Изобретения относятся к радиотехнике и могут быть использованы для определения типа источника радиоизлучения (радиолокационной станции) в системах радиотехнического контроля (РТК).
Методы распознавания типа источника радиоизлучения (ИРИ) занимают одно из центральных мест при анализе и обработке данных РТК (см. Мельников Ю.П. Воздушная радиотехническая разведка, методы оценки эффективности. - М.: Радиотехника, 2005. - С. 290). Последние требуют от оператора знания ряда параметров, определяющих количество типов (классов) ИРИ, форму и размер областей в пространстве признаков, соответствующих отдельным классам. На практике операторы, как правило, не имеют априорной информации, необходимой для выбора этих параметров. Кроме того, простые математические модели, лежащая в основе применяемых алгоритмов, не позволяют выделять классы с усложненной частотно-временной структурой (ЧВС), которые наиболее адекватно отражают реальные данные. Указанные недостатки часто приводят к неудовлетворительным результатам распознавания типа ИРИ.
Известны способы и устройства автоматического распознавания типа манипуляции радиосигналов (см. пат. РФ №2619717, 2622846, 26652235 и др., МПК G06N 3/02), обеспечивающие определение типа манипуляции сигналов априорно неизвестных источников радиоизлучений на основе использования нейронных сетей (НС). Аналоги обеспечивают повышение вероятности правильного распознавания анализируемых радиосигналов. Однако с их помощью затруднено определить тип радиолокационной станции (РЛС) из-за отсутствия выполнения частотно-временного анализа.
Известен способ распознавания типа источника радиоизлучения (см. Мельников Ю.П. Воздушная радиотехническая разведка. Методы оценки эффективности. - М.: Радиотехника, 2005. - С.290), в основу которого положена оценка распределения апостериорных вероятностей для каждой комбинации значений измеренных параметров. Недостатком аналога является необходимость знания априорных вероятностей приема сигнала от РЛС 1-го типа, что на практике связано с определенными сложностями и ограничениям его применения.
Известен способ идентификации сигналов (см. Пат. РФ №2485586, МПК G06K 9/62, опубл. 2013 г.). Он предусматривает предварительный этап, этапы обучения и распознавания. В процессе обучения формируют эталонные классы сигналов, отличающихся между собой значениями идентификаторов, и осуществляют их запоминание для последующего использования при идентификации текущих анализируемых сигналов.
На этапе распознавания анализируемый сигнал преобразуют к заданному на предварительном этапе виду, принимают решение о его принадлежности к одному из эталонных классов.
Аналог обеспечивает снижение временных затрат на выполнение процедуры идентификации анализируемого сигнала и сокращение объема памяти, необходимой для хранения эталонных описаний сигналов.
Однако аналогу присущ недостаток, ограничивающий его применение. Последний состоит в отсутствии возможности принятия решения в пользу того или иного класса в условиях пересечения значений их признаков.
Наиболее близким по технической реализации к предлагаемому является способ распознавания типа РЛС по ее излучению (см. Коротков В.Ф., Зырянов Р.С. Алгоритм распознавания источника радиоизлучения с использованием радиальных базисных функций // Изв. вузов России. Радиоэлектроника. - 2017. - №1. - С.12-16).
Он заключается в приеме аналогового сигнала РЛС и преобразовании его в цифровую форму, формировании дескрипторов его импульсов и принятии решения о типе РЛС предварительно обученной НС на базе радиальных базисных функций.
Прототип обеспечивает снижение временных затрат на выполнение процедуры идентификации анализируемого сигнала за счет формирования последовательности дескрипторов (описаний) импульсов, которая подается на вход предварительно обученной методом k-средних нейронную сеть на базе радиальных базисных функций.
Для оценивания неизвестной плотности распределения ИРИ в пространстве признаков в прототипе используют непараметрическую оценку Парзена (см. Дуда Р., Харт П. Распознавание образов и анализ цен. - М.: Мир, 1976. - 509 с). Преимущество данного подхода состоит в том, что он не накладывает ограничений на размер и форму областей анализируемых классов в пространстве признаков.
Существенным недостатком способа-прототипа является то, что он основан на четкой модели при принятии решения о принадлежности ИРИ к их определенным типам и эвристическом характере задания параметра k для метода k-средних. Это приводит на практике к неудовлетворительным результатам радиотехнического контроля, а именно недостаточной точности распознавания ИРИ в случае, если описания анализируемых сигналов пересекаются.
Целью заявляемого способа распознавания типа РЛС по ее излучению является повышение точности распознавания в условиях пересечения признаковых описаний сигналов, принадлежащих различным типам РЛС.
Поставленная цель достигается тем, что в известном способе распознавания типа РЛС по ее сигналам, заключающегося в том, что принимают аналоговый сигнал РЛС и преобразуют его в цифровую форму, формируют дескрипторы его импульсов и принимают решение о типе РЛС предварительно обученной нейросетью на базе радиальных базисных функций, обучение промежуточного (слоя 1) НС выполняют путем предварительного определения числа K нейронов данного слоя, а расчет весовых коэффициентов  осуществляют по методу k-средних и грубых множеств, где K-мерное пространство признаков делят на L кластеров, при этом для каждого кластера формируют две аппроксимирующие его области: нижнюю
осуществляют по методу k-средних и грубых множеств, где K-мерное пространство признаков делят на L кластеров, при этом для каждого кластера формируют две аппроксимирующие его области: нижнюю  с коэффициентом важности
с коэффициентом важности  и верхнюю
и верхнюю  с коэффициентом важности
с коэффициентом важности  где
где  - множество наблюдений, отнесенных к кластеру
- множество наблюдений, отнесенных к кластеру 
 - количество таких наблюдений, R - отношение эквивалентности,
- количество таких наблюдений, R - отношение эквивалентности,  - число элементов
- число элементов  на границе между данными кластерами, а отнесение каждого элемента обучающей выборки X к граничащим кластерам выполняют по правилу: если для любой пары кластеров
на границе между данными кластерами, а отнесение каждого элемента обучающей выборки X к граничащим кластерам выполняют по правилу: если для любой пары кластеров  выполняется условие
выполняется условие  в противном случае
в противном случае  принимает минимальное значение для всех
принимает минимальное значение для всех  где
где  - евклидово расстояние между n-ым элементом выборки наблюдения и центром i-го кластера,
- евклидово расстояние между n-ым элементом выборки наблюдения и центром i-го кластера,  Δ - порог,
Δ - порог,  - обозначение размерности множества.
- обозначение размерности множества.
При этом положение центра кластера  определяют в соответствии с методом k-средних и грубых множеств
определяют в соответствии с методом k-средних и грубых множеств

Нахождение числа нейронов нейросети начинают с приходом первого дескриптора импульса х1 сигнала РЛС и определения первого нейрона слоя 1 с весами, равными компонентам вектора х1. Последнему присваивают метку области с центром wi и радиусом, равным σi. С приходом очередного входного вектора xn определяют его принадлежность к ранее образованным кластерам Si:

где J - число нейронов, полученных на n-м шаге выполняемого анализа,  - обозначение меры близости двух векторов, в качестве которой используют евклидово расстояние. При выполнении неравенства модифицируют веса данного нейрона в соответствии с выражением
- обозначение меры близости двух векторов, в качестве которой используют евклидово расстояние. При выполнении неравенства модифицируют веса данного нейрона в соответствии с выражением

где Nj - число входных векторов, попавших в кластер j-го нейрона. В противном случае формируют новый нейрон, веса которого равны компонентам входного вектора, а метка соответствует новому кластеру многомерного пространства признаков.
Благодаря новой совокупности существенных признаков в заявленном способе за счет использования дополнительной процедуры определения числа нейронов промежуточного слоя и их начальных весовых коэффициентов wj и окончательной настройки данных коэффициентов с помощью процедуры k-средних на базе приближенных множеств (см. Pawlak, Z. Rough sets. International journal of computer and information science. - 1982. - 11 (5). - pp.341-356) для обучения промежуточного слоя достигают повышение вероятности распознавания типа РЛС при пересечении их признаков.
Известно устройство автоматического распознавания типа манипуляции радиосигналов (см. Пат. РФ №2619717, МПК G06N 3/02, опубл. 17.05.2017). Оно содержит последовательно соединенные антенну, аналого-цифровой преобразователь, блок расчета сигнала, блок нормирования амплитуды, блок расчета признаков, блок нейронной сети, блок принятия решения, блок индикации и две входных шины.
Аналог обеспечивает повышение вероятности правильного распознавания анализируемых радиосигналов путем расширения вектора признаков, выполнения нормирования амплитуды входного сигнала и вектора значений функции активации нейронов выходного слоя.
Однако аналогу присущ недостаток, ограничивающий его применение. В последнем не предусмотрено выполнение частотно-временного анализа, что не позволяет делать вывод о принадлежности анализируемого излучения к тому или иному типу РЛС.
Наиболее близким по своей технической сущности является устройство распознавания типа РЛС по ее излучению (см. Короткое В.Ф., Зырянов Р.С.Алгоритм распознавания источника радиоизлучения с использованием радиальных базисных функций // Изв. вузов России. Радиоэлектроника. - 2017. - №1. - С.12-16). Устройство-прототип содержит последовательно соединенные антенну, радиоприемные устройство, тракт цифровой обработки сигналов (ЦОС), состоящий из последовательно соединенных блока формирования синфазной и квадратурной составляющих радиосигнала (БФК), блока расчета дескриптора импульса (БРД) и блока нейронной сети, выход которой является выходом тракта ЦОС, а выход БФК является входом тракта ЦОС и соединен с выходом радиоприемного устройства, и блок принятия решения.
Прототип обеспечивает снижение временных затрат на выполнение процедуры идентификации анализируемого сигнала за счет формирования последовательности дескрипторов импульсов, которая подается на вход предварительно обученной методом k-средних нейронную сеть на базе радиальных базисных функций.
Существенным недостатком прототипа является то, что он основан на четкой (точной) априорно описанной модели анализируемых сигналов при принятии решения о принадлежности ИРИ к их определенным типам и известном значении параметра K для метода k-средних. Это приводит к неудовлетворительным результатам РТК (низкой точности распознавания типа ИРИ в случае, если описания анализируемых сигналов пересекаются).
Целью заявляемого устройства распознавания типа РЛС по ее излучению является повышение точности распознавания сигналов ИРИ в условиях пересечения их признаковых описаний.
Поставленная цель достигается тем, что в известное устройство распознавания типа РЛС по ее излучению, содержащее последовательно соединенные антенну, радиоприемное устройство, тракт цифровой обработки сигналов, состоящий из последовательно соединенных блока формирования синфазной и квадратурной составляющих радиосигнала, блока расчета дескриптора импульса и блока нейронной сети, выход которой является выходом тракта ЦОС, а вход БФК является первым входом тракта ЦОС и соединен с выходом радиоприемного устройства, и блок принятия решения, в тракт ЦОС дополнительно введены последовательно соединенные блок начального определения количества нейронов первого слоя K (БНО) и блок вычисления весов первого слоя (БВВ) по методу k-средних и грубых множеств, выход которого соединен со вторым входом блока нейросети, а вход БНО является вторым входом тракта ЦОС и входом обучающей выборки устройства распознавания типа РЛС по ее излучению.
Благодаря введению новых элементов (блока начального определения нейронов первого слоя и блока уточнения весов первого слоя) и связей достигается повышение точности распознавания типа РЛС в условиях пересечения признаков их описаний.
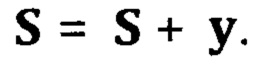
Заявляемые объекты поясняются чертежами, на которых представлены: на фиг.1 структура нейросети;
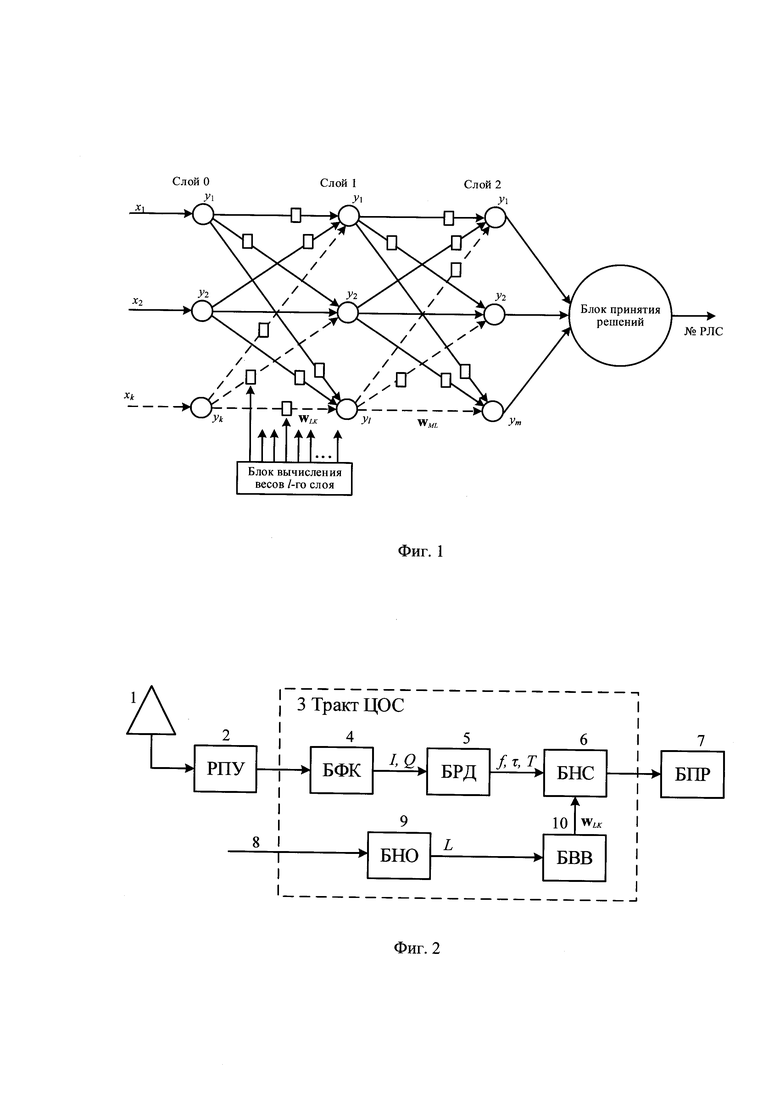
на фиг.2 структурная схема устройства распознавания типа РЛС по ее излучению;
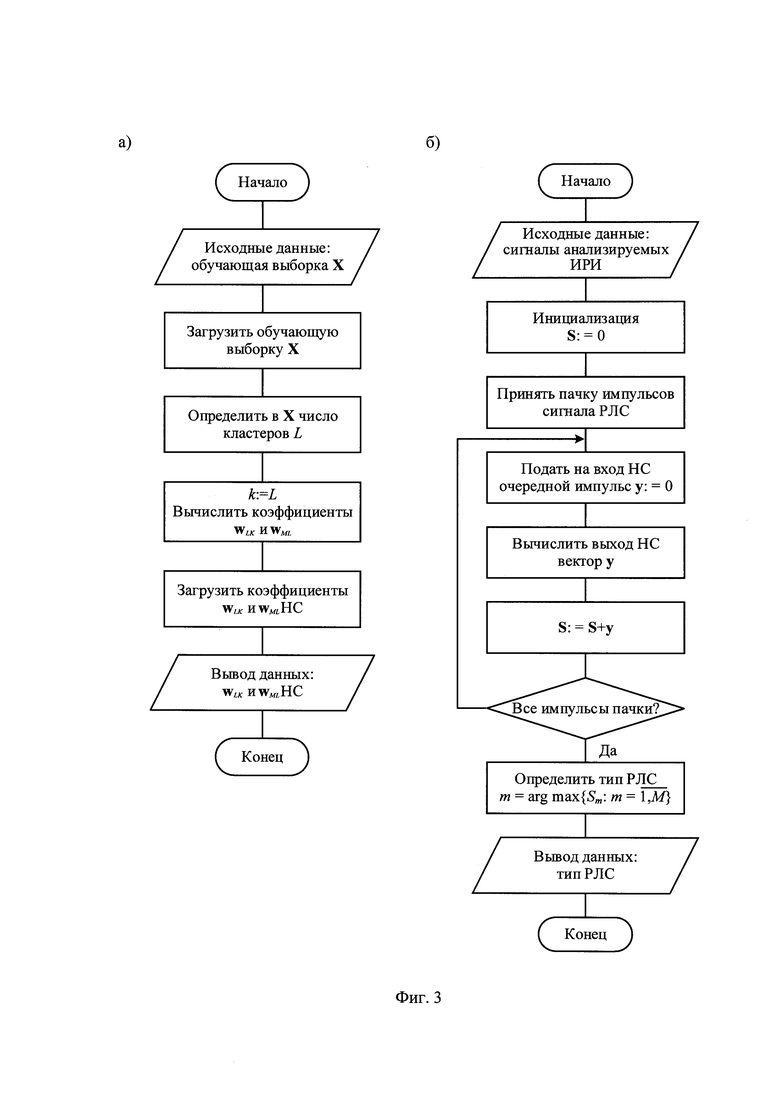
на фиг.3: а) обобщенный алгоритм этапа обучения НС;
б) обобщенный алгоритм распознавания типа РЛС по ее излучению.
Сущность изобретения состоит в следующем. При решении задач, связанных с анализом и обработкой данных РТК, методы распознавания занимают одно из центральных мест. Поскольку распознавание осуществляют в условиях большого количества излучений различных радиоэлектронных средств, то эта задача является вероятностной.
Представим излучения на входе станции РТК в виде N-мерной выборки  элементы которой связаны с одним из распознаваемых типов ИРИ (см. фиг.3). Здесь
элементы которой связаны с одним из распознаваемых типов ИРИ (см. фиг.3). Здесь  представляет собой K-мерный вектор параметров n-го импульса сигнала (дескриптора импульса). В пространстве признаков xn представляется точкой. Совокупность однородных точек образует области (кластеры), число которых для одного типа ИРИ может составлять от одного до 50-ти. Кластеры, принадлежащие разным типам ИРИ, могут пересекаться, т.е. их границы не являются четкими.
представляет собой K-мерный вектор параметров n-го импульса сигнала (дескриптора импульса). В пространстве признаков xn представляется точкой. Совокупность однородных точек образует области (кластеры), число которых для одного типа ИРИ может составлять от одного до 50-ти. Кластеры, принадлежащие разным типам ИРИ, могут пересекаться, т.е. их границы не являются четкими.
Требуется построить решающее правило, которое позволило бы по предъявленной выборки X указать класс (тип ИРИ). При этом возможна неопределенность указания класса.
Для решения данной задачи может быть использована радиальная нейронная сеть, структурная схема которой представлена на фиг.1.
Сеть состоит из трех слоев нейронов (см. Короткое В.Ф., Зырянов Р.С. Алгоритм распознавания источника радиоизлучения с использованием радиальных базисных функций // Изв. вузов России. Радиоэлектроника. - 2017. - №1. - С 12-16).
Слой 0 - входной. Число нейронов слоя 0 равно числу признаков распознавания (числу элементов дескриптора импульса) K. В качестве последних могут быть использованы: несущая частота ƒ, длительность τ и период повторения импульса Т. Выход k-то нейрона слоя
Слой 1 (промежуточный) составляют радиальные нейроны с гауссовской функцией активации
где  - весовой коэффициент связи
- весовой коэффициент связи  нейрона
нейрона  слоя 1 с k-м нейроном слоя 0;
слоя 1 с k-м нейроном слоя 0;  - порог
- порог  нейрона слоя 1, соединенного с k-м нейроном 0-го слоя; L - число нейронов слоя 1.
нейрона слоя 1, соединенного с k-м нейроном 0-го слоя; L - число нейронов слоя 1.
Центр РБФ (весовые коэффициенты)  нейрона слоя 1 обозначим в виде вектора
нейрона слоя 1 обозначим в виде вектора  а его пороги - как вектор
а его пороги - как вектор 
Нейроны слоя 2 (выходного) выполняют линейное преобразование (взвешенное суммирование) вектора состояния промежуточного слоя:

где  - весовой коэффициент связи m-го нейрона слоя 2 с
- весовой коэффициент связи m-го нейрона слоя 2 с  нейроном слоя 1;
нейроном слоя 1;
М - число нейронов выходного слоя.
Эффективность данной сети в значительной степени связана с методом формирования требуемого числа радиальных нейронов и их параметров.
Одним из его наиболее известных методов является процедура последовательной кластеризации - метод k-средних (см. Bishop С.Neural Networks for Pattern Recognition. Oxford: University Press, 1995).
Данный метод разбивает исходное множество элементов обучающей выборки X на k непересекающихся подмножеств (кластеров). При этом любой элемент из X принадлежит только одному кластеру.
Недостатками данной процедуры является чисто эвристический характер задания требуемого числа кластеров к и то, что он не позволяет одному и тому же элементу наблюдения принадлежать одновременно двум и более кластерам, т.е. не рассматривает случай пересекающихся подмножеств.
В заявляемом способе предлагается производить настройку параметров слоя 1 РБФ-сети с использованием теории приближенных множеств (ТПМ), английский термин - rough set (см. Pawlak, Z. Rough sets. International journal of computer and information science. - 1982. - 11 (5). - p.341-356; Ali S.A., et al., K-means clustering to improve the accuracy of decision tree response classification. Information technology journal - 2009. - 8 (8). - p.1256-1262).
В соответствии с геометрической интерпретацией задачи распознавания НС с РБФ делит K-мерное пространство признаков на L областей (кластеров), каждая из которых содержит точки, принадлежащие только одному типу ИРИ.
Обозначим 1-ый кластер как  а его центр в пространстве K признаков -
а его центр в пространстве K признаков -  Определим для каждого такого кластера две аппроксимирующие его области: нижнюю
Определим для каждого такого кластера две аппроксимирующие его области: нижнюю  с коэффициентом важности
с коэффициентом важности  и верхнюю
и верхнюю  с коэффициентом важности
с коэффициентом важности  . Здесь
. Здесь  - множество наблюдений, отнесенных к
- множество наблюдений, отнесенных к 
 - количество таких наблюдений, R - отношение эквивалентности. Тогда число элементов
- количество таких наблюдений, R - отношение эквивалентности. Тогда число элементов  на границе между данными областями есть разность
на границе между данными областями есть разность  Определим правило, по которому можно отнести каждый элемент выборки X к упомянутым выше областям. Если для любой пары кластеров
Определим правило, по которому можно отнести каждый элемент выборки X к упомянутым выше областям. Если для любой пары кластеров  выполняется условие
выполняется условие  то
то  в противном случае
в противном случае  а величина
а величина  принимает минимальное значение для всех
принимает минимальное значение для всех  Здесь
Здесь  - евклидово расстояние между n-ым элементом выборки наблюдения и центром i-кластера,
- евклидово расстояние между n-ым элементом выборки наблюдения и центром i-кластера, - порог. Полагаем, что число элементов в
- порог. Полагаем, что число элементов в  удовлетворяет условию
удовлетворяет условию

где  - обозначение размера множества. Значение порогового уровня Δ устанавливают эмпирически на этапе обучения НС.
- обозначение размера множества. Значение порогового уровня Δ устанавливают эмпирически на этапе обучения НС.
Обучение скрытого слоя НС можно описать как последовательность 2-х процедур (см. фиг.3а).
1. Определяют число кластеров L во входной выборке (параметра k для метода k-средних). Процедуру начинают с подачи на нейроны слоя 0 первого входного вектора х1 и определяют первый нейрон слоя 1 с весами, равными компонентам вектора х1. Этому нейрону присваивают метку области, являющейся полем влияния данного нейрона. Под полем влияния  нейрона слоя 1 понимаются все точки многомерного пространства признаков, входящие в гиперсферу с центром
нейрона слоя 1 понимаются все точки многомерного пространства признаков, входящие в гиперсферу с центром  и радиусом, равным σi.
и радиусом, равным σi.
Затем на вход сети подают очередной входной вектор  и определяют его принадлежность к ранее образованным областям
и определяют его принадлежность к ранее образованным областям 

где J - число нейронов (областей), образованных на n-м шаге алгоритма;  - обозначение меры близости двух векторов, в качестве которой используется евклидово расстояние. Если данное неравенство выполняется, т.е. входной вектор попадает в поле влияния одного из нейронов скрытого слоя, производят модификацию весов данного нейрона. В противном случае формируется новый нейрон, веса которого равны компонентам входного вектора, а метка соответствует новой области многомерного пространства признаков.
- обозначение меры близости двух векторов, в качестве которой используется евклидово расстояние. Если данное неравенство выполняется, т.е. входной вектор попадает в поле влияния одного из нейронов скрытого слоя, производят модификацию весов данного нейрона. В противном случае формируется новый нейрон, веса которого равны компонентам входного вектора, а метка соответствует новой области многомерного пространства признаков.
Уравнение модификации весов нейрона, в поле влияния которого попадает входной вектор, имеет вид

где  - число входных векторов, попавших в поле влияния j-го нейрона.
- число входных векторов, попавших в поле влияния j-го нейрона.
2. Уточняют положение центров кластеров с учетом нечеткости их границ. Вычисляют новое положение центра кластера  по формуле
по формуле

Относят каждый элемент  выборки наблюдений к ближайшему центру
выборки наблюдений к ближайшему центру  и определяют его принадлежность (в соответствии с вышеописанным правилом) к нижней или верхней области кластера
и определяют его принадлежность (в соответствии с вышеописанным правилом) к нижней или верхней области кластера  . Повторяют данную процедуру, пока центры кластеров не перестанут изменяться.
. Повторяют данную процедуру, пока центры кластеров не перестанут изменяться.
Устройство распознавания типа РЛС по ее излучению (см. фиг.2) содержит последовательно соединенные антенну 1, радиоприемное устройство (РПУ) 2, тракт цифровой обработки сигналов 3, состоящий из последовательно соединенных блока формирования синфазной и квадратурной составляющих сигнала 4, предназначенный для преобразования сигнала в цифровую форму и формирования на его основе квадратурных составляющих I и Q сигнала, блока расчета дескриптора импульса 5 и блока нейронной сети с радиальными базисными функциями 6, состоящий из K-нейронов входного (нулевого) слоя, L-нейронов промежуточного слоя (первого), М-нейронов выходного (второго) слоя, причем каждый нейрон промежуточного слоя соединен весовой связью с каждым нейроном входного слоя, каждый нейрон выходного слоя соединен весовой связью с каждым нейроном промежуточного слоя, а каждый нейрон выходного слоя является индикатором соответствующего типа РЛС, причем вход БФК 4 является первым входом тракта ЦОС 3, а выход БНС 6 - выходом тракта ЦОС 3, и блок принятия решения 7, в тракт ЦОС 3 дополнительно введены последовательно соединенные блок начального определения количества нейронов первого слоя 9 и блок вычисления весов первого слоя 10 по методу k-средних и грубых множеств, выход которого соединен со вторым входом блока нейросети 6, а вход БНО 9 является вторым входом тракта ЦОС 3 и входом обучающей выборки устройства распознавания типа РЛС по ее излучению 8.
Заявленное устройство на этапе обучения (см. фиг.2, 3а) с помощью блоков 9 и 10 реализует функции (1) - (3). Значение порогового уровня Д задают в блок 10 на подготовительном этапе, которое далее используют на этапе обучения и распознавания в промежуточном слое НС 6. На вход блока начального определения нейронов первого слоя 9 по шине 6 подают априорно известную обучающую выборку. В функции блока 9 входит определение числа кластеров L во входной обучающей выборке (параметра к для метода k-средних). Данная операция выполняется в соответствии с выражением (1).
В функции блока 10 входит вычисление весов первого слоя НС по методу k-средних и грубых множеств и уточнение положения центров кластеров с учетом нечеткости их границ (выражения 2 и 3). Эти операции в блоке 10 выполняют на основе результатов, полученных в блоке 9. Сформированные в блоке 10 весовые коэффициенты wik поступают на второй вход БНС 6 и используются в процессе распознавания тира ИРИ.
Заявленное устройство на этапе распознавания типа РЛС по ее излучению работает следующим образом (см. фиг.2, 3б).
Принимаемый на антенну 1 радиосигнал, принадлежность к типу РЛС, которого необходимо определить, поступает на РПУ 2 и далее на вход БФК 4. Здесь осуществляют преобразование принятого сигнала в цифровую форму и формирование синфазной I и квадратурной Q составляющих радиосигнала, которые с выхода БФК 4 поступают на вход БРД 5. В блоке БРД 5 по каждому импульсу осуществляют расчет значений признаков распознавания ƒ, τ и Т. Значения последних ƒ, τ и Т с выхода БРД 5 поступают на входной слой 0 БНС 6 и далее без преобразования транслируются на промежуточный слой 1 (предварительно обученного по методу k-средних и грубых множеств). Каждый нейрон слоя 1 состоит из преобразователя, реализующего гауссову функцию вида
а каждый нейрон слоя 2 состоит из преобразователя, реализующего функцию вида

где  - весовой коэффициент связи
- весовой коэффициент связи  нейрона
нейрона  слоя 1 с k-м нейроном слоя 0;
слоя 1 с k-м нейроном слоя 0;  - порог
- порог  нейрона слоя 1, соединенного с k-м нейроном 0-го слоя; L - число нейронов слоя 1,
нейрона слоя 1, соединенного с k-м нейроном 0-го слоя; L - число нейронов слоя 1,  - весовой коэффициент связи m-го нейрона слоя 2 с
- весовой коэффициент связи m-го нейрона слоя 2 с  нейроном слоя 1; М - число нейронов выходного слоя. Выход каждого нейрона выходного слоя поступает на блок принятия решения 7. В функции последнего входит принятия решения о типе РЛС, излучение которого обнаружено.
нейроном слоя 1; М - число нейронов выходного слоя. Выход каждого нейрона выходного слоя поступает на блок принятия решения 7. В функции последнего входит принятия решения о типе РЛС, излучение которого обнаружено.
Данное решение основывается на отклике активного нейрона выходного слоя  m = 1, М, БНС 6. Отклики накапливаются по времени в блоке принятия решений 7 согласно принятым решениям о принадлежности к классам (ИРИ).
m = 1, М, БНС 6. Отклики накапливаются по времени в блоке принятия решений 7 согласно принятым решениям о принадлежности к классам (ИРИ).
Блок принятия решений 7 представляет собой временную память, состоящую из М элементов (по числу распознаваемых типов ИРИ).
При инициализации вектор S решений о типах ИРИ устанавливают равным нулю. Выходы активных нейронов  классификатора накапливают согласно формуле
классификатора накапливают согласно формуле
Тип ИРИ определяют в блоке 7 после обработки последнего импульса радиосигнала по формуле

Реализация устройства известна и трудностей не вызывает. В качестве антенны 1 могут быть использованы спиральные антенны (см. Антенны измерительные АС 8.33.1 - АС 8.33.2, ОАО «НПЦ СКАРД», Россия).
Радиоприемное устройство 2 может быть реализовано по известной схеме (см. М.Н. Воропай, С.В. Иванов. Синтез структуры и реализация широкополосного радиоприемного устройства в диапазоне рабочих частот 0,02…18 ГГц для комплексов радиомониторинга // ИВД 2010, №2, с. 108-120).
Измерение несущей частоты импульса ƒ, длительности импульса т и периода повторения Т (БРД 5) осуществляют с помощью быстрого преобразования Фурье с функциональной обработкой входных сигналов на программируемых логических интегральных схемах семейства Virtex-5 фирмы Xilinx, сигнальном процессоре TMS320C6455. На этих же элементах выполняют вычисления в БФК 4, БНС 6, БНО 9 и БВВ 10.
В рамках представленных материалов выполнено моделирование и сравнительная оценка предложенного способа распознавания типа ИРИ и способа-прототипа.
Предложенная РБФ-сеть программно реализована в среде MATLAB. Для оценки ее эффективности проведено 2 эксперимента по распознаванию контрольной выборки из 100 излучений, принадлежащих типовому радиолокационному полю Европейского театра, составленного по материалам журнала Зарубежное военное обозрение, 1986, №1, 3, 5; 1987, №1, 2, 5, 8-11; 1988, №1, 2, 6; 1989, №2, 6, 8-10; 1990, №8, 11, 12; 1991, №1, 5, 7, 8-10; 1992, №2; 1993, №8 и др., принадлежащих 17-ти типам ИРИ.
Первый эксперимент проведен на известной модели обучения РБФ-сети (прототип), второй - с использованием предлагаемого способа на основе теории приближенных множеств (см. Pawlak, Z. Rough sets. International journal of computer and information science. - 1982. - 11 (5). - pp. 341-356). Использовались следующие настраиваемые параметры: порог Δ = 0,01, коэффициент важности αс=0,9, коэффициент важности αu - 0,1. В первом эксперименте получено 83% правильных ответов, во втором - 94%.
Результат эксперимента показывает возможность повышения качества распознавания с использованием предлагаемого способа.
Использование НС описанной архитектуры наиболее эффективно в случае априорной неопределенности данных радиотехнического наблюдения и когда предъявляются жесткие требования к вероятности ложной классификаций.
Группа изобретений относятся к пассивной радиолокации и может быть использована в радиотехнических средствах для определения типа радиолокационной станции (РЛС) по ее излучению. Техническим результатом является повышение точности распознавания в условиях пересечения признаковых описаний сигналов, принадлежащих различным типам РЛС. Устройство содержит антенну, радиоприемное устройство, тракт цифровой обработки сигналов, состоящий из блока формирования синфазной и квадратурной составляющих радиосигнала, блока расчета дескриптора импульса, блока нейронной сети, блока начального определения количества нейронов первого слоя и блока вычисления весов первого слоя по методу k-средних и грубых множеств, и блок принятия решения. 2 н. и 2 з.п. ф-лы, 4 ил.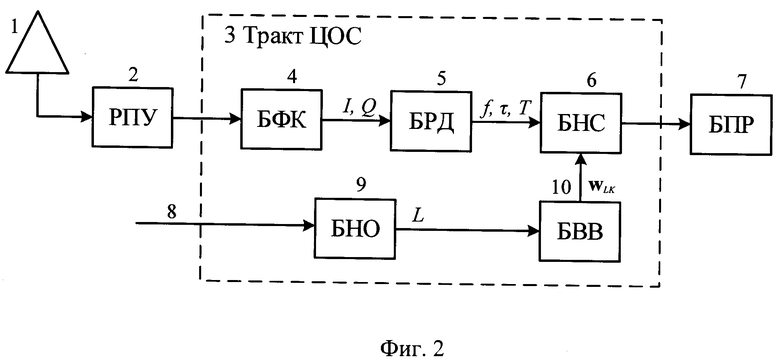
1. Способ распознавания типа радиолокационной станции (РЛС) по ее излучению, заключающийся в том, что принимают аналоговый сигнал РЛС и преобразуют его в цифровую форму, формируют дескрипторы его импульсов и принимают решение о типе РЛС предварительно обученной нейросетью (НС) на базе радиальных базисных функций, отличающийся тем, что обучение слоя 1 НС выполняют путем предварительного определения числа нейронов данного слоя, а расчет весовых коэффициентов  осуществляют по методу k-средних и грубых множеств, где K-мерное пространство признаков, которое делят на L кластеров, при этом для каждого кластера формируют две аппроксимирующие его области: нижнюю
осуществляют по методу k-средних и грубых множеств, где K-мерное пространство признаков, которое делят на L кластеров, при этом для каждого кластера формируют две аппроксимирующие его области: нижнюю  с коэффициентом важности αс и верхнюю
с коэффициентом важности αс и верхнюю  с коэффициентом важности αu, где
с коэффициентом важности αu, где  - множество наблюдений, отнесенных к кластеру Si, Ni - количество таких наблюдений, R - отношение эквивалентности,
- множество наблюдений, отнесенных к кластеру Si, Ni - количество таких наблюдений, R - отношение эквивалентности,  - число элементов Xi на границе между данными кластерами, а отнесение каждого элемента обучающей выборки X к граничащим кластерам выполняют по правилу: если для любой пары кластеров
- число элементов Xi на границе между данными кластерами, а отнесение каждого элемента обучающей выборки X к граничащим кластерам выполняют по правилу: если для любой пары кластеров  выполняется условие
выполняется условие  в противном случае
в противном случае  din принимает минимальное значение для всех 1 ≤ i ≤ k, где din = ||xn - wi|| - евклидово расстояние между n-м элементом выборки наблюдения и центром i-го кластера, 1 ≤ i,j ≤ k, Δ - порог,
din принимает минимальное значение для всех 1 ≤ i ≤ k, где din = ||xn - wi|| - евклидово расстояние между n-м элементом выборки наблюдения и центром i-го кластера, 1 ≤ i,j ≤ k, Δ - порог,  - обозначение размерности множества.
- обозначение размерности множества.
2. Способ по п. 1, отличающийся тем, что положение центра кластера Si определяют в соответствии с методом k-средних и грубых множеств

3. Способ по п. 1, отличающийся тем, что нахождение числа нейронов нейросети начинают с приходом первого дескриптора импульса х1 сигнала РЛС и определения первого нейрона слоя 1 с весами, равными компонентам вектора х1, которому присваивают метку области с центром wi и радиусом, равным σi, с приходом очередного входного вектора xn определяют его принадлежность к ранее образованным кластерам Si:

где J - число нейронов, полученных на n-м шаге выполняемого анализа, ||⋅|| - обозначение меры близости двух векторов, в качестве которой используют евклидово расстояние, при выполнении неравенства модифицируют веса данного нейрона в соответствии с выражением

где Nj - число входных векторов, попавших в кластер j-го нейрона, в противном случае формируют новый нейрон, веса которого равны компонентам входного вектора, а метка соответствует новому кластеру многомерного пространства признаков.
4. Устройство распознавания типа радиолокационной станции (РЛС) по ее излучению, содержащее последовательно соединенные антенну, радиоприемные устройство, тракт цифровой обработки сигналов (ЦОС), состоящий из последовательно соединенных блока формирования синфазной и квадратурной составляющих радиосигнала (БФК), блока расчета дескриптора импульса (БРД) и блока нейронной сети, выход которой является выходом тракта ЦОС, а вход БФК является первым входом тракта ЦОС и соединен с выходом радиоприемного устройства, и блок принятия решения, отличающийся тем, что в тракт ЦОС дополнительно введены последовательно соединенные блок начального определения количества нейронов первого слоя К (БНО) и блок вычисления весов первого слоя (БВВ) по методу k-средних и грубых множеств, выход которого соединен со вторым входом блока нейросети, а вход БНО является вторым входом тракта ЦОС и входом обучающей выборки устройства распознавания типа РЛС по ее излучению.
| Способ и устройство автоматического распознавания типа манипуляции радиосигналов | 2016 |
|
RU2619717C1 |
| US 5247307 A1, 21.09.1993 | |||
| WO 2006115953 A2, 02.11.2006 | |||
| KR 101311393 B1, 25.09.2013. | |||
