Заявляемые объекты объединены единым изобретательским замыслом, относятся к радиотехнике, в частности к способам распознавания радиосигналов (PC) и могут быть использованы в технических средствах распознавания вида и параметров модуляции PC, а также в средствах радиоконтроля для определения класса априорно неизвестного сигнала.
Известен способ распознавания типа манипуляции радиосигналов по Пат. РФ №2551903, МПК Н04В 1/06 от 18.04.2014 г. В известном аналоге предварительно задают эталонные PC равной длительности, которые дискретизируют и квантуют, выполняют операцию фреймового вейвлет-преобразования (ФВП). Формируют матрицу распределения энергии (МРЭ) для последовательности квантованных отсчетов каждого эталонного PC. Для каждого PC формируют вектор признаков (ВП) путем построчной конкатенации вейвлет-коэффициентов (ВК) полученных МРЭ, после чего ВК ВП нормируют. Принимают распознаваемый PC и формируют его ВП аналогично ВП эталонных PC, после чего идентифицируют распознаваемый PC путем сравнения его ВП с ВП каждого из эталонных PC. Причем ВП формируют путем построчной конкатенации ВК полученных МРЭ начиная со второй строки. Распознаваемый PC считают инцидентным эталонному PC, модуль разности параметров ВП с которым будет минимальным.
Недостатком известного способа является необходимость хранить ВП каждого из эталонных PC, что приводит к линейной зависимости между количеством эталонных сигналов и размером памяти, необходимой классификатору для работы, что в свою очередь существенно ограничивает возможное разнообразие эталонных сигналов. Отсутствие разнообразия эталонных сигналов сужает охватываемый класс распознаваемых радиосигналов. Кроме того, увеличение количества эталонных ВП влечет за собой снижение быстродействия способа.
Наиболее близким по технической сущности к заявленному является «Способ автоматического распознавания типов манипуляции радиосигналов» по Пат. РФ №2510077, МПК G06N 3/02, H04L 27/32 от 20.04.2012 г. В способе-прототипе принятый аналоговый PC дискретизируют по времени и квантуют, формируют синфазную и квадратурную составляющие оцифрованных отсчетов сигнала, по значениям синфазной и квадратурной составляющих n отсчетов сигнала рассчитывают кумулянты CIIII, CII, CIIQQ значения которых подаются на нейронную сеть типа многослойный персептрон* (* многослойный перцептрон - частный случай перцептрона Розенблатта, в котором один алгоритм обратного распространения ошибки обучает все слои (см. http://ru.wikipedia.org/wiki/многослойный перцептрон Румельхарта)), которая предварительно обучена методом обратного распространения ошибки по значениям кумулянтов CIIII, CII, CIIQQ сигналов обучающей выборки, с помощью нейронной сети в автоматическом режиме распознают сигналы с амплитудной (АМн), амплитудно-фазовой (КАМ), фазовой (ФМн) и частотной (ЧМн) манипуляциями.
Недостатком способа-прототипа является относительно низкая вероятность правильного распознавания PC: заявленный процент ошибки может достигать значения в 20% при отношении сигнал/шум (OCШ) 12 дБ и более. В условиях реального применения, достигнуть такого значения ОСШ не всегда удается, что дополнительно затрудняет использование способа.
Наиболее близким по технической сущности к предлагаемому устройству является устройство автоматического распознавания типов манипуляции радиосигналов по Пат. РФ №2510077, МПК G06N 3/02, H04L 27/32 от 20.04.2012 г. Устройство-прототип содержит последовательно соединенные антенну, аналого-цифровой преобразователь (АЦП), обеспечивающий дискретизацию по времени и квантование радиосигнала, блок расчета сигнала (БРС), обеспечивающий формирование синфазной и квадратурной составляющей сигнала, блок расчета признаков (БРП), обеспечивающий расчет по значениям синфазной и квадратурной составляющих n-отсчетов сигнала кумулянтов, блок нейронной сети (БНС), обеспечивающий определение типа манипуляции сигнала, состоящего из i-ячеек входного слоя, j-ячеек промежуточного слоя, k-ячеек выходного слоя, причем каждая ячейка предыдущего слоя соединена весовой связью с каждой ячейкой последующего, а каждая ячейка БНС состоит из последовательно соединенных сумматора и нелинейного преобразователя, выход каждой ячейки выходного слоя является индикатором типа манипуляции и соединен с логическим устройством МАХ, обеспечивающим сравнение значений сигналов ячеек выходного слоя и выдачу на выход БНС опознавательного сигнала, соответствующего найденному типу манипуляции.
Недостатком устройства-прототипа является низкая вероятность правильно распознавания типа манипуляции радиосигналов, что затрудняет его применение в реальных условиях анализа характеристик априорно неизвестного PC.
Целью заявляемых способа и устройства автоматического распознавания типа манипуляции радиосигналов, является повышение вероятности правильного распознавания анализируемых PC за счет расширения вектора его признаков, дополнительной нормализации амплитуды входного сигнала и вектора значений функции активации нейронов выходного слоя.
Поставленная цель достигается тем, что в известном способе автоматического распознавания типов манипуляции радиосигналов, включающем дискретизацию принятого аналогового радиосигнала по времени и квантование, формирование синфазной I и квадратурной Q составляющих оцифрованных отсчетов сигнала, расчет кумулянтов CIIII, CII, CIIQQ по значениям синфазной и квадратурной составляющих N-отсчетов сигнала, подачу их значений на входы предварительно обученной методом обратного распространения ошибки по значениям кумулянтов CIIII, CII, CIIQQ сигналов обучающей выборки нейронную сеть типа многослойный персептрон, распознающую в автоматическом режиме радиосигналы, дополнительно нормируют к единице среднее значение амплитуды сигнала, расширяют векторы признаков эталонных сигналов  , применяемых при обучении нейронной сети и вектор признаков распознаваемого сигнала VS путем вычисления кумулянтов второго CIQ, CQQ, третьего CIII, CIIQ, CIQQ, CQQQ и четвертого CIIIQ, CIQQQ, CQQQQ порядков, который подают на вход нейронной сети, а значения функции активации нейронов выходного слоя нормируют к единичной сумме.
, применяемых при обучении нейронной сети и вектор признаков распознаваемого сигнала VS путем вычисления кумулянтов второго CIQ, CQQ, третьего CIII, CIIQ, CIQQ, CQQQ и четвертого CIIIQ, CIQQQ, CQQQQ порядков, который подают на вход нейронной сети, а значения функции активации нейронов выходного слоя нормируют к единичной сумме.
Благодаря новой совокупности существенных признаков в заявленном способе за счет расширения вектора признаков классифицируемого PC и выполнения операции нормировки обеспечивается повышение вероятности правильного распознавания типа манипуляции PC.
В заявляемом устройстве автоматического распознавания типа манипуляции радиосигналов поставленная цель достигается тем, что в известном устройстве, состоящем из последовательно соединенных антенны, аналого-цифрового преобразователя, обеспечивающего дискретизацию по времени и квантование радиосигнала, и блока расчета сигнала, обеспечивающего формирование синфазной и квадратурной составляющих n отсчетов сигнала, последовательно соединенных блока расчета признаков CIIII, CII, CIIQQ и блока нейронной сети типа многослойный персептрон, состоящего из K-ячеек входного слоя, H-ячеек скрытого слоя и E-ячеек выходного слоя, причем каждая ячейка предыдущего слоя соединена весовой связью с каждой ячейкой последующего, а каждая ячейка блока нейронной сети состоит из последовательно соединенных сумматора и нелинейного преобразователя, дополнительно введены блок нормализации амплитуды, предназначенный для нормирования к единице среднего значения амплитуды сигнала, группа информационных входов которого соединена с группой информационных выходов блока расчета сигнала, а группа информационных выходов соединена с группой информационных входов блока расчета признаков, последовательно соединенные блок принятия решения, предназначенный для нормирования к единичной сумме функций активации нейронов выходного слоя, сравнения максимального значения из нормализованных функций активации нейронов выходного слоя с порогом, задания соответствия между номером нейрона выходного слоя и кодовой комбинации, определяющей тип манипуляции радиосигнала, и блок индикации, причем первая группа информационных входов блока принятия решения соединена с группой информационных выходов блока нейронной сети, а вторая группа информационных входов является второй входной шиной устройства автоматического распознавания типа манипуляции радиосигналов, предназначена для задания порогового уровня, а группа входов управления аналого-цифрового преобразователя является первой входной шиной устройства автоматического распознавания типа манипуляции радиосигналов и предназначена для задания частоты дискретизации FS, полосы частот оцифровываемого сигнала ΔF и длительности ΔT, а блок расчета признаков предназначен для дополнительного определения кумулянтов второго CIQ, CQQ, третьего CIII, CIIQ, CIQQ, CQQQ и четвертого CIIIQ, CIQQQ, CQQQQ порядков.
Перечисленная новая совокупность существенных признаков за счет введения новых элементов и связей позволяет достичь цели изобретения: повысить вероятность правильного распознавания анализируемых радиосигналов.
Заявленные способ и устройство поясняются чертежами, на которых:
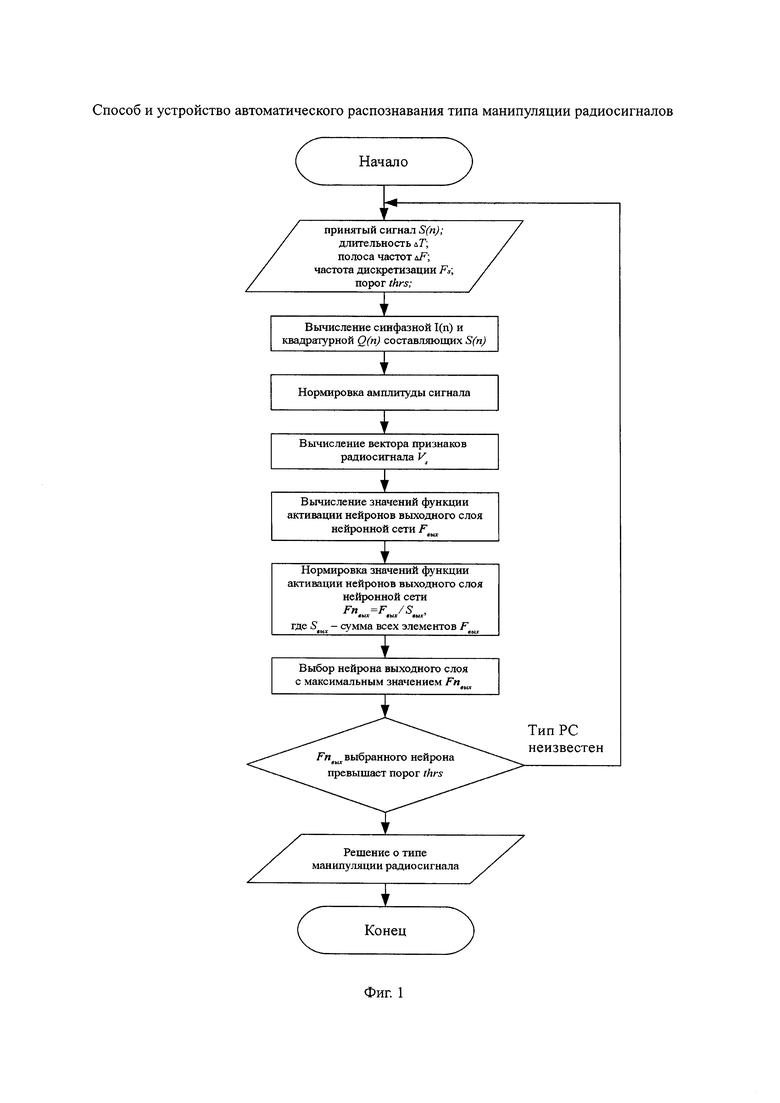
на фиг. 1 показан обобщенный алгоритм распознавания типа манипуляции PC;
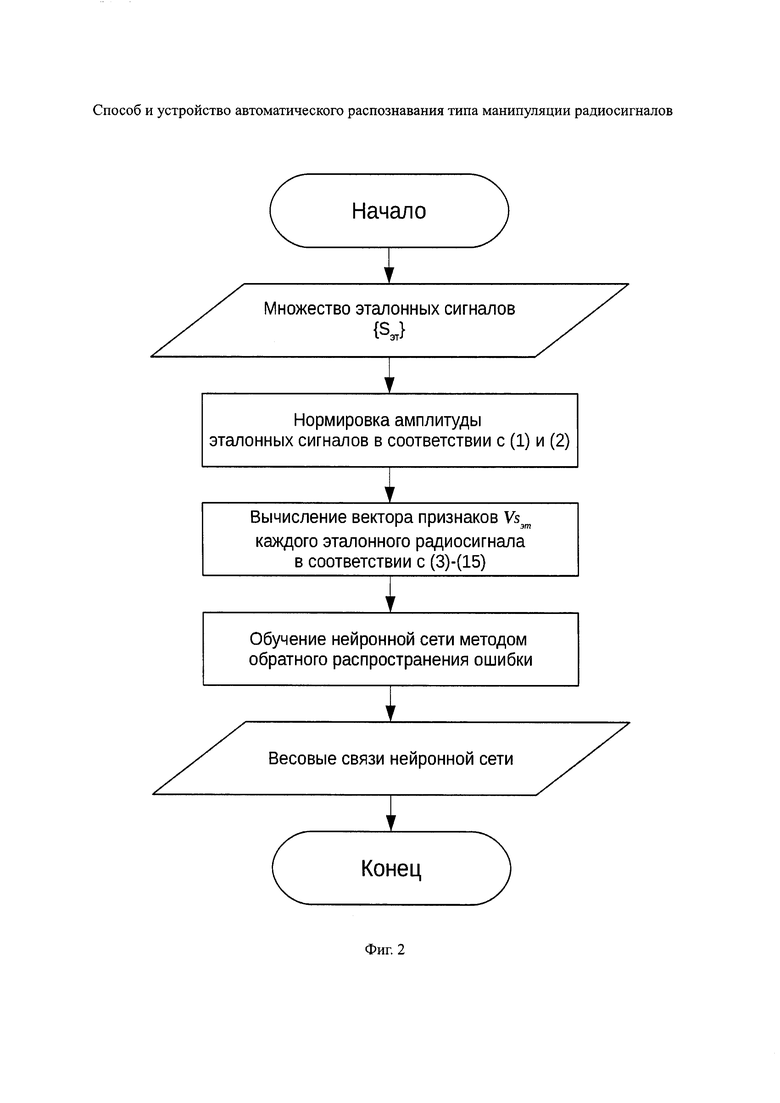
на фиг. 2 иллюстрируется алгоритм обучения нейронной сети;
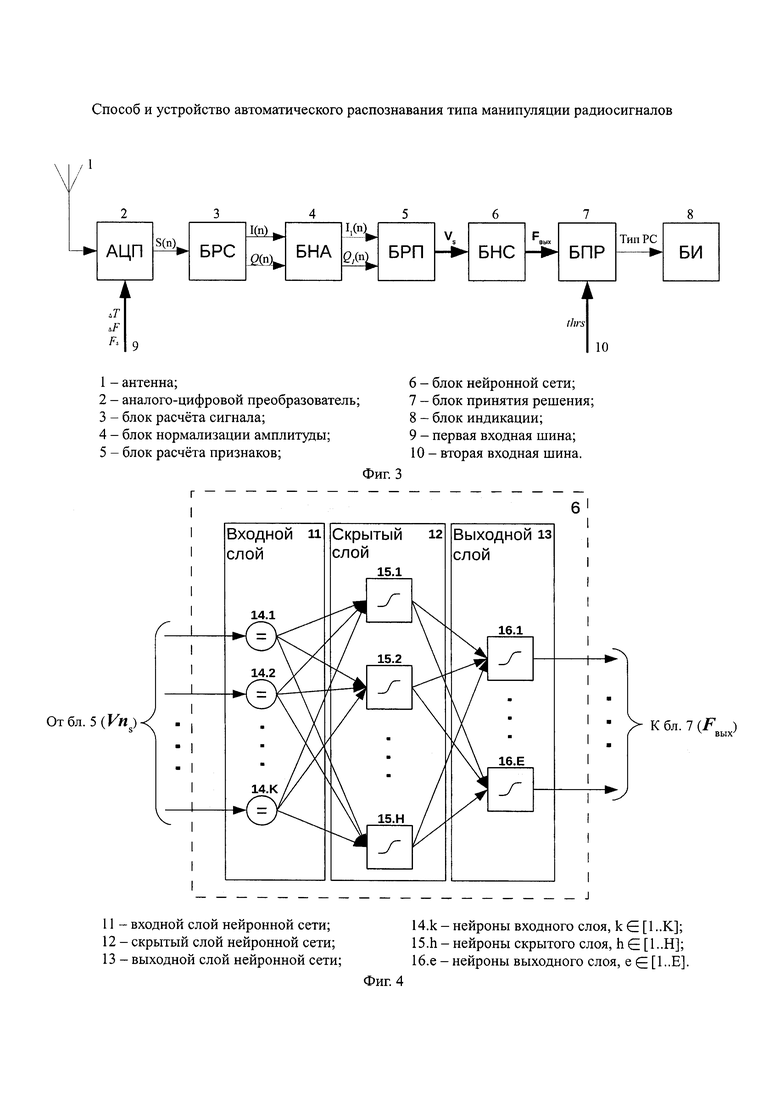
на фиг. 3 представлена обобщенная структурная схема устройства распознавания типа манипуляции PC;
на фиг. 4 показана структурная схема нейронной сети;
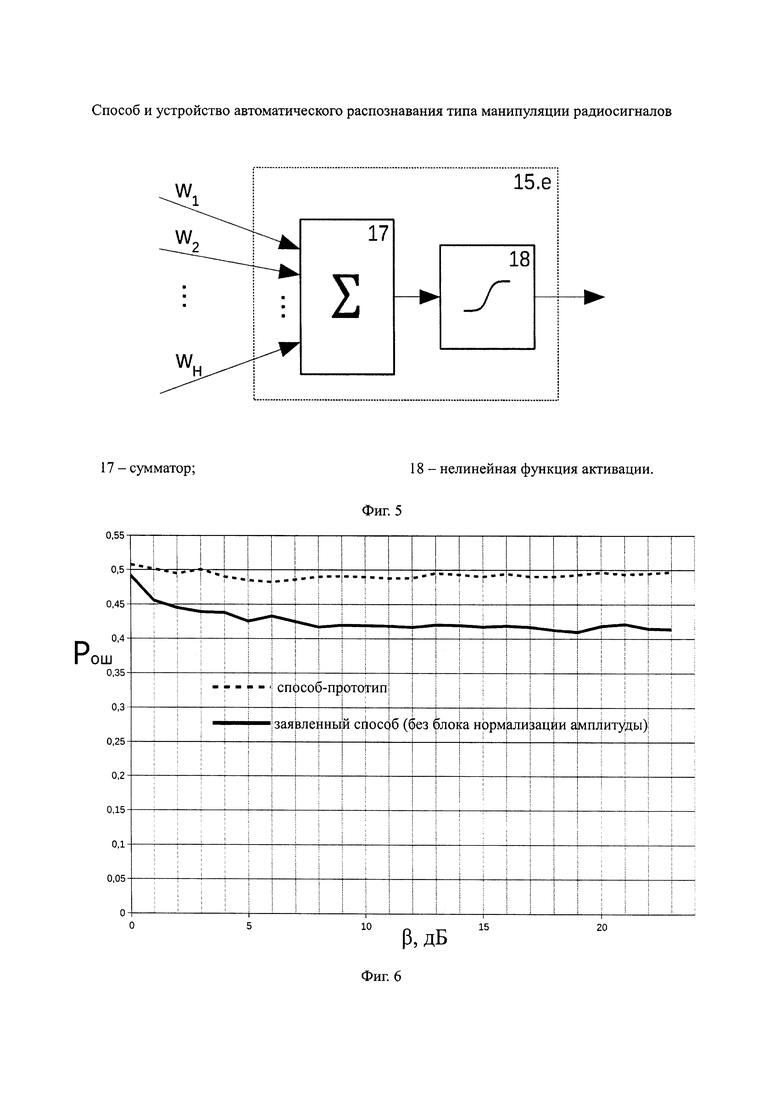
на фиг. 5 приведена схема одного нейрона с нелинейной функцией активации;
на фиг. 6 показана зависимость ошибочного распознавания типа манипуляции PC от отношения сигнал/шум для способа-прототипа и заявленного способа без применения нормализации сигнала по амплитуде;
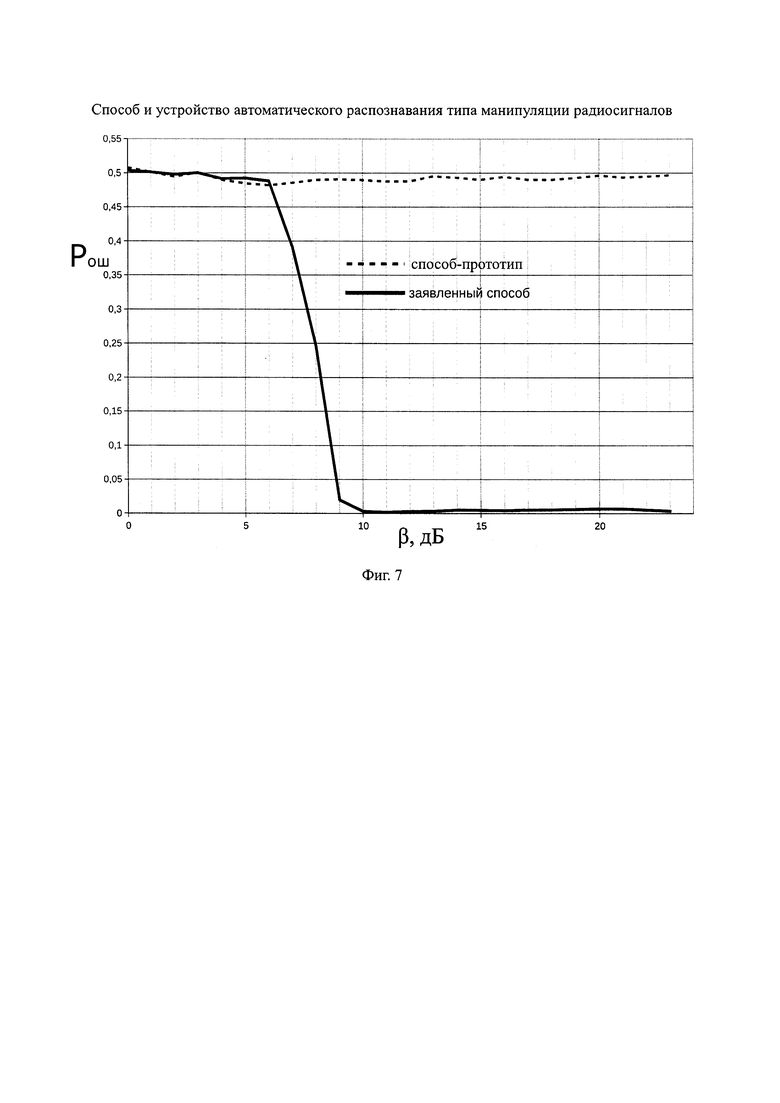
на фиг. 7 приведена зависимость ошибки распознавания типа манипуляции PC от отношения сигнал/шум для способа-прототипа и заявленного способа с применением нормализации сигнала по амплитуде.
Реализация заявленного способа объясняется следующим образом. На подготовительном этапе (см. фиг. 2) в цифровом виде задают по L эталонных PC равной длительности для всех типов манипуляции, которые подлежат распознаванию (обучающее множество). Количество комплексных временных отсчетов N сигнала выбирается в зависимости от требований по достоверности распознавания и минимальной гарантированной продолжительности PC. Для удобства последующих вычислений, количество отсчетов PC берут вида N=2w, где w - натуральное число в диапазоне от 9 до 16, рекомендуемое значение 12.
Нормируют к единице среднее значение амплитуды всех сигналов обучающего множества по формулам:


где  .
.
Далее для всех PC обучающего множества вычисляют кумулянты второго порядка CI,I, CI,Q, CQ,Q по формулам:



Вычисляют кумулянты третьего порядка CI,I,I, CI,I,Q, CI,Q,Q, CQ,Q,Q по формулам:




Вычисляют кумулянты четвертого порядка CI,I,I,I, CI,I,I,Q, CI,I,Q,Q, CI,Q,Q,Q, CQ,Q,Q,Q по формулам:





Более подробно порядок вывода кумулянтов различных порядков и обоснование их применения даны в Приложении.
Для каждого эталонного PC Sэт(n) формируется ВП, состоящий из набора 12 вещественных чисел вычисленных раньше:

Инициализируют веса на ребрах нейронной сети (см. фиг. 4) типа многослойный персептрон с полными связями между слоями, содержащей входной слой, один скрытый слой нейронов с сигмоидальной функцией активации и выходной слой нейронов с сигмоидальной функцией активации (см фиг. 5), случайными числами из диапазона от 0 до 1.
Производят обучение полученной на предыдущем шаге нейронной сети методом обратного распространения ошибки по нормированным значениям векторов признаков  . Для оценки качества обучения используется метод кросс-валидации (скользящий контроль).
. Для оценки качества обучения используется метод кросс-валидации (скользящий контроль).
Более детально алгоритм обучения нейронных сетей описан в книге Ф. Уоссермена «Нейрокомпьютерная техника: теория и практика», издательство «Мир», 1992 год.
Последним действием подготовительного этапа является сохранение весовых связей нейронной сети в долговременной памяти.
На этапе распознавания типа манипуляции PC (см. фиг. 1) для распознаваемого сигнала S(t), принятого с частотой дискретизации Fs в полосе частот ΔF, имеющего продолжительность ΔT=N/Fs, формируют его ВП VS аналогично выше рассмотренным значениям для различных PC. С этой целью принятый PC дискретизируют и квантуют, формируют синфазную I и квадратурную Q составляющие, нормируют к единице среднее значение амплитуды сигнала в соответствии с (1) и (2), последовательно вычисляют кумулянты второго (CI,I, CI,Q, CQ,Q), третьего (CI,I,I, CI,I,Q, CI,Q,Q, CQ,Q,Q) и четвертого (CI,I,I,I, CI,I,I,Q, CI,I,Q,Q, CI,Q,Q,Q, CQQQQ) порядков в соответствии с (3)-(14).
Сформированный ВП VS сигнала S(n) подают на входной слой нейронной сети. Далее поочередно для скрытого и выходного слоев нейронной сети в каждом нейроне вычисляется значение функции активации на основе входных значений xj и коэффициентов весовых связей wj данного нейрона по формуле

где LC - линейная комбинация входных значений, определяемая выражением

где K - количество входных связей нейрона. Значения функций активации нейрона Fact передается на синоптические связи следующего слоя в качестве соответствующих xi.
Значение функции активации нейронов выходного слоя образуют вектор Fвых, который нормируется к единичной сумме своих элементов в соответствии с выражением

где Sвых=sum(Fвых). После этого определяется нейрон, которому соответствует максимальное значение элемента Fnвых.
В связи с тем, что каждый нейрон выходного слоя соответствует определенному типу манипуляции, его выбор и определяет искомую величину. Если MAX(Fnвых) превышает пороговое значение  , то в качестве решения принимается окончательное решение о типе манипуляции PC, в противном случае считают, что тип манипуляции PC неизвестен, требуется повторная запись сигнала и его анализ.
, то в качестве решения принимается окончательное решение о типе манипуляции PC, в противном случае считают, что тип манипуляции PC неизвестен, требуется повторная запись сигнала и его анализ.
Выполнен анализ характеристик предлагаемых технических решений методом численного моделирования. В качестве распознаваемых типов PC были приняты:
сигналы с двух и четырех позиционной амплитудной манипуляциями как представители класса сигналов с амплитудной манипуляцией (АМн);
сигналы с шестнадцати и шестидесяти четырех позиционной квадратурно-амплитудной манипуляциями как представители класса сигналов с квадратурно-амплитудной манипуляцией (КАМ);
сигналы с восьми позиционной фазовой и четырех позиционной дифференциальной манипуляциями как представители класса сигналов с фазовой манипуляцией (ФМн);
сигналы с двух и четырех позиционной частотной манипуляциями как представители класса сигналов с частотной манипуляцией (ЧМн).
Обучающее множество состояло из 32000 сигналов: по L=8000 в каждом классе сигналов, длина каждого сигнала составляла N=4096 отсчета, частота дискретизации Fs в 4 раза превышала полезную полосу сигналов. В целях обеспечения разнообразия набора векторов признаков и увеличения обобщающей способности классификатора, каждый из сигналов S модифицировался в соответствии с выражением:

где α - случайное число из диапазона от 0 до 42, AWGNS,β - аддитивный белый гауссовский шум с энергией на β дБ меньше, чем у сигнала S, β - случайное число из диапазона от 0 до 24.
Такой способ модификации сигнала отражает не только изменчивость отношения сигнал / шум в диапазоне 24 дБ, но и изменение абсолютного уровня сигнала в диапазоне 42 дБ, что часто встречается в условиях сложной электромагнитной обстановки.
На сигналах описанного выше множества было обучено два классификатора: с признаками способа-прототипа и предлагаемого способа, без нормализации амплитуды сигнала (блок 4). Сравнение результатов работы классификаторов представлено на фиг. 6. Ось абсцисс - отношение сигнал/шум β, выраженное в дБ. Ось ординат - вероятность ошибки распознавания Рош типа манипуляции PC от 0 до 1. В качестве тестового множества выступал набор сигналов, полученный методом, аналогичным описанному выше. Из результатов тестирования видно, что предлагаемое изменение набора признаков ведет к уменьшению вероятности ошибки Рош примерно на 0.08. Однако полученное улучшение качества распознавания недостаточно для практического применения.
На фиг. 7 представлено сравнение по описанной выше методике классификатора, обученного по способу-прототипу и предлагаемому способу, включая нормализацию амплитуды сигнала. Видно, что введение блока нормализации амплитуды значительно уменьшает вероятность ошибки распознавания Рош типа манипуляции PC при отношении сигнал/шум свыше 6 дБ.
Из проведенного анализа следует, что заявленный способ автоматического распознавания типа манипуляции радиосигналов позволяет определять тип PC с вероятностью ошибки не более 0.03 при отношении сигнал/шум больше 9 дБ, что существенно превосходит параметры прототипа.
Заявляемое устройство (см. фиг. 3) содержит последовательно соединенные антенну 1, аналого-цифровой преобразователь 2, блок расчета сигнала 3, блок нормализации амплитуды 4, блок расчета признаков 5, блок нейронной сети 6, блок принятия решения 7 и блок индикации 8. Группа входов управления аналого-цифрового преобразователя 2 является первой входной шиной 9 устройства автоматического распознавания типа манипуляции радиосигналов. Вторая группа информационных входов блока принятия решения 7 является второй входной шиной 10 устройства автоматического распознавания типа манипуляции радиосигналов.
Работа устройства осуществляется следующим образом. На подготовительном этапе определяют круг сигналов, подлежащих распознаванию {Sэт}. Эти сигналы по L реализаций равной длительности последовательно подают на вход устройства (обучающее множество). Названные сигналы с выхода антенны 1 поступают на группу информационных входов аналого-цифрового преобразователя 2. По группе управляющих входов (шина 9) задают параметры работы блока 2 (ΔТ, ΔF, FS). В функции блока 2 входит дискретизация аналогового радиосигнала длительностью ΔТ в полосе частот ΔF по времени и квантование по уровню с частотой дискретизации FS. Оцифрованный сигнал S(n) передается с выхода блока 2 на информационный вход блока расчета сигнала 3. Данный блок рассчитывает по дискретным значениям сигнала Sэт(n) его синфазную I и квадратурную Q составляющие, которые с выходов блока 3 передаются на информационные входы блока нормализации амплитуды 4. Квадратурные составляющие сигнала нормируют в соответствии с (1), (2), а полученные значения I1 и Q1 с выходов блока 4 поступают на информационные входы блока 5. Основной задачей блока расчета признаков 5 является формирование вектора признаков сигнала в соответствии с выражениями (3)-(15). Полученные элементы ВП параллельно поступают на информационные входы блока нейронной сети 6. Данные, поступающие на информационные входы блока 6, воздействуют на информационные входы K нейронов 14.1-14.K входного слоя 11 (см. фиг. 4). В обязанность каждого нейрона входного слоя 11 входит функция разветвления информации на Н выходов. Данные с выходов блоков 14.1-14.K передаются на соответствующие информационные входы нейронов скрытого слоя 15.1-15.Н (см. фиг. 4). Для этого каждый из k, k=1, 2, …, K, нейронов 14.k входного слоя 11 имеет Н информационных выходов, каждый из которых соединен с информационным входом соответствующего нейрона 15.h скрытого слоя 12. Каждый из блоков 15.1-15.H (см. фиг. 5) вычисляет линейную комбинацию данных на входах сумматора 17.h в соответствии с (17). Последние с выхода сумматора 17.h поступают на вход нелинейного преобразователя 18.h. Функцией нелинейного преобразователя является вычисление функции активации нейрона 15.h в соответствии с (16). Выход преобразователя 18.h является выходом нейрона 15.h с нелинейной функцией активации. Далее по аналогии с входным слоем 11 данные с нейронов скрытого слоя 12 передаются на информационные входы нейронов 16.1-16.E выходного слоя 13. При этом каждый из h, h=1, 2, …, Н, нейронов 15.h скрытого слоя 12 имеет Е информационных выходов, каждый из которых соединен с информационным входом соответствующего нейрона 16.е выходного слоя 13. Следует отметить, что реализация нейронов скрытого 12 и выходного 13 слоев идентична (см. фиг. 5). Значения функций активации нейронов выходного слоя 13 вычисляют аналогично функциям активации нейронов скрытого слоя 12. В результате на выходе каждого нейрона 16.1-16.Е выходного слоя 13 формируют значения, которые образуют вектор результатов работы блока нейронной сети 6.
По выходным значениям блока нейронной сети 6 и априорно известной информации о типа манипуляции сигнала обучающего множества обновляют весовые коэффициенты связей wij блока нейронной сети в соответствии с процедурой обратного распространения ошибки по аналогии с прототипом.
После обработки всех сигналов обучающего множества весовые связи нейронной сети сохраняют в блоке нейронной сети 6.
В процессе работы сигнал, подлежащий распознаванию, с выхода антенны 1 поступает на группу информационных входов аналого-цифрового преобразователя 2. По группе управляющих входов (шина 9) задаются параметры работы блока 2 (ΔT, ΔF, FS), аналогичные тем, что были использованы на подготовительном этапе. В функции блока 2 входит дискретизация аналогового радиосигнала длительностью ΔТ в полосе частот ΔF по времени и квантование по уровню с частотой дискретизации FS. Оцифрованный сигнал S(n) передают с выхода блока 2 на информационный вход блока расчета сигнала 3. Данный блок на основе дискретных значений сигнала S(n) рассчитывает его синфазную I и квадратурную Q составляющие, которые с выходов блока 3 поступают на информационные входы блока нормализации амплитуды 4. Квадратурные составляющие сигнала преобразуют в соответствии с (1) и (2), а полученные значения I1 и Q1 c выходов блока 4 далее следуют на информационные входы блока 5. Основной задачей блока расчета признаков 5 является формирование вектора признаков сигнала VS в соответствии с выражениями (3)-(15). Полученные элементы ВП параллельно поступают на информационные входы блока нейронной сети 6. Данные, поступающие на информационные входы блока 6, воздействуют на входы K соответствующих нейронов входного слоя 14.1-14.K. Последние выполняют функцию разветвителей на Н информационных выходов. Данные с выходов блоков 14.1-14.K передаются на соответствующие информационные входы нейронов скрытого слоя 15.1-15.H (см. фиг. 4). Каждый из блоков 15.1-15.H вычисляет (аналогично подготовительному этапу) линейную комбинацию данных со всех своих входов в сумматоре 17 в соответствии с (17). Данные с выхода сумматора 17.h каждого нейрона поступают на вход нелинейного преобразователя 18.h. Функцией нелинейного преобразователя является вычисление функции активации нейрона в соответствии с (16). Выход преобразователя 18 является выходом нейрона с нелинейной функцией активации. Далее по аналогии с входным слоем 11 данные с нейронов скрытого слоя 12 передаются на информационные входы нейронов 16.1-16.Е выходного слоя 13. Значения функций активации нейронов выходного слоя 13 вычисляют аналогично функциям активации нейронов скрытого слоя 12. В результате на выходе каждого нейрона 16.1-16.E выходного слоя 13 формируют значения, которые образуют вектор результатов работы блока нейронной сети 6 Fвых. Указанные величины параллельно поступают в блок принятия решения 7. По второй входной шине 10 на его вторую группу входов подают пороговое значение thrs. В функции блока 7 входит нормализация данных, поступивших на первую группу информационных входов в соответствии с (18), выбор элемента массива с наибольшим значением (аналогично логическому устройству МАХ в прототипе), сравнение значения максимального нормированного элемента массива Fnвых с пороговым значением thrs.
При выполнении условия MAX(Fnвых)>thrs блок 7 генерирует на своем выходе кодовую комбинацию, соответствующую определенному типу манипуляции радиосигнала. В противном случае считают, что тип манипуляции PC неизвестен, требуется повторная запись сигнала и его анализ.
В устройстве, реализующем предложенный способ, используются элементы и блоки, описанные в научно-технической литературе. Варианты реализации антенны 1 широко рассмотрены в литературе (см. Проектирование фазовых автоматических пеленгаторов. / Саидов А.С. И др. - М.: Радио и связь, 1997).
Реализация блока аналого-цифрового преобразователя 2 известна и трудностей не вызывает. Наиболее предпочтительным является вариант реализации блока 2 на базе микросхем AD7667 (см. Analog Devices: http://www.analog.com/en/products/analog-to-digital-converters/ad-converters/ad7667.html).
Блоки расчета сигнала 3, нормализации амплитуды 4 и расчета признаков 5 целесообразно выполнить на сигнальном процессоре TMS320c6416 (см. TMS320c6416: http://focus.ti.com/docs/prod/folders/print/TMS320c6416.html).
Реализация блока нейронной сети известна и трудностей не вызывает. Наиболее предпочтительным является вариант реализации блока 6 на базе нейро-процессора Л1879ВМ1 (NM6403) (см. http://www.module.ru/upload/files/vm1.pdf).
Блок принятия решения 7 может быть реализован на базе микропроцессора (см. Шевкоплес Б.В. / Микропроцессорные структуры. Инженерные решения: Справочник. - 2-е изд., перераб. и доп. - М.: Радио и связь, 1990. - 512 с.). В качестве последнего целесообразно использовать 16-разрядный микропроцессор К1810ВМ86.
Реализация блока индикации 8 известна и трудностей не вызывает (см. Сто схем с индикаторами / Быстров А.Ю и др. - М.: Радио и связь, 1990. - 112 с.).
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ автоматического распознавания типа манипуляции радиосигналов | 2016 |
|
RU2622846C1 |
| Способ и устройство автоматического распознавания типа манипуляции радиосигналов | 2017 |
|
RU2665235C1 |
| СПОСОБ И УСТРОЙСТВО АВТОМАТИЧЕСКОГО РАСПОЗНАВАНИЯ ТИПОВ МАНИПУЛЯЦИИ РАДИОСИГНАЛОВ | 2012 |
|
RU2510077C2 |
| УСТРОЙСТВО АВТОМАТИЧЕСКОГО РАСПОЗНАВАНИЯ ТИПОВ МАНИПУЛЯЦИИ РАДИОСИГНАЛОВ | 2019 |
|
RU2713693C1 |
| СПОСОБ РАСПОЗНАВАНИЯ ТИПОВ МАНИПУЛЯЦИИ РАДИОСИГНАЛОВ | 2018 |
|
RU2682304C1 |
| Способ и устройство распознавания типа радиолокационной станции по её излучению | 2023 |
|
RU2819570C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ СТРУКТУРЫ И ДЕМОДУЛЯЦИИ СИГНАЛА С НЕИЗВЕСТНОЙ СТРУКТУРОЙ | 2008 |
|
RU2386165C2 |
| Способ оперативной идентификации морских целей по их информационным полям на базе нейро-нечетких моделей | 2021 |
|
RU2763125C1 |
| Устройство для распознавания радиосигналов | 1985 |
|
SU1304045A2 |
| Система оперативной идентификации морских целей по их информационным полям на базе нейро-нечетких моделей | 2021 |
|
RU2763384C1 |
Изобретение относится к радиотехнике и может быть использовано для определения типа манипуляции априорно неизвестных радиосигналов. Достигаемый технический результат - повышение вероятности правильного распознавания анализируемых радиосигналов. Способ отличается тем, что расширяют векторы признаков эталонных и распознаваемых сигналов, после чего выполняют нормализацию амплитуды входного сигнала и вектора значений функции активации нейронов выходного слоя. 2 н. и 4 з.п. ф-лы, 7 ил.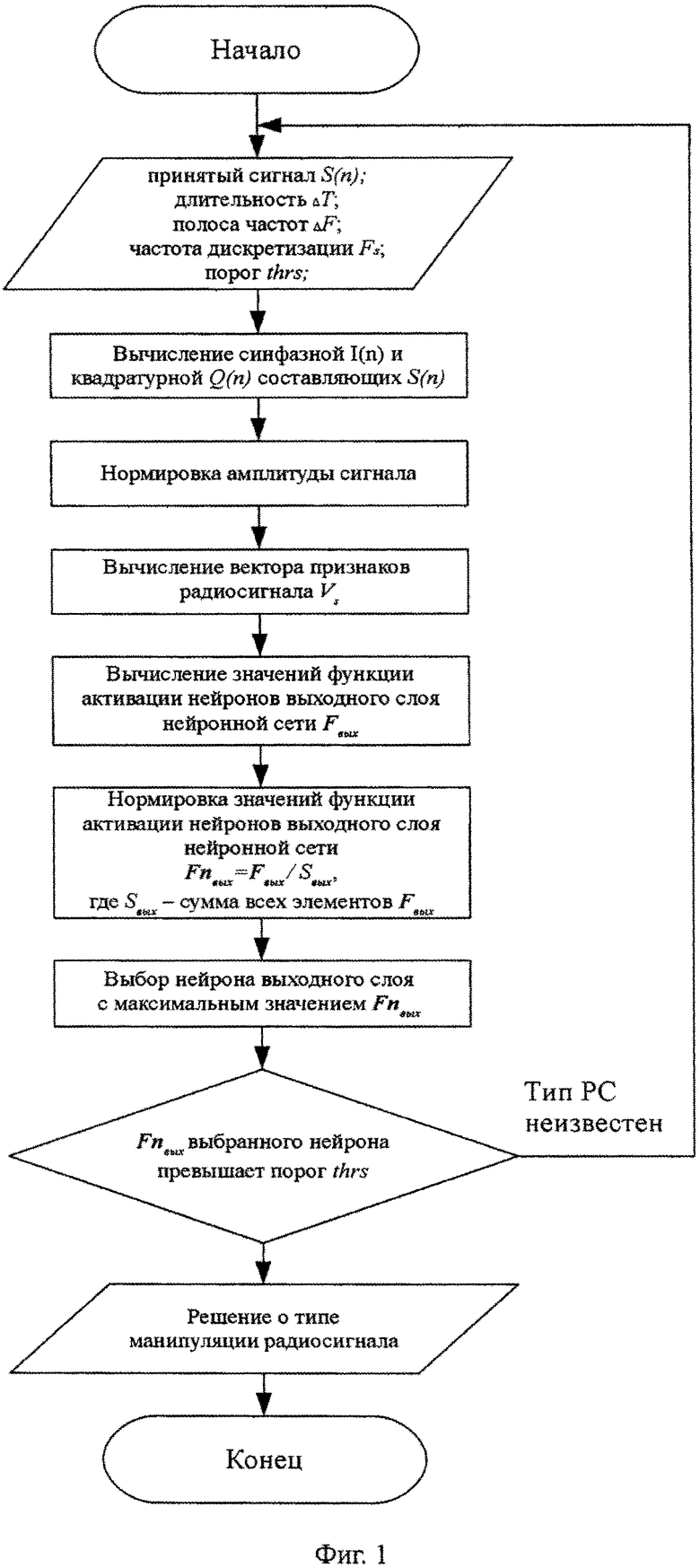
1. Способ автоматического распознавания типа манипуляции радиосигналов, заключающийся в том, что принятый аналоговый радиосигнал дискретизируют по времени и квантуют, формируют синфазную I и квадратурную Q составляющие оцифрованных отсчетов сигнала, по значениям синфазной и квадратурной составляющих N-отсчетов сигнала рассчитывают кумулянты CIIII, CII, CIIQQ, значения которых подают на входы предварительно обученным методом обратного распространения ошибки по значениям кумулянтов CIIII, CII, CIIQQ сигналов обучающей выборки нейронной сети типа многослойный персептрон, которая в автоматическом режиме распознает радиосигналы, отличающийся тем, что нормируют к единице среднее значение амплитуды сигнала, расширяют векторы признаков эталонных сигналов  , применяемых при обучении нейронной сети, и вектор признаков распознаваемого сигнала Vs путем вычисления кумулянтов второго CIQ, CQQ, третьего CIII, CIIQ, CIQQ, CQQQ и четвертого CIIIQ, CIQQQ, CQQQQ порядков, который подают на вход нейронной сети, а значения функции активации нейронов выходного слоя нормируют к единичной сумме.
, применяемых при обучении нейронной сети, и вектор признаков распознаваемого сигнала Vs путем вычисления кумулянтов второго CIQ, CQQ, третьего CIII, CIIQ, CIQQ, CQQQ и четвертого CIIIQ, CIQQQ, CQQQQ порядков, который подают на вход нейронной сети, а значения функции активации нейронов выходного слоя нормируют к единичной сумме.
2. Способ по п. 1, отличающийся тем, что среднее значение амплитуды сигнала нормируют к единице по формулам:
где 
3. Способ по п. 1, отличающийся тем, что дополнительные кумулянты второго порядка вычисляют по формулам:

где Х(n) - массив вещественных чисел с диапазоном индексов n от 1 до N, а и b - натуральные числа.
4. Способ по п. 1, отличающийся тем, что кумулянты третьего порядка определяют в соответствии с выражениями:


5. Способ по п. 1, отличающийся тем, что дополнительные кумулянты четвертого порядка находят в соответствии с выражениями:



6. Устройство автоматического распознавания типа манипуляции радиосигналов, содержащее последовательно соединенные антенну, аналого-цифровой преобразователь, обеспечивающий дискретизацию по времени и квантование радиосигнала, и блок расчета сигнала, предназначенный для формирования синфазной I и квадратурной Q составляющих n отсчетов сигнала, последовательно соединенные блок расчета признаков CIIII, CII, CIIQQ и блок нейронной сети типа многослойный персептрон, состоящий из K-ячеек входного слоя, H-ячеек скрытого слоя и E-ячеек выходного слоя, причем каждая ячейка предыдущего слоя соединена весовой связью с каждой ячейкой последующего, а каждая ячейка блока нейронной сети состоит из последовательно соединенных сумматора и нелинейного преобразователя, отличающееся тем, что дополнительно введены блок нормализации амплитуды, предназначенный для нормирования к единице среднего значения амплитуды сигнала, группа информационных входов которого соединена с группой информационных выходов блока расчета сигнала, а группа информационных выходов соединена с группой информационных входов блока расчета признаков, последовательно соединенные блок принятия решения, предназначенный для нормирования к единичной сумме функций активации нейронов выходного слоя, сравнения максимального значения из нормализованных функций активации нейронов выходного слоя с порогом и задания соответствия между номером нейрона выходного слоя и кодовой комбинации, определяющей тип манипуляции радиосигнала, и блок индикации, причем первая группа информационных входов блока принятия решения соединена с группой информационных выходов блока нейронной сети, а вторая группа информационных входов является второй входной шиной устройства автоматического распознавания типа манипуляции радиосигналов, предназначена для задания порогового уровня, а первая группа его информационных входов соединена с группой входов управления аналого-цифрового преобразователя и предназначена для задания частоты дискретизации Fs, полосы частот оцифровываемого сигнала ΔF и длительности ΔT, а блок расчета признаков предназначен для определения дополнительных кумулянтов второго CIQ, CQQ, третьего CIII, CIIQ, CIQQ, CQQQ и четвертого CIIIQ, CIQQQ, CQQQQ порядков.
| СПОСОБ И УСТРОЙСТВО АВТОМАТИЧЕСКОГО РАСПОЗНАВАНИЯ ТИПОВ МАНИПУЛЯЦИИ РАДИОСИГНАЛОВ | 2012 |
|
RU2510077C2 |
| УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ ЧАСТОТЫ, ВИДА МОДУЛЯЦИИ И МАНИПУЛЯЦИИ ПРИНИМАЕМЫХ СИГНАЛОВ | 2013 |
|
RU2573718C2 |
| СПОСОБ РАСПОЗНАВАНИЯ РАДИОСИГНАЛОВ | 2014 |
|
RU2551903C1 |
| Устройство для закрепления лыж на раме мотоциклов и велосипедов взамен переднего колеса | 1924 |
|
SU2015A1 |

