ОБЛАСТЬ ТЕХНИКИ
Изобретение относится к автоинъектору для введения дозы лекарственного вещества.
УРОВЕНЬ ТЕХНИКИ ИЗОБРЕТЕНИЯ
Введение инъекции – операция, связанная с множеством рисков и проблем для пользователей и медицинских работников как ментальных, так и физических.
Инъекционные устройства (т.е. устройства, способные доставлять лекарственные вещества из контейнера с лекарственным препаратом) обычно подразделяются на две категории - устройства с ручным управлением и автоинъекторы.
В устройстве с ручным управлением пользователь должен сообщить механическую энергию для перемещения текучей среды через иглу. Обычно это осуществляется с помощью некоторого вида кнопки/плунжера, которые пользователь должен непрерывно нажимать в процессе инъекции. При таком подходе пользователь испытывает множество неудобств. Если пользователь перестает оказывать давление на кнопку/плунжер, проведение инъекции также прекращается. Это означает, что пользователь может ввести недостаточную дозу, если устройство не используется должным образом (т.е. плунжер полностью не дожат в свое конечное положение). Усилия для проведения инъекции могут оказаться слишком большими для пользователя, особенно если пациент в преклонном возрасте или ограничен в движениях.
Кнопка/плунжер может выступать слишком далеко. Таким образом, пользователю может быть неудобным дотягиваться до полностью выступающей кнопки. Сочетание усилия для проведения инъекции и выступания кнопки может приводить к дрожанию/тряске руки, что, в свою очередь, повышает дискомфорт, поскольку введенная игла совершает движения.
Автоинъекторные устройства призваны облегчить пациентам самостоятельное проведение инъекций. Современные курсы лечения, проводимые с помощью самостоятельных инъекций, включают использование лекарственных препаратов для лечения диабета (как инсулина, так и более новых лекарственных препаратов класса GLP-1), мигрени, проведения гормональной терапии, введения антикоагулянтов и т.д. Автоинъекторы представляют собой устройства, которые полностью или частично заменяют действия, необходимые для парентерального введения лекарственного препарата из стандартных шприцов. Такие действия могут включать в себя снятие защитного колпачка шприца, введение иглы в кожу пациента, проведение инъекции лекарственного вещества, извлечение иглы, заключение иглы в защитный кожух и недопущение повторного использования устройства. Это устраняет множество недостатков устройств с ручным управлением. Усилия для проведения инъекции/выступание кнопки, дрожание рук и вероятность доставки неполной дозы снижаются. Спусковое действие может выполняться с помощью множества средств, например пусковой кнопки или действия иглы, достигшей своей глубины проведения инъекции. В некоторых устройствах энергия для доставки текучей среды обеспечивается пружиной.
В заявке США 2002/0095120 A1 раскрыто автоматическое инъекционное устройство, которое автоматически вводит заданное количество лекарственного препарата в виде текучей среды при разблокировании натяжной пружины. Натяжная пружина перемещает ампулу и инъекционную иглу из исходного положения в рабочее положение, когда она разблокирована. Затем содержимое ампулы выводится натяжной пружиной, заставляющей поршень переместиться вперед внутрь ампулы. После того как лекарственный препарат в виде текучей среды инъецирован, энергия кручения, запасенная в натяжной пружине, высвобождается, после чего инъекционная игла автоматически возвращается обратно в свое исходное положение.
Лекарственные вещества, обладающие высокой вязкостью, требуют больших усилий для вытеснения их через относительно тонкую инъекционную иглу. Чтобы развить такие усилия требуются мощные приводные пружины. Это может приводить к тому, что пользователь ощутит мощное ударное воздействие при введении иглы в кожу, а также к тому, что пользователь ощутит высокие силовые нагрузки при инициировании инъекции.
СУЩНОСТЬ ИЗОБРЕТЕНИЯ
Задача настоящего изобретения заключается в создании усовершенствованного автоинъектора.
Эта задача решается с помощью автоинъектора по пункту 1 формулы изобретения.
Предпочтительные варианты осуществления изобретения представлены в зависимых пунктах формулы изобретения.
В контексте настоящей заявки термин «проксимальный» относится к направлению в сторону пациента в ходе инъекции, в то время как термин «дистальный» относится к противоположному направлению, обращенному от пациента. Термин «внутрь» относится к радиальному направлению в сторону продольной оси автоинъектора, а термин «наружу» относится к противоположному направлению, радиально обращенному от продольной оси.
В одном примере варианта осуществления инъекционное устройство для введения дозы лекарственного вещества содержит корпус, имеющий проксимальный конец и дистальный конец, носитель, выполненный с возможностью размещения шприца, а также пусковую кнопку. В первом состоянии пусковая кнопка соединена с корпусом и/или носителем и упирается в дистальный конец корпуса. В промежуточном состоянии корпус перемещается проксимально относительно носителя и пусковой кнопки, при этом пусковая кнопка входит в зацепление с носителем. Во втором состоянии пусковая кнопка и носитель перемещаются проксимально относительно корпуса, при этом пусковая кнопка выходит из зацепления с носителем и входит в зацепление с корпусом.
В одном примере варианта осуществления пусковая кнопка включает в себя поддающуюся изгибу балку, выполненную с возможностью зацепления с корпусом и носителем. Корпус включает в себя фиксатор корпуса, выполненный с возможностью зацепления с балкой. Балка включает в себя первый наклонный элемент, выполненный с возможностью зацепления с фиксатором корпуса. Носитель включает в себя фиксатор носителя, выполненный с возможностью зацепления с балкой. Балка включает в себя второй наклонный элемент, выполненный с возможностью зацепления с фиксатором носителя. В первом состоянии балка входит в зацепление с фиксатором корпуса и/или фиксатором носителя. Во втором состоянии балка входит в зацепление с фиксатором корпуса, при этом балка упирается в носитель. В промежуточном состоянии балка входит в зацепление с фиксатором носителя, при этом балка упирается в корпус.
Дополнительная сфера применения настоящего изобретения станет понятна из подробного описания, приводимого ниже. Однако следует понимать, что подробное описание и конкретные примеры, указывающие предпочтительные варианты осуществления изобретения, приведены лишь в качестве иллюстрации, поскольку из этого подробного описания специалистам в данной области техники станут очевидны различные возможные изменения и модификации в объеме изобретения.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
Настоящее изобретение станет понятнее из нижеприведенного подробного описания и прилагаемых чертежей, представленных лишь в качестве иллюстрации, а значит не ограничивающих настоящего изобретения, где:
на фигуре 1 показаны два продольных разреза автоинъектора после снятия колпачка и защитного кожуха иглы,
на фигуре 2 показаны два продольных разреза автоинъектора, когда корпус перемещен в проксимальном направлении относительно рамы,
на фигуре 3 показаны два продольных разреза автоинъектора, когда пусковая кнопка нажата,
на фигуре 4 показаны два продольных разреза автоинъектора в процессе выдвижения иглы,
на фигуре 5 показаны два продольных разреза автоинъектора, когда игла находится в выдвинутом проксимальном положении,
на фигуре 6 показаны два продольных разреза автоинъектора в процессе доставки лекарственного вещества,
на фигуре 7 показаны два продольных разреза автоинъектора, когда пробка расположена вблизи проксимального конца шприца,
на фигуре 8 показаны два продольных разреза автоинъектора, когда корпус переместился в дистальном направлении относительно рамы после доставки лекарственного вещества,
на фигуре 9 показаны два продольных разреза автоинъектора, когда игла отведена в безопасное положение иглы,
на фигуре 10 показаны схематичные виды механизма фиксации для управления перемещением носителя относительно рамы автоинъектора в четырех различных состояниях,
на фигуре 11 показаны схематичные виды механизма управления выдвижением иглы для управления перемещением первой втулки в шести различных состояниях,
на фигуре 12 показаны схематичные виды механизма управления отвода шприца в трех различных состояниях
на фигуре 13 показаны схематичные виды механизма разблокирования обратной связи для обозначения конца инъекции в трех различных состояниях,
на фигуре 14 показаны схематичные виды механизма разблокирования плунжера в трех различных состояниях,
на фигуре 15 показаны схематичные виды механизма разблокирования кнопки в трех различных состояниях,
на фигуре 16 показан вид в изометрии альтернативного варианта осуществления механизма разблокирования плунжера,
на фигуре 17 показан продольный разрез альтернативного варианта осуществления механизма разблокирования кнопки,
на фигуре 18 показаны продольные разрезы альтернативного варианта осуществления механизма фиксации,
на фигуре 19 показан продольный разрез третьего варианта осуществления механизма фиксации,
на фигуре 20 показан продольный разрез альтернативного варианта осуществления механизма разблокирования обратной связи,
на фигуре 21 показаны продольные разрезы альтернативного варианта осуществления механизма управления выдвижением иглы, приспособленного также для выполнения функции механизма фиксации при отведении иглы и выдвижении иглы,
на фигуре 22 показан вид в изометрии механизма управления выдвижением иглы, представленного на Фигуре 21,
на фигуре 23 показаны продольные разрезы третьего варианта осуществления механизма управления выдвижением иглы, приспособленного также для выполнения функций механизма фиксации,
на фигуре 24 показан вид в изометрии механизм управления выдвижением иглы, представленного на Фигуре 23,
на фигуре 25 показаны продольные разрезы третьего варианта осуществления механизма разблокирования обратной связи,
на фигуре 26 показан другой вариант осуществления автоинъектора, имеющий охватывающую пусковую муфту вместо пусковой кнопки,
на фигуре 27 показан продольный разрез дистального конца автоинъектора с альтернативным механизмом разблокирования обратной связи до активации,
на фигуре 28 показан продольный разрез дистального конца автоинъектора с альтернативным механизмом разблокирования обратной связи, представленным на Фигуре 27, после деблокирования.
Аналогичные детали на всех Фигурах отмечены одинаковыми ссылочными позициями.
ПОДРОБНОЕ ОПИСАНИЕ ПРЕДПОЧТИТЕЛЬНЫХ ВАРИАНТОВ ОСУЩЕСТВЛЕНИЯ
Наклонное зацепление в настоящем описании следует понимать как зацепление между двумя компонентами, при котором, по меньшей мере, один из них имеет наклонный элемент для зацепления другого компонента так, что один из компонентов отгибается в сторону, когда компоненты аксиально оказывают давление друг на друга, при условии, что данный компонент не лишен возможности отгибаться в сторону.
На фигурах 1A и 1B показаны два продольных разреза автоинъектора 1 в различных плоскостях сечения, при этом плоскости сечения повернуты приблизительно на 90° относительно друг друга, сам же автоинъектор 1 пребывает в исходном состоянии до начала инъекции. Автоинъектор 1 содержит раму 2. В дальнейшем рама 2, в общем, рассматривается как закрепленная на месте, так что движение других компонентов описывается относительно рамы 2. Шприц 3, например шприц Hypak, имеющий полую инъекционную иглу 4, расположен в проксимальной части автоинъектора 1. Когда автоинъектор 1 или шприц 3 находится в собранном виде, на игле 4 закреплен защитный кожух иглы (не показан). Пробка 6 выполнена с возможностью герметизации шприца 3 в дистальном направлении и перемещения лекарственного вещества M через полую иглу 4. Шприц 3 удерживается в трубчатом носителе 7 и поддерживается в нем на его проксимальном конце. Носитель 7 расположен в раме 2 с возможностью скольжения.
Приводная пружина 8 в форме нажимной пружины расположена в дистальной части носителя 7. Плунжер 9 служит для передачи усилия приводной пружины 8 на пробку 6.
Приводная пружина 8 нагружена между дистальной торцевой поверхностью 10 носителя 7 и упорной поверхностью 11, расположенной дистально на плунжере 9.
Носитель 7 – основной элемент, в котором размещены шприц 3, приводная пружина 8 и плунжер 9, представляющие собой компоненты, необходимые для вытеснения лекарственного вещества M из шприца 3. Данные компоненты, таким образом, могут быть названы приводным подузлом.
Рама 2 и носитель 7 расположены в трубчатом корпусе 12. Пусковая кнопка 13 расположена на дистальном конце корпуса 12. В механизме 27 разблокирования плунжера от дистальной торцевой поверхности пусковой кнопки 13 выступает штырь 14 в проксимальном направлении P между двумя упругими консолями 15, образованными и продолжающимися дистально от упорной поверхности 11 плунжера 9 в пределах приводной пружины 8, не допуская, таким образом, их изгиба в направлении друг друга в исходном состоянии A, показанном на Фигуре 14A. На Фигуре 14A показана только одна из упругих консолей 15 для пояснения принципа. В наружном направлении упругие консоли 15 захвачены в соответствующих первых выемках 16 в дистальной втулке 17 носителя, прикрепленной дистально к дистальной торцевой поверхности 10 носителя и расположенной внутри приводной пружины 8. Зацепление упругих консолей 15 в первых выемках 16 не допускает аксиального поступательного перемещения плунжера 9 относительно носителя 7. Упругие консоли 15 оборудованы наклонным элементом так, чтобы выгибаться внутрь при относительном перемещении плунжера 9 и носителя 7 под нагрузкой со стороны приводной пружины 8, что не допускается штырем 14 в исходном состоянии A.
Носитель 7 заблокирован на раме 2 для предотвращения относительного поступательного перемещения с помощью механизма 18 фиксации, показанного подробнее на фигурах 10A-10D.
Пусковая кнопка 13 первоначально входит в зацепление с корпусом 12 с помощью механизма 26 разблокирования кнопки и ее невозможно нажать. Механизм 26 разблокирования кнопки подробно показан на Фигурах 15A-15C. Как показано на Фигуре 15A, механизм 26 разблокирования кнопки содержит упругую проксимальную балку 13.1 на пусковой кнопке 13, при этом проксимальная балка 13.1 имеет наружный первый наклонный элемент 13.2 и внутренний второй наклонный элемент 13.3. В первом состоянии A, показанном на Фигуре 15A, внутренний второй наклонный элемент 13.3 входит в зацепление с наклонным фиксатором 7.4 носителя 7, не допуская перемещения пусковой кнопки 13 за пределы дистального конца D. Пусковая кнопка 13 проксимально упирается в корпус 12 и/или носитель 7, а значит, не может быть нажата в проксимальном направлении P.
Как опять же показано на Фигурах 1A и 1B, регулировочная пружина 19 в форме другой нажимной пружины расположена вокруг носителя 7 и работает между проксимальной первой втулкой 20 и дистальной второй втулкой 21. Регулировочная пружина 19 используется для перемещения носителя 7, а значит и приводного подузла, в проксимальном направлении P для выдвижения иглы или в дистальном направлении D для отведения иглы. До наступления состояния, показанного на Фигурах 1A и 1B, колпачок 22 закреплен на проксимальном конце корпуса 12, а защитный кожух иглы по-прежнему находится на месте поверх иглы 4 и втулки иглы. Внутренняя оболочка 22.1 колпачка 22 расположена внутри рамы 2 поверх защитного кожуха иглы. Во внутренней оболочке 22.1 закреплен крючок 23. Крючок 23 входит в зацепление с защитным кожухом иглы для совместного аксиального поступательного перемещения.
Последовательность операций автоинъектора 1 следующая.
Пользователь стягивает колпачок 22 с проксимального конца корпуса 12. Крючок 23 соединяет защитный кожух иглы с колпачком 22. Следовательно, защитный кожух иглы также удаляется при снятии колпачка 22. На фигурах 1A и 1B показан автоинъектор 1, когда колпачок 22 и кожух иглы сняты. Носитель 7 и шприц 3 лишены возможности перемещаться в проксимальном направлении P механизмом 18 фиксации, пребывающем в состоянии A, показанном на Фигуре 10A. Как показано на Фигуре 10A, механизм 18 фиксации содержит упругую балку 2.1 на раме 2, имеющую выступающую внутрь первую головка 2.2 балки. Первая головка 2.2 балки имеет проксимальный третий наклонный элемент 2.3. Механизм 18 фиксации дополнительно содержит ромбовидное наклонное звено 7.1 на носителе 7, имеющее проксимальный четвертый наклонный элемент 7.2 и дистальный пятый наклонный элемент 7.3. В состоянии A закругленная дистальная сторона первой головки 2.2 балки упирается в наклонное звено 7.1 в дистальном направлении D, сопротивляясь перемещению носителя 7 в проксимальном направлении P относительно рамы 2. На корпусе 12 предусмотрено ребро для недопущения наружного изгиба упругой балки 2.1, а значит и недопущения перемещения носителя 7 относительно рамы 2.
Как опять же показано на фигурах 1A и 1B, пользователь захватывает корпус 12 и располагает раму 2, выступающую из корпуса 12 на проксимальном конце P, вплотную к участку инъекции, например к коже человека. Когда автоинъектор 1 поджат вплотную к участку инъекции, корпус 12 поступательно перемещается в проксимальном направлении P относительно рамы 2 в выдвинутое положение, показанное на фигурах 2A и 2B. Вторая втулка 21 зафиксирована на корпусе 12 и перемещается вместе с корпусом 12 относительно рамы 2, а также относительно почти всех остальных компонентов автоинъектора 1, тем самым незначительно поджимая регулировочную пружину 19 к первой втулке 20, движение которой в проксимальном направлении P не допускается рамой 2 вследствие того, что механизм 24 регулировки выдвижения иглы пребывает в состоянии A, подробно показанном на фигуре 11A. Как показано на фигуре 11A, на первой втулке 20 проксимально расположено упругое звено в форме наконечника 20.1 стрелы. Первая втулка 20, имеющая наконечник 20.1 стрелы, проталкивается в проксимальном направлении P под нагрузкой со стороны сжатой регулировочной пружины 19. Наружный шестой наклонный элемент 20.2 на наконечнике 20.1 стрелы взаимодействует со вторым по счету дистальным седьмым наклонным элементом 2.4 на раме 2, наклоняя наконечник 20.1 стрелы во внутреннем направлении I, что не допускается вследствие того, что наконечник 20.1 стрелы упирается во внутреннем направлении в носитель 7. Следовательно, первая втулка 20 не может поступательно переместиться в проксимальном направлении P.
Наконечник 20.1 стрелы может иметь иную геометрию, чем на фигурах 11A-11F, например закругленный наконечник 20.1 стрелы, как на фигурах 1-9. Данный вариант не затрагивает функционирования наконечника 20.1 стрелы.
Как опять же показано на фигурах 2A и 2B, вторая втулка 21 зафиксирована на корпусе благодаря тому, что механизм 25 регулирования отведения шприца пребывает в состоянии A, подробно показанном на Фигуре 12A. Как показано на фигуре 12A, механизм 25 регулирования отведения шприца содержит упругую проксимальную балку 21.1 на второй втулке 21, при этом проксимальная балка 21.1 имеет вторую головку 21.2, обладающую внутренним выступом 21.3 и дистальным наружным восьмым наклонным элементом 21.4. Дистальный наружный восьмой наклонный элемент 21.4 входит в зацепление с наклонным вторым фиксатором 12.2 корпуса, так чтобы наклонить вторую головку 21.1 балки во внутреннем направлении I, когда вторая втулка 21 находится под нагрузкой со стороны регулировочной пружины 19 в дистальном направлении D, что не допускается вследствие того, что внутренний выступ 21.3 упирается во внутреннем направлении в носитель 7.
Как опять же показано на фигурах 2A и 2B, если пользователь перемещает корпус 12 от участка инъекции, регулировочная пружина 19 расширяется, возвращая автоинъектор 1 в исходное состояние, имеющее место после снятия колпачка 22, показанное на фигурах 1A и 1B.
В состоянии, показанном на фигурах 2A и 2B, носитель 7 по-прежнему лишен возможности перемещаться в проксимальном направлении P механизмом 18 фиксации, однако когда корпус 12 пребывает в своем выдвинутом положении, механизм 18 фиксации разблокирован, поскольку ребро на корпусе 12 также переместилось и более не препятствует наружному изгибу упругой балки 2.1. Перемещение корпуса 12 относительно носителя 7, который заблокирован на раме 2 механизмом 18 фиксации, заставляет механизм 26 разблокирования кнопки переключиться в промежуточное состояние B, показанное на фигуре 15B. Когда корпус 12 перемещается, пусковая кнопка 13 продолжает упираться в носитель 7, при этом внутренний второй наклонный элемент 13.3 на проксимальной балке 13.1 находится в зацеплении с наклонным фиксатором 7.4 носителя, расположенным на носителе 7. Когда корпус 12 поступательно перемещается далее в проксимальном направлении P, он служит опорой проксимальной балке 13.1 в наружном направлении, тем самым блокируя пусковую кнопку 13 на носителе 7. Пусковая кнопка 13 теперь выступает из дистального конца D корпуса 12 и готова к нажатию.
В состоянии, показанном на фигурах 2A и 2B, пользователь нажимает пусковую кнопку 13 в проксимальном направлении P. Поскольку пусковая кнопка 13 упирается в носитель 7, носитель 7 проталкивается в проксимальном направлении P относительно рамы 2, при этом носитель 7 и рама 2 взаимодействуют в механизме 18 фиксации. Усилие, оказываемое пользователем, нажимающим на пусковую кнопку 13, распределяется через раму 2 на участок инъекции, а не между пусковой кнопкой 13 и корпусом 12. Механизм 18 фиксации создает усилие сопротивления, когда пользователь проталкивает пусковую кнопку 13. Как только пользователь прикладывает усилие, превышающее заданную величину, механизм 18 фиксации деблокируется, запуская цикл инъекции. Как показано на фигуре 10B, где представлен механизм 18 фиксации в состоянии B, упругая балка 2.1 на раме 2 начинает выгибаться под нагрузкой со стороны ромбовидного наклонного звена 7.1 на носителе 7, запасая энергию упругой деформации. Несмотря на наличие проксимального четвертого наклонного элемента 7.2 на наклонном звене 7.1, трение между соприкасающимися поверхностями первой головки 2.2 балки и проксимального четвертого наклонного элемента 7.2 не допускает перемещения первой головки 2.2 балки в наружном направлении O, пока выпрямляющая сила в упругодеформированной балке 2.1 не станет достаточно большой, чтобы его преодолеть. В этот момент упругая балка 2.1 выгибается в наружном направлении O, уходя с пути носителя 7, тем самым позволяя носителю 7 поступательно перемещаться в проксимальном направлении P. Когда носитель 7 перемещается достаточно далеко в проксимальном направлении P, ромбовидное наклонное звено 7.1 на носителе 7 проходит под первой головкой 2.2 балки, тем самым позволяя ей срелаксировать и переместиться назад во внутреннем направлении I дистально позади ромбовидного наклонного звена 7.1 в состоянии C, показанном на Фигуре 10C, одновременно сдерживая поступательное перемещение носителя 7 в дистальном направлении D относительно рамы 2.
Когда носитель 7 проскальзывает достаточно далеко в проксимальном направлении P относительно первой втулки 20, механизм 24 регулировки выдвижения иглы переключается в состояние B, показанное на фигуре 11B. На фигуре 11B носитель 7 поступательно переместился в проксимальном направлении P так, что наконечник 20.1 стрелы на первой втулке 20 более не имеет опоры во внутреннем направлении. Это может достигаться с помощью второй выемки 7.5 на носителе 7. Наконечник 20.1 стрелы теперь смещен во внутреннем направлении I во вторую выемку 7.5 под нагрузкой со стороны регулировочной пружины 19, переходя в состояние C, показанное на фигуре 11 C. Первая втулка 20 теперь отсоединена от рамы 2. Вместо этого наконечник 20.1 стрелы соединяет первую втулку 20 с носителем 7 с помощью внутреннего девятого наклонного элемента 20.3, входящего в зацепление с дистальным десятым наклонным элементом 7.6 на носителе 7 на проксимальном конце второй выемки 7.5. Следовательно, регулировочная пружина 19 продолжает перемещать носитель 7 в проксимальном направлении P с этого момента. Между тем как пользователь продвигает иглу 4 на часть ее пути, регулировочная пружина 19 принимает на себя введение до того как игла 4 выступает из проксимального конца P. Таким образом, пользователь испытывает ощущение нажатия на кнопку, а не введения иглы вручную.
Механизм 18 фиксации рассчитан на приложение пользователем усилия, а не на смещение. Когда усилие превышает усилие, необходимое для коммутации фиксатора, пользователь будет нажимать на пусковую кнопку 13 в полной мере, гарантируя, что первая втулка 20 будет всегда находиться в состоянии коммутации. Если пользователь не сможет пройти фиксатор, пусковая кнопка 13 возвращается в свое «неиспользованное» состояние, готовая к использованию, как показано на фигурах 2A и 2B. Эта особенность позволяет избежать пребывания автоинъектора 1 в неопределенном состоянии.
На фигурах 3A и 3B показан автоинъектор 1, когда пусковая кнопка 13 нажата в достаточной степени для соединения регулировочной пружины 19 с носителем 7 и продолжения перемещения носителя 7 вперед, но еще до упора в корпус 12.
Носитель 7, соединенный с первой втулкой 20, поступательно перемещается в проксимальном направлении P, приводимый в движение регулировочной пружиной 19. Поскольку шприц 3 выполнен с возможностью совместного аксиального поступательного перемещения с носителем 7, шприц 3 и игла 4 также поступательно перемещаются, в результате чего игла 4 выступает из проксимального конца P и вводится в участок инъекции. Пусковая кнопка 13 возвращается в свое начальное положение относительно корпуса 12, вследствие чего проксимальная балка 13.1 выгибается в наружном направлении O благодаря тому, что внутренний второй наклонный элемент 13.3 входит в зацепление с наклонным элементом в фиксаторе 7.4 носителя, а значит, проксимальная балка 13.1 отклоняется в первый фиксатор 12.1 корпуса и закрепляется к корпусу 12, переходя от носителя 7. Носитель 7 поступательно перемещается далее в проксимальном направлении P, не допуская внутреннего отклонения проксимальной балки 13.1, так что наружный первый наклонный элемент 13.2 не может выйти из зацепления с первым фиксатором 12.1 корпуса.
Непосредственно перед тем, как игла 4 достигает полной глубины введения, как показано на фигурах 4A и 4B, штырь 14 на пусковой кнопке 13 выводится из пространства между упругими консолями 15 на носителе 7 в достаточной степени, чтобы обеспечить внутренний изгиб упругих консолей 15. Следовательно, механизм 27 разблокирования плунжера переходит в состояние B, показанное на фигуре 14B, в котором упругие консоли 15 более не поддерживаются во внутреннем направлении штырем 14. Вследствие наклонного зацепления упругих консолей 15 в первой выемке 16 они отклоняются во внутреннем направлении I под нагрузкой со стороны приводной пружины 8, переходя в состояние C, показанное на фигуре 14C. Следовательно, плунжер 9 высвобождается из носителя 7 и приводится в движение в проксимальном направлении P приводной пружиной 8, готовый к вытеснению лекарственного вещества M. Усилие для выведения штыря 14 из пространства между упругими консолями 15 создается регулировочной пружиной 19, в то время как усилие, необходимое для отклонения упругих консолей 15 для расцепления с носителем 7, обеспечивается приводной пружиной 8.
В то время как плунжер 9 перемещается и устраняет зазор с пробкой 6, перемещение носителя 7 в проксимальном направлении P завершается регулировочной пружиной 19, проталкивающей первую втулку 20. Когда носитель 7 перемещается относительно рамы 2 в процессе выдвижения иглы, механизм 24 выдвижения иглы переходит в состояние D, показанное на фигуре 11D. Наконечник 20.1 стрелы переместился вместе с носителем 7 и по-прежнему удерживается отклоненным во внутреннем направлении рамой 2, тем самым не допуская отцепления первой втулки 20 от носителя 7. Наконечник 20.1 стрелы должен обладать возможностью отклонения в наружном направлении O, чтобы обеспечить отвод, как будет показано ниже. С целью обеспечения наружного отклонения наконечник 20.1 стрелы перемещается проксимально за часть рамы 2, показанную на Фигурах 11A - 11F рядом с отверстием 2.5 в раме 2. Однако до тех пор, пока корпус 12 остается поджатым к участку инъекции и не имеет возможности вернуться в дистальном направлении D за пределы заданного расстояния под нагрузкой со стороны регулировочной пружины 19, наконечник 20.1 стрелы будет удерживаться от отклонения в наружном направлении O первым ребром 12.3 на корпусе 12 (на фигурах 11A-11F не показано, см. фигуры 4A-7A) в ходе примерно второй половины своего перемещения для выдвижения иглы.
Игла 4 теперь полностью введена в участок инъекции, как показано на фигурах 5A и 5B. Отрезок времени между нажатием пусковой кнопки 13 и полным введением иглы 4 очень короток, однако в это время осуществляется несколько механических операций. Глубина выдвижения иглы определяется носителем 7 относительно рамы 2, но не относительно корпуса 12, так что если пользователь отдернет руку или не сможет удерживать автоинъектор 1 плотно прижатым к коже, в дистальном направлении D переместится только корпус 12, в то время как глубина инъекции останется постоянной. Как только плунжер 9 устраняет зазор с пробкой 6 под силовым воздействием приводной пружины 8, пробка 6 проталкивается в проксимальном направлении P в пределах шприца 3, перемещая лекарственное вещество M через иглу 4.
Непосредственно перед завершением вытеснения лекарственного вещества, когда пробка 6 практически достигла дна в шприце 3, как показано на фигурах 6A и 6B, деблокируется компонент 28 обратной связи. Наложение допусков, главным образом связанных со шприцом 3, требует, чтобы обратная связь всегда деблокировалась перед полным выведением лекарственного вещества. В противном случае при определенных сочетаниях деталей обратная связь не всегда будет деблокирована. Компонент 28 обратной связи содержит удлиненный участок 28.1, расположенный между упругими консолями 15 на плунжере 9, а также дистальный концевой участок 28.2, выполненный с возможностью упора в проксимальный выступ 14.1 на штыре 14 пусковой кнопки 13. Вторые упругие консоли 30 начинаются от плунжера 9 и продолжаются в дистальном направлении D. Пружина 29 обратной связи выполнена с возможностью смещения компонента 28 обратной связи в дистальном направлении D относительно плунжера 9 путем упора в проксимальном направлении в ребро на плунжере 9, a в дистальном направлении - в дистальный концевой участок 28.2 компонента 28 обратной связи.
Следует отметить, что компонент 28 обратной связи для простоты не показан на фигурах 15A, 15B и 15C, поскольку не влияет на работу механизма 26 разблокирования кнопки. Механизм 31 разблокирования обратной связи, предназначенный для деблокирования компонента 28 обратной связи, схематично показан на Фигурах 13A, 13B и 13C. Как показано на фигуре 13A, механизм 31 разблокирования обратной связи содержит вторые упругие консоли 30. На каждой из вторых упругих консолей 30 расположен наклонный внутренний выступ 30.1, который входит в зацепление с соответствующим наружным одиннадцатым наклонным элементом 28.3 на удлиненном участке 28.1 компонента 28 обратной связи так, что вторая упругая консоль 30 отклоняется в наружном направлении O под нагрузкой со стороны пружины 29 обратной связи. В исходном состоянии A механизма 31 разблокирования обратной связи вторые упругие консоли 30 не имеют возможности отклоняться в наружном направлении благодаря упору в носителя 7, не допуская, таким образом, поступательного перемещения компонента 28 обратной связи относительно плунжера 9. Следовательно, компонент 28 обратной связи перемещается вместе с плунжером 9 и остается в состоянии A непосредственно вплоть до полного вытеснения лекарственного вещества пробкой 6, практически достигшей дна в шприце 3, как показано на фигурах 6A и 6B. В этот момент плунжер 9 поступательно переместился в проксимальном направлении P относительно носителя 7 до такой степени, что вторые упругие консоли 30 достигают отверстия 7.22 на носителе 7, так что они более не имеют опоры в наружном направлении со стороны носителя 7. Механизм 31 разблокирования обратной связи, таким образом, достиг состояния B, которое показано на фигуре 13B. Благодаря наклонному зацеплению между наклонным внутренним выступом 30.1 и наружным одиннадцатым наклонным элементом 28.3 вторая упругая консоль 30 выгибается в наружном направлении под нагрузкой со стороны пружины 29 обратной связи, тем самым отцепляя компонент 28 обратной связи от плунжера 9 и позволяя компоненту 28 обратной связи перемещаться в дистальном направлении D под воздействием пружины 29 обратной связи в состоянии C, показанном на фигуре 13C. Следовательно, компонент 28 обратной связи ускоряется в дистальном направлении D, при этом дистальный концевой участок 28.2 ударяется о проксимальный выступ 14.1 штыря 14 на пусковой кнопке 13, порождая акустическую и тактильную обратную связь для пользователя, свидетельствующую о том, что доставка лекарственного вещества практически закончилась (сравни с фигурами 7A и 7B).
На фигурах 7A и 7B показан автоинъектор 1, когда пробка 6 полностью достигла дна шприца 3.
Как говорилось выше, пользователь может позволить корпусу 12 переместиться на несколько миллиметров в дистальном направлении D под силовым воздействием регулировочной пружины 19, не оказывая влияния на положение иглы 4, пока это перемещение составляет менее заданного расстояния. Если пользователь пожелает закончить инъекцию в любой момент времени, он должен позволить корпусу 12 переместиться в дистальном направлении D свыше этого расстояния. На фигурах 8A и 8B показан автоинъектор 1 с выступающей рамой, например, после поднятия с участка инъекции, когда корпус 12 полностью переместился в дистальном направлении D, так что рама 2 выступает из проксимального конца корпуса 12. По мере перемещения корпуса 12 первая втулка 20 деблокирует носитель 7, а затем вторая втулка 21 высвобождается из корпуса 12 и тянет носитель 7 в дистальном направлении D. Последовательность данного переключения принципиально важна, поскольку отвод не произойдет, если обе втулки 20, 21 крепятся к носителю 7 одновременно. Эта проблема решается с помощью разделения переключения втулок 20, 21 путем существенного смещения корпуса 12.
Переключение первой втулки 20 показано на Фигурах 11E и 11F. На фигуре 11E корпус 12 получил возможность переместиться в дистальном направлении D под нагрузкой со стороны регулировочной пружины 19, например, в процессе удаления автоинъектора 1 с участка инъекции. Первое ребро 12.3 (не показано, см. фигуру 8A) удалено позади наконечника 20.1 стрелы. Первая втулка 20 по-прежнему проталкивается в проксимальном направлении P регулировочной пружиной 19. Вследствие зацепления внутреннего девятого наклонного элемента 20.3 на наконечнике 20.1 стрелы с дистальным десятым наклонным элементом 7.6 на носителе 7 наконечник 20.1 стрелы отклоняется в наружном направлении O в отверстие 2.5 рамы 2 (показано на фигурах 11A-11F), при этом механизм 24 регулировки выдвижения иглы переходит в состояние E, показанное на фигуре 11E, отсоединяя первую втулку 20 от носителя 7 и фиксируя ее на раме 2.
По мере того как корпус 12 перемещается далее в дистальном направлении D относительно рамы, например при удалении с участка инъекции, механизм 25 регулирования отведения шприца переходит из своего состояния A (сравни с Фигурой 12A) в состояние B, показанное на фигуре 12B. Корпус 12 и вторая втулка 21, зафиксированная на корпусе 12, совместно перемещаются в дистальном направлении D, в то время как носитель 7 удерживается на месте механизмом 18 фиксации в его состоянии C, как описано выше (сравни с фигурой 10C). Вследствие этого перемещения внутренний выступ 21.3 на второй головке 21.2 проксимальной балки 21.1 на второй втулке 21 более не упирается во внутреннем направлении в носитель 7. Вместо этого внутренний выступ 21.3 отклоняется во внутреннем направлении I в третью выемку 7.7 на носителе 7 вследствие наклонного зацепления второй головки 21.1 балки с наклонным вторым фиксатором 12.2 корпуса под нагрузкой со стороны регулировочной пружины 19. Механизм 25 регулирования отведения шприца, таким образом, переходит в состояние C, показанное на фигуре 12C, в котором вторая втулка 21 отсоединена от корпуса 12 и соединена с носителем 7. Механизм 18 фиксации прикладывает небольшое тормозное усилие при перемещении носителя 7, перед тем как механизм 25 регулирования отведения шприца переключается в состояние C, поскольку существует небольшая сила трения скольжения, прикладываемая второй втулкой 21, подтягивающая носитель 7 в дистальном направлении D при поступательном перемещении корпуса 12 в дистальном направлении D, когда механизм 24 регулировки выдвижения иглы уже переведен в состояние E. Если носитель 7 перемещается слишком далеко в дистальном направлении D до того как вторая втулка 21 совершает переключение, корпус 12 заканчивает перемещение перед тем как внутренний выступ 21.3 может отклониться в третью выемку 7.7, не допуская отвода.
Начиная от положения C механизма 18 фиксации (сравни с фиг.10C), носитель 7, а значит и ромбовидное наклонное звено 7.1, поступательно перемещаются в дистальном направлении D под нагрузкой со стороны регулировочной пружины 19. Следовательно, дистальный пятый наклонный элемент 7.3 ромбовидного наклонного звена 7.1 входит в зацепление с проксимальным третьим наклонным элементом 2.3 на первой головке 2.2 упругой балки 2.1, чтобы отклонить упругую балку 2.1 во внутреннем направлении I. Это создает небольшое тормозное усилие при перемещении носителя 7, необходимое для обеспечения переключения второй втулки 21 на носитель 7. Упругая балка 2.1 и ромбовидное наклонное звено 7.1 смещены в боковом направлении, чтобы позволить упругой балке 2.1 пройти, не соприкасаясь с ромбовидным наклонным звеном 7.1, как только первая головка 2.2 балки находится полностью с внутренней стороны от наклонного звена 7.1 в состоянии D, показанном на фигуре 10D.
Регулировочная пружина 19 установлена на своем проксимальном конце в корпусе посредством того, что первая втулка 20 упирается в раму 2. Дистальный конец регулировочной пружины 19 перемещает вторую втулку 21 в дистальном направлении D, захватывая вместе с ней носитель 7, а значит и шприц 3 с иглой 4, преодолевая действие механизма 18 фиксации, как показано на фигуре 10D. Следует отметить, что игла 4 отводится автоинъектором 1, как только пользователь позволяет корпусу 12 поступательно переместиться достаточно далеко, в противоположность автоинъекторам с защитным кожухом иглы, требующим от пользователя удалить автоинъектор с участка инъекции, тем самым самостоятельно извлекая иглу из кожи, чтобы позволить защитному кожуху иглы продвинуться вперед.
Следует отметить, что перед отводом протяженность пространства между ребром на плунжере 9 и дистальным концевым участком 28.2 компонента 28 обратной связи, где установлена пружина 29 обратной связи, превышает свободную длину пружины 29 обратной связи. Это означает, что когда носитель 7 отводится (т.е. уменьшается расстояние между плунжером 9 и компонентом 28 обратной связи), пружина 29 обратной связи не требует повторного сжатия, а значит, не создает никакого тормозного усилия.
Чтобы предотвратить дребезжание компонента 28 обратной связи в конце выдачи дозы и перед отводом, можно попытаться сделать свободную длину пружины 29 обратной связи равной протяженности пространства между ребром на плунжере 9 и дистальным концевым участком 28.2 компонента 28 обратной связи. В этом случае в процессе отвода пружина 29 обратной связи потребует повторного сжатия, что снижает усилие, управляющее финальной частью отвода. Однако пружина 29 обратной связи имеет очень низкую скорость и по расчетам удовлетворяет допустимым пределам для надежного отвода.
Отвод завершается, когда дистальная втулка 21 встречается с первым задним упором 12.4 на корпусе 12, как показано на фигурах 9A и 9B. Наконечник 20.1 стрелы на первой втулке 20 с внутренней стороны упирается в носитель 7 в состоянии F, показанном на Фигуре 11F, а значит, не имеет возможности отклоняться во внутреннем направлении I. Наружный шестой наклонный элемент 20.2 наконечника 20.1 стрелы входит в зацепление позади первого ребра 12.3 на корпусе 12, не допуская повторного проталкивания корпуса 12 в проксимальном направлении P. Между наконечником 20.1 стрелы и первым ребром 12.3 может быть создан зазор с учетом допусков.
Механизм 18 фиксации возвращается в состояние A, показанное на фигуре 10A, блокируя носитель 7 в том же положении относительно рамы 2, как и первоначально, однако теперь он не может быть разблокирован, поскольку корпус 12 не может перемещаться относительно рамы 2.
Метка 20.4 на первой втулке 20 теперь видна через индикаторное окно 32 в корпусе 12, указывая на то, что автоинъектор 1 использован.
На фигуре 16 показан вид в изометрии альтернативного варианта осуществления механизма 27 разблокирования плунжера. Механизм 27 разблокирования плунжера не допускает перемещения плунжера 9 в проксимальном направлении P относительно носителя 7, пока носитель 7 не переместится в проксимальном направлении P для выдвижения иглы. В противоположность механизму 27 разблокирования плунжера, представленному на фигуре 14, где для разблокирования плунжера 9 используется относительное перемещение носителя 7 и пусковой кнопки 13, в альтернативном варианте осуществления, показанном на Фигуре 16, плунжер 9 деблокируется перемещением носителя 7 относительно второй втулки 21. На Фигуре 16 показан механизм 27 разблокирования плунжера до того как плунжер разблокирован. Вторая втулка 21 показана как прозрачная, чтобы упростить понимание. Плунжер 9 проталкивается в проксимальном направлении P приводной пружиной 8. Чтобы плунжер 9 продвинулся вперед, он должен совершить поворот вокруг двенадцатого наклонного элемента 7.8 на носителе 7. Наклонное звено 9.1 на плунжере 9 выполнено с возможностью зацепления с этим двенадцатым наклонным элементом 7.8. Поворот наклонного звена 9.1 заблокирован внутренним продольным ребром 21.5 на второй втулке 21, выполненным в виде шлица в продольном отверстии 7.9 на носителе 7. Корпус 12 и вторая втулка 21 остаются в том же положении, т.е. соединенными друг с другом для совместного аксиального поступательного перемещения. При нажатии пусковой кнопки 13 носитель 13 и плунжер 9, являясь частью приводного подузла, перемещаются в проксимальном направлении P, сначала благодаря нажатию пользователем пусковая кнопка 13, а затем регулировочной пружиной 19, принимающей на себя эту функцию посредством первой втулки 20, как описано выше. После того как носитель 7 перемещается достаточно далеко в проксимальном направлении P относительно второй втулки 21, наклонное звено 9.1 на втулке 9 освобождается от продольного ребра 21.5 на второй втулке 21 и может совершать поворот за проксимальным концом продольного ребра 21.5 вследствие наклонного зацепления с двенадцатым наклонным элементом 7.8 под нагрузкой со стороны приводной пружины 8. Следовательно, приводная пружина 8 продвигает плунжер 9 в проксимальном направлении P для вытеснения лекарственного вещества M.
На фигуре 17 показан продольный разрез альтернативного варианта осуществления механизма 26 разблокирования кнопки. В отличие от механизма 26 разблокирования кнопки по фигуре 15, создающего видимость появления пусковой кнопки 13 при наличии контакта с кожей путем переключения основания пусковой кнопки 13 между носителем 7 и корпусом 12, механизм 26 разблокирования кнопки, представленный на фигуре 17, начинает работу с того, что пусковая кнопка 13 заблокирована, но выступает из дистального конца корпуса 12. Когда носитель 7 переместился в дистальном направлении D при соприкосновении рамы 2 с кожей, имеется возможность нажать на пусковую кнопку 13 и активировать автоинъектор 1. Это обеспечивает последовательное выполнение действий.
В варианте осуществления, показанном на фигуре 17, пусковая кнопка 13 имеет две проксимальные балки 13.1, на каждой из которых имеется наклонный наружный выступ 13.4. В исходном состоянии, показанном на фигуре 17, наклонные наружные выступы 13.4 находятся в зацеплении с соответствующими четвертыми выемками 12.5 в корпусе 12. Отцепление наклонных наружных выступов 13.4 от четвертых выемок 12.5 не допускается благодаря тому, что носитель 7 служит опорой проксимальным балкам 13.1 во внутреннем направлении, не позволяя проксимальным балкам 13.1 отклониться внутрь. Внутренние выступы 13.5 на проксимальных балках 13.1 упираются во второе ребро 7.10 на носителе 7, не допуская дальнейшего перемещения носителя 7 в проксимальном направлении P в исходном состоянии. После того как носитель 7 переместился в дистальном направлении D при соприкосновении рамы 2 с кожей, первое окно 7.11 на носителе 7 перемещается за внутренний выступ 13.5, позволяя проксимальным балкам 13.1 при нажатии кнопки 13 отклониться внутрь благодаря их наклонному зацеплению в четвертых выемках 12.5. Теперь проксимальные балки 13.1 в наружном направлении упираются в корпус 12 и остаются в зацеплении с носителем 7 даже при отводе иглы 4. Пусковая кнопка 13, таким образом, не возвращается в свое начальное положение, указывая на то, что автоинъектор 1 использован.
На Фигурах 18A и 18B показаны два продольных разреза альтернативного варианта осуществления механизма 18 фиксации. Механизм 18 фиксации, показанный на фигурах 10A-10D, который можно назвать механизмом "беговой дорожки", поскольку первая головка 2.2 балки перемещается по ромбовидному наклонному звену 7.1, выполняет множество функций, управляющих перемещением носителя 7 относительно рамы 2. В альтернативном механизме 18 фиксации, показанном на Фигурах 18A и 18B, используются три зажима 7.12, 7.13, 2.6 для создания того же эффекта.
Первый зажим 7.12 расположен в виде смещенной в наружном направлении упругой балки на носителе 7, продолжающейся от носителя 7 в проксимальном направлении P. Первый зажим 7.12 выполнен с возможностью недопущения перемещения носителя 7 до того как на раму 2 будет оказано давление или, точнее, корпус 12 поступательно переместится при соприкосновении с кожей. Первый зажим 7.12 состоит из двух секций, расположенных в ряд. Первая секция 7.14 не допускает перемещения носителя 7 в проксимальном направлении P путем упора в раму 2 в выемке. Вторая секция 7.15 расположена в виде выступающей в наружном направлении головки зажима, выполненной с возможностью наклона внутрь наклонным элементом 12.6 на раме 12 для разблокирования первого зажима 7.12, а значит освобождения носителя 7 от рамы 2, когда корпус 12 поступательно перемещается в проксимальном направлении P при соприкосновении с кожей. В раме 2 расположен продольный паз 2.7, чтобы позволить второй секции 7.15 скользить в проксимальном направлении P после того как блокировка снята. Незначительная сила трения между первым зажимом 7.12 и рамой 2 создает тормозное усилие, необходимое для обеспечения отвода.
Второй зажим 7.13 расположен в виде упругой балки на носителе 7, продолжающейся в дистальном направлении D, которая имеет выступающую в наружном направлении третью головку 7.16 балки с проксимальным наклонным элементом. Третья головка 7.16 балки служит в качестве заднего упора в третье ребро 2.9 на раме 2, чтобы не допустить перемещения носителя 7 в дистальном направлении D из своего начального положения. Носитель 7 и рама 2 находятся в сборе со вторым зажимом 7.13 в этом положении до введения шприца 3 в носитель 7, чему способствует проксимальный наклонный элемент на третьей головке 7.16 балки. Шприц 3 фиксирует зажим на месте путем недопущения отклонения внутрь, образуя тем самым фиксированный упор.
Третий зажим 2.6 представляет собой упругую балку на раме 2. продолжающуюся в дистальном направлении D. Наклонная четвертая головка 2.8 балки на третьем зажиме 2.6 выполнена с возможностью вхождения в зацепление во внутреннем направлении в пятую выемку 7.17 на носителе 7. Когда первый зажим 7.12 разблокирован, пользователь может приложить нагрузку к третьему зажиму 2.6 путем оказания давления на носитель 7 в проксимальном направлении P при нажатии пусковой кнопки 13. Третий зажим 2.6 подвергается нагрузке на сжатие, т.е. он выгибается наружу и резко высвобождается благодаря своему наклонному зацеплению с носителем 7, обеспечивая функцию фиксатора по аналогии с тем, что показано на фигуре 10B.
На фигуре 19 показан продольный разрез третьего варианта осуществления механизма 18 фиксации, являющегося разновидностью варианта осуществления, представленного на фигурах 18A и 18B. В данном варианте осуществления функция фиксатора третьего зажима 2.6 добавлена первому зажиму 7.12. Блокировка между корпусом 12 и носителем 7 снимается тем же способом, однако фиксатор создается вследствие того, что первый зажим 7.12 отклоняется внутрь до второго уровня благодаря тому, что рама 2 не имеет паза 2.7 для второй секции 7.15. Вместо этого вторая секция 7.15, после того как наклонена внутрь наклонным элементом 12.6 на корпусе 12, должна быть дополнительно наклонена во внутреннем направлении внутри рамы 2 при приложении аксиальной нагрузки между рамой 2 и носителем 7, резко выводя их из зацепления.
На фигуре 20 показан продольный разрез альтернативного варианта осуществления механизма 31 разблокирования обратной связи. В противоположность механизму 31 разблокирования обратной связи, показанному на фигуре 13, где пружина 29 обратной связи работает между плунжером 9 и компонентом 28 обратной связи, в варианте осуществления, показанном на фигуре 20, пружина 29 обратной связи действует между корпусом 12 и компонентом 28 обратной связи. В процессе выдвижения иглы пружина 29 обратной связи сжимается по мере того как компонент 28 обратной связи перемещается вместе с носителем 7 относительно корпуса 12. Когда компонент 28 обратной связи деблокируется плунжером 9 незадолго до окончания выдачи дозы, компонент 28 обратной связи перемещается в дистальном направлении D и соударяется с пусковой кнопкой 13. В отличие от Фигуры 13 пружина 29 обратной связи повторно не сжимается в процессе отведение иглы, поскольку она установлена в корпусе 12, а не в плунжере 9.
На фигурах 21A и 21B показаны продольные разрезы альтернативного варианта осуществления механизма 24 регулировки выдвижения иглы, который также выполнен с возможностью осуществления функции фиксатора механизма 18 фиксации при отведении иглы и выдвижении иглы. На фигуре 22 показан соответствующий вид в изометрии. Четвертый зажим 20.5 на первой втулке 20 расположен в виде упругой балки, имеющей головку балки с внутренним проксимальным тринадцатым наклонным элементом 20.6 для зацепления с четвертым ребром 7.18 на носителе 7 и поддерживаемой в наружном направлении корпусом 12, чтобы удерживать первую втулку 20 в зацеплении с носителем 7 до использования, в процессе выдвижение иглы и в процессе вытеснения лекарственного вещества. Когда корпус 12 перемещается в дистальном направлении относительно носителя, например, когда пользователь приподнимает корпус 12 с участка инъекции в конце инъекции, шестая выемка 12.7 в корпусе 12 перемещается в наружном направлении позади четвертого зажима 20.5, позволяя четвертому зажиму 20.5 деблокироваться, когда носитель 7 подтягивается в дистальном направлении D второй втулкой 21. Поскольку четвертый зажим 20.5 должен быть наклонен наружу, для деблокирования четвертого зажима 20.5 требуется небольшое усилие, что создает фиксатор при отводе.
До использования пятый зажим 2.10 на раме 2 упирается в блок 20.7 на первой втулке 20, не допуская перемещения первой втулки 20, а значит и носителя 7, находящегося в зацеплении с первой втулкой 20, в проксимальном направлении P. Для разблокирования, пятый зажим 2.10 должен отклониться наружу поверх блока 20.7. Наружный изгиб пятого зажима 2.10 первоначально не допускается корпусом 12. После того как корпус 12 переместился при соприкосновении с кожей, второе окно 12.8 в корпусе 12 появляется в наружном направлении от пятого зажима 2.10, позволяя совершить наружный изгиб. Пятый зажим 2.10 далее отклоняется четырнадцатым наклонным элементом 7.19 на носителе 7, когда носитель 7 проталкивается в проксимальном направлении P при нажатии кнопки, когда четвертый зажим 20.5 позволяет совершить поступательное перемещение носителя 7 в проксимальном направлении P относительно первой втулки 20, но никакое другое. Фиксатор для выдвижения иглы создается необходимостью смещения пятого зажима 2.10, когда к нему приложена нагрузка со стороны регулировочной пружины 19.
На фигурах 23A и 23B показаны продольные разрезы третьего варианта осуществления механизма 24 регулировки выдвижения иглы, приспособленного также для выполнения функций механизма 18 фиксации. На фигуре 24 показан вид в изометрии механизма 24 регулировки выдвижения иглы, представленного на Фигуре 23. Этот вариант осуществления аналогичен варианту, показанному на фигурах 21A, 21B и 22. Различие заключается в том, что пятый зажим 2.10 расположен на первой втулке 20, а блок 20.7 расположен на раме 2, т.е. их места поменялись, так что на первой втулке 20 имеется два зажима 2.10 и 20.5.
Четвертый зажим 20.5 идентичен зажиму на фигуре 21B. Он сохраняет первую втулку 20 в соединении с носителем 7, пока не запущено отведение иглы, обеспечивая достижение и сохранение выдвижения иглы на полную длину или глубину вплоть до инициации цикла отвода путем перемещения корпуса обратно в дистальном направлении относительно рамы, например при удалении автоинъектора 1 с кожи.
Пятый зажим 2.10 создает фиксатор для выдвижения иглы и высвобождает первую втулку 20 от рамы 2, инициируя выдвижение иглы. Пятый зажим 2.10 не допускает перемещения первой втулки 20, а значит и носителя 7, входящего в зацепление с первой втулкой 20, в проксимальном направлении P до использования устройства благодаря упору в блок 20.7 на раме 2. Для разблокирования пятый зажим 2.10 должен отклониться наружу поверх блока 20.7. Наружный изгиб пятого зажима 2.10 первоначально не допускается корпусом 12. После того как корпус 12 переместился при соприкосновении с кожей, второе окно 12.8 в корпусе 12 появляется в наружном направлении от пятого зажима 2.10, позволяя совершить наружный изгиб. Пятый зажим 2.10 далее отклоняется четырнадцатым наклонным элементом 7.19 на носителе 7, когда носитель 7 проталкивается в проксимальном направлении P при нажатии кнопки, когда четвертый зажим 20.5 позволяет совершить поступательное перемещение носителя 7 в проксимальном направлении P относительно первой втулки 20, но никакое другое. Фиксатор для выдвижения иглы создается необходимостью смещения пятого зажима 2.10, когда к нему приложена нагрузка со стороны регулировочной пружины 19.
На фигурах 25A и 25B показан продольный разрез третьего варианта осуществления механизма 31 разблокирования обратной связи. В данном варианте осуществления специальная пружина обратной связи не требуется. Плунжер 9 содержит проксимально наклонное ребро 9.2, выполненное с возможностью расширения двух седьмых зажимов 7.21 на носителе 7 непосредственно перед завершением выдачи дозы. Когда проксимально наклонное ребро 9.2 перемещается за седьмые зажимы 7.21, они схлопываются обратно и соударяются с плунжером 9, порождая звук. Трубчатая форма носителя 7 способствует передаче звука. На фигуре 25A показан механизм 31 разблокирования обратной связи перед деблокированием. На фигуре 25B показан механизм 31 разблокирования обратной связи после деблокирования. Проксимальные поверхности седьмых зажимов 7.21 на носителе 7 аксиально смещены для облегчения сборки путем поочередного приподнятия седьмых зажимов 7.21 над дистальной стороной проксимально наклонного ребра 9.2.
На фигурах 26A и 26B показаны продольные разрезы по другому варианту осуществления автоинъектора 1 в различных плоскостях сечения, при этом плоскости сечения повернуты приблизительно на 90° относительно друг друга, сам же автоинъектор 1 пребывает в исходном состоянии до его использования. Автоинъектор 1 по существу идентичен автоинъектору на фигурах 1-15. Однако, в отличие от автоинъектора, представленного на фигурах 1–15, автоинъектор 1 по данному варианту осуществления вместо пусковой кнопки имеет охватывающую пусковую муфту.
Охватывающая пусковая муфта 12 представляет собой тот же компонент, что и корпус 12, который имеет закрытую дистальную торцевую поверхность 12.10, иную, чем та, что показана на фигурах 1-15. Внутренняя пусковая кнопка 13 расположена на дистальном конце внутри пусковой муфты 12. В отличие от фигур 1-15 пусковая кнопка 13 не видна и не выступает из корпуса 12 ни в одном из состояний. В исходном состоянии между дистальной торцевой поверхностью 12.10 пусковой муфты 12 и внутренней пусковой кнопкой 13 предусмотрен зазор 33, позволяющей пусковой муфте 12 совершить некоторое перемещение, не сталкиваясь с пусковой кнопкой 13.
Поскольку автоинъектор 1 не отличается от автоинъектора, представленного на фигурах 1–15, в других аспектах, он работает по существу таким же образом, за исключением следующих моментов.
Когда рама 2 размещена вплотную к участку инъекции, пусковая муфта 12 поступательно перемещается в проксимальном направлении P относительно рамы 2 в выдвинутое положение на первом этапе перемещения муфты, устраняя зазор 33 между дистальной торцевой поверхностью 12.10 пусковой муфты 12 и внутренней пусковой кнопкой 13. Как и в варианте осуществления на фигурах 1–15, это перемещение деблокирует механизм 18 фиксации и пусковую кнопку 13. По мере того как пользователь продолжает оказывать давление на пусковую муфту 12 на втором этапе перемещения муфты, тем самым дополнительно продвигая ее в проксимальном направлении P, дистальная торцевая поверхность 12.10 сталкивается с внутренней пусковой кнопкой 13, тем самым нажимая на нее, пока первая втулка 20 не высвободится от рамы 2 и усилие регулировочной пружины не будет приложено к носителю 7. Носитель 7 далее продвигается до тех пор, пока внутренняя пусковая кнопка 13 не остановится на другом ребре в корпусе 12 и механизм 27 разблокирования плунжера не будет разблокирован (следует отметить, что штырь 14 в данном варианте осуществления короче).
С точки зрения пользователя, механизм 18 фиксации выполнен с возможностью создания усилия сопротивления, когда пользователь достигает второго этапа перемещения муфты. С точки зрения существа дела, в этом момент не существует отличия от варианта осуществления, представленного на фигурах 1-15.
Выдвижение иглы запускается благодаря тому, что пользователь полностью продвигает пусковую муфту 12 на втором этапе перемещения муфты, тем самым полностью вдавливая внутреннюю пусковую кнопку 13 и преодолевая механизм фиксации, как и в варианте осуществления, представленном на фигурах 1-15.
Когда регулировочная пружина 19 при нажатии кнопки принимает на себя функцию полного продвижения носителя 7 для выдвижения иглы, внутренняя пусковая кнопка 13 достигает внутреннего пятого ребра 12.11 в пусковой муфте 12, при этом внутренняя пусковая кнопка 13 переключается обратно в зафиксированное положение на пусковой муфте 12, как в третьем состоянии, показанном на фигуре 15C.
Вариант осуществления, показанный на фигурах 26A и 26B, может также объединяться с альтернативными элементами, проиллюстрированными на фигурах 16-25.
На фигуре 27 показан продольный разрез дистального конца автоинъектора 1 с альтернативным механизмом 31 разблокирования обратной связи до активации в первом положении. Плунжер 9, предназначенный для воздействия на шприц или пробку (не показано), удерживается в носителе 7 шприца. Пусковая кнопка 13 расположена поверх дистального конца носителя 7 шприца. Приводная пружина 8 расположена в носителе 7, при этом дистально установлена на носителе 7, а проксимально прилегает к упорной поверхности 11 на плунжере 9. Дистальная муфта 17 плунжера крепится дистально к упорной поверхности 11 и расположена внутри приводной пружины 8. Компонент 28 обратной связи содержит удлиненный участок 28.1, расположенный в дистальной муфте 17 плунжера, а также дистальный концевой штифт 28.4, который полностью располагается в носителе 7 в первом положении, а потому пользователь его не видит и не чувствует.
Пружина 29 обратной связи выполнена с возможностью смещения компонента 28 обратной связи в дистальном направлении D относительно плунжера 9 благодаря упору в проксимальном направлении в упорную поверхность 11, а дистально - в компонент 28 обратной связи.
Как приводная пружина 8, так и пружина 29 обратной связи пребывают в напряженном состоянии. Плунжер 9 входит в зацепление с носителем 7 с помощью механизма разблокирования плунжера (не показан). Механизм разблокирования плунжера может располагаться так же, как и в одном из вышеописанных вариантов осуществления.
Дистальная муфта 17 плунжера содержит два упругих наклонных захвата 17.1, удерживающих компонент 28 обратной связи путем зацепления с его наклонной поверхностью 28.5. Захваты 17.1 с наружной стороны поддерживаются утолщенным участком 7.23 стенки носителя 7, так чтобы не допустить их отклонения в наружном направлении под действием наклонного элемента в условиях приложения силовой нагрузки со стороны пружины 29 обратной связи. Следовательно, компонент 28 обратной связи не может быть разблокирован в данной конфигурации.
На фигуре 28 показан продольный разрез дистального конца автоинъектора 1 с альтернативным механизмом 31 разблокирования обратной связи, представленным на фигуре 27, после деблокирования во втором положении.
Плунжер 9 высвобожден механизмом разблокирования плунжера, а значит, поступательно переместился в проксимальном направлении P для перемещения пробки. В процессе проксимального перемещения плунжера 9 наклонные захваты 17.1 на дистальной муфте 17 плунжера покинули утолщенный участок 7.23 стенки и вошли в расширенный участок, позволяющий им отклониться в наружном направлении под действием наклонного элемента под нагрузкой со стороны пружины 29 обратной связи. Компонент обратной связи продвигается в дистальном направлении D под воздействием пружины 29 обратной связи через дистальный конец носителя 7, в результате чего дистальный концевой штифт 28.4 в итоге выступает из дистального конца пусковой кнопки 13 через расположенное в ней проходное отверстие 13.7, когда компонент 28 обратной связи достигает второго положения. Дистальный концевой штифт 28.4, таким образом, виден пользователю. Если пользователь по-прежнему нажимает большим пальцем на пусковую кнопку 13, он может также почувствовать большим пальцем дистальный концевой штифт 28.4. Помимо этого, наклонная поверхность 28.5, сталкивающаяся с пусковой кнопкой 13 с внутренней стороны, может порождать как звуковой сигнал обратной связи, так и тактильное ощущение удара.
Дистальный муфта 17 плунжера может иметь один или более упругих наклонных захватов 17.1. По меньшей мере, один упругий наклонный захват 17.1 также может быть соединен непосредственно с упорной поверхностью 11 на плунжере 9, так что дистальная муфта 17 плунжера не потребуется.
Пусковая кнопка 13 может соединяться с носителем 7 или с корпусом (не показано), окружающим носитель 7. Пусковая кнопка 13 не обязательно должна оставаться в одном и том же продольном положении относительно носитель 7. Вместо этого в конце выдачи дозы пусковая кнопка 13 может по-прежнему располагаться на конце корпуса (не показано), в то время как носитель 7 со всеми его внутренними компонентами продвинулся в корпусе. Для этой цели пружина 29 обратной связи и компонент 28 обратной связи конструктивно должны быть соответственно мощной и длинным, чтобы гарантировать, что компонент 28 обратной связи по-прежнему достигает пусковой кнопки 13 в конце выдачи дозы, так чтобы дистальный концевой штифт 28.4 мог выступать из пусковой кнопки 13.
Компонент 28 обратной связи может быть выполнен с возможностью разблокирования, прежде чем плунжер 9 и пробка достигнут своего положения окончания выдачи дозы, предпочтительно незадолго до этого события.
«Шумовой» компонент 28 согласно фигурам 27 и 28 может быть объединен с вариантами осуществления, показанными на фигурах 1-26, при этом соответствующая пусковая кнопка 13 или охватывающая пусковая муфта 12 должна быть оборудована проходным отверстием 13.7, а компонент 28 обратной связи должен иметь дистальный концевой штифт 28.4. Разблокирование компонента 28 обратной связи может достигаться либо механизмом 31 разблокирования обратной связи, представленным на Фигурах 27 и 28, либо одним из механизмов 31 разблокирования обратной связи, проиллюстрированных в других вариантах осуществления.
«Шумовой» механизм 31 разблокирования согласно Фигурам 27 и 28 может также применяться в автоинъекторах других типов. Например, носитель 7 шприца может использоваться в качестве части корпуса или кожуха вместо того, чтобы располагаться в дополнительном корпусе. Таким же образом проходное отверстие 13.7 может располагаться в части корпуса или охватывающей пусковой муфте вместо пусковой кнопки 13.
Дистальный концевой штифт 28.4 может иметь цвет, отличный от цвета пусковой кнопки 13, например красный, чтобы улучшить визуальную индикацию, извещающую пользователя о достижении конца выдачи дозы и о том, что устройство использовано.
Разумеется, во всех наклонных зацеплениях между двумя компонентами, описанных в вышеприведенных вариантах осуществления, может иметься всего один наклонный элемент на одном или другом компоненте, либо наклонные элементы могут присутствовать на обоих компонентах, не оказывая существенного влияния на эффект наклонного зацепления.
Термин «лекарственное вещество» в настоящем описании означает фармацевтическую композицию, содержащую, по меньшей мере, одно фармацевтически активное соединение,
при этом в одном варианте осуществления фармацевтически активное соединение имеет молекулярный вес до 1500 Da и/или представляет собой пептид, протеин, полисахарид, вакцину, ДНК, РНК, энзим, антитело или его фрагмент, гормон или олигонуклеотид либо смесь вышеупомянутых фармацевтически активных соединений,
при этом в следующем варианте осуществления фармацевтически активное соединение является полезным для лечения и/или профилактики сахарного диабета или осложнений, связанных с сахарным диабетом, таких как диабетическая ретинопатия, тромбоэмболийные осложнения, такие как тромбоз глубоких вен или легочная тромбоэмболия, острый коронарный синдром (ACS), ангина, инфаркт миокарда, злокачественные новообразования, дегенерация макулы, воспалительные заболевания, поллиноз, атеросклероз и/или ревматоидный артрит,
при этом в следующем варианте осуществления фармацевтически активное соединение содержит, по меньшей мере, один пептид для лечения и/или профилактики сахарного диабета или осложнений, связанных с сахарным диабетом, таких как диабетическая ретинопатия,
при этом в следующем варианте осуществления фармацевтически активное соединение содержит, по меньшей мере, один инсулин человека или аналог инсулина человека или производную, глюкагоноподобный пептид (GLP-1) либо аналог или его производную, или экседин-3, или экседин-4, либо аналог или производную экседина-3 или экседина-4.
Аналоги инсулина могут представлять собой, например, Gly(A21), Arg(B31), Arg(B32) человеческий инсулин; Lys(B3), Glu(B29) человеческий инсулин; Lys(B28), Pro(B29) человеческий инсулин; Asp(B28) человеческий инсулин; человеческий инсулин, при этом пролин в позиции B28 замещается на Asp, Lys, Leu, VaL или Ala, а в позиции B29 Lys может быть замещен на Pro; Ala(B26) человеческий инсулин; Des(B28-B30) человеческий инсулин; Des(B27) человеческий инсулин и Des(B30) человеческий инсулин.
Производные инсулина могут представлять собой, например, B29-N-миристоил-дез(B30) человеческий инсулин; B29-N-палмитоил-дез(B30) человеческий инсулин; B29-N-миристоил человеческий инсулин; B29-N-палмитоил человеческий инсулин; B28-N-миристоил LysB28ProB29 человеческий инсулин; B28-N-палмитоил-LysB28ProB29 человеческий инсулин; B30-N-миристоил-ThrB29LysB30 человеческий инсулин; B30-N-палмитоил-ThrB29LysB30 человеческий инсулин; B29-N-(N-палмитоил-Y-глутамил)-дез(B30) человеческий инсулин; B29-N-(N-литохолил-Y-глутамил)-дез(B30) человеческий инсулин; B29-N-(ω-карбоксигептадеканоил)-дез(B30) человеческий инсулин и B29-N-(ω-карбоксигептадеканоил) человеческий инсулин.
Эксендин-4, например, означает Экседин-4(1-39), последовательность пептидов H-His-Gly-Glu-Gly-Thr-Phe-Thr-Ser-Asp-Leu-Ser-Lys-GIn-Met-Glu-Glu-Glu-Ala-Val-Arg-Leu-Phe-Ile-Glu-Trp-Leu-Lys-Asn-Gly-Gly-Pro-Ser-Ser-Gly-Ala-Pro-Pro-Pro-Ser-NH2.
Производные Экседина-4, например, выбираются из следующего списка соединений:
H-(Lys)4-дез Pro36, дез Pro37 Эксендин-4(1-39)-NH2,
H-(Lys)5-дез Pro36, дез Pro37 Эксендин-4(1-39)-NH2, дез Pro36 [Asp28] Эксендин-4(1-39), дез Pro36 [lsoAsp28] Эксендин-4(1-39), дез Pro36 [Met(O)14, Asp28] Эксендин-4(1-39), дез Pro36 [Met(O)14, lsoAsp28] Эксендин-4(1-39), дез Pro36 [Trp(O2)25, Asp28] Эксендин-4(1-39), дез Pro36 [Trp(O2)25, lsoAsp28] Эксендин-4(1-39), дез Pro36 [Met(O)14 Trp(O2)25, Asp28] Эксендин-4(1-39), дез Pro36 [Met(O)14 Trp(O2)25, lsoAsp28] Эксендин-4(1-39); или
дез Pro36 [Asp28] Эксендин-4(1-39), дез Pro36 [lsoAsp28] Эксендин-4(1-39), дез Pro36 [Met(O)14, Asp28] Эксендин-4(1-39), дез Pro36 [Met(O)14, lsoAsp28] Эксендин-4(1-39), дез Pro36 [Trp(O2)25, Asp28] Эксендин-4(1-39), дез Pro36 [Trp(O2)25, lsoAsp28] Эксендин-4(1-39), дез Pro36 [Met(O)14 Trp(O2)25, Asp28] Эксендин-4(1-39), дез Pro36 [Met(O)14 Trp(O2)25, lsoAsp28] Эксендин-4(1-39), где группа - Lys6-NH2 может быть связана с C-концом производной Эксендина-4;
либо производная Эксендина-4 последовательности H-(Lys)6-дез Pro36 [Asp28] Эксендин-4(1-39)-Lys6-NH2, дез Asp28 Pro36, Pro37, Pro38 Эксендин-4(1-39)-NH2, H-(Lys)6-дез Pro36, Pro38 [Asp28] Эксендин-4(1-39)-NH2, H-Asn-(Glu)5дез Pro36, Pro37, Pro38 [Asp28] Эксендин-4(1-39)-NH2, дез Pro36, Pro37, Pro38 [Asp28] Эксендин-4(1-39)-(Lys)6-NH2, H-(Lys)6-дез Pro36, Pro37, Pro38 [Asp28] Эксендин-4(1-39)-(Lys)6-NH2, H-Asn-(Glu)5-дез Pro36, Pro37, Pro38 [Asp28] Эксендин-4(1-39)-(Lys)6-NH2, H-(Lys)6-дез Pro36 [Trp(O2)25, Asp28] Эксендин-4(1-39)-Lys6-NH2, H-дез Asp28 Pro36, Pro37, Pro38 [Trp(O2)25] Эксендин-4(1-39)-NH2, H-(Lys)6-дез Pro36, Pro37, Pro38 [Trp(O2)25, Asp28] Эксендин-4(1-39)-NH2, H-Asn-(Glu)5-дез Pro36, Pro37, Pro38 [Trp(O2)25, Asp28] Эксендин-4(1-39)-NH2, дез Pro36, Pro37, Pro38 [Trp(O2)25, Asp28] Эксендин-4(1-39)-(Lys)6-NH2, H-(Lys)6-дез Pro36, Pro37, Pro38 [Trp(O2)25, Asp28] Эксендин-4(1-39)-(Lys)6-NH2, H-Asn-(Glu)5-дез Pro36, Pro37, Pro38 [Trp(O2)25, Asp28] Эксендин-4(1-39)-(Lys)6-NH2, H-(Lys)6-дез Pro36 [Met(O)14, Asp28] Эксендин-4(1-39)-Lys6-NH2, дез Met(O)14 Asp28 Pro36, Pro37, Pro38 Эксендин-4(1-39)-NH2, H-(Lys)6-дез Pro36, Pro37, Pro38 [Met(O)14, Asp28] Эксендин-4(1-39)-NH2, H-Asn-(Glu)5-дез Pro36, Pro37, Pro38 [Met(O)14, Asp28] Эксендин-4(1-39)-NH2, дез Pro36, Pro37, Pro38 [Met(O)14, Asp28] Эксендин-4(1-39)-(Lys)6-NH2, H-(Lys)6-дез Pro36, Pro37, Pro38 [Met(O)14, Asp28] Эксендин-4(1-39)-(Lys)6-NH2, H-Asn-(Glu)5 дез Pro36, Pro37, Pro38 [Met(O)14, Asp28] Эксендин-4(1-39)-(Lys)6-NH2,
H-Lys6-дез Pro36 [Met(O)14, Trp(O2)25, Asp28] Эксендин-4(1-39)-Lys6-NH2, H-дез Asp28 Pro36, Pro37, Pro38 [Met(O)14, Trp(O2)25] Эксендин-4(1-39)-NH2, H-(Lys)6-дез Pro36, Pro37, Pro38 [Met(O)14, Asp28] Эксендин-4(1-39)-NH2, H-Asn-(Glu)5-дез Pro36, Pro37, Pro38 [Met(O)14, Trp(O2)25, Asp28] Эксендин-4(1-39)-NH2,
дез Pro36, Pro37, Pro38 [Met(O)14, Trp(O2)25, Asp28] Эксендин-4(1-39)-(Lys)6-NH2,
H-(Lys)6-дез Pro36, Pro37, Pro38 [Met(O)14, Trp(O2)25, Asp28] Эксендин-4(S1-39)-(Lys)6-NH2,
H-Asn-(Glu)5-дез Pro36, Pro37, Pro38 [Met(O)14, Trp(O2)25, Asp28] Эксендин-4(1-39)-(Lys)6-NH2;
либо фармацевтически приемлемые соль или сольват любой из вышеупомянутых производных Эксендина-4.
Гормоны представляют собой, например, гормоны гипофиза или гормоны гипоталамуса, или регуляторные активные пептиды и их антагонисты согласно списку в Rote Liste, ed. 2008, Chapter 50, такие как гонадотропин (фоллитропин, лютропин, хорионгонадотропин, менотропин), соматропин (соматропин), десмопрессин, терлипрессин, гонадорелин, трипторелин, леупрорелин, бусерилин, нафарелин, гозерелин.
Полисахарид может представлять собой, например, глюкозаминогликан, гиалуроновую кислоту, гепарин, низкомолекулярный гепарин или сверхнизкомолекулярный гепарин, либо их производные, либо сульфатированная, например, полисульфатированная форма вышеупомянутых полисахаридов, и/или фармацевтически приемлемые их соли. Примером фармацевтически приемлемой соли полисульфатированного низкомолекулярного гепарина служит эноксапарин натрий.
Антитела представляют собой глобулярные белки плазмы крови (~150 kDa), которые также известны как иммуноглобулины с идентичной базовой структурой. Имея сахаридные цепи, присоединенные к аминокислотным остаткам, они являются гликопротеинами. Основной функциональной единицей каждого антитела является мономер иммуноглобулина (lg) (содержащий только одну единицу lg); секретированные антитела могут также быть димерными, имеющими две единицы lg, такие как lgA, тетрамерными с четырьмя единицами lg, например lgM костистых рыб, или пентамерными с пятью единицами lg, например lgM млекопитающих.
Мономер lg представляет собой "Y"-образную молекулу, состоящую из четырех полипептидных цепей; двух одинаковых тяжелых цепей и двух одинаковых легких цепей, соединенных дисульфидными связями между остатками цистейна. Длина каждой тяжелой цепи составляет около 440 аминокислот; длина каждой легкой цепи составляет около 220 аминокислот. Каждая из тяжелых и легких цепей содержит внутрицепные дисульфидные связи, стабилизирующие их укладку. Каждая цепь образована структурными доменами, называемыми lg-доменами. Эти домены содержат около 70-110 аминокислотных остатков и подразделяются на различные категории (например, вариабельные, или V, и константные, или C) согласно их размерам и функциональному назначению. Они имеют характерную укладку цепи иммуноглобулинов, в которой два β-листа образуют форму сэндвича, удерживаемые вместе взаимодействием между цистейном и другими заряженными аминокислотами.
У млекопитающих имеется пять тяжелых цепей lg, обозначенных α, δ, ε, γ и μ. Присутствующий тип тяжелой цепи определяет изотип антитела; эти цепи обнаружены в LgA, LgD, LgE, LgG и LgM-антителах соответственно.
Различимые тяжелые цепи отличаются размером и составом; α и γ содержат приблизительно 450 аминокислот, δ - приблизительно 500 аминокислот, в то время как μ и ε имеют приблизительно 550 аминокислот. Каждая тяжелая цепь имеет две области: константную область (CH) и вариабельную область (VH).У одного биологического вида константная область по существу идентична во всех антителах одного изотипа, но будет иной в антителах других изотипов. Тяжелые цепи γ, a и δ имеют константную область, образованную тремя тандемными Lg-доменами, а также шарнирную область, обеспечивающую дополнительную гибкость; тяжелые цепи μ и ε имеют константную область, образованную четырьмя иммуноглобулиновыми доменами. Вариабельная область тяжелой цепи отличается в антителах, продуцированных B-клетками, но одинакова во всех антителах, продуцированных одной B-клеткой или клоном B-клетки. Вариабельная область каждой тяжелой цепи имеет длину, равную приблизительно 110 аминокислотными остатками, и состоит из одного Lg-домена.
У млекопитающих существует два типа легких цепей иммуноглобулинов, обозначаемых λ и κ. Легкая цепь имеет два последовательно соединенных домена: один константный домен (CL) и один вариабельный домен (VL). Примерная длина легкой цепи составляет от 211 до 217 аминокислот. Каждое антитело содержит две легкие цепи, которые всегда идентичны; у млекопитающих присутствует только один тип легкой цепи, κ или λ.
Хотя общая структура всех антител весьма схожа, индивидуальные свойства данного антитела определяются вариабельными (V) областями, как подробно объяснялось выше. Конкретнее, вариабельные петли, три легкой (VL) цепи и три на тяжелой (VH) цепи, ответственны за связывание с антигеном, т.е. за антигенную специфичность. Эти петли называют гипервариабельными участками (CDR). Поскольку CDR как VH-, так и VL-доменов вносят свой вклад в участок связывания с антигеном, именно комбинация тяжелых и легких цепей, а не одна из них, определяет конечную специфичность антигена.
"Фрагмент антитела" содержит, по меньшей мере, один антиген-связывающий фрагмент согласно вышеприведенному определению, выполняя по существу ту же функцию и проявляя ту же специфичность, что и все антитело, фрагментом которого он является. Ограниченное протеолитическое расщепление папаином приводит к распаду lg-прототипа на три фрагмента. Два идентичных аминотерминальных фрагмента, каждый из которых содержит одну полную L-цепь и около половины H-цепи, представляют собой антиген-связывающие фрагменты (Fab). Третий фрагмент, схожий по размеру, но содержащий карбоксильные терминальные половины обеих тяжелых цепей с их межцепными дисульфидными связями, представляет собой кристаллизуемый фрагмент (Fc). Фрагмент Fc содержит углеводы, комплементсвязывающие и FcB-связывающие участки. Ограниченное расщепление пепсином приводит к образованию единичного F(ab')2-фрагмента, содержащего Fab-фрагменты и шарнирный участок, в том числе H-H-межцепную дисульфидную связь. Фрагмент F(ab')2 является двухвалентным антигенсвязывающим фрагментом. Дисульфидная связь F(ab')2 может расщепляться для получения Fab'. Кроме того, вариабельные области тяжелых и легких цепей могут объединяться для образования одноцепочечного вариабельного фрагмента (scFv).
Фармацевтически приемлемые соли представляют собой, например, соли присоединения кислоты и основные соли. Солями присоединения кислоты являются, например, соли HCl или HBr. Основными солями являются, например, соли, имеющие катион, выбранный из щелочных катионов, например Na+ или K+, или Ca2+, ион аммония N+(R1)(R2)(R3)(R4), где R1-R4 независимо друг от друга означает водород, замененную C1-C6-алкильную группу, замененную C2-C6-алкенильную группу, замененную C6-C10-арильную группу или замененную C6-C10-гетероарильную группу. Дополнительные примеры фармацевтически приемлемых солей описаны в "Remington's Pharmaceutical Sciences" 17. ed. Alfonso R. Gennaro (Ed.), Mark Publishing Company, Easton, Pa., U.S.A., 1985 и в Энциклопедии фармацевтических технологий (Encyclopedia of Pharmaceutical Technology).
Примером фармацевтически приемлемых сольватов служат гидраты.
СПИСОК ССЫЛОЧНЫХ ПОЗИЦИЙ
1 - автоинъектор
2 - рама
2.1 - упругая балка
2.2 - первая головка балки
2.3 - проксимальный третий наклонный элемент
2.4 - дистальный седьмой наклонный элемент
2.5 - отверстие
2.6 - третий зажим
2.7 - паз
2.8 - четвертая головка балки
2.9 - третье ребро
2.10 - пятый зажим
2.11 - шестой зажим
3 - шприц
4 - полая инъекционная игла
5 - защитный кожух иглы
6 - пробка
7 - носитель
7.1 - наклонное звено
7.2 - проксимальный четвертый наклонный элемент
7.3 - дистальный пятый наклонный элемент
7.4 - фиксатор носителя
7.5 - вторая выемка
7.6 - дистальный десятый наклонный элемент
7.7 - третья выемка
7.8 - двенадцатый наклонный элемент
7.9 - продольное отверстие
7.10 - второе ребро
7.11 - первое окно
7.12 - первый зажим
7.13 - второй зажим
7.14 - первая секция
7.15 - вторая секция
7.16 - третья головка балки
7.17 - пятая выемка
7.18 - четвертое ребро
7.19 - четырнадцатый наклонный элемент
7.20 - пятнадцатый наклонный элемент
7.21 - седьмые зажимы
7.22 - отверстие
7.23 - утолщенный участок стенки
8 - приводная пружина
9 - плунжер
9.1 - наклонное звено
9.2 - проксимально наклонное ребро
10 - торцевая поверхность носителя
11 - упорная поверхность
12 - корпус
12.1 - первый фиксатор корпуса
12.2 - второй фиксатор корпуса
12.3 - первое ребро
12.4 - первый задний упор
12.5 - четвертая выемка
12.6 - наклонный элемент
12.7 - шестая выемка
12.8 - второе окно
12.9 - третье окно
12.10 - дистальная торцевая поверхность
12.11 - пятое ребро
13 - пусковая кнопка
13.1 - проксимальная балка
13.2 - наружный первый наклонный элемент
13.3 - внутренний второй наклонный элемент
13.4 - наклонный наружный выступ
13.5 - внутренний выступ
13.6 - второй задний упор
13.7 - проходное отверстие
14 - штырь
14.1 - проксимальный выступ
15 - упругая консоль
16 - первая выемка
17 - дистальная втулка носителя
17.1 - упругий наклонный захват
18 - механизм фиксации
19 - регулировочная пружина
20 - первая втулка
20.1 - наконечник стрелы
20.2 - наружный шестой наклонный элемент
20.3 - внутренний девятый наклонный элемент
20.4 - метка
20.5 - четвертый зажим
20.6 - внутренний проксимальный тринадцатый наклонный элемент
20.7 - блок
20.8 - пятый зажим
21 - вторая втулка
21.1 - проксимальная балка
21.2 - вторая головка балки
21.3 - внутренний выступ
21.4 - дистальный наружный восьмой наклонный элемент
21.5 - продольное ребро
22 - колпачок
22.1 - внутренняя оболочка
23 - крючок
24 - механизм управления выдвижением иглы
25 - механизм регулирования отведения шприца
26 - механизм разблокирования кнопки
27 - механизм разблокирования плунжера
28 - компонент обратной связи.
28.1 - удлиненный участок
28.2 - дистальный концевой участок
28.3 - наружный одиннадцатый наклонный элемент
28.4 - дистальный концевой штифт
28.5 - наклонная поверхность
29 - пружина обратной связи
30 - вторая упругая консоль
30.1 - наклонный внутренний выступ
31 - механизм разблокирования обратной связи
32 - индикаторное окно
33 - зазор
D - дистальный конец, дистальное направление
I - внутреннее направление
M - лекарственное вещество
O - наружное направление
P - проксимальный конец, проксимальное направление.
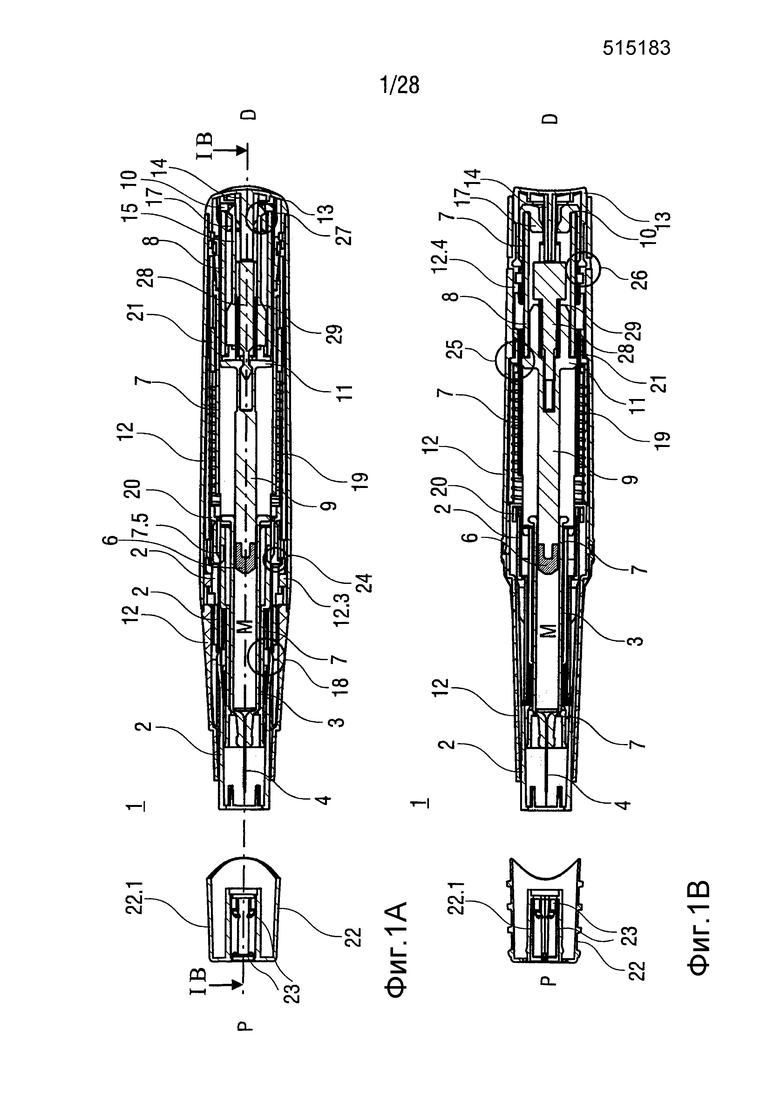
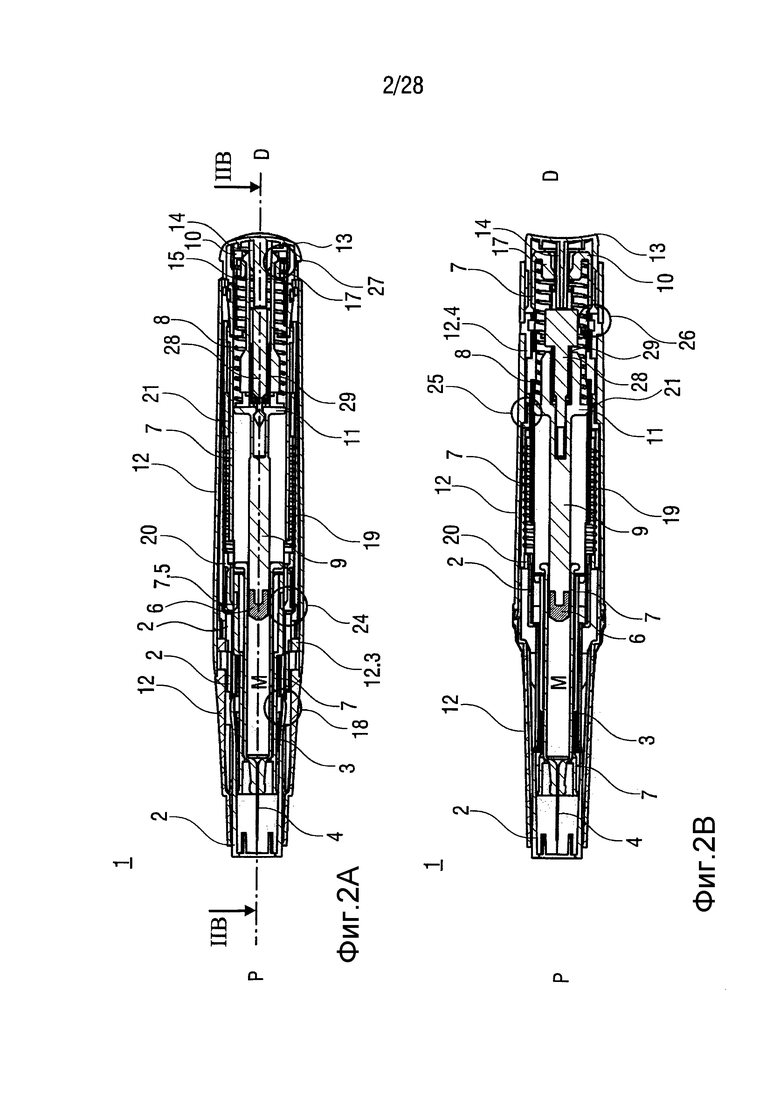
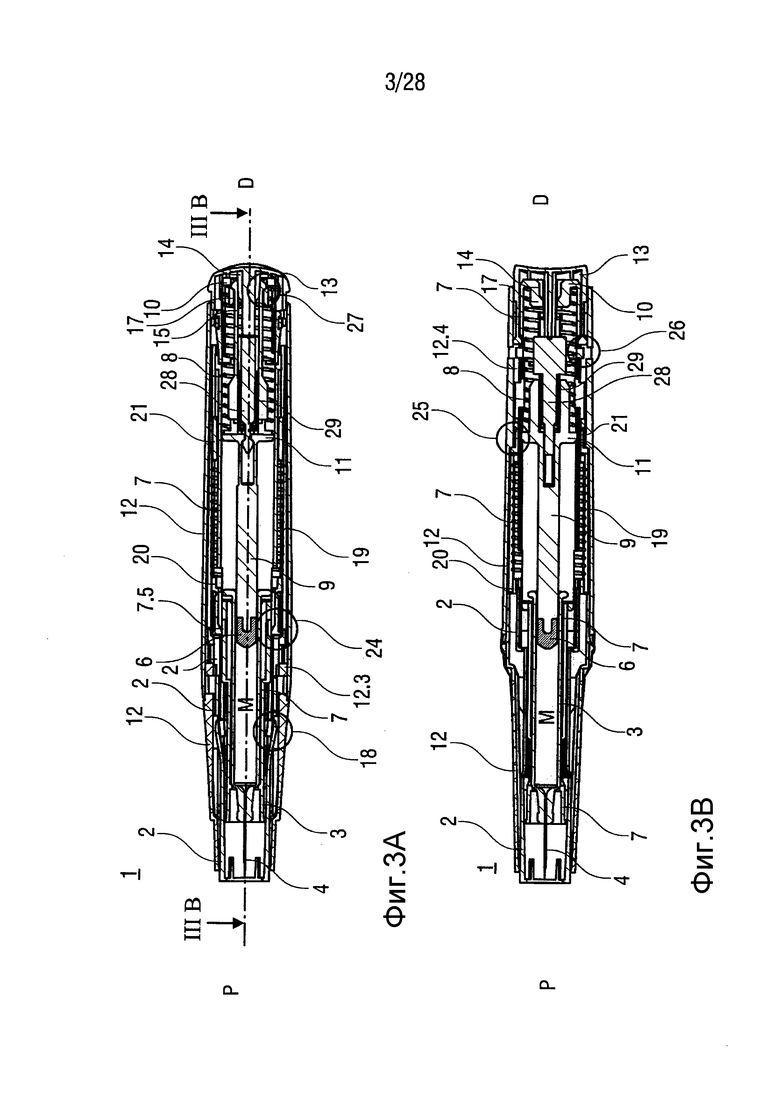
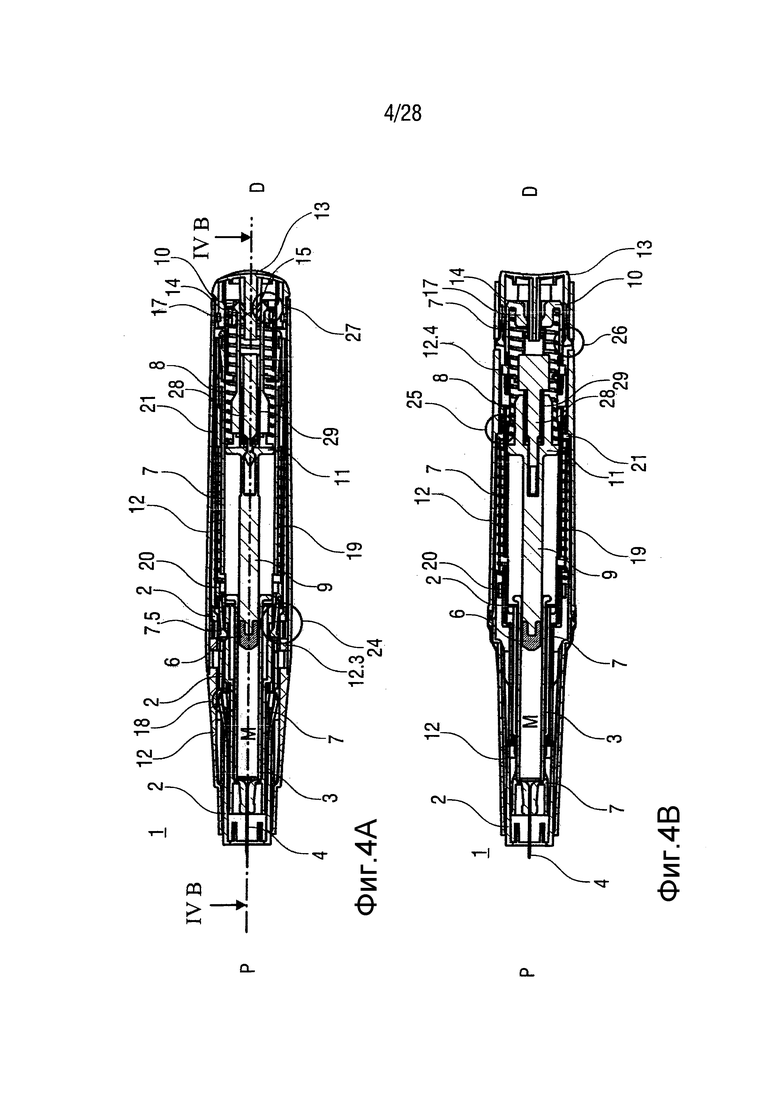
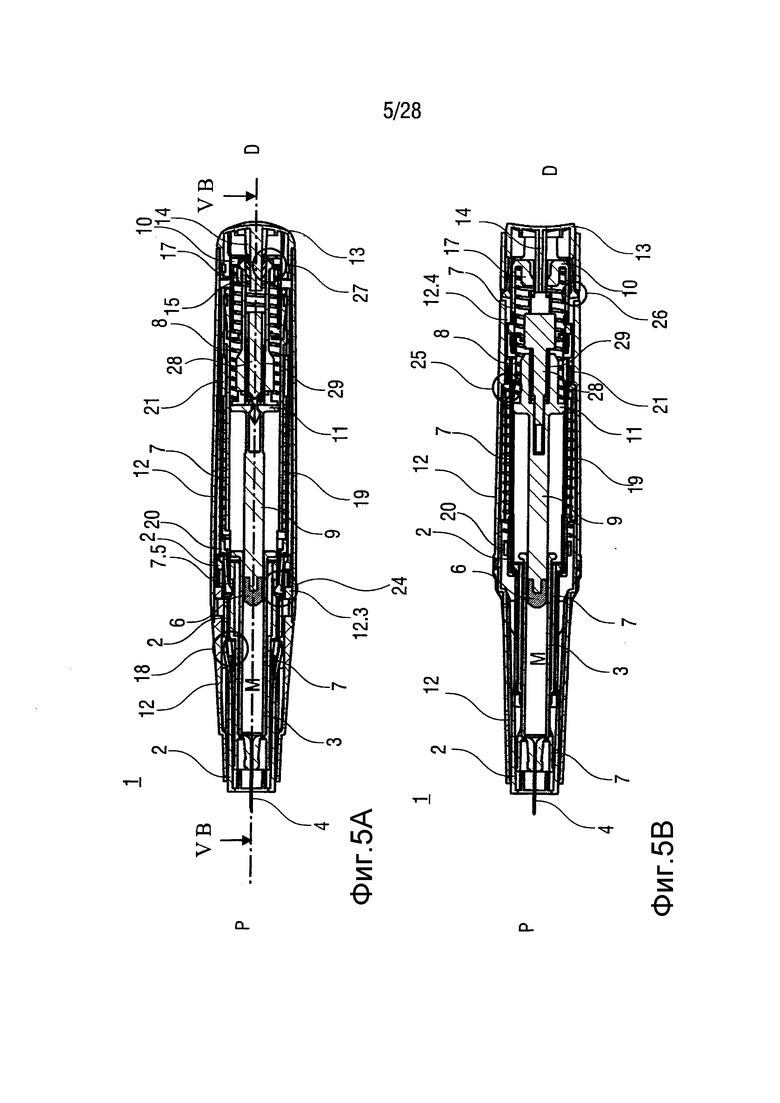
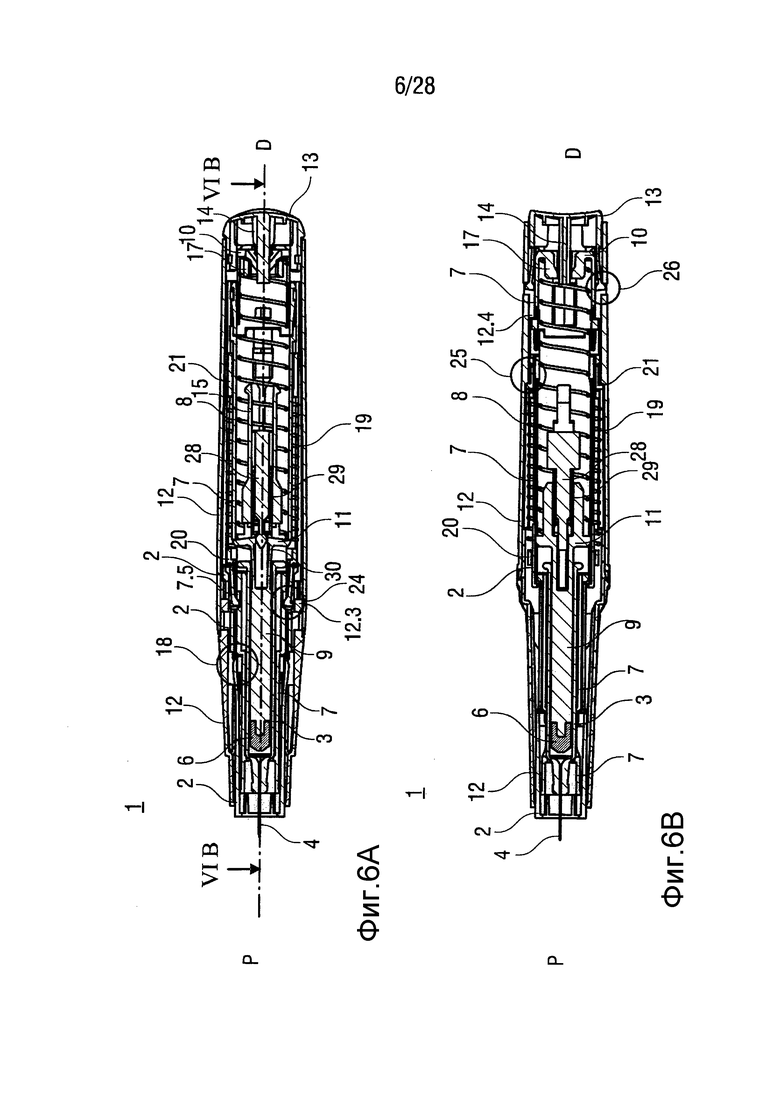
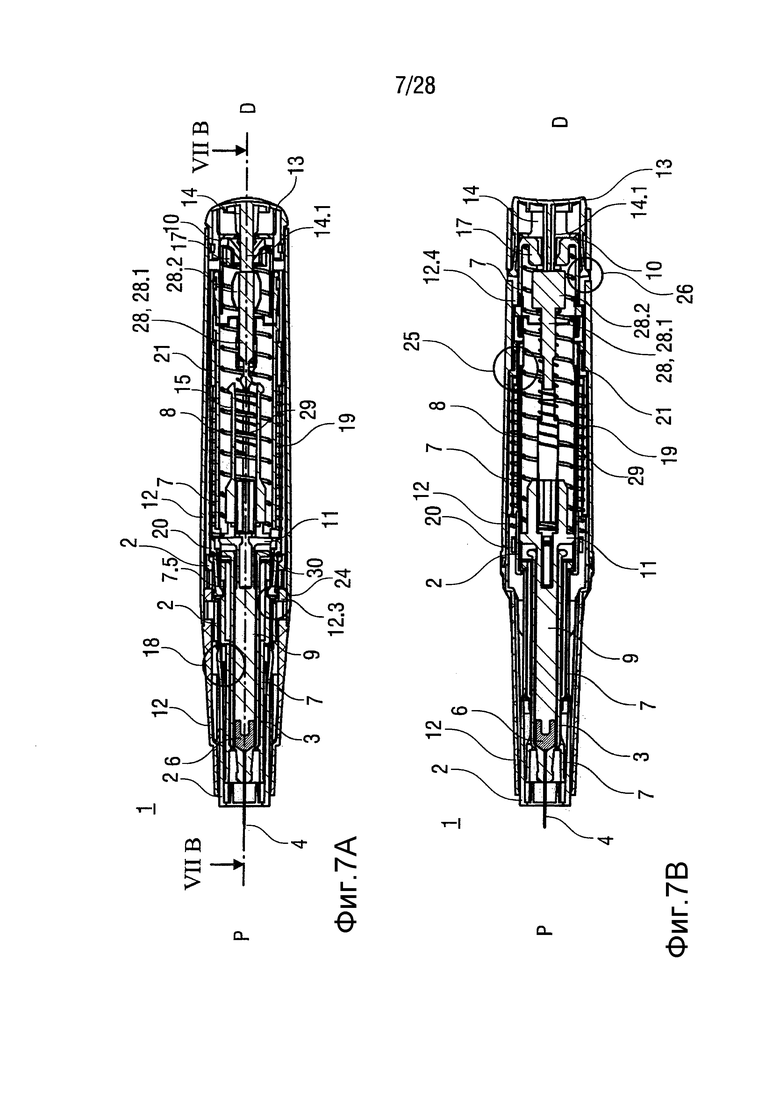
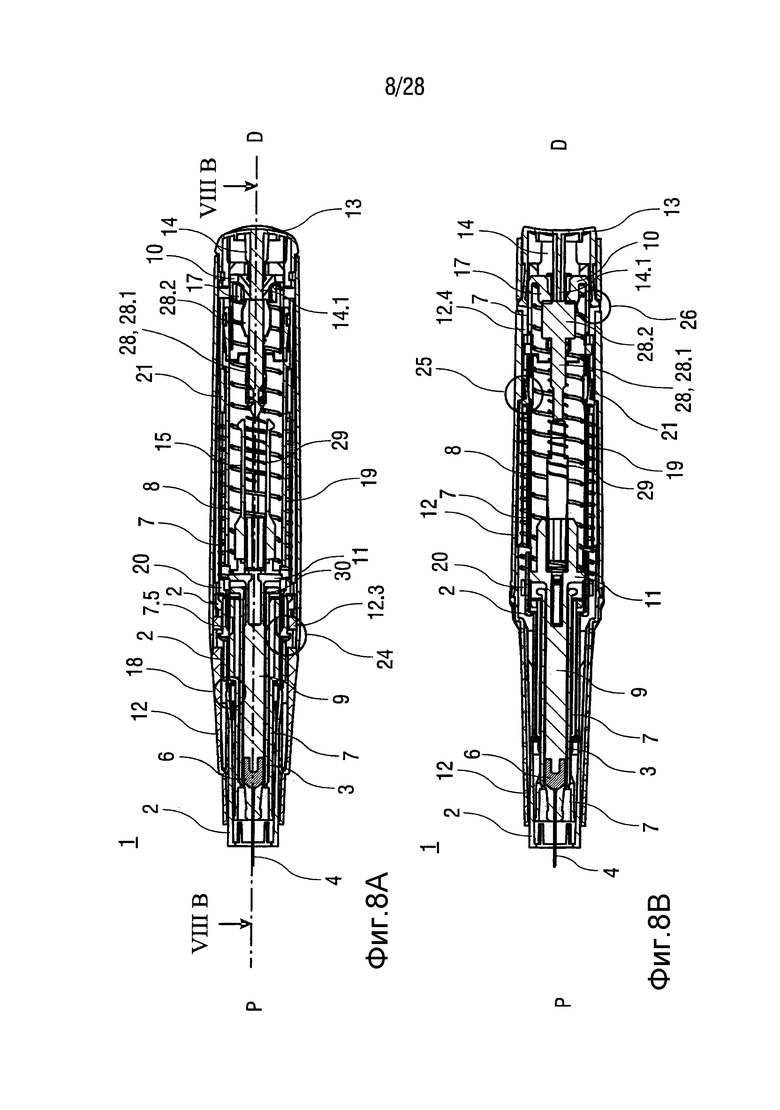
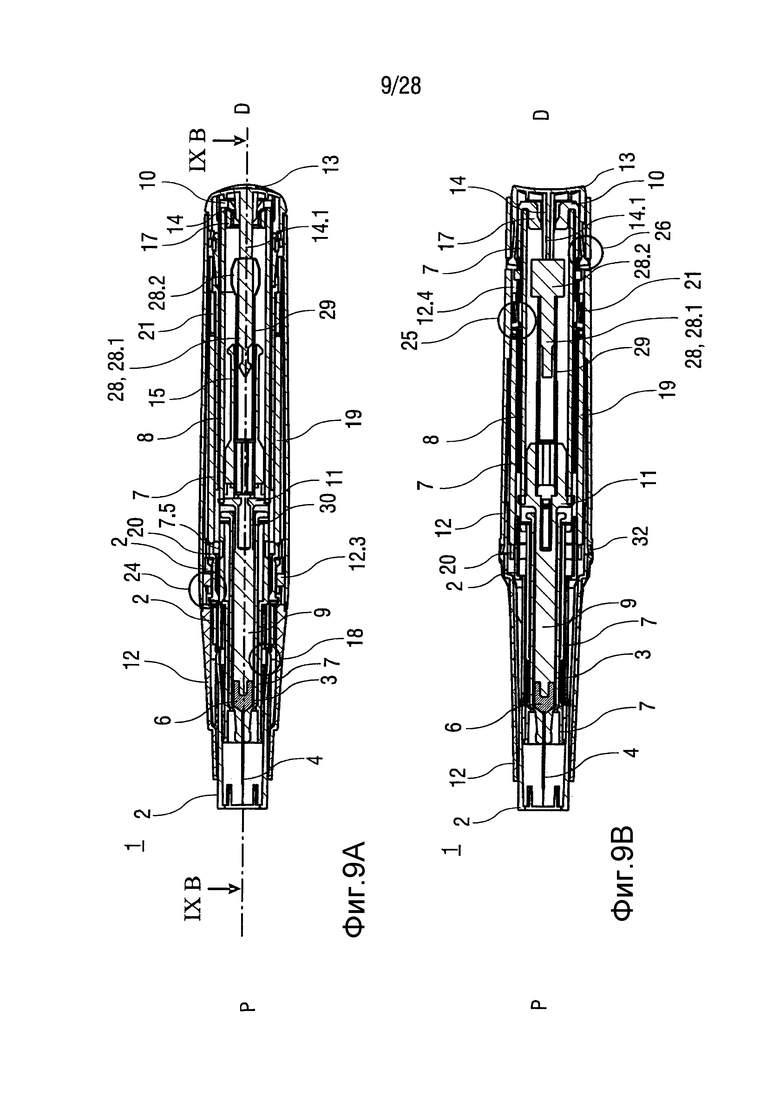
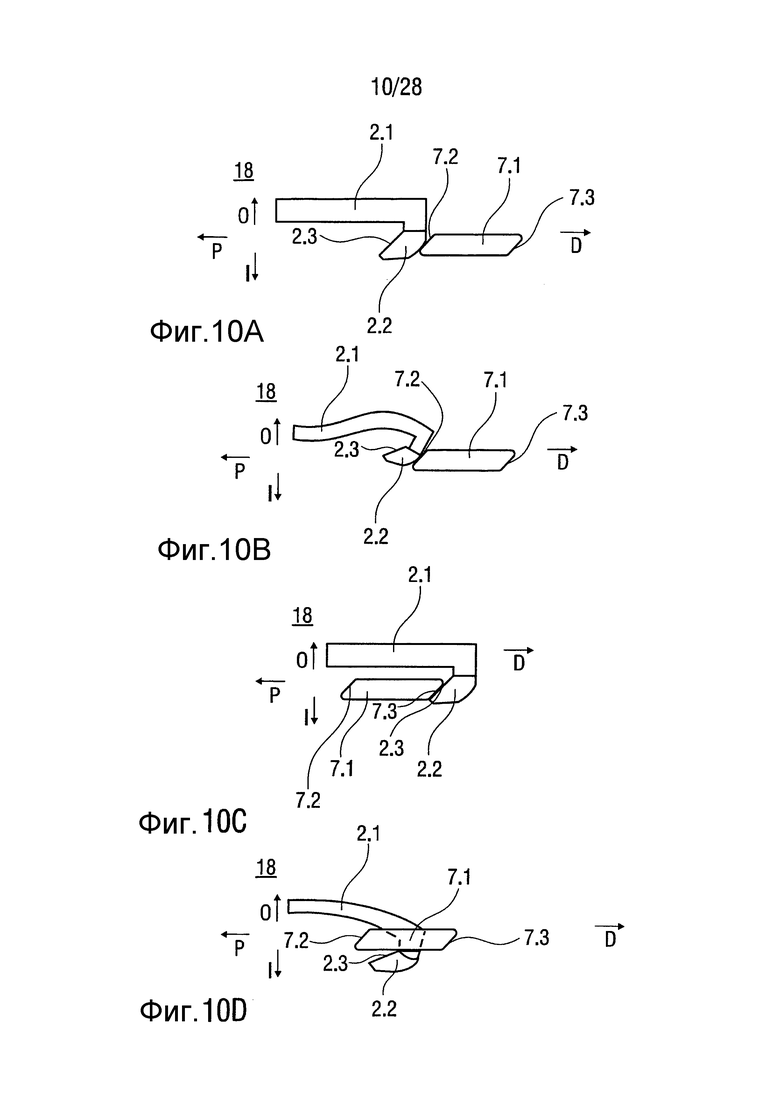
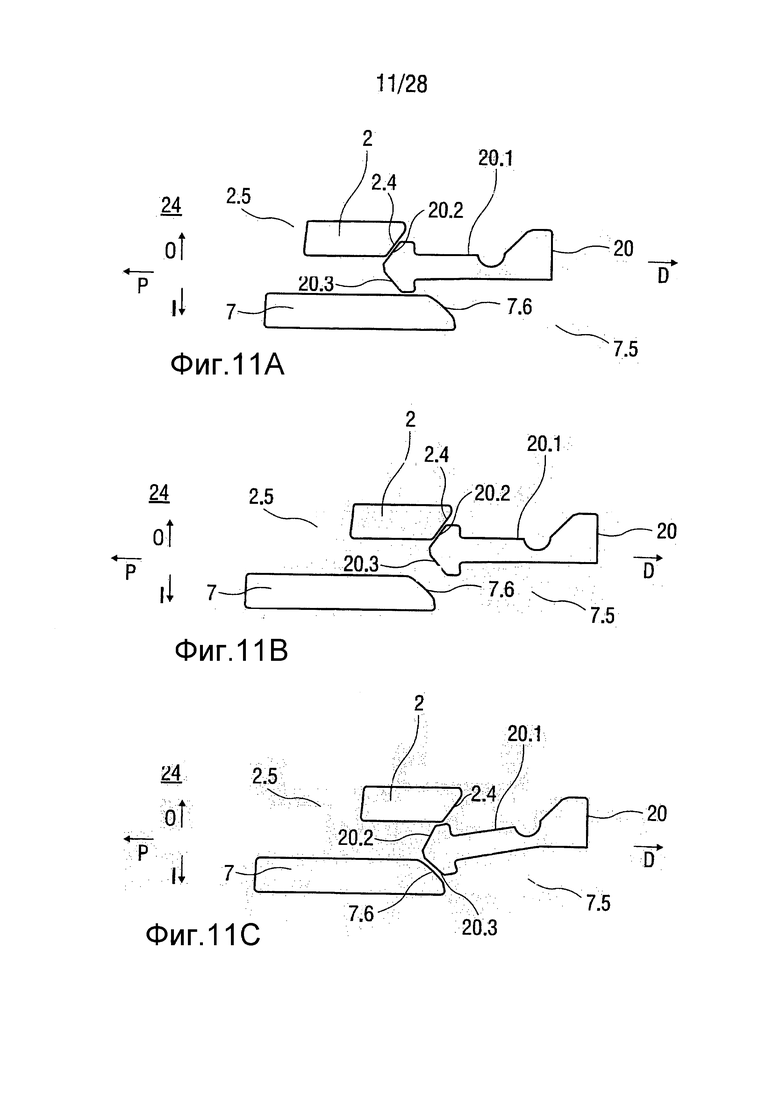
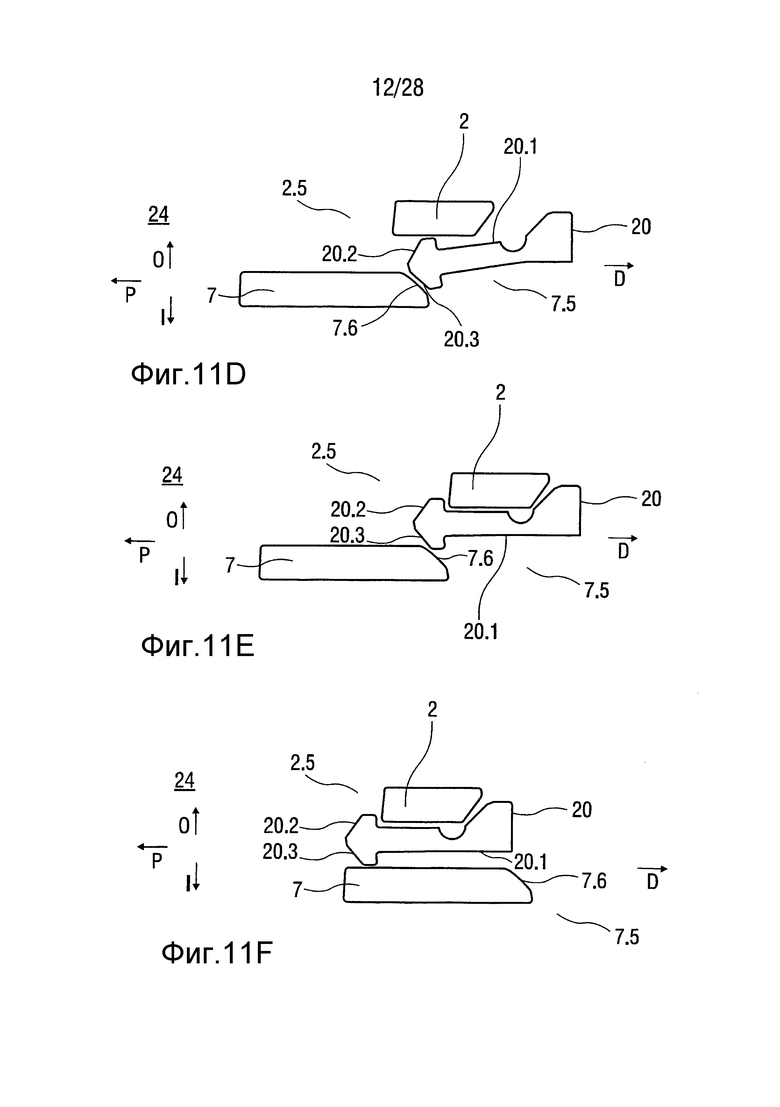
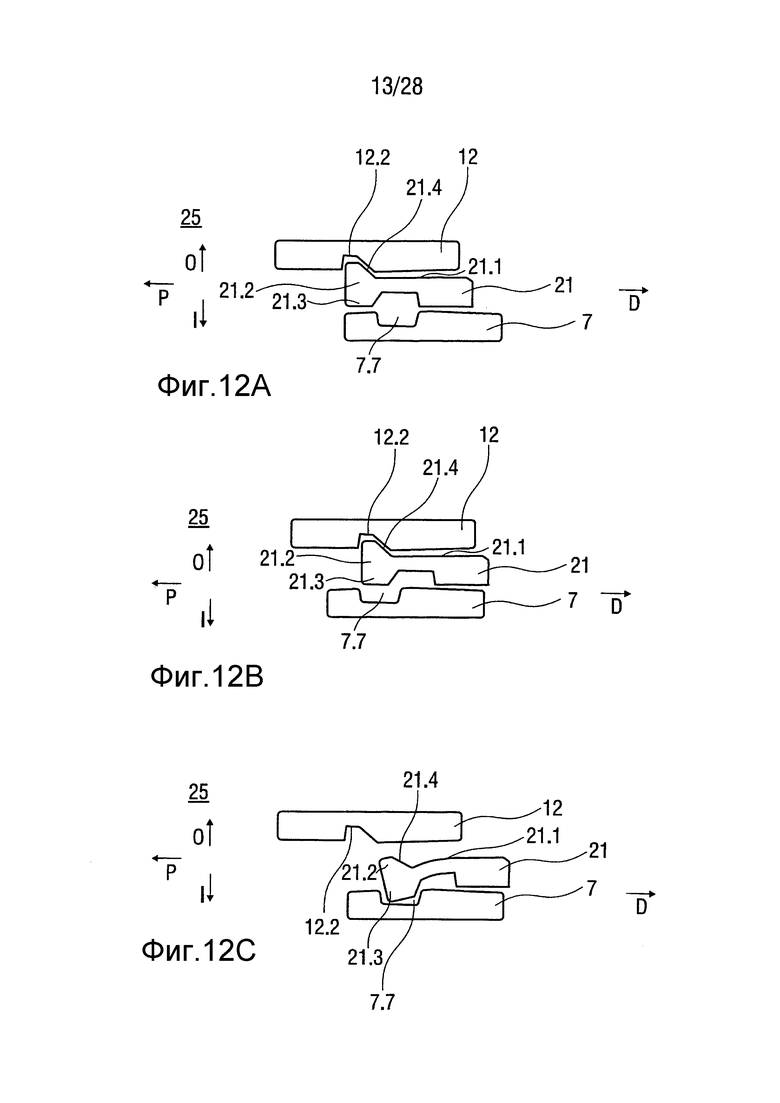
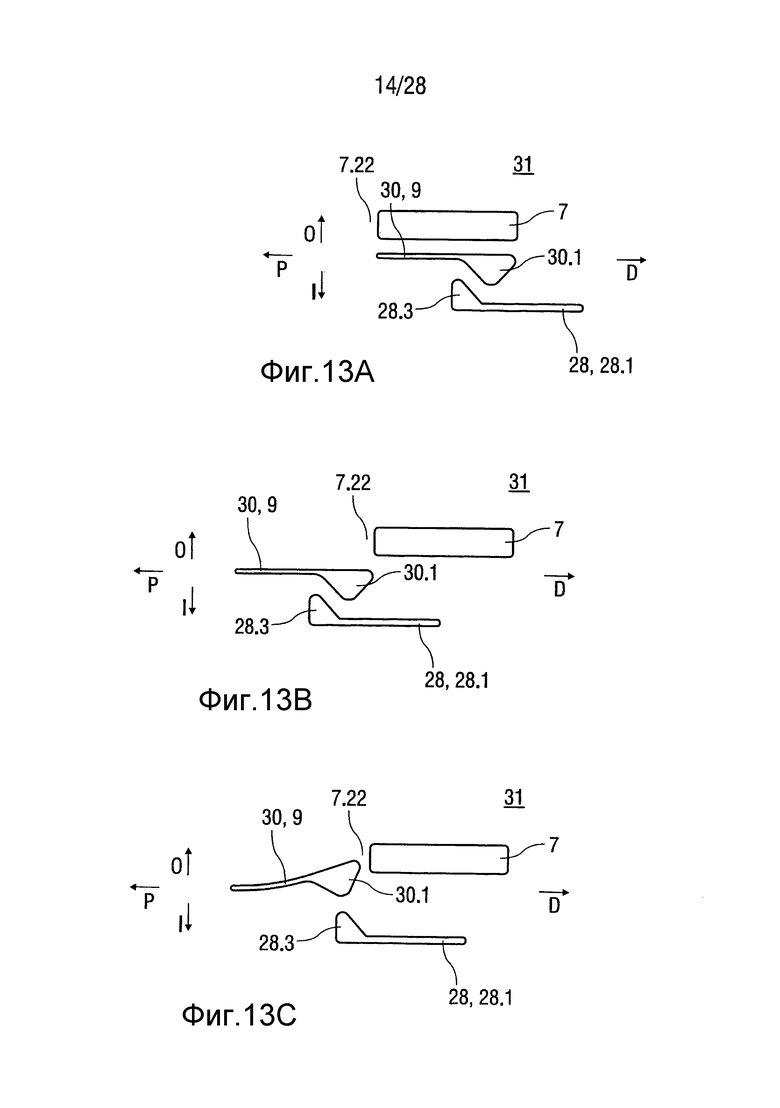
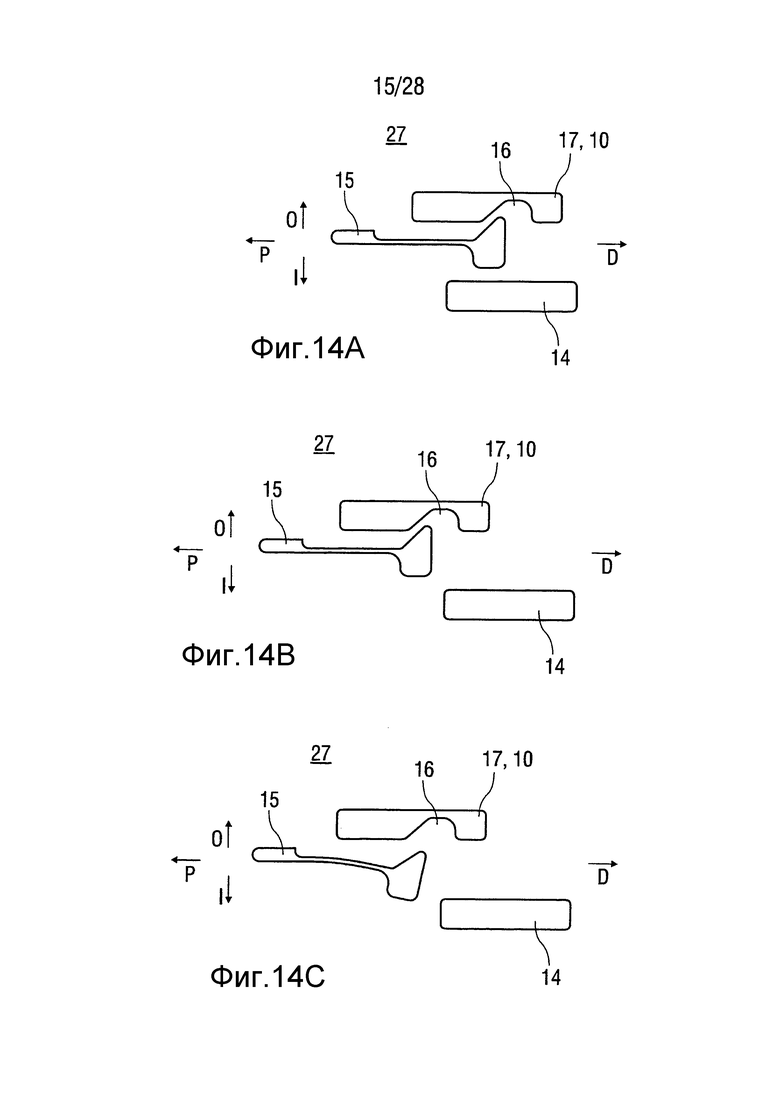
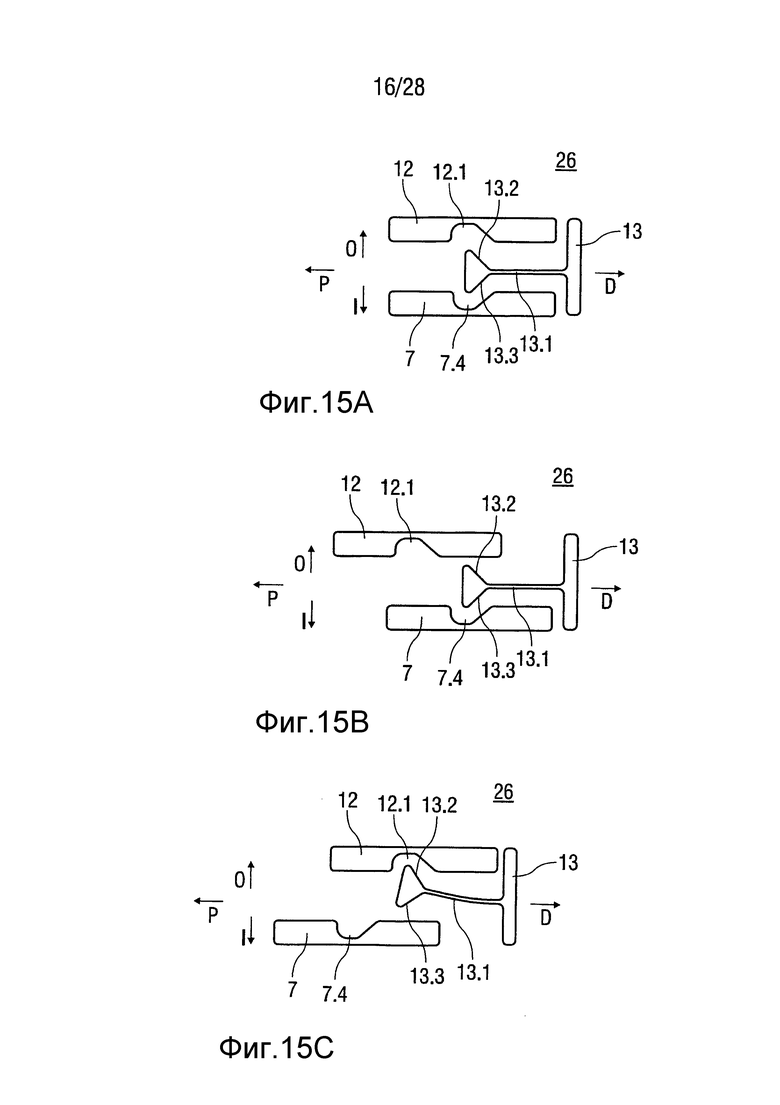

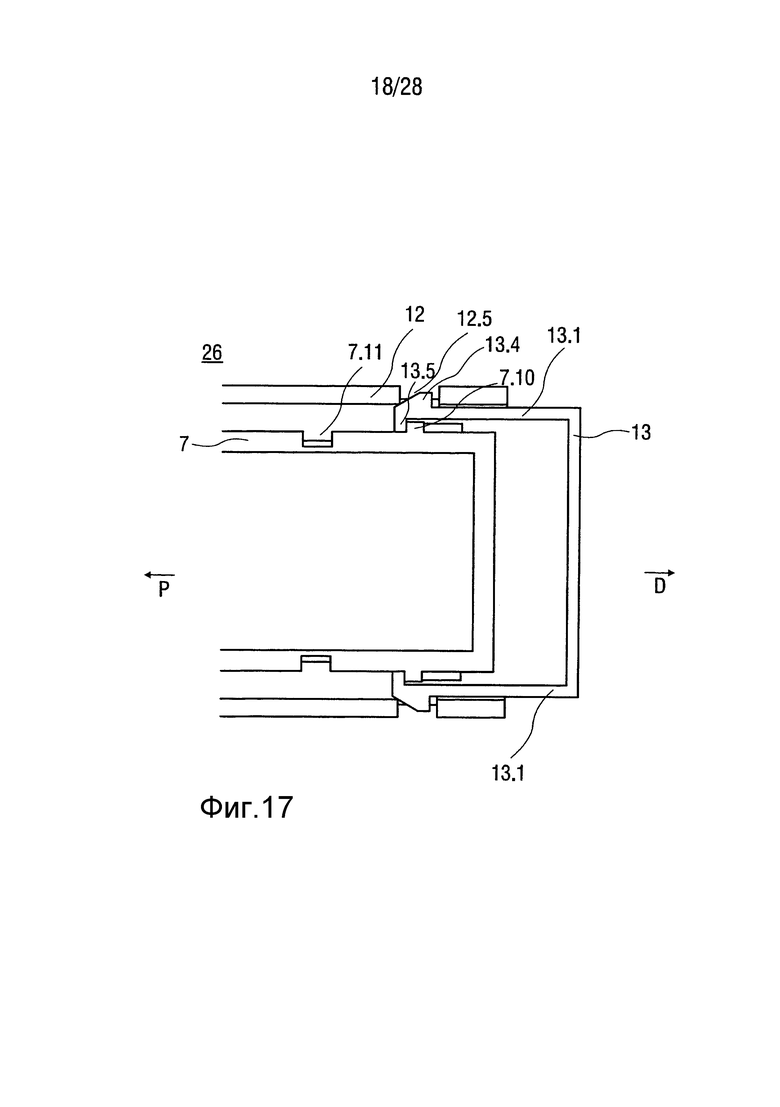
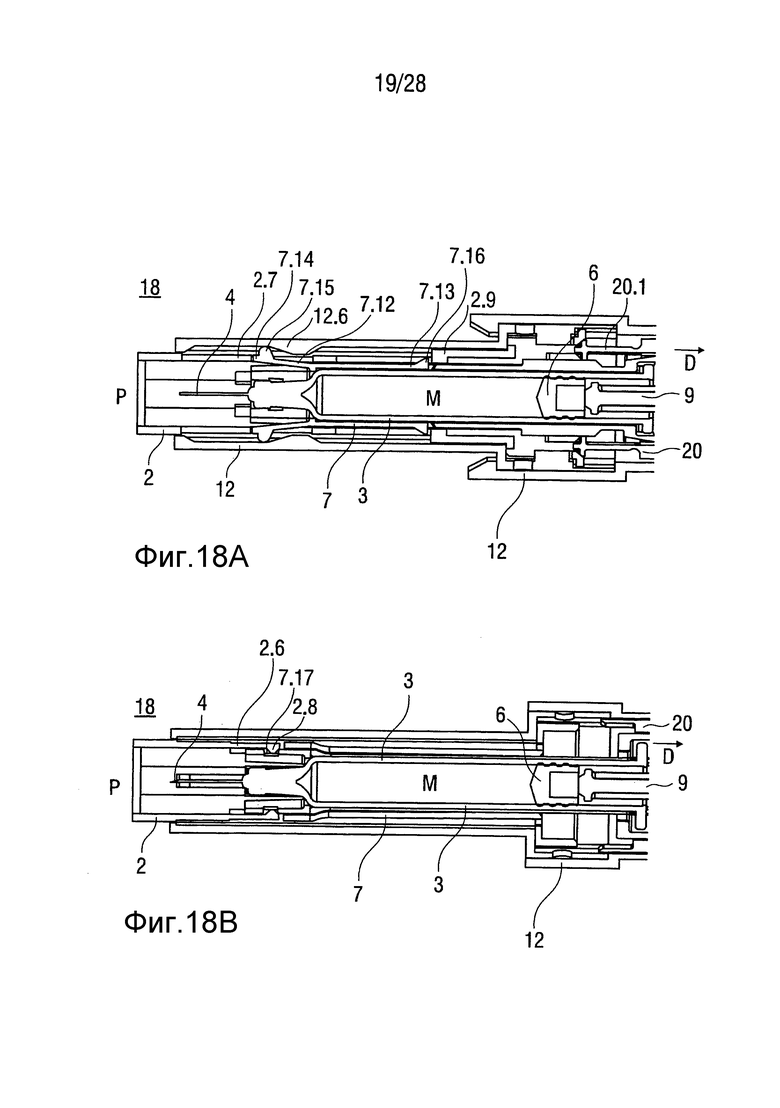
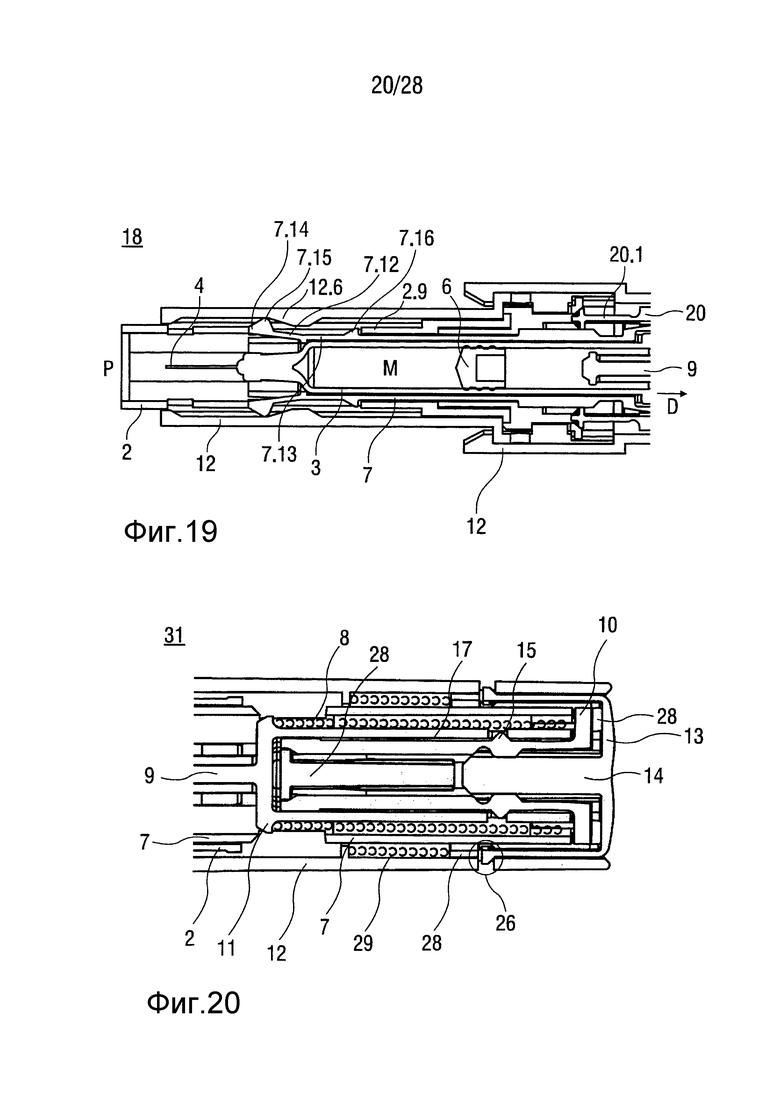
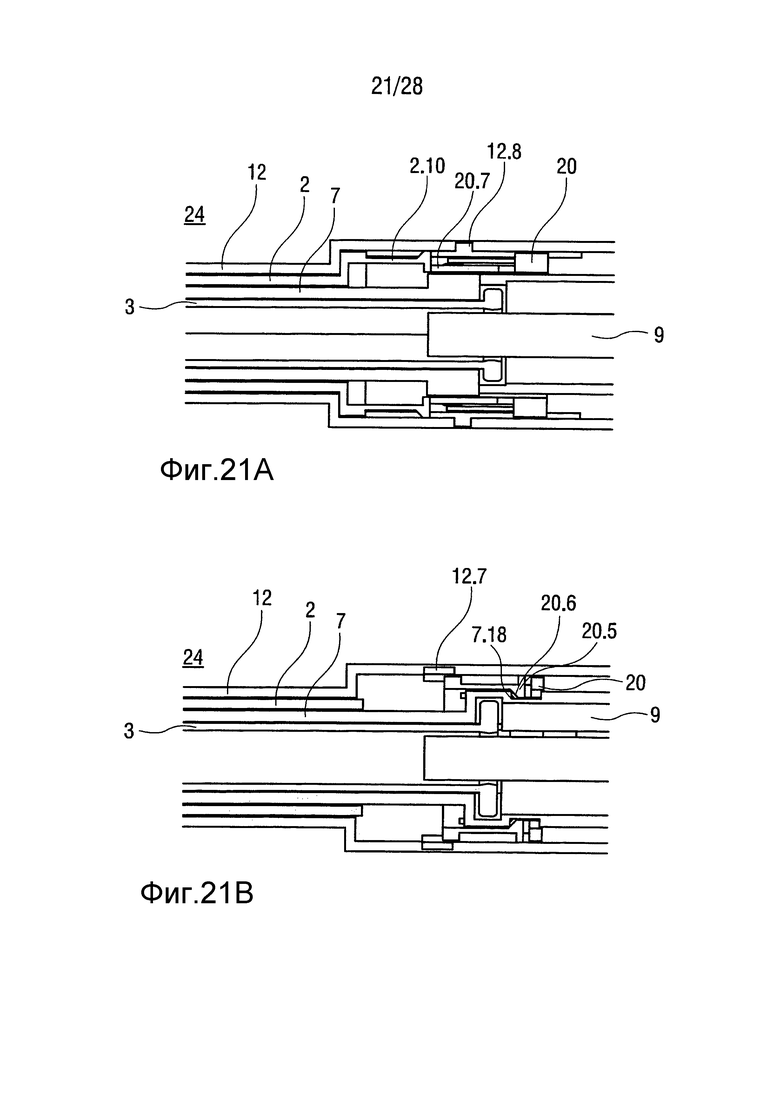
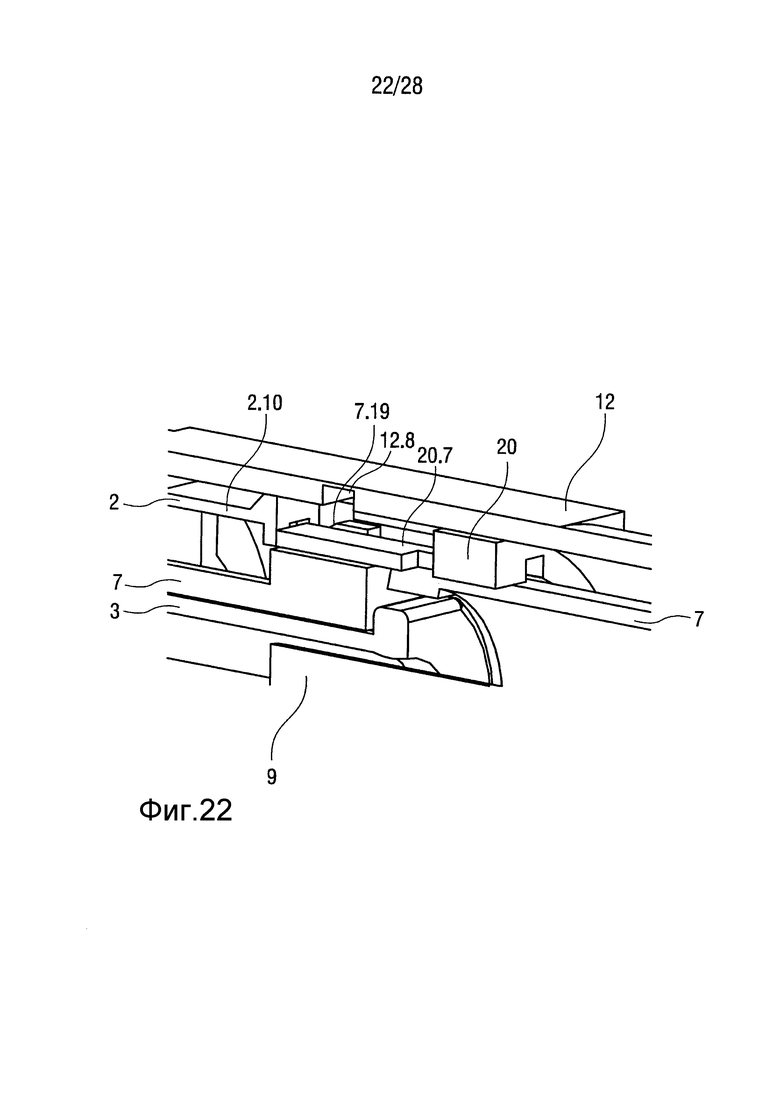
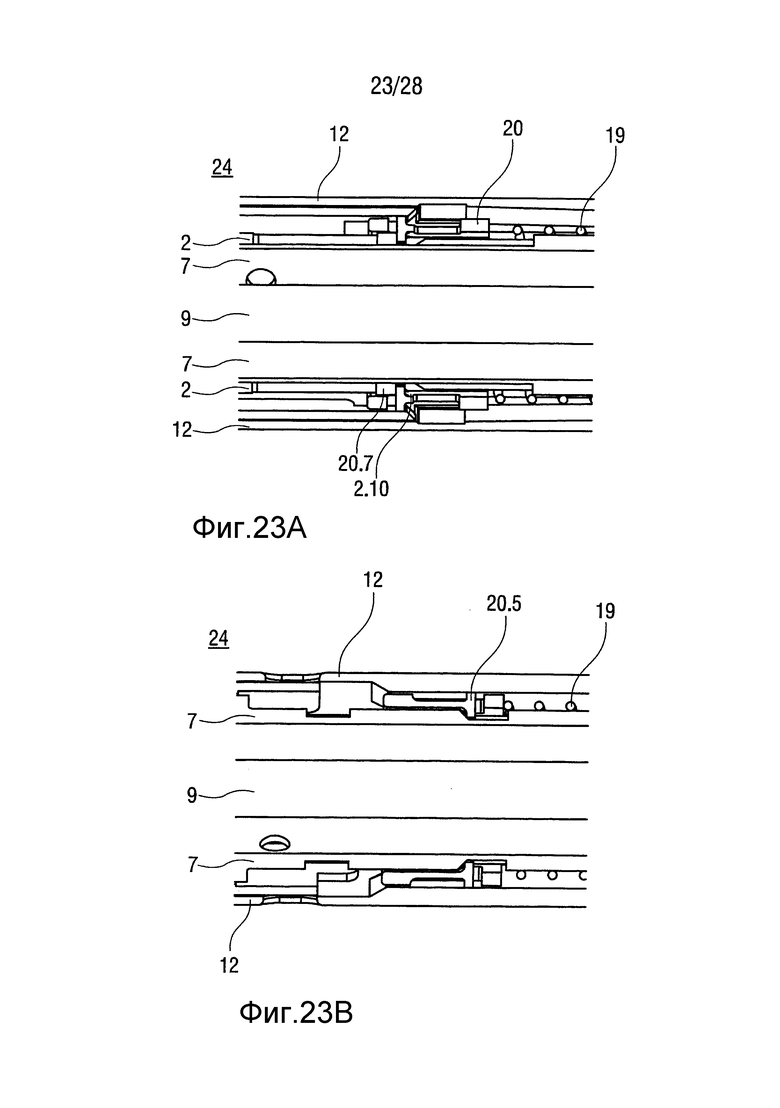
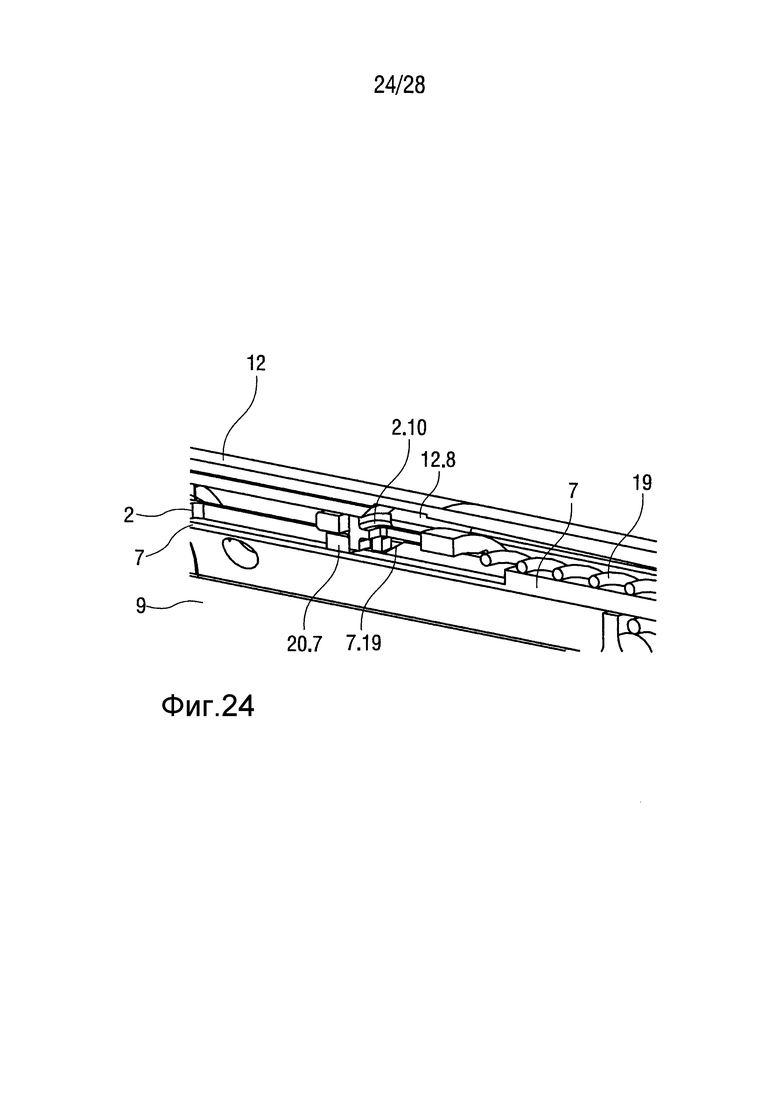
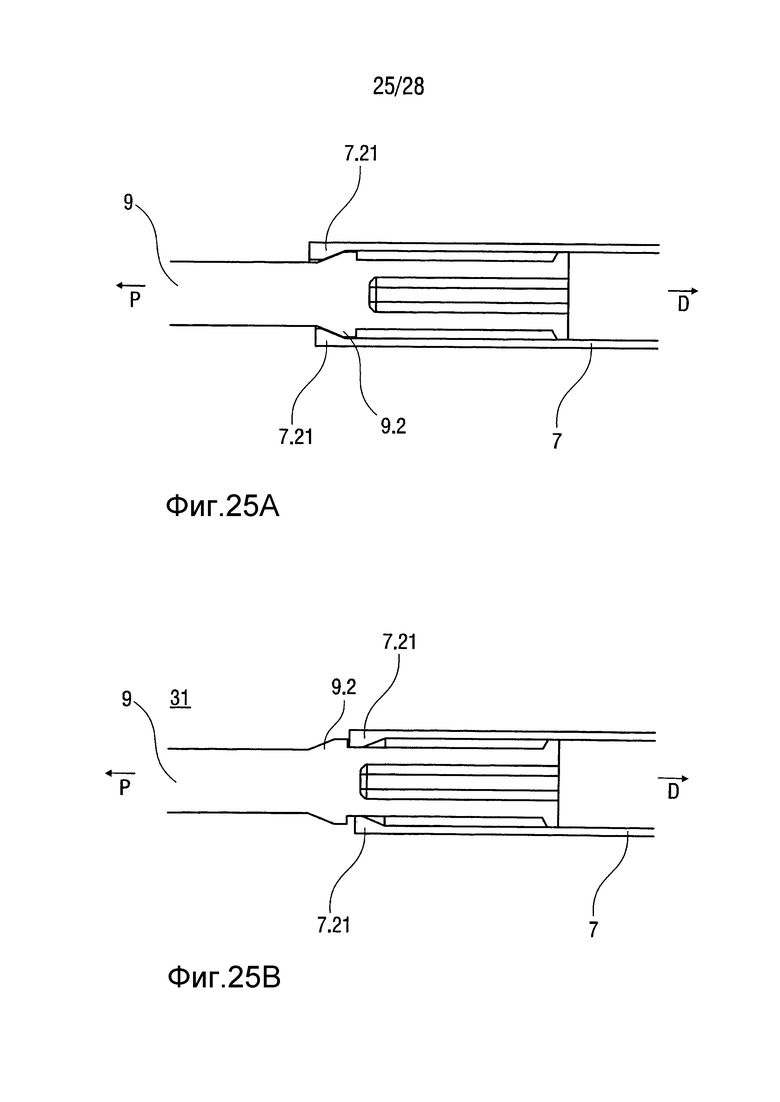
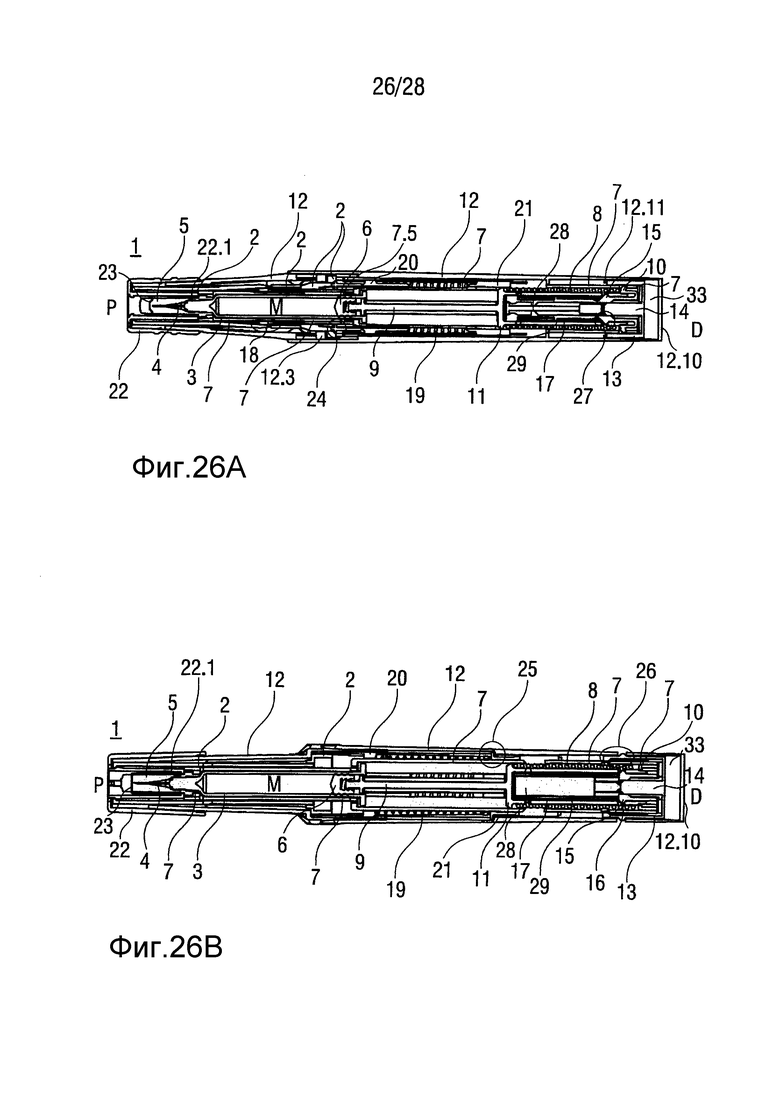
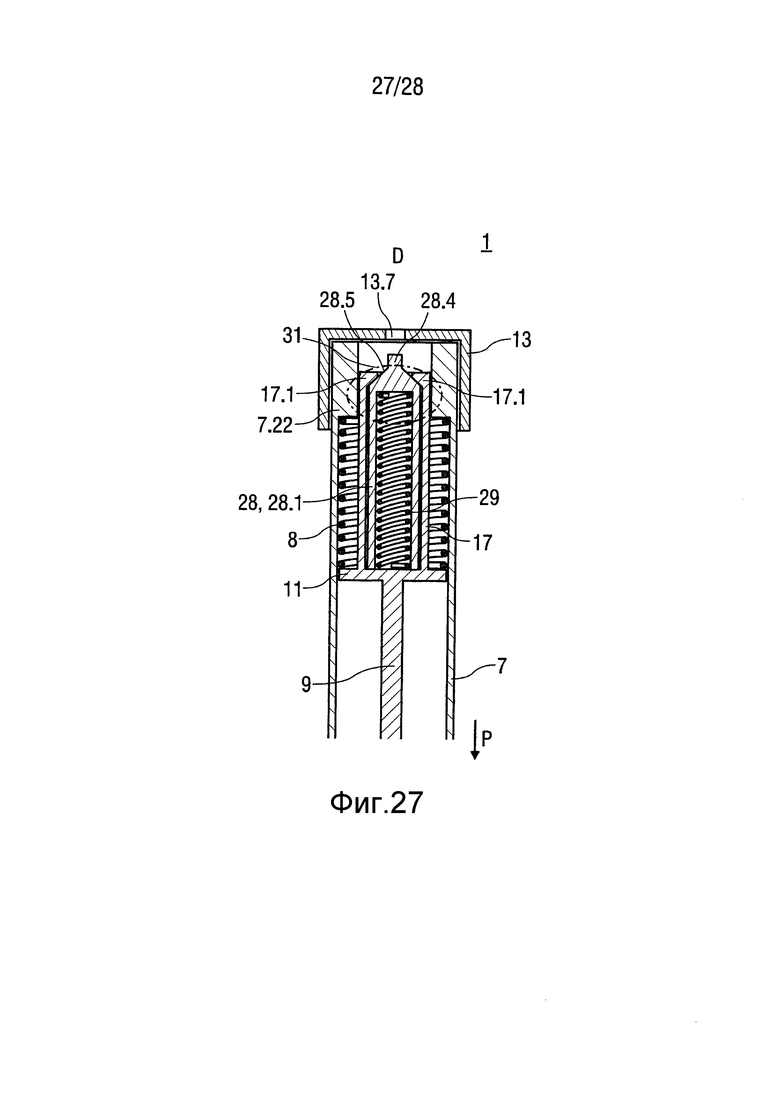
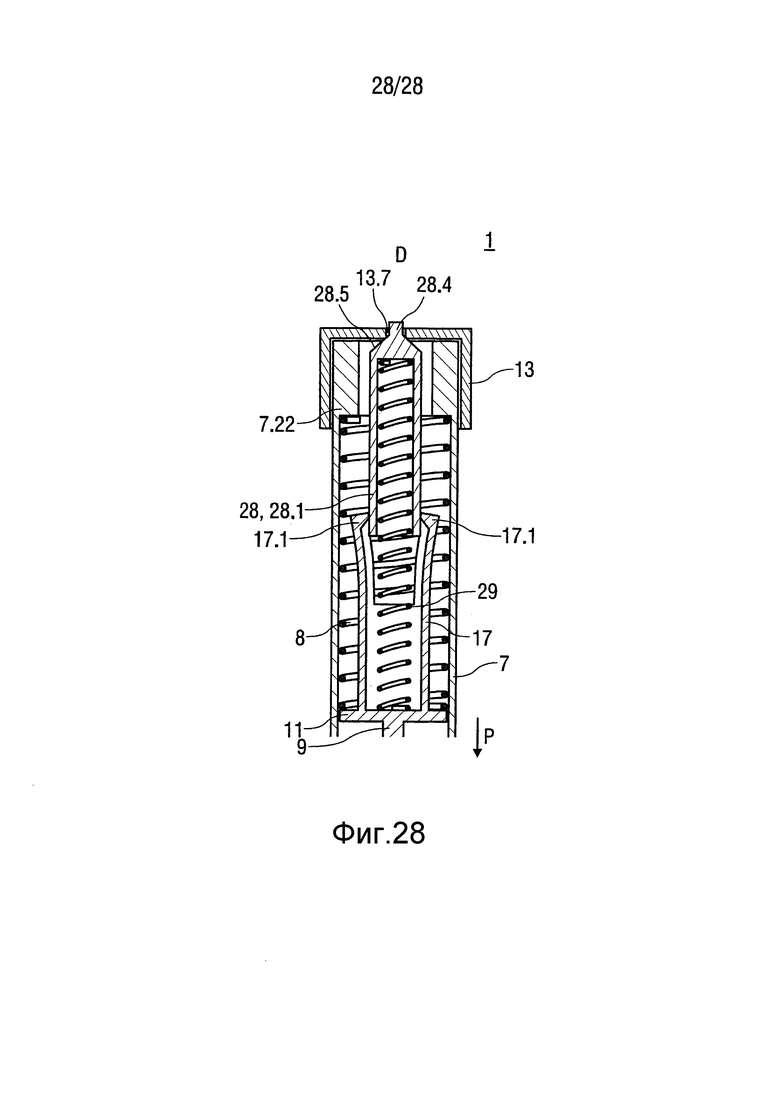
Изобретение относится к медицинской технике, а именно к инъекционным устройствам для введения дозы лекарственного вещества. Устройство содержит: корпус, имеющий проксимальный конец и дистальный конец; носитель, выполненный с возможностью размещения шприца; и пусковую кнопку. При этом в первом состоянии пусковая кнопка соединена с корпусом и/или носителем и упирается в дистальный конец корпуса. При этом в промежуточном состоянии корпус перемещается проксимально относительно носителя и пусковой кнопки, причем пусковая кнопка входит в зацепление с носителем. При этом во втором состоянии пусковая кнопка и носитель перемещаются проксимально относительно корпуса, причем пусковая кнопка выходит из зацепления с носителем и входит в зацепление с корпусом. 8 з.п. ф-лы, 28 ил.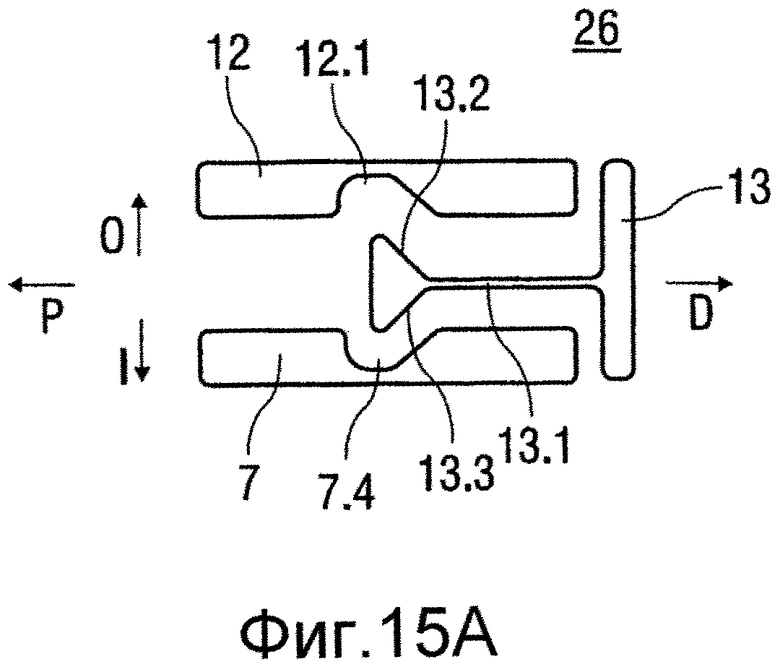
1. Инъекционное устройство для введения дозы лекарственного вещества (М), содержащее: корпус (12), имеющий проксимальный конец и дистальный конец;
носитель (7), выполненный с возможностью размещения шприца (3); и
пусковую кнопку (13),
при этом в первом состоянии пусковая кнопка (13) соединена с корпусом (12) и/или носителем (7) и упирается в дистальный конец корпуса (12),
при этом в промежуточном состоянии корпус (12) перемещается проксимально относительно носителя (7) и пусковой кнопки (13), причем пусковая кнопка (13) входит в зацепление с носителем (7),
при этом во втором состоянии пусковая кнопка (13) и носитель (7) перемещаются проксимально относительно корпуса (12), причем пусковая кнопка (13) выходит из зацепления с носителем (7) и входит в зацепление с корпусом (12).
2. Инъекционное устройство по п. 1, в котором пусковая кнопка (13) включает в себя отклоняемую балку (13.1), выполненную с возможностью зацепления с корпусом (12) и носителем (7).
3. Инъекционное устройство по п. 2, в котором корпус (12) включает в себя фиксатор (12.1) корпуса, выполненный с возможностью зацепления с балкой (13.1).
4. Инъекционное устройство по п. 3, в котором балка (13.1) включает в себя первый наклонный элемент (13.2), выполненный с возможностью зацепления с фиксатором (12.1) корпуса.
5. Инъекционное устройство по п. 3, в котором носитель (7) включает в себя фиксатор (7.4) носителя, выполненный с возможностью зацепления с балкой (13.1).
6. Инъекционное устройство по п. 5, в котором балка (13.1) включает в себя второй наклонный элемент (13.3), выполненный с возможностью зацепления с фиксатором носителя (7.4).
7. Инъекционное устройство по п. 5, в котором в первом состоянии балка (13.1) входит в зацепление с фиксатором (12.1) корпуса и/или фиксатором (7.4) носителя.
8. Инъекционное устройство по п. 3, в котором во втором состоянии балка (13.1) входит в зацепление с фиксатором (12.1) корпуса, причем балка (13.1) упирается в носитель (7).
9. Инъекционное устройство по п. 5, в котором в промежуточном состоянии балка (13.1) входит в зацепление с фиксатором (7.4) носителя, причем балка (13.1) упирается в корпус (12).
| RU2007127537 A, 27.02.2009 | |||
| US2009254036 A1, 08.10.2009 | |||
| WO2009063030 A1, 22.05.2009 | |||
| DE102007013836 A1, 25.09.2008. |

