Предлагаемые способ и устройство относятся к области геодезии и космической навигации и могут быть использованы для контроля перемещения и местоположения транспортных средств с помощью спутниковой навигационной системы.
Известны способы и устройства контроля транспортных средств (патенты РФ №№2.222.830, 2.243.594, 2.257.616, 2.304.813, 2.382.416; патенты США №№6.266.627, 6.763.300. Автомобильный навигационный GPS тахограф «Гранит Р-БД-АЦ 02.» Проспект фирмы Suutel-Navigation и другие).
Из известных способов и устройств наиболее близкими к предлагаемым являются «Способ контроля транспортных средств и устройство для его осуществления» (патент РФ №2.304.813, G08G 1/123, 2005), которые выбраны в качестве прототипов.
Указанные технические решения включают размещение навигационного блока в блоке управления светофорами на регулируемом перекрестке, на регулируемом пешеходном переходе и на стационарном посту, синхронизацию режимов работы светофоров со всеми спутниковыми навигационными приемниками, запоминание параметров переключения светофоров во времени, выявление неисправностей в светофорах, оснащение навигационного блока транспортного средства блоком тревожных кнопок для вызова специальных служб, а также запись в навигационный блок транспортного средства регистрационных данных, государственного номера и пароля, границы региона, в котором в данное время находится транспортное средство, границ зон действия дорожных знаков и их изменений, передачу в стационарный пункт контроля тревожного сигнала при нарушении транспортным средством требований дорожных знаков, нападении на водителя, угоне или несанкционированном отключении навигационного блока транспортного средства от бортовой сети, а при нарушении его работоспособности включение звукового сигнала, функционирование всех навигационных блоков и светофоров в едином времени, диагностирование навигационного блока транспортного средства со стационарного пункта для определения правильности его функционирования и соответствия регистрационным данным, определение местоположения транспортного средства в дифференциальном режиме по отношению к спутниковым навигационным приемникам, установленным в блоках управления светофорами и на стационарном посту с известными координатами.
Все это обеспечивает возможность в бесконтактном режиме выявлять нарушения правил дорожного движения транспортными средствами, отслеживать и останавливать угнанные транспортные средства, выявлять транспортные средства с поддельным государственным номером, выявлять виновников дорожно-транспортных происшествий, вызывать из транспортного средства специальную службу (скорую помощь, пожарную команду, милицию, техпомощь, службу спасения, агента страховой компании и т.п.), диагностировать навигационный блок.
Эффективность известных технических решений в значительной степени зависит от надежности дистанционной связи и достоверности распознавания государственного регистрационного номера транспортного средства.
Технической задачей изобретения является повышение эффективности способа и устройства контроля транспортных средств путем использования дуплексной радиосвязи, двух частот, сложных сигналов с фазовой манипуляцией и идентификационных меток.
Поставленная задача решается тем, что способ контроля транспортных средств, при реализации которого, в соответствии с ближайшим аналогом, размещают стационарный пункт контроля, оснащенный блоком дистанционной связи и связанным с ним компьютером, снабженным блоком ввода в него цифровой навигационной карты местности, монитором с экраном для визуализации цифровой информации, средствами управления изображениями на этом экране и средствами формирования файлов данных, создаваемых в процессе контроля транспортного средства, визуализируют на экране монитора цифровую навигационную карту местности, а само транспортное средство оснащают навигационным блоком, оснащенным спутниковым приемником, блоком дистанционной связи, процессором, энергонезависимой памятью, средством индикации, блоком датчиков и исполнительных устройств, и определяющим параметры перемещения транспортного средства во времени, которые с помощью дистанционной связи запрашивают со стационарного пункта контроля и наносят на цифровую навигационную карту местности, при этом в качестве базовой станции с известными координатами используют блок управления светофорами на регулируемом перекрестке, на пешеходном переходе и на стационарном посту, в котором размещают навигационный блок, оснащенный спутниковым приемником, блоком дистанционной связи, процессором, энергонезависимой памятью, блоком датчиков и исполнительных устройств, навигационный блок с помощью блока датчиков и исполнительных устройств соединяют с коммутатором, осуществляющим управление работой светофоров, синхронизируют режимы работы светофоров со спутниковым навигационным приемником, запоминают переключение светофоров во времени в энергонезависимой памяти, а при необходимости изменяют режим работы светофоров со стационарного пункта контроля посредством блока дистанционной связи, выявляют неисправности в работе светофоров и информацию об этих неисправностях передают посредством блока дистанционной связи соответствующей службе, навигационный же блок транспортного средства оснащают блоком тревожных кнопок для вызова специальных служб, а также заносят в него регистрационные данные транспортного средства, его государственный номер и пароль, по которому осуществляют дистанционную связь стационарного пункта контроля с транспортным средством, границ региона, в котором в данное время находится транспортное средство, границы зон действия дорожных знаков и их изменения, а в стационарный пункт контроля передают тревожный сигнал при нарушении транспортным средством требований дорожных знаков, нападении на водителя, угоне или несанкционированном отключении навигационного блока транспортного средства от бортовой сети, а при нарушении его работоспособности включают звуковой сигнал, причем все навигационные блоки и светофоры функционируют в едином времени, диагностируют навигационный блок транспортного средства со стационарного пункта контроля для определения его исправности и соответствия регистрационным параметрам, а местоположение транспортного средства определяют в дифференциальном режиме по отношению к спутниковому навигационному приемнику, установленному в блоке управления светофорами и на стационарном посту, при движении мимо которого транспортного средства у него дистанционно определяют соответствие государственного номера, прикрепленного к транспортному средству, и фактического государственного номера, записанного в навигационном блоке самого транспортного средства, а также выявляют транспортное средство с неработающим навигационным блоком, отличается от ближайшего аналога тем, что каждое транспортное средство снабжают идентификационной меткой, которую размещают на государственном регистрационном номере, облучают ее гармоническим колебанием несущей частоты wc при прохождении транспортного средства мимо стационарного поста, осуществляют прием и преобразование гармонического колебания в акустическую волну, ее распространение по поверхности пьезокристалла, обратное отражение, преобразование в электромагнитный сигнал с фазовой манипуляцией, внутренняя структура которого соответствует структуре встречно-штыревого преобразователя идентификационной метки, которая соответствует государственному регистрационному номеру транспортного средства, излучают его в эфир, принимают на стационарном посту, усиливают по мощности, осуществляют синхронное детектирование с использованием гармонического колебания несущей частоты wс, выделяют низкочастотное напряжение, пропорциональное государственному регистрационному номеру облучаемого транспортного средства, и сравнивают с государственными регистрационными номерами, записанными в памяти стационарного поста, по результатам сравнения принимают решение о принадлежности государственного регистрационного номера данному транспортному средству, в каждом блоке дистанционный связи формируют высокочастотное колебание несущей частоты wс, манипулируют его по фазе модулирующим кодом M1(t) источника дискретных сообщений, сформированный сложный сигнал с фазовой манипуляцией преобразуют по частоте с использованием частоты wг1 первого гетеродина, выделяют напряжение первой промежуточной частоты wup1, равной сумме частот wг1=wc+wг1, усиливают его по мощности, излучают в эфир на частоте w1=wup1, принимают в другом блоке дистанционной связи, усиливают по мощности, преобразуют по частоте с использованием частоты wг1 гетеродина, выделяют напряжение второй промежуточной частоты wup2, равной разности частот wup2=w1-wг1, перемножают с напряжением второго гетеродина с частотой wг2, выделяют напряжение третьей промежуточной частоты wup3, равной разности частот wup3=wг2-wup2=wг1, представляющее собой сложный сигнал с фазовой манипуляцией на частоте wг1 первого гетеродина, осуществляют синхронное его детектирование с использованием напряжения первого гетеродина, при этом сложные сигналы с фазовой манипуляцией в блоке дистанционной связи стационарного пункта контроля излучают на частоте w2, а принимают на частоте w1, а сложные сигналы с фазовой манипуляцией в блоке дистанционной связи транспортных средств, стационарного поста и блоков управления светофорами, наоборот излучают на частоте w1, а принимают на частоте w2, частоты wг1 и wг2 гетеродинов разносят на значение второй промежуточной частоты
wг2-wг1=wup2.
Поставленная задача решается тем, что устройство для контроля транспортных средств, содержащее, в соответствии с ближайшим аналогом, размещенный в стационарном пункте контроля компьютер, соединенный с блоком дистанционной связи, и снабженный блоком ввода в него цифровой навигационной карты местности, монитором с экраном для визуализации цифровой информации и средствами управления изображениями на этом экране, а в самом транспортном средстве навигационный блок, снабженный спутниковым навигационным приемником с блоком дистанционной связи, процессором, энергонезависимой памятью, средством индикации, блоком датчиков и исполнительных устройств, а также размещенными в блоке управления светофорами на регулируемом перекрестке, на пешеходном переходе и на стационарном посту с известными координатами навигационный блок со спутниковым навигационным приемником, блоком дистанционной связи, процессором, энергонезависимой памятью, блоком датчиков и исполнительных устройств, при этом навигационный блок, установленный в блоке управления светофорами, посредством блока датчиков и исполнительных устройств связан с коммутатором, который соединен со световыми приборами светофоров и осуществляющий их включение в заданном порядке и выявление неисправностей, а в навигационный блок транспортного средства включен блок тревожных кнопок, соединенный с блоком датчиков и исполнительных устройств и предназначенный для вызова специальных служб, отличается от ближайшего аналога тем, что навигационный блок стационарного поста снабжен считывателем, связанным с процессором, а каждое транспортное средство снабжено идентификационной меткой, размещенной на государственном регистрационном номере, причем считыватель выполнен в виде последовательно подключенных к процессору задающего генератора, дуплексера, вход-выход которого связан с приемопередающей антенной, усилителя мощности и фазового детектора, второй вход которого соединен с выходом задающего генератора, а выход подключен к процессору, каждая идентификационная метка выполнена в виде пьезокристалла с нанесенным на его поверхность алюминиевым тонкопленочным встречно-штыревым преобразователем, связанным с микрополосковой антенной и набором отражателей, при этом встречно-штыревой преобразователь содержит две гребенчатые системы электродов, электроды каждой из гребенок соединены друг с другом шинами, связанными с микрополосковой антенной, каждый блок дистанционной связи выполнен в виде последовательно включенных задающего генератора, фазового манипулятора, второй вход которого соединен через формирователь модулирующего кода с процессором, первого смесителя, второй вход которого соединен с выходом первого гетеродина, усилителя первой промежуточной частоты, первого усилителя мощности, дуплексера, вход-выход которого связан с приемопередающей антенной, второго усилителя мощности, второго смесителя, второй вход которого соединен с выходом второго гетеродина, усилителя второй промежуточной частоты, перемножителя, второй вход которого соединен с выходом первого гетеродина, полосового фильтра и фазового детектора, второй вход которого соединен с выходом второго гетеродина, а выход является выходом блока дистанционной связи.
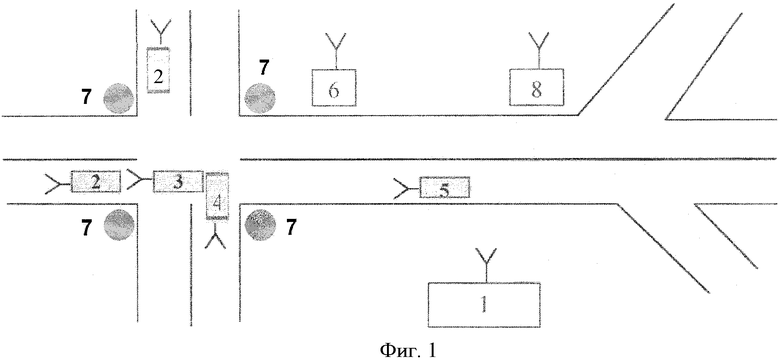
Схема дорожной обстановки представлена на фиг.1, где 1 - стационарный пункт контроля, 2 - транспортные средства, стоящие у перекрестка, 3 - транспортное средство, выехавшее на перекресток, на красный (запрещающий) сигнал светофора, и столкнувшееся с транспортным средством 4, которое выехало на перекресток на разрешающий (зеленый) сигнал светофора; 5 - транспортное средство, остановившееся в зоне действия знака "Остановка запрещена", 6 - блок управления светофорами, 7 - светофоры, 8 - стационарный пост.
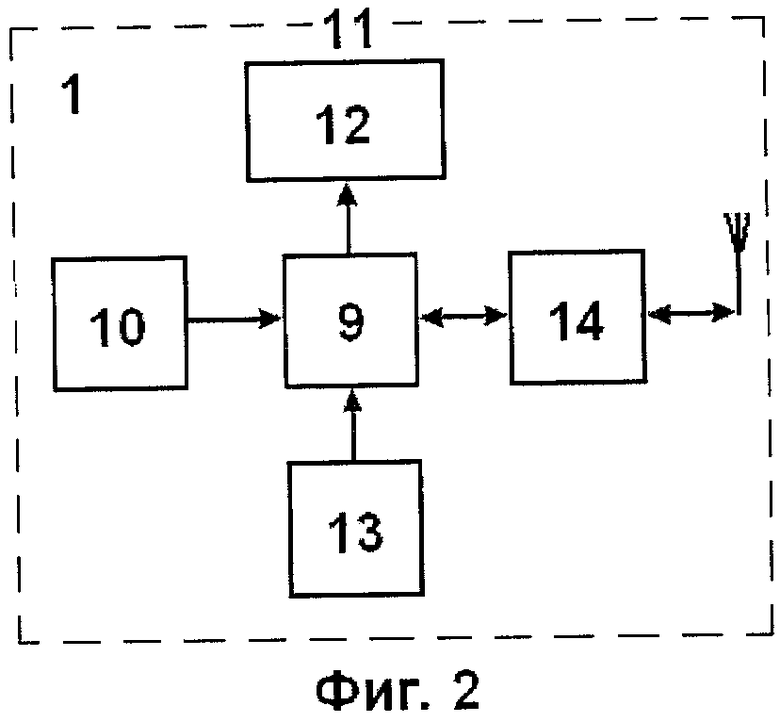
Структурная схема стационарного пункта контроля 1 представлена на фиг.2, где введены следующие обозначения: 9 - компьютер, к которому подключены блок ввода 10, монитор 11 с цифровой навигационной картой 12, средства управления изображениями 13 и блок 14 дистанционной связи.
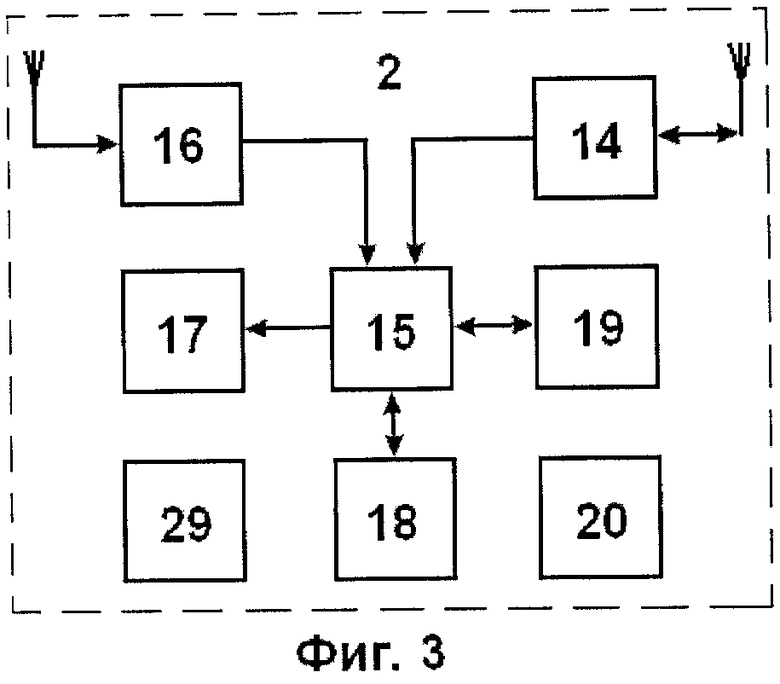
Структура навигационного блока 2 транспортного средства представлена на фиг.3, где введены следующие обозначения: 15 - процессор, 16 - спутниковый приемник, 14 - блок дистанционной связи, 17 - цифровое табло, 18 - энергонезависимая память, 19 - блок датчиков и исполнительных устройств, 20 - блок тревожных кнопок и идентификационная метка 29.
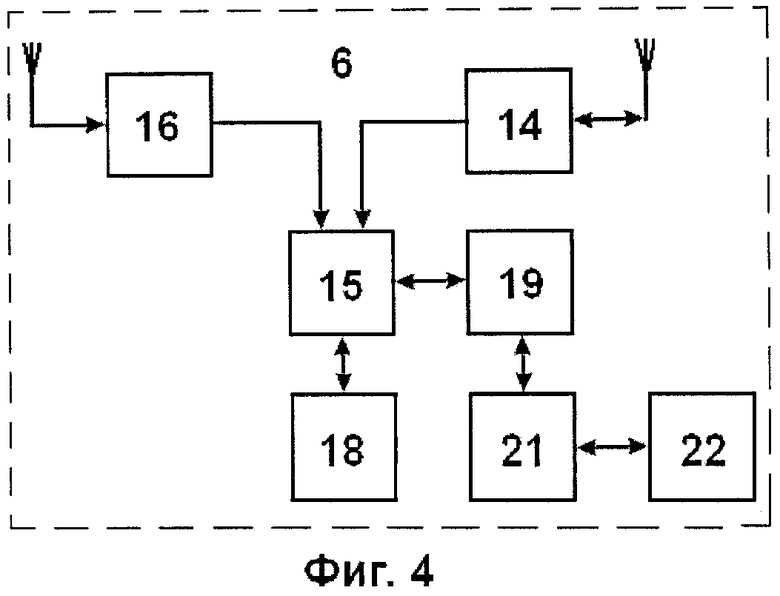
Структурная схема навигационного блока, установленного в блоке 6 управления светофорами, представлена на фиг.4, где введены следующие обозначения: 15 - процессор, 14 - блок дистанционной связи, 16 - спутниковый приемник, 18 - энергонезависимая память, 19 - блок датчиков и исполнительных устройств, 21 - коммутатор, 22 - световые приборы светофоров.
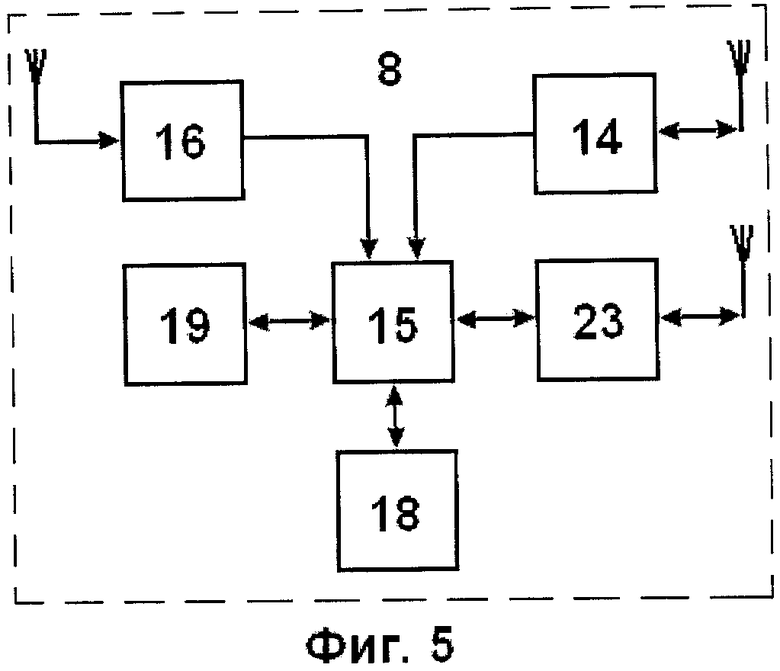
Структурная схема навигационного блока, установленного на стационарном посту 8, представлена на фиг.5, где введены следующие обозначения: 15 - процессор, 14 - блок дистанционной связи, 16 - спутниковый приемник, 18 - энергонезависимая память, 19 - блок датчиков и исполнительных устройств, 23 - считывающее устройство.
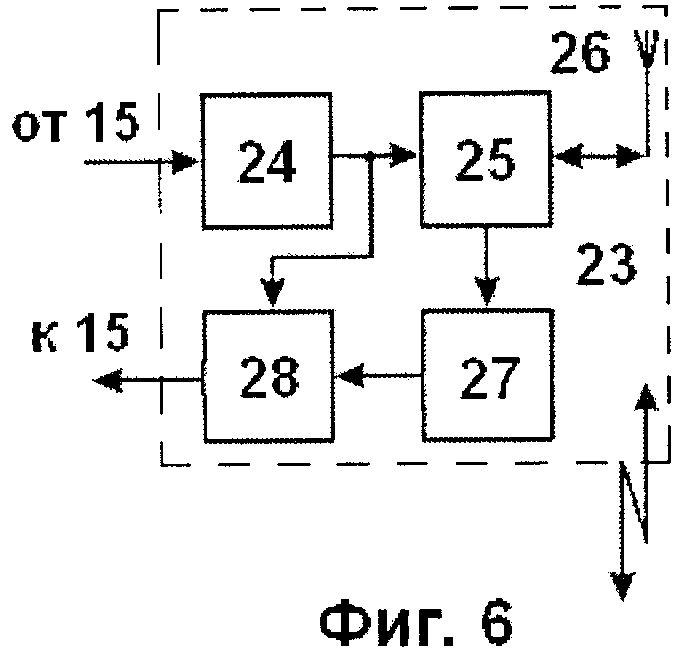
Структурная схема считывающего устройства 23 представлена на фиг.6, где введены следующие обозначения: 24 - приемопередающая антенна, 27 - усилитель мощности, 28 - фазовый детектор.
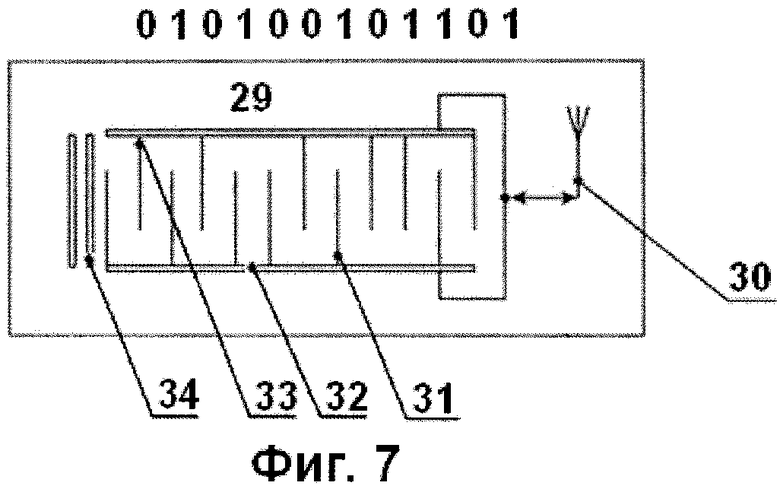
Электрическая схема идентификационной метки представлена на фиг.7, где введены следующие обозначения: 29 - пьезокристалл, 30 - микрополосковая приемопередающая антенна, 31 - электроды, 32, 33 - шины, 34 - набор отражателей.
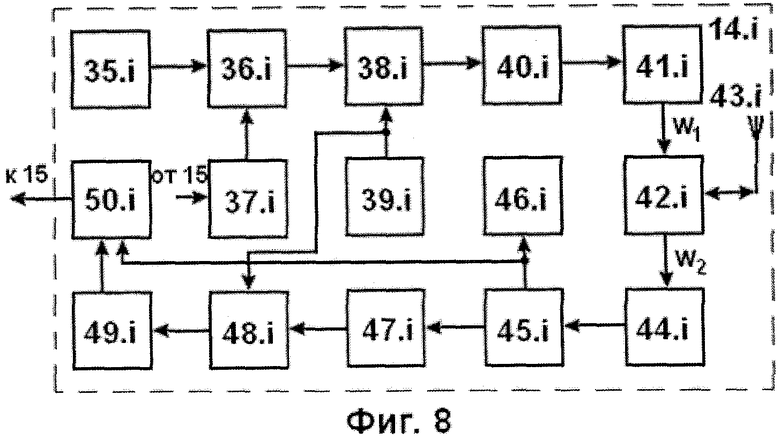
Структурная схема блока 14.1. дистанционной связи, установленного на транспортном средстве, стационарном посту и блоке управления светофорами, представлена на фиг.8.
Структурная схема блока 14, установленного на стационарном пункте контроля, представлена на фиг.9.
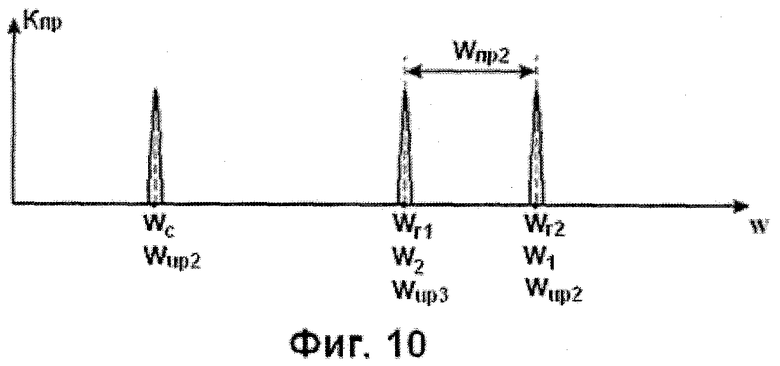
Частотная диаграмма, иллюстрирующая преобразование сигналов, изображена фиг.10.
Каждый блок 14 дистанционной связи содержит последовательно включенные задающий генератор 35.i (35), фазовый манипулятор 36.i (36), второй вход которого соединен с выходом источника 37.i (37) дискретных сообщений, первый смеситель 38.i (38), второй вход которого соединен с выходом первого гетеродина 39.i (39), усилитель 40.i (40) первой промежуточной частоты, первый усилитель 41.i (41) мощности, дуплексер 42.i (42), вход-выход которого связан с приемопередающей антенной 43.i (43), второй усилитель 44.i (44) мощности, второй смеситель 45.i (45), второй вход которого соединен с выходом второго гетеродина 46.i (46), усилитель 47.i (47) второй промежуточной частоты, перемножитель 48.i (48), второй вход которого соединен с выходом первого гетеродина 39.i (39), полосовой фильтр 49.i (49) и фазовый детектор 50.i (50), второй вход которого соединен с выходом второго гетеродина 46.i (46) (i=1, 2, …, n).
При практической реализации предлагаемого способа в память компьютера 9 (фиг.2), установленного в стационарном пункте 1 контроля (фиг.1), с помощью блока 10 ввода вводят цифровую навигационную карту 12 и визуализируют на экране монитора 11. С помощью средств 13 управления изображениями, в качестве которых может использоваться компьютерная "мышка" и клавиатура, при необходимости перемещают на экране монитора цифровую навигационную карту 12 и изменяют ее масштаб. Получаемую с помощью блока 14 дистанционной связи информацию о дорожной обстановке записывают в компьютер 9, как отдельный слой информации, и визуализируют на экране монитора 11 на фоне цифровой навигационной карты 12.
В энергонезависимую память 18 (фиг.3) навигационного блока транспортного средства при его регистрации (постановке на учет) записывают регистрационные данные транспортного средства (в том числе фамилию, имя, отчество владельца и его домашний адрес), его государственный регистрационный номер и пароль, по которому осуществляют дистанционную связь стационарного пункта 1 контроля с транспортным средством. Кроме того, в эту же память вводят границы региона, в котором в данное время находится транспортное средство, границы зон действия дорожных знаков и их изменения. На государственном регистрационном номере размещают идентификационную метку 29.
В случае возникновения дорожно-транспортного происшествия на регулируемом перекрестке (транспортные средства 3 и 4) или пешеходном переходе в стационарный пункт контроля 1 навигационный блок этих транспортных средств с помощью блока 14.i дистанционной связи (фиг.3) передает сообщение, сформированное автоматически процессором 15 при срабатывании датчиков, находящихся в блоке 19 датчиков и исполнительных устройств транспортного средства, или после нажатия соответствующей тревожной кнопки в блоке 20. Причем эта информация содержит все необходимые данные об этом транспортном средстве, в том числе его местоположение и время, и поступает на вход формирователя 37.1 модулирующего кода, который формирует модулирующий код M1(t). Последний поступает на первый вход фазового манипулятора 36.i. На второй вход последнего подается гармоническое колебание, сформированное задающим генератором 35.i
uc1(t)=Uc1·cos(wct+φc1), 0≤t≤Tc1.
На выходе фазового манипулятора 36.i образуется сложный сигнал с фазовой манипуляцией (ФМН)
u1(t)=Uc1·cos[wct+φк1(t)+φc1], 0≤t≤Tc1,
где φк1(t)={0; π} - манипулируемая составляющая фазы, отображающая закон фазовой манипуляции в соответствии с модулирующим кодом M1(t), причем φк1(t)=const при Кτэ<t(К+1)τэ и может изменяться скачком при t=Кτэ, т.е. на границах между элементарными посылками (К=1, 2,…, N1);
τэ, N1 - длительность и количество элементарных посылок, из которых составлен сигнал длительностью Tc1 (Tc1=N1·τэ);
который поступает на первый вход смесителя 38.i, на второй вход которого подается напряжение первого гетеродина 39.i
uг1(t)=Uг1·cos(wг1t+φг1).
На выходе смесителя 38.i образуются напряжения комбинационных частот.Усилителем 40.i выделяется напряжение первой промежуточной (суммарной) частоты
uup1(t)=Uпр1·cos[wup1t+φк1(t)+φup1], 0≤t≤Tc1,
где  ;
;
wup1=wc+wг1 - первая промежуточная (суммарная) частота;
φup1=φc1+φг1.
Это напряжение после усиления в усилителе 41.i мощности через дуплексер 42.i поступает в приемопередающую антенну 43.i, излучается ею в эфир на частоте w1=wup1, улавливается приемопередающей антенной 43 стационарного пункта 1 контроля и через дуплексер 42 и усилитель 44 мощности поступает на первый вход смесителя 45, на второй вход которого подается напряжение uг1(t) гетеродина 46. На выходе смесителя 45 образуются напряжения комбинационных частот. Усилителем 47 выделяется напряжение второй промежуточной (разностной) частоты
uup2(t)=Uпр2·cos[wup2t+φк1(t)+φup2], 0≤t≤Tc1,
где  ;
;
wup2=wup1-wг1 - вторая промежуточная (разностная) частота;
φup2=φup1-φг1,
которое поступает на первый вход перемножителя 48, на второй вход которого подается напряжение гетеродина 39
uг2(t)=Uг2·cos(wг2t+φг2).
На выходе перемножителя 48 образуется напряжение
u2(t)=U2·cos[wг1t-φк1(t)+φг1], 0≤t≤Tc1,
где  ,
,
которое выделяется полосовым фильтром 49 и поступает на первый (информационный) вход фазового детектора 50, на второй (опорный) вход которого подается напряжение uг1(t) гетеродина 46. В результате синхронного детектирования на выходе фазового детектора 50 образуется низкочастотное напряжение
uн1(t)=Uн1·cosφк1(t), 0≤t≤Tc1,
где  ,
,
пропорциональное модулирующему коду M1(t). Это напряжение поступает в компьютер 9. Аварийная ситуация отображается на экране монитора 11 (фиг.2) на фоне цифровой навигационной карты 12.
С целью выявления виновника этого дорожно-транспортного происшествия стационарный 1 пункт контроля по каналу дистанционной связи 14 (фиг.2) опрашивает навигационный блок, установленный в блоке 6 управления светофорами (фиг.1) на данном перекрестке, на предмет определения параметров работы светофоров в момент возникновения данного дорожно-транспортного происшествия. Для этого пароль и команды запроса из компьютера 9 поступают в формирователь 37 модулирующего кода, в котором формируется модулирующий код M2(t), который поступает на первый вход фазового манипулятора 36, на второй вход которого подается гармоническое колебание задающего генератора 35
uc2(t)=Uc2·cos(wct+φc2), 0≤t≤Tc2.
На выходе фазового манипулятора 36 образуется сложный ФМн-сигнал
u3(t)=Uc2·cos[wct+φк2(t)+φc2], 0≤t≤Tc2,
где φк2(t)={0; π} - манипулируемая составляющая фазы, отображающая закон фазовой манипуляции в соответствии с модулирующим кодом M2(t), который поступает на первый вход смесителя 38, на второй вход которого подается напряжение первого гетеродина 39
uг2(t)=Uг2·cos(wг2t+φг2).
На выходе смесителя 38 образуются напряжения комбинационных частот. Усилителем 40 выделяется напряжение третьей промежуточной частоты
uup3(t)=Uпр3·cos[wup3t-φк2(t)+φup3], 0≤t≤Tc2,
где  ;
;
wup3=wг2-wc=w2 - третья промежуточная (разностная) частота;
φup3=φг2-φс,
которое после усиления в усилителе 41 мощности через дуплексер 42 поступает в приемопередающую антенну 43, излучается ею в эфир на частоте w2=wup3, улавливается приемопередающей антенной 43.i блока 6 управления светофорами и через усилитель 44.i мощности поступает на первый вход смесителя 45.i, на второй вход которого подается напряжение uг2(t) гетеродина 46.i. На выходе смесителя 45.i образуются напряжения комбинационных частот. Усилителем 47.i выделяется напряжение второй промежуточной частоты
uup4(t)=Uup4·cos[wup2t+φк2(t)+φup4], 0≤t≤Tc2,
где  ;
;
wup2=wг2-wup3 - вторая промежуточная (разностная) частота;
φup4=φг2-φup3,
которое поступает на первый вход перемножителя 48.i, на второй вход которого подается напряжение uг1(t) гетеродина 39.i. На выходе перемножителя 48.i образуется напряжение
u3(t)=U3·cos[wг2t+φк2(t)+φг2], 0≤t≤Tc2,
где  ;
;
wг2=wup2+wг1,
которое выделяется полосовым фильтром 49.i и поступает на первый (информационный) вход фазового детектора 50.i, на второй (опорный) вход которого подается напряжение uг2(t) гетеродина 46.i. В результате синхронного детектирования на выходе фазового детектора 50.i образуется низкочастотное напряжение
uн2(t)=Uн2·cosφк2(t), 0≤t≤Тс2,
где  ,
,
пропорциональное модулирующему коду M2(t). Это напряжение поступает в процессор 15.
Ответный сигнал (квитанция) формируется так, как описано выше.
Для нахождения свидетелей этого дорожно-транспортного происшествия компьютер 9 (фиг.2), установленный в стационарном пункте 1 контроля, по известным только ему паролям опрашивает навигационные блоки всех транспортных средств и выявляет те из них, которые в это время находились в районе данного дорожно-транспортного происшествия. По координатам положение этих транспортных средств совмещают с цифровой навигационной картой на экране монитора 11.
При выходе из строя световых приборов в любом светофоре навигационный блок по каналу дистанционной связи посылает сообщение соответствующей (ремонтной) службе.
Высокую точность определения положения транспортного средства обеспечивают за счет использования дифференциального метода, при котором спутниковые навигационные приемники 16, имеющиеся в навигационных блоках, установленных в блоке 6 управления светофорами (фиг.1) и стационарном посту 8 (например, посту ГИБДД), служат наземными базовыми станциями с известными координатами. Причем все спутниковые навигационные приемники и блок управления светофорами работают в едином (мировом) времени.
Если транспортное средство нарушило требования правил дорожного движения, например пересекло сплошную линию, превысило скорость движения, остановилось в запрещенном месте (транспортное средство 5 на фиг.1) и т.п., то процессор 15 (фиг.3) вначале звуком, "голосом" и текстом на цифровом табло 17 информирует об этом нарушении водителя, а спустя некоторое время, если нарушение продолжает иметь место, навигационный терминал формирует и по дистанционному каналу связи 14.i передает в стационарный пункт 1 контроля кодированное сообщение об этом нарушении, как это описано выше, которое позволяет визуализировать по координатам на цифровой навигационной карте 12 это транспортное средство.
При пересечении транспортным средством границы региона в энергонезависимой памяти 18 (фиг.3) навигационного блока транспортного средства запоминают время и путь, пройденный этим транспортным средством в его пределах, а также время непрерывного нахождения водителя за рулем.
Если в стационарный пункт 1 контроля поступил сигнал об угоне транспортного средства, то по каналам дистанционной связи 14 (фиг.3) по паролю передают сигнал в блок 19 датчиков и исполнительных устройств навигационного блока этого транспортного средства на его остановку (выключение двигателя).
Со стационарного поста 8 (фиг.1) дистанционно осуществляют выявление транспортного средства с отключенным или неисправным навигационным блоком.
Для выявления транспортного средства с фальшивым государственным номером со стационарного поста 8 по дистанционной связи, входящей в состав навигационного блока, в стационарном пункте 1 контроля запрашивают государственный номер остановленного транспортного средства, который дистанционно опрашивает навигационный блок этого транспортного средства, либо по государственному номеру, либо по его местонахождению (координатам). И, если эти номера не совпадают, то прикрепленный к данному транспортному средству государственный номер ему не принадлежит.
Для выявления транспортного средства с фальшивым государственным номером при неисправности или отключении в этом транспортном средстве навигационного блока могут быть использованы считыватель 23, установленный в навигационном блоке стационарного поста 8, и идентификационная метка, установленная на транспортном средстве на его государственном регистрационном номере.
Считывателем 23 формируется гармоническое колебание
uc(t)=Uc·cos(wct+φс), 0≤t≤Tc,
которое с выхода задающего генератора 24 (фиг.6) через дуплексер 25 поступает в приемопередающую антенну 26, излучается ею в эфир и облучает транспортное средство, которое следует мимо стационарного поста 8 (фиг.5).
Это гармоническое колебание улавливается микрополосковой антенной 30 идентификационной метки, преобразуется встречно-штыревым преобразователем в акустическую волну, которая распространяется по поверхности пьезокристалла 29, отражается от набора 34 отражателей и опять преобразуется в электромагнитный сигнал с фазовой манипуляцией (ФМН)
u4(t)=U4·cos[wct+φк(t)+φс], 0≤t≤Tc,
где φк(t)={0; π} - манипулируемая составляющая фазы, отображающая закон фазовой манипуляции в соответствии с модулирующим кодом M(t).
При этом внутренняя структура сформированного ФМн-сигнала определяется топологией встречно-штыревого преобразователя и содержит уникальную информацию о государственном регистрационном номере транспортного средства.
Сформированный ФМн-сигнал u4(t) излучается микрополосковой антенной 30 в эфир, принимается антенной 26 считывателя 23 и через дуплексер 25 и усилитель 28 мощности поступает на первый (информационный) вход фазового детектора 28, на второй (опорный) вход которого подается напряжение uc(t) задающего генератора 24. На выходе фазового детектора 28 образуется низкочастотное напряжение
uн(t)=Uн·соsφк(t), 0≤t≤Тc,
где  ,
,
пропорциональное модулирующему коду M(t) (государственному регистрационному номеру).
Это напряжение поступает в процессор 15, где сравнивается с набором государственных регистрационных номеров. И, если эти номера не совпадают, то прикрепленный к данному транспортному средству государственный номер ему не принадлежит.
Если транспортное средство не реагирует на облучение, то это означает, что оно имеет фальшивый регистрационный номер, у которого отсутствует идентификационная метка.
Таким образом, предлагаемые способ и устройство по сравнению с прототипами и другими техническими решениями аналогичного назначения обеспечивают повышение эффективности контроля транспортных средств. Это достигается использованием дуплексной радиосвязи, двух частот, сложных сигналов с фазовой манипуляцией и идентификационных меток.
Сложные ФМн-сигналы обладают энергетической и структурной скрытностью.
Энергетическая скрытность сложных ФМн-сигналов обусловлена их высокой сжимаемостью во времени или по спектру при оптимальной обработке, что позволяет снизить мгновенную излучаемую мощность. Вследствие этого, сложный ФМн-сигнал в точке приема может оказаться замаскированным шумами и помехами. Причем энергия сложного ФМн-сигнала отнюдь не мала, она просто распределена по частотно-временной области так, что в каждой точке этой области мощность сигнала меньше мощности шумов и помех.
Структурная скрытность сложных ФМн-сигналов обусловлена большим разнообразием их форм и значительными диапазонами изменения значений параметров, что затрудняет оптимальную или хотя бы квазиоптимальную обработку сложных ФМн-сигналов априорно неизвестной структуры с целью повышения чувствительности приемного устройства.
Основной особенностью идентификационных меток на поверхностных акустических волнах является малые габариты, большой срок службы и отсутствие источников питания.
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ контроля транспортных средств и устройство для его осуществления | 2020 |
|
RU2745459C1 |
| ТЕРРИТОРИАЛЬНАЯ СИСТЕМА КОНТРОЛЯ ТРАНСПОРТИРОВКИ ОСОБО ВАЖНЫХ И ОПАСНЫХ ГРУЗОВ | 2009 |
|
RU2403623C1 |
| СИСТЕМА ОХРАННОЙ СИГНАЛИЗАЦИИ | 2010 |
|
RU2447513C1 |
| ТЕРРИТОРИАЛЬНАЯ СИСТЕМА КОНТРОЛЯ ТРАНСПОРТИРОВКИ ОСОБО ВАЖНЫХ И ОПАСНЫХ ГРУЗОВ | 2011 |
|
RU2462759C1 |
| СПОСОБ КОНТРОЛЯ ЗА ТРАНСПОРТИРОВКОЙ ГРУЗОВ | 2010 |
|
RU2452996C1 |
| ИНФОРМАЦИОННО-УПРАВЛЯЮЩАЯ СИСТЕМА КОНТРОЛЯ НАД УЧАСТНИКАМИ ДОРОЖНОГО ДВИЖЕНИЯ И ПРЕДУПРЕЖДЕНИЯ ВОЗНИКНОВЕНИЯ ЧРЕЗВЫЧАЙНЫХ СИТУАЦИЙ ПРИ ДОРОЖНОМ ДВИЖЕНИИ | 2011 |
|
RU2467399C1 |
| КОМПЬЮТЕРНАЯ СИСТЕМА УПРАВЛЕНИЯ ПОРТОВЫМ КОНТЕЙНЕРНЫМ ТЕРМИНАЛОМ | 2010 |
|
RU2435228C1 |
| ТЕРРИТОРИАЛЬНАЯ СИСТЕМА КОНТРОЛЯ ТРАНСПОРТИРОВКИ ЭКОЛОГИЧЕСКИ ОПАСНЫХ ГРУЗОВ | 2009 |
|
RU2414004C1 |
| СПОСОБ КОНТРОЛЯ ТРАНСПОРТНЫХ СРЕДСТВ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2005 |
|
RU2304813C1 |
| АВТОМАТИЗИРОВАННАЯ СИСТЕМА АВАРИЙНОГО И ЭКОЛОГИЧЕСКОГО МОНИТОРИНГА ОКРУЖАЮЩЕЙ СРЕДЫ РЕГИОНА | 2004 |
|
RU2257598C1 |

Группа изобретений относится к области космической навигации и предназначена для осуществления контроля перемещения и местоположения транспортных средств (ТС), с помощью спутниковой навигационной системы. Технической задачей изобретения является повышение эффективности способа и устройства контроля ТС путем использования дуплексной радиосвязи, двух частот, сложных сигналов с фазовой манипуляцией и идентификационных меток. При реализации контроля используются стационарный пункт контроля, ТС, блок управления светофорами, светофоры и стационарный пост. Стационарный пункт контроля содержит компьютер, блок ввода, монитор с цифровой навигационной картой, средства управления изображениями и блок дистанционной связи. Навигационный блок ТС содержит процессор, спутниковый приемник, цифровое табло, энергонезависимую память, блок датчиков и исполнительных устройств, блок тревожных кнопок и идентификационную метку. Навигационный блок, установленный в блоке управления светофорами, содержит процессор, блок дистанционной связи, спутниковый приемник, энергонезависимую память, блок датчиков и исполнительных устройств, коммутатор и световые приборы светофоров. Навигационный блок, установленный на стационарном посту, содержит блок дистанционной связи, процессор, спутниковый приемник, энергонезависимую память, блок датчиков и исполнительных устройств и считыватель. Считыватель включает в себя задающий генератор, дуплексер, приемопередающую антенну, усилитель мощности и фазовый детектор. Идентификационная метка включает в себя пьезокристалл, микрополосковую антенну, электроды, две шины, набор отражателей. Блок дистанционной связи включает в себя задающий генератор, фазовый манипулятор, формирователь модулирующего кода, два смесителя, два гетеродина, усилитель первой промежуточной частоты, два усилителя мощности, дуплексер, приемопередающую антенну, усилитель второй промежуточной частоты, перемножитель, полосовой фильтр и фазовый детектор. 2 н.п. ф-лы, 10 ил.
1. Способ контроля транспортных средств, при реализации которого размещают стационарный пункт контроля, оснащенный блоком дистанционной связи и связанным с ним компьютером, снабженным блоком ввода в него цифровой навигационной карты местности, монитором с экраном для визуализации цифровой информации, средствами управления изображениями на этом экране и средствами формирования файлов данных, создаваемых в процессе контроля транспортного средства, визуализируют на экране монитора цифровую навигационную карту местности, а само транспортное средство оснащают навигационным блоком, оснащенным спутниковым приемником, блоком дистанционной связи, процессором, энергонезависимой памятью, средством индикации, блоком датчиков и исполнительных устройств и определяющим параметры перемещения транспортного средства во времени, которые с помощью дистанционной связи запрашивают со стационарного пункта контроля и наносят на цифровую навигационную карту местности, при этом в качестве базовой станции с известными координатами используют блок управления светофорами на регулируемом перекрестке, на пешеходном переходе и на стационарном посту, в котором размещают навигационный блок, оснащенный спутниковым приемником, блоком дистанционной связи, процессором, энергонезависимой памятью, блоком датчиков и исполнительных устройств, навигационный блок с помощью блока датчиков и исполнительных устройств соединяют с коммутатором, осуществляющим управление работой светофоров, синхронизируют режимы работы светофоров со спутниковым навигационным приемником, запоминают переключение светофоров во времени в энергонезависимой памяти, а при необходимости изменяют режим работы светофоров со стационарного пункта контроля посредством блока дистанционной связи, выявляют неисправности в работе светофоров и информацию об этих неисправностях передают посредством блока дистанционной связи соответствующей службе, навигационный же блок транспортного средства оснащают блоком тревожных кнопок для вызова специальных служб, а также заносят в него регистрационные данные транспортного средства, его государственный номер и пароль, по которому осуществляют дистанционную связь стационарного пункта контроля с транспортным средством, границу региона, в котором в данное время находится транспортное средство, границы зон действия дорожных знаков и их изменения, а в стационарный пункт контроля передают тревожный сигнал при нарушении транспортным средством требований дорожных знаков, нападении на водителя, угоне или несанкционированном отключении навигационного блока транспортного средства от бортовой сети, а при нарушении его работоспособности включают звуковой сигнал, причем все навигационные блоки и светофоры функционируют в едином времени, диагностируют навигационный блок транспортного средства со стационарного пункта контроля для определения его исправности и соответствия регистрационным параметрам, а местоположение транспортного средства определяют в дифференциальном режиме по отношению к спутниковому навигационному приемнику, установленному в блоке управления светофорами и на стационарном посту, при движении мимо которого транспортного средства у него дистанционно определяют соответствие государственного номера, прикрепленного к транспортному средству, и фактического государственного номера, записанного в навигационном блоке самого транспортного средства, а также выявляют транспортное средство с неработающим навигационным блоком, отличающийся тем, что каждое транспортное средство снабжают идентификационной меткой, которую размещают на государственном регистрационном номере, облучают ее гармоническим колебанием несущей частоты Wс при прохождении транспортного средства мимо стационарного поста, осуществляют прием и преобразование гармонического колебания в акустическую волну, ее распространение по поверхности пьезокристалла, обратное отражение, преобразование в электромагнитный сигнал с фазовой манипуляцией, внутренняя структура которого соответствует структуре встречно-штыревого преобразователя идентификационной метки, которая соответствует государственному регистрационному номеру транспортного средства, излучают его в эфир, принимают на стационарном посту, усиливают по мощности, осуществляют синхронное детектирование с использованием гармонического колебания несущей частоты wc, выделяют низкочастотное напряжение, пропорциональное государственному регистрационному номеру облучаемого транспортного средства, и сравнивают с государственными регистрационными номерами, записанными в памяти стационарного поста, по результатам сравнения принимают решение о принадлежности государственного регистрационного номера данному транспортному средству, в каждом блоке дистанционный связи формируют высокочастотное колебание несущей частоты wc, манипулируют его по фазе модулирующим кодом M1(t) источника дискретных сообщений, сформированный сложный сигнал с фазовой манипуляцией преобразуют по частоте с использованием частоты wг1 первого гетеродина, выделяют напряжение первой промежуточной частоты wup1, равной сумме частот wг1=wc+wг1, усиливают его по мощности, излучают в эфир на частоте w1=wup1, принимают в другом блоке дистанционной связи, усиливают по мощности, преобразуют по частоте с использованием частоты wг1 гетеродина, выделяют напряжение второй промежуточной частоты wup2, равной разности частот wup2=w1-wг1, перемножают с напряжением второго гетеродина с частотой wг2, выделяют напряжение третьей промежуточной частоты wup, равной разности частот wup3=wг2-wup2=wг1, представляющее собой сложный сигнал с фазовой манипуляцией на частоте wг1 первого гетеродина, осуществляют синхронное его детектирование с использованием напряжения первого гетеродина, при этом сложные сигналы с фазовой манипуляцией в блоке дистанционной связи стационарного пункта контроля излучают на частоте w2, а принимают на частоте w1, а сложные сигналы с фазовой манипуляцией в блоке дистанционной связи транспортных средств, стационарного поста и блоков управления светофорами, наоборот, излучают на частоте w1, а принимают на частоте w2, частоты wг1 и wг2 гетеродинов разносят на значение второй промежуточной частоты
wг2-wг1=wup2.
2. Устройство для контроля транспортных средств, содержащее размещенный в стационарном пункте контроля компьютер, соединенный с блоком дистанционной связи и снабженный блоком ввода в него цифровой навигационной карты местности, монитором с экраном для визуализации цифровой информации и средствами управления изображениями на этом экране, а в самом транспортном средстве - навигационный блок, снабженный спутниковым навигационным приемником, блоком дистанционной связи, процессором, энергонезависимой памятью, средством индикации, блоком датчиков и исполнительных устройств, а также размещенные в блоке управления светофорами на регулируемом перекрестке, на пешеходном переходе и на стационарном посту с известными координатами - навигационный блок со спутниковым навигационным приемником, блоком дистанционной связи, процессором, энергонезависимой памятью, блоком датчиков и исполнительных устройств, при этом навигационный блок, установленный в блоке управления светофорами, посредством блока датчиков и исполнительных устройств связан через коммутатор со световыми приборами светофоров с возможностью осуществления их включения в заданном порядке и выявления неисправностей, а в навигационный блок транспортного средства включен блок тревожных кнопок, соединенный с блоком датчиков и исполнительных устройств и предназначенный для вызова специальных служб, отличающееся тем, что навигационный блок стационарного поста снабжен считывателем, связанным с процессором, а каждое транспортное средство снабжено идентификационной меткой, размещенной на государственном регистрационном номере, причем считыватель выполнен в виде последовательно подключенных к процессору задающего генератора, дуплексера, вход-выход которого связан с приемопередающей антенной, усилителя мощности и фазового детектора, второй вход которого соединен с выходом задающего генератора, а выход подключен к процессору, каждая идентификационная метка выполнена в виде пьезокристалла с нанесенным на его поверхность алюминиевым тонкопленочным встречно-штыревым преобразователем, связанным с микрополосковой антенной и набором отражателей, при этом встречно-штыревой преобразователь содержит две гребенчатые системы электродов, электроды каждой из гребенок соединены друг с другом шинами, связанными с микрополосковой антенной, каждый блок дистанционной связи выполнен в виде последовательно включенных задающего генератора, фазового манипулятора, второй вход которого соединен через формирователь модулирующего кода с процессором, первого смесителя, второй вход которого соединен с выходом первого гетеродина, усилителя первой промежуточной частоты, первого усилителя мощности, дуплексера, вход-выход которого связан с приемопередающей антенной, второго усилителя мощности, второго смесителя, второй вход которого соединен с выходом второго гетеродина, усилителя второй промежуточной частоты, перемножителя, второй вход которого соединен с выходом первого гетеродина, полосового фильтра и фазового детектора, второй вход которого соединен с выходом второго гетеродина, а выход является выходом блока дистанционной связи.
| СПОСОБ КОНТРОЛЯ ТРАНСПОРТНЫХ СРЕДСТВ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2005 |
|
RU2304813C1 |
| СПОСОБ КОНТРОЛЯ ЭКСПЛУАТАЦИИ ТРАНСПОРТНЫХ СРЕДСТВ И СИСТЕМА ЕГО ОСУЩЕСТВЛЕНИЯ | 2004 |
|
RU2257616C1 |
| СПОСОБ КОНТРОЛЯ ДВИЖЕНИЯ ТРАНСПОРТНОГО СРЕДСТВА | 2003 |
|
RU2243594C2 |
| СИСТЕМА СБОРА И АНАЛИЗА ДАННЫХ О ДОРОЖНО-ТРАНСПОРТНОМ ПРОИСШЕСТВИИ | 2003 |
|
RU2222830C1 |

