Импульсная изменяемая передача вращения (далее ИИПВ). Изобретение относится к машиностроению и может быть использовано в приводах машин и механизмов, в том числе, для бесступенчатой (вариаторной) или многоступенчатой регулируемой передачи основной мощности в транспортных средствах, в частности в автомобилестроении, включая производство грузовиков, в мотоциклостроении, при производстве сельскохозяйственной и строительной техники, при производстве приводов основной мощности судов, велосипедов. Движения элементов ИИПВ, непосредственно связанные с передачей основной мощности от входного звена на выходное, будут называться главными движениями, в отличие, например, от движений, связанных с регулировкой передаточного отношения. Кинематическая цепь главного движения ИИПВ обычно включает в себя один или несколько механизмов свободного хода (МСХ), преобразующих колебательные движения во вращательное движение или наоборот. В описании будут использоваться понятия: качательный элемент – означающее, что элемент установлен с возможностью совершения возвратно-качательного движения, как подвида колебательного движения; вращательный элемент – означающее, что элемент установлен с возможностью совершения вращательного движения. Включенное в кинематическую цепь главного движения средство передачи вращения с циклически изменяемым передаточным отношением, но постоянным средним передаточным отношением в описании будет назваться пульсатором. В графиках скоростей поворота/вращения, скорость будет откладываться по оси ординат в условных единицах, причем все такие графики будут подразумевать работу ИИПВ при фиксированной амплитуде качаний качательных элементов.
Известна (А.с. 1414990 СССР, F16H 29/04) ИИПВ, содержащая в кинематической цепи передачи главного движения более двух МСХ, каждый из которых выполнен связывающим соосно установленные элементы: качательный элемент и соответствующий качательному элементу вращательный элемент; выбранная как прототип. Для прототипа характерны недостатки: повышенный износ МСХ и уменьшенный ресурс ИИПВ; повышенный нагрев МСХ; повышенные требования к материалам изготовления МСХ и их обработке; повышенные требования к скорости переключения МСХ; пониженный КПД ИИПВ; неравномерность передачи мощности ИИПВ; повышенные требования к системе охлаждения МСХ; ограничение на частоту движения качательных элементов; ограничение на использовании МСХ на основе нефрикционного зацепления, в том числе храповых механизмов.
Недостатки связаны с конструктивной особенностью кинематической схемы прототипа, а именно – с большим угловым относительным ускорением между качательным элементом и соответствующим ему вращательным элементом в период замыкания МСХ связывающего указанные элементы. Рассмотрим вариаторную часть прототипа без пульсатора. При вращении кривошипов, каждая зацепленная за рейку шестерня (25) (далее ЗРШ), выполняющая роль качательного элемента, за один оборот кривошипа поворачивается, при передаче главного движения (когда связанный с ней МСХ замкнут), на угол
ϕ1=2* R1/R2*sin(π/N),
где:
ϕ1 - угол поворота ЗРШ, при передаче через нее главного движения;
R1 - плечо кривошипа;
R2- делительный радиус ЗРШ;
π – число Пи;
N – количество МСХ в передаче главного движения (в прототипе равно 4).
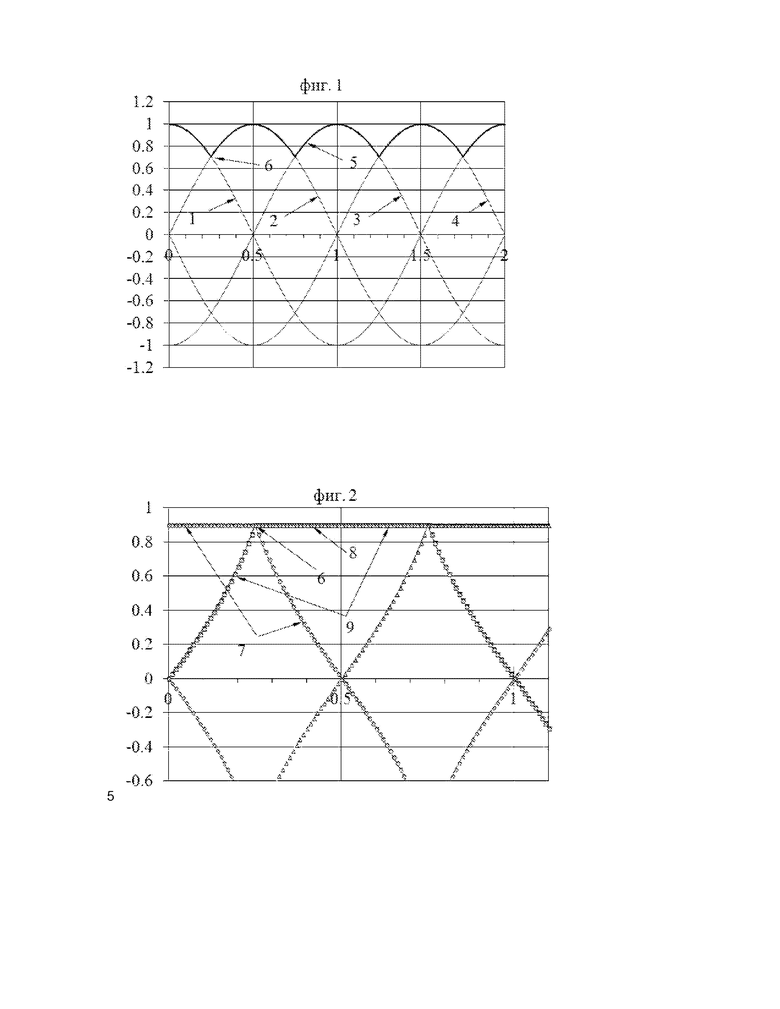
При этом кривая скорости поворота ЗРШ в зависимости от фазы поворота одного из кривошипов на графике будет иметь вид синусоиды 1. Кривые движения остальных ЗРШ являются такими же синусоидами, но смещенными на фазу, кратную 90 градусам (кривые 2, 3, 4). Средняя скорость поворота ЗРШ за период, когда связанная с ней МСХ замкнута, равна
ωa = 2*R1/R2*N*ϑ*sin(π/N),
где:
ωa - средняя скорость поворота качательного элемента за период передачи им главного движения, то есть в период, когда МСХ, связанная с данным качательным элементом замкнута;
ϑ – частота колебаний качательного элемента.
Заметим, что ωa совпадает со скоростью вращения промежуточного и выходного вала прототипа, которые выполняют роли вращательных элементов, соответствующих качательным элементам. Кривая скорости вращения выходного вала 5 в прототипе без пульсатора является огибающей синусоид 1,2,3,4. В момент 6 переключения двух МСХ (одна обгонная муфта размыкается, другая замыкается) и после ЗРШ движется с замедлением, а соответствующий ей вращательный элемент ускоряется, так как приводится уже другой ЗРШ. Таким образом, относительное ускорение между ЗРШ и выходным валом составляет
ω’ = 4*R1/R2* π2 *ϑ2 *sin(π/N);
где
ω’ – модуль относительного ускорения в прототипе между качательным элементом и соответствующим ему вращательным элементом в момент переключения МСХ их связывающих. Он же равен ускорению между обоймами обгонной муфты прототипа, в период переключения ее состояния;
или иначе:
ω’ = 2*π2 *ϑ * ωa/N;
(далее - формула относительного ускорения), указанная величина является минимальным ускорением относительного поворота между качательным элементом и соответствующим ему вращательным элементом в момент переключения МСХ в прототипе без пульсатора. Коррекция вращения с помощью пульсатора увеличивает скорость поворота обоих указанных элементов ориентировочно на 27%, а значит увеличивает их ускорение относительного поворота в момент переключения МСХ. Указанная формула относительного ускорения характеризует для всех предшествующих ИИПВ минимальное значение модуля относительного ускорения, которое достигается хотя бы одной парой главного движения состоящей из качательного элемента и соответствующего ему вращательного элемента в период переключения режима МСХ связывающего указанную пару, при любой штатной фиксированной амплитуде колебаний качательного элемента. Формула относительного ускорения показывает, что относительное ускорение возрастает от частоты колебаний качательного элемента по квадратичному закону и, при требуемых для транспорта частотах, ставится весьма значительным. С другой стороны все МСХ имеют конечное время переключения - замыкания и размыкания, и за время переключения режима МСХ качательный элемент и соответствующий ему вращательный элемент из-за большого относительного ускорения в момент переключения оказываются в подключенном состоянии через МСХ с ненулевой паразитной относительной угловой скоростью (ПОУС), которая гасится в МСХ. Для прототипа с пульсатором это выглядит так. До прохождения момента переключения двух МСХ первая ЗРШ, со скоростной кривой 7 связана с выходным валом через свою замкнутую обгонную муфту, и вращается с угловой скоростью равной угловой скорости выходного вала 8. Обгонная муфта второй ЗРШ со скоростной кривой 9 разомкнута. Сразу после прохождения момента переключения двух МСХ угловая скорость поворота первой ЗРШ падает, а значит, падает скорость вращения выходного вала. Скорость поворота второй ЗРШ начинает превышать скорость вращения выходного вала, а значит, распирающие элементы обгонной муфты связанной со второй ЗРШ начинают поворачиваться к замкнутому положению. Для полного замыкания указанной обгонной муфты требуется угловой поворот между обоймами обгонной муфты ϕ2 . Причем модуль ускорения между второй ЗРШ и соответствующей ей вращательным элементом не меньше, чем ω’ = 2*π2 *ϑ * ωa/N. Согласно известному из школьной программы соотношению между пройденным путем, ускорением и скоростью, к моменту полного замыкания указанной обгонной муфты ПОУС составит для прототипа -
ПОУС = (2* ω’* ϕ2)0.5
где:
ϕ2 - угловой поворот между обоймами обгонной муфты, требуемый для ее замыкания.
Таким образом, чем больше относительное ускорение между соответствующими друг другу качательным и вращательным элементами в момент переключения обгонной муфты, тем больше ПОУС. Эта ПОУС погашается в обгонной муфте, с выделением тепловой энергии. Данный эффект характерен для всех ИИПВ с качательными элементами (например В.Ф.Мальцев. «Механические импульсные передачи». М., Машиностроение, 1978 стр. 26 рис. 21), а не только для реечных ИИПВ, и приводит к: повышенному износу МСХ и уменьшенному ресурсу ИИПВ; повышенному нагреву МСХ; повышенным требованиям к материалам изготовления МСХ и их обработке; повышенные требования к скорости переключения МСХ; понижению КПД прототипа, из-за потерь энергии связанных с переводом ПОУС в тепло; неравномерности передачи мощности ИИПВ, которая связана с тем, что когда в прототип набирает указанную ПОУС, в этот момент он использует подводимую к нему мощность полностью или частично на набор ПОУС, а не на передачу этой части мощности потребителю; ограничению на частоту колебаний качательных элементов для предотвращения разрушения МСХ; повышению требований к системе охлаждения МСХ; ограничению на использовании МСХ на основе нефрикционного зацепления, в том числе храпового механизма, так как при погашении ПОУС в таких МСХ возникают ударные нагрузки, которые быстро разрушают МСХ.
Технической задачей изобретения является достижение технических результатов: улучшения условий работы МСХ; уменьшения износа МСХ и увеличение ресурса ИИПВ; уменьшения нагрева МСХ; понижения требований к материалам изготовления МСХ и их обработке; понижения требований к скорости переключения МСХ; увеличения КПД ИИПВ; выравнивания передачи мощности ИИПВ; уменьшения требований к системе охлаждения МСХ; повышения допустимой частоты движения качательных элементов.
Дополнительные технические результаты, достигаемые в конкретных вариантах исполнения: снятие ограничения на использовании МСХ на основе нефрикционного зацепления, в том числе храповых механизмов; уменьшение размеров МСХ; увеличение передаваемого крутящего момента; устранение трения скольжения в МСХ.
Технические результаты достигаются совокупностью: ограничительных признаков, а именно – ИИПВ, содержащая в кинематической цепи передачи главного движения более двух МСХ, каждый из которых выполнен связывающим соосно установленные элементы: качательный элемент и соответствующий качательному элементу вращательный элемент; и отличительных признаков – кинематическая схема ИИПВ характеризуется, при любой штатной фиксированной амплитуде колебаний качательных элементов, для любого МСХ главного движения в период его замыкания и в период его размыкания, относительным угловым ускорением между качательным элементом и вращательным элементом, соединенными через указанный МСХ, не превышающим величины
0.4*π2 *ϑ * ωa/N.
Действительно, все ранее указанные недостатки прототипа связаны с большим относительным ускорением между соосными качательным и вращательным элементами, связанными через МСХ в период замыкания МСХ. Уменьшение относительного ускорения между ними, в указанный период, уменьшает проявление всех недостатков, а значит улучшает условия работы МСХ.
На фиг. 1 изображен график скоростей поворота качательного элемента и вращения выходного вала прототипа без пульсатора, в зависимости фазы вращения одного из кривошипов, отложенной по оси абсцисс в единицах π.
На фиг. 2 изображен график скоростей поворота качательного элемента и вращения выходного вала прототипа с пульсатором, в зависимости от фазы вращения входного вала, отложенной по оси абсцисс в единицах π.
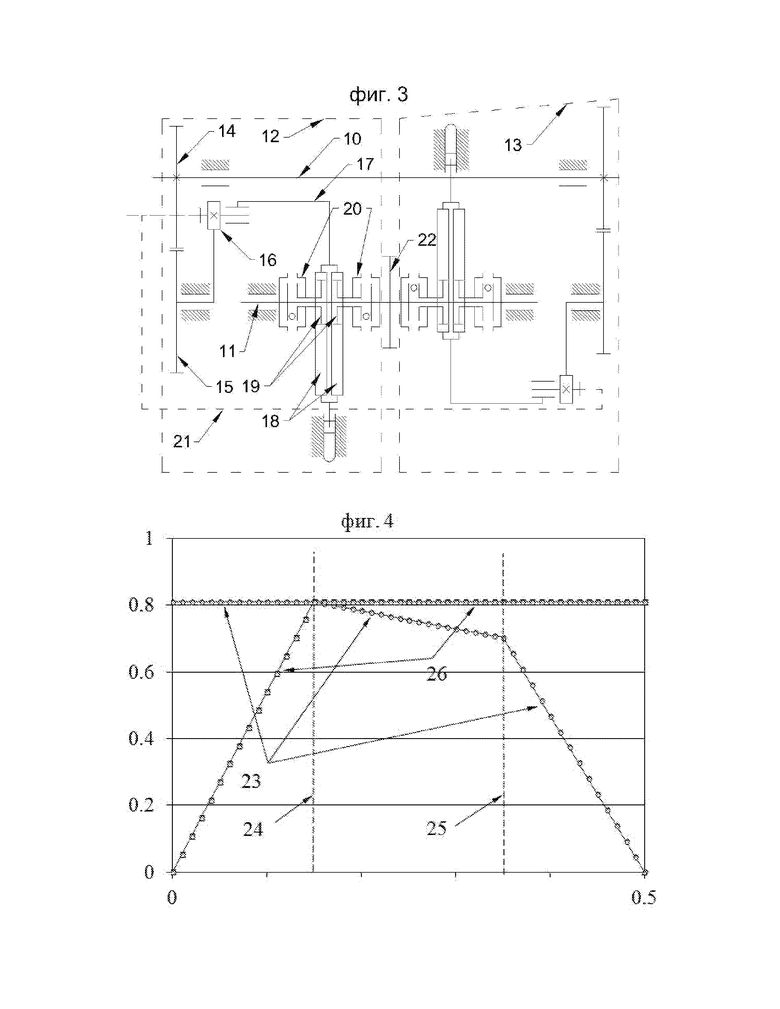
На фиг. 3 изображена кинематическая схема вариаторной ИИПВ (ВИИПВ) на кривошипах и четырех МСХ.
На фиг. 4 изображен график скоростей поворота качательных элементов ВИИПВ на кривошипах и четырех МСХ, с небольшим замедлением каждого качательного элемента в период размыкания связанной с ним МСХ, в зависимости фазы вращения первичного вала, отложенной по оси абсцисс в единицах π.
На фиг. 5 изображена кинематическая схема ВИИПВ на эксцентриках и четырех МСХ.
На фиг. 6 изображена кинематическая схема ВИИПВ с кулачково-планетарными пульсаторами.
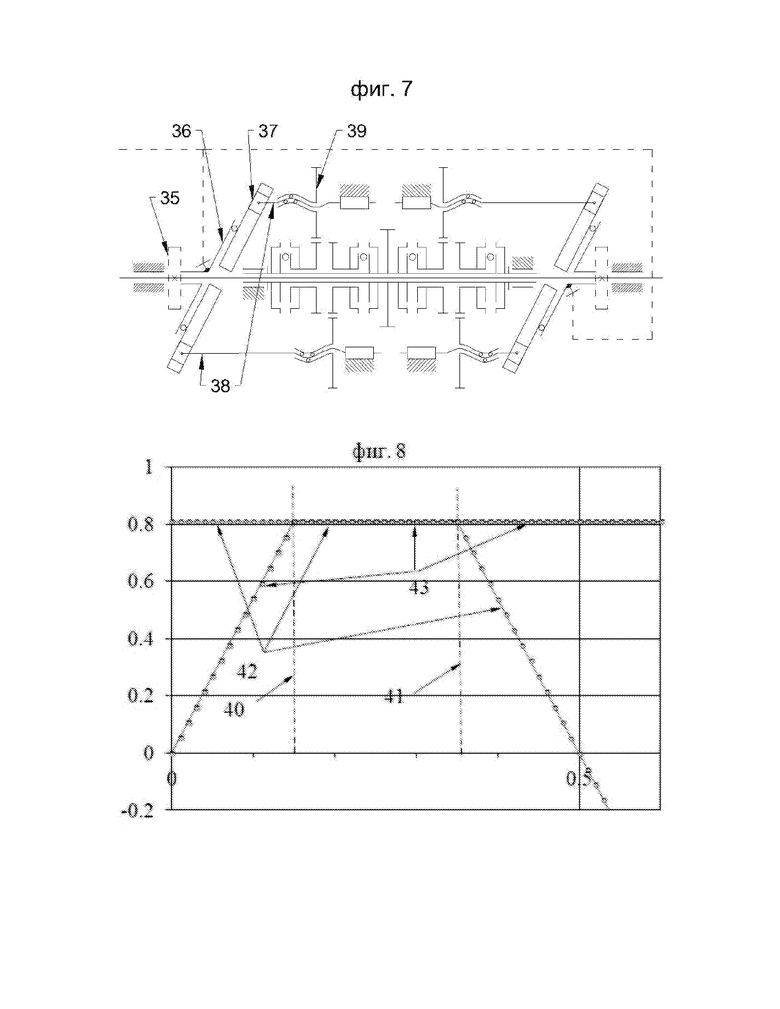
На фиг. 7 изображена кинематическая схема ВИИПВ на наклонных шайбах и четырех МСХ.
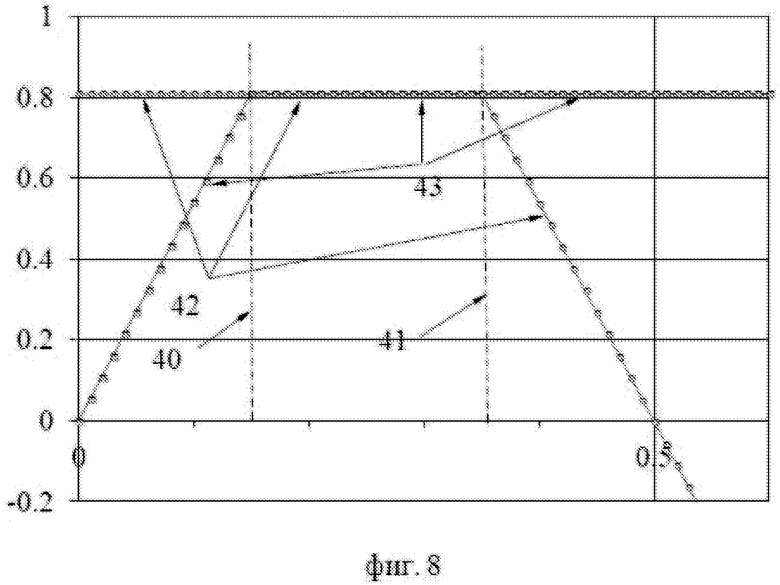
На фиг. 8 изображен график скоростей поворота качательных элементов ВИИПВ без ПОУС, с равными скоростями каждого качательного элемента в периоды: передачи главного движения через указанный качательный элемент; замыкания и размыкания МСХ связанной с указанным качательным элементом; в зависимости фазы вращения начального звена, отложенной по оси абсцисс в единицах π.
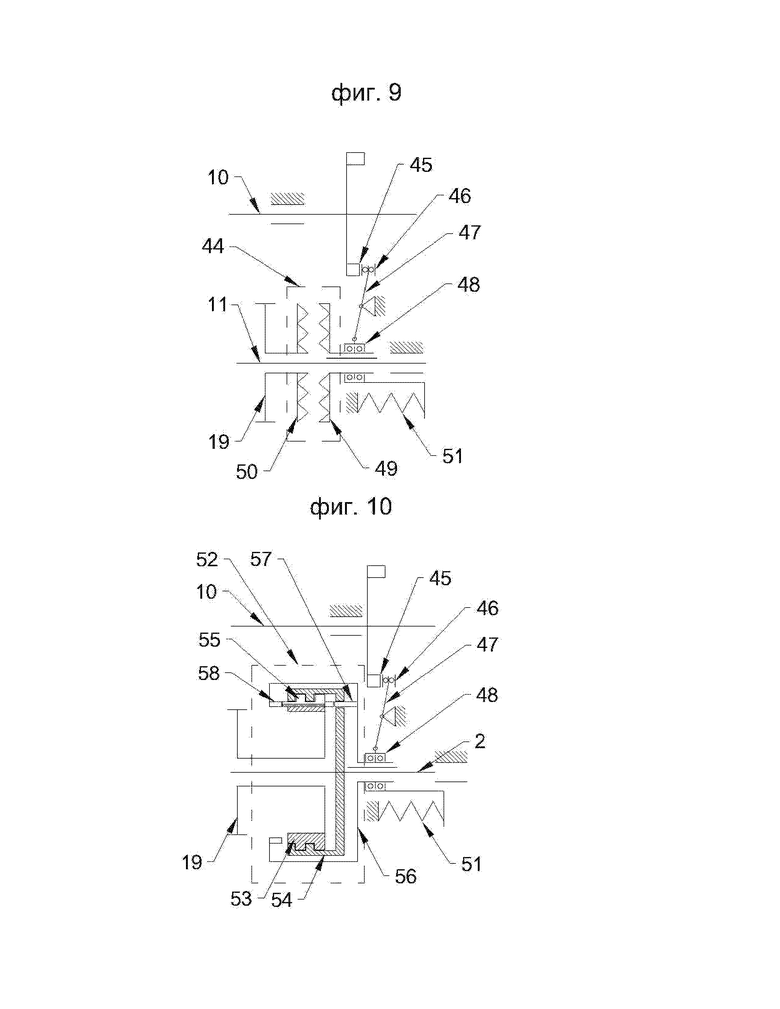
На фиг. 9 изображена кинематическая схема средства управления зубчатой муфтой.
На фиг. 10 изображена кинематическая схема средства управления шпоночной муфтой с добавлением выделенных сечений шпоночной муфты и шпонок, необходимых для раскрытия замысла изобретения.
Пример 1 (фиг 3, 4) реализации ВИИПВ на кривошипах и четырех МСХ. ВИИПВ включает в себя первичный вал 10, выполняющий роль начального звена, и вторичный вал 11, которые связаны между собой двумя одинаковыми кинематическими секциями 12 и 13. Каждая кинематическая секция содержит пульсатор, состоящий из некруглой первичной шестерни 14, установленной на первичный вал, и некруглой вторичной шестерни 15 установленной соосно вторичному валу и постоянно зацепленной с первичной шестерней. Вторичная шестерня жестко соединена с кривошипом 16, имеющим переменное плечо. Палец кривошипа зацеплен возвратно-поступательным ползуном 17 (образуя шотландский механизм), на котором установлены две зубчатые рейки 18, причем зубчатые рейки расположены по разные стороны от вторичного вала и направлены зубцами к вторичному валу. Каждая рейка зацеплена со своей круглой третичной шестерней 19, а каждая третичная шестерня связана с вторичным валом через обгонную муфту 20, выполняющую роль МСХ. Все обгонные муфты установлены для передачи вращения на вторичный вал в одном направлении. Третичные шестерни выполняют роли качательных элементов, а вторичный вал выполняет роль вращательного элемента соответствующего всем третичным шестерням. Кинематические секции настроены таким образом, чтобы двигаться со сдвигом фазы в 90 градусов. ВИИПВ снабжен средством синхронного изменения плечей кривошипов 21 во всех кинематических секциях, например в виде пары синхронизированных механизмов из RU2185897 или пары синхронизированных механизмов из прототипа, по одному механизму на каждый кривошип. Для снятия вращения с вторичного вала на него установлена выходная шестерня 22 (или звездочка, или шкив). Вращение, поданное на первичный вал, в каждой кинематической секции передается через пульсатор на кривошип, который приводит в движение возвратно-поступательный ползун, который через зубчатые рейки обеспечивают третичным шестерням качательное движение. Качательные движения всех третичных шестерен смещены на фазу, кратную 90 градусов и выпрямляются обгонными муфтами во вращение вторичного вала. Пульсаторы выполнены и установлены таким образом, чтобы в период замыкания каждой обгонной муфты и в период передачи движения на вторичный вал в замкнутом состоянии указанной обгонной муфты, с суммарной длительностью указанных периодов, равной (360 градусов)/N (равной 90 градусам для описываемого варианта исполнения), кривая скорости поворота третичной шестерни 23, связанной с этой обгонной муфтой была постоянной до момента 24 начала периода переключения (размыкания) указанной обгонной муфты. Возможность поворота третичной шестерни с постоянной скоростью связана с возможностью равномерного движения возвратно-поступательного ползуна в указанный период (И.И.Артоболевский. Механизмы в современной технике. Издание второе переработанное. 1980. Том 4. механизм 2269 стр 110. и механизм 2270 стр. 111). Также пульсаторы задают кривую скорости поворота каждой третичной шестерни после периода передачи через нее главного движения на вторичный вал, с момента начала периода переключения обгонных муфт до момента 25 окончания периода переключения обгонных муфт с условной длительностью в 10 градусов по фазе, замедляющуюся с ускорением равным:
ω2’=0.4*π2 *ϑ * ωa/N,
где
ω2’- модуль относительного ускорения между качательным элементом и соответствующим ему вращательным элементом в период переключения МСХ их связывающих.
При этом кривая скорости поворота другой третичной шестерни 26, которая будет следующей передавать движение на вторичный вал, имеет в период переключения МСХ постоянное значение, равное средней скорости вращения вторичного вала. Таким образом, замыкание и размыкание обоих участвующих в данном переключении обгонных муфт происходит с относительным угловым ускорением между качательным элементом и соответствующим ему вращательным элементом, не превышающим значения 0.4*π2 *ϑ * ωa/N. Так как указанное рассмотрение касается кривых скорости поворота всех третичных шестерней, то вывод распространяется на все обгонные муфты в устройстве. Переходный период может иметь отличное от 10 градусов значение, но он должен быть равен или превышать период переключения обгонных муфт, при работе устройства в штатном режиме. Также такой период, с точки зрения кинематики, должен быть меньше 90 градусов. Рассмотрим переходный период переключения МСХ подробнее. Назовем третичную шестерню, которая до выбранного переходного периода замкнута с вторичным валом через свою обгонную муфту, а после переходного периода ее обгонная муфта разомкнута – отключаемой третичной шестерней (ОТШ). И назовем третичную шестерню, которая до выбранного переходного периода не связана с вторичным валом, а после выбранного переходного периода ее обгонная муфта замкнута – подключаемой третичной шестерней (ПТШ). Сразу после момента начала периода переключения обгонных муфт ПТШ начинает поворачиваться быстрее, чем ОТШ, а значит быстрее, чем вращается вторичный вал. Заклинивающие элементы обгонной муфты ПТШ начинают поворачиваться в замыкающее положение. К моменту завершения замыкания обгонной муфты связанной с ПТШ ПОУС между ПТШ и выходным валом становится равным:
ПОУС = (2* ω2’* ϕ2)^0.5
Так как ω2’ как минимум в 5 раз меньше, чем ω’ в прототипе, то в обгонной муфте ВИИПВ погасится ПОУС в 2.24 раза меньше чем ПОУС в прототипе и выделится энергии, как минимум, в 5 раз меньше, чем в прототипе. То же рассуждение верно для всех переходных периодов переключения МСХ в рассмотренном примере реализации ВИИПВ на кривошипах и четырех МСХ. И это автоматически означает: улучшение условий работы МСХ; уменьшение износа МСХ и увеличение ресурса ИИПВ; уменьшение нагрева МСХ; понижение требований к материалам изготовления МСХ и их обработке; понижение требований к скорости переключения МСХ; увеличение КПД ИИПВ – так как уменьшается ПОУС; выравнивание передачи мощности ИИПВ – на ПОУС тратится меньшая мощность, а значит, колебания передачи мощности уменьшаются; уменьшение требований к системе охлаждения МСХ; повышение допустимой частоты движения качательных элементов – так как, при прочих равных условиях, ВИИПВ можно использовать на больших частотах вращения. В приведенном примере реализации при изменении амплитуды колебаний качающихся элементов, в период переключения МСХ, к ускорению связанной с ним третичной шестерни и к ускорению вторичного вала добавляется ускорение? связанное с изменением амплитуды колебаний третичной шестерни. Но добавка ускорения одинаковая для обоих элементов, а значит, мгновенное относительное ускорение между указанными элементами не меняется, а значит, достигаются вышеприведенные технические результаты. Указанные технические результаты так же достигаются во всех последующих примерах реализации ИИПВ, по тем же основаниям. Так как изменение плеча кривошипа и, соответственно, амплитуды движений качательных элементов возможно непрерывным (бесступенчатым) образом, то описанная передача является вариатором. Все вращательные, качательные, ползунковые кинематические пары могут быть выполнены с использование подшипников скольжения или качения (последнее предпочтительнее). Для автоматизации подстройки передаточного отношения ИВ к параметрам внешнего привода и/или к параметрам внешней нагрузки средство регуляции плечей кривошипов может быть выполнено автоматическим. Примером автоматической регулировки может служить конструкция В.Ф.Мальцев. «Механические импульсные передачи». М., Машиностроение, 1978 стр. 47 рис 2 или в А.С. SU155373 . Средство автоматической регулировки так же может быть выполнено, как на основе механического привода, так и на основе гидравлического, пневматического, электромагнитного приводов или их комбинации. Так же средство автоматической регулировки может содержать блок электронного управления. Для уменьшения дисбаланса, в ИИПВ может быть вставлено средство балансировки: для балансировки кривошипа, например, грузик с регулируемым радиусом его вращения, как в RU2185897; для балансировки возвратно-поступательного ползуна, например грузик с оппозитным движением, приводимым от возвратно-поступательного ползуна через шестерню, установленную в корпусе, по известной схеме балансировки затворной группы в автомате AEK – 971(ru.wikipedia.org/wiki/%C0%C5%CA-971.
Пример 2 (фиг. 5) реализации ВИИПВ на эксцентриках и четырех МСХ, отличающийся от ВИИПВ на кривошипах и четырех МСХ из примера 1 тем, что в каждой кинематической секции кривошип в шотландском механизме заменен на эксцентрик 27 (как показано И.И.Артоболевский. Механизмы в современной технике. Издание второе? переработанное. 1980. Том 5. механизм 2835) с переменным эксцентриситетом, а средство управления эксцентриситетом 28 обоих эксцентриков выполнено из двух синхронизированных механизмов, каждый из которых выполнен как: (И.И.Артоболевский. Механизмы в современной технике. Издание второе переработанное. 1980. Том 1. механизм 472); или US 20140123787 A1; или (В.Ф.Мальцев. «Механические импульсные передачи». М., Машиностроение, 1978 стр. 122 рис. 9 в). Такая замена позволяет снимать вращение непосредственно с вторичного вала без выходной шестерни (или звездочки или шкива). Вторичный вал может быть выведен из устройства в любую сторону или в обе стороны. Заметим, что ключевым условием достижения технического результата является наличие в ИИПВ пульсаторов в количестве не меньшим, чем округленная вверх до целого числа половина количества МСХ. Добавлением двух пульсаторов можно достичь того же технического результата в устройствах не имеющих зубчатых реек или винтов, например в устройстве (В.Ф.Мальцев. «Механические импульсные передачи». М., Машиностроение, 1978 стр. 26 рис. 21).
Пример 3 реализации ВИИПВ на эксцентриках и шести МСХ, отличающийся от ИИПВ на эксцентриках и четырех МСХ тем, что в него добавлена еще одна идентичная предыдущим кинематическая секция, а движение всех кинематических секций настроено таким образом, что бы движение третичных шестерен различалось по фазе на величину кратную 60 градусам. Такой вариант устройства уменьшает ускорение между третичной шестерней и вторичным валом в период переключения МСХ и, тем самым, уменьшает нагрузку на МСХ, но увеличивает размер, вес, массу, материалоемкость устройства на несколько десятков процентов. Аналогичным образом можно добавлять в устройство значительное количество кинематических секций.
Пример 4 реализации ВИИПВ на эксцентриках и трех МСХ, отличающийся от ВИИПВ на эксцентриках и шести МСХ тем, что в каждой кинематической секции убрана одна из зубчатых реек, третичная шестерня и обгонная муфта. А движение всех кинематических секций настроено таким образом, чтобы движение третичных шестерен различалось по фазе на величину кратную 120 градусам. Данный пример демонстрирует возможность реализации устройства на трех МСХ, но не имеет явных преимуществ перед ВИИПВ на эксцентриках и четырех МСХ из примера 2.
Пример 5 (фиг. 6) реализации ВИИПВ с кулачково-планетарными пульсаторами, отличающийся от ВИИПВ на эксцентриках и четырех МСХ тем, что роль пульсатора в каждой кинематической секции выполняет кулачково-планетарные механизм (И.И.Артоболевский. Механизмы в современной технике. Издание второе переработанное. 1980. Том 5. механизм 3120), состоящий из водила 29, установленного на водило планетарного зубчатого сателлита 30, зацепленного за неподвижную шестерню 31, с тем же количеством зубцов, что и у сателлита кулачка 32, установленного на сателлит и зацепленного с роликом 33, установленного на коромысло 34, и пружины (не показана на чертеже). На коромысло установлен эксцентрик с переменным эксцентриситетом. Первичный вал установлен внутри полого вторичного вала. Использование такого пульсатора позволяет упростить изготовление ВИИПВ, увеличить его КПД, упростить проектирование и взаимосогласование элементов ВИИПВ, уменьшить размеры ввиду того, что первичный вал и вторичный вал установлены соосно.
Для уменьшения габаритов пульсатора и уменьшения контактного давления на каждый кулачок пульсатор может включать два или более одинаковых кулачка. С целью увеличения площади контакта кулачка и ролика и уменьшения давления в области контакта один из этой пары элементов может быть выполнен частично полым, а другой элемент пары вставлен в эту полость, то есть элементы будут контактировать один поверхностью внутреннего радиуса, а другой поверхностью внешнего радиуса. В различных вариантах исполнения кулачок пульсатора может быть ведущим или ведомым по отношению к вращательному звену, на который он установлен. Для увеличения частоты работы пульсатора и избавления от пружины ролик может быть вставлен в фигурный паз кулачка.
Пример 6 (фиг. 7) реализации ВИИПВ на наклонных шайбах и четырех МСХ, отличающийся от ВИИПВ на кривошипах и четырех МСХ из примера 1 тем, что каждая кинематическая секция состоит из кулачково-планетарного пульсатора 35, вращающейся наклонной шайбы 36 переменного наклона, которая связана через упорный подшипник с качающейся шайбой 37. Качающаяся шайба через кулису связана с двумя возвратно поступательными ползунами с винтом 38, каждый из которых через шариковое винто-гаечное зацепление связан с промежуточной шестерней 39, которая зацеплена с третичной шестерней. Кинематические секции настроены для движения третичных шестерней со смещением по фазе на 90 градусов. ВИИПВ снабжен средством синхронного изменения наклонения вращающихся шайб, выполненным, например, на основе (В.Ф.Мальцев. «Механические импульсные передачи». М., Машиностроение, 1978 стр. 31,32 рис. 26). Вращение, поданное на первичный вал, преобразуется пульсатором в пульсирующее вращение наклонной шайбы, далее преобразуется в качательные движения качательной шайбы, далее в движение возвратно-поступательного ползуна с винтом, которое преобразуется в качательные движения промежуточной шестерни, и далее в качательные движения третичной шестерни. Данные пример демонстрирует возможность реализации изобретения с различным построением кинематических секций. При размещении наклонных и качающихся шайб с одной стороны от блока с обгонными муфтами, появляется возможность вывода вторичного вала из устройства и снятия вращения непосредственно с него.
Пример 7 (фиг. 8) реализации ВИИПВ без ПОУС, отличающийся от ВИИПВ на эксцентриках и четырех МСХ из примера 2 тем, что кинематическая схема пульсаторов выполнена таким образом, что в период переключения МСХ (между моментом 40 начала периода переключения МСХ и моментом 41 окончания периода переключения МСХ) ОТШ (имеющая кривую скорости поворота 42) и ПТШ (имеющая кривую скорости поворота 43) поворачиваются с одинаковой угловой скоростью, то есть практически неподвижны относительно друг друга и относительно вторичного вала. Такой вариант исполнения позволяет практически исключить ПОУС при переключении МСХ, тем самым дополнительно усилить все технические результаты изобретения. Описанное изменение кинематической схемы возможно для всех примеров реализации ВИИПВ с 1 по 6. Обгонные муфты могут быть заменены на фрикционные муфты с принудительным приводом управления их замыкания и/или размыкания от первичного вала: механическим (например, кулачковый механизм замыкания фрикционной муфты в RU2297565 или другие замыкающие или размыкающие кулачково-рычажные или кулачково-толкательные механизмы), или гидравлическим, или пневматическим, или электромагнитным, или комбинацией указанных приводов. Первую половину периода 40-41 замыкается фрикционная муфта, относящаяся к ПТШ, вторую половину периода размыкается фрикционная муфта, относящаяся к ОТШ. Фрикционные муфты могут быть выполнены с одной или несколькими фрикционными парами, характеризуемыми мокрым или сухим трением. В этом варианте ВИИПВ достигаются: увеличение предельной частоты работы ВИИПВ (ввиду внешнего принудительного управления МСХ); возможность обратной передачи вращения от вторичного вала на первичный вал; уменьшение габаритов, массы, материалоемкости, увеличение предельного крутящего момента так как, фрикционные муфты, особенно многодисковые имеют больший удельный крутящий момент на единицу объема и массы, чем обгонные муфты.
Пример 8 (фиг.9) реализации многоступенчатой ИИПВ (МИИПВ) с передачей вращения методом нефрикционного зацепления, отличающийся от реализации ВИИПВ без ПОУС из примера 7 тем, что в цепи передачи главного движения фрикционные муфты заменены на зубчатые муфты, а привод замыкания зубчатой муфты 44 в каждой кинематической секции содержит управляющий кулачок 45, установленный на первичный вал, который контактирует с роликом 46, установленным на управляющее коромысло 47. Другой конец управляющего коромысла через кулису зацеплен с полым ползуном 48, установленным поверх вторичного вала с возможностью осевого перемещения. Полый ползун через двойной подшипник связан с продольно-подвижной полумуфтой 49 зубчатой муфты, причем подвижная полумуфта установлена на вторичный вал через шлицы. Продольно-неподвижная полумуфта 50 жестко связана с третичной шестерней. Полый ползун отжимается от продольно-неподвижной полумуфты ползунной пружиной 51. При вращении первичного вала кулачок в фазе соответствующей передаче мощности через указанную зубчатую муфту перемещает ролик от себя, это движение преобразуется управляющим коромыслом в движение полого ползуна в сторону продольно-неподвижной полумуфты, и преобразуется в движение в ту же сторону продольно-подвижной полумуфты, зубчатая муфта замыкается и данная кинематическая секция начинает передавать мощность на вторичный вал. По окончании фазы передачи движения через данную кинематическую секцию кулачок перестает давить на ролик, ползунная пружина отжимает полый ползун и вместе с ним продольно-подвижную полумуфту от продольно-неподвижной полумуфты, что приводит к размыканию зубчатой муфты и прекращению передачи мощности через эту зубчатую муфту. В данном варианте реализации невозможна бесступенчатая передача вращения, а возможна только многоступенчатая. Механизм изменения амплитуды колебаний в каждой кинематической секции (плеча кривошипа или эксцентриситета эксцентрика или наклона наклонной шайбы) выполнен шаговым, причем указанный шаг согласован с шагом зубцов зубчатой муфты, таким образом, чтобы при изменении амплитуды качаний качательных элементов при замыкании зубчатой муфты ее зубцы попадали во впадины. Кроме того, фаза изменения шага амплитуды колебаний заканчивается до фазы начала замыкания зубчатой муфты. Подобные шаговые механизмы хорошо известны в технике, например мальтийский механизм, так же может быть использован шаговый электродвигатель с блоком управления. Описанная МИИПВ допускает переключение передач без разрыва передачи мощности. Неподвижность полумуфт зубчатой муфты относительно друг друга в период ее замыкания и в период ее размыкания позволяет выполнить зубцы и углубления полумуфт равными в окружном направлении с точностью до зазоров необходимых для относительного осевого движения полумуфт. Такое выполнение означает нефрикционное безлюфтовое, в направлении передаваемого движения, зацепление МСХ. Такой вариант выполнения ИИПВ резко увеличивает предельные передаваемый крутящий момент, уменьшает габариты, массу, и материалоемкость, так как относительное усилие передаваемое зацеплением значительно выше такового у фрикционной муфты. Для уравновешивания нагрузок часть управляющего коромысла, соединяемая с полым ползуном, может быть выполнена в виде вилки зацепляемой с полым ползуном с противоположных сторон последнего. Для упрощения изготовления и сборки МИИПВ управляющие кулачки могут быть установлены на специальном управляющем валу, приводимом от первичного вала, с периодом обращения равным или кратным периоду вращения первичного вала. Кинематика привода управления зубчатой муфты может быть выполнена таким образом, чтобы управляющий ролик размыкал зубчатую муфту, а замыкала муфту ползунная пружина. Также кинематика привода управления зубчатой муфты может быть выполнена в виде десмодромного механизма, в котором и замыканием и размыканием зубчатой муфты управляет один или несколько кулачков. В таком варианте устраняется необходимость в ползунной пружине, что резко повышает предельную частоту работы управляющего механизма.
Пример 9 реализации МИИПВ с храповым механизмом отличающийся от реализации МИИПВ с передачей вращения методом зацепления, тем, что зубчатые муфты заменены общеизвестным в технике храповыми муфтами. Такой вариант резко упрощает МИИПВ, уменьшает его габариты, вес, материалоемкость, так как устраняет необходимость в механизме замыкания и/или размыкания зубчатой муфты. Для увеличения количества ступеней МИИПВ количество собачек S в храповой муфте может быть выполнено отличающимся на единицу или другое небольшой число от количества углублений Z или зубцов для зацепления собачек. В этом случае количество передаточных отношений P может достигать значения
P=|S*Z/(S-Z)|,
где:
P – количество передаточных отношений в МИИПВ;
S – количество собачек в храповом механизме;
Z – количество углублений или зубцов для зацепления собачек.
Шаговый механизм управления амплитуды колебаний выполнен таким образом, чтобы в фазе замыкания хотя бы одна собачка храповой муфты попадала в соответствующее углубление.
Пример 10 (фиг. 10) реализации МИИПВ со шпоночной муфтой, отличающаяся от реализации МИИПВ с передачей вращения методом нефрикционного зацепления тем, что зубчатая муфта заменена шпоночной муфтой 52 с подвижными шпонками. Профиль внешней окружной стороны шпоночной полумуфты, жестко связанной с третичной шестерней 53 (ШПМТШ), и профиль внутренней окружной стороны шпоночной полумуфты жестко связанной с вторичным валом 54 (ШПМВВ) выполнены зубчатыми, причем так, чтобы указанные полумуфты не задевали друг друга при относительном повороте. Зубцы ШПМТШ выполнены шире в осевом направлении, чем зубцы в ШПМВВ. В равномерно размещенные по окружности ШПМТШ прорези вставлены подвижные в осевом направлении шпонки 55. Профиль зубцов и углублений шпонок в незамкнутом состоянии шпоночной муфты совпадает с профилем зубцов и углублений ШПМТШ. Полый ползун через двойной подшипник соединен с втулкой управления шпонками 56, на которой равномерно по окружности установлены прямые толкатели 57 входящие в прорези ШПМВВ и обратные толкатели 58. Втулка управления шпонками установлена на вторичном валу на шлицах. В ШПМВВ напротив толкателей вырезаны прорези в которые могут входить шпонки при перемещении их в сторону третичной шестерни. Количество шпонок и количество прорезей в ШПМВВ различается на единицу (или другое небольшое число). В фазе передачи мощности через указанную третичную шестерню управляющий кулачок, через управляющее коромысло и полый ползун сдвигает втулку управления шпонками в сторону третичной шестерни, прямые толкатели сдвигают по крайней мере одну шпонку, которая входит в зацепление с ШПМВВ и тем самым замыкает шпоночную муфту. В фазе отсутствия передачи мощности через указанную третичную шестерню, управляющий кулачок перестает давить на ролик, ползунная пружина через полый ползун возвращает втулку управления шпонками в первоначальное положение, обратные толкатели возвращают все шпонки в первоначальное положение, шпонки перестают зацепляться за ШПМВВ, тем самым шпоночная муфта размыкается. Данный вариант уменьшает массу перемещаемых элементов при замыкании/размыкании шпоночной муфты и, ввиду незначительной ширины шпонок, позволяет значительно увеличить их количество, тем самым увеличить количество ступеней (количество передаточных отношений) в МИИПВ. Зубцы шпонок и ШПМВВ могут иметь скос в окружном сечении для автоматического возвращения шпонок в первоначальное положение и размыкания шпоночной муфты в случае отставания поворота третичной шестерни от поворота вторичного вала (как это делается в храповых механизмах), это увеличивает безопасность МИИПВ и позволяет избавиться от обратных толкателей и ползунковой пружины. Для уменьшения трения в процессе замыкания и размыкания шпоночной муфты шпонки могут иметь небольшое сужение своего продольного сечения перпендикулярного плоскости чертежа сторону третичной муфты, такое сужение уменьшает длину пути движения шпонки под основной нагрузкой в окружном направлении, что уменьшает износ шпонок и шпоночной муфты, а значит, увеличивает ресурс МИИПВ. Для упрощения размещения большого количества шпонок, с целью увеличить количество ступеней передаточного отношения, та часть шпонок, которая взаимодействует с прямым толкателем, может быть размещена на разных расстояниях от оси вращения для разных шпонок.
| название | год | авторы | номер документа |
|---|---|---|---|
| ИМПУЛЬСНЫЙ ВАРИАТОР | 2016 |
|
RU2620278C2 |
| Импульсный вариатор | 2016 |
|
RU2617227C2 |
| Реечный импульсный вариатор с одновальным выпрямителем | 2016 |
|
RU2617245C2 |
| ДЕСМОДРОМНЫЙ КУЛАЧКОВЫЙ ПРИВОД КЛАПАНА ГАЗОРАСПРЕДЕЛИТЕЛЬНОГО МЕХАНИЗМА С РЕГУЛИРОВКОЙ СТЕПЕНИ ОТКРЫТИЯ КЛАПАНА | 2020 |
|
RU2730196C1 |
| РЫЧАЖНЫЙ ВАРИАТОР | 2011 |
|
RU2467227C1 |
| Распределительно-подающий механизм редукторного типа стана холодной прокатки труб (его варианты) | 1984 |
|
SU1212639A1 |
| Роторный автомат | 1990 |
|
SU1722721A1 |
| Кривошипно-коромысловый механизм Вахрушевых (варианты) | 2019 |
|
RU2822681C2 |
| СИЛОВОЙ АГРЕГАТ ТРАНСПОРТНОГО СРЕДСТВА (ВАРИАНТЫ) | 2012 |
|
RU2499170C1 |
| ПРИВОД ПЛАВНИКОВОГО ДВИЖИТЕЛЯ | 2005 |
|
RU2284945C1 |

Изобретение относится к области машиностроения, а более конкретно к импульсным передачам. Импульсная изменяемая передача вращения (ИИПВ) содержащая в кинематической цепи передачи главного движения более двух механизмов свободного хода (МСХ). Каждый МСХ выполнен связывающим соосно установленные качательный элемент и соответствующий качательному элементу вращательный элемент. Относительное угловое ускорение между качательным элементом и вращательным элементом, соединенными через МСХ, не превышает
0.4*

где: 

1. Импульсная изменяемая передача вращения (ИИПВ), содержащая в кинематической цепи передачи главного движения более двух механизмов свободного хода (МСХ), каждый из которых выполнен связывающим соосно установленные элементы: качательный элемент и соответствующий качательному элементу вращательный элемент, отличающаяся тем, что кинематическая схема ИИПВ характеризуется при любой штатной фиксированной амплитуде колебаний качательных элементов, для любого МСХ главного движения в период его замыкания и в период его размыкания, относительным угловым ускорением между качательным элементом и вращательным элементом, соединенными через указанный МСХ, не превышающим величины
0.4⋅π2⋅ϑ⋅ωa/N,
где π – число Пи;
ϑ – частота колебаний указанного качательного элемента;
ωa - средняя скорость поворота качательного элемента за период передачи им главного движения, то есть в период, когда МСХ, связанная с данным качательным элементом, замкнута;
N – количество МСХ в кинематической цепи главного движения.
2. Устройство по п. 1, отличающееся тем, что включает в каждую из двух или более параллельных кинематических цепей передачи главного движения средство передачи вращения с циклически изменяемым передаточным отношением, но с фиксированным средним передаточным отношением (пульсатор).
3. Устройство по п. 1, отличающееся тем, что содержит в кинематической цепи главного движения 3, или 4, или 6, или более МСХ.
4. Устройство по п. 1, отличающееся тем, что пульсаторы выполнены в виде кулачково-планетарного механизма.
5. Устройство по п. 1, отличающееся тем, что содержит в кинематической цепи главного движения синусоидальные механизмы: шотландские механизмы на кривошипах, или на эксцентриках, или механизмы с наклонной вращающейся шайбой и толкателем.
6. Устройство по п. 1, отличающееся тем, что кинематическая схема характеризуется, при любой штатной фиксированной амплитуде колебаний качательных элементов, в периоды замыкания и размыкания каждого МСХ главного движения, равной скоростью поворота качательного элемента и вращательного элемента, связанных через указанный МСХ.
7. Устройство по п. 6, отличающееся тем, что кинематическая схема характеризуется, при любой штатной фиксированной амплитуде колебаний качательных элементов, в периоды замыкания, размыкания каждого МСХ и передачи через него главного движения, равной и постоянной скоростью поворота качательного элемента и вращательного элемента, связанных через указанный МСХ.
8. Устройство по п. 1, отличающееся тем, что каждый МСХ главного движения выполнен в виде управляемой муфты, а устройство дополнено средством управления муфты.
9. Устройство по п. 1, отличающееся тем, что выполнено в виде вариатора или многоступенчатой передачи.
10. Устройство по п. 6, отличающееся тем, что МСХ главного движения характеризуется передачей вращения методом нефрикционного безлюфтового, в направлении передаваемого движения, зацепления.
11. Устройство по п. 6, отличающееся тем, что каждое МСХ главного движения выполнено в виде храпового механизма.
12. Устройство по п. 6, отличающееся тем, что управляемые муфты выполнены в виде: фрикционной муфты, или зубчатой муфты, или шпоночной муфты с подвижными шпонками.
| Механический вариатор скорости вращения | 1985 |
|
SU1414990A1 |
| ВАРИАТОР | 2010 |
|
RU2438057C1 |
| ИМПУЛЬСНЫЙ ВАРИАТОР ТРАНСПОРТНОГО СРЕДСТВА | 2011 |
|
RU2475667C1 |
| US 6840884 B2, 11.01.2005 | |||
| Инерционный импульсатор | 1980 |
|
SU1013664A1 |
| Устройство для разгрузки вагонов | 1947 |
|
SU81066A1 |

