Предлагаемый способ относится к системам автоматизации контроля электрохимической защиты стальных подземных коммуникаций, в том числе магистральных трубопроводов транспортировки нефти и газа, и может использоваться при оснащении контролируемых пунктов (КП) устройствами телемеханики в системах дистанционного контроля электрохимической защиты.
Долговечность подземных коммуникаций, к которым, в частности, относятся стальные трубопроводы и другие металлические сооружения, в значительной степени зависит от надежной защиты от блуждающих токов, возникающих вблизи источников постоянного тока (электрифицированные железные дороги, трамвайные пути и др.). Напряжения, наводимые блуждающими токами, могут достигать сотен вольт и вызывать интенсивную коррозию. В связи с этим подземные коммуникации оснащаются дренажными установками, которые сбрасывают наводимую энергию на землю. Контроль за функционированием дренажных установок осуществляется периодическим наблюдением или дистанционно с помощью устройств телемеханики, которые питаются от промышленной сети.
Известны способы дистанционного контроля системы дренажной защиты подземных коммуникаций (Авт. свид. СССР №№1.303.955, 1.330.597, 1.565.071; патенты на полезную модель №№41.876, 92.661, 111.665; патенты РФ №№2.023.053, 2.095.473, 2.209.439, 2.229.704, 2.287.832, 2.308.702, 2.426.996, 2.473.098; патенты США №№4.196.055, 4.493.239, 5.321.318; патенты Германии №№3.135.639, 3.438.013; патент Франции №2.332.481; Стрижевский Н.В и др. Защита металлических сооружений от подземной коррозии. - М.: Недра, 1981, с. 217 и другие).
Из известных способов наиболее близким к предлагаемому является «Способ дистанционного контроля устройства дренажной защиты подземной коммуникации» (патент РФ №2.426.996, G01R 17/00, 2009), который и выбран в качестве прототипа.
Указанный способ включает сбор данных от дренажной установки и передачу их с контрольного пункта на диспетчерский пункт по каналам беспроводной связи. Питание приемопередающего оборудования и системы сбора данных осуществляется источником питания, состоящим из преобразователя блуждающих токов и накопителя энергии, подключенным одним из входов к источнику блуждающих токов, а другим - к заземленному электроду, в качестве которого может быть использован заземленный корпус дренажной установки. Емкость накопителя энергии источника питания рассчитывают на основании мониторинга уровня блуждающих токов и напряжений.
Надежность защиты подземных коммуникаций во многом определяется качеством радиосвязи между контрольным и диспетчерским пунктами. При этом указанная радиосвязь работает в симплексном режиме, что не всегда удовлетворяет практическим требованиям.
Технической задачей изобретения является повышение надежности дистанционного контроля устройства дренажной защиты подземной коммуникации путем применения дуплексной радиосвязи между контрольным диспетчерским пунктами с использованием двух частот и сложных сигналов с фазовой манипуляцией.
Поставленная задача решается тем, что способ дистанционного контроля устройства дренажной защиты подземной коммуникации, включающий в соответствии с ближайшим аналогом сбор данных от дренажной установки и передачу их с контрольного пункта на диспетчерский пункт по каналам беспроводной связи, при этом питание приемопередающего оборудования и системы сбора данных осуществляют источником питания, подключенным одним из входов к источнику блуждающих токов, а второй вход источника питания соединяют с заземленным электродом, в качестве которого может быть использован заземленный корпус дренажной установки, предварительно на контрольном пункте проводят мониторинг уровня блуждающих токов и напряжений, на основании которого определяют их периодичность и интенсивность, после чего рассчитывают емкость накопителя энергии источника питания, отличается от ближайшего аналога тем, что между контрольным и диспетчерским пунктами устанавливают дуплексную радиосвязь, для чего на контрольном пункте формируют высокочастотное колебание на несущей частоте ωс, манипулируют его по фазе в соответствии с модулирующим кодом M1(t), содержащим информацию о состоянии дренажного устройства, сформированный сложный сигнал с фазовой манипуляцией преобразуют по частоте с использованием частоты ωг1 первого гетеродина, выделяют напряжение первой промежуточной частоты ωпр1, равной сумме частот ωпр1=ωс+ωг1=ω1, усиливают его по мощности, излучают в эфир на частоте ω1, принимают на диспетчерском пункте, усиливают по мощности, преобразуют по частоте с использованием частоты ωг1 второго гетеродина, выделяют напряжение второй промежуточной частоты ωпр2,=ωпр1-ωг1, перемножают его с напряжением первого гетеродина, выделяют сложный сигнал с фазовой манипуляцией на частоте ωг1 второго гетеродина, осуществляют его синхронное детектирование с использованием в качестве опорного напряжения напряжение второго гетеродина и выделяют низкочастотное напряжение, пропорциональное модулирующему коду M1(t), на диспетчерском пункте формируют высокочастотное колебание на несущей частоте ωс, манипулируют его по фазе в соответствии с модулирующим кодом M2(t), содержащим информацию о командах управления, сформированный сложный сигнал с фазовой манипуляцией преобразуют по частоте с использованием частоты ωг2 первого гетеродина, выделяют напряжение третьей промежуточной частоты ωпр3, равной разности частот ωпр3=ωг2-ωс=ω2, усиливают его по мощности, излучают в эфир на частоте ω2, принимают на контрольном пункте, усиливают по мощности, преобразуют по частоте с использованием частоты ωг2 второго гетеродина, выделяют напряжение второй промежуточной частоты ωпр2, равной разности частот ωпр2=ωг2-ω2, перемножают его с напряжением первого гетеродина, выделяют сложный сигнал с фазовой манипуляцией на частоте ωг2 второго гетеродина, осуществляют его синхронное детектирование с использованием в качестве опорного напряжения напряжение второго гетеродина, выделяют низкочастотное напряжение, пропорциональное модулирующему коду M2(t), причем частоты ωг2 и ωг2 гетеродинов разносят на значение второй промежуточной частоты ωг2-ωг1=ωпр2, сложные сигналы с фазовой манипуляцией на контрольном пункте излучают на частоте ω1, а принимают на частоте ω2, а на диспетчерском пункте, наоборот, излучают на частоте ω2, а принимают на частоте ω1.
Структурная схема контрольного пункта представлена на фиг. 1. Структурная схема модема 3.1, размещенного на контрольном пункте, изображена на фиг. 2. Структурная схема модема 3.2, размещенного на диспетчерском пункте, изображена на фиг. 3. Частотная диаграмма, иллюстрирующая процесс преобразование сигналов, показана на фиг. 4.
На фиг. 2 введены следующие обозначения: 1 - подземная коммуникация; 2 - дренажная установка; 3.1 - модем, 4 - система сбора данных; 5 - источник питания с преобразователем блуждающих токов и накопителя энергии; 6 - источник блуждающих токов; 7 - заземленный электрод; 8.1 - приемопередающая антенна.
Каждый модем 3.1 (3.2) содержит последовательно включенные задающий генератор 9.1 (9.2), фазовый манипулятор 11.1 (11.2), второй вход которого соединен с выходом источника 10.1 (10.2) дискретных сообщений, первый смеситель 13.1 (13.2), второй вход которого соединен с выходом первого гетеродина 12.1 (12.2), усилитель 14.1 (14.2) первой промежуточной частоты, первый усилитель 15.1 (15.2) мощности, дуплексер 16.1 (16.2), вход-выход которого связан с приемопередающей антенной 8.1 (8.2), второй усилитель 17.1 (17.2) мощности, второй смеситель 19.1 (19.2), второй вход которого соединен с выходом второго гетеродина 18.1 (18.2), усилитель 20.1 (20.2) второй промежуточной частоты, перемножитель 21.1 (21.2), второй вход которого соединен с выходом первого гетеродина 12.1 (12.2), полосовой фильтр 22.1 (22.2) и фазовый детектор 23.1 (23.2), второй вход которого соединен с выходом второго гетеродина 18.1 (18.2), а выход является выходом модема 3.1 (3.2).
Предлагаемый способ реализуют следующим образом.
На контрольном пункте осуществляют сбор данных от дренажной установки 2 и передачу их на диспетчерский пункт по радиоканалу, причем питание системы 4 сбора информации и приемопередающего оборудования 3 осуществляется от преобразователя, подключенного к электродам 7, отстоящему на определенном расстоянии, в качестве которых, как пример, одним может служить рельс железной дороги или трамвайного пути, а другим - заземленный корпус дренажной установки 2.
Предварительно на контрольном пункте проводят мониторинг уровня блуждающих оков и напряжений, на основании которого определяют их периодичность и интенсивность, после чего рассчитывают необходимую емкость накопителя энергии источника питания 5.
Подключение преобразователя источника питания к разнесенным заземленным электродам обеспечивает накопление энергии от блуждающих токов для питания устройства телемеханики без непосредственного контакта с подземной коммуникацией. Это позволяет удовлетворить требование ГОСТ Ρ 51163-98 при защите подземного сооружения от блуждающих оков.
Предварительный мониторинг уровня блуждающих токов и напряжений на контрольном пункте обеспечивает получение исходных данных по их периодичности и интенсивности.
Установка накопителя энергии емкостью в соответствии с расчетной обеспечивает долговременное функционирование устройства телемеханики на контролируемом пункте и передачу данных с заданной периодичностью вне зависимости от регулярности прохождения поездов.
Используемый способ подключения преобразователя источника питания от токов наведения позволяет избежать его выход из строя в аварийных ситуациях, которые имеют место быть при эксплуатации электрифицированной ЖД (короткое замыкание контактного провода на рельс, неисправность двигателя локомотива).
Задающий генератор 9.1 формирует гармоническое колебание:
uc1(t)=Uc1⋅cos(ωct+ϕc1), 0≤t≤Тc1,
где Uc1, ωс, ϕc1, Tc1 - амплитуда, несущая частота, начальная фаза и длительность колебания;
которое поступает на первый вход фазового манипулятора 11.1, на второй вход которого подается модулирующий код M1(t) с выхода источника 10.1 дискретных сообщений, отражающий состояние дренажного устройства 2. На выходе фазового манипулятора 11.1 образуется сложный сигнал с фазовой манипуляцией (ФМн):
u1(t)=Uc1⋅cos[ωct+ϕk1(t)+ϕc1], 0≤t≤Тc1,
где ϕk1(t)={0, π} - манипулируемая составляющая фазы, отображающая закон фазовой манипуляции в соответствии с модулирующим кодом M1(t), причем ϕk1(t)=const при kτэ<t<(K+1)τэ и может измениться скачком при t=kτэ, т.е. на границах между элементарными посылками (К=1, 2, …, N1-1):
τэ, N1 - длительность и количество элементарных посылок, из которых составлен сигнал длительностью Tc1(Tc1=N1⋅τэ),
который поступает на первый вход первого смесителя 13.1, на второй вход которого подается напряжение первого гетеродина 12.1:
uг1(t)=Uг1⋅cos(ωг1t+ϕг1).
На выходе первого смесителя 13.1 образуются напряжения комбинационных частот. Усилителем 14.1 выделяется напряжение первой промежуточной (суммарной) частоты:
uпр1(t)=Uпр1⋅cos[ωпр1t+ϕk1(t)+ϕпр1], 0≤t≤Тс1,
где 
ωпр1=ωc+ωг1 - первая промежуточная (суммарная) частота;
ϕпр1=ϕс1+ϕг1.
Это напряжение после усиления в усилителе 15.1 мощности через дуплексер 16.1 поступает в приемопередающую антенну 8.1, излучается ею в эфир на частоте ω1=ωпр1, улавливается приемопередающей антенной 8.2 диспетчерского пункта 3.2 и через дуплексер 16.2 и усилитель 17.2 мощности поступает на первый вход второго смесителя 19.2, на второй вход которого подается напряжение uг1(t) гетеродина 18.2. На выходе смесителя 19.2 образуются напряжения комбинационных частот, усилителем 20.2 выделяется напряжение второй промежуточной (разностной) частоты:
uпр2(t)=Uпр2⋅cos[ωпр2t+ϕk1(t)+ϕпр2], 0≤t≤Тс1,
где 
ωпр2=ωпр1-ωг1 - вторая промежуточная (разностная) частота;
ϕпр2=ϕпр1-ϕг1,
которое поступает на первый вход перемножителя 21.2.
На второй вход перемножителя 21.2 подается напряжение гетеродина 12.2:
uг2(t)=Uг2⋅cos(ωг2t+ϕг2),
на выходе которого образуется напряжение:
u2(t)=U2⋅cos[ωг1t-ϕk1(t)+ϕг1], 0≤t≤Тс1,
где 
которое выделяется полосовым фильтром 22.2 и поступает на первый (информационный) вход фазового детектора 23.2, на второй (опорный) вход которого подается напряжение uг1(t) гетеродина 18.2. В результате синхронного детектирования на выходе фазового детектора 23.2 образуется низкочастотное напряжение:
uнс(t)=Uнс⋅cos ϕk1(t), 0≤t≤Тс1,
где 
Это напряжение содержит сведения о состоянии дренажного устройства, об уровне блуждающих токов и напряжении и о несанкционированном доступе в бокс контрольного пункта.
На основе анализа полученной информации диспетчер определяет периодичность и интенсивность блуждающих токов и напряжений, рассчитывает необходимую емкость накопителя энергии источника питания 5.
Расчет необходимой емкости накопителя энергии производится на основе данных мониторинга с учетом пребывающего коэффициента, обеспечивающего работоспособность не только при регулярном движении электропоездов, но и в перерывах до 100 суток.
Расчет производится примерно следующим образом.
Энергия, потребляемая в час системой сбора данных и модемом, определяется усредненным током потребления, включающим постоянное потребление контроллера и периодическое модемом. Для конкретного оборудования постоянное потребление контроллера не превышает 0,1 мА, в режиме передачи данных по радиоканалу передатчик потребляет до 0,3 А при напряжении 12 В. Передача данных предусмотрена два раза в час по 10 секунд.
Таким образом, за час расходуется в целом 80 Дж. Баланс энергии показывает, что для данного участка накопление энергии за час обеспечивается функционированием контрольного пункта от 60 до 75 часов. Превышающий коэффициент учитывает падение емкости накопителя энергии по мере разряда и вышеупомянутые возможные паузы в движении электропоездов. Полагая коэффициент падения емкости равным 0,5 и продолжительность паузы 100 суток, или 2400 часов, оцениваем превышающий коэффициент как 2400/(0,5⋅75)=60 и определяем емкость накопителя энергии 0,167⋅60=10 А/ч, что является типичным для автономного оборудования передачи данных. С возобновлением движения электропоездов заряд накопителя энергии возобновится.
На основе анализа полученной информации диспетчер принимает решение, направленное на изменение режима мониторинга блуждающих токов и напряжений на контрольном пункте.
По команде диспетчера задающим генератором 9.2 формируется гармоническое колебание:
uc2(t)=Uс2⋅cos(ωct+ϕс2), 0≤t≤Тc1,
которое поступает на первый вход фазового манипулятора 11.2, на второй вход которого подается модулирующий код M2(t) с выхода источника 10.2 дискретных сообщений. В качестве модулирующего кода M2(t) могут быть сигналы запроса о работе различных блоков контрольного пункта команды на включение или выключение исполнительных блоков и контроллера контрольного пункта и т.д. На выходе фазового манипулятора 11.2 образуется сложный сигнал с фазовой манипуляцией (ФМн):
u3(t)=Uc2⋅cos[ωct-ϕk2(t)+ϕc2], 0≤t≤Тс2,
который поступает на первый вход смесителя 13.2, на второй вход которого подается напряжение гетеродина 12.2:
uг2(t)=Uг2⋅cos(ωг2t+ϕг2)
на выходе смесителя 13.2 образуются напряжения комбинационных частот. Усилителем 14.2 выделяется напряжение третьей промежуточной частоты:
uпр3(t)=Uпр3⋅cos[ωпр3t+ϕk2(t)+ϕпр3], 0≤t≤Тс2,
где 
ωпр3=ωг2-ωс - третья промежуточная (разностная) частота;
ϕпр3=ϕг2+ϕс2.
Это напряжение после усиления в усилителе 15.2 мощности через дуплексер 16.2 поступает в приемопередающую антенну 8.2, излучает его в эфир на частоте ω2=ωпр3, улавливается приемопередающей антенной 8.1 контрольного пункта 3.1 и через дуплексер 16.1 и усилитель 17.1 мощности поступает на первый вход смесителя 19.1, на второй вход которого подается напряжение гетеродина 18.1:
uг2(t)=Uг2⋅cos(ωг2t+ϕг2).
На выходе смесителя 19.1 образуются напряжения комбинационных частот. Усилителем 20.1 выделяется напряжение второй промежуточной (разностной) частоты:
uпр4(t)=Uпр4⋅cos[ωпр2t+ϕk2(t)+ϕпр4], 0≤t≤Тс2,
где 
ωпр2=ωг2-ωпр3 - вторая промежуточная (разностная) частота;
ϕпр4=ϕг2-ϕпр3,
которое поступает на первый вход перемножителя 21.1, на второй вход которого подается напряжение гетеродина 12.1:
uг1(t)=Uг1⋅cos(ωг1t+ϕг1).
На выходе перемножителя 21.1 образуется напряжение:
u4(t)=U4⋅cos[ωг2t-ϕk2(t)+ϕг2], 0≤t≤Тс2,
где 
которое выделяется полосовым фильтром 22.1 и поступает на первый (информационный) вход фазового детектора 23.1, на второй (опорный) вход которого подается напряжение гетеродина 18.1
uг2(t)=Uг2⋅cos(ωг2t+ϕг2).
В результате синхронного детектирования на выходе фазового детектора 23.1 образуется низкочастотное напряжение
uн2(t)=Uн2⋅cos ϕk2(t), 0≤t≤Тс2,
где 
пропорциональное модулирующему коду M2(t). Это напряжение поступает на исполнительные блоки контрольного пункта.
Таким образом, предлагаемый способ по сравнению с прототипом и другими техническими решениями аналогичного назначения обеспечивает повышение надежности дистанционного контроля устройства дренажной защиты подземной коммуникации. Это достигается за счет применения дуплексной радиосвязи между контрольным и диспетчерским пунктами с использованием двух частот и сложных сигналов с фазовой манипуляцией.
Указанные сигналы обладают высокой помехоустойчивостью, энергетической и структурной скрытностью.
Энергетическая скрытность сложных ФМн сигналов обусловлена их высокой сжимаемостью во времени и по спектру при оптимальной обработке, что позволяет снизить мгновенную излучаемую мощность. Вследствие этого сложный ФМн сигнал в точке приема может оказаться замаскированными шумами и помехами. Причем энергия сложного ФМн сигнала отнюдь не мала, она просто распределена по частотно-временной области так, что в каждой точке этой области мощность сигнала меньше мощности шумов и помех.
Структурная скрытность сложных ФМн сигналов обусловлена большим разнообразием их форм и значительными диапазонами изменений параметров, что затрудняет оптимальную или хотя бы квазиоптимальную обработку сложных ФМн сигналов априорно неизвестной структуры с целью повышения чувствительности приемника.
Сложные ФМн сигналы открывают новые возможности и в технике передачи дискретных сообщений. Указанные сигналы позволяют применить новый вид селекции - структурную селекцию. Это значит, что появляется новая возможность разделять сигналы, действующие в одной и той же полосе частот и в одни и те же промежутки времени.
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ материально-технического обеспечения управления местоположением транспортного средства при восстановлении объектов инфраструктуры и система для его реализации | 2019 |
|
RU2724079C1 |
| Способ транспортировки твердых коммунальных отходов с управлением местоположением транспортного средства и система его реализации | 2022 |
|
RU2773736C1 |
| ДИСПЕТЧЕРСКАЯ СИСТЕМА КОНТРОЛЯ ДВИЖЕНИЯ ГОРОДСКОГО ТРАНСПОРТА | 2016 |
|
RU2630945C1 |
| СПОСОБ ТОЧНОГО ПОЗИЦИОНИРОВАНИЯ И МОНИТОРИНГА МОБИЛЬНЫХ ОБЪЕКТОВ | 2008 |
|
RU2365932C1 |
| ТЕРРИТОРИАЛЬНАЯ СИСТЕМА КОНТРОЛЯ ТРАНСПОРТИРОВКИ ОСОБО ВАЖНЫХ И ОПАСНЫХ ГРУЗОВ | 2016 |
|
RU2628986C1 |
| Компьютерная система дистанционного управления навигационными комплексами для автоматизированного мониторинга окружающей среды в условиях Арктики | 2019 |
|
RU2732318C1 |
| Способ и устройство автоматического управления процессами возделывания сельскохозяйственных культур | 2019 |
|
RU2725482C1 |
| СПОСОБ МОНИТОРИНГА ЛЕСНЫХ ПОЖАРОВ И КОМПЛЕКСНАЯ СИСТЕМА РАННЕГО ОБНАРУЖЕНИЯ ЛЕСНЫХ ПОЖАРОВ | 2017 |
|
RU2663246C1 |
| Компьютерная система дистанционного управления навигационными комплексами для автоматизированного мониторинга окружающей среды в условиях Арктики | 2019 |
|
RU2723928C1 |
| СПОСОБ МОНИТОРИНГА ЛЕСНЫХ ПОЖАРОВ И КОМПЛЕКСНАЯ СИСТЕМА РАННЕГО ОБНАРУЖЕНИЯ ЛЕСНЫХ ПОЖАРОВ | 2019 |
|
RU2703362C1 |
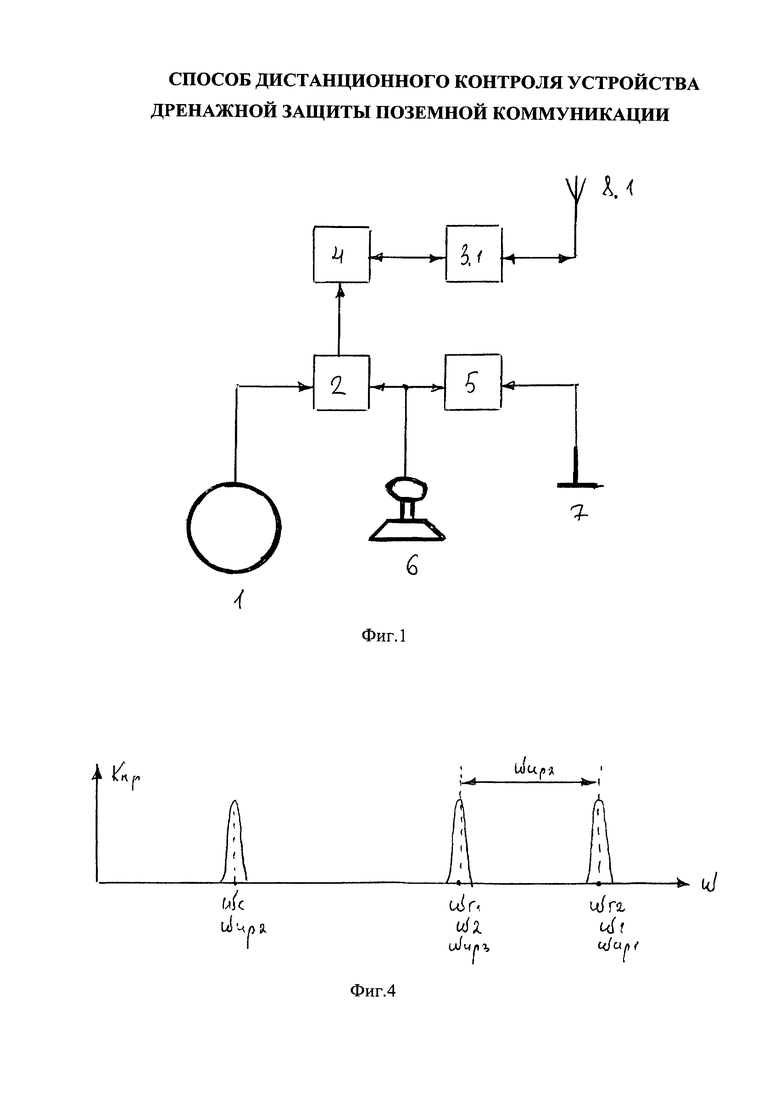
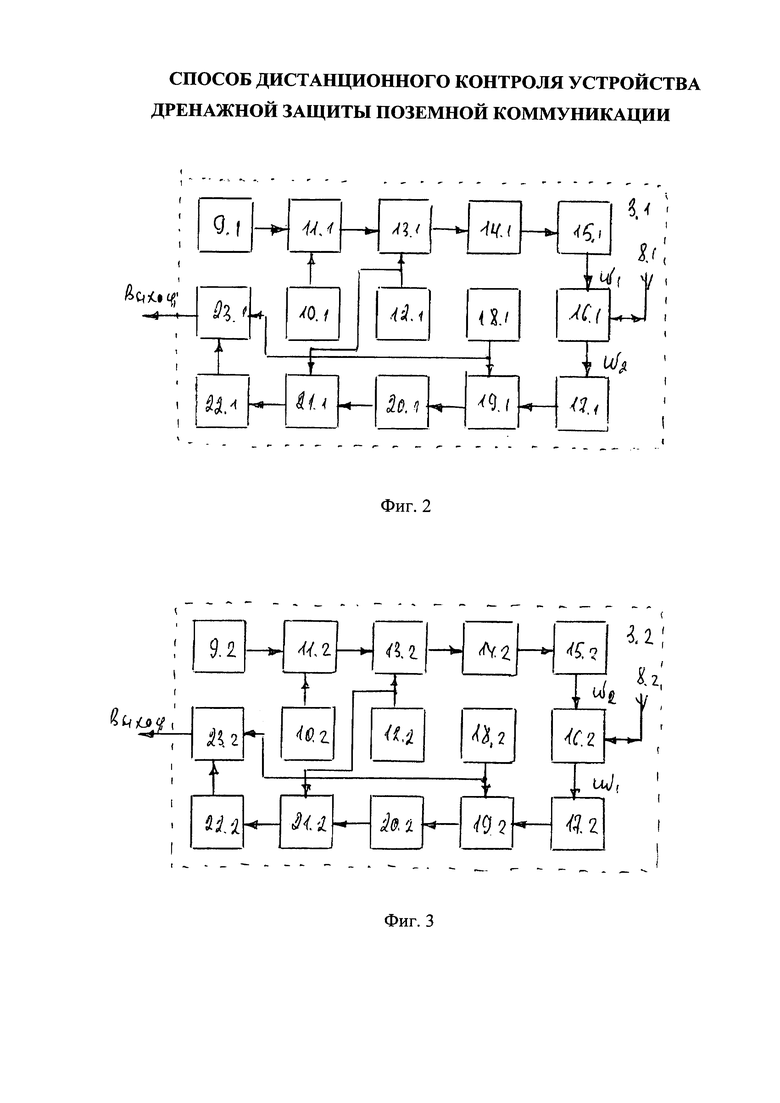
Предлагаемый способ относится к системам автоматизации контроля электрохимической защиты стальных подземных коммуникаций, в том числе магистральных трубопроводов транспортировки нефти и газа, и может использоваться при оснащении контролируемых пунктов (КП) устройствами телемеханики в системах дистанционного контроля электрохимической защиты. Устройство, реализующее предлагаемый способ, содержит подземную коммуникацию 1, дренажную установку 2, модемы 3.1 и 3.2, систему 4 сбора данных, источник 5 питания с преобразователем блуждающих токов и накопителем энергии, источник 6 блуждающих токов, заземленный электрод 7, приемопередающие антенны 8.1 и 8.2. Каждый модем 3.1 (3.2) содержит приемопередающую антенну 8.1 (8.2), задающий генератор 9.1 (9.2), источник 10.1 (10.2) дискретных сообщений, фазовый манипулятор 11.1 (11.2), первый гетеродин 12.1 (12.2), первый смеситель 13.1 (13.2), усилитель 14.1 (14.2) первой промежуточной частоты, первый усилитель 15.1 (15.2) мощности, дуплексер 16.1 (16.2), второй усилитель 17.1 (17.2) мощности, второй гетеродин 18.1 (18.2), второй смеситель 19.1 (19.2), усилитель 20.1 (20.2) второй промежуточной частоты, перемножитель 21.1 (21.2), полосовой фильтр 22.1 (22.2) и фазовый детектор 23.1 (23.2). Техническим результатом заявленного решения является повышение надежности дистанционного контроля устройства дренажной защиты подземной коммуникации путем применения дуплексной радиосвязи между контрольным и диспетчерским пунктами с использованием двух частот и сложных сигналов с фазовой манипуляцией. 4 ил.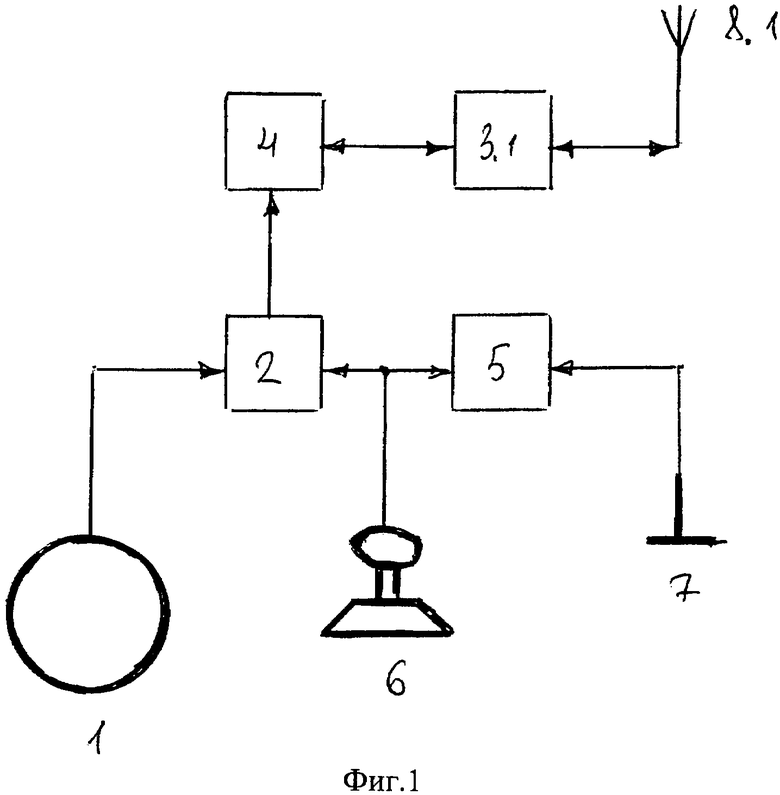
Способ дистанционного контроля устройства дренажной защиты подземной коммуникации, включающий сбор данных от дренажной установки и передачу их с контрольного пункта на диспетчерский пункт по каналам беспроводной связи, при этом питание приемопередающего оборудования и системы сбора данных осуществляют источником питания, подключенным одним из входов к источнику блуждающих токов, а второй вход источника питания соединяют с заземленным электродом, в качестве которого может быть использован заземленный корпус дренажной установки, предварительно на контрольном пункте проводят мониторинг уровня блуждающих токов и напряжений, на основании которого определяют их периодичность и интенсивность, после чего рассчитывают емкость накопителя энергии источника питания, отличающийся тем, что между контрольным и диспетчерским пунктами устанавливают дуплексную радиосвязь, для чего на контрольном пункте формируют высокочастотное колебание на несущей частоте ωс, манипулируют его по фазе в соответствии с модулирующим кодом М1(t), содержащим информацию о состоянии дренажного устройства, сформированный сложный сигнал с фазовой манипуляцией преобразуют по частоте с использованием частоты ωr1 первого гетеродина, выделяют напряжение первой промежуточной частоты ωпр1, равной сумме частот ωпр1=ωс+ωг1=ω1, усиливают его по мощности, излучают в эфир на частоте ω1, принимают на диспетчерском пункте, усиливают по мощности, преобразуют по частоте с использованием частоты ωг1 второго гетеродина, выделяют напряжение второй промежуточной частоты ωпр2, равной разности частот ωпр2=ωпр1-ωг1, перемножают его с напряжением первого гетеродина, выделяют сложный сигнал с фазовой манипуляцией на частоте ωг1 второго гетеродина, осуществляют его синхронное детектирование с использованием в качестве опорного напряжения напряжение второго гетеродина и выделяют низкочастотное напряжение, пропорциональное модулирующему коду M1(t), на диспетчерском пункте формируют высокочастотное колебание на несущей частоте ωс, манипулируют его по фазе в соответствии с модулирующим кодом M2(t), содержащим информацию о командах управления, сформированный сложный сигнал с фазовой манипуляцией преобразуют по частоте с использованием частоты ωг2 первого гетеродина, выделяют напряжение третьей промежуточной частоты ωпр3, равной разности частот ωпр3=ωг2-ωс=ω2, усиливают его по мощности, излучают в эфир на частоте ω2, принимают на контрольном пункте, усиливают по мощности, преобразуют по частоте с использованием частоты ωг2 второго гетеродина, выделяют напряжение второй промежуточной частоты ωпр2, равной разности частот ωпр2=ωг2-ω2, перемножают его с напряжением первого гетеродина, выделяют сложный сигнал с фазовой манипуляцией на частоте ωг2 второго гетеродина, осуществляют его синхронное детектирование с использованием в качестве опорного напряжения напряжение второго гетеродина, выделяют низкочастотное напряжение, пропорциональное модулирующему коду M2(t), причем частоты ωг1 и ωг2 гетеродинов разносят на значение второй промежуточной частоты ωг2-ωг1=ωпр2, сложные сигналы с фазовой манипуляцией на контрольном пункте излучают на частоте ω1, а принимают на частоте ω2, а на диспетчерском пункте, наоборот, излучают на частоте ω2, а принимают на частоте ω1.
| СПОСОБ ДИСТАНЦИОННОГО КОНТРОЛЯ УСТРОЙСТВА ДРЕНАЖНОЙ ЗАЩИТЫ ПОДЗЕМНОЙ КОММУНИКАЦИИ | 2009 |
|
RU2426996C2 |
| СПОСОБ КОНТРОЛЯ ТРАНСПОРТНЫХ СРЕДСТВ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2010 |
|
RU2427924C1 |
| ТЕРРИТОРИАЛЬНАЯ СИСТЕМА КОНТРОЛЯ ДВИЖЕНИЯ СПЕЦИАЛЬНЫХ ТРАНСПОРТНЫХ СРЕДСТВ | 2014 |
|
RU2582502C2 |
| US 5596267 A, 21.01.1997. | |||

