Изобретение относится к области газотурбинного двигателестроения и может быть использовано в системах аварийной защиты авиационных двухконтурных двухвальных двигателей, в силовых газотурбинных установках для морских и речных судов, газотурбинных электростанций, газотурбинных нагнетателей магистральных газопроводов и т.д.
В процессе эксплуатации газотурбинных двигателей иногда наблюдаются случаи забросов частоты вращения роторов. Возможными причинами таких забросов являются нелокализованные отказы исполнительных механизмов дозирования топлива, приводящие к самопроизвольному увеличению расхода топлива GT в камеру сгорания и которые система автоматического управления двигателем сама парировать не может. В некоторых случаях самопроизвольное увеличение GT может носить настолько значимый и мгновенный характер (ΔGt ≥ 1000 кг/час за 1…3 сек), что экипаж практически не располагает временем на анализ показаний мониторов и поэтому не может оперативно повлиять на ситуацию.
К наиболее опасным последствиям чрезмерной раскрутки роторов относится механическая поломка вращающихся деталей двигателя и вылет за пределы корпуса двигателя нелокализованных фрагментов ротора с высокой кинетической энергией. В этой связи для обеспечения безопасности полетов и безаварийной работы турбомашин востребовано применение автономных блоков защиты двигателя от раскрутки его роторов. Вместе с этим актуально, чтобы указанные автономные блоки защиты сами имели высокую надежность и не допускали случаев своих ложных срабатываний, поскольку это зачастую связано с выключением двигателя в полете.
Известен способ управления газотурбинным двигателем (Патент RU 2417326), заключающийся в том, что дополнительно к штатной электронно-гидромеханической системе автоматического управления двигателем с помощью автономного электронного блока измеряют и контролируют частоту вращения ротора вентилятора двигателя, частоту вращения турбины вентилятора двигателя, и если рассогласование между частотой вращения ротора вентилятора и частотой вращения турбины вентилятора превышает наперед заданное значение, или ускорение турбины вентилятора превышает наперед заданное значение, или частота вращения турбины вентилятора превышает наперед заданное значение, с помощью автономного электронного блока прекращают подачу топлива в камеру сгорания и выключают двигатель.
Недостатком данного способа является то, что в случае ошибочных измерений частоты вращения ротора двигателя, например, из-за переменного контакта в электропроводке датчика частоты или сбоя в работе устройства обработки сигнала датчика, возможно ложное срабатывание автономного блока защиты и выключение двигателя в полете.
Указанный недостаток также присущ другому аналогу, принятому во внимание, - способу защиты судовой газотурбинной установки из-за раскрутки ее силовой турбины, обеспечивающей привод судового винта (Патент RU 2493393).
В качестве прототипа выбран способ работы автономного блока защиты двигателя газотурбинной установки (ГТУ), заключающийся в измерении частоты вращения турбины с помощью четырех модулей автономного блока и измерении температуры газов в камере сгорания с помощью двух других модулей автономного блока, в сравнении измеренных величин с заранее установленными пороговыми значениями, и при превышении измеренных величин пороговых значений с помощью автономного блока защиты двигателя формируют аварийный сигнал для останова газотурбинной установки (Патент RU 2 776 229).
К недостаткам способа относится:
- потенциально низкая надежность датчиков температуры газов в камере сгорания двигателя, связанная с их эксплуатацией в условиях экстремальных температур. Кроме того, замена отказавшего датчика температуры газов приводит к необходимости останова двигателя для ремонта и выведение ГТУ из эксплуатации, что экономически нецелесообразно;
- наличие повышенного количества ложных остановов ГТУ, т.к. срабатывание автономного блока защиты двигателя происходит по любому превышению частоты вращения. Действительно, если три независимых и исправно работающих канала частоты не показали заброса частоты турбины, а четвертый канал зафиксировал заброс, то останов ГТУ не представляется обоснованным;
- низкий уровень полноты и глубины контроля работы автономного блока защиты. Из описания прототипа следует, что самодиагностика блока предусматривает только контроль измерительных каналов блока, а сам вычислитель и исполнительный механизм фактически остаются вне специализированного функционального контроля, необходимого для выполнения столь важной задачи. Кроме того, самодиагностика осуществляется только по включении электропитания блока, таким образом, при штатной эксплуатации работа автономного блока защиты носит недостаточно контролируемый характер;
- не конкретизирована работа автономного блока защиты применительно к двухвальным (двухроторным) газотурбинным двигателям.
Технической проблемой, решение которой обеспечивается при осуществлении предлагаемого изобретения и невозможно обеспечить при использовании прототипа, является пониженная функциональная надежность автономного блока защиты двигателя, низкий уровень встроенного контроля системы аварийной защиты, что в целом может оказать негативное влияние на безопасность полета.
Технической задачей изобретения является повышение функциональной надежности аварийной защиты турбореактивного двухконтурного двухвального двигателя от раскрутки его роторов, повышение полноты и глубины контроля работы автономного блока защиты, исключение его возможных ложных срабатываний.
Техническая проблема решается тем, что в способе защиты газотурбинного двигателя от раскрутки его роторов, заключающийся в том, что с помощью автономного блока защиты измеряют частоту вращения роторов двигателя, сравнивают измеренные значения частоты вращения роторов с заранее установленными предельными значениями, и если измеренные значения частот вращения роторов превышают заранее установленные предельные значения, то с помощью автономного блока защиты формируют управляющий сигнал на электромагнитный клапан прекращения подачи топлива в двигатель, согласно изобретению, в составе автономного блока защиты предусматривают два независимых канала управления (первый и второй каналы), электрически соединенных между собой через межканальный обмен кодовой информации, при этом в каждом канале управления осуществляют независимое измерение частоты вращения ротора низкого давления nрнд и частоты вращения ротора высокого давления nрвд турбореактивного двухконтурного двухвального двигателя, сравнение измеренного значения частоты nрнд с заранее установленными предельными значениями nрндпред1 и nрндпред2, сравнение измеренного значения частоты nрвд с заранее установленными предельными значениями првдпред1 и nрвдпред2, кроме того в автономный блок защиты двигателя дополнительно вводят модуль встроенного контроля с помощью которого осуществляют постоянный контроль работоспособности каждого канала блока защиты двигателя, контроль работоспособности всех датчиков частоты вращения nрнд и nрвд, контроль исправности электромагнитного клапана прекращения подачи топлива в двигатель и при одновременном превышении частот вращений роторов nрнд≥nрндпред1 и nрвд≥nрвдпред1 или при одновременном превышении частот вращений роторов nрвд≥nрвдпред2 и nрнд≥nрндпред2 в каждом канале автономного блока защиты и отсутствии выявленных отказов модулем встроенного контроля осуществляют включение электромагнитного клапана прекращения подачи топлива в двигатель, формирование и передачу кодового сигнала «Останов двигателя по раскрутке» из каждого канала автономного блока.
Кроме того, согласно изобретению, включение электромагнитного клапана прекращения подачи топлива в двигатель осуществляют по двухпроводной схеме путем коммутации в автономном блоке защиты электрических цепей «+28 В» и «0 В» соответственно первым и вторым каналом автономного блока защиты.
Кроме того, согласно изобретению, коммутацию электрической цепи «+28 В» в первом канале автономного блока защиты и коммутацию электрической цепи «0 В» во втором канале автономного блока защиты осуществляют в каждом из каналов независимо от соседнего канала.
Кроме того, согласно изобретению, после подтверждения идентификации (определения) раскрутки роторов во втором канале, переданном в первый канал через межканальный обмен; а также после подтверждения идентификации раскрутки роторов в первом канале, переданном во второй канал через межканальный обмен, электрические цепи «+28 В» и «0 В» блокируются в скоммутированном состоянии; при этом при отсутствии подтверждения идентификации раскрутки роторов в одном из каналов блокировка коммутации электрической цепи не включается.
Кроме того, согласно изобретению, в модуле встроенного контроля блока защиты двигателя осуществляют постоянный контроль входной информации от всех датчиков измерения частоты вращения ротора низкого давления nрнд и всех датчиков измерения частоты вращения ротора высокого давления nрвд, контроль целостности электрических цепей всех датчиков измерения nрнд и nрвд, контроль вычислительной части каждого канала блока защиты, контроль межканального (межпроцессорного) обмена, контроль исправности электрической части канала управления электромагнитного клапана прекращения подачи топлива в двигатель; формирование и выдачу соответствующего кодового сигнала отказа в канал блока защиты, где был выявлен отказ, также выдачу этого соответствующего кодового сигнала отказа в бортовую систему регистрации параметров двигателя.
Кроме того, согласно изобретению, в качестве датчиков частоты вращения роторов используют бесприводные магнитоиндукционные датчики.
Кроме того, согласно изобретению, в качестве бесприводных магнитоиндукционных датчиков используют датчики типа ДЧВ-16М.
Кроме того, согласно изобретению, постоянный контроль информации от датчиков измерения частоты вращения ротора низкого давления nрнд и датчиков измерения частоты вращения ротора высокого давления nрвд предусматривает постоянный допусковый контроль работы каждого датчика измерения nрнд и nрвд и постоянный перекрестный контроль результатов измерений параметров nрнд и nрвд между различными каналами автономного блока защиты двигателя.
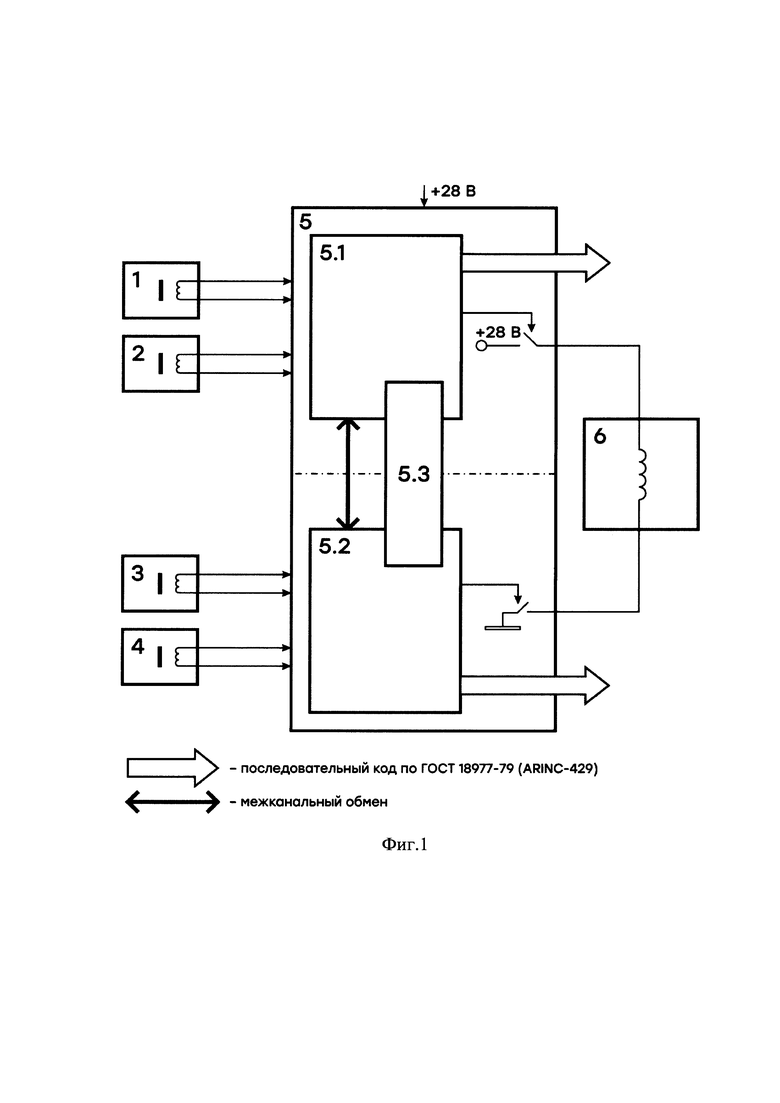
На фиг. 1 представлена схема устройства, реализующая заявляемый способ.
Устройство содержит первый датчик 1 частоты вращения ротора низкого давления nрнд, первый датчик 2 частоты вращения ротора высокого давления nрвд, второй датчик 3 частоты вращения ротора низкого давления nрнд, второй датчик 4 частоты вращения ротора высокого давления nрвд, автономный блок 5 защиты двигателя от раскрутки роторов, электромагнитный клапан 6 прекращения подачи топлива в двигатель.
В качестве датчиков 1,2,3,4 частоты вращения роторов двигателя могут быть использованы любые известные датчики частоты с приемлемой точностью, весом и габаритами, но предпочтительно применять бесприводной датчик частоты вращения магнитоиндукционного типа. Датчики 1 и 3 взаимодействуют с шестерней - индуктором, размещенной на валу ротора низкого давления двигателя. Датчики 2 и 4 взаимодействуют с шестерней - индуктором, кинематически связанной с ротором высокого давления. Таким образом, частота импульсов выходного напряжения от каждого датчика зависит от частоты вращения взаимодействующего с ним индуктора (соответствующего ротора двигателя). Датчики 1, 2, 3 и 4 между собой гальванически развязаны; отказ одного датчика не приводит к отказу других датчиков или выходу из строя устройств обработки сигнала соседних датчиков в блоке 5 (не показаны).
Автономный блок защиты 5 двигателя от раскрутки роторов представляет собой электронный цифровой блок для получения входной информации от датчиков частоты вращения nрнд и nрвд, и в случае заброса частот вращения роторов выше предельных значений осуществляет формирование управляющего сигнала на прекращение подачи топлива в ГТД путем включения электромагнитного клапана отсечки топлива 6.
Основное назначение блока 5 - это аварийная защита двигателя от раскрутки его роторов до возникновения нелокализованных фрагментов, обладающих высокой кинетической энергией. Специалистам в данной области ясно, что выполнение этой функции во многом обеспечивается оптимальной настройкой частот срабатывания аварийной защиты исходя из имеющихся запасов прочности деталей двигателя, однако это не является задачей настоящего изобретения.
Автономный блок 5 - специализированный вычислительный комплекс, работающий в реальном масштабе времени; для повышения надежности и исключения ложных срабатываний имеет двухканальную (двухпроцессорную) структуру и развитую систему постоянного контроля работоспособности блока, всех датчиков измерений частоты, электроклапана отсечки топлива и двигательной электропроводки.
Автономный блок защиты 5 содержит первый канал 5.1, второй канал 5.2, модуль встроенного контроля 5.3. Первый канал осуществляет коммутацию электрической цепи «+28 В», второй канал - коммутацию электрической цепи «0 В», таким образом, включение электромагнитного клапана 4 прекращения подачи топлива осуществляют по двухпроводной схеме, что повышает надежность системы аварийной защиты в целом.
Между каналами 5.1 и 5.2 имеется электрическая связь - межканальный обмен кодовой информации.
Модуль встроенного контроля 5.3 блока защиты двигателя осуществляет постоянный контроль входной информации от датчиков измерения частоты вращения ротора низкого давления nрнд и частоты вращения ротора высокого давления nрвд, контроль целостности электрических цепей датчиков измерения nрнд и nрвд на предмет отсутствия обрыва или короткого замыкания цепей датчиков, контроль вычислительной части каждого канала блока защиты, контроль межканального обмена между процессорами (вычислителями), контроль исправности электрической части канала управления электромагнитного клапана прекращения подачи топлива в двигатель. В случае выявления модулем отказа какого-либо из перечисленных выше элементов, соответствующий кодовый сигнал поступает в тот канал, где выявлена неисправность, при этом управляющий сигнал из блока 5 на отсечку топлива не поступает. Таким образом, какие-либо неисправности элементов системы надежно выявляются, а ложные срабатывания блока 5, вызванные этими сбоями, исключаются. Выявленные отказы в кодовом виде регистрируются бортовыми системами и в дальнейшем по прилету в аэропорт осуществляют их оперативное устранение. Таким образом, обеспечивается надлежащая готовность автономного блока для дальнейшей эксплуатации и исключения раскрутки роторов.
Передачу кодовой информации из каждого канала автономного блока в бортовые системы осуществляют в последовательном коде согласно ГОСТ 18977 или согласно его западному аналогу ARINC-429. Скорость передачи информации 100 кбит/с, формат кодового слова по ГОСТ 18977-79, РТМ 1495-75 с изменением 3.
Из представленной схемы видно, что к каждому каналу блока 5 подсоединен один (отдельный) датчик измерения nрнд и один (отдельный) датчик измерения nрвд, таким образом исключается влияние отказов одних датчиков на работу другого канала блока 5.
Электромагнитный клапан 6 прекращения подачи топлива в двигатель представляет собой типовую конструкцию малогабаритного соленоидного клапана отсечки. Формирование управляющего сигнала на клапан 6 осуществляется совместно двумя каналами блока 5.
Наличие межканального обмена позволяет обмениваться первому и второму каналам информацией, и за счет передачи каждым каналом кодовой информации во внешние системы обеспечить своевременную диагностику блока защиты двигателя и эффективные управляющие воздействия.
Устройство защиты двигателя от раскрутки ротора низкого давления (турбины вентилятора) или ротора высокого давления турбореактивного двухконтурного двигателя работает следующим образом.
В случае отказа исполнительного элемента топливорегулирующей аппаратуры возможно самопроизвольное увеличение расхода топлива GT в камеру сгорания турбореактивного двухконтурного двухвального двигателя. В результате увеличения расхода топлива неизбежна раскрутка ротора газогенератора (компрессора высокого давления) nрвд и соответствующая газодинамическая раскрутка ротора низкого давления (вентилятора) nрнд. В зависимости от условий полета и режима работы конкретного типа двигателя возможна как недопустимая раскрутка ротора низкого давления (вентилятора), при этом частота вращения ротора высокого давления может увеличиться, но находиться в пределах эксплуатационной нормы, так и наоборот - возможна недопустимая раскрутка ротора высокого давления, а параметр частоты вращения вентилятора некритичным.
Согласно сущности изобретения, когда в обоих каналах автономного блока будет идентифицирована раскрутка ротора низкого давления с одновременным увеличением частоты вращения ротора высокого давления или будет идентифицирована раскрутка ротора высокого низкого давления с одновременным увеличением частоты вращения ротора низкого давления, и при отсутствии отказов всех элементов аварийной защиты (блока, датчиков, электроклапана, линий связи), то в обоих вышеуказанных случаях произойдет срабатывание блока защиты двигателя и коммутация цепей «+28 В» и «0 В», как следствие включение электромагнитного клапана 6 отсечки и прекращение подачи топлива GT в двигатель. Одновременно с включением электромагнитного клапана 6 в выходном кодовом сообщении по ГОСТ 18977-79 и РТМ 1495-75 с изменением 3 из каждого канала 5 блока сформируется сообщение «Останов двигателя по раскрутке».
Возможна ситуация, когда в полете из-за аппаратного или программного сбоя в работе вычислителя любого из каналов автономного блока возможно ложное формирование признака раскрутки любого из роторов. Однако, срабатывания блока и ложного выключения двигателя в полете не произойдет, т.к. в соседнем канале блока раскрутка ротора двигателя не идентифицирована.
Возможен кратковременный отказ любого датчика частоты вращения или его электропроводки, приводящий к ложным показаниям частоты и свидетельствующих о забросе частоты вращения ротора; однако ложного срабатывания блока также не произойдет, т.к. отказ показаний частоты будет выявлен по допусковому или перекрестному контролю, или контролем целостности электрических цепей датчиков на предмет отсутствия обрыва или короткого замыкания цепей датчиков. Но в случае, если модуль встроенного контроля не выявит отказов измерений частоты вращения, ложного срабатывания блока все равно не произойдет, т.к. логика идентификации раскрутки роторов предусматривает увеличение частоты обоих роторов двигателя.
В конечном итоге, благодаря двухканальной структуре системы и заложенной логики идентификации раскрутки роторов, даже если произойдут сбои измерений частот вращений в рабочем диапазоне одновременно по трем датчикам частоты из четырех (в любых сочетаниях), ложного срабатывания блока и выключения двигателя в полете не произойдет.
Необходимо отметить, что после подтверждения идентификации (определения) раскрутки роторов во втором канале, переданном в первый канал через межканальный обмен; а также после подтверждения идентификации раскрутки роторов в первом канале, переданном во второй канал через межканальный обмен, электрические цепи «+28 В» и «0 В» блокируются в скоммутированном состоянии. Таким образом, после снижения оборотов двигателя ниже предельных значений срабатывания блока топливо в двигатель не поступает.
При этом при отсутствии подтверждения идентификации раскрутки роторов в одном из каналов блокировка коммутации электрической цепи не включается.
Указанный выше перечень контролируемых элементов системы защиты свидетельствует о высокой полноте и глубине контроля, что обеспечивает требуемую надежность автономного блока защиты двигателя и исключение его возможных ложных срабатываний.
Все выявленные в полете возможные отказы в кодовом виде по ГОСТ 18977-79 и РТМ 1495-75 с изменением 3 регистрируются бортовыми системами и в дальнейшем по прилету самолета в аэропорт осуществляют их оперативное устранение наземными службами эксплуатации.
Очевидно, что в особых ситуациях летчик должен иметь возможность снять блокировку автономного блока защиты и произвести попытку запуска двигателя. Однако разработка такой технологии не является целью настоящего изобретения. Тем не менее, следует принять во внимание известное решение по инициализации системы (FR 2960906 (А1) - 2011-12-09).
Предложенный способ аварийной защиты от раскрутки роторов ГТД был проверен натурными испытаниями в составе турбореактивного двухконтурного двухвального двигателя ПД-14 разработки АО «ОДК-Авиадвигатель», РФ. Результаты испытаний ПД-14 совместно с блоком аварийной защиты типа БЗД-14 полностью подтвердили эффективность выбранных технических решений.
Установлено, что в качестве датчиков частоты вращения роторов двигателя ПД-14 предпочтительно использовать бесприводные датчики магнитоиндукционные типа ДЧВ-16М (аналог известных магнитоиндукционных датчиков ДЧВ-2500А, ДТА-10Е). Также установили, что для датчика ДЧВ-16М предпочтительно иметь следующий диапазон допускового контроля, выход за который квалифицируется как отказ датчика - для канала ротора низкого давления 700…6000 об/мин; для канала ротора высокого давления 700…20000 об/мин. Величина перекрестного контроля (максимально допустимая разница оборотов между каналами блока) составляет 160 об/мин для канала измерения частоты вращения ротора низкого давления и 240 об/мин для канала измерения частоты вращения ротора высокого давления.
Таким образом, предлагаемое изобретение с вышеуказанными отличительными признаками, в совокупности с известными признаками, повышает функциональную надежность аварийной защиты турбореактивного двухконтурного двухвального двигателя от раскрутки его роторов, усиливает контроль за работой автономного блока защиты, исключая возможность его ложных срабатываний.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ АВАРИЙНОЙ ЗАЩИТЫ ТУРБОРЕАКТИВНОГО ДВУХКОНТУРНОГО ДВУХВАЛЬНОГО ДВИГАТЕЛЯ ОТ РАСКРУТКИ ЕГО РОТОРОВ | 2023 |
|
RU2810866C1 |
| СПОСОБ ЗАЩИТЫ ГАЗОТУРБИННОГО ДВИГАТЕЛЯ ОТ ПОМПАЖА КОМПРЕССОРА ЭЛЕКТРОННОЙ ДВУХКАНАЛЬНОЙ СИСТЕМОЙ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ | 2023 |
|
RU2810867C1 |
| СПОСОБ ЗАЩИТЫ ГАЗОТУРБИННОГО ДВИГАТЕЛЯ ОТ РАСКРУТКИ РОТОРОВ ПРИ ПОЖАРЕ | 2023 |
|
RU2825767C1 |
| СПОСОБ ЗАЩИТЫ ДВУХКОНТУРНОГО ТУРБОРЕАКТИВНОГО ДВИГАТЕЛЯ ОТ РАСКРУТКИ ТУРБИНЫ НИЗКОГО ДАВЛЕНИЯ | 2015 |
|
RU2602644C1 |
| СПОСОБ ЗАЩИТЫ ГАЗОТУРБИННОГО ДВИГАТЕЛЯ | 2008 |
|
RU2376487C2 |
| СПОСОБ УПРАВЛЕНИЯ ГАЗОТУРБИННЫМ ДВИГАТЕЛЕМ НА ПРЕРВАННОМ ВЗЛЕТЕ САМОЛЕТА | 2024 |
|
RU2837365C1 |
| Способ автоматического управления силовой установкой самолета при снижении тяги одного из двигателей на взлетном режиме | 2023 |
|
RU2813647C1 |
| СПОСОБ ДИАГНОСТИКИ И ПАРИРОВАНИЯ ОТКАЗОВ ДАТЧИКОВ РЕГУЛИРУЕМЫХ ПАРАМЕТРОВ ДВУХКАНАЛЬНОЙ ЭЛЕКТРОННОЙ СИСТЕМЫ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ ГАЗОТУРБИННОГО ДВИГАТЕЛЯ | 2023 |
|
RU2817573C1 |
| СПОСОБ ЗАЩИТЫ ГАЗОТУРБИННОГО ДВИГАТЕЛЯ ОТ МНОГОКРАТНЫХ ПОМПАЖЕЙ КОМПРЕССОРА | 2017 |
|
RU2670469C1 |
| Автономное интегрированное устройство сбора, регистрации и контроля параметров авиационного газотурбинного двигателя | 2019 |
|
RU2719757C1 |
Изобретение относится к области газотурбинного двигателестроения и может быть использовано в системах аварийной защиты авиационных двухконтурных двухвальных двигателей, в силовых газотурбинных установках для морских и речных судов, газотурбинных электростанций, газотурбинных нагнетателей магистральных газопроводов и т.д. В процессе эксплуатации газотурбинных двигателей иногда наблюдаются случаи забросов частоты вращения роторов. Причинами таких забросов являются нелокализованные отказы исполнительных механизмов дозирования топлива, приводящие к самопроизвольному увеличению расхода топлива в камеру сгорания, которые система автоматического управления двигателем сама парировать не может. Самопроизвольное увеличение расхода топлива может носить настолько значимый и мгновенный характер, что экипаж не располагает временем на анализ показаний мониторов, и поэтому не может оперативно повлиять на ситуацию. К опасным последствиям относится механическая поломка вращающихся деталей двигателя и вылет за пределы корпуса нелокализованных фрагментов ротора с высокой кинетической энергией. Для обеспечения безопасности полетов и безаварийной работы турбомашин востребовано применение автономных блоков защиты двигателя от раскрутки его роторов. Актуально, чтобы автономные блоки защиты имели высокую надежность и не допускали случаев ложных срабатываний, поскольку это зачастую связано с выключением двигателя в полете. Технической задачей изобретения является повышение функциональной надежности аварийной защиты турбореактивного двухконтурного двухвального двигателя от раскрутки его роторов, повышение полноты и глубины контроля работы автономного блока защиты, исключение его возможных ложных срабатываний. 7 з.п. ф-лы, 1 ил.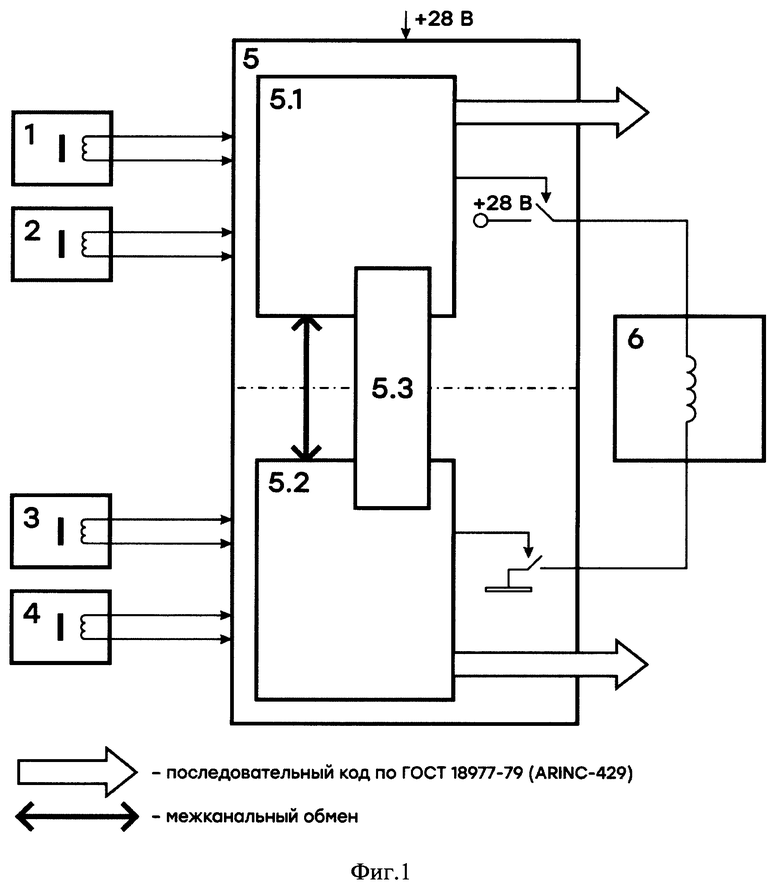
1. Способ защиты газотурбинного двигателя от раскрутки его роторов с помощью автономного блока защиты, заключающийся в том, что измеряют частоту вращения роторов двигателя, сравнивают измеренные значения частоты вращения роторов с заранее установленными предельными значениями, и если измеренные значения частот вращения роторов превышают заранее установленные предельные значения, то с помощью автономного блока защиты формируют управляющий сигнал на электромагнитный клапан прекращения подачи топлива в двигатель, отличающийся тем, что в составе автономного блока защиты предусматривают два независимых канала управления (первый и второй каналы), электрически соединенных между собой через межканальный обмен кодовой информации, при этом в каждом канале управления осуществляют независимое измерение частоты вращения ротора низкого давления nрнд и частоты вращения ротора высокого давления nрвд турбореактивного двухконтурного двухвального двигателя, сравнение измеренного значения частоты nрнд с заранее установленными предельными значениями nрндпред1 и nрндпред2, сравнение измеренного значения частоты nрвд с заранее установленными предельными значениями nрвдпред1 и nрвдпред2, кроме того, в автономный блок защиты дополнительно вводят модуль встроенного контроля, с помощью которого осуществляют постоянный контроль работоспособности каждого канала блока защиты, контроль работоспособности всех датчиков частоты вращения nрнд и nрвд, контроль исправности электромагнитного клапана прекращения подачи топлива в двигатель и при одновременном превышении частот вращений роторов nрнд≥nрндпред1 и nрвд≥nрвдпред1 или при одновременном превышении частот вращений роторов nрвд≥nрвдпред2 и nрвд≥nрвдпред2 в каждом канале автономного блока и отсутствии выявленных отказов модулем встроенного контроля осуществляют включение электромагнитного клапана прекращения подачи топлива в двигатель, формирование и передачу кодового сигнала «Останов двигателя по раскрутке» из каждого канала автономного блока.
2. Способ защиты газотурбинного двигателя от раскрутки его роторов по п. 1, отличающийся тем, что включение электромагнитного клапана прекращения подачи топлива в двигатель осуществляют по двухпроводной схеме путем коммутации в автономном блоке электрических цепей «+28 В» и «0 В» соответственно первым и вторым каналом автономного блока.
3. Способ защиты газотурбинного двигателя от раскрутки его роторов по п. 2, отличающийся тем, что коммутацию электрической цепи «+28 В» в первом канале автономного блока защиты и коммутацию электрической цепи «0 В» во втором канале автономного блока защиты осуществляют в каждом из каналов независимо от соседнего канала.
4. Способ защиты газотурбинного двигателя от раскрутки его роторов по п. 1, отличающийся тем, что после подтверждения идентификации (определения) раскрутки роторов во втором канале, переданном в первый канал через межканальный обмен, а также после подтверждения идентификации раскрутки роторов в первом канале, переданном во второй канал через межканальный обмен, электрические цепи «+28 В» и «0 В» блокируются в скоммутированном состоянии; при этом при отсутствии подтверждения идентификации раскрутки роторов в одном из каналов блокировка коммутации электрической цепи не включается.
5. Способ защиты газотурбинного двигателя от раскрутки его роторов по п. 1, отличающийся тем, что в модуле встроенного контроля блока защиты двигателя осуществляют постоянный контроль входной информации от всех датчиков измерения частоты вращения ротора низкого давления nрнд и всех датчиков измерения частоты вращения ротора высокого давления nрвд, контроль целостности электрических цепей всех датчиков измерения nрнд и nрвд, контроль вычислительной части каждого канала блока защиты, контроль межканального обмена, контроль исправности электрической части канала управления электромагнитного клапана прекращения подачи топлива в двигатель; формирование и выдачу соответствующего кодового сигнала отказа в канал блока защиты, где был выявлен отказ, также выдачу этого соответствующего кодового сигнала отказа в бортовую систему регистрации параметров двигателя.
6. Способ защиты газотурбинного двигателя от раскрутки его роторов по п. 1, отличающийся тем, что в качестве датчиков частоты вращения роторов низкого и высокого давления используют бесприводные магнитоиндукционные датчики.
7. Способ защиты газотурбинного двигателя от раскрутки его роторов по п. 6, отличающийся тем, что в качестве бесприводных магнитоиндукционных датчиков используют датчики типа ДЧВ-16М.
8. Способ защиты газотурбинного двигателя от раскрутки его роторов по п. 5, отличающийся тем, что постоянный контроль информации от датчиков измерения частоты вращения ротора низкого давления nрнд и датчиков измерения частоты вращения ротора высокого давления nрвд предусматривает постоянный допусковый контроль работы каждого датчика измерения nрнд, nрвд и постоянный перекрестный контроль результатов измерений параметров nрнд, nрвд между различными каналами автономного блока защиты двигателя.
| АВТОНОМНЫЙ БЛОК ЗАЩИТЫ ДВИГАТЕЛЯ ГАЗОТУРБИННОЙ УСТАНОВКИ И СПОСОБ ЕГО РАБОТЫ | 2022 |
|
RU2776229C1 |
| Способ управления двухвальным газотурбинным двигателем с регулируемыми направляющими аппаратами компрессоров высокого и низкого давления | 2021 |
|
RU2778417C1 |
| US 20210332765 A1, 28.10.2021. | |||

