N1BS), когда один из каналов (А, В) измерения регулирования вышел из строя, и тем, что модуль включения (ENG) содержит по меньшей мере одно средство сравнения упомянутого измерения превышения скорости по меньшей мере с одним контрольным режимом, определенным в зависимости от включаемой функции защиты, при этом упомянутый модуль включения (ENG) конфигурирован с возможностью включения упомянутой функции защиты ("от превышения тяги", "от падения тяги") в зависимости от результатов сравнения.
2. Газотурбинный двигатель по п. 1, в котором система (2) защиты от превышения скорости содержит первый канал (AS) обнаружения превышения скорости, выполненный с возможностью получения значения превышения скорости (N1AS) ротора газотурбинного двигателя, и второй канал (BS) обнаружения превышения скорости, независимый от первого канала (AS) обнаружения превышения скорости, выполненный с возможностью получения значения превышения скорости (N1BS) ротора газотурбинного двигателя, при этом модуль включения содержит средства сравнения двух полученных значений превышения скорости (N1AS, N1BS) с контрольным режимом, определенным в зависимости от включаемой функции защиты.
3. Газотурбинный двигатель по п. 1, в котором система (2) защиты от превышения скорости содержит первый канал (AS) обнаружения превышения скорости, выполненный с возможностью получения значения превышения скорости (N1AS) ротора газотурбинного двигателя, и второй канал (BS) обнаружения превышения скорости, независимый от первого канала (AS) обнаружения превышения скорости, выполненный с возможностью получения значения превышения скорости (N1BS) ротора газотурбинного двигателя, при этом система (2) защиты от превышения скорости конфигурирована с возможностью выдачи консолидированного значения превышения скорости (N1S) в модуль включения (ENG) системы (1) мониторинга в зависимости от значений превышения скорости (N1AS, N1BS), полученных на каналах (AS, BS) измерения превышения скорости, при этом модуль включения содержит средства сравнения консолидированного превышения скорости (N1S) с контрольным режимом, определенным в зависимости от включаемой функции защиты.
4. Газотурбинный двигатель по п. 1, в котором канал (AS, BS) измерения превышения скорости не зависит от канала (A, B) измерения режима.
5. Газотурбинный двигатель по п. 1, в котором для включения функции защиты "от превышения тяги" газотурбинного двигателя средства сравнения модуля включения (ENG) конфигурированы с возможностью сравнения по меньшей мере одного полученного значения превышения скорости (N1AS, N1BS) с предельным режимом (NSEC), соответствующим превышению тяги, максимально допустимому для газотурбинного двигателя.
6. Газотурбинный двигатель по п. 1, содержащий по меньшей мере одну линию связи с другим аналогичным газотурбинным двигателем для передачи значения режима их вращающегося ротора, в котором для включения функции защиты "от падения тяги" упомянутого газотурбинного двигателя средства сравнения модуля включения (ENG) конфигурированы с возможностью сравнения по меньшей мере одного значения превышения скорости (N1AS, N1BS), полученного от упомянутого газотурбинного двигателя, с значением режима (Nmot2) упомянутого другого газотурбинного двигателя, полученного через линию связи.
7. Способ мониторинга газотурбинного двигателя летательного аппарата, содержащего по меньшей мере один ротор, вращающийся в режиме N1, при этом способ содержит:
- этап получения первого измерения режима (N1A) ротора по первому каналу (А) измерения регулирования режима N1 системы мониторинга и по меньшей мере одного второго измерения режима (N1B) ротора по второму каналу (В) измерения регулирования упомянутой системы мониторинга, независимому от первого канала измерения;
- этап сравнения полученных измерений режима с заданным значением тяги (N1cons) для определения состояния тяги (ЕREG);
- этап получения первого значения превышения скорости (N1AS) ротора по первому каналу (AS) обнаружения превышения скорости системы (2) защиты от превышения скорости, выполненной с возможностью предупреждения выброса остатков с высокой энергией за пределы упомянутого газотурбинного двигателя, и второго значения превышения скорости (N1BS) ротора газотурбинного двигателя по второму каналу (BS) обнаружения превышения скорости этой же системы (2) защиты, независимому от первого канала (AS) обнаружения превышения скорости, и
- этап включения функции защиты "от превышения тяги" или "от падения тяги" газотурбинного двигателя, на котором используют оба полученных значения превышения скорости (N1AS, N1BS) для сравнения измерения превышения скорости по меньшей мере с одним контрольным режимом, определенным в зависимости от включаемой функции защиты.
8. Способ мониторинга газотурбинного двигателя летательного аппарата, содержащего по меньшей мере один ротор, вращающийся в режиме N1, при этом способ содержит:
- этап получения первого измерения режима (N1A) ротора по первому каналу (А) измерения регулирования режима N1 системы мониторинга и по меньшей мере одного второго измерения режима (N1B) ротора по второму каналу (В) измерения регулирования упомянутой системы мониторинга, независимому от первого канала измерения;
- этап сравнения полученных измерений режима с заданным значением тяги (N1cons) для определения состояния тяги (ЕREG);
- этап получения значения превышения скорости (N1AS, N1BS) ротора по меньшей мере по одному каналу (AS, BS) измерения превышения скорости, независимому от каналов (A, B) измерения регулирования системы (2) защиты от превышения скорости, выполненной с возможностью предупреждения выброса остатков с высокой энергией за пределы упомянутого газотурбинного двигателя, и
- этап включения функции защиты "от превышения тяги" или "от падения тяги" газотурбинного двигателя посредством сравнения упомянутого полученного значения превышения скорости (N1AS, N1BS) по меньшей мере с одним контрольным режимом, определенным в зависимости от включаемой функции защиты.
| УСТРОЙСТВО ДЛЯ ПОДРЕЗАНИЯ БЛОКОВ ГОРНЫХ ПОРОД ЭЛЕКТРИЧЕСКИМИ РАЗРЯДАМИ | 2010 |
|
RU2427711C1 |
| FR2960906A1,09.12.2011 | |||
| СПОСОБ ОПРЕДЕЛЕНИЯ И ИДЕНТИФИКАЦИИ БИОЛОГИЧЕСКИХ МИКРООБЪЕКТОВ И ИХ НАНОКОМПОНЕНТОВ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2008 |
|
RU2406078C2 |
| US3987620A,26.10.1976 | |||
| Привод электрического коммутационного аппарата | 1971 |
|
SU471623A1 |
| УСТРОЙСТВО ПИТАНИЯ ТОПЛИВОМ ГАЗОТУРБИННОГО ДВИГАТЕЛЯ С РЕГУЛИРУЕМЫМ РАСХОДОМ ТОПЛИВА | 2006 |
|
RU2398124C2 |
| Вибратор | 1953 |
|
SU102687A1 |

