Область техники, к которой относится изобретение
Изобретение относится к области сельскохозяйственных пресс-подборщиков для изготовления тюков посредством прессования сельскохозяйственного убираемого материала. Более конкретно, настоящее изобретение относится к большим пресс-подборщикам с тяжелым маховиком (например, 700 кг).
Уровень техники
Подавляюще большинство пресс-подборщиков не имеет своего собственного двигателя, но буксируется трактором, и приводится в действие за счет соединения вала отбора мощности (ВОМ) трактора с первичным валом пресс-подборщика. Пресс-подборщик дополнительно имеет маховик, соединенный с первичным валом, и редуктор, который приводит в движение различные механизмы в пресс-подборщике для подбора сельскохозяйственной культуры с поля, для формирования сельскохозяйственной культуры в тюки и для оборачивания шпагата и/или фольги вокруг тюков.
Между ВОМ и маховиком, как правило, расположена односторонняя муфта, позволяющая маховику вращаться быстрее, чем ВОМ. Первичный вал пресс-подборщика можно функционально отсоединять от ВОМ трактора, например, для транспортировки пресс-подборщика с одного поля на другое.
В пресс-подборщике требуется большой и тяжелый маховик, особенно в так называемых «больших квадратных пресс-подборщиках», или «пресс-подборщиках высокой плотности», для преодоления пиковых нагрузок, с которыми сталкивается редуктор пресс-подборщика, которые возникают, например, когда плунжер пресс-подборщика сдавливает убираемый материал в прессовальной камере при формировании тюков. За счет использования маховика с высокой инерцией и действующим на высокой скорости (например, 1000 об/мин), маховик может доставлять пиковую энергию для пиковых нагрузок, при этом он плавно замедляется в процессе каждого сжатия, и при этом снова ускоряется с помощью ВОМ трактора между двумя сжатиями. Однако высокая инерция маховика создает проблему при запуске пресс-подборщика. ВОМ, когда приводится в действие двигателем трактора со скоростью, с которой ему необходимо поворачиваться для приведения в действие пресс-подборщика в процессе нормальной работы, может быть не в состоянии обеспечивать высокий крутящий момент, необходимый для приведения маховика к его постоянной скорости (например, 1000 об/мин). В результате, когда пресс-подборщик сцепляют с трактором, а его маховик соединяют с ВОМ трактора, двигатель трактора может заглохнуть, или механизм безопасности может отключить ВОМ от двигателя трактора из-за высокой нагрузки на ВОМ при запуске пресс-подборщика.
Решение данной проблемы, предложенное в ЕР 1974601, состоит в использовании, при запуске маховика пресс-подборщика, в дополнение к крутящему моменту, предоставляемому ВОМ, гидравлического двигателя. Данное решение не является полностью удовлетворительным, потому что оно требует мощного гидравлического двигателя, с мощностью, сравнимой с мощностью ВОМ трактора.
Еще одно решение данной проблемы раскрыто в WO 2011060995, где описан трактор с коробкой передач, которая обеспечивает возможность запуска пресс-подборщика в две фазы. В первой фазе маховик ускоряется до первой скорости с использованием первого передаточного отношения коробки передач, а во второй фазе маховик ускоряется до второй скорости с использованием второго передаточного отношения коробки передач. Недостаток данной технологии состоит в том, что требуется трактор с коробкой передач.
Раскрытие изобретения
Задача вариантов осуществления представленного изобретения состоит в том, чтобы разработать пресс-подборщик с хорошим протеканием запуска и способ хорошего запуска данного пресс-подборщика.
Также задача вариантов осуществления представленного изобретения состоит в том, чтобы разработать комбинацию трактора и пресс-подборщика с хорошим протеканием запуска.
Вышеуказанные задачи осуществляются посредством способа и устройства согласно вариантам осуществления представленного изобретения.
В первом аспекте предложенного изобретения предлагается сельскохозяйственный пресс-подборщик, содержащий вал для соединения с отбором мощности, и маховик, соединенный с валом; плунжер, соединенный с маховиком посредством кривошипа, при этом плунжер выполнен с возможностью осуществления возвратно-поступательного движения между ближним положением, допускающим добавление убираемого материала в прессовальную камеру, и дистальным положением, подходящим для прессования убираемого материала в прессовальной камере; тормозную систему, выполненную с возможностью предоставления тормозного усилия для замедления маховика в зависимости от сигнала управления тормозами; по меньшей мере один датчик для выдачи данных датчика, указывающих по меньшей мере одну движущуюся часть пресс-подборщика; и систему управления тормозами, соединенную с по меньшей мере одним датчиком для получения данных датчика, и соединенную с тормозной системой для выдачи сигнала управления тормозами, при этом система управления тормозами содержит систему обработки, снабженную алгоритмом определения сигнала управления тормозами для остановки кривошипа в диапазоне заданных стартовых положений.
Преимущество подобного пресс-подборщика состоит в том, что он способен останавливать свой кривошип в подходящем стартовом положении, из которого гарантируется последующий запуск. Это обеспечивает возможность использования пресс-подборщиков с большим и тяжелым маховиком в комбинации с менее мощными тракторами, чем было возможно в прошлом. Вследствие того, что предотвращается остановка пресс-подборщика, использование данного пресс-подборщика является более эффективным, быстрым и безопасным.
В отличие от решения предшествующего уровня техники, где для решения проблемы запуска используют дополнительный двигатель, решение представленного изобретения основано на тормозной системе, что может показаться весьма противоречивым, и таким образом должно стать неожиданностью.
За счет использования тормозной системы по предложенному изобретению можно избежать этого дополнительного (мощного) пускового двигателя. В дополнение, тормозная система также может использоваться для удерживания в процессе транспортировки неподвижными движущиеся части пресс-подборщика, что является более безопасным.
Системой обработки, например, может быть программируемый цифровой процессор, например, ЦПУ или цифровой сигнальный процессор ЦСП и т.д.
Пресс-подборщик может содержать один или более датчиков. Возможны различные конфигурации, такие как например, датчик скорости, датчик абсолютного или относительного положения, бесконтактный датчик и их комбинации. Алгоритм может зависеть от используемого датчика, и может быть реализован в аналоговой или цифровой схеме, и может быть на основе непрерывного времени, опросной основе или на основе прерывания.
В случае, если предусмотрен более чем один датчик, может быть предусмотрено по меньшей мере два алгоритма, только один из которых является активным. Например, один предпочтительный алгоритм используется при условии, что оба функционируют правильно, а резервный алгоритм должен использоваться, если один из датчиков поврежден.
Алгоритм может быть основан на математическом моделировании по меньшей мере части пресс-подборщика. В модели может предполагаться, что вся кинетическая энергия движущихся частей пресс-подборщика находится в кривошипе, и что при каждом повороте кривошип проходит через зону трения и через зону сжатия.
В варианте осуществления сельскохозяйственного пресс-подборщика заданным диапазоном стартовых положений может быть диапазон угловых положений кривошипа, расположенного с угловым расстоянием, равным по меньшей мере 90° в направлении вперед от положения кривошипа, где плунжер достигает своего дистального положения, предпочтительно по меньшей мере 120°, более предпочтительно по меньшей мере 150°, наиболее предпочтительно по меньшей мере 180°.
За счет остановки кривошипа в заданном положении, из которого, при следующем запуске, он может повернуться по меньшей мере на 90° (или 120° или более) перед достижением своего дистального положения (соответствующего самому высокому давлению), маховик (и другие движущиеся части пресс-подборщика) могут получать достаточную кинетическую энергию, чтобы «выдержать» первое сжатие. Таким образом, риск остановки пресс-подборщика в процессе запуска может быть значительно понижен или даже полностью устранен.
Конечно, за счет удерживания движущихся частей пресс-подборщика в процессе транспортировки в фиксированном положении, первоначальное положение пресс-подборщика по прибытии на следующее поле остается тем же самым, что и положение, в котором пресс-подборщик остановился на предыдущем поле.
В варианте осуществления сельскохозяйственного пресс-подборщика алгоритм может выполняться с возможностью определения начального времени для прикладывания тормозного усилия на основании данных датчика.
Возможны различные алгоритмы, однако, во всех из них момент, подходящий для активации тормозной системы, определяется таким образом, чтобы кривошип останавливался в необходимом диапазоне положений.
В варианте осуществления сельскохозяйственного пресс-подборщика данные датчика могут указывать скорость кривошипа и положение кривошипа, а алгоритм может быть выполнен с возможностью определения, в качестве начального времени, времени, когда угловая скорость уменьшилась ниже пороговой скорости, так и положения, когда кривошип достигает порогового угла.
Это может быть реализовано в виде двухэтапного процесса: сначала мониторинг угловой скорости до тех пор, пока она не упадет ниже заданного порогового значения (без необходимости контроля углового положения), затем определение момента времени, когда кривошип находится в заданном угловом положении или прошел его (без необходимости контроля угловой скорости), или говоря математически: первый мониторинг, когда (ω<ωthr), затем мониторинг, когда (θ>θthr), и это момент начала торможения.
В варианте осуществления сельскохозяйственного пресс-подборщика, по меньшей мере один датчик может содержать бесконтактный датчик, расположенный под пороговым углом, а система обработки может быть соединена с блоком синхронизации. Алгоритм может быть выполнен с возможностью преобразования данных датчика в угловую скорость.
В данном варианте осуществления может использоваться единственный бесконтактный датчик. Время определяется, когда кривошип проходит заданное положение (например, положение датчика). (Средняя) угловая скорость (для первой стадии алгоритма) может определяться на основании временной разницы между двумя моментами времени. Момент начала торможения может быть определен, как момент, когда кривошип проходит заданное положение, при условии, что (средняя) скорость падает ниже заданного значения.
В варианте осуществления сельскохозяйственного пресс-подборщика по меньшей мере один датчик может представлять собой датчик абсолютного положения, выполненный с возможностью выдачи данных, указывающих угловое положение кривошипа, а алгоритм может быть выполнен с возможностью преобразования данных датчика в угловую скорость.
В данном варианте осуществления, можно использовать единственный датчик абсолютного положения. Скорость (необходимая для первой стадии алгоритма) может быть получена в виде временной производной абсолютного положения. Само абсолютное положение может использоваться во второй стадии алгоритма.
В варианте осуществления сельскохозяйственного пресс-подборщика по меньшей мере один датчик может представлять собой датчик относительного положения, выполненный с возможностью выдачи данных, указывающих относительное угловое положение кривошипа, а алгоритм может быть выполнен с возможностью преобразования данных датчика в угловую скорость. Алгоритм может быть выполнен с возможностью определения зоны сжатия, и с возможностью присвоения времени, соответствующего окончанию зоны сжатия, начального времени.
В данном варианте осуществления можно использовать единственный датчик относительного положения. Скорость (необходимая для первой стадии алгоритма) может быть получена в виде временной производной относительного положения. Информация о положении кривошипа может быть получена за счет мониторинга скорости, например, за счет проверки ее градиента, для выявления когда кривошип находится в так называемой «зоне сжатия». Подходящий момент может наступить, например, вскоре после того, как кривошип миновал зону сжатия.
В варианте осуществления сельскохозяйственного пресс-подборщика по меньшей мере один датчик может представлять собой датчик скорости, выполненный с возможностью выдачи данных, указывающих угловую скорость кривошипа, а алгоритм может быть выполнен с возможностью определения зоны сжатия, и с возможностью присвоения времени, соответствующего окончанию зоны сжатия, начального времени.
В данном варианте осуществления можно использовать единственный датчик скорости. Он очень похож на предыдущий вариант осуществления, за исключением того, что информацию о скорости получают непосредственно от датчика, таким образом, отсутствует необходимость в вычислении временной производной, что может быть легче реализовывать, и может потребовать меньшей вычислительной мощности.
Во втором аспекте настоящего изобретения предлагается способ остановки кривошипа сельскохозяйственного пресс-подборщика в диапазоне заданных стартовых положений, при этом пресс-подборщик содержит вал и маховик, соединенный с валом; плунжер, соединенный с маховиком посредством кривошипа, при этом плунжер выполнен с возможностью совершения возвратно-поступательного движение между ближним положением, в котором в прессовальную камеру может добавляться убираемый материал, и дистальным положением, в котором добавленный убираемый материал сдавливается в прессовальной камере; тормозную систему, выполненную с возможностью предоставления тормозного усилия для замедления маховика в зависимости от сигнала управления тормозами; по меньшей мере один датчик для выдачи данных датчика, указывающих по меньшей мере одну движущуюся часть пресс-подборщика; систему управления тормозами, соединенную с по меньшей мере одним датчиком для получения данных датчика и соединенную с тормозной системой для выдачи сигнала управления тормозами, при этом система управления тормозами содержит систему обработки, снабженную алгоритмом для выдачи сигнала управления тормозами для остановки кривошипа в диапазоне заданных стартовых положений. Способ включает этапы: а) определения начального времени на основании данных датчика; b) прикладывания тормозного усилия в определяемое начальное время.
За счет запуска торможения в подходящий момент и с подходящим, например, заданным, постоянным усилием, можно гарантировать, что кривошип остановится в подходящем диапазоне положений.
В варианте осуществления способа данные датчика указывают скорость кривошипа и положение кривошипа, а этап а) в качестве начального времени включает определение времени, когда угловая скорость уменьшилась ниже пороговой скорости, и при этом кривошип находится в положении внутри порогового угла или миновал его.
В варианте осуществления способа по меньшей мере один датчик представляет собой бесконтактный датчик, расположенный под пороговым углом, а система обработки соединена с блоком синхронизации; при этом этап (а) способа включает этапы: с) получения временного значения от блока синхронизации; d) преобразования данных датчика в угловую скорость.
В варианте осуществления может использоваться программируемый процессор, например, микроконтроллер или цифровой сигнальный процессор (DSP) со встроенным блоком таймера. Подобные процессоры имеются на рынке с различными градациями скорости (тактовая частота процессорного блока), и с различными размерами памяти (например, флэш, ЭСППЗУ, ОЗУ).
В варианте осуществления способа по меньшей мере один датчик представляет собой датчик абсолютного положения, выполненный с возможностью выдачи данных, указывающих угловое положение кривошипа, а этап (а) способа включает этап: с) преобразования данных датчика в данные угловой скорости.
Например, если данные датчика представляют собой информацию об абсолютном или относительном положении, данные скорости могут рассчитываться в виде временной производной данных датчика. Например, если данные датчика представляют собой временную метку, когда кривошип проходит заданное местоположение, то (пусть даже и средняя) угловая скорость может рассчитываться на основании временной разницы между двумя последовательными временными метками.
В варианте осуществления способа по меньшей мере один датчик представляет собой датчик относительного положения, выполненный с возможностью выдачи данных, указывающих относительное угловое положение кривошипа, а этап (а) способа включает этапы: с) преобразования данных датчика в данные угловой скорости, d) определения зоны сжатия в данных угловой скорости; е) присвоения времени, соответствующего окончанию зоны сжатия, начального времени.
В варианте осуществления способа по меньшей мере один датчик представляет собой датчик скорости, выполненный с возможностью выдачи данных, указывающих угловую скорость кривошипа, а этап (а) способа включает этап: d) определения зоны сжатия в данных угловой скорости; е) присвоения времени, соответствующего окончанию зоны сжатия, начального времени.
В третьем аспекте настоящего изобретения предлагается компьютерный программный продукт, который, при выполнении в системе обработки, предоставляет команды для выполнения любого одного из способов, описанных выше.
Конкретные и предпочтительные аспекты изобретения изложены в сопровождающих независимых и зависимых пунктах формулы изобретения. Признаки из зависимых пунктов формулы изобретения могут объединяться с признаками независимых пунктов формулы изобретения и с признаками других зависимых пунктов формулы изобретения по мере необходимости, а не единственно как точно изложено в формуле изобретения.
Данные и другие аспекты изобретения станут очевидны из варианта (вариантов) осуществления, описанных далее, и разъяснены со ссылкой на них.
Краткое описание чертежей
Изобретение будет дополнительно разъяснено посредством следующих чертежей.
ФИГ. 1 представляет собой вид сбоку классического трактора и буксируемого пресс-подборщика согласно предшествующему уровню техники.
ФИГ. 2 представляет собой увеличенное изображение части пресс-подборщика по Фиг. 1, на котором кривошип находится в неблагоприятном положении Е для запуска.
ФИГ. 3 представляет собой в увеличенное изображение части пресс-подборщика по Фиг. 1, на котором кривошип находится в благоприятном положении С для запуска.
ФИГ. 4 показывает пример скорости вращения и соответствующей кинетической энергии маховика порожнего пресс-подборщика при запуске.
ФИГ. 5 представляет собой схематичный чертеж варианта осуществления маховика и узла тормозного диска, которые могут использоваться в пресс-подборщике согласно варианту осуществления представленного изобретения, показанные на изображении сбоку.
ФИГ. 6 представляет собой вид спереди маховика и узла тормозного диска по Фиг. 5, дополнительно показывающий положение тормозной колодки.
ФИГ. 7 и ФИГ. 8 представляют собой изометрическое изображение варианта осуществления узла редуктора, содержащего редуктор и маховик, установленный на первичном валу редуктора, и тормозной диск, установленный на маховике, и тормозной суппорт, установленный на редукторе.
ФИГ. 9 представляет собой схематичный чертеж системы, содержащей трактор (справа) и пресс-подборщик (слева), при этом пресс-подборщик содержит контроллер торможения для остановки маховика регулируемым образом согласно варианту осуществления представленного изобретения.
ФИГ. 10 показывает схематичное представление движения кривошипа, с обозначением фрикционной зоны и зоны сжатия, согласно математической модели пресс-подборщика, который может использоваться в вариантах осуществления представленного изобретения.
ФИГ. 11 показывает схематичное представление движения кривошипа в процессе активного торможения маховика, от углового положения θ1 до углового положения Θ2.
ФИГ. 12 показывает пример регулируемого тормозного действия для пресс-подборщика с датчиком положения и датчиком скорости согласно варианту осуществления представленного изобретения. Фиг. 12(а) показывает угловую скорость кривошипа с течением времени, Фиг. 12(b) показывает угловое положение кривошипа с течением времени, Фиг. 12(с) показывает тормозное усилие, прикладываемое для остановки кривошипа в диапазоне заданных стартовых положений.
ФИГ. 13 показывает часть по Фиг. 12 в увеличенном виде.
ФИГ. 14 показывает пример регулируемого тормозного действия для пресс-подборщика с бесконтактным датчиком согласно варианту осуществления представленного изобретения. Фиг. 14(а) показывает рассчетную угловую скорость кривошипа, Фиг. 14(b) показывает угловое положение кривошипа с течением времени, Фиг. 14(с) показывает тормозное усилие, прикладываемое для остановки кривошипа в диапазоне заданных стартовых положений.
ФИГ. 15 показывает пример регулируемого тормозного действия для пресс-подборщика только с датчиком скорости, согласно варианту осуществления представленного изобретения. Фиг. 15(а) показывает угловую скорость кривошипа, Фиг. 15(b) показывает тормозное усилие, прикладываемое для остановки кривошипа в диапазоне заданных стартовых положений.
ФИГ. 16 показывает часть по Фиг. 15 в увеличенном виде.
ФИГ. 17 показывает систему обработки, содержащую команды для реализации аспектов способов согласно вариантам осуществления представленного изобретения.
Чертежи являются только схематичными, а не ограничивающими. На чертежах, размер некоторых элементов для иллюстративных целей может быть преувеличен, а не нарисован в масштабе.
Любые ссылочные позиции в формуле изобретения не следует истолковывать, как ограничение объема правовых притязаний.
На разных чертежах, одинаковые ссылочные обозначения относятся к одним и тем же или аналогичным элементам.
Подробное описание иллюстративных вариантов осуществления изобретения
Представленное изобретение будет описано в отношении конкретных вариантов осуществления и со ссылкой на некоторые чертежи, но изобретение ограничивается не ими, но только формулой изобретения. Описанные чертежи являются только схематичными, а не ограничивающими. На чертежах, размер некоторых элементов для иллюстративных целей может быть преувеличен, а не нарисован в масштабе. Размеры и относительные размеры не соответствуют фактическому уменьшению для применения изобретения на практике.
Кроме того, термины первый, второй и тому подобное в описании и в формуле изобретения, используются для проведения различия между аналогичными элементами и не обязательно для описания последовательности, либо во времени, в пространстве, в ранжировании, либо любым другим образом. Необходимо понять, что термины, используемые таким образом, являются взаимозаменяемыми в соответствующих обстоятельствах и что варианты осуществления изобретения, описанные в данном документе, допускают работу в других последовательностях, чем описано или проиллюстрировано в данном документе.
Кроме того, термины «сверху», «под» и «тому подобное» в описании и формуле изобретения используют для описательных целей и не обязательно для описания относительных положений. Необходимо понять, что термины, используемые таким образом, являются взаимозаменяемыми в соответствующих обстоятельствах и что варианты осуществления изобретения, описанные в данном документе, допускают работу в иных ориентациях, чем описано или проиллюстрировано в данном документе.
Необходимо отметить, что термин «содержащий», используемый в формуле изобретения, не следует интерпретировать, как ограничение значениями, перечисленными далее; он не исключает других элементов или стадий. Таким образом, его следует интерпретировать в качестве уточнения наличия изложенных признаков, целых чисел, стадий или составных элементов, на которые делается ссылка, но он не исключает наличие или добавление одного или более других признаков, целых чисел, стадий или составных элементов или их групп. Таким образом, объем правовых притязаний выражения «устройство, содержащее средство А и В не следует ограничивать устройствами, состоящими только из составных элементов А и В. Это означает, что в отношении представленного изобретения, единственными уместными составными элементами устройства являются А и В.
Ссылка по всему данному описанию на «один вариант осуществления» или «вариант осуществления» означает, что конкретный признак, конструкция или характеристика, описанная в связи с вариантом осуществления, включена по меньшей мере в один вариант осуществления представленного изобретения. Таким образом, появления фраз «в одном варианте осуществления» или «в варианте осуществления» в различных местах по всему данному описанию не обязательно все ссылаются на один и тот же вариант осуществления, но могут ссылаться. Кроме того, конкретные признаки, конструкции или характеристики могут быть объединены любым подходящим образом, как будет очевидно рядовому специалисту в данной области техники из данного раскрытия, из одного или более вариантов осуществления.
Аналогичным образом следует отметить, что в описании иллюстративных вариантов осуществления изобретения, различные признаки изобретения иногда группируют вместе в едином варианте осуществления, фигуре или его описании с целью оптимизации раскрытия и помощи в понимании одного или более различных аспектов изобретения. Однако, данный способ раскрытия не следует интерпретировать, как отражение намерения, чтобы заявленное изобретение требовало больше признаков, чем явно изложено в каждом пункте. Скорее, как отражает следующая формула изобретения, аспекты изобретения заключаются меньше чем во всех признаках единственного раскрытого выше варианта осуществления. Таким образом, формула изобретения вслед за подробным описанием явным образом включена настоящим в данное подробное описание, при этом каждый пункт сам по себе остается в качестве отдельного варианта осуществления данного изобретения.
Кроме того, несмотря на то, что некоторые варианты осуществления, описанные в данной заявке, включают некоторые, но не другие признаки, содержащиеся в других вариантах осуществления, комбинации признаков различных вариантов осуществления подразумеваются попадающими в пределы объема правовых притязаний изобретения, и образуют различные варианты осуществления, как будет понятно специалистам в данной области техники. Например, в следующей формуле изобретения, любой из заявленных вариантов осуществления может использоваться в любой комбинации.
В описании, предоставленном в данной заявке, изложено множество конкретных подробностей. Однако, следует понимать, что варианты осуществления изобретения могут быть реализованы на практике без данных конкретных подробностей. В других случаях, хорошо известные способы, конструкции и технологии не были показаны подробно для того, чтобы не затруднять понимание данного описания.
Когда в вариантах осуществления представленного изобретения делается ссылка на «нормальное направление» или «направление вперед» первичного вала или маховика или кривошипа пресс-подборщика, делается ссылка на направление вращения маховика в процессе нормального изготовления тюков.
Когда в вариантах осуществления представленного изобретения делается ссылка на «нормальную работу пресс-подборщика», подразумевается состояние пресс-подборщика, в котором маховик вращается для изготовления тюков.
Когда в вариантах осуществления представленного изобретения делается ссылка на «обратное направление» или «направление назад» первичного вала или маховика или кривошипа пресс-подборщика, делается ссылка на направление вращения, противоположное нормальному направлению.
Когда в вариантах осуществления представленного изобретения делается ссылка на «воздействие плунжера на убираемый материал», делается ссылка на момент времени, в который противодействующая сила, прикладываемая к плунжеру прессуемым убираемым материалом, превышает некоторое пороговое значение, например, превышает 25 кН.
Когда в вариантах осуществления представленного изобретения делается ссылка на «тюки высокой плотности», делается ссылка на тюки, имеющие плотность выше чем приблизительно 100 кг/м3, например, имеется в виду выше чем 190 кг/м3.
Когда в вариантах осуществления представленного изобретения делается ссылка на «дисковый тормоз», делается ссылка на устройство для замедления или остановки вращения колеса, когда оно находится в движении. В данной заявке делается ссылка на дисковые тормоза с суппортом, а также на дисковые тормоза барабанного типа. Дисковый тормоз с суппортом содержит тормозной диск и суппорт, при этом тормозной суппорт содержит две тормозные колодки, подлежащие прижиманию к боковым сторонам диска.
В данной области техники известны сельскохозяйственные пресс-подборщики, относящиеся к типу, который можно буксировать и приводить в действие посредством ВОМ трактора. Со ссылкой на чертежи, фиг. 1 показывает пример сельскохозяйственного пресс-подборщика 70, содержащего раму 25, которая оборудована на своем переднем конце продолжающимся вперед дышлом 26 со сцепным средством (не показано) для соединения пресс-подборщика 70 с буксирующим трактором 17. Подбирающий узел 27 поднимает с поля уложенный в валки убираемый материал по мере того, как пресс-подборщик 70 движется мимо него, например, буксируемый трактором, и доставляет подобный материал к переднему концу изогнутого назад и вверх, формирующего партии подающего трубопровода 28. Трубопровод 28 сообщается на своем верхнем конце с находящейся сверху, продолжающейся продольно прессовальной камерой 80, в которую загружают партии сельскохозяйственной культуры с помощью действующего циклически набивочного механизма 29. Действующий непрерывно уплотняющий механизм 24 на нижнем переднем конце подающего трубопровода 28 непрерывно подает и уплотняет материал в трубопровод 28 таким образом, чтобы заставлять партии убираемого материала приобретать и принимать внутреннюю конфигурацию трубопровода 28 перед периодическим зацеплением набивочным механизмом 29 и введением вверх в прессовальную камеру 80. Уплотняющий механизм 24 может быть заменен роторным механизмом, который также не будет непрерывно подавать и утрамбовывать материал в трубопровод 28. Подающий трубопровод 28 может быть оборудован средством (не проиллюстрированным) для установления, была ли в нем образована полная партия, и для управления в ответ на это набивочным механизмом 29. Каждое действие набивочного механизма 29 вводит «партию» или «ворох» убираемого материала из трубопровода 28 в камеру 80.
Плунжер 13 движется возвратно-поступательно в продольном направлении внутри прессовальной камеры 80, по меньшей мере внутри первой ее части. Биомасса, подаваемая через подающий трубопровод 28, прессуется за счет этого, например, сдавливается или обрабатывается иным образом, с тем чтобы образовывать тюки при описанной выше работе сельскохозяйственного пресс-подборщика 70. Формируются тюки с кубической формой, также известные как «прямоугольные тюки». Затем сформированные тюки могут передвигаться вперед за счет возвратно-поступательного движения плунжера 13 со сдвигом периодически и постепенно вдоль прессовальной камеры 80 в направлении выпускного отверстия, из которого тюки в конечном итоге должны выбрасываться. Кроме того, пресс-подборщик 70 может содержать составные элементы, такие как узловязальный механизм, для автоматического завязывания завершенных тюков, например, шпагатом или аналогичным линейным изделием, чтобы сделать их устойчивыми, например, для транспортировки и хранения. После увязывания, тюки выгружаются из выпускного отверстия прессовальной камеры 80 на выгрузное устройство 31, в виде спускного желоба, обозначенного в общем 31, для плавного опускания тюков на уровень земли.
Большие пресс-подборщики 70, особенно прямоугольные пресс-подборщики 70 для изготовления тюков высокой плотности имеют маховик 2 с относительно большим диаметром (например, в диапазоне от 75 до 130 см, например, 110 см) и большой массой (например, в диапазоне от 300 до 1000 кг, например, 700 кг) для получения высокой инерционной массы или энергетического эквивалента. Когда весь убираемый материал с одного поля спрессован в тюки, пресс-подборщик 70 временно останавливается, например, за счет отсоединения или отключения ВОМ трактора, так что маховик 2 будет замедляться до тех пор, пока не остановится, и связанные функции, такие как подбирающий, утрамбовывающий или набивочный механизмы отключаются наряду с маховиком 2. Затем пресс-подборщик 70 переводят на другое поле, обычно несмотря на то, что в прессовальной камере 80 все-таки остается некоторое количество убираемого материала. По прибытии на следующее поле, подлежащее уборке, необходимо снова запустить пресс-подборщик 70, но было обнаружено, особенно у больших пресс-подборщиков, имеющих большой и тяжелый маховик 2, что вследствие высокой инерции маховика 2 могут возникать проблемы, особенно когда в прессовальной камере 80 все-таки остается убираемый материал, что может иметь место, поскольку пресс-подборщики 70 не всегда опорожняют между разными полями.
Авторы изобретения обнаружили, что проблема с запуском возникает, когда маховик 2 не «выдерживает» первое воздействие плунжера на убираемый материал, т.е. когда плунжер 13 стопориться в процессе первого сжатия убираемого материала в прессовальной камере 80, вскоре после запуска и не способен завершить весь первый цикл плунжера. Пример подобного положения запуска проиллюстрирован на фиг. 2, показывающей первоначальное состояние кривошипа 6 и плунжера 13 непосредственно перед запуском пресс-подборщика 70. В примере фиг. 2, кривошип 6 расположен на угловом расстоянии Θ1, равном приблизительно 45°, относительно положения, которое кривошип 6 принял бы, когда плунжер 13, находится в своем дистальном положении 8 внутри прессовальной камеры 80. Когда пресс-подборщик 70 запускают из данного первоначального состояния кривошипа 6 и плунжера 13, маховик 2 не может получить достаточную скорость перед тем, как плунжер 13 столкнется или достигнет убираемого материала 18, например, соломы, в прессовальной камере 80, а двигатель трактора заглохнет, или механизм безопасности отсоединит ВОМ 15 от двигателя трактора, результатом чего является неудача запуска пресс-подборщика 70.
В процессе испытаний, авторы изобретения заметили, что, при выключении пресс-подборщика 70, и предоставлении ему возможности свободно замедляться, маховик 2 и кривошип 6 стремились автоматически поворачиваться в неблагоприятное состояние, например, положение А или Е кривошипа на фиг. 2, соответствующее углу Θ1, равному приблизительно 90° и приблизительно 45°, соответственно, в результате силы тяжести, действующей на тяжелые плечи 6 кривошипа.
Авторы изобретения также обнаружили, что когда пресс-подборщик 70 запускали из благоприятного положения кривошипа, например, положения С кривошипа на фиг. 3, было обнаружено, что запуск пресс-подборщика 70 никогда не был неудачным. В положении С фиг. 3, кривошип 6 показывает угол Θ2 при угловом расстоянии, равном приблизительно 300° относительно положения, которое кривошип 6 принял бы после поворота маховика 2 в направлении F вперед до тех пор, пока плунжер 13 не достигнет своего дистального положения 8 внутри прессовальной камеры 80.
Данное поведение дополнительно исследовали, и измеряли протекание запуска маховика 2 комбинации конкретного пустого пресс-подборщика 70 и конкретного трактора 17, при этом запуск иногда не удавался, как показано на фиг. 4. Специалист в данной области техники легко может построить аналогичные кривые для других комбинаций трактора 17 и пресс-подборщика 70, конечно при условии, что трактор 17 обладает достаточной мощностью для запуска пресс-подборщика 70 в наилучших условиях. В конкретном случае фиг. 4, пустой пресс-подборщик 70 запускали с кривошипом 6 в положении А, но также может использоваться другое положение запуска, при этом измеряли угловую скорость ω(t) маховика 2, и построили график, как показано на фиг. 4. На горизонтальной оси относительное угловое положение Θ кривошипа 6 показано относительно его положения запуска. Угловая скорость ω(t) маховика 2 показана на левой вертикальной оси, тогда как соответствующая кинетическая энергия маховика 2 показана на правой вертикальной оси. Следует отметить, что благодаря передаточному отношению редуктора, маховик 2 поворачивается много раз на каждый поворот кривошипа. Показан только первый полный поворот кривошипа 6 после запуска, что соответствует множеству поворотов маховика 2, например, заданному количеству в диапазоне от 18 до 28 поворотов. Как видно на фиг. 4, после поворота кривошипа 6 на 30°, кинетическая энергия Е1 маховика 2 после запуска составляет приблизительно 10 кДж, а угловая скорость ω1 маховика 2 составляет приблизительно 110 об/мин. Когда кривошип 6 поворачивается на 270°, кинетическая энергия Е2 маховика 2 составляет приблизительно 115 кДж, а угловая скорость ω2 маховика 2 составляет приблизительно 380 об/мин. Точные цифры не важны, но из данного примера ясно, что чем больше времени имеет пресс-подборщик перед первым воздействием, тем больше угловая скорость. В примере, показанном на фиг. 4, соотношение ω2/ω1 угловых скоростей составляет приблизительно 380/110=3,45, но так как кинетическая энергия (только для вращательного движения) пропорциональна квадрату угловой скорости, соотношение Е2/Е1 кинетических энергий составляет приблизительно 115/10=11,5. Данный пример показывает, что, при запуске из благоприятного положения запуска (называемого также «стартовое положение»), такого как например, положение кривошипа на фиг. 3, кинетическая энергия маховика 2 перед первым воздействием плунжера 13 на убираемый материал 18 внутри прессовальной камеры 80 может быть увеличена в 11,5 раз (более чем в десять), по сравнению с запуском из неблагоприятного положения, такого например, положение А маховика на фиг. 3. Следует отметить, что кривая кинетической энергии, показанная на фиг. 4, по меньшей мере для первого поворота кривошипа 6, равномерно увеличивается с углом Θ вала кривошипа. Таким образом, чем больше значение Θ, тем большую кинетическую энергию будет иметь маховик 2 перед «первым воздействием», т.е. перед тем, как плунжер 13 достигнет своего дистального положения 8 в камере 80 пресс-подборщика.
Принципом представленного изобретения является предоставление пресс-подборщика 70, в котором маховик 2 получает достаточную кинетическую энергию перед первым воздействием плунжера 13 на убираемый материал 18 в прессовальной камере 80, или, говоря более точно, поскольку количеством убираемого материала 18 в прессовальной камере может быть переменное количество, и который может даже отсутствовать перед тем, как плунжер 13 достигнет своего дистального положения 8 (см., фиг. 3). Это получается следующим образом: вместо того, чтобы позволять маховику 2 замедляться самому по себе при отключении, в данном случае кривошип 6 может остановиться в любом положении, к маховику 2 прикладывают регулируемое тормозное усилие таким образом, чтобы маховик 2 и кривошип 6 останавливались в заданном (благоприятном) диапазоне стартовых положений.
Заданный диапазон стартовых положений определяют, как диапазон угловых положений Θ кривошипа 6, расположенных с угловым расстоянием, равным по меньшей мере 90° и самое большее 360°, измеренным в направлении F вперед, от положения кривошипа, где плунжер 13 достигает своего дистального положения 8, предпочтительно по меньшей мере 120°, предпочтительно по меньшей мере 150°, предпочтительно по меньшей мере 180°, предпочтительно по меньшей мере 210°, предпочтительно по меньшей мере 240°, предпочтительно по меньшей мере 270°, предпочтительно по меньшей мере 300°. При положении с большим угловым расстоянием, маховик 2 будет иметь больше энергии перед воздействием плунжера.
За счет запуска в следующий раз из данного благоприятного стартового положения, риск проблем при запуске снижается, или даже полностью устраняется, потому что, как показано выше на фиг. 4, к тому времени, когда плунжер 13 достигает убираемого материала 18, маховик 2 будет иметь достаточную приобретенную кинетическую энергию для сдавливания убираемого материала 18 и продолжения вращения, другими словами, он «выдерживает» первое воздействие). В процессе первого сжатия, маховик 2 будет терять часть своей кинетической энергии (например, порядка 0-75 кДж, в зависимости от количества и состояния убираемого материала 18 в прессовальной камере 80), но благодаря запуску из заданного стартового положения, будет оставаться достаточное количество кинетической энергии, несмотря на потерю энергии в процессе первого сжатия, так что маховик 2 будет продолжать вращение. Как правило, маховик 2 будет замедляться в процессе первого сжатия до момента, когда плунжер 13 достигает своего дистального положения 8, а затем будет снова ускоряться для увеличения своей кинетической энергии для следующего сжатия. Так как кривошип 6 имеет почти полный поворот перед вторым сжатием, он не будет только восполнять потерю энергии в процессе первого воздействия, но будет дополнительно ускоряться и т.д., и продолжать ускорение в процессе следующих поворотов до тех пор, пока маховик 2 не достигнет своей номинальной скорости (например, 1000 об/мин).
Для того, чтобы остановить маховик 2 и кривошип 6 в диапазоне заданных стартовых положений, для остановки маховика 2 в пресс-подборщик 70 добавляют тормозную систему (например, дисковую тормозную систему 40), и систему 47 управления тормозами для прикладывания подходящего тормозного усилия. Дисковый тормоз 40 может включаться любым известным путем, например, механически, гидравлически, пневматически или электромагнитно.
В дальнейшем, со ссылкой на Фиг. 5-Фиг. 9, будет описан первый пример тормозной системы маховика. Затем будет описана и проиллюстрирована на Фиг. 10 и Фиг. 11 математическая модель кинетических свойств пресс-подборщика 70 в процессе отключения. В заключение будут описаны и проиллюстрированы на Фиг. 12 Фиг. 16 некоторые практические примеры.
КОМПОНОВКА ДИСКОВОГО ТОРМОЗА МАХОВИКА:
На Фиг. 5 и Фиг. 6 схематично проиллюстрирован пример компоновки дискового тормоза и маховика. Дисковой тормозной системой 40, показанной на Фиг. 5, является дисковый тормоз с суппортом. Он содержит тормозной диск 41 и суппорт 51, содержащий два дисковых когтя 42, при этом каждый коготь имеет тормозную колодку 58 для контакта с боковой стороной тормозного диска 41. Дисковые тормозные системы 40 хорошо известны в данной области техники, и вследствие этого нет необходимости дополнительно их здесь описывать. Также могут использоваться другие типы дисковых тормозов, например, дисковый тормоз барабанного типа. Следует отметить, что Фиг. 5 и Фиг. 6 являются только схематичными чертежами, они нарисованы не в масштабе, но только иллюстрируют принципы изобретения. Фиг. 7 и Фиг. 8 показывают 3D-CAD чертежи примера узла редуктора, содержащего редуктор 46, маховик 2, тормозной диск 41, установленный на маховик 2, и тормозной суппорт 51, установленный на редуктор 46 и выполненный с возможностью сцепления с тормозным диском 41. Дисковые тормозные системы 40 с суппортом имеют преимущество в том, что торможение можно лучше регулировать, потому что тормозное усилие пропорционально давлению, прикладываемому к тормозной колодке 58 тормозной системой, например, усилителем тормоза. Фиг. 9 представляет собой схематичный чертеж пресс-подборщика 70, содержащего компоновку маховика и дискового тормоза Фиг. 5, и контроллер 47 торможения. Команда торможения может подаваться локальным устройством 44 ввода, или необязательно дистанционным устройством 45 ввода, соединенным с контроллером 14 трактора, который может быть соединен с контроллером 47 торможения. Тормозным суппортом 51 в примере Фиг. 9 является гидравлический суппорт, гидравлически соединенный с гидравлической системой 49 пресс-подборщика 70 посредством гидравлических трубопроводов 54 и управляющего клапана 53. Тормозной суппорт 51, может содержать два или более поршней, называемых также 'pots'. Тормозное усилие регулируется посредством управляющего клапана 53, который регулируют с помощью контроллера 47 торможения, который может быть частью интегрированного контроллера пресс-подборщика (не показано). Контроллером 47 торможения может быть, например, электронный контроллер, выполненный с возможностью активации или отключения тормозного суппорта 51 с помощью заданного тормозного усилия, которым может быть постоянное или переменное усилие. Также с контроллером 47 торможения соединен по меньшей мере один датчик 43 для определения параметра пресс-подборщика 70, такого как например, угловая скорость кривошипа 6, угловая скорость маховика 2, угловое положение кривошипа 6, угловое положение маховика 2, положение плунжера 13, скорость плунжера 13. По меньшей мере одним датчиком 43 также может быть бесконтактный датчик, например, магнитный или индуктивный или ИК датчик для определения, когда кривошип 6 или плунжер 13 проходит заданное положение.
МАТЕМАТИЧЕСКАЯ МОДЕЛЬ:
Кинетические свойства пресс-подборщика 70 в процессе отключения могут быть описаны посредством математических формул, которые могут использоваться контроллером 47 торможения для прогнозирования протекания пресс-подборщика 70 для того, чтобы определить подходящее тормозное усилие и/или подходящее время для запуска торможения таким образом, чтобы пресс-подборщик 70 останавливался в диапазоне заданных стартовых положений. Когда пресс-подборщик 70 отсоединяется от ВОМ 15 трактора, и действует свободно, в пресс-подборщик 70 не поступает никакая энергия, и к пресс-подборщику 70 применима следующая формула, выражающая сохранение энергии при замедлении:

Когда торможение не применяется.
Рассматривая сначала случай, когда торможение не применяется, таким образом принимают Ebrake=0. Как показано на Фиг. 10, при каждом вращении кривошипа 6, часть кинетической энергии Ekin, находящейся первоначально в системе (главным образом в маховике 2), преобразуется в тепло за счет прессования убираемого материала 18 в прессовальной камере 80, а другая часть за счет трения, обозначенные как Ecompr и Efriction, соответственно. За счет оценки формулы (1) в два момента времени, когда кривошип 6 делает один полный оборот, и при условии, что сжатие происходит в первом угловом диапазоне (например, от 90° до 0°), и при условии, что трение возникает во втором угловом диапазоне (например, от 360° до 90°), формула (1) становится:

Данную формулу можно разбить на две части:
 , (для Θ в диапазоне от 90° до 0°)
, (для Θ в диапазоне от 90° до 0°)
 , (для Θ в диапазоне от 360° до 90°)
, (для Θ в диапазоне от 360° до 90°)
Дополнительно предполагая, что инерция всех движущихся частей (например, маховика 2, редуктора 46, вала 3, кривошипа 6, плунжера 13 и т.д.) пресс-подборщика 70 сконцентрирована в гипотетическом маховике, вращающемся с той же самой скоростью, что и кривошип, можно написать:

K1 является константой для конкретного пресс-подборщика 70, и может определяться экспериментально,
ω(t) представляет собой угловую скорость кривошипа (и гипотетического маховика) и равна временной производной угла кривошипа, ω(t)=dΘ(t)/dt.
Математическая модель дополнительно основана на предположении, что энергию сжатия и энергию трения на протяжении каждого цикла можно апроксимировать по следующим формулам:
 , t0 представляет собой время в начале сжатия,
, t0 представляет собой время в начале сжатия,
 , t1 представляет собой время в конце сжатия,
, t1 представляет собой время в конце сжатия,
k21 и k22 представляет собой коэффициенты, связанные с количеством и сжимаемостью убираемого материала 18 в прессовальной камере 80, данные коэффициенты могут непрерывно варьировать, но только предполагается, что они варьируют медленно, так что для оценки энергии Ecompr сжатия для следующего вращения могут использоваться коэффициенты предшествующего вращения. После выполнения каждого сжатия, коэффициенты могут обновляться для следующего прогноза.
k31 и k32 представляет собой коэффициенты, связанные с трением пресс-подборщика 70. Предполагается, что данные коэффициенты имеют очень большую константу времени (например, недели, месяцы, годы), в зависимости от изнашивания пресс-подборщика 70.
После того, как данные коэффициенты становятся известны (например, определены экспериментально), за счет использования данных формул можно прогнозировать, сколько кинетической энергии будет теряться при следующем повороте кривошипа. Более конкретно, можно рассчитать, достаточно ли кинетической энергии остается для «выдерживания» следующего вращения.
Когда применяют торможение.
Когда к маховику 2 прикладывают тормозное усилие Fbrake(t) от времени t1 до t2, кинетическая энергия Ekin, преобразованная в тепло благодаря тормозному усилию, равна:
k4 является константой, связанной с системой торможения, и может определяться экспериментально.
Fbrake(t) представляет собой тормозное усилие, прикладываемое тормозному диску 41, которое может быть постоянным или может варьировать с течением времени.
Так как формулы являются довольно абстрактными, далее будут описаны два упрощенных примера для того, чтобы получить большее представление о способе торможения.
a) Плавное снижение скорости с использованием постоянного тормозного усилия F1 в течение короткого периода времени:
Если Fbrake(t) представляет собой постоянное усилие F1 и прикладывается в течение короткого периода времени от t1 до t2, скорость ω маховика 2 плавно уменьшается, без остановки. Принимая, что ω(t) может быть апроксимировано между t1 и t2 с помощью средней угловой скорости  , тогда формула (8) становится:
, тогда формула (8) становится:

Из формулы (9) видно, что в этом случае энергия Ebrake торможения пропорциональна тормозному усилию F1, и пропорциональна времени торможения Δt=t2-t1, и пропорциональна средней угловой скорости .
b) Остановка с использованием постоянного тормозного усилия F2:
Если Fbrake(t) представляет собой постоянное усилие F2, прикладываемое к дисковой тормозной системе 40 до тех пор, пока маховик 2 не остановится, и при условии, что энергия Efrict трения является незначительной относительно энергии Ebrake торможения, и при условии, что в процессе торможения сжатие не происходит (например, при активации тормоза только в угловом диапазоне от приблизительно 360° до приблизительно 90°), тогда ω(t) может составлять приблизительно:
 , ω0 представляет собой угловую скорость непосредственно перед торможением,
, ω0 представляет собой угловую скорость непосредственно перед торможением,
 , α представляет собой постоянное замедление,
, α представляет собой постоянное замедление,
Δt представляет собой необходимое время.
Заполняя данное выражение в формуле (8) и используя (10b), получаем:

 или
или

Поскольку в этом случае общая кинетическая энергия Ekin маховика 2 будет преобразована в тепло за счет торможения, Ebrake также равна кинетической энергии перед началом торможения, таким образом:

Данная формула показывает, что энергия торможения не зависит от Δt, и таким образом является одинаковой для сильного короткого торможения или для длинного мягкого торможения.
Приравнивая (11) к (12), получается:
 или:
или:

Из уравнения (14) видно, что для постоянного усилия F2, время Δt торможения пропорционально первоначальной угловой скорости ω0 непосредственно перед торможением. Таким образом, для того, чтобы удерживать время Δt торможения маленьким, полезно начинать торможение с маленького, например, как можно более низкого ω0.
Кроме того видно, что для заданной скорости ω0, время Δt торможения может быть уменьшено за счет выбора большего F2, поскольку из (14) следует, что:
 ,
,
причем Δt может быть сделана по необходимости маленькой за счет выбора достаточно большого тормозного усилия F2.
В течение данного периода времени Δt, кривошип 6 повернется на угол, равный целому числу, заданному формулой (10), т.е. угол торможения  , который объединен с формулой (15), дает:
, который объединен с формулой (15), дает:
 или
или

Из формулы (16) видно, что для любой первоначальной скорости ω0, усилие F2 может быть выбрано таким образом, чтобы угол торможения Ebrake мог быть маленьким по необходимости. Это доказывает, что возможно сделать остановку кривошипа 6 в любом необходимом положении, таким образом, также в диапазоне заданных стартовых положений. Например, в варианте осуществления изобретения, торможение начинают немедленно после сжатия, т.е. когда кривошип 6 находится в угловом положении 360°, соответствующем плунжеру 13, находящемуся в его дистальном положении 8, но изобретение им не ограничено, и для начала торможения также могут быть выбраны другие положения кривошипа, например, 350°, 340° и т.д., но также перед тем, как плунжер 13 достигает своего дистального положения, например, 10°, 20° и т.д.
ФИГ. 11 показывает пример, где F2 и ω0 выбраны таким образом, что Θbrake=90° (см. формулу 16), и при этом торможение начинается, когда кривошип 6 находится в угловом положении θ1=340°, так что кривошип 6 остановится в θ2=250°, который также является положением кривошипа для следующего запуска пресс-подборщика. Это только пример, и могут быть выбраны другие значения.
В описании выше, постоянное тормозное усилие F1 и F2 использовали для дополнительного преобразования формул таким образом, чтобы их можно было легко понять, но абсолютно нет необходимости, чтобы тормозное усилие Fbrake представляло собой постоянное усилие. Таким образом на практике, тормозное усилие Fbrake может варьировать с течением времени, например, пошаговым образом (за счет выбора между двумя или более постоянными усилиями), или кусочно линейным образом, или согласно более сложной функции (например, функции нелинейных изменений).
Также следует отметить, что, в описании выше, тормозное действие не совпадает с сжимающим действием, для упрощения формул, но это также абсолютно не требуется. Таким образом на практике, тормозное действие может происходить также в процессе сжатия. Теперь несколько вариантов осуществления будут описаны более подробно и проиллюстрированы на чертежах.
ПРИМЕР 1:
В первом примере, пресс-подборщик 70 содержит первый датчик 43а (см. Фиг. 9) для измерения угловой скорости ω в качестве функции времени: ω(t), например, тахометр или датчик скорости, и второй датчик 43b для измерения углового перемещения кривошипа в качестве функции времени: θ(t). Нет необходимости располагать первый и второй датчик 43а, 43b на самом кривошипе 6, но они также могут быть расположены, например, на маховике 2, или на валу 3, действующем синхронно с кривошипом 6. В данном случае, сигналы датчика, например, угловое положение Θ или угловая скорость ω вала 3 легко могут быть преобразованы в угловое положение и угловую скорость кривошипа 6 за счет применения коэффициента N умножения, представляющего собой соотношение скорости вращения вала 3 и скорости вращения кривошипа 6. Фиг. 12 и Фиг. 13 показывают график угловой скорости ω(t) и углового положения θ(t) кривошипа в зависимости от времени.
Датчики 43 в данном примере предоставляют непрерывный сигнал времени ω(t) и θ(t). Перед временем t0, пресс-подборщик 70 активно приводится в действие для изготовления тюков, а скорость вращения кривошипа является по существу постоянной и равна ω0, например, приблизительно 43 об/мин (соответствующих 1000 об/мин маховика 2), см. Фиг. 12(а).
В реальности угловая скорость кривошипа не является на самом деле постоянной, но периодически уменьшается, например, с 2,5 об/мин (соответствующими падению, равному приблизительно 60 об/мин для маховика 2) в процессе каждого сжатия убираемого материала 18 в прессовальной камере 80 (например, когда кривошип 6 находится между 90° и 0°), и снова увеличивается с помощью ВОМ трактора (например, когда кривошип находится между 360° и 90°), как указано в детали А Фиг. 12(а).
Когда пресс-подборщик 70 выключается во время t0 (ФИГ. 12), например, за счет отсоединения ВОМ трактора, движущиеся части пресс-подборщика 70 (например, маховик 2, редуктор 46, вал 3, кривошип 6, плунжер 13 и т.д.) начинают замедляться, но кривошип 6 все-таки выполнит несколько оборотов, а плунжер 13 все-таки выполнит несколько сжатий перед полной остановкой пресс-подборщика 70. В процессе каждого сжатия убираемого материала 18, видно падение угловой скорости Δω. Падение скорости Δω, как правило, увеличивается по мере того, как сама скорость ω уменьшается. Между данными падениями скорости благодаря сжатиям, угловая скорость также постепенно уменьшается, например, вследствие трения, как показана в детали В Фиг. 12(а), где падение благодаря сжатию является довольно крутым. Спустя некоторое время, угловая скорость кривошипа 6 уменьшится до ω1 во время t1, см. Фиг. 13.
ФИГ. 13 показывает увеличенный участок правой части Фиг. 12. Рассмотрим один полный оборот кривошипа между t1 и t3, посредством чего Θ проходит от 360° до 90°, а затем дальше до 0°, и при этом соответствующая скорость вследствие трения падает с ω1 до ω2, и с ω2 до ω3 вследствие сжатия. Энергия трения Efrict, теряющаяся между t1 и t2, может быть рассчитана из формул (4) и (5) как: Efrict,t1-t2=kl.(ω12-ω22), а энергия трения между t3 и t4 может быть рассчитана аналогичным образом как: Efrict,t3-t4=kl.(ω32-ω42). За счет вставки в формулу (6) данных рассчетных значений, затем можно рассчитывать коэффициенты k31 и k32, и можно обновлять каждый период (т.е. каждый поворот кривошипа). В качестве альтернативы данными коэффициентами могут быть заданные константы, которые могут извлекаться из энергонезависимой памяти, например, флэш, и не обновляться. В варианте осуществления, k32 может быть принят равным нулю.
Аналогичным образом энергия, необходимая для прессования убираемого материала 18 в период t2-t3, может быть рассчитана из формул (3) и (5) как: Ecompr,t2-t3=kl.(ω22-ω32), а энергия сжатия между t4 и t5 может быть рассчитана как: Ecompr,14-t5=kl.(ω42-ω52) и т.д. За счет подстановки в формулу (4) измеренных значений, коэффициенты k21 и k22 могут рассчитываться и необязательно обновляться каждый период. На практике данные коэффициенты не будут значительно варьировать для последовательных поворотов, (например, вследствие того, что в прессовальную камеру добавляется только маленькое количество сельскохозяйственной культуры), или другими словами, энергия сжатия предшествующего поворота является хорошей оценкой энергии сжатия, необходимой для следующего поворота, которая может использоваться для прогнозирования соответствующей потери угловой скорости для следующего периода (т.е. поворота кривошипа).
Далее, для того, чтобы остановиться кривошип 6 в диапазоне заданных стартовых положений, например, в диапазоне от 270° до 360°, контроллер 47 торможения выполняет алгоритм, который проверяет по меньшей мере один раз для каждого поворота, обладает ли все-таки пресс-подборщик 70 достаточной кинетической энергией, чтобы «выдержать» следующий поворот. Критический момент наступает, когда кинетическая энергия Ekin пресс-подборщика 70 становится равна или ниже, чем сумма энергии трения Efrict и энергии сжатия Ecompr, необходимой для следующего поворота. Если пресс-подборщик 70 не остановился умышленно, тогда пресс-подборщик 70 заглохнет в процессе следующего поворота, называемого в данном описании «критический поворот». Алгоритм избегает данной ситуации за счет торможения пока кинетической энергии еще достаточно, и пока он еще возможно остановиться в заданном стартовом положении. Например, контроллер 47 торможения может контролировать скорость пока пресс-подборщик 70 действует свободно до одного но последнего поворота, предшествующего «критическому повороту», а затем применяет торможение, например, когда кривошип 6 находится за пределами положения 360°. Однако, если тормозное усилие может точно регулироваться (по амплитуде и/или по времени), возможно начать торможение под другими углами кривошипа с использованием соответствующего тормозного усилия.
В примере, тормозное усилие является константой и равно F2, и запускается только когда кривошип 6 достигает заданного углового положения, например, 270°, обозначенного черным кружком на Фиг. 13(b). Во время торможения, кривошип будет плавно поворачиваться дальше в течение периода Δt времени, в зависимости от скорости непосредственно перед торможением, (в этом случае плавно менее чем ω5) и в зависимости от усилия F2. В данном примере усилие F2 выбрано достаточно большим, чтобы пресс-подборщик 70 останавливался в угловом положении, равном приблизительно 200°, как обозначено черным квадратом на Фиг. 13(b).
Следует отметить, что включение тормоза, когда кривошип находится при 270° является всего лишь примером, (выбранным для иллюстративных целей для того, чтобы t6 не совпадало с t5), но также для начала торможения можно использовать другие углы, например, 280°, 290°, 300°, 310°, 320°, 330°, 340° или даже выше, принимая в расчет угол Θbrake, требующийся в процессе торможения перед полной остановкой. В примере Фиг. 11, где F2 и ω0 таковы, что Θbrake=90°, это должно означать, что при запуске торможения с углом кривошипа 340°, кривошип должен останавливаться при 340°-90°=250°.
В качестве альтернативы, может быть даже лучше начинать торможение раньше чем 340°, например, с углом, равным 30°, таким образом, частично одновременно со сжатием. При условии того же самого Θbrake=90°, это должно означать, что кривошип будет останавливаться при 30°-90°+360°=300°.
В качестве еще одной альтернативы, контроллер 47 торможения также может решить остановить пресс-подборщик 70 на втором повороте, предшествующем «критическому повороту». В данном случае больше тепла будет рассеиваться системой торможения (см. формулу 12), и пока тормозное усилие не увеличиться, будет требоваться больший угол торможения Θbrake. На Фиг. 13(b) проиллюстрирован пример, где Θbrake=120°, и где торможение начинается в положении кривошипа 360° (обозначенном черным треугольником), и где кривошип 6 останавливался при 360°-120°=240° (обозначено черным ромбом). Соответствующее падение угловой скорости показано на Фиг. 13(а) пунктирной линией.
Следует отметить, что тормозное усилие Fbrake в примере Фиг. 13(с) равно нулю (т.е. торможение не применяется) до момента времени t6, но это не является абсолютным требованием. Вместо того, чтобы позволять пресс-подборщику 70 свободно работать от его первоначальной скорости во время t0 до тех пор, пока кинетическая энергия пресс-подборщика 70 не достигнет (почти) его критического значения, равного (Efrict+Ecompr), как объяснялось выше, обеспечивается возможность более раннего прикладывания тормозного усилия F1 (или F2), например, перед моментом времени t1, как обозначено на Фиг. 12(с) пунктирной линией. Однако, данное необязательное дополнительное тормозное действие не должно замедлять пресс-подборщик 70 слишком сильно, т.е. кинетическая энергия должна оставаться выше критического значения, чтобы избежать данной ситуации, специалист в данной области техники может выбрать подходящее тормозное усилие F1 и/или подходящий период торможения, например, за счет применения постоянного усилия F1, отслеживая в то же время угловую скорость, и отпуская тормозное усилие, когда угловая скорость достигает определенного значения значительно выше критического значения ωthr (пороговая скорость) для выдерживания последнего вращения.
ПРИМЕР 2:
В варианте примера 1, вместо расчета Efrict и Ecompr предшествующего поворота, и прогнозирования Efrict и Ecompr для следующего поворота, и проверки, достаточно ли еще большая кинетическая энергия для выдерживания следующего поворота, алгоритм вместо этого может сравнивать кинетическую энергию с заданной пороговой энергией Ethr. Значение данной пороговой энергии может определяться в процессе тестирования или калибровки конкретного пресс-подборщика 70, например, в условиях сельскохозяйственной культуры в самом неблагоприятном варианте, необязательно принимая в расчет коэффициент надежности. Следует отметить, что согласно формуле (5), проверка, равна ли кинетическая энергия Ekin или меньше, чем заданное пороговое значение Ethr, эквивалентна проверке, равна ли угловая скорость ω или меньше, чем заданное пороговое значение ωthr. Следует отметить, что данное значение Ethr также может быть рассчитано из формулы (6) и (7), принимая в расчет реалистичные значения для k21, k22, k31, k32 и ω, при которых начинается торможение. Алгоритм примера 2 позволит пресс-подборщику 70 постепенно замедляться до тех пор, пока угловая скорость ω(t) не достигнет пороговой скорости ωthr, а затем будет ожидать до тех пор, пока кривошип не будет находится в заданном угловом положении для начала торможения, например, 270° для черного кружка Фиг. 13(b), а затем будет прикладывать торможение с заданным усилием. Что касается примера 1, также могут использоваться первоначальные углы, например, 300°, 330°, 360°, 30°, 60°, принимая в расчет значение для Θbrake. Положением запуска в примере 1 и 2 может быть фиксированное заданное значение, или оно может определяться алгоритмом, например, за счет использования справочной таблицы, где в зависимости от угловой скорости может быть выбран другой начальный угол. Во время фазы конструирования или калибровки значения для справочной таблицы могут храниться в памяти.
ПРИМЕР 3:
В третьем примере, проиллюстрированном на Фиг. 14, пресс-подборщик 70 содержит бесконтактный датчик 43, расположенный в углу кривошипа 270°, который подает сигнал, когда кривошип проходит угловое положение 270°. Контроллер 47 торможения содержит процессор, соединенный с блоком синхронизации и с памятью. Когда кривошип 6 проходит датчик 43 первый раз, датчик 43 подает сигнал, и процессор получает от блока синхронизации первое временное значение t1 и сохраняет значение в памяти. Когда кривошип проходит датчик 4 3 следующий раз, он получает от блока синхронизации второе временное значение t2 и также сохраняет в памяти, затем разницу во времени рассчитывают, как:
Δt=t2-t1
а (среднюю) угловую скорость рассчитывают как:
=2*pi/Δt, где pi составляет приблизительно 3,1416
ФИГ. 14 дает графическое представление этих данных и функционирования данного алгоритма. Фиг. 14(а) показывает пошаговое приближение угловой скорости ω(t) кривошипа с течением времени, которое получается с помощью данного алгоритма. Перед временем t1, пресс-подборщик активно движется, а кривошип 6 вращается со своей номинальной скоростью ω0. Во время t0, пресс-подборщик 70 выключается, например, за счет отключения ВОМ 15 трактора. Угловая скорость кривошипа 6 (и маховик, и вала и т.д.) будет постепенно замедляться. При условии, что угловая скорость, рассчитанная таким образом, больше, чем заданное пороговое значение ωthr, что на Фиг. 14 соответствует t1, t2, t3, t4, t5, тормозное усилие не применяется. Однако, когда угловая скорость , рассчитанная таким образом, равна или меньше, чем заданное пороговое значение ωthr, что на Фиг. 14 происходит при t6, тогда к системе 40 торможения прикладывают заданное тормозное усилие F2. В данном примере, в котором бесконтактный датчик находится в положении кривошипа 270°, тормозное усилие F2 прикладывают как можно быстрее после t6. На Фиг. 14(b) начало тормозного действия обозначено черным кружком. Тормозное усилие будет замедлять движущиеся части пресс-подборщика 70, (и/или маховика 2, вала 3, редуктора 46, кривошипа 6 и т.д.), которые в примере Фиг. 14(b) полностью останавливаются при угловом положении кривошипа, равном 180°, обозначенном черным квадратом, хотя датчик 43 не будет в состоянии проверить данное положение (так как он является бесконтактным датчиком, который может выявлять, только когда кривошип находится около положения, равного 270° в данном примере), но это гарантируется конструкцией (за счет применения тормозного усилия F2, немедленно после попадания кривошипа в положение 270°, и выяснения, что угловая скорость кривошипа ниже ωthr, вращение гарантировано остановится). Понятно, что чем больше тормозное усилие F2, и меньше инерция движущихся частей пресс-подборщика 70, тем скорее пресс-подборщик 70 полностью остановится. специалист в данной области техники может определить подобное тормозное усилие F2 в зависимости от характеристик пресс-подборщика 70, например, конструкции, с помощью обычного тестирования, с помощью расчета (см. Математический раздел выше), или просто путем проб и ошибок.
Пороговое значение ωthr для угловой скорости кривошипа предпочтительно является как можно более низким, например, приблизительно 4,3 об/мин (соответствуя приблизительно 100 об/мин для маховика 2), для сохранения как можно меньше энергии торможения Ebrake и угла торможения Θbrake, но должно быть достаточно большим для предотвращения, что пресс-подборщик 70 заглохнет в процессе сжатия убираемого материала 18. Другими словами, пороговое значение ωthr должно определяться таким образом, чтобы пресс-подборщик 70 все-таки имел достаточную кинетическую энергию, чтобы «выдержать» следующий полный оборот, включая трение и сжатие, как описано для примера 1 и 2. Данное значение может определяться экспериментально. Также можно принять в расчет коэффициент надежности (например, 20% или 30% или более).
Следует отметить, что проверка, равна ли угловая скорость или меньше, чем заданное пороговое значение ωthr, эквивалентна проверке, равна ли временная разница Δt между последовательными сигналами от датчика 43 или больше, чем заданное пороговое значение Δtthr. Используя данный критерий, контроллеру 47 торможения не будет необходимо рассчитывать среднюю угловую скорость, но просто он должен выявить, когда временная разница между двумя последовательными импульсами от датчика 43 становится больше, чем Δtthr. Это может упростить реализацию.
В вариантах третьего примера, датчик 43 может быть расположен в другом положении кривошипа, например, между 270° и 360°, например, при 280° или 290° или 300° или 310° или 320° или 330° или 340° или 350°. В любом из данных положений, тормозное усилие F2 может включаться как можно быстрее после t6 (т.е. момента, когда кривошип проходит датчик при условии, что выполняется условие падения скорости ниже заданного порогового значения), поскольку угол кривошипа соответствует положению плунжера после его дистального положения 8 в прессовальной камере.
В качестве альтернативы, датчик 43 также может быть расположен с углом, например, 10° или 20° или 30° или возможно еще больше, при условии, что приняты меры для предотвращения, что плунжер 13 останавливается перед достижением его дистального положения 8. Это может достигаться за счет применения достаточно маленького усилия F2 (по меньшей мере первоначально), или за счет использования временной задержки между временем t6 и прикладыванием тормозного усилия. Временной задержкой может быть заданная постоянная задержка, или временная задержка, соответствующая угловой скорости, например, полученной посредством справочной таблицы, значения которой определяют во время фазы калибровки. Время, необходимое для выполнения расчетов выше, необязательно можно вычитать из временной задержки.
В еще одном варианте, датчик может быть расположен, например, в положении Θbrake 330°, при этом Θbrake рассчитывается с помощью формулы 16, с использованием ωthr, а 330° выбирают для добавления коэффициента надежности 30°. В этом случае, временная задержка не требуется, и тормоз может быть активирован как можно быстрее после возникновения сигнала датчика, при условии соответствия условию, что Δt>Δtthr.
Следует отметить, что тормозное усилие Fbrake на Фиг. 14(с) принималось равным нулю до момента времени t6, но это не является абсолютным требованием. Вместо того, чтобы позволить пресс-подборщику 70 свободно работать от его первоначальной скорости ω0 до тех пор, пока он (почти) достигнет порогового значения ωthr, обеспечивается возможность прикладывания тормозного усилия F1 (или F2) перед моментом времени t6, как обозначено на Фиг. 14(с) пунктирной линией. Однако, также как в других примерах, данное необязательное дополнительное тормозное действие не должно замедлять пресс-подборщик 70 слишком сильно, т.е. настолько сильно, чтобы он останавливался в процессе сжатия. Снова, этого состояния можно легко избежать за счет применения первого тормозного усилия F1 до тех пор, пока угловая скорость ω не уменьшится ниже заданного второго порогового значения ωthr2 (не показано), большего чем ωthr. специалист в данной области техники может легко выбрать подходящее тормозное усилие F1, и/или подходящее время торможения, и подходящее второе пороговое значение ωthr2.
ПРИМЕР 4:
Данный пример проиллюстрирован на Фиг. 15 и 16, и его функционирование вполне похоже на примеры 1 и 2, за исключением того, что пресс-подборщик 70 будет иметь только датчик 43а скорости, а не датчик 43b положения. Как и раньше, если датчик установлен на кривошипе 6, он будет непосредственно предоставлять (непрерывное время) кривую ω(t), если датчик установлен например, на маховике 2, кривая может было получена за счет применения коэффициента умножения N. На первой стадии, алгоритм будет ожидать (и/или необязательно прикладывать первое тормозное усилие F1), до тех пор, пока кинетическая энергия Ekin не достигнет порогового значения Ethr (как в примере 1), которое либо является заданной константой, либо рассчитывается в каждом периоде на основании разницы угловой скорости, или до тех пор, пока угловая скорость не достигнет порогового значения ωthr (как в примере 2).
Во второй стадии, алгоритм определяет подходящее время для начала тормозного действия за счет применения усилия Fbrake. Но в результате отсутствия датчика положения, для определения подходящего момента используется другой механизм. Принципом, используемым в данном примере, является выявление зон zA, zC и т.д. сжатия и зон zB и т.д. торможения за счет наблюдения за угловой скоростью. На самом деле, данные зоны легко могут быть выявлены, потому что уклон угловой скорости ω(t) в зонах сжатия значительно выше, чем уклон угловой скорости в зонах трения. Он может быть получен, например, за счет вычисления временной производной угловой скорости. Поскольку сжатие всегда происходит по существу в одном и том же угловом положении кривошипа (см. Фиг. 10), угловое положение кривошипа может быть получено из кривой угловой скорости. Таким образом, во второй стадии алгоритм будет ожидать до прохождения зон сжатия (т.е. после t5 на Фиг. 16, как обозначено черным кружком), а затем активировать тормозное усилие, до полной остановки пресс-подборщика (черный квадрат на Фиг. 16).
В варианте данного примера (не показано на Фиг. 16), алгоритм может определять время (t2-t3) и (t4-t5) и т.д. Для каждой зоны сжатия и может начинать плавное торможение перед полным прохождением последней зоны сжатия (т.е. плавно перед t5). Это соответствует запуску в положении кривошипа, равном, например, 30° или 60°, как описано выше.
Следует отметить, что алгоритм примера 4 также может использоваться в пресс-подборщике 70, имеющем датчик скорости и датчик положения, как в примере 1 и 2, если это необходимо, например, в случае неисправности датчика положения.
Следует отметить, что в редком случае, когда прессовальная камера 80 будет пустой, что возможно будет происходить, только когда пресс-подборщик 70 используют в самый первый раз, в начале нового уборочного сезона, после починки и т.д., алгоритм примера 4 будет неспособен выявлять зону zA, zC сжатия, так как в прессовальной камере 80 не будет убираемого материала. В подобном случае алгоритм может благополучно решить остановить кривошип 6 в любом угловом положении, поскольку для пустого пресс-подборщика 70 не будет проблемы запуска.
ПРИМЕР 5:
В пятом примере, пресс-подборщик 70 имеет датчик относительного положения, а не датчик скорости. В подобном случае кривая скорости ω(t) может быть легко получена из сигнала углового положения, за счет определения временной производной относительного положения. Может использоваться тот же самый алгоритм, как в примере 4.
ПРИМЕР 6:
В шестом примере, пресс-подборщик 70 имеет датчик абсолютного положения, а не датчик скорости. В подобном случае кривая скорости ω(t) может быть получена из сигнала углового положения, за счет определения его временной производной, обеспечивающей те же самые кривые ω(t) и θ(t), как в примере 1, таким образом может использоваться тот же самый алгоритм, как в примере 1. В качестве альтернативы, также может использоваться тот же самый алгоритм, который описан в примере 4.
В примерах выше, предполагается, что угол торможения Θbrake согласно формуле 16 меньше, чем один полный оборот, в данном случае на тормозное усилие не накладывается верхний предел, только нижний предел. Но это не является абсолютным требованием, и итоговое тормозное действие, для приведения маховика к остановке также может длиться дольше, чем один полный оборот. В этом случае, для того, чтобы гарантировать, что кривошип 6 остановиться в диапазоне заданных стартовых положений, необходимо, чтобы тормозное усилие Fbrake находилось между нижним и верхним пределом, или можно не прикладывать тормозное усилие непрерывно, но с перерывами или и так и так.
Описанные выше варианты осуществления способа представленного изобретения могут быть реализованы в системе 1 обработки, такой как показана на Фиг. 17. Фиг. 17 показывает одну конфигурацию системы 1 обработки, которая включает в себя по меньшей мере один программируемый процессор 10, соединенный с запоминающей подсистемой 5, которая включает в себя по меньшей мере одну форму памяти, например, ОЗУ, ПЗУ и так далее. Следует отметить, что процессор 10 или процессоры могут представлять собой процессор общего присвоения или специального присвоения, и могут предназначаться для включения в устройство, например, микросхему, которая имеет другие составные элементы, которые выполняют другие функции. Таким образом, один или более аспектов представленного изобретения могут быть реализованы в цифровой электронной схеме, или в компьютерном аппаратном обеспечении, встроенных программах, программном обеспечении или в их комбинациях. Система 1 обработки может содержать подсистему 12 хранения, которая имеет по меньшей мере один порт ввода (например, дисковод и/или устройство чтения компакт-дисков и/или DVD-дисковод). В некоторых вариантах осуществления, дисплейная система, клавиатура и указывающее устройство может содержаться в виде части подсистемы 9 пользовательского интерфейса, чтобы позволить пользователю вводить информацию вручную. Также могут содержаться порты для вывода данных. Дополнительные элементы, такие как сетевые соединения, интерфейсы для различных устройств и так далее, могут содержаться, но не проиллюстрированы на Фиг. 17. Различные элементы системы 1 обработки могут быть соединены различными путями, в том числе посредством шинной подсистемы 11, показанной на Фиг. 17 для простоты в виде единственной шины, но специалистам в данной области техники будет понятно что возможна система из по меньшей мере одной шины. Память запоминающей подсистемы 5 может в некоторое время содержать часть или весь (в каждом случае, показанном как 4) набор команд, который при выполнении в системе 1 обработки осуществляет стадии вариантов осуществления способа, описанных в данной заявке. Таким образом, несмотря на то, что система 1 обработки, такая как показана на Фиг. 17 относится к предшествующему уровню техники, система, которая включает в себя команды для осуществления аспектов способов для остановки кривошипа 6 сельскохозяйственного пресс-подборщика 70 в заданном диапазоне положений, не относится к предшествующему уровню техники, и вследствие этого Фиг. 17 не маркируется, как предшествующий уровень техники.
Представленное изобретение также включает в себя компьютерную программу или компьютерный программный продукт, который обеспечивает функционирование любого из способов согласно представленному изобретению при выполнении на вычислительном устройстве. Подобный компьютерный программный продукт может быть материально реализован в канале передачи, несущем машиночитаемый код для выполнения программируемым процессором. Представленное изобретение, таким образом, также относится к каналу передачи, несущему компьютерный программный продукт, который, при выполнении на вычислительном средстве, предоставляет команды для выполнения любого из способов, которые описаны выше. Термин «канал передачи» относится к любой среде, которая участвует в предоставлении процессору команд для выполнения. Подобная среда может принимать множество форм, включая но не ограничиваясь, энергонезависимые носители и передающие носители. Энергонезависимые носители включают, например, оптические или магнитные диски, такие как устройство хранения, которое является частью запоминающего устройства сверхбольшой емкости. Обычные формы машиночитаемого носителя включают, CD-ROM, DVD, гибкий диск или дискету, флеш-драйв, ленту, микросхему или плату памяти или любую другую среду, с которой компьютер может считывать. Различные формы машиночитаемого носителя могут быть вовлечены в перенос одной или более последовательностей одной или более команд в процессор для выполнения. Компьютерная программа или компьютерный программный продукт может переноситься на электрическом несущем сигнале. Компьютерный программный продукт также может передаваться посредством несущей волны в сети, такой как LAN, WAN или интернет. Передающая среда может принимать форму звуковых или световых волн, таких как волны, генерируемые в процессе передач радиоволновых и инфракрасных данных. Передающая среда содержат коаксиальные кабели, медный провод и оптические волокна, включая провода, которые содержат шину внутри компьютера.
ССЫЛОЧНЫЕ ПОЗИЦИИ
1 Система обработки
2 маховик
3 вал
4 память
5 запоминающая подсистема
6 кривошип
7 ближнее положение
8 дистальное положение
9 подсистема пользовательского интерфейса
10 процессор
11 шинная подсистема
12 подсистема хранения
13 плунжер
14 контроллер трактора
15 ВОМ трактора
17 трактор
18 убираемый материал
24 уплотняющий механизм
25 рама
26 проходящее вперед дышло
27 подбирающий узел
28 подающий трубопровод
29 набивочный механизм
31 выгрузное устройство
40 система торможения
41 Тормозной диск
42 дисковый коготь
43 датчик
44 устройство ввода (пресс-подборщика)
45 устройство ввода (трактора)
46 редуктор
47 контроллер торможения
49 гидравлическая система
51 тормозной суппорт
53 управляющий клапан
54 трубка
58 тормозные колодки
70 пресс-подборщик
80 прессовальная камера
θ угловое положение или угловое расстояние
Ekin кинетическая энергия
ω угловая скорость
α угловое ускорение
F направление нормальное/вперед
R направление назад/обратное
zA зоны сжатия
zB зона В трения
ЕА падение энергии в зоне А
R вид сзади
S вид сбоку
F вид спереди.
| название | год | авторы | номер документа |
|---|---|---|---|
| ПРЕСС-ПОДБОРЩИК С СИСТЕМОЙ УПРАВЛЕНИЯ ЗАПУСКОМ | 2014 |
|
RU2606528C1 |
| ПРЕСС-ПОДБОРЩИК И СПОСОБ УСОВЕРШЕНСТВОВАННОГО МАНИПУЛИРОВАНИЯ ТЮКОМ | 2015 |
|
RU2697048C2 |
| СИСТЕМА РЕГУЛИРОВАНИЯ ПЛОТНОСТИ | 2013 |
|
RU2606530C1 |
| ТЮКОВОЙ ПРЕСС-ПОДБОРЩИК И СПОСОБ ИЗГОТОВЛЕНИЯ ПРЕССОВАННЫХ ТЮКОВ | 2012 |
|
RU2611818C2 |
| СЕЛЬСКОХОЗЯЙСТВЕННЫЙ ПОРШНЕВОЙ ПРЕСС | 2011 |
|
RU2488988C2 |
| СЕНСОРНЫЙ УЗЕЛ ПОЛОЖЕНИЯ ПЛУНЖЕРА ПРЕСС-ПОДБОРЩИКА И СПОСОБ | 2015 |
|
RU2666740C2 |
| УЗЕЛ И СПОСОБ ИЗМЕРЕНИЯ МАССОВОГО РАСХОДА ПРЕСС-ПОДБОРЩИКА | 2015 |
|
RU2708976C2 |
| ТЮКОВЫЙ ПРЕСС-ПОДБОРЩИК И СПОСОБ ИЗГОТОВЛЕНИЯ ПРЕССОВАННЫХ ТЮКОВ | 2012 |
|
RU2611817C2 |
| Пресс-подборщик | 2015 |
|
RU2710138C2 |
| СПОСОБ УПРАВЛЕНИЯ ВЕТРОЭНЕРГЕТИЧЕСКОЙ УСТАНОВКОЙ | 1995 |
|
RU2075640C1 |
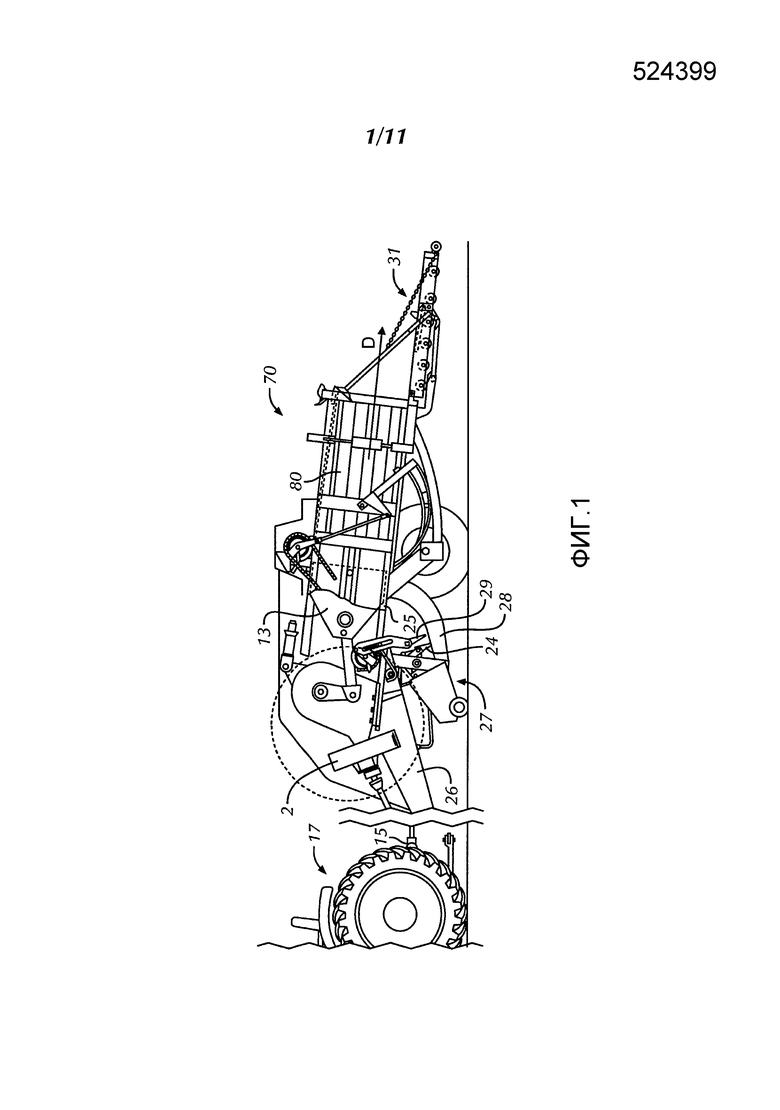
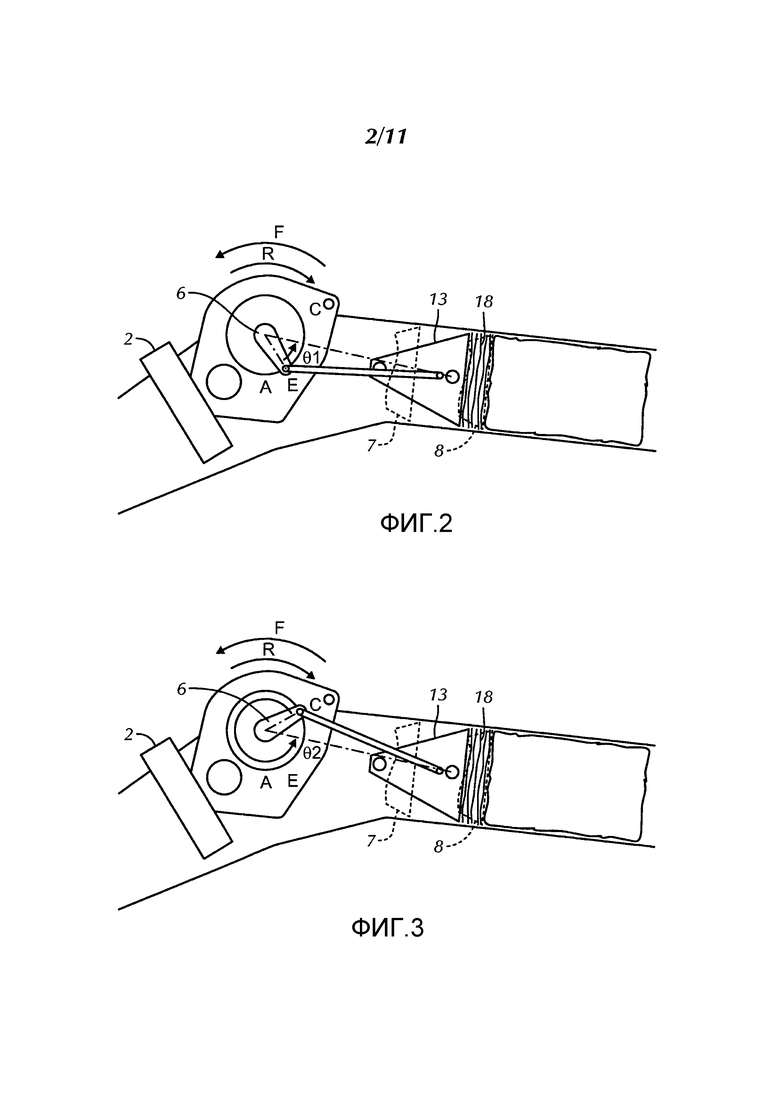

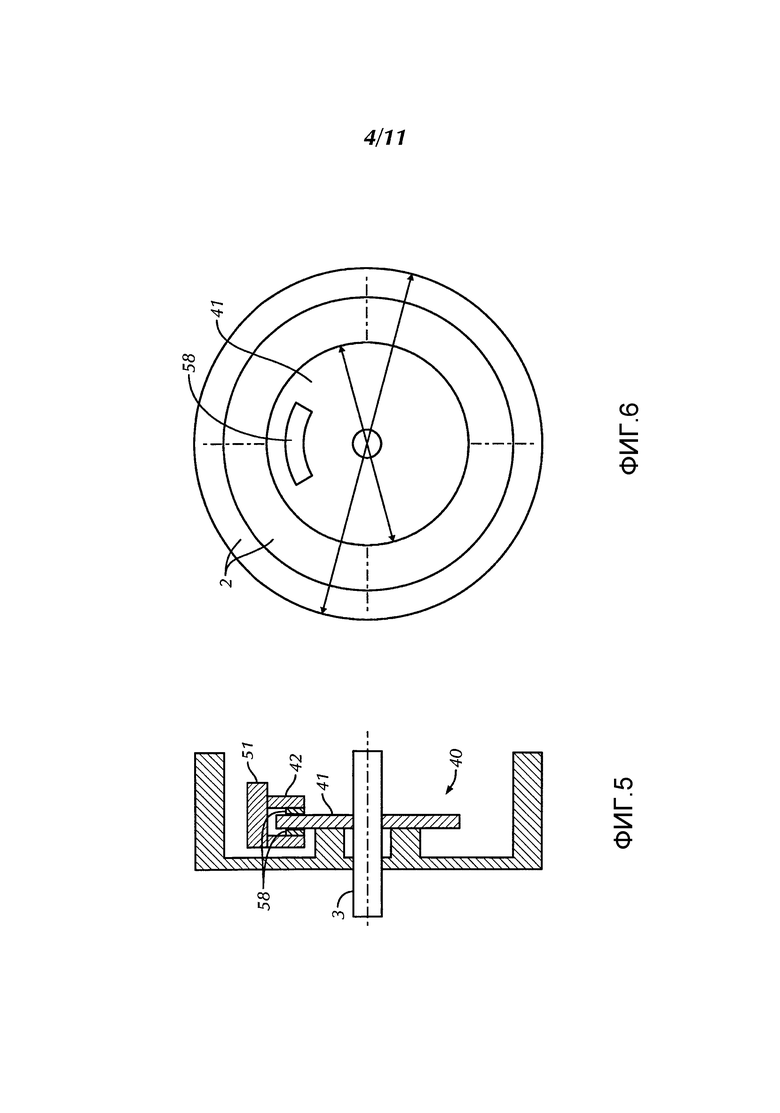


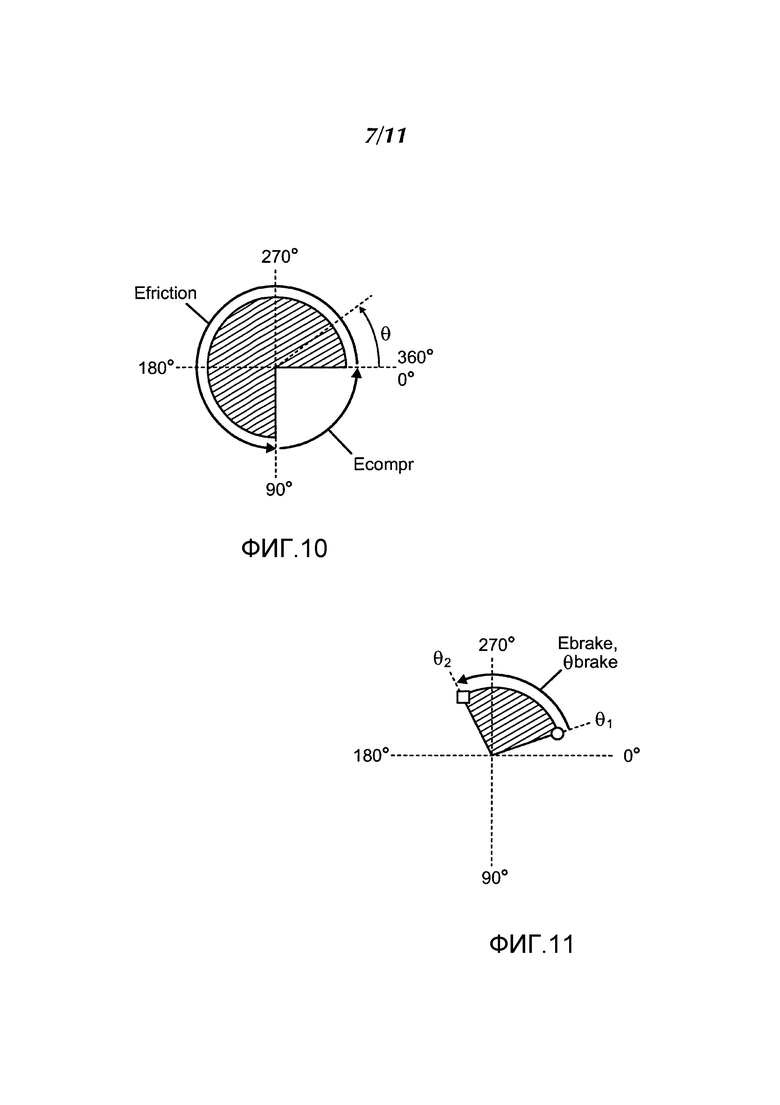
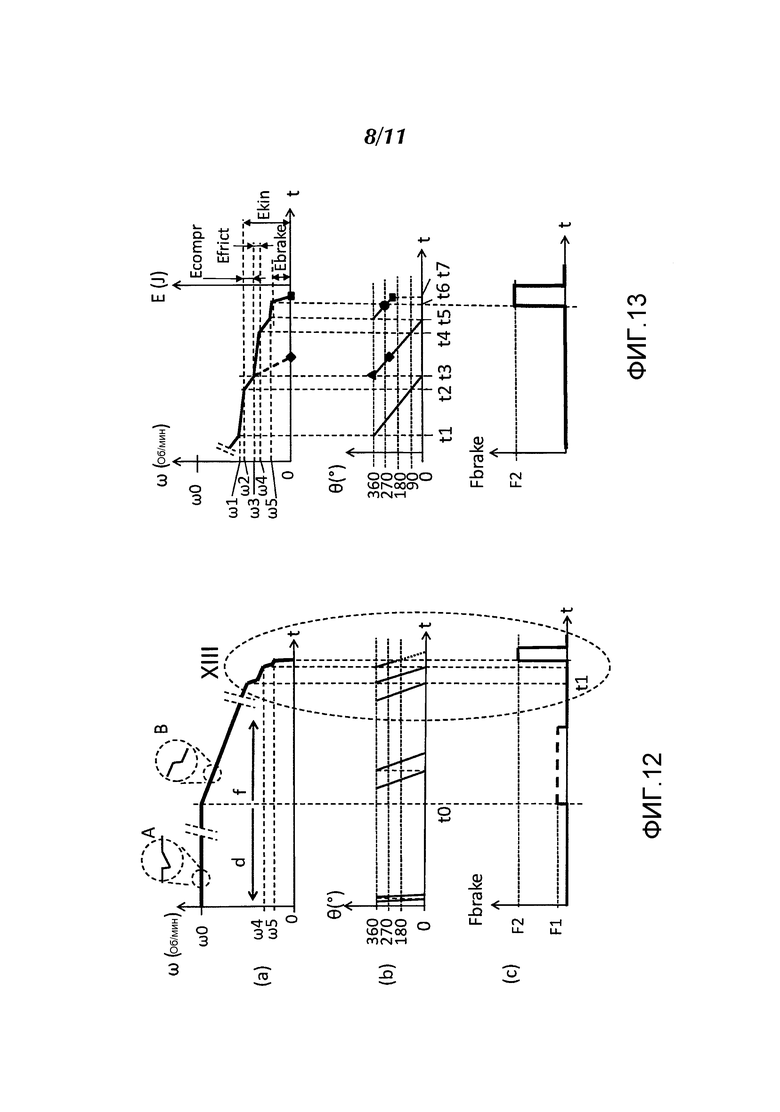
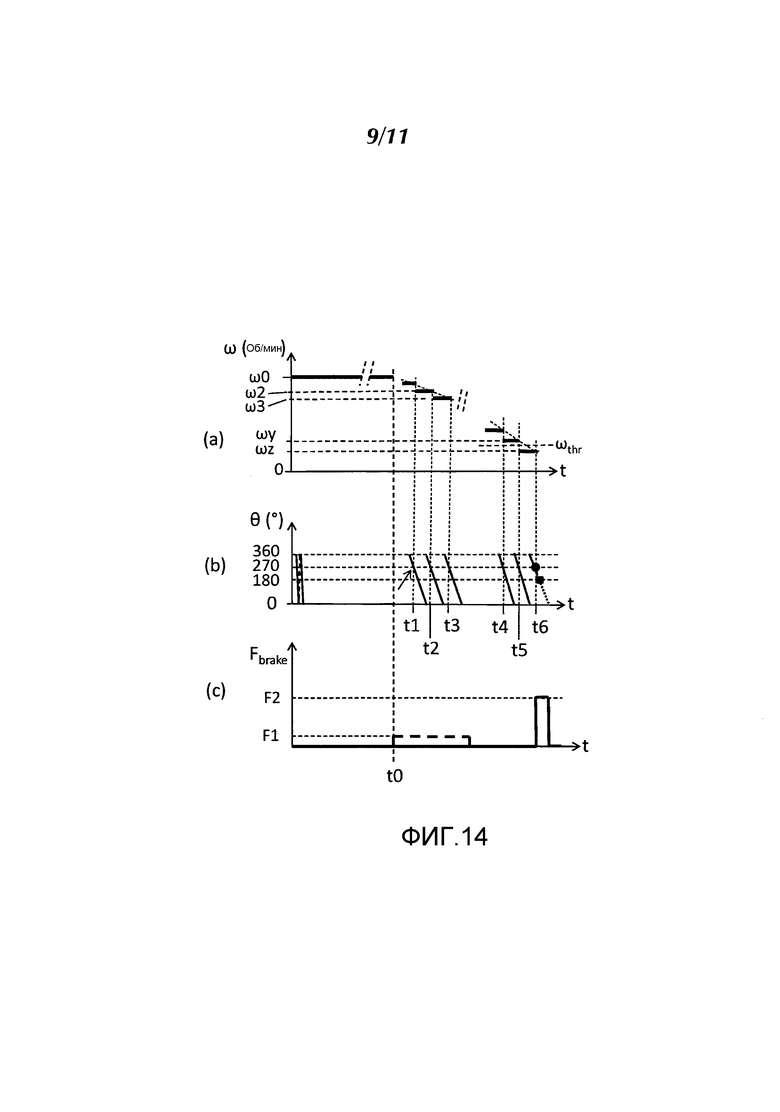
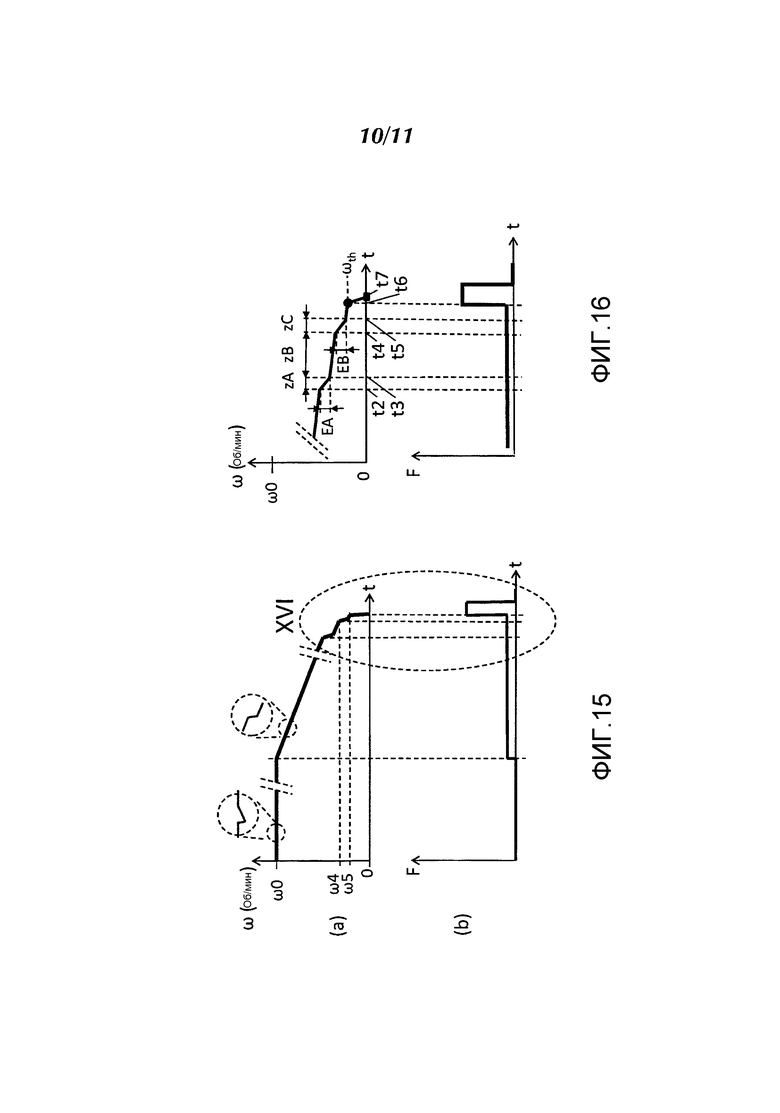
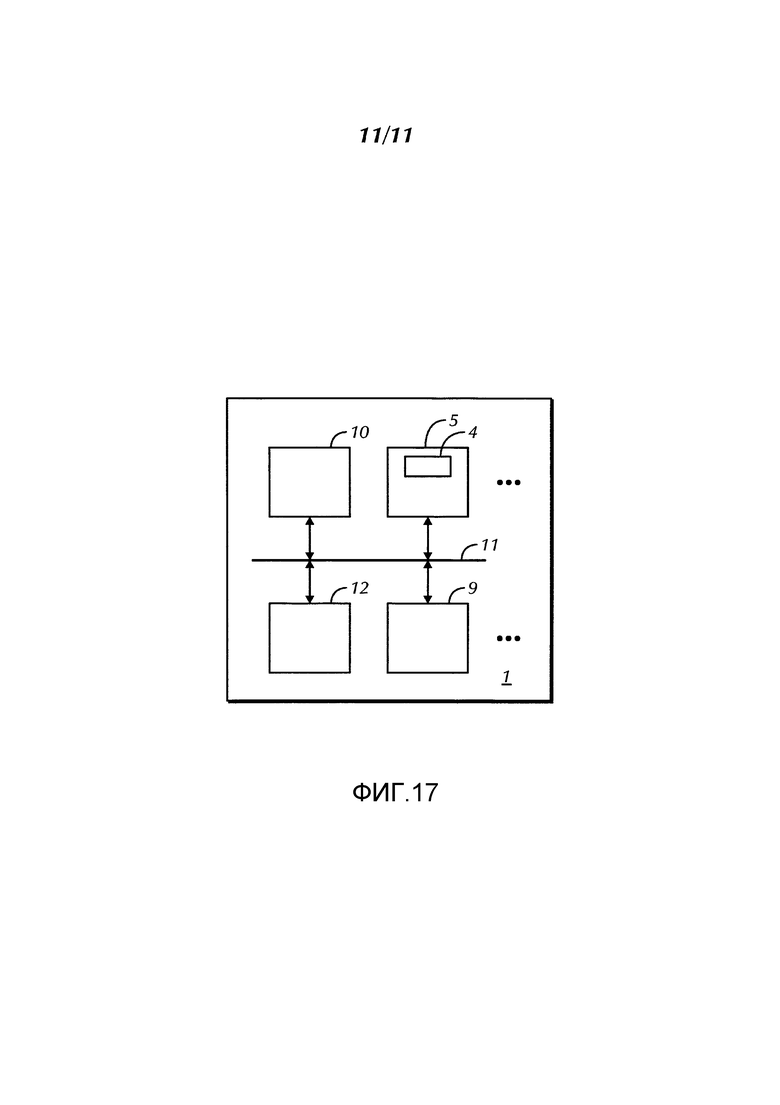
Группа изобретений относится к сельскохозяйственному машиностроению. Сельскохозяйственный пресс-подборщик содержит соединенный с валом маховик, плунжер, тормозную систему, по меньшей мере один датчик и систему управления тормозами. Плунжер соединен посредством кривошипа с маховиком. Тормозная система выполнена с возможностью обеспечения тормозного усилия для замедления маховика. Датчик выдает данные, указывающие по меньшей мере одну движущую часть пресс-подборщика. Система управления тормозами соединена по меньшей мере с одним датчиком и тормозной системой для выдачи сигнала управления тормозами. Система управления тормозами содержит систему обработки, имеющую алгоритм определения сигнала управления тормозами для остановки кривошипа в диапазоне заданных стартовых положений. Использование группы изобретений обеспечивает надежный запуск пресс-подборщика в рабочем режиме. 3 н. и 12 з.п. ф-лы, 17 ил.
1. Сельскохозяйственный пресс-подборщик (70), содержащий:
вал (3) для соединения с валом отбора мощности (15) и маховик (2), соединенный с валом (3);
плунжер (13), соединенный с маховиком (2) посредством кривошипа (6), при этом плунжер (13) выполнен с возможностью совершения возвратно-поступательного перемещения между ближним положением (7), допускающим добавление убираемого материала в прессовальную камеру (80), и дистальным положением (8), подходящим для прессования убираемого материала в прессовальной камере (80);
тормозную систему (40), выполненную с возможностью обеспечения тормозного усилия (F2) для замедления маховика (2) в зависимости от сигнала (сигналов) управления тормозами;
по меньшей мере один датчик (43) для выдачи данных датчика, указывающих по меньшей мере одну движущуюся часть пресс-подборщика;
систему (47) управления тормозами, соединенную с по меньшей мере одним датчиком (43) для получения данных датчика и соединенную с тормозной системой (40) для выдачи сигнала (сигналов) управления тормозами, при этом система управления тормозами содержит систему обработки, снабженную алгоритмом определения сигнала (сигналов) управления тормозами для остановки кривошипа (6) в диапазоне заданных стартовых положений.
2. Сельскохозяйственный пресс-подборщик (70) по п. 1, в котором заданным диапазоном стартовых положений является диапазон угловых положений (Θ) кривошипа (6), расположенного с угловым расстоянием, равным по меньшей мере 90° в направлении (F) вперед от положения кривошипа, в котором плунжер (13) достигает своего дистального положения (8), предпочтительно по меньшей мере 120°, более предпочтительно по меньшей мере 150°, наиболее предпочтительно по меньшей мере 180°.
3. Сельскохозяйственный пресс-подборщик (70) по п. 1 или 2,
в котором предусмотрен алгоритм для определения начального времени (t6) для прикладывания тормозного усилия (F2) на основании данных датчика.
4. Сельскохозяйственный пресс-подборщик (70) по п. 3, в котором данные датчика указывают скорость (ω) кривошипа и положение (Θ) кривошипа, при этом алгоритм выполнен с возможностью определения, в качестве начального времени (t6), времени, когда угловая скорость уменьшилась ниже пороговой скорости (ωthr), а положение кривошипа достигает порогового угла (Θthr).
5. Сельскохозяйственный пресс-подборщик (70) по п. 4,
в котором по меньшей мере один датчик представляет собой бесконтактный датчик, расположенный под пороговым углом (Θthr),
при этом система обработки соединена с блоком синхронизации;
и причем алгоритм выполнен с возможностью преобразования данных датчика в угловую скорость (ω).
6. Сельскохозяйственный пресс-подборщик (70) по п. 4 или 5,
в котором по меньшей мере один датчик представляет собой датчик абсолютного положения, выполненный с возможностью выдачи данных, указывающих угловое положение (Θ) кривошипа,
и при этом алгоритм выполнен с возможностью преобразования данных датчика в угловую скорость (ω).
7. Сельскохозяйственный пресс-подборщик (70) по п. 4,
в котором по меньшей мере один датчик представляет собой датчик относительного положения, выполненный с возможностью выдачи данных, указывающих относительное угловое положение (Θ) кривошипа,
и при этом алгоритм выполнен с возможностью преобразования данных датчика в угловую скорость (ω),
и причем алгоритм выполнен с возможностью определения зоны (zC) сжатия, и с возможностью присвоения времени, соответствующего окончанию зоны (zC) сжатия, начального времени (t6).
8. Сельскохозяйственный пресс-подборщик (70) по п. 4,
в котором по меньшей мере один датчик представляет собой датчик скорости, выполненный с возможностью выдачи данных, указывающих (ω) угловую скорость кривошипа,
и при этом алгоритм выполнен с возможностью определения зоны (zC) сжатия, и с возможностью присвоения времени, соответствующего окончанию зоны (zC) сжатия, начального времени (t6).
9. Способ остановки кривошипа (6) сельскохозяйственного пресс-подборщика (70) в диапазоне заданных стартовых положений, при этом пресс-подборщик (70) содержит:
вал (3) и маховик (2), соединенный с валом (3);
плунжер (13), соединенный с маховиком (2) посредством кривошипа (6), при этом плунжер (13) выполнен с возможностью совершения возвратно-поступательного перемещения между ближним положением (7), в котором в прессовальную камеру может добавляться убираемый материал (80), и дистальным положением (8), в котором добавленный убираемый материал сдавливается в прессовальной камере (80);
тормозную систему (40), выполненную с возможностью обеспечения тормозного усилия (F2) для замедления маховика (2) в зависимости от сигнала (сигналов) управления тормозами;
по меньшей мере один датчик (43) для выдачи данных датчика, указывающих по меньшей мере одну движущуюся часть пресс-подборщика (70);
систему (47) управления тормозами, соединенную с по меньшей мере одним датчиком (43) для получения данных датчика и соединенную с тормозной системой (40) для выдачи сигнала (сигналов) управления тормозами, при этом система управления тормозами содержит систему обработки, снабженную алгоритмом для выдачи сигнала (сигналов) управления тормозами для остановки кривошипа (6) в диапазоне заданных стартовых положений,
при этом способ включает этапы:
a) определения начального времени (t6) на основании данных датчика;
b) прикладывания тормозного усилия (F2) в определяемое начальное время (t6).
10. Способ по п. 9, в котором данные датчика указывают скорость (ω) кривошипа и положение (Θ) кривошипа, и при этом этап а) включает определение, в качестве начального времени (t6), времени, когда угловая скорость уменьшилась ниже пороговой скорости (ωth), а кривошип находится в положении внутри порогового угла или миновал его (Θthr).
11. Способ по п. 10,
в котором по меньшей мере один датчик представляет собой бесконтактный датчик, расположенный с пороговым углом (Θthr), и при этом система обработки соединена с блоком синхронизации;
и причем этап (а) способа включает этапы:
c) получения временного значения от блока синхронизации;
d) преобразования данных датчика в угловую скорость (ω).
12. Способ по п. 10 или 11,
в котором по меньшей мере один датчик представляет собой датчик абсолютного положения, выполненный с возможностью выдачи данных, указывающих угловое положение (Θ) кривошипа,
и при этом этап (а) способа включает этап:
с) преобразования данных датчика в данные (ω) угловой скорости.
13. Способ по п. 10,
в котором по меньшей мере один датчик представляет собой датчик относительного положения, выполненный с возможностью выдачи данных, указывающих относительное угловое положение (Θ) кривошипа,
и при этом этап (а) способа включает этапы:
c) преобразования данных датчика в данные (ω) угловой скорости,
d) определения зоны (zC) сжатия в данных угловой скорости;
e) присвоения времени, соответствующего окончанию зоны (zC) сжатия, начального времени (t6).
14. Способ по п. 10,
в котором по меньшей мере один датчик представляет собой датчик скорости, выполненный с возможностью выдачи данных, указывающих (ω) угловую скорость кривошипа,
и при этом этап (а) способа включает этапы:
d) определения зоны (zC) сжатия в данных угловой скорости;
e) присвоения времени, соответствующего окончанию зоны (zC) сжатия, начального времени (t6).
15. Машиночитаемый носитель, содержащий компьютерный программный продукт, который, при выполнении в системе обработки, выдает команды для выполнения способа по любому из пп. 9-14.
| Способ приготовления лака | 1924 |
|
SU2011A1 |
| Пресс-подборщик | 1987 |
|
SU1501971A1 |
| Кожух маховика пресс- подборщика | 1984 |
|
SU1189387A1 |
| ПРИВОД ПРЕСС-ПОДБОРЩИКА | 0 |
|
SU306815A1 |
| DE 10145407 A1, 10.04.2003. | |||

