Изобретение относится к машиностроению и может быть использовано в приводах машин и механизмов, в том числе, для бесступенчато регулируемой передачи основной мощности в транспортных средствах, в частности, в автомобилестроении, в мотоциклостроении, при производстве сельскохозяйственной, строительной техники, велосипедов. Импульсные вариаторы (ИВ) обычно включают в свой состав следующие функционально связанные механизмы: генератор механических колебаний (ГМК) с несколькими конечными звеньями, с разнесенными фазами, средство регуляции регулции амплитуды колебаний ГМК, механизмы свободного хода (МСХ), для выпрямления механических колебаний. В описании фаза входного звена ГМК при его вращении считается суммируемой и может превышать 2*ПИ радиан. Движения элементов ИВ, непосредственно связанные с передачей основной мощности от входного звена на выходное, будут называться главными движениями, в отличие, например, от движений, связанных с регулировкой ГМК. Так же в описании будет использоваться понятие планетарного движения, заключающегося во вращении подвижной оси вокруг неподвижной центральной точки и вращении элемента вокруг этой подвижной оси относительно радиус-вектора от центральной точки до точки на подвижной оси. Отсутствие вращения элемента относительно указного радиус-вектора приводит к вырождению планетарного движения до обычного вращения элемента вокруг центральной точки и не может считаться планетарным движением. Частным случаем планетарного движения является вращение элемента вокруг подвижной оси относительно радиус-вектора с той же угловой скоростью, но в обратном направлении, чем вращается подвижная ось относительно центральной точки. В этом случае элемент будет совершать планетарное движение, но элемент будет иметь постоянную ориентацию в инерциальной системе отсчета.
ИВ позволяют получать широкий диапазон регулирования скорости, однако обычно имеют существенный недостаток - для них характерны существенные паразитные колебания мгновенного передаточного отношения (МПО) при фиксированном среднем передаточном отношении (СПО). Фиксация СПО происходит при фиксации амплитуды колебаний ГМК. Для компенсации паразитных колебаний МПО были разработаны конструкции ГМК, которые обеспечивают в период рабочего хода приблизительно постоянное МПО. Среди них известны: механизм R-V-R (А.А. Благонравов. «Механические бесступенчатые передачи нефрикционного типа». М., Машиностроение, 1977, с. 108, рис. 57), кулисные (А.А. Благонравов. «Механические бесступенчатые передачи нефрикционного типа». М., Машиностроение, 1977 с. 108, рис. 58), (А.с. 1260620 СССР, F16H 29/00), кулачковые (В.Ф. Мальцев. «Механические импульсные передачи». М., Машиностроение, 1978, с. 27, рис. 23), (А.с. 1321971 СССР, F16H 29/00), (А.с. 712572 СССР, F16H 29/00). Общим недостатком приведенных аналогов является существенное усложнение конструкции ГМК и неполная компенсация паразитных колебаний МПО.
Известен (SU 1768841 A1, F16H 29/04) ИВ, содержащий включенное в кинематическую цепь главного движения средство передачи вращения с циклически пульсирующим передаточным отношением (пульсатор) и вариаторную часть, выбранный как аналог. Недостатком аналога являются скачки итогового МПО устройства до бесконечности. Это связанно с невозможностью взаимосогласования амплитуд паразитных колебаний МПО вариаторной части и колебаний МПО пульсатора. В свою очередь такая невозможность взаимосогласования колебаний связана с конструктивной особенностью, а именно тем, что при достижении ползуном крайних положений обе шестерни связанные с выходным валом через МСХ и выполняющие роль конечных звеньев ГМК, останавливаются (мертвая точка) и МПО вариаторной части устройства становится бесконечным. Заметим, что мертвая точка исчезает при увеличении количества конечных звеньев ГМК до 3х или более. И только в этом случае возможно взаимосогласование амплитуд паразитных колебаний МПО вариаторной части и колебаний МПО пульсатора.
При этом колебания амплитуды МПО относительно СРО вариаторных частей ИВ с 3х звенными ГМК не превышает 40%, с 4х звенными ГМК - 30%, и далее монотонно убывают.
Известен (А.с. 1414990 СССР, F16H 29/04) ИВ, содержащий пульсатор и вариаторную часть, включающую: ГМК; средство регуляции амплитуды колебаний ГМК; МСХ; причем пульсатор и вариаторная часть характеризуются взаимосогласованностью амплитудных, частотных и фазовых параметров паразитных колебаний передаточного отношения вариаторной части и циклических колебаний передаточного отношения пульсатора с целью уменьшения амплитуды паразитных колебаний передаточного отношения ИВ; выбранный как прототип. Недостатками прототипа являются: пониженный КПД и повышенный износ связанные с проведение всей мощности главного движения через пару зацеплений между некруглыми зубчатыми передачами, выполняющие роль пульсатора, мало того что в зубчатых зацеплениях присутствует трение скольжения, так в зацеплениях некруглых зубчатых колесах трение скольжения усиливается ввиду отклонения формы зубцов от эвольвент (оптимальных с точки зрения потерь на трение); сложностью взаимосогласования конструкций вариаторной части и пульсатора, связанной с необходимостью взаимоувязки элементов вариаторной части и сложных профилей нескольких различающихся некруглых зубчатых колес; сложностью изготовления некруглых зубчатых колес; сложностью компоновки ИВ ввиду значительного размера двухступенчатой зубчатой передачи, и наличия в ней трех валов, требующих закрепления в корпусе, усугубляет ситуацию то, что, как минимум, один из валов несоосен оси вращения кривошипа.
Технический результат изобретения заключается в:
в увеличении КПД и уменьшении износа;
в упрощении изготовления;
в упрощении взаимосогласования конструкций вариаторной части и пульсатора;
в упрощении компоновки ИВ;
В случае использования в ИВ жидкой смазки достигается дополнительный технический результат - упрощение обеспечения чистоты смазки. Это может быть выражено или в упрощении системы очистки смазки и/или увеличении сроков замены масла. Этот результат выполняется как автоматическое следствие уменьшения износа.
Технический результат достигается совокупностью ограничительных признаков, а именно - ИВ, содержащий пульсатор и вариаторную часть, включающую: ГМК; средство регуляции амплитуды колебаний ГМК; МСХ; причем пульсатор и вариаторная часть характеризуются взаимосогласованностью амплитудных, частотных и фазовых параметров паразитных колебаний передаточного отношения вариаторной части и циклических колебаний передаточного отношения пульсатора с целью уменьшения амплитуды паразитных колебаний передаточного отношения ИВ; и отличительных признаков, а именно - в составе пульсатора два вращательных звена главного движения (ВЗГД) одно ведущее, другое ведомое зацеплены через кулачек, причем такой кулачек жестко установлен: на сателлит зубчато-кулачкового планетарного механизма; или на параллелограммный механизм, одной стороной которого является ВЗГД.
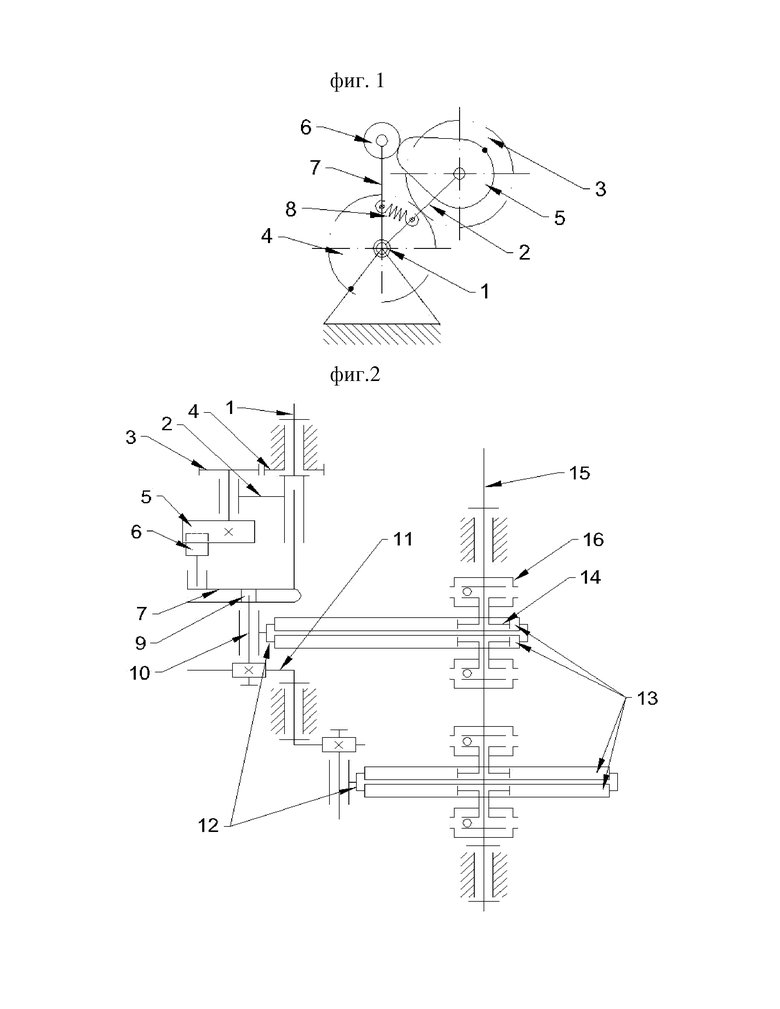
На фиг. 1 показана схема пульсатора с кулачком на сателлите, условный вид с торца.
На фиг. 2 показана схема ИВ с пульсатором с кулачком на сателлите, условный вид сверху.
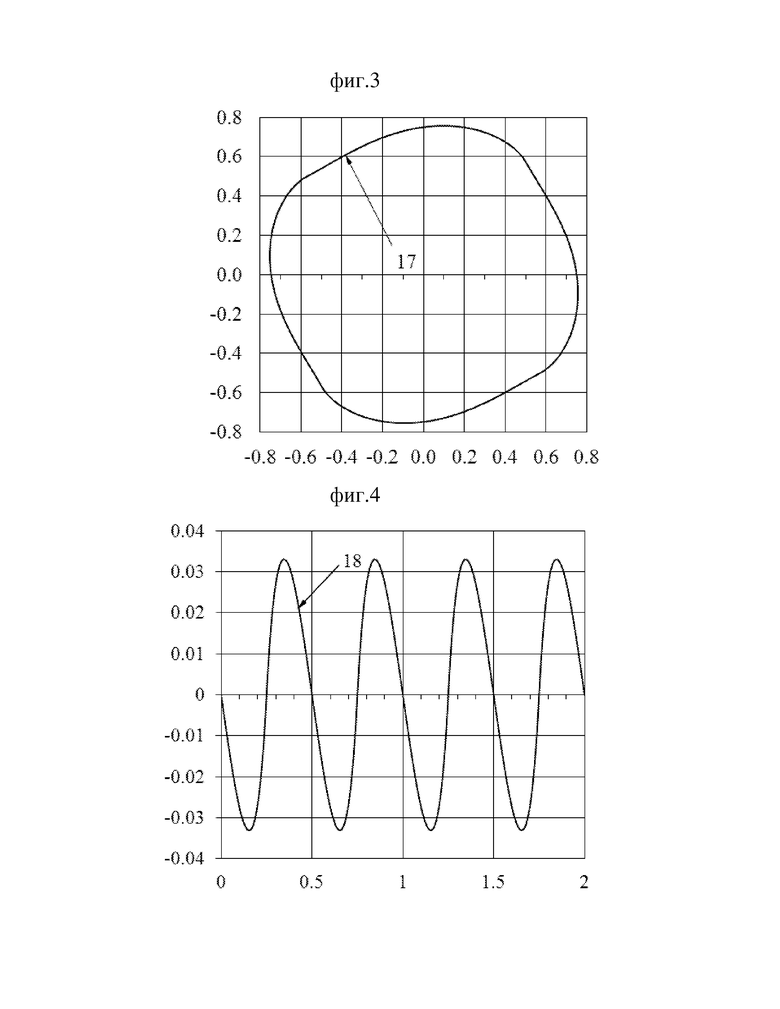
На фиг. 3 показан профиль кулачка.
На фиг. 4 показана кривая, обеспечиваемых движением кулачка колебаний ведомого ВЗГД, относительно среднего угла между ведущим и ведомым ВЗГД (по оси ординат в радианах), в зависимости от угла поворота ведущего ВЗГД (по оси абсцисс в единицах π).
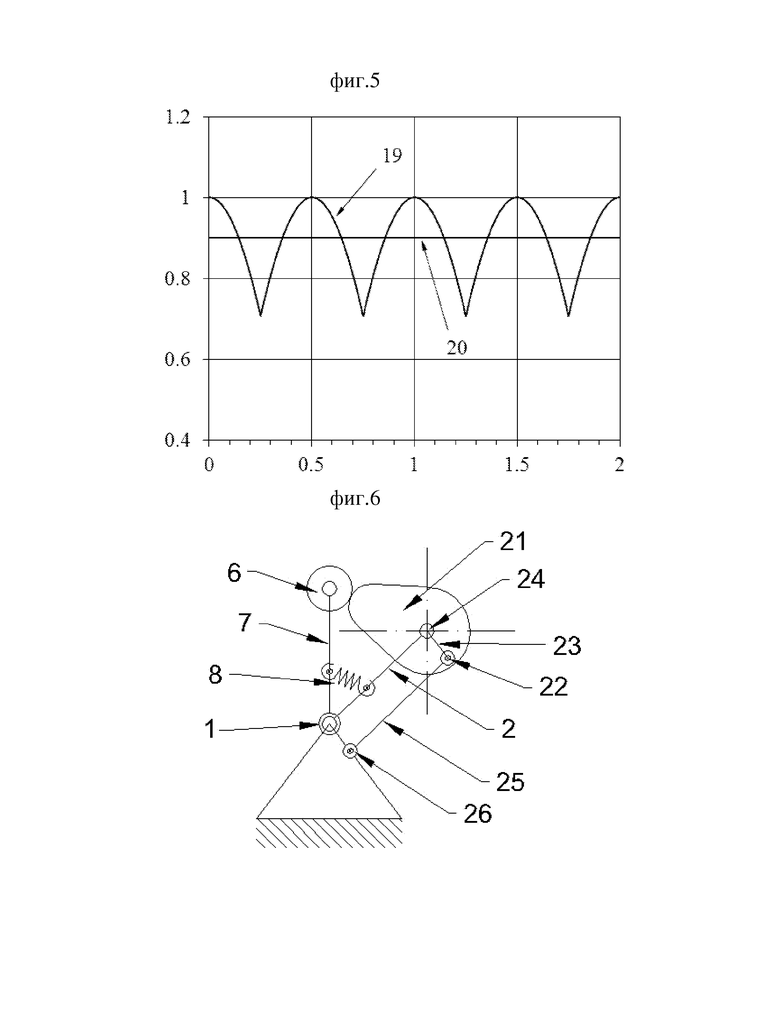
На фиг. 5 показана кривая зависимости МПО вариаторной части ИВ (без пульсатора), от угла поворота входного звена вариаторной части и линия СПО ИВ, где по оси абсцисс отложен угол поворота входного звена вариаторной части в единицах π.
На фиг. 6 показана схема пульсатора с кулачком на параллелограммном механизме, условный вид с торца.
Пример 1 (фиг. 1, фиг. 2) реализации ИВ, включающего пульсатор с кулачком на сателлите и включающего кривошип-шатунные механизмы: ИВ содержит первичный вал 1 с укрепленным на нем ведущим ВЗГД 2. На ведущее ВЗГД через подшипник установлен сателлит 3, зацепленный зубцами за неподвижную шестерню 4, установленную соосно первичному валу и имеющей равное с сателлитом количество зубцов. На сателлите неподвижно установлен кулачек 5, упирающийся в ролик 6, который через подшипник установлен на ведомое ВЗГД 7. Расстояния от оси вращения сателлита и оси вращения ролика до оси вращения первичного вала равны. Пружина 8 осуществляет силовое замыкание кулачка и ролика. Ведущее и ведомое ВЗГД, неподвижная шестерня, сателлит с кулачком, ролик и замыкающая пружина составляют пульсатор. На ведомом ВЗГД, выполняющем роль входного звена вариаторной части, выполнен радиальный паз, в который вставлен ползун 9 пальца 10 двойного кривошипа 11. Средство согласованной регуляции длины плеч двойного кривошипа выполнено как в прототипе. Плечи двойного кривошипа разнесены на 90 градусов. Каждый палец двойного кривошипа зацеплен со своим шатуном 12. На каждом шатуне вырезаны или установлены зубчатые рейки 13 одна сверху и одна снизу, направленные, в проекции перпендикулярной валу, соединяющему кривошипы (кривошипный вал), друг к другу. Каждая зубчатая рейка сцеплена со своей шестерней 14, которые являются конечными звеньями ГМК. Шестерни соединены с вторичным валом 15 через обгонные муфты 16, выполняющие роль МСХ. Все обгонные муфты настроены на передачу вращательного движения от шестерней на вторичный вал в направлении, соответствующем движению кулачка в сторону ролика. При подаче вращения на первичный вал с направлением, соответствующем движению кулачка в сторону ролика, кулачек давит на ролик и вращает ведомое ВЗГД, при этом кулачок и сателлит вращаются относительно ведущего ВЗГД с частотой равной частоте вращения первичного вала, тем самым задавая ведомому ВЗГД пульсирующее вращение. Ведомое ВЗГД передает вращение на двойной кривошип. Пальцы двойного кривошипа приводят в движение шатуны. Шатуны через зубчатые рейки приводят в колебательное движение шестерни, которые приводят в движение вторичный вал через обгонные муфты. Расстояние между кривошипным валом и вторичным валом; диапазон регулирования плеч кривошипов; радиус шестерней зацепленных с зубчатыми рейками; профиль кулачка; подобраны таким образом, что бы для одного выбранного передаточного отношения паразитные колебания передаточного отношения ИВ отсутствовали. Для прочих передаточных отношений паразитные колебания будут только ослаблены. Все вращательные пары связаны через подшипники качения.
В данном примере ИВ продемонстрировано достижение технических результатов:
увеличение КПД и уменьшение износа - так как пульсатор содержит только круглые зубчатые колеса, форма которых оптимальна для минимизации потерь на трение, кроме того, так как ведущее ВЗГД давит на ведомое ВЗГД вне зависимости от вращения кулачка, то только часть вращения передается на ведомое ВЗГД через вращение кулачка, а значит, только часть основной мощности проводится через шестерни пульсатора (расчеты показывают, что через шестерни проводится не более 30% мощности главного движения), а значит, меньше мощности теряется в зубчатой передаче, что дополнительно увеличивает КПД и уменьшает износ;
упрощение взаимосогласования конструкций вариаторной части и пульсатора - связанное с тем, что при взаимосогласовании конструкций вариаторной части и пульсатора из всех параметров согласования сложным нестандартным параметром, является только профиль кулачка, остальные элементы вариаторной части и пульсатора или стандартные (круглые шестерни) или простые (расстояния между первичным и вторичным валами, диаметр шестерней конечных звеньев ГМК, диапазон изменения плечей двойного кривошипа), в то время как в прототипе сложными параметрами являются различающиеся профили нескольких некруглых зубатых колес, профили которых существенно сложнее профиля кулачка; упрощение изготовления - изготовить кулачок проще, чем несколько некруглых зубчатых колес, сложность остальных деталей существенно ниже; упрощение компоновки ИВ - так как мощность проводимая через шестерни пульсатора меньше мощности проводимой через некруглые зубчатые колеса в прототипе, то для ИВ достаточны шестерни меньших размеров, что уменьшает размер пульсатора относительно прототипа, тем самым уменьшает общие габариты ИВ, кроме того пульсатор, в отличии от прототипа, расположен соосно кривошипному валу (что в, частности, заведомо позволяет выполнить пульсатор в габаритах вариаторной части в проекции перпендикулярной кривошипному валу), так же пульсатор использует меньшее количество валов, требующих крепления в корпусе, что в совокупности обеспечивает упрощение компоновки ИВ. При этом критерии оптимизации компоновки могут быть обусловлены оптимизацией сопряжения узлов внутри ИВ, упрощением изготовления ИВ, уменьшением стоимости изготовления ИВ, оптимизацией сопряжения ИВ с другими механизмами и другими факторами. И, в общем случае, чем меньше сами узлы, тем проще их скомпоновать под различные критерии.
Пример 2. (фиг. 1, фиг. 2, фиг. 3, фиг. 4, фиг. 5) реализации ИВ, включающего пульсатор с кулачком на сателлите и включающего шотландские механизмы. Более интересной конструкцией является измененный ИВ включающий пульсатор с кулачком на сателлите и включающего кривошип-шатунные механизмы из примера 1, в котором шатуны заменены на возвратно-поступательные ползуны, зацепленные с кривошипами как в шотландском механизме. Такая конструкция позволяет избавиться от паразитных колебаний для всех штатных передаточных отношений ИВ. Кулачок выполнен с профилем 17 (размеры проставлены в долях расстояния между осями вращения ведущего ВЗГД и кулачка, радиус ролика, равен 0.2 в тех же относительных единицах) который обеспечивает колебание угла между ведомым и ведущем ВЗГД ϕ2 относительно начального значения при изменении угла поворота первичного вала ϕ1 по формуле:
ϕ2=arcsin(K*(ϕ1-π/2*int(2*ϕ1/π+0.5)))+π/2*int(2*ϕ1/π+0.5)-ϕ1;
где K=2*2^0.5/π≈0.90;
ϕ1 - угол поворота первичного вала;
ϕ2 - угол между ведомым и ведущем ВЗГД;
а функция int(x) возвращает целое значение аргумента;
при этом угол ϕ1 отсчитывается от положения первичного вала, которому соответствует верхнее вертикальное положение ролика на ведомом ВЗГД. Согласно кривой зависимости колебания ϕ2 от ϕ1 18 амплитуда таких колебаний не превышает 0.07 радиан.
С учетом вращения кулачка вокруг оси первичного вала, угол поворота ведомого ВЗГД ϕ3 (отсчитывая от верхнего вертикального положения ролика) изменяется по формуле:
ϕ3=arcsin(K*(ϕ1-π/2*int(2*ϕ1/π+0.5)))+π/2*int(2*ϕ1/π+0.5);
Для вариаторной части зависимость угла поворота вторичного вала ϕ4 от угла поворота ведомого ВЗГД определяется как:
ϕ4=R2/R3*(sin(ϕ3-π/2*int(2*ϕ3/π+0.5))+π/2*K*int(2*ϕ3/π+0.5));
где R2 длина плеч двойного кривошипа;
R3 радиус делительных окружностей шестерней;
А значит, зависимость МПО вариаторной части от угла поворота ведомого ВЗГД выражается как:
МПО=R3/R2/cos(ϕ3-π/2*int(2*ϕ3/π+0.5))
Эта зависимость показана кривой 19, причем на графике по оси абсцисс отложен ϕ3 в единицах π, а по оси ординат МПО вариаторной части (в долях отношения R2/R3). СПО ИВ (в долях отношения R2/R3) показано линией 20. Подставляя зависимость ϕ3 от ϕ1 получаем, что:
ϕ4=R2/R3*K*ϕ1;
Из чего следует, что при постоянном R2, то есть при постоянной амплитуде колебаний ГМК, итоговое передаточное отношение ИВ постоянно. Таким образом, в данном примере устранены паразитные колебания для всех штатных передаточных отношений ИВ.
Максимальная дополнительная угловая скорость, придаваемая ведомому ВЗГД за счет вращения кулачка вокруг подвижной оси, не превышает 28% от скорости вращения первичного вала. Это означает, что мощность, передаваемая через зубчатое зацепление пульсаторы не превышает 28% от мощности главного движения, проходящей через ИВ (это значение является максимальной долей для ГМК с четырьмя конечными звеньями). В данном примере ИВ достигаются те же технические результаты, что и для ИВ, включающего пульсатор с кулачком на сателлите и включающего кривошип-шатунные механизмы из примера 1, на тех же основаниях.
Для уменьшения габаритов сателлита или для уменьшения скорости вращения сателлита, сателлит и неподвижная шестерня могут быть выполнены с неравным количеством зубцов. При этом должно соблюдаться отношение - угол поворота ведущего ВЗГД, за который сателлит совершает полный оборот относительно своего опорного элемента, должен быть равен или кратен углу поворота ведомого ВЗГД за который МПО вариаторной части совершает однократное полное паразитное колебание.
Пример 3 реализации пульсатора ИВ на параллелограммном механизме: кулачек 21 неподвижно насажен на первую шейку 22 кулачкового кривошипа 23, вторая шейка 24 кулачкового кривошипа установлена на ведущее ВЗГД с возможностью вращения. К первой шейке кулачкового кривошипа прикреплено коромысло 25 с возможностью вращения, другой конец коромысла прикреплен с возможностью вращения к неподвижному пальцу 26. Причем плечо кулачкового кривошипа равно расстоянию от центральной оси (оси первичного вала) до неподвижного пальца. А длина коромысла равна расстоянию от центральной оси до центра второй шейки кулачкового кривошипа. Таким образом, кулачковый кривошип, коромысло, ведущее ВЗГД и неподвижный палец составляют параллелограммный механизм, обеспечивающий постоянную ориентацию кулачкового кривошипа и кулачка, вне зависимости от угла поворота ведущего ВЗГД. Все вращающиеся пары соединены через подшипники качения. При подаче вращения на ведущее ВЗГД через первичный вал, кулачковый кривошип с кулачком начинает совершать планетарное движение относительно центральной оси. А, так как кулачек не меняет ориентацию, то ролик обкатывается вокруг кулачка полностью за один оборот первичного вала. Кулачек на кривошипе профилирован для задания того же закона колебания ведомого ВЗГД относительно ведущего ВЗГД, которое задает кулачек, насаженный на сателлит в примере 1. Для увеличения стабильности движения кулачка, он может быть установлен одновременно на двух или более параллелограммных механизмах.
В данном примере ИВ продемонстрировано достижение технических результатов:
увеличение КПД и уменьшение износа - так как пульсатор не содержит зубчатых колес, а значит, избавлен от трения скольжения; упрощение взаимосогласования конструкций вариаторной части и пульсатора - которое связано с тем, что при взаимосогласовании конструкций вариаторной части и пульсатора из всех параметров согласования сложным нестандартным параметром, является только профиль кулачка, остальные элементы вариаторной части и пульсатора или стандартные (круглые шестерни) или простые, в то время как в прототипе существенно более сложными параметрами являются различающиеся профили нескольких некруглых зубатых колес;
упрощение компоновки ИВ - так как в пульсаторе отсутствую шестерни, то уменьшается требуемый размер пульсатора относительно прототипа, тем самым уменьшает общие габариты ИВ, кроме того пульсатор, расположен соосно кривошипному валу, так же пульсатор использует меньшее количество валов, требующих крепления в корпусе.
В частных случаях реализации ИВ (для всех приведенных примеров) могут достигаться дополнительные технические результаты. Для уменьшения габаритов пульсатора и уменьшения контактного давления на каждый кулачек пульсатор может включать два или более одинаковых кулачка, через которые передается главное движение. С целью увеличения площади контакта кулачка и ролика и уменьшения давления в области контакта один из этой пары элементов может быть выполнен частично полым, а другой элемент пары вставлен в эту полость, то есть элементы будут контактировать один поверхностью внутреннего радиуса, а другой поверхностью внешнего радиуса. В различных вариантах исполнения кулачек пульсатора может быть ведущим или ведомым по отношению к вращательному звену, на который он установлен. Для увеличения частоты работы пульсатора и избавления от пружины ролик может быть вставлен в фигурный паз кулачка.
Для автоматизации подстройки передаточного отношения ИВ к параметрам внешнего привода и/или внешней нагрузки средство регуляции амплитуды колебаний ГМК может быть выполнено автоматическим. Примером автоматической регулировки может служить конструкция В.Ф. Мальцев. «Механические импульсные передачи». М., Машиностроение, 1978 стр. 124 рис 11 или в А.С. SU 155373. Средство автоматической регулировки так же может быть выполнено, как на основе механического привода, так и на основе гидравлического, пневматического, электромагнитного приводов или их комбинации. Так же средство автоматической регулировки может содержать блок электронного управления. Для уменьшения дисбаланса, в ИВ может быть вставлено средство балансировки: для балансировки кривошипа, например, грузик с регулируемым радиусом его вращения, как в RU 2185897; для балансировки возвратно-поступательного ползуна, например грузик с оппозитным движением, приводимым от возвратно-поступательного ползуна через шестерню, установленную в корпусе, по известной схеме балансировки затворной группы в автомате AEK-971 (ru.wikipedia.org/wiki/%C0%C5%CA-971);
Для повышения максимальной частоты работы ИВ обгонные муфты могут быть заменены на управляемые фрикционные муфты с принудительным приводом управления их замыкания и/или размыкания от первичного вала: механическим (например, кулачковый механизм замыкания фрикционной муфты в RU 2297565 или другие замыкающие или размыкающие кулачково-рычажные или кулачково-толкательные механизмы), или гидравлическим, или пневматическим, или электромагнитным, или комбинацией указанных приводов. При этом управляющие кулачки могут крепиться на кривошип или входной вал или на специальный управляющий вал, вращающийся синхронно кривошипу или первичному валу с периодом обращения равным или кратным периоду вращения первичного вала. Фрикционные муфты могут быть выполнены с одной или несколькими фрикционными парами, характеризуемыми мокрым или сухим трением.
Заметим, что ИВ с МСХ, в виде фрикционных муфт с принудительным приводом, обладают свойством обратимости, то есть ИВ может передавать вращение от вторичного вала на первичный вал.
| название | год | авторы | номер документа |
|---|---|---|---|
| Импульсная изменяемая передача вращения | 2016 |
|
RU2629765C2 |
| Импульсный вариатор | 2016 |
|
RU2617227C2 |
| Реечный импульсный вариатор с одновальным выпрямителем | 2016 |
|
RU2617245C2 |
| ДЕСМОДРОМНЫЙ КУЛАЧКОВЫЙ ПРИВОД КЛАПАНА ГАЗОРАСПРЕДЕЛИТЕЛЬНОГО МЕХАНИЗМА С РЕГУЛИРОВКОЙ СТЕПЕНИ ОТКРЫТИЯ КЛАПАНА | 2020 |
|
RU2730196C1 |
| ДВУНАПРАВЛЕННЫЙ ГИДРОКОМПЕНСАТОР ЗАЗОРОВ ДЕСМОДРОМНОГО ПРИВОДА | 2020 |
|
RU2730187C1 |
| ВЫСОКОМОМЕНТНЫЙ ВАРИАТОР | 2000 |
|
RU2179673C1 |
| ВАРИАТОРНЫЙ ПРИВОД МОБИЛЬНОЙ МАШИНЫ | 2002 |
|
RU2205110C1 |
| ТРАНСПОРТНОЕ СРЕДСТВО С МУСКУЛЬНЫМ ДВИГАТЕЛЕМ | 1992 |
|
RU2033367C1 |
| ЗУБЧАТАЯ ВАРИАТОРНАЯ КОРОБКА ПЕРЕДАЧ | 2013 |
|
RU2549341C2 |
| Автоматическая передача Б.Кочеткова | 1989 |
|
SU1709152A1 |
Изобретение относится к бесступенчато регулируемым передачам в транспортных средствах, в частности в автомобилестроении, в мотоциклостроении, при производстве сельскохозяйственной, строительной техники, велосипедов. Импульсный вариатор содержит включенное в кинематическую цепь главного движения средство передачи вращения с циклически пульсирующим передаточным отношением - пульсатор и вариаторную часть, включающую генератор механических колебаний (ГМК), средство регуляции амплитуды колебаний ГМК, механизмы свободного хода (МСХ). В составе пульсатора два вращательных звена главного движения (ВЗГД) - одно ведущее, другое ведомое - зацеплены через кулачок, причем такой кулачок жестко установлен на сателлит зубчато-кулачкового планетарного механизма или на параллелограммный механизм, одной стороной которого является ВЗГД. Достигается увеличение КПД, уменьшение износа. 8 з.п. ф-лы, 6 ил.
1. Импульсный вариатор (ИВ), содержащий включенное в кинематическую цепь главного движения средство передачи вращения с циклически пульсирующим передаточным отношением - пульсатор и вариаторную часть, включающую: генератор механических колебаний (ГМК); средство регуляции амплитуды колебаний ГМК; механизмы свободного хода (МСХ); причем пульсатор и вариаторная часть характеризуются взаимосогласованностью амплитудных, частотных и фазовых параметров паразитных колебаний передаточного отношения вариаторной части и циклических колебаний передаточного отношения пульсатора с целью уменьшения амплитуды паразитных колебаний передаточного отношения ИВ, отличающийся тем, что в составе пульсатора два вращательных звена главного движения (ВЗГД) одно ведущее, другое ведомое зацеплены через кулачек, причем такой кулачек жестко установлен: на сателлит зубчато-кулачкового планетарного механизма; или на параллелограммный механизм, одной стороной которого является ВЗГД.
2. Устройство по п.1, отличающееся тем, что характеризуется постоянным передаточным отношением - отсутствием паразитных колебаний для всех штатных передаточных отношений ИВ.
3. Устройство по п.1, отличающееся тем, что пульсатор характеризуется возможностью зацепления между ведущим и ведомым ВЗГД, для передачи вращения через два или более кулачка.
4. Устройство по п.1, отличающееся тем, что кулачок и ролик контактируют между собой один поверхностью внутреннего радиуса, а другой поверхностью внешнего радиуса или оба контактируют поверхностью внешнего радиуса.
5. Устройство по п.1, отличающееся тем, что ВЗГД, на котором установлен кулачек, выполнено ведущим или ведомым по отношению к кулачку.
6. Устройство по п.1, отличающееся тем, что ролик вставлен в фигурный паз кулачка.
7. Устройство по п.1, отличающееся тем, что имеет заданную пульсацию передаточного отношения.
8. Устройство по п.1, отличающееся тем, что содержит механический, или гидравлический, или пневматический, или электромагнитный привод, или комбинацию указанных приводов принудительного управления МСХ, характеризуемый возможностью переключения режимов работы МСХ синхронизированного с фазой вращения входного звена ИВ.
9. Устройство по п.8, отличающееся тем, что характеризуется обратимостью по передаче вращения от первичного вала на вторичный вал и наоборот.
| Вариатор скорости | 1985 |
|
SU1260620A1 |
| Импульсный вариатор | 1982 |
|
SU1036997A1 |
| КУЛАЧКОВЫЙ ИМПУЛЬСНЫЙ ВАРИАТОР | 2007 |
|
RU2352840C1 |
| СПОСОБ ИЗМЕРЕНИЯ ДЕФОРМАЦИИ ДВИЖУЩЕЙСЯ МАГНИТНОЙ ЛЕНТЫ | 1971 |
|
SU426136A1 |

