ОБЛАСТЬ ТЕХНИКИ, К КОТОРОЙ ОТНОСИТСЯ ИЗОБРЕТЕНИЕ
Настоящее изобретение относится к области сельскохозяйственных пресс-подборщиков для изготовления тюков посредством прессования сельскохозяйственного убираемого материала. Более конкретно, настоящее изобретение относится к запуску буксируемых квадратных пресс-подборщиков, имеющих тяжелый маховик для изготовления тюков высокой плотности.
УРОВЕНЬ ТЕХНИКИ
Когда для буксирования пресс-подборщика используют трактор, вал отбора мощности (ВОМ) трактора соединяют посредством маховика пресс-подборщика с редуктором, который приводит в движение различные механизмы, используемые в пресс-подборщике для подбирания сельскохозяйственной культуры с поля, для формирования сельскохозяйственной культуры в тюки и для оборачивания шпагата вокруг тюков. Между ВОМ и маховиком расположена односторонняя муфта, позволяющая маховику вращаться быстрее, чем ВОМ.
Для преодоления пиковых нагрузок, с которыми сталкивается редуктор пресс-подборщика, в пресс-подборщике, особенно в больших квадратных пресс-подборщиках, требуется большой маховик, и это создает проблему при запуске пресс-подборщика. ВОМ, когда приводится в действие двигателем трактора со скоростью, с которой его нужно поворачивать для приведения в движение пресс-подборщик в процессе нормальной работы, может быть неспособен обеспечивать высокий крутящий момент, необходимый для доведения маховика до его постоянной скорости (например, 1000 об/мин). В результате, когда пресс-подборщик сцепляют с трактором, а его маховик соединяют с ВОМ трактора, двигатель трактора может заглохнуть или механизм безопасности может расцеплять ВОМ и двигатель трактора из-за высокой нагрузки на ВОМ при запуске пресс-подборщика.
Решение данной проблемы, предложенное в EP 1974601, состоит в использовании гидравлического двигателя в дополнение к крутящему моменту, обеспеченному ВОМом при запуске поворота маховика пресс-подборщика. Данное решение является не полностью удовлетворительным, потому что оно требует мощного гидравлического двигателя с мощностью, сравнимой с мощностью ВОМ трактора.
Еще одно решение данной проблемы раскрыто в WO 2011060995, где описан трактор с коробкой передач, которая позволяет запускать пресс-подборщик в две фазы. В первой фазе маховик ускоряется до первой скорости с использованием первого передаточного отношения коробки передач, а во второй фазе маховик ускоряется до второй скорости с использованием второго передаточного отношения коробки передач. Недостаток данной технологии состоит в том, что она требует трактор с коробкой передач.
РАСКРЫТИЕ ИЗОБРЕТЕНИЯ
Задача вариантов осуществления настоящего изобретения состоит в том, чтобы создать пресс-подборщик с хорошим, например, усовершенствованным, протеканием запуска.
Также задача вариантов осуществления настоящего изобретения состоит в том, чтобы разработать способ модернизации существующего пресс-подборщика для усовершенствования протекания его запуска.
Вышеуказанные задачи достигаются с помощью способов и устройств согласно вариантам осуществления настоящего изобретения.
В первом аспекте настоящего изобретения предлагается пресс-подборщик, содержащий вал и маховик, соединенный с валом и выполненный с возможностью вращения в направлении вперед для изготовления тюков; плунжер, соединенный с маховиком посредством кривошипа, при этом плунжер выполнен с возможностью совершения возвратно-поступательного движения между ближним положением, в котором убираемый материал может добавляться в прессовальную камеру, и дистальным положением, в котором убираемый материал прессуется в прессовальной камере; и вспомогательный двигатель, соединенный с маховиком для запуска его вращения. Пресс-подборщик дополнительно содержит систему управления запуском, содержащую по меньшей мере один датчик, указывающий положение кривошипа; и блок управления, функционально соединенный по меньшей мере с одним датчиком и выполненный с возможностью управления вспомогательным двигателем для поворота маховика в обратном направлении в заданное стартовое положение.
За счет намеренного расположения маховика в заданном стартовом положении, при запуске, при ускорении за счет ВОМ трактора, маховик может получать большую кинетическую энергию, чем требуется для прессования убираемого материала, присутствующего в прессовальной камере. Другими словами, запуск из заданного стартового положения позволяет маховику «выдерживать» первое воздействие плунжера и продолжать вращение в виде успешного запуска.
Таким образом, значительно уменьшается или даже полностью устраняется риск неудач запуска. Это также уменьшает изнашивание трактора и пресс-подборщика, в частности муфты ВОМ, и снижает риск травм. Также повышается эффективность работы, поскольку больше не теряется время на многократный запуск.
За счет обеспечения системы управления запуском, содержащей датчик, маховик может автоматически поворачиваться в направлении заданного стартового положения, которое является более эффективным, и гораздо безопаснее, особенно при работе поздно ночью, после длинного дня тяжелой работы.
За счет поворота назад (в обратном направлении), вспомогательному двигателю нет необходимости прессовать убираемый материал, оставшийся позади в прессовальной камере, таким образом, обратное вращение может выполняться при относительно низкой мощности и без необходимости опорожнения пресс-подборщика.
Вследствие того, что маховик и кривошип движутся в заданное стартовое положение, требования к запуску значительно снижены, и конструкция пресс-подборщика может в данном случае получить преимущества, например, за счет снижения массы маховика без повышения риска проблем запуска. Больше не требуется подгонять размеры деталей пресс-подборщика для самого неблагоприятного варианта.
Пресс-подборщик с описанной выше системой запуска требует менее мощного трактора, чем тот же самый пресс-подборщик без системы запуска. Таким образом, для запуска пресс-подборщика может использоваться более маленький и менее мощный трактор.
В пресс-подборщике согласно вариантам осуществления настоящего изобретения, заданным стартовым положением может быть угловое положение кривошипа с угловым расстоянием меньше чем 180°, измеренным в направлении вперед относительно положения кривошипа, в котором плунжер находится в своем дистальном положении, предпочтительно меньше чем 120°, более предпочтительно меньше чем 60°, наиболее предпочтительно меньше чем 30°.
За счет запуска из подобного углового положения, кривошип должен повернуться по меньшей мере на 180° перед тем, как плунжер достигнет своего дистального положения. Чем больше времени маховик должен ускоряться в процессе запуска, тем выше будет его угловая скорость и выше его кинетическая энергия при первом сжатии сельскохозяйственной культуры. Это позволяет маховику получать достаточную кинетическую энергию для гарантированного сохранения работоспособности при первом «воздействии плунжера», и, таким образом, предусматривает состояния гарантированного запуска без риска остановки двигателя трактора.
В пресс-подборщике согласно вариантам осуществления настоящего изобретения, по меньшей мере одним датчиком может быть датчик давления для измерения давления, оказываемого убираемым материалом на плунжер, а блок управления может быть выполнен с возможностью изменения направления вращения вспомогательного двигателя, пока измеренное давление больше, чем заданное пороговое давление.
В пресс-подборщике согласно вариантам осуществления настоящего изобретения, вспомогательным двигателем может быть электрический двигатель, датчиком может быть датчик для измерения рабочего параметра вспомогательного двигателя, а блок управления может быть выполнен с возможностью изменения направления вращения вспомогательного двигателя пока рабочий параметр больше, чем заданный пороговый параметр.
В пресс-подборщике согласно вариантам осуществления настоящего изобретения, по меньшей мере один датчик может быть выбран из группы ИК-датчика, емкостного датчика, магнитного датчика и индуктивного датчика. Индуктивный датчик является особенно предпочтительным, так как он проще и дешевле, чем датчики других типов. Подобный индуктивный датчик может находиться на редукторе главного привода пресс-подборщика и может быть выполнен с возможностью наблюдения за металлическим плечом кривошипа или прикрепленной к нему металлической пластиной.
В пресс-подборщике согласно вариантам осуществления настоящего изобретения, по меньшей мере один датчик может содержать первую и вторую части, при этом одна часть расположена на раме пресс-подборщика, а другая часть расположена на кривошипе.
Расположение частей датчика на раме является предпочтительным в том, что он может быть жестко установлен, легко доступен для электрических проводов и подвергается только умеренным центробежным силам, ударам или вибрациям.
Пресс-подборщик согласно вариантам осуществления настоящего изобретения может дополнительно содержать средство локальной активации для активации системы управления запуском для поворота маховика в обратном направлении в заданное стартовое положение.
Подобное средство локальной активации может, например, использоваться оператором, стоящим рядом с пресс-подборщиком. В качестве альтернативы, как будет описано дальше, система управления запуском также может запускаться дистанционно, например, водителем трактора изнутри трактора.
В вариантах осуществления настоящего изобретения, средство локальной активации может быть выбрано из группы кнопки, переключателя и ручки. Нажимная кнопка является весьма подходящей, поскольку блоку управления требуется только пусковой сигнал, а затем он берет на себя задачу автоматически привести пресс-подборщик в необходимое стартовое положение. При использовании переключателя или ручки может быть предусмотрена установка блоком управления переключателя или ручки назад в свое первоначальное положение, когда достигается стартовое положение.
Во втором аспекте настоящего изобретения предлагается комбинация трактора и пресс-подборщика, содержащая пресс-подборщик согласно любому варианту осуществления первого аспекта настоящего изобретения, имеющий первичный вал, соединяемый с маховиком; и трактор, имеющий ВОМ, соединяемый с первичным валом пресс-подборщика.
Тогда как в предшествующем уровне техники комбинация трактор-пресс-подборщик иногда запускалась, а иногда не запускалась, комбинация трактора и пресс-подборщика с системой запуска согласно вариантам осуществления настоящего изобретения, будет запускаться более часто. Конечно, если трактор не достаточно мощный, запуск будет всегда неудачным.
В комбинации трактора и пресс-подборщика согласно вариантам осуществления настоящего изобретения, трактор может дополнительно содержать средство дистанционной активации, функционально соединенное с системой управления запуском.
Это обеспечивает преимущество в том, что водитель трактора может, со своего водительского сиденья в тракторе, инициировать систему управления запуском для помещения маховика в положение запуска. Водителю не требуется слезать с трактора, что быстрее и безопаснее. Средством дистанционной активации может быть отдельное средство активации (например, выделенная кнопка) или оно может быть интегрировано в другую схему запуска.
В третьем аспекте настоящего изобретения предлагается способ модернизации существующего пресс-подборщика для поворота маховика в заданное стартовое положение. Пресс-подборщик содержит маховик, соединяемый с ВОМ трактора и выполненный с возможностью вращения в направлении вперед для изготовления тюков; и плунжер, соединенный с маховиком посредством кривошипа и выполненный с возможностью совершения возвратно-поступательного движения между ближним положением и дистальным положением в прессовальной камере (80). Способ включает дополнение пресс-подборщика вспомогательным двигателем, выполненным с возможностью поворота маховика в обратном направлении; и дополнение пресс-подборщика системой управления запуском, содержащей по меньшей мере один датчик и один блок управления, и соединение блока управления по меньшей мере с одним датчиком и с вспомогательным двигателем, при этом блок управления выполнен с возможностью приведения вспомогательного двигателя в действие в обратном направлении до тех пор, пока датчик не выдаст сигнал, указывающий, что достигнуто заданное стартовое положение.
Данный способ предусмотрен для пресс-подборщиков, не имеющих вспомогательного двигателя для изменения направления поворота маховика. За счет модернизации пресс-подборщика может быть улучшено прохождение его запуска.
В дополнительном аспекте настоящего изобретения предлагается способ модернизации существующего пресс-подборщика для поворота маховика в заданное стартовое положение. Пресс-подборщик содержит маховик, соединяемый с ВОМом трактора и выполненный с возможностью вращения в направлении вперед для изготовления тюков; и плунжер, соединенный с маховиком посредством кривошипа и выполненный с возможностью совершения возвратно-поступательного движения между ближним положением и дистальным положением в прессовальной камере; и вспомогательный двигатель для поворота маховика в обратном направлении. Способ включает дополнение пресс-подборщика системой управления запуском, содержащей по меньшей мере один датчик и один блок управления, и соединение блока управления по меньшей мере с одним датчиком и со вспомогательным двигателем, при этом блок управления выполнен с возможностью приведения вспомогательного двигателя в действие в обратном направлении до тех пор, пока датчик не выдаст сигнал, указывающий, что достигнуто заданное стартовое положение.
Данный способ предусмотрен для пресс-подборщиков, уже имеющих вспомогательный двигатель для изменения направления поворота маховика. За счет модернизации пресс-подборщика может быть улучшено прохождение его запуска.
Конкретные и предпочтительные аспекты изобретения изложены в сопровождающих независимых и зависимых пунктах формулы изобретения. При необходимости признаки из зависимых пунктов формулы изобретения могут быть объединены с признаками независимых пунктов формулы изобретения и с признаками других зависимых пунктов формулы изобретения, а не только как в явном виде изложено в формуле изобретения.
Данные и другие аспекты изобретения будут очевидны из варианта (вариантов) осуществления, описанных далее и поясненных, сделанных со ссылкой на них.
Краткое описание чертежей
ФИГ. 1 представляет собой вид сбоку части классического трактора и буксируемого пресс-подборщика.
ФИГ. 2 представляет собой увеличенный вид части пресс-подборщика фиг.1, на котором кривошип находится в неблагоприятном положении E для запуска.
ФИГ. 3 представляет собой увеличенный вид части пресс-подборщика фиг.1, на котором кривошип находится в благоприятном положении C для запуска.
ФИГ. 4 показывает пример скорости и соответствующей кинетической энергии маховика порожнего пресс-подборщика при запуске.
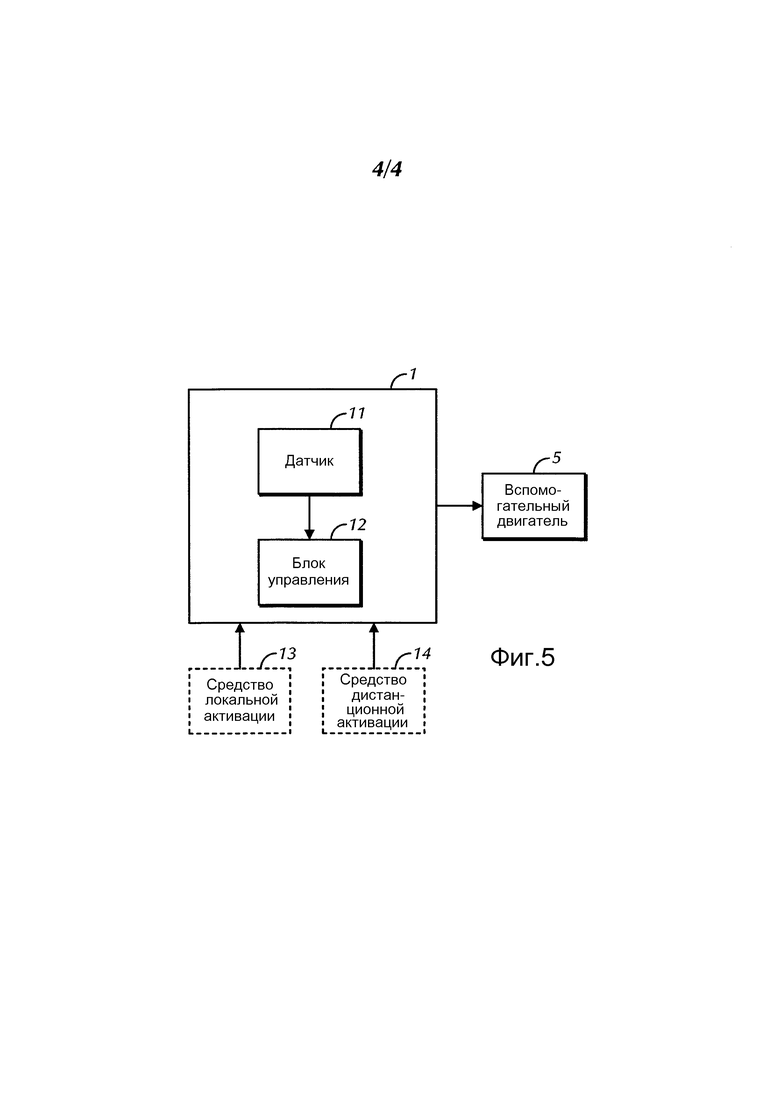
ФИГ. 5 схематично показывает систему управления запуском в качестве части пресс-подборщика настоящего изобретения.
Чертежи являются только схематичными и неограничивающими. На чертежах для иллюстративных целей размер некоторых элементов может быть преувеличен и нарисован не в масштабе.
Любые ссылочные позиций в формуле изобретения не следует истолковывать, как ограничение объема правовых притязаний.
На различных чертежах одинаковые ссылочные позиций относятся к одним и тем же или к аналогичным элементам.
ПОДРОБНОЕ ОПИСАНИЕ ИЛЛЮСТРАТИВНЫХ ВАРИАНТОВ ОСУЩЕСТВЛЕНИЯ ИЗОБРЕТЕНИЯ
Настоящее изобретение будет описано в отношении конкретных вариантов осуществления и со ссылкой на некоторые чертежи, но изобретение ограничено не ими, а только формулой изобретения. Описанные чертежи являются только схематичными, а не ограничивающими. На чертежах для иллюстративных целей размер некоторых элементов может быть увеличен, а не нарисован в масштабе. Размеры и относительные размеры не соответствуют фактическим сокращениям для применения изобретения на практике.
Кроме того, термины первый, второй и тому подобное в описании и в формуле изобретения, используются для проведения различия между аналогичными элементами, а не обязательно для описания последовательности, либо во времени, в пространстве, в ранжировании, либо любым другим образом. Следует понимать, что термины, используемые таким образом, являются взаимозаменяемыми в соответствующих обстоятельствах, и что варианты осуществления изобретения, описанные в данной заявке, допускают работу в других последовательностях, чем описано или проиллюстрировано в данной заявке.
Кроме того, термины верхний, нижний и тому подобное в описании и формуле изобретения используются для наглядных целей, а не обязательно для описания относительных положений. Следует понимать, что используемые таким образом термины являются взаимозаменяемыми в соответствующих обстоятельствах и что варианты осуществления изобретения, описанные в данной заявке, допускают работу в других ориентациях, чем описано или проиллюстрировано в данной заявке.
Следует отметить, что термин «содержащий», используемый в формуле изобретения, не следует интерпретировать в качестве ограничения средствами, перечисленными далее; он не исключает другие элементы или стадии. Таким образом, его следует интерпретировать в качестве уточнения наличия изложенных признаков, целых чисел, стадий или составных элементов, на которые делается ссылка, но не препятствия наличию или добавлению одного или более других признаков, целых чисел, стадий или составных элементов, или их групп. Таким образом, объем правовых притязаний выражения «устройство, содержащее средство А и B» не должен ограничиваться устройствами, состоящими только из составных элементов А и B. Это означает, что в отношении настоящего изобретения, единственными уместными составными элементами устройства являются А и B.
По всему данному описанию ссылка на «один вариант осуществления» или «вариант осуществления» означает, что конкретный признак, конструкция или характеристика, описанная в связи с вариантом осуществления, содержится по меньшей мере в одном варианте осуществления настоящего изобретения. Таким образом, появления фраз «в одном варианте осуществления» или «в варианте осуществления» в различных местах по всему данному описанию не обязательно все ссылаются на один и тот же вариант осуществления, но могут ссылаться. Кроме того, конкретные признаки, конструкции или характеристики могут быть объединены любым подходящим образом, как будет очевидно из данного раскрытия специалисту в данной области техники, в одном или более вариантах осуществления.
Аналогичным образом следует отметить, что в описании иллюстративных вариантов осуществления изобретения, различные признаки изобретения иногда сгруппированы вместе в едином варианте его осуществления, фигуре или описании с целью оптимизации раскрытия и содействия в понимании одного или более различных аспектов изобретения. Однако данный способ раскрытия не следует интерпретировать, как отражение намерения, что заявленное изобретение требует больше признаков, чем явно изложено в каждом пункте. Скорее, как отражает следующая формула изобретения, аспекты изобретения заключаются меньше чем во всех признаках единственного раскрытого выше варианта осуществления. Таким образом, формула изобретения вслед за подробным описанием явным образом включена настоящим в данное подробное описание, при этом каждый пункт сам по себе остается в качестве отдельного варианта осуществления данного изобретения.
Кроме того, несмотря на то, что некоторые варианты осуществления, описанные в данной заявке, включают некоторые, но не другие признаки, содержащиеся в других вариантах осуществления, комбинации признаков различных вариантов осуществления подразумеваются охваченные объемом правовых притязаний изобретения, и образуют различные варианты осуществления, как будет понятно специалистам в данной области техники. Например, в следующей формуле изобретения любой из заявленных вариантов осуществления может использоваться в любой комбинации.
В описании, представленном в данной заявке, изложено множество конкретных подробностей. Однако следует понимать, что варианты осуществления изобретения могут быть реализованы на практике без данных конкретных подробностей. В других случаях, хорошо известные способы, конструкции и технологии не были показаны подробно для того, чтобы не затруднять понимание данного описания.
Когда в вариантах осуществления настоящего изобретения делается ссылка на пресс-подборщики, делается ссылка на машины для формирования тюков из сельскохозяйственного убираемого материала, например, формирования тюков с кубовидной формой, называемых также прямоугольные тюки, с помощью любого подходящего средства, например, плунжеров.
Когда в вариантах осуществления настоящего изобретения делается ссылка на убираемый материал, делается ссылка на биомассу любого подходящего типа, которую можно убирать и упаковывать в тюки, такую как, например, сено, силос, солома или другую.
Когда в вариантах осуществления настоящего изобретения делается ссылка на подбирающие узлы, делается ссылка на узлы, которые выполнены с возможностью подбора убираемого материала, например валка, с земли и его подачи в последующий обрабатывающий блок, например, прессовальную камеру, сельскохозяйственной машины, например, сельскохозяйственной уборочной машины, такой как пресс-подборщик.
Когда в вариантах осуществления настоящего изобретения делается ссылка на «нормальную работу пресс-подборщика», имеется в виду состояние пресс-подборщика, в котором маховик поворачивается в направлении изготовления тюков.
Когда в вариантах осуществления настоящего изобретения делается ссылка на «нормальное направление» или «направление вперед» первичного вала или маховика или кривошипа пресс-подборщика, делается ссылка на направление поворота маховика в процессе нормального изготовления тюков.
Аналогичным образом, когда в вариантах осуществления настоящего изобретения делается ссылка на «обратное направление» или «направление назад» первичного вала или маховика или кривошипа пресс-подборщика, делается ссылка на направление вращения, противоположное нормальному направлению.
Когда в вариантах осуществления настоящего изобретения делается ссылка на «воздействие плунжера на убираемый материал», делается ссылка на момент времени, в котором противодействующая сила, прикладываемая к плунжеру прессуемым убираемым материалом, выше заданного порогового значения, например, выше 25 кН.
Когда в вариантах осуществления настоящего изобретения делается ссылка на «дистальное положение плунжера в прессовальной камере», имеется в виду такое положение, когда плунжер находится дальше всего от точки своего крепления к кривошипному валу.
Когда в вариантах осуществления настоящего изобретения делается ссылка на «тюки высокой плотности», имеются в виду тюки с плотность выше, чем 100, например выше, чем 190 кг/м3.
Со ссылкой на чертежи, фиг. 1 указывает пример сельскохозяйственного пресс-подборщика 70, содержащего раму 25, которая оборудована на своем переднем конце продолжающимся вперед дышлом 26 со сцепным средством (не показано) для соединения пресс-подборщика 70 с буксирующим трактором 17. Подбирающий узел 27 поднимает с поля уложенный в валки убираемый материал по мере того, как пресс-подборщик 70 движется мимо него, например, буксируемый трактором 17, и доставляет подобный материал к переднему концу изогнутого назад и вверх, формирующего партии подающего трубопровода 28. Трубопровод 28 сообщается на своем верхнем конце с находящейся сверху, продолжающейся продольно прессовальной камерой 80, в которую загружают партии сельскохозяйственной культуры с помощью действующего циклически набивочного механизма 29. Действующий непрерывно уплотняющий механизм 24 на нижнем переднем конце подающего трубопровода 28 непрерывно подает и уплотняет материал в трубопровод 28 таким образом, чтобы заставлять партии убираемого материала приобретать и принимать внутреннюю конфигурацию трубопровода 28 перед периодическим зацеплением набивочным механизмом 29 и введением вверх в прессовальную камеру 80. Уплотняющий механизм 24 может быть заменен роторным механизмом, который также будет непрерывно подавать и утрамбовывать материал в трубопровод 28. Подающий трубопровод 28 может быть оборудован средством (не проиллюстрированным) для установления, была ли в нем образована полная партия, и для управления в ответ на это набивочным механизмом 29. Каждое действие набивочного механизма 29 вводит «партию» или «ворох» убираемого материала из трубопровода 28 в камеру 80.
Плунжер 4 движется возвратно-поступательно в продольном направлении внутри прессовальной камеры 80, по меньшей мере внутри первой ее части. Биомасса или убираемый материал, подаваемый через подающий трубопровод 28, прессуется за счет этого, например, сдавливается или иным образом обрабатывается с тем, чтобы образовывать тюки при описанной выше работе сельскохозяйственного пресс-подборщика 70. Формируются тюки с кубической формой, также известные как «прямоугольные тюки». Затем сформированные тюки могут передвигаться вперед за счет возвратно-поступательного движения плунжера 4 со сдвигом периодически и постепенно вдоль прессовальной камеры 80 в направлении выпускного отверстия 23, из которого тюки 16 в конечном итоге могут выбрасываться. Кроме того, пресс-подборщик 70 может содержать составные элементы, такие как узловязальный механизм, для автоматического завязывания завершенных тюков 16, например, шпагатом или аналогичным линейным изделием, чтобы сделать их устойчивыми, например, для транспортировки и хранения. После увязывания тюки 16 выгружают из выпускного отверстия 23 прессовальной камеры 80 на выгрузное устройство 31 в виде спускного желоба для плавного опускания тюков на уровень земли.
Большие пресс-подборщики 70, особенно прямоугольные пресс-подборщики для изготовления тюков высокой плотности имеют маховик 2 с относительно большим диаметром (например, в диапазоне от 75 до 130 см, например 110 см) и большой массой (например, в диапазоне от 300 до 1000 кг, например 700 кг) и высокой инерционной массой или энергетическим эквивалентом. Когда весь убираемый материал с одного поля спрессован в тюки 16, функционирование пресс-подборщика 70 временно останавливается, например, за счет отсоединения или отключения ВОМ трактора, так что маховик 2 будет замедляться до тех пор, пока не остановится, и соединенные функции, такие как подбирающий, утрамбовывающий или роторный механизм также отключаются. Затем пресс-подборщик 70 переводят на другое поле, обычно, несмотря на то, что в прессовальной камере 80 все-таки остается некоторое количество убираемого материала. По прибытии на следующее поле, подлежащее уборке, необходимо снова запустить пресс-подборщик 70, но было обнаружено, особенно у больших пресс-подборщиков, имеющих большой и тяжелый маховик 2, что вследствие высокой инерции маховика 2 могут возникать проблемы, особенно когда в прессовальной камере 80 все-таки остается убираемый материал, что может иметь место, поскольку пресс-подборщики 70 не всегда опорожняют между разными полями.
Авторы изобретения обнаружили, что проблема с запуском возникает, когда маховик 2 не «выдерживает» или не способен завершить первое воздействие плунжера на убираемый материал, т.е. когда плунжер 4 стопорится в процессе первого цикла сжатия убираемого материала в прессовальной камере 80, вскоре после запуска. Пример подобного положения запуска, когда это происходит, проиллюстрирован на фиг. 2, указывающей первоначальное состояние кривошипа 6 и плунжера 4 непосредственно перед запуском пресс-подборщика 70. В примере фиг. 2, кривошип 6 расположен на угловом расстоянии θ1, равном приблизительно -45°, относительно положения кривошипа 6, которое плунжер 4 бы принял, находясь в своем дистальном положении 8 внутри прессовальной камеры 80. Следовательно, кривошип 6 должен повернуться приблизительно на 45° перед тем, как плунжер 4 достигнет своего дистального положения. Когда пресс-подборщик 70 запускают из данного первоначального состояния кривошипа 6 и плунжера 4, маховик 2 не может получить достаточную скорость перед тем, как плунжер 4 столкнется или достигнет убираемого материала 18, например, соломы или силоса, в прессовальной камере 80, а двигатель трактора заглохнет, или механизм безопасности отсоединит ВОМ 15 от двигателя трактора, результатом чего является неудача запуска пресс-подборщика 70.
В процессе испытаний авторы изобретения заметили, что при выключении пресс-подборщика 70 и предоставлении ему возможности свободно замедляться, маховик 2 и кривошип 6 стремились автоматически поворачиваться в неблагоприятное состояние, например А или E на фиг. 2, соответствующее углу θ1, равному приблизительно -90° и приблизительно -45° соответственно, в результате силы тяжести, действующей на тяжелые плечи 6 кривошипа.
Авторы изобретения также обнаружили, что когда пресс-подборщик 70 запускали из благоприятного положения кривошипа, например положения C кривошипа на фиг.3, было обнаружено, что запуск пресс-подборщика 70 никогда не был неудачным. В положении C фиг. 3, кривошип 6 указывает угол θ2 с угловым расстоянием, равным приблизительно 300° относительно положения кривошипа 6, которое было бы принято после поворота маховика 2 в направлении F вперед до тех пор, пока плунжер 4 не достигнет своего дистального положения 8 внутри прессовальной камеры 80.
Данное поведение дополнительно исследовали и измеряли протекание запуска маховика 2 комбинации конкретного пустого пресс-подборщика 70 и конкретного трактора 17, при этом запуск иногда не удавался, как показано на фиг. 4. Квалифицированный специалист легко может построить аналогичные кривые для других комбинаций трактора 17 и пресс-подборщика 70, конечно при условии, что трактор 17 обладает достаточной мощностью для запуска пресс-подборщика 70 в наилучших условиях. В конкретном случае фиг.4, пустой пресс-подборщик 70 запускали с кривошипом 6 в положении A, но также может использоваться другое положение запуска, при этом измеряли угловую скорость ω(t) маховика 2 и построили график, как показано на фиг. 4. На горизонтальной оси относительное угловое положение θ кривошипа 6 показано относительно его положения запуска. Угловая скорость ω(t) маховика 2 показана на левой вертикальной оси, тогда как соответствующая кинетическая энергия маховика 2 показана на правой вертикальной оси. Следует отметить, что благодаря передаточному отношению редуктора маховик 2 поворачивается много раз на каждый поворот кривошипа. Показан только первый полный поворот кривошипа 6 после запуска, что соответствует множеству поворотов маховика 2, например от 18 до 28 поворотов. Как можно увидеть на фиг. 4, после поворота кривошипа 6 на 30° кинетическая энергия E1 маховика 2 после запуска составляет приблизительно 10 кДж, а угловая скорость ω1 маховика 2 составляет приблизительно 110 об/мин. Когда кривошип 6 поворачивается на 270°, кинетическая энергия E2 маховика 2 составляет приблизительно 115 кДж, а угловая скорость ω2 маховика 2 составляет приблизительно 380 об/мин. Точные цифры не важны, но из данного примера ясно, что чем больше времени имеет пресс-подборщик перед первым воздействием, тем больше угловая скорость. В примере соотношение ω2/ω1 угловых скоростей составляет приблизительно 380/110 = 3,45, но так как кинетическая энергия (только для вращательного движения) пропорциональна квадрату угловой скорости, соотношение E2/E1 кинетических энергий составляет приблизительно 115/10 = 11,5. Данный пример указывает, что при запуске из благоприятного положения запуска (называемого также «стартовое положение») кинетическая энергия маховика 2 перед первым воздействием плунжера 4 на убираемый материал 18 внутри прессовальной камеры 80 может быть увеличена в 11,5 раз (более чем в десять), по сравнению с запуском из неблагоприятного положения, такого как, например, положение кривошипа на фиг. 3. Следует отметить, что кривая кинетической энергии, показанная на фиг. 4, по меньшей мере для первого поворота кривошипа 6, равномерно увеличивается с углом θ вала кривошипа. Таким образом, чем больше значение θ, тем большую кинетическую энергию будет иметь маховик 2 перед «первым воздействием», т.е. перед тем, как плунжер 4 достигнет своего дистального положения 8 в камере 80 пресс-подборщика.
Принципом настоящего изобретения является предоставление пресс-подборщика 70, в котором маховик 2 получает достаточную кинетическую энергию перед первым воздействием плунжера 4 на убираемый материал 18 в прессовальной камере 80, или, говоря более точно, поскольку количеством убираемого материала 18 в прессовальной камере может быть переменное количество и может даже отсутствовать перед тем, как плунжер 4 достигнет своего дистального положения 8. Это получается за счет поворота маховика 2 в обратном направлении (т.е. назад) из любого положения, в котором кривошип 6 был остановлен, (например, из положения E на фиг. 2) в заданное стартовое положение (например, положение C на фиг. 3). Чтобы гарантировать, что маховик 2 благополучно, правильно и эффективно движется обратно в соответствии с вариантами осуществления настоящего изобретения, это выполняется автоматически посредством системы 1 управления запуском, содержащей по меньшей мере один датчик 11 для определения положения кривошипа 6 и блок 12 управления, соединенный с выходным сигналом датчика 11, при этом блок управления выполнен с возможностью управления вспомогательным двигателем 5 для поворота маховика 2 в обратном направлении R до тех пор, пока кривошип 6 не достигнет заданного стартового положения. При запуске из данного стартового положения риск проблем при запуске уменьшается, если не полностью устраняется.
Таким образом, при условии, что кривошип 6 находится в положении C (фиг. 3), пресс-подборщик 17 теперь может быть запущен, например, за счет соединения или зацепления первичного вала 3 пресс-подборщика с ВОМом 15 трактора (фиг. 1). Маховик 2 приводится в действие в нормальном направлении F (т.е. вперед) из положения C кривошипа (заданного стартового положения), и к тому времени, когда плунжер 4 достигает убираемый материал 18, маховик 2 будет иметь достаточную приобретаемую кинетическую энергию для сдавливания убираемого материала 18 и продолжения вращения. В процессе первого сжатия маховик 2 на самом деле будет терять часть своей кинетической энергии (например, от 0 до 25 кДж, в зависимости от количества и состояния убираемого материала 18 в прессовальной камере 80), но благодаря запуску из заданного стартового положения, несмотря на потерю энергии в процессе сжатия будет оставаться достаточное количество кинетической энергии для того, чтобы маховик 2 мог продолжать вращение. Как правило, маховик будет замедляться до тех пор, пока плунжер 4 не достигнет своего дистального положения 8, но снова будет ускоряться для увеличения своей кинетической энергии для следующего сжатия. Поскольку кривошип 6 теперь имеет почти полный поворот, он не только восстановит потерю энергии в процессе первого воздействия, но будет ускоряться дальше и т.д., и продолжит ускорение в процессе следующих поворотов до тех пор, пока не достигнет своей номинальной скорости (например, 1000 об/мин).
В варианте осуществления системы запуска, датчиком 11 является датчик давления, выполненный с возможностью измерения давления, оказываемого убираемым материалом 18 на плунжер 4, а блок 12 управления выполнен с возможностью изменения направления вращения вспомогательного двигателя 5 до тех пор, пока измеренное давление равно или больше, чем заданное пороговое давление. Данный способ не будет работать для пустого пресс-подборщика 70, но для пустого пресс-подборщика нет проблемы запуска, и блок 12 управления легко может быть выполнен с возможностью включения данного условия, например, когда двигатель 5 был активирован дольше, чем заданное время, не сталкиваясь с пороговым значением, тогда обратное движение может остановиться, так как тогда любое положение запуска будет обоснованным стартовым положением.
Аналогичное поведение может достигаться за счет использования электрического вспомогательного двигателя 5 и посредством измерения рабочего параметра, например, тока в качестве показателя крутящего момента, прикладываемого вспомогательным двигателем против давления, оказываемого убираемым материалом 18 в прессовальной камере 80. Когда рабочий параметр, например, ток достигает заданного порогового значения, блок 12 управления должен остановить обратное движение.
В еще одном варианте осуществления заданное стартовое положение выбирают в качестве положения, в котором кривошип 6 указывает заданное угловое расстояние, измеренное в (положительном) направлении F вперед, до положения, которое кривошип 6 принял бы, когда плунжер 4 находится в своем дистальном положении 8. заданное угловое расстояние θ предпочтительно находится в диапазоне от 0 до 180°, предпочтительно менее чем 120°, или менее чем 90°, или менее чем 60°, или менее чем 30°. Углы больше, чем 120° также будут работать, но могут потребовать более мощного вспомогательного двигателя 5 для прессования убираемого материала 18. Углы больше, чем 180°, например 200°, также могут работать, но не рекомендуются, потому что маховик 2 будет получать меньшую кинетическую энергию, увеличивая таким образом риск остановки.
Могут использоваться различные типы датчиков 11, например, датчиком 11 может быть ИК-датчик, или емкостной датчик, или магнитный датчик, или индуктивный датчик, или датчик любого другого подходящего типа, известного квалифицированному специалисту в данной области. Датчик может иметь, но не должен иметь, множество взаимодействующих частей, например, ИК-передатчик и ИК-приемник. Датчик или части датчика могут находиться в нескольких местах, например на маховике 2, на раме 25 пресс-подборщика, на кривошипе 6, в прессовальной камере 80, на плунжере 4 и т.д. Например, в варианте осуществления ИК-передатчик установлен на кривошипе 6, а ИК-приемник установлен на раме 25 или наоборот. В еще одном примере индуктивный передатчик установлен на кривошипе 6, а индуктивный приемник установлен на раме 25. В еще одном примере, первая часть магнитного датчика установлена на плунжере 4, а другая часть магнитного датчика установлена в прессовальной камере 80. В еще одном альтернативном варианте осуществления, датчик предусмотрен, например, на плунжере, чтобы следить за камерой, или датчик предусмотрен в камере, чтобы следить за плунжером.
Датчик 11 может относиться к типу, который выдает сигнал включения/выключения, например импульс, свидетельствующий о том, что кривошип 6 находится в заданном положении или нет. Датчик 11 также может относиться к типу, который взаимодействует с кодовым датчиком для определения абсолютного положения, например абсолютного угла кривошипа 6 или абсолютного угла маховика 2, который может быть преобразован в абсолютное положение кривошипа, принимая в расчет передаточное отношение редуктора. Можно использовать один или более датчиков 11, например два датчика 11, выполненных с возможностью выявления не только положения плунжера 4, но также направления его передвижения.
В простом примере системы 1 управления запуском датчик 11 установлен на раме 25 пресс-подборщика около положения C и выполнен с возможностью выдачи первого сигнала (например, тока первого заданного значения, например 20 мА), когда кривошип 6 находится под углом θ между 35° и 55°, измеренным в направлении F вперед, в положение кривошипа 6, которое было бы принято, когда плунжер 4 находится в своем дистальном положении 8, а в противном случае выполнен с возможностью выдачи второго сигнала (например, тока второго заданного значения, например 4 мА). Блок 12 управления системы 1 управления запуском будет ожидать команды, поданной оператором, например, за счет нажатия локального средства активации, такого как кнопка 13, для подготовки пресс-подборщика для запуска, блок 12 управления будет активировать датчик 11 и будет принимать сигнал, свидетельствующий о положении кривошипа 6. Если датчик 11 подает сигнал первого заданного значения, блок 12 управления не будет активировать вспомогательный двигатель 5, потому что кривошип 6 уже находится в заданном стартовом положении. Однако, если, и при условии, что блок 12 управления принимает сигнал второго заданного значения, он приведет в действие вспомогательный двигатель 5 в обратном направлении R, например, с постоянной скоростью, для поворота маховика 2 и кривошипа 6 в заданное стартовое положение до тех пор, пока он не примет от датчика 11 сигнал с первым заданным значением, и затем он останавливает вспомогательный двигатель 5. Тогда пресс-подборщик 17 готов для запуска. В качестве альтернативы, обратное действие может быть объединено с действием запуска, т.е. действием, когда оператор нажимает кнопку для запуска пресс-подборщика 70, система запуска сперва будет поворачивать обратно маховик 2 до тех пор, пока пресс-подборщик не будет находится в заданном стартовом положении, а затем автоматически запустит пресс-подборщик 70 или подаст оператору сигнал включить муфту ВОМ.
В варианте данной простой системы 1 управления запуском блок 1 управления выполнен с возможностью приведения в действие вспомогательный двигатель 5 дополнительно в течение заданного периода времени после получения от датчика 11 первого сигнала. За счет этого, стартовое положение может адаптироваться или программироваться путем использования таймера, без необходимости замены датчика (датчиков). Еще одно преимущество будет состоять в том, что датчик 11 может быть помещен в более удобное место, не затрагивая стартовое положение.
Можно использовать более сложные блоки 12 управления, например, не используя постоянную скорость обратного движения, но ускоряя и затормаживая вспомогательный двигатель 5 для минимизации времени, требующегося для передвижения пресс-подборщика в заданное стартовое положение. В варианте осуществления, вспомогательный двигатель 5 выполнен с возможностью функционального соединения с маховиком 2 для изменения направления вращения и отсоединения от маховика 2, когда пресс-подборщик находится в нормальном режиме работы. В варианте осуществления, блок 12 управления выполнен с возможностью подачи предупреждающего сигнала, например, звукового или светового сигнала, поворачивая в то же время кривошип 6 назад. В варианте осуществления, блок 12 управления выполнен с возможностью выдачи сигнала «готовности» при достижении стартового положения для того, чтобы оператор отключил муфту ВОМ.
Система 1 управления запуском предназначена для использования только тогда, когда маховик 2 стоит на месте. Она может иметь дополнительный датчик для проверки, остановился ли маховик 2 фактически перед включением вспомогательного двигателя 5. Систему 1 управления запуском необходимо запускать или активировать, например, посредством средства 13 локальной активации, например, нажимной кнопки, установленной на раме 25 пресс-подборщика. В варианте осуществления систему 1 управления запуском включают с помощью средства 14 дистанционной активации, например, переключателя или ручки в тракторе 17, соединенном с пресс-подборщиком 70, или даже на блоке управления пресс-подборщиком, который установлен на сенсорном экране в кабине трактора. Вместо отдельного переключателя или ручки, средство 14 дистанционной активации также может быть интегрировано в схему управления трактора. Например, оно может быть интегрировано таким образом, что единственная команда для запуска пресс-подборщика 70 автоматически сперва включает систему 1 управления запуском для изменения направления поворота маховика 2 с целью размещения кривошипа 6 в заданном стартовом положении, затем ожидает от системы 1 управления запуском сигнала «готовности», а затем автоматически запускает пресс-подборщик 70, и все это с помощью единственной команды.
Вспомогательным двигателем 5 может быть, например, гидравлический или электрический двигатель. Он может быть постоянно соединен с первичным валом 3 или маховиком 2 пресс-подборщика 70, или может быть выполнен с возможностью отсоединения от первичного вала 3 и маховика 2 в процессе нормальной работы пресс-подборщика, дабы избежать какого-либо отрицательного воздействия, например потери энергии или изнашивания.
Благодаря системе 1 управления запуском, описанной выше, комбинации трактора 17 и пресс-подборщика 70 имеют пониженный риск остановки двигателя трактора или активации механизма перегрузки ВОМ в процессе запуска пресс-подборщика 70. Кроме того, система 1 управления запуском позволяет использование менее мощных тракторов 17 с заданным типом пресс-подборщика 70.
Также предложен способ модернизации существующего пресс-подборщика для улучшения протекания его запуска. В первом варианте осуществления способа модернизации существующего пресс-подборщика, пресс-подборщик 70 уже имеет вспомогательный двигатель 5, способный приводить в действие маховик 2, в каком случае в пресс-подборщик 70 добавляют систему 1 управления запуском, содержащую по меньшей мере один датчик 11 и блок 12 управления, предпочтительно наряду со средством локальной или дистанционной активации. Во втором варианте осуществления способа модернизации существующего пресс-подборщика 70, пресс-подборщик еще не имеет вспомогательный двигатель 5, способный двигать маховик 2 в обратном направлении. В этом случае в пресс-подборщик 70 также дополнительно добавляют вспомогательный двигатель 5.
Ссылочные позиции
1 Система управления запуском
2 Маховик
3 Вал
4 Плунжер
5 Вспомогательный двигатель
6 Кривошип
7 Ближнее положение
8 Дистальное положение
11 Датчик
12 Блок управления
13 Средство локальной активации
14 Средство дистанционной активации
15 ВОМ трактора
16 Тюк
17 Трактор
18 Убираемый материал
23 Выпускное отверстие
24 Уплотняющий механизм
25 Рама
26 Продолжающееся вперед дышло
27 Подбирающий узел
28 Подающий трубопровод
29 Набивочный механизм
31 Выгрузное устройство
46 Редуктор
70 Пресс-подборщик
80 Прессовальная камера
θ Угловое положение или угловое расстояние
E Кинетическая энергия
ω Угловая скорость
F Направление вперед/нормальное
R Направление назад/обратное



Группа изобретений относится к сельскому хозяйству и может быть использована при прессовке тюков. Пресс-подборщик содержит маховик, плунжер, вспомогательный двигатель для поворота маховика в обратном направлении и систему управления запуском. Плунжер соединен с маховиком посредством кривошипа. Система управления запуском содержит датчик для выдачи сигнала о положении кривошипа и блок управления для управления вспомогательным двигателем для поворота маховика в обратном направлении в заданное стартовое положение. Использование группы изобретений позволяет маховику получить достаточную кинетическую энергию перед первым воздействием плунжера при следующем запуске, что обеспечивает надежный запуск пресс-подборщика. 4 н. и 8 з.п. ф-лы, 5 ил.
1. Пресс-подборщик (70), содержащий:
- вал (3) и маховик (2), соединенный с валом (3) и выполненный с возможностью вращения в направлении (F) вперед для изготовления тюков (16);
- плунжер (4), соединенный с маховиком (2) посредством кривошипа (6) и выполненный с возможностью совершения возвратно-поступательного движения между ближним положением (7), в котором убираемый материал (18) может добавляться в прессовальную камеру (80), и дистальным положением (8), в котором убираемый материал (18) сдавливается в прессовальной камере (80);
- вспомогательный двигатель (5), соединяемый с маховиком (2) для запуска поворота маховика (2),
отличающийся тем, что
пресс-подборщик (70) дополнительно содержит систему (1) управления запуском, содержащую:
- по меньшей мере один датчик (11), указывающий положение кривошипа (6);
- блок (12) управления, соединенный по меньшей мере с одним датчиком (11) и выполненный с возможностью управления вспомогательным двигателем (5) для поворота маховика (2) в обратном направлении (R) в заданное стартовое положение.
2. Пресс-подборщик (70) по п. 1, в котором заданным стартовым положением является угловое положение (θ) кривошипа (6) с угловым расстоянием, равным менее чем 180°, измеренным в направлении (F) вперед относительно положения кривошипа, в котором плунжер (4) находится в своем дистальном положении (8), предпочтительно менее чем 120°, более предпочтительно менее чем 60°, наиболее предпочтительно менее чем 30°.
3. Пресс-подборщик (70) по любому из предшествующих пунктов, в котором по меньшей мере одним датчиком (11) является датчик давления для измерения давления, оказываемого убираемым материалом (18) на плунжер (4), при этом блок (12) управления выполнен с возможностью изменения направления вращения вспомогательного двигателя (5) до тех пор, пока измеренное давление больше, чем заданное пороговое давление.
4. Пресс-подборщик (70) по п. 1, в котором вспомогательным двигателем (5) является электрический двигатель, а датчиком является датчик для измерения рабочего параметра вспомогательного двигателя (5), при этом блок (12) управления выполнен с возможностью изменения направления вращения вспомогательного двигателя (5) до тех пор, пока рабочий параметр больше, чем заданный пороговый параметр.
5. Пресс-подборщик (70) по п. 1, в котором по меньшей мере один датчик (11) выбран из группы из ИК-датчика, емкостного датчика, магнитного датчика и индуктивного датчика.
6. Пресс-подборщик (70) по п. 1, в котором по меньшей мере один датчик (11) содержит первую и вторую части, при этом одна часть расположена на раме (25) пресс-подборщика, а другая часть расположена на кривошипе (6).
7. Пресс-подборщик (70) по п. 1, дополнительно содержащий средство (13) локальной активации для активации системы (1) управления запуском для поворота маховика (2) в обратном направлении (R) в заданное стартовое положение.
8. Пресс-подборщик (70) по п. 7, в котором средство (13) локальной активации выбрано из группы из кнопки, переключателя и ручки.
9. Комбинация трактора и пресс-подборщика, содержащая:
- пресс-подборщик (70) по любому из предшествующих пунктов, имеющий первичный вал (3), соединяемый с маховиком (2);
- трактор (17), имеющий ВОМ (15), соединяемый с первичным валом пресс-подборщика (70).
10. Комбинация трактора и пресс-подборщика по п. 9, в которой трактор (17) дополнительно содержит средство (15) дистанционной активации, функционально соединенное с системой (1) управления запуском.
11. Способ модернизации существующего пресс-подборщика (70) для поворота маховика (2) в заданное стартовое положение,
при этом пресс-подборщик содержит маховик (2), соединяемый с ВОМом (15) трактора и выполненный с возможностью вращения в направлении (F) вперед для изготовления тюков (16); и плунжер (4), соединенный с маховиком (2) посредством кривошипа (6) и выполненный с возможностью совершения возвратно-поступательного движения между ближним положением (7) и дистальным положением (8) в прессовальной камере (80);
при этом способ включает:
a) дополнение пресс-подборщика (70) вспомогательным двигателем (5), выполненным с возможностью поворота маховика (2) в обратном направлении (R);
b) дополнение пресс-подборщика (70) системой (1) управления запуском, содержащей по меньшей мере один датчик (11) и один блок (12) управления, и соединение блока (12) управления по меньшей мере с одним датчиком (11) и со вспомогательным двигателем (5), при этом блок (12) управления выполнен с возможностью приведения в действие вспомогательного двигателя (5) в обратном направлении (R) до тех пор, пока датчик (11) не выдаст сигнал, указывающий, что достигнуто заданное стартовое положение.
12. Способ модернизации существующего пресс-подборщика (70) для поворота маховика (2) в заданное стартовое положение,
при этом пресс-подборщик содержит маховик (2), соединяемый с ВОМом (15) трактора и выполненный с возможностью вращения в направлении (F) вперед для изготовления тюков (16); и плунжер (4), соединенный с маховиком (2) посредством кривошипа (6) и выполненный с возможностью совершения возвратно-поступательного движения между ближним положением (7) и дистальным положением (8) в прессовальной камере (80); и вспомогательный двигатель (5) для поворота маховика (2) в обратном направлении (R);
при этом способ включает:
дополнение пресс-подборщика (70) системой (1) управления запуском, содержащей по меньшей мере один датчик (11) и один блок (12) управления, и соединение блока (12) управления по меньшей мере с одним датчиком (11) и со вспомогательным двигателем (5), при этом блок (12) управления выполнен с возможностью приведения в действие вспомогательного двигателя (5) в обратном направлении (R) до тех пор, пока датчик (11) не выдаст сигнал, указывающий, что достигнуто заданное стартовое положение.
| Приспособление для суммирования отрезков прямых линий | 1923 |
|
SU2010A1 |
| EP 1974601 A1, 01.10.2008 | |||
| Пресс-подборщик | 1987 |
|
SU1501971A1 |
| ПРИВОД ПРЕСС-ПОДБОРЩИКА | 0 |
|
SU306815A1 |
| Перегрузочный предохранитель дляпРиВОдНОгО ВАлА ТюКОВОгО пРЕССА- пОдбОРщиКА | 1976 |
|
SU840542A1 |

