Настоящее изобретение относится к области инструментов, а именно к долоту, в частности для ручных обрабатывающих инструментов. Долота должны дробить основу на фрагменты. Пользователь приставляет для этого долото к основе. Сначала долото внедряется вдоль своей оси в основу. При этом долото вытесняет материал при создании сжимающих напряжений. Если напряжения превышают предельно допускаемую нагрузку на основу, она разрушается в окружении долота. Правда, если основа оказывает сопротивление, происходит заклинивание долота в основе. Пользователь может извлечь долото из основы только с большим физическим усилием.
Раскрытие изобретения
Задача изобретения заключается, таким образом, в разработке долота, которое имеет улучшенные свойства в сравнении с уже известными долотами.
Предложенное в соответствие с изобретением долото имеет меньшую тенденцию к заклиниванию в основе.
Неожиданно было обнаружено, что эта задача решается с помощью долота, которое по оси в направлении удара последовательно имеет следующие друг за другом ударную поверхность, хвостовик, распорное тело и острие, причем распорный элемент содержит несколько проходящих вдоль оси ребер, которые расположены с распределением вокруг оси, и ребра выполнены соответственно волнообразными с тангенциальным отклонением к оси. Тангенциальное отклонение перпендикулярно к радиальному направлению и перпендикулярно к оси. Тангенциальное отклонение может быть изогнутым, например, в форме круга вдоль окружного направления вокруг оси или прямолинейным вдоль касательной к окружному направлению или комбинацией круглого и прямолинейного отклонения. Волнистость обусловливает, в противоположность к винтовой линии, отклонение ребра попеременно в окружном направлении и против окружного направления вокруг оси. Попеременное отклонение вызывает касательные напряжения в обрабатываемом объекте, которые уменьшают тенденцию долота к заклиниванию.
Амплитуда отклонения предпочтительно ограничена. Амплитуда обозначает расстояние между двумя следующими друг за другом экстремумами отклонения. Амплитуда отклонения предпочтительно меньше, чем ширина ребра. Отклонение в окружном направлении вокруг оси может быть равно амплитуде отклонения против окружного направления. Амплитуда отклонения может составлять между 5 и 20°.
По меньшей мере одно из ребер может быть отклонено само по себе параллельно в окружном направлении вокруг оси благодаря тангенциальному волнообразному отклонению. Форма перпендикулярного оси поперечного сечения непрерывно изменяется вдоль оси.
По меньшей мере одно из ребер в окружном направлении вокруг оси может быть повернуто благодаря тангенциальному волнообразному отклонению. Перпендикулярное к оси поперечное сечение поворачивается вдоль оси при сохранении своей формы попеременно в окружном направлении и против окружного направления.
Отклонение вызывает наклон ребра по отношению к оси 15. Наклон варьируется синхронно с формой волны. Наклон является предпочтительным, чтобы предотвратить заклинивание. Одновременно соответственно вкладу большой наклон является мешающим отбойке. Периодически изменяющийся вдоль оси (2) угол (34) принимает наименьшее и наибольшее значение. Наименьшее значение лежит преимущественно в диапазоне между -20 и -3° и наибольшее значение лежит между 3 и 20°.
Долото предпочтительно имеет по меньшей мере три волновых цуга.
Краткое описание фигур
Следующее ниже описание поясняет изобретение с помощью приведенных в качестве примера вариантов осуществления и фигур. На фигурах показано:
фиг.1: долото,
фиг.2, 3 и 4: поперечные сечения долота в плоскостях II-II, III-III, соответственно IV-IV на фиг.1,
фиг.5, 6 и 7: поперечные сечения долота и
фиг.8: перфоратор.
Одинаковые или функционально одинаковые элементы на фигурах обозначаются одинаковыми позициями, если не указано иное.
Формы осуществления изобретения
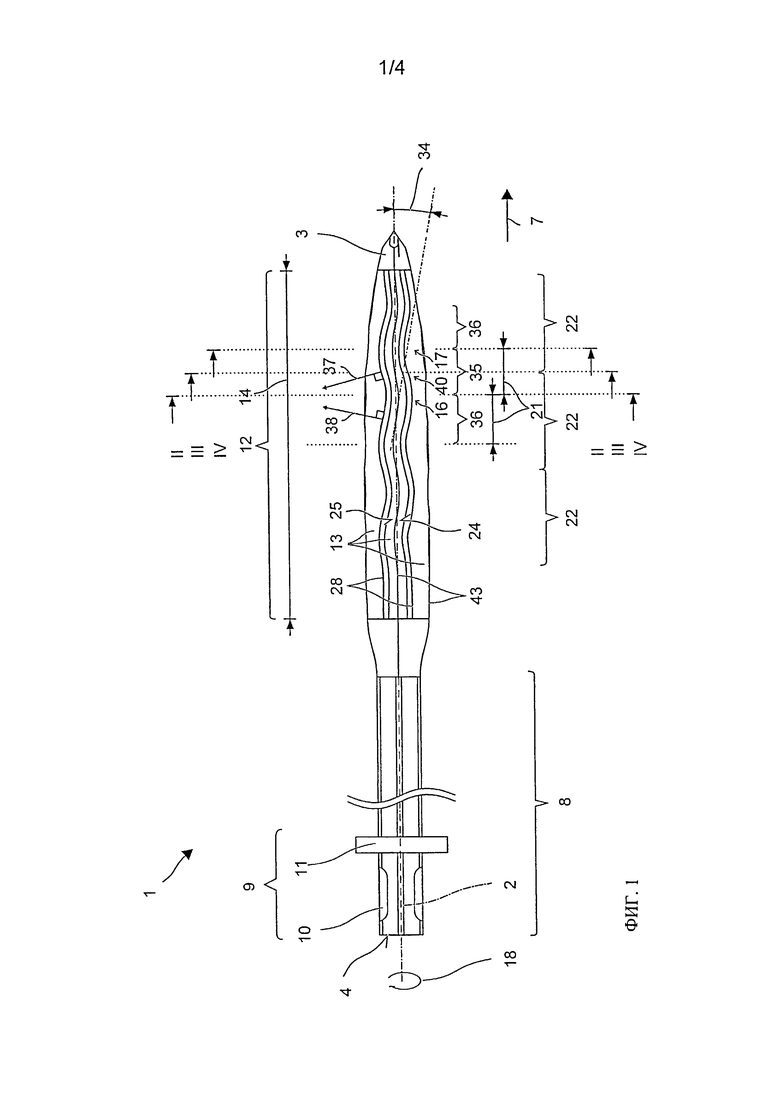
Фиг.1 показывает вид сбоку образцового долота 1. Долото 1 имеет расположенное на одном конце острие 3 и расположенную на противоположном конце ударную поверхность 4. Удар, произведенный бойком 5, 56 ручного обрабатывающего устройства 6 по ударной поверхности 4, передается в направлении 7 удара вдоль оси 2 от ударной поверхности 4 острию 3.
Ударная поверхность 4 образована торцевой стороной стержня 8 долота 1. Торцевая сторона в основном ориентирована перпендикулярно к оси 2 и выполнена выпуклой или ровной. Стержень 8, выполненный предпочтительно коаксиально оси 2, имеет призматическое, например, гексагональное или цилиндрическое, например кругло-цилиндрическое поперечное сечение. Область стержня 8, непосредственно примыкающая к ударной поверхности 4, может быть выполнена в виде хвостовика 9 для установки для бурильного молотка или зубильного молотка. Например, в стержне 8 вдоль оси 2 могут быть проделаны имеющие форму канавки углубления, с которыми могут входить в зацепление фиксирующие элементы ручного обрабатывающего устройства 6. Альтернативно или дополнительно на стержне 8 может быть предусмотрен кольцевой выступ 11. Радиально выдающийся выступ 11 может захватываться зажимом бурового молотка 6 для осевой фиксации долота.
Сужающееся в направлении 7 удара острие 3 образовано преимущественно симметрично относительно оси 2. Например, острие 3 имеет пирамидальную или коническую форму.
На оси 2 между острием 3 и стержнем 8 расположено распорный элемент 12, который уменьшает заклинивание долота 1 в основе. Распорный элемент 12 изготовлен из того же материала, что и все острие, предпочтительно из стали. Фиг.2 иллюстрирует поперечное сечение приведенного в качестве примера распорного элемента в плоскости II-II, Фиг.3 - поперечное сечение в плоскости III-III и Фиг.4 - поперечное сечение в плоскости IV-IV. Плоскость III-III лежит посередине между плоскостями II-II и IV-IV. Приведенный в качестве примера имеющий форму стержня распорный элемент 12 имеет несколько проходящих вдоль оси 2 ребер 13, которые с распределением расположены вокруг оси 2. Все ребра 13 начинаются предпочтительно от острия 3. Их соответствующая длина (размер вдоль оси 2) может быть равна и, в частности, равна длине 14 распорного элемента 12. Ребра 13 предпочтительно расположены с равными углами 15 вокруг оси 2. В приведенной в качестве примера форме осуществления ребра 13 выполнены идентичными и параллельными друг другу.
Ребра 13 являются волнообразными с изменяющимся тангенциально к оси 2 отклонением. Характерными для волнообразности являются локальные минимумы 16 и максимумы 17 отклонения, которые возникают вдоль оси 2. Начиная от минимума 16, идя вдоль направления 7 удара, отклонение ребра 13 непрерывно повышается в окружном направлении 18 вплоть до следующего максимума. На представленных фигурах окружное направление 18, если смотреть в направлении 7 удара, выбрано против движения часовой стрелки. Начиная от максимума 17, идя вдоль направления 7 удара, отклонение ребра 13 непрерывно уменьшается против окружного направления 18 до следующего минимума 16. Тангенциальное к оси 2 отклонение изменяется, например, синусоидально вдоль оси 2.
Если долото 1 вошло в основу, минимумы 16 совершают силовое воздействие против окружного направления 18 и максимумы совершают силовое воздействие в окружном направлении 18 на основу. Результирующие силы сдвига ослабляют тенденцию к заклиниванию глубоко внедренного в основу долота 1.
Среднее отклонение ребра 13 предпочтительно равно нулю, отклонения в окружном направлении 18 и отклонения против окружного направления 18 равны по величине. Все минимумы ребра 13 лежат на одной прямой вдоль оси 2. Минимумы 16 ребра 13 смещены вдоль оси 2 друг к другу, но, впрочем, имеют одинаковое угловое положение 19 относительно оси 2. Равным образом предпочтительно все максимумы 17 ребра 13 лежат на одной прямой вдоль оси 2 с угловым положении 20. Симметричная конструкция способствует равномерному приложению сил в и против окружного направления 18 и улучшенным характеристикам в отношении заклинивания долота 1 в основе. Экстремумы 16, 17 расположены предпочтительно с постоянными интервалами 21 вдоль оси 2. Таким образом, ребра 13 на достаточно протяженном участке проходят зеркально симметрично относительно перпендикулярной оси 2 плоскости, которая проходит через один из минимумов 16 или один из максимумов 17, например, одной из плоскостей II-II или IV-IV.
В качестве примера ребра 13 предусмотрены предпочтительно в количестве между тремя ребрами 13 для узкого долота 1 и шестью ребрами 13 для широкого долота 1. Ребра 13 предпочтительно расположены с равномерным распределением вокруг оси 2. Конструкция обладает вращательной симметрией, чтобы силы в и против окружного направления 18 были равны по величине. Все ребра 13 могут иметь, как изображено, одинаковую форму, вследствие чего в изображенной в качестве примера конструкции получается ось симметрии четвертого порядка. В качестве альтернативы, например, при четырех ребрах диаметрально противоположные ребра выполнены одинаковыми, но разными по отношению к соседним ребрам. Таким образом, осевая симметрия с четырьмя ребрами имеет только второй порядок.
Ребра 13 приведенного в качестве примера распорного элемента 12, имеют соответственно три минимума 16 и три максимума 17, таким образом, три волновых цуга 22. Число экстремумов 17, 16 зависит от длины 14 распорного элемента 12. Интервал 21 между одним экстремумом 16, 17 и следующим экстремумом 17, 16 лежит предпочтительно в диапазоне между 1 и 3 см. Долото 1 при обработке основы обычно входит на глубину до 10 см и более чем одним волновым цугом 22.
Ребро 13 имеет гребень 23, и у гребня 23 имеется прилегающий против окружного направления 18 первый склон и в окружном направлении 18 второй склон. Поверхность ребра 13 состоит в значительной мере из ориентированной в окружном направлении 18 первой боковой поверхности 24, гребня 23 и второй боковой поверхности 25, ориентированной против окружного направления 18. Первая боковая поверхность 24 ориентирована исключительно в окружном направлении 18. Первая боковая поверхность 24 в окружном направлении 18 отклоняется только по направлению к оси 2. Первая боковая поверхность 24 является сплошной и проходит по всему осевому размеру 14 ребра 13. Вторая боковая поверхность 25 показана как ответная часть к первой боковой поверхности 24 только против окружного направления 18. Вторая боковая поверхность 25 везде поднимается в окружном направлении 18, т.е. удаляется от оси 2. Подобно первой боковой поверхности 24 вторая боковая поверхность 25 проходит вдоль всей длины 14 ребра 13 и является сплошной.
Вторая боковая поверхность 25 проходит вдоль оси 2 предпочтительно параллельно к первой боковой поверхности 24. Кривизна в направлении 7 удара первой боковой поверхности 24 равна кривизне в направлении 7 удара второй боковой поверхности 25. Ширина 26 ребра 13 вдоль оси 2 постоянна. Ширина 26 может количественно определяться на половине высоты 27 ребра 13. Половина высоты 27 является половиной радиального расстояния между гребнем 23 и основанием 28 или половиной арифметического среднего наружного диаметра 29 и внутреннего диаметра 30. Перекрытие окружности несколькими ребрами 13 лежит на половине высоты 27 между 90 и 150°. Ширина 26 ребер 13 у распорного тела 12 с четырьмя ребрами 13 лежит в угловом размере между 22,5 и 37,5°.
Ребро 13 имеет предпочтительно зеркально симметричный профиль. Поперечные сечения ребра 13, перпендикулярные к оси 2, зеркально симметричны оси 31 симметрии, проходящей через гребни 23. Проходящая от гребня 23 в радиальном направлении кривизна вдоль радиального направления первой боковой поверхности 24 зеркально симметрична (негатив) кривизне вдоль радиального направления второй боковой поверхности 25.
Гребень 23 может быть плоским или, как в представленном примере, в форме линии. Гребень 23 проходит тангенциально к окружному направлению 18. Примыкающие к гребню 23 обе боковые поверхности 24, 25 круто спускаются в или соответственно против направления 18 обхода от гребня 23 в направлении к оси 2. Гребень 23 состоит из точек на поверхности ребра, которые в плоскостях перпендикулярно к оси 2 имеют наибольшее радиальное расстояние до оси 2. Интервал между гребнем 23 и осью 2 уменьшается предпочтительно непрерывно вдоль направления 7 удара, в частности в области острия 3 гребень 23 монотонно приближается к оси 2. Интервал 23 может альтернативно вдоль оси 2 периодически увеличиваться и уменьшаться. Лежащие ближе всего к оси 2 точки поверхности образуют основание 28 ребра 13. Интервал 30 от основания 28 до оси 2 предпочтительно постоянен по всей длине 14 распорного тела 12. Основание 28 ребра 13 может переходить в основание 28 соседнего в окружном направлении 18 ребра 13.
Расположенные вокруг оси 2 ребра 13 образуют невыпуклую форму распорного тела 12. Отведенные назад в радиальном направлении по отношению к гребню 23 боковые поверхности 24, 25 ограничивают проходящие между ребрами 13 ходы 32. Ходы 32 находятся внутри выпуклых огибающих распорного тела 12. Наружный диаметр 29, заданный двойным интервалом гребня 23 от оси 2, предпочтительно, по меньшей мере, на 50% больше, чем внутренний диаметр 30, заданный двойным интервалом основания 28 от оси 2, распорного тела 12. Ребра 13 могут радиально отстоять от сердечника 33. Сердечник 33 представлен выпуклым сплошным телом, например, концентричным относительно оси 2 телом вращения или цилиндром.
Первая боковая поверхность 24 соответственно ребер 13 является волнообразной. Угол 34 между первой боковой поверхностью 24 и осью 2 изменяется попеременно вдоль оси 2. Угол 34 принимает, в частности, отрицательные и положительные значения, вследствие чего конструкция решающим образом отличается от спирали с постоянным углом и постоянным направлением вращения. Угол 34 изменяется, в качестве примера, синусоидально вдоль оси 2. Максимальное значение угла 34 лежит между 3 и 20°, минимальное значение угла лежит между -3 и -20°.
Первая боковая поверхность 24 вдоль оси 2 разделена на попеременно следующие друг за другом первые участки 35 и вторые участки 36. Первая боковая поверхность 24 на первых участках 35 наклонена под положительным углом 34 к оси 2. Первая боковая поверхность 24 поднимается, следуя направлению 7 удара, в окружном направлении 18. Наклонные на первых участках 35 первые боковые поверхности 25 и их вертикали 37 ориентированы в направлении 7 удара. Вторые участки 36 противоположны первым участкам 35. Первая боковая поверхность 24 принимает отрицательный угол 34 к оси 2. Вдоль направления 7 удара первая боковая поверхность 24 противоположна окружному направлению 18. Первая боковая поверхность 24 и ее вертикали 38 смотрят против направления 7 удара к ударной поверхности 4.
Тангенциальное отклонение ребра 13 осуществляется, например, с помощью параллельного смещения. Первая боковая поверхность 24 в минимуме 16 параллельна себе в максимуме 17 и предпочтительно всем другим поперечным сечениям перпендикулярным оси 2. Наклон 34 первой боковой поверхности 24 к оси 2 хотя и изменяется неоднократно вдоль оси 2, однако в радиальном направлении постоянный. В предпочтительно зеркально симметричном ребре 13 его различающиеся вдоль оси 2 оси симметрии 31 параллельны друг другу. Параллельное смещение может осуществляться вдоль прямой 39, которая перпендикулярна к оси 2 и тангенциально прилегает к одному месту гребня 23 ребра 13. Место это, например, посередине 40 (плоскость III-III) между минимумом 16 и максимумом 17.
Каждому из ребер 13 поставлена в соответствие своя такая прямая 39, которые расположены под равным углом 15 между ребрами 13, точно также под этим углом 15 вокруг оси 2. Параллельное смещение осуществляется для различных ребер 13 соответственно вокруг направления, повернутого на угол 15. Профиль распорного тела 12 изменяется вдоль оси 2. Поперечные сечения распорного тела 12 в минимумах 16, середине 40 и максимумах 17 отличаются своей формой. Поперечные сечения не могут перекрываться при вращении вокруг оси 2. Поперечное сечение в середине 40, например, зеркально симметрично к оси симметрии 31. Поперечные сечения через минимумы 16 и максимумы 17, напротив, не имеют какой-либо зеркальной симметрии, однако могут быть выполнены зеркально симметрично друг другу.
Амплитуда тангенциального отклонения ребра 13 ограничена. Фиг.4 показывает наряду с поперечным сечением через максимум 17 поперечное сечение через минимум 16. В частности, не пересекаются никакие ребра 13. Амплитуда отклонения между соответственно двумя соседними экстремумами 16, 17, самое большее так велика, что перекрывающая поверхность 41 поперечного сечения ребра 13, в котором один из экстремумов 16, например минимум, и поперечного сечения одинакового ребра 13, в котором другой из экстремумов 17, например максимум, составляет, по меньшей мере, 25% поверхности поперечного сечения ребра 13. При хорошем приближении трапециевидного поперечного сечения ребер 13 амплитуда отклонения, т.е. расстояние от минимума 16 до максимума 17, меньше чем 75% ширины 26 ребра 13. Амплитуда по меньшей мере так велика, что перекрывающая поверхность 41 (перекрещивающаяся штриховка) поперечных сечений ребра 13 в минимуме 16 и максимуме 17 составляет меньше чем 75% поверхности поперечного сечения ребра 13. Амплитуда соответствует около 25% ширины 26 ребра 13.
Амплитуда, заданная в виде углового смещения 42 в и против окружного направления 18 между максимумами 17 и смежными минимумами 16, меньше чем 30° и предпочтительно больше чем 5°. Ребра 13 проходят в пределах первых участков 35 по меньшей мере на 5° и меньше, чем двенадцатая часть оборота в окружном направлении 18, чтобы в непосредственно примыкающем втором участке 36 пройти по меньшей мере на 5° против окружного направления 18. Оборот в противоположном направлении во втором участке 36 точно также ограничен двенадцатой частью оборота. Ходы 32 между ребрами 13 имеют проходящий прямолинейно вдоль оси 2 керн, который имеет угол 43 по меньшей мере 30°. Угловые размеры определяются предпочтительно на основе линии равных высот, на половине высоты 27 ребер 13.
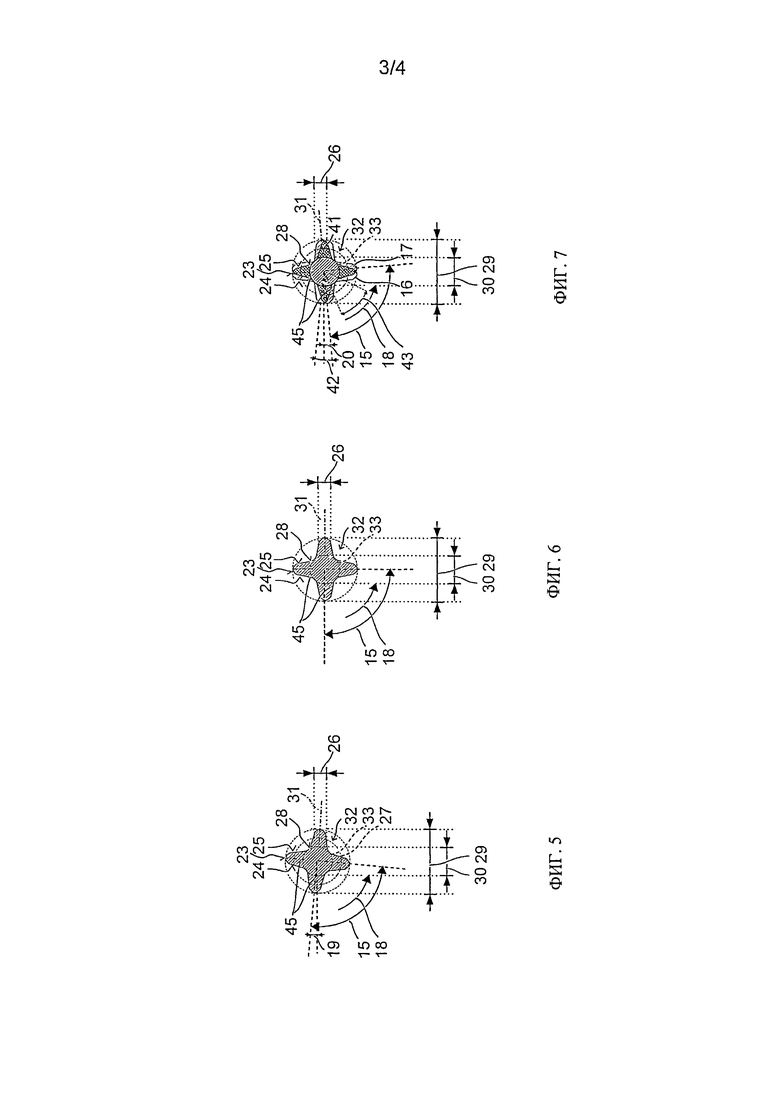
Фиг.5-7 показывают поперечные сечения распорного тела 12. На фиг.5 поперечное сечение проходит через минимум отклонения соответственно по плоскости II-II, на фиг.7 - через максимум отклонения соответственно по плоскости IV-IV и на фиг.6 - по плоскости посередине между минимумом и максимумом соответственно по плоскости III-III.
Распорный элемент 44 имеет несколько ребер 45, которые с распределением расположены вокруг оси 2. Вытянутые вдоль оси 2 ребра 45 являются волнообразными, причем осуществляется отклонение тангенциально к оси 2. Ребра 45 имеют соответственно сплошную первую боковую поверхность 24, которая смотрит только в окружном направлении 18, и сплошную вторую боковую поверхность 25, которая смотрит только против окружного направления 18. Обе боковые поверхности 24, 25 образуют поверхность ребра 45 и предпочтительно параллельны друг другу. Для других деталей ребер 45 делается ссылка на описание к фиг.2-4.
Ребро 45 закручено вокруг оси 2. Тангенциальное отклонение осуществляется с помощью вращения ребра 45 вокруг оси 2. Поперечные сечения перпендикулярно оси 2 распорного тела 12 имеют одинаковую форму; благодаря вращению они могут перекрываться. Поперечные сечения могут быть, например, зеркально симметричными к осям симметрии 31 ребер 45.
Амплитуда тангенциального отклонения ребра 45 ограничена. Фиг.7 показывает наряду с поперечным сечением через максимум 17 (заштриховано) поперечное сечение через минимум 16 (не заштриховано). Угловое смещение 42 между минимумом 16 и максимумом 17 меньше чем 30°. Предпочтительно угловое смещение 42 больше чем 5°. Предпочтительно угловое смещение 42 между всеми экстремумами равно по абсолютной величине (см. фиг.1).
Ширина 26 ребра 45 предпочтительно больше, чем угловое смещение 42. Ширина 26 ребра 45, выбрана, например, таким образом, что ребра 45 на половине высоты 27 закрывают между 90 и 150° обхода. В приведенном в качестве примера распорном теле 12 с четырьмя ребрами 45 ширина 26 лежит между 22,5 и 37,5°. Тангенциальное отклонение ограничено с адаптацией к ширине 46 ребер 45 в том отношении, что ребра 45 не пересекают друг друга.
Угол 34 между первой боковой поверхность 24 и осью 2 увеличивается в радиальном направлении к гребню 23.
Фиг.8 схематически показывает в качестве примера ручное обрабатывающее устройство, предназначенное для долбления, в частности перфоратор (бурильный молоток) 6. Перфоратор 6 имеет установочное устройство 47 для инструмента, в которое может устанавливаться хвостовик 9 долота 1. Первичный привод перфоратора 6 образует двигатель 48, который приводит в действие ударный механизм 49 и выходной вал 50. Пользователь может управлять перфоратором 6 с помощью рукоятки 51 и переводить перфоратор 6 в режим работы с помощью переключателя 52 режима работы. В режиме работы перфоратор 6 ударяет буровым долотом 53 в направлении 7 удара вдоль рабочей оси 54 в основу.
Ударный механизм 49 представлен, к примеру, пневматическим ударным механизмом 49. Генератор (возбудитель) 55 и ударник 5 установлены в ударном механизме 49 подвижно вдоль рабочей оси 54. Генератор 55 через эксцентрик 56 или осуществляющий биение благодаря перекосу палец присоединен к двигателю 48 и вынужден периодически линейно перемещаться. Пневматический упругий элемент, образованный пневматической камерой 57 между генератором 55 и ударником 5, объединяет перемещение ударника 5 с перемещением генератора 55. Ударник 5 может бить прямо по заднему концу долота 1 или посредством находящегося в основном в покое промежуточного ударника 58 часть своего импульса передавать буровому долоту 53. Ударный механизм 49 и предпочтительно другие компоненты привода расположены внутри корпуса 59 устройства.
Изобретение относится также к любым комбинациям предпочтительных форм осуществления, если они себя взаимно не исключают.
| название | год | авторы | номер документа |
|---|---|---|---|
| СОСУД С УЛУЧШЕННОЙ ХАРАКТЕРИСТИКОЙ НА ДЕЙСТВИЕ НАГРУЗКИ СВЕРХУ | 2003 |
|
RU2337863C2 |
| АНКЕР С ВОЛНИСТОЙ ГИЛЬЗОЙ | 2017 |
|
RU2740196C2 |
| РАСПОРНЫЙ АНКЕР | 2014 |
|
RU2675653C2 |
| СПОСОБ ИЗГОТОВЛЕНИЯ МЕТАЛЛИЧЕСКИХ ФАСОННЫХ ДЕТАЛЕЙ ИЗ ЛИСТОВОГО МЕТАЛЛА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1990 |
|
RU2018390C1 |
| ДЕРЖАТЕЛЬ ИЗОЛЯЦИОННОГО МАТЕРИАЛА | 2011 |
|
RU2575374C2 |
| БУРОВОЕ ДОЛОТО, ИМЕЮЩЕЕ ФАСОННЫЙ ПЕРЕДНИЙ РЕЗЕЦ И ИМПРЕГНИРОВАННЫЙ ВСПОМОГАТЕЛЬНЫЙ РЕЗЕЦ | 2018 |
|
RU2768347C2 |
| АНКЕРНЫЙ БОЛТ И СПОСОБ ИЗГОТОВЛЕНИЯ | 2012 |
|
RU2587395C2 |
| СОСКА ДЛЯ БУТЫЛОЧКИ ДЛЯ КОРМЛЕНИЯ ГРУДНОГО РЕБЕНКА | 2013 |
|
RU2635192C2 |
| ИНСТРУМЕНТ ДЛЯ СВЕРЛЕНИЯ ОТВЕРСТИЙ В СПЛОШНОМ МЕТАЛЛЕ | 1995 |
|
RU2147490C1 |
| РОТОРНЫЙ СМЕСИТЕЛЬ ДЛЯ ЖИДКИХ СРЕД | 2001 |
|
RU2186615C1 |


Изобретение относится к долоту. Долото имеет последовательно друг за другом на оси в направлении удара ударную поверхность, стержень, распорный элемент и острие. Распорный элемент содержит несколько проходящих вдоль оси ребер, которые расположены с распределением вокруг оси. При этом упомянутые ребра выполнены волнообразными с тангенциальным отклонением к оси. В результате уменьшается вероятность заклинивания долота при работе. 9 з.п. ф-лы, 8 ил.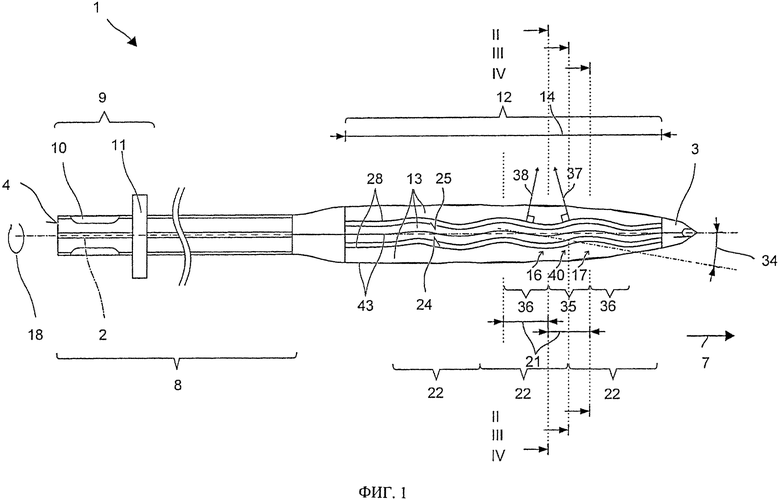
1. Долото (1), которое имеет последовательно друг за другом на оси (2) в направлении (7) удара ударную поверхность (4), стержень (8), распорный элемент (12) и острие (3), причем распорный элемент (12) содержит несколько проходящих вдоль оси (2) ребер (13, 45), которые расположены с распределением вокруг оси (2), и ребра (13, 45) соответственно выполнены волнообразными с тангенциальным отклонением к оси (2).
2. Долото (1) по п.1, отличающееся тем, что амплитуда (42) отклонения меньше, чем ширина (26) ребра (13, 45).
3. Долото (1) по п.2, отличающееся тем, что амплитуда (42) отклонения от участков ребра (13, 45), проходящих в окружном направлении (18), равна амплитуде (42) отклонения участков ребра (13, 45), проходящих против окружного направления (18).
4. Долото (1) по п.2, отличающееся тем, что амплитуда (42) отклонения лежит между 5 и 30°.
5. Долото (1) по п.1, отличающееся тем, что по меньшей мере одно из ребер (13) отклонено само по себе параллельно в окружном направлении (18) вокруг оси (2) благодаря тангенциальному волнообразному отклонению.
6. Долото (1) по п.5, отличающееся тем, что форма перпендикулярного к оси (2) поперечного сечения непрерывно изменяется вдоль оси (2).
7. Долото (1) по п.1, отличающееся тем, что по меньшей мере одно из ребер (45) повернуто в окружном направлении (18) вокруг оси (2) благодаря тангенциальному волнообразному отклонению.
8. Долото (1) по п.7, отличающееся тем, что поперечное сечение, перпендикулярное к оси (2) долота, выполнено с сохранением своей формы при повороте вдоль оси (2) попеременно в окружном направлении (18) и против окружного направления (18).
9. Долото (1) по п.1, отличающееся тем, что оно (1) имеет по меньшей мере два волновых цуга (22).
10. Долото (1) по одному из пп.1-9, отличающееся тем, что ребро (13, 45) по отношению к оси (2) отклонено на периодически изменяющийся вдоль оси (2) угол (34), причем наименьшее значение угла (34) лежит между -20 и -3°, а максимальное значение угла (34) лежит между 3 и 20°.
| WO 9740965 A1, 06.11.1997 | |||
| Переносное устройство для регулирования натяжения | 2019 |
|
RU2730596C2 |
| ПОРОДНЫЙ БУР ДЛЯ БУРЕНИЯ С ПРОМЫВКОЙ | 2002 |
|
RU2310056C2 |

