Предлагаемый способ относится к области спутниковой навигации и может быть использован для определения положения мобильных объектов и управления ими.
Известны способы навигации объектов по сигналам глобальных навигационных спутниковых систем (ГНСС) (патенты РФ №№2.15.637, 2.213.979, 2.24.005; патент США №6.662.108; Глобальная спутниковая радионавигационная система ГЛОНАСС. Под ред. В.Н.Харисова. - М.: ИПРЖР, 1998, С.18-27 и другие).
Из известных способов наиболее близким к предлагаемому является «Способ точного позиционирования и мониторинга мобильных объектов (патент РФ №2.248.005, G01S 5/00, 2004), который и выбран в качестве прототипа.
По указанному способу вокруг телецентров образуют зоны из «m» контрольно-корректирующих станций (ККС), где «m» - любое целое число, формирующих по сигналам навигационных космических аппаратов (НКА) локальные дифференциальные поправки, которые по радиоканалу передают в телецентр и, через передатчик телецентра, без нарушения текущего вещания, на мобильный объект, который по сигналам навигационных космических аппаратов с учетом локальных дифференциальных поправок определяет собственные координаты, которые по радиоканалу передаются в телецентр, откуда они передаются в пункт управления движением, при этом сигналы управления движением, формируемые в пункте управления движением, совместно с координатами мобильного объекта передают на ближайший к мобильному объекту диспетчерский пункт по спутниковым каналам связи, где формируются сигналы целеуказания мобильному объекту, которые посредством передатчика соответствующего телецентра адресно передают на мобильный объект.
Недостатками известного способа являются низкая надежность и достоверность обмена дискретными сообщениями между телецентром и мобильными объектами.
Технической задачей изобретения является повышение надежности и достоверности обмена дискретными сообщениями между телецентрами и мобильными объектами путем использования дуплексной радиосвязи на двух частотах ω1, ω2 и сложных сигналов с фазовой манипуляцией.
Поставленная задача решается тем, что способ точного позиционирования и мониторинга мобильных объектов, заключающийся, в соответствии с ближайшим аналогом, в том, что вокруг каждого телецентра образуют зоны из «m» контрольно-корректирующих станций, где m - любое целое число, формирующих по сигналам навигационных космических аппаратов локальные дифференциальные поправки, которые по радиоканалу передают на телецентр и, через передатчик телецентра, без нарушения текущего вещания, на мобильный объект, который по сигналам навигационных космических аппаратов с учетом локальных дифференциальных поправок определяет собственные координаты, которые по радиоканалу передаются на телецентр, откуда они передаются в пункт управления движением, при этом сигналы управления движением, формируемые в пункте управления движением, совместно с координатами мобильного объекта, передают на ближайший к мобильному объекту диспетчерский пункт по спутниковым каналам связи, где формируются сигналы целеуказания мобильному объекту, которые посредством передатчика соответствующего телецентра адресно передают на мобильный объект, отличается от ближайшего аналога тем, что на каждой контрольно-корректирующей станции и мобильном объекте принимают сигналы навигационных космических аппаратов на частоте ωc, преобразуют их по частоте с использованием частоты ωГ1 гетеродина, выделяют напряжение первой промежуточной частоты ωпр1, равной сумме частот ωпр1=ωc+ωГ1=ω1, детектируют их, используют продетектированные сигналы для формирования локальных дифференциальных поправок, которые передают на телецентр на частоте ω2=ωГ1, преобразуют их на телецентре по частоте с использованием частоты ωГ2 гетеродина, выделяют напряжение второй промежуточной частоты ωпр2, равной разности частот ωпр2=ωГ2-ω2, перемножают его с напряжением гетеродина с частотой ωГ2, выделяют напряжение на частоте ωГ1, детектируют его с использованием напряжения гетеродина с частотой ωГ1, формируют гармоническое колебание на частоте ωс, манипулируют его по фазе продетектированным напряжением, формируя сложный сигнал с фазовой манипуляцией, преобразуют его по частоте с использованием частоты ωГ1 гетеродина, выделяют напряжение первой промежуточной частоты ωпр1, равной сумме частот ωпр1=ωc+ωГ1, усиливают его по мощности, излучают в эфир на частоте ω1=ωпр1, принимают на мобильном объекте, преобразуют по частоте с использованием частоты ωГ1 гетеродина, выделяют напряжение второй промежуточной частоты ωпр2, равной разности частот ωпр2=ω1-ωГ1, перемножают его с напряжением гетеродина с частотой ωГ2, выделяют напряжение с частотой ωГ1, детектируют его, определяют собственные координаты с учетом локальных дифференциальных поправок, формируют модулирующий код, соответствующий собственным координатам мобильного объекта, манипулируют им по фазе гармоническое колебание с частотой ωс, формируя тем самым сложный сигнал с фазовой манипуляцией, преобразуют его по частоте с использованием частоты ωГ2 гетеродина, выделяют напряжение третьей промежуточной частоты ωпр3, равной разности частот ωпр3=ωГ2-ωс, усиливают его по мощности и излучают в эфир на частоте ω2=ωпр3, причем частоты ωГ1 и ωГ2 гетеродинов разносят на значение второй промежуточной частоты ωпр2=ωГ2-ωГ1.
Структурная схема системы, реализующей предлагаемый способ, представлена на фиг.1. Частотная диаграмма, иллюстрирующая преобразование сигналов по частоте, показана на фиг.3. Структурная схема аппаратуры телецентра 3 представлена на фиг.4. Структурная схема аппаратуры мобильного объекта 6 представлена на фиг.5. Структурная схема аппаратуры контрольно-корректирующей станции 2 представлена на фиг.2.
Система, реализующая предлагаемый способ, содержит навигационные космические аппараты (НКА) 1, контрольно-корректирующие станции (ККС) 2, телецентры 3, устройства 4 космической связи, диспетчерские пункты 5, мобильный объект 6 и пункт 7 управления движением.
Каждая ККС 2 содержит последовательно включенные приемную антенну 9, усилитель 10 высокой частоты, смеситель 12, второй вход которого соединен с выходом гетеродина 11, усилитель 13 первой промежуточной частоты, первый перемножитель 15, второй вход которого соединен с выходом фильтра 18 нижних частот, узкополосный фильтр 17, второй перемножитель 16, второй вход которого соединен с выходом усилителя 13 первой промежуточной частоты, согласующий блок 19, вход-выход которого связан с компьютером 20, фазовый манипулятор 22, второй вход которого соединен с выходом задающего генератора 21, усилитель 23 мощности и передающую антенну 24.
Аппаратура телецентра 3 содержит последовательно включенные задающий генератор 35, фазовый манипулятор 36, второй вход которого соединен с компьютером 34, смеситель 38, второй вход которого соединен с выходом гетеродина 37, усилитель 39 первой промежуточной частоты, усилитель 40 мощности, дуплексер 26, вход-выход которого связан с приемопередающей антенной 25, усилитель 27 мощности, смеситель 29, второй вход которого соединен с выходом гетеродина 28, усилитель 30 второй промежуточной частоты, перемножитель 31, второй вход которого соединен с выходом гетеродина 28, полосовой фильтр 32, фазовый детектор 33, второй вход которого соединен с выходом гетеродина 37, а выход подключен к компьютеру 34.
Аппаратура мобильного объекта 6 содержит последовательно включенные задающий генератор 53, фазовый манипулятор 54, второй вход которого соединен с компьютером 52, смеситель 56, второй вход которого соединен с выходом гетеродина 55, усилитель 57 третьей промежуточной частоты, усилитель 58 мощности, дуплексер 42, вход-выход которого связан с приемопередающей антенной 41, усилитель 43 мощности, смеситель 45, второй вход которого соединен с первым выходом гетеродина 44, усилитель 46 второй промежуточной частоты, перемножитель 47, второй вход которого соединен с выходом гетеродина 55, полосовой фильтр 48 и фазовый детектор 49, второй вход которого соединен с вторым выходом гетеродина 44, а выход подключен к компьютеру 52.
Способ точного позиционирования и мониторинга мобильных объектов реализуется следующим образом.
Способ базируется на использовании сигналов, излучаемых спутниками 1.i (i=1, 2, …, 24) навигационной системы «Навстар».
Глобальная навигационная система GPS предназначена для передачи навигационных сигналов, которые могут одновременно приниматься во всех регионах мира. Каждый GPS-спутник излучает на двух частотах (1575,42 МГц и 1227,6 МГц) специальный навигационный сигнал в виде бинароного фазоманипулированного (ФМн) сигнала, в котором зашифрованы два вида кода. Один из них - код С/А - доступен широкому кругу гражданских потребителей, в том числе и системе, реализующей предлагаемый способ. Он позволяет получать лишь приблизительную оценку местоположения мобильного объекта, поэтому называется «грубым» кодом. Передача кода С/А осуществляется на частоте ωc=1575,42 МГц с использованием фазовой манипуляции псевдослучайной последовательностью (ПСП) длиной 1023 символа (элементарных посылок). Защита от ошибок обеспечивается с помощью кода Гоулда. Период повторения С/А-кода - 1 мс. Тактовая частота - 1023 МГц.
Другой код - Р - обеспечивает более точное вычисление координат, но пользоваться им способны не все, доступ к нему ограничивается провайдером услуг GPS, используется он военным ведомством США.
В состав системы «Навстар» входят космический сегмент, состоящий из 24 КА, сеть наземных станций слежения за их работой и пользовательский сегмент (навигационные приемники GPS-сигналов).
Сигнал с фазовой манипуляцией (ФМн)
uc(t)=Uccos[ωct+φk1(t)+φc], 0≤t≤Tc,
где Uc, ωс, φc,Тс - амплитуда, несущая частота, начальная фаза и длительность сигнала;
φk1(t)={0,π} - манипулируемая составляющая фазы, отображающая закон фазовой манипуляции в соответствии с ПСП, причем φk(t)=const при kτэ<t<(k+1)τэ и может изменяться скачком при t=kτэ, т.е. на границах между элементарными посылками (k=1, 2, …, N-1);
τэ,N - длительность и количество элементарных посылок, из которых составлен сигнал длительностью Тс(Тс=N·τэ),
излучаемый спутниками 1, улавливается приемной антенной 9 и через усилитель 10 высокой частоты поступает на первый вход смесителя 12, на второй вход которого подается напряжение гетеродина 11
uГ1(t)=UГ1cos(ωГ1t+φГ1).
На выходе смесителя 12 образуются напряжения комбинационных частот. Усилителем 13 выделяется напряжение первой промежуточной (суммарной) частоты
uпр1(t)=Uпр1cos[ωпр1t+φk1(t)+φпр1], 0≤t≤Tc,
где  ,
,
ωпр1=ωc+ωГ1 - первая промежуточная (суммарная) частота;
φпр1=φс+φГ1;
которое одновременно поступает на входы перемножителей 15 и 16. На второй вход перемножителя 16 с выхода узкополосного фильтра 17 подается опорное напряжение
uo(t)=Uocos(ωпр1t+φпр1), 0≤t≤Tc.
В результате перемножения указанных напряжений образуется результирующее напряжение
uΣ(t)=UΣcosφk1(t)+UΣcos[2ωпр1t+φk1(t)2φпр1],
где  .
.
Аналог ПСП
uн1(t)=UΣcosφk1(t)
выделяется фильтром 18 нижних частот и подается на вход блока 19 сопряжения и на второй вход перемножителя 15. На выходе последнего образуется гармоническое колебание
uo(t)=Upcos(ωпр1t+φпр1)+Upcos(ωпр1t+2φk1(t)+φпр1)=2Up(ωпр1t+φпр1)=Uocos(ωпр1t+φпр1).
Данное колебание выделяется узкополосным фильтром 17 и подается на второй перемножитель 16.
Перемножители 15 и 16, узкополосный фильтр 17 и фильтр 18 нижних частот образуют демодулятор 14 ФМн-сигналов.
В данном демодуляторе опорное напряжение, необходимое для синхронного детектирования принимаемого ФМн-сигнала, выделяется непосредственно из самого принимаемого ФМн-сигнала, и в нем отсутствует явление «обратной работы», присущее известным устройствам (Пистолькорса А.А., Сифорова В.И., Костаса В.Ф., Травина Г.А.), выделяющим опорное напряжение из самого принимаемого ФМн-сигнала.
Приемная антенна 9, усилитель 10 высокой частоты, гетеродин 11, смеситель 12, усилитель 13 первой промежуточной частоты и демодулятор 14 образуют приемник 8 GPS-сигналов.
Для определения двух координат места ККС 2 (широты и долготы) необходимы измерения от трех навигационных спутников. Приемник 8 GPS-сигналов обеспечивает определение местоположения ККС 2 с точностью не более 50 м. Для повышения точности определения места ККС 2 применяется метод дифференциальных поправок, основанный на использовании известных координат, полученных в результате прецизионной геодезической съемки. Дифференциальные поправки рассчитываются компьютером 20 и в виде модулирующего кода M1(t) через блок 19 согласования поступают на первый вход фазового манипулятора 22, на второй вход которого подается высокочастотное колебание с выхода задающего генератора 21
u2(t)=U2cos(ω2t+φ2).
На выходе фазового манипулятора 22 образуется ФМн-сигнал
u1(t)=U2cos[ω2t+φk2(t)+φ2], 0≤t≤T1,
который после усиления в усилителе 23 мощности поступает в передающую антенну 24, излучается ею в эфир, улавливается приемопередающей антенной 25 телецентра 3 и через дуплексер 26 и усилитель 27 мощности поступает на первый вход смесителя 29, на второй вход которого подается напряжение гетеродина 28
uГ2(t)=UГ2cos(ωГ2t+φГ2).
На выходе смесителя 29 образуются напряжения комбинационных частот. Усилителем 30 выделяется напряжение второй промежуточной частоты
u4(t)=Uпр2cos[ωпр2t+φk2(t)+φпр2], 0≤t≤T1,
где 
ωпр2=ωГ2-ω2 - вторая промежуточная (разностная) частота;
φпр2=φГ2-φ2,
которое поступает на первый вход перемножителя 31. На второй вход последнего подается напряжение uГ2(t) гетеродина 28. На выходе перемножителя 31 образуется напряжение
u3(t)=U3cos[ωГ1t+φk2(t)+φГ1], 0≤t≤T1,
где 
которое выделяется полосовым фильтром 32 и поступает на первый (информационный) вход фазового детектора 33. На второй (опорный) вход фазового детектора 33 подается напряжение гетеродина 37
uГ1(t)=UГ1cos(ωГ1t+φГ1).
В результате синхронного детектирования на выходе фазового детектора 33 образуется низкочастотное напряжение
uН2(t)=UН2cosφk2(t), 0≤t≤T1,
где 
пропорциональное модулирующему коду M1(t).
Это напряжение через компьютер 34 поступает на второй вход фазового манипулятора 36, на первый вход которого подается гармоническое колебание с выхода задающего генератора 35
uc2(t)=Uc2cos[ωct+φc2), 0≤t≤T2.
На выходе фазового манипулятора 36 формируется ФМн-сигнал
u4(t)=Uc2cos[ωct+φk3(t)+φc2], 0≤t≤T2,
который поступает на первый вход смесителя 38. На второй вход последнего подается напряжение гетеродина 37
uГ1(t)=UГ1cos(ωпt+φГ1).
На выходе смесителя 38 образуются напряжения комбинационных частот. Усилителем 39 выделяется напряжение первой промежуточной (суммарной) частоты
uпр3(t)=Uпр3cos[ωпр1t+φk3(t)+φпр3],
где 
ωпр1=ωс+ωГ1 - первая промежуточная (суммарная) частота;
φпр3=φс2+φГ1,
которая после усиления в усилителе 40 мощности через дуплексер 26 поступает в приемопередающую антенну 25, излучается ею в эфир на частоте ω1=ωпр1, улавливается приемопередающей антенной 41 мобильного объекта 6 и через дуплексер 42 и усилитель 43 мощности поступает на первый вход смесителя 45. На второй вход смесителя 45 подается напряжение UГ1(t) гетеродина 44. На выходе смесителя 45 образуются напряжения комбинационных частот. Усилителем 46 выделяется напряжение второй промежуточной (разностной) частоты
uпр4(t)=Uпр4cos[ωпр2t+φk3(t)+φпр4],
где 
ωпр2=ω1-ωг1 - вторая промежуточная (разностная) частота;
φпр4=φпр3-φГ1,
которое поступает на первый вход перемножителя 47. На второй вход последнего подается напряжение u2(t) гетеродина 55. На выходе перемножителя 47 образуется напряжение
u5(t)=U5cos[ωГ1t-φk3(t)+φГ1],
где 
ωГ1=ωГ2-ωпр2;
φГ1=φГ2-φпр4,
которое выделяется полосовым фильтром 48 и поступает на первый (информационный) вход фазового детектора 49. На второй (опорный) вход фазового детектора 49 подается напряжение uг1(t) гетеродина 44. В результате синхронного детектирования на выходе фазового детектора 49 образуется низкочастотное напряжение
uн3(t)=Uн3cosφk3(t),
где 
пропорциональное дифференциальным поправкам. Это напряжение поступает в компьютер 52.
Приемником 51 с антенной 50 принимаются GPS-сигналы и используются совместно с дифференциальными поправками для точного определения местоположения мобильного объекта 6 в компьютере 52. Принцип построения и работы приемника 51 аналогичен принципу построения и работы приемника 8, расположенного на ККС 2.
Определив местоположение, мобильный объект передает информацию о своих координатах по радиоканалу на телецентр 3, откуда она поступает в пункт 7 управления движением. Для этого на мобильном объекте 6 с помощью задающего генератора 53 формируется высокочастотное колебание
uc3(t)=Uc3cos(ωct+φc3), 0≤t≤T3,
которое поступает на первый вход фазового манипулятора 54, на второй вход которого подается модулирующий код M3(t), пропорциональный точным координатам мобильного объекта 6. На выходе фазового манипулятора 54 формируется сложный сигнал с фазовой манипуляцией (ФМн)
u6(t)=Uc3cos[ωct+φk4(t)+φc3], 0≤t≤T3,
который поступает на первый вход смесителя 56, на второй вход которого подается напряжение UГ2(t) гетеродина 55. На выходе смесителя 56 образуются напряжения комбинационных частот. Усилителем 57 выделяется напряжение третьей промежуточной (разностной) частоты
uпр5(t)=Uпр5cos[ωпр3t-φk4(t)+φпр5], 0≤t≤T3,
где 
ωпр3=ωГ2-ωс третья промежуточная (разностная) частота;
φпр5=φГ2-φс3,
которое после усиления в усилителе 58 мощности через дуплексер 42 поступает в приемопередающую антенну 41, излучается ею в эфир на частоте ω2=ωпр3, улавливается приемопередающей антенной 25 телецентра 3 и через дуплексер 26 и усилитель 27 мощности поступает на первый вход смесителя 29. Далее указанный сигнал обрабатывается так, как это описано выше. При этом информация о местоположении мобильного объекта 6 из компьютера 34 поступает в пункт 7 управления движением, который формирует стратегическую информацию по управлению мобильным объектом, указывая, например, в какую точку ему нужно переместиться. Эта информация, совместно с координатами мобильного объекта, по каналам космической связи (через устройство космической связи 4) поступает на ближайший к мобильному объекту 6 диспетчерский пункт 5, который формирует тактическую информацию по управлению мобильным объектом 6 (привязка к местности, дороги и т.д.). Данная информация передается через передатчик местного телецентра адресно мобильному объекту 6, как это описано выше.
Использование телецентров 3 (вышек антенн) позволяет охватить значительную территорию, на которой возможно позиционирование и мониторинг мобильных объектов 6 без создания новых систем, поскольку структура телецентров без каких-либо значительных доработок позволяет реализовать указанные действия.
Таким образом, предлагаемый способ по сравнению с прототипом обеспечивает повышение надежности и достоверности обмена дискретными сообщениями между телецентрами и мобильными объектами. Это достигается использованием дуплексной радиосвязи на двух частотах ω1 и ω2 и сложных сигналов с фазовой манипуляцией. При этом частоты ω1 и ω2 выбираются равными: ω1=ωпр1=ωr2, ω2=ωпр3=ωr1 и разнесены между собой на значение второй промежуточной частоты: ωг2-ωг1=ω1-ω2=ωпр2.
Сложные ФМн-сигналы обладают высокой помехоустойчивостью, энергетической и структурной скрытностью.
Энергетическая скрытность данных сигналов обусловлена их высокой сжимаемостью во времени или по спектру при оптимальной обработке, что позволяет снизить мгновенную излучаемую мощность. Вследствие этого сложный ФМн-сигнал в точке приема может оказаться замаскированным шумами и помехами. Причем энергия сложного ФМн-сигнала отнюдь не мала, она просто распределена по частотно-временной области так, что в каждой точке этой области мощность сигнала меньше мощности шумов и помех.
Структурная скрытность сложных ФМн-сигналов обусловлена большим разнообразием их форм и значительными диапазонами изменения значений параметров, что затрудняет оптимальную или хотя бы квазиоптимальную обработку сложных ФМн-сигналов априорно неизвестной структуры.
Кроме того, указанные сигналы позволяют принимать эффективный вид селекции - структурную селекцию.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ПРЕДОТВРАЩЕНИЯ НЕСАНКЦИОНИРОВАННОГО ИСПОЛЬЗОВАНИЯ ЛЕТАТЕЛЬНЫХ АППАРАТОВ | 2010 |
|
RU2446481C2 |
| ЭЛЕКТРОННЫЕ ШАХМАТНЫЕ ЧАСЫ | 2013 |
|
RU2527662C1 |
| ТЕРРИТОРИАЛЬНАЯ СИСТЕМА КОНТРОЛЯ ДВИЖЕНИЯ СПЕЦИАЛЬНЫХ ТРАНСПОРТНЫХ СРЕДСТВ | 2014 |
|
RU2582502C2 |
| ЗАПРОСНЫЙ СПОСОБ ИЗМЕРЕНИЯ РАДИАЛЬНОЙ СКОРОСТИ И СИСТЕМА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2006 |
|
RU2309431C1 |
| АВТОМАТИЧЕСКИЙ БЕСПИЛОТНЫЙ ДИАГНОСТИЧЕСКИЙ КОМПЛЕКС | 2011 |
|
RU2464592C1 |
| УГЛОМЕСТНО-ВРЕМЕННОЙ ДОПЛЕРОВСКИЙ СПОСОБ ОПРЕДЕЛЕНИЯ КООРДИНАТ АВАРИЙНОГО ОБЪЕКТА | 2006 |
|
RU2302645C1 |
| ЗАПРОСНЫЙ СПОСОБ ИЗМЕРЕНИЯ РАДИАЛЬНОЙ СКОРОСТИ | 2009 |
|
RU2429503C2 |
| ЗАПРОСНЫЙ СПОСОБ ИЗМЕРЕНИЯ РАДИАЛЬНОЙ СКОРОСТИ И СИСТЕМА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2008 |
|
RU2389040C1 |
| СИСТЕМА ДИСТАНЦИОННОГО КОНТРОЛЯ И УПРАВЛЕНИЯ РАКЕТНО-КОСМИЧЕСКИМ КОМПЛЕКСОМ НА СТАРТОВОЙ ПОЗИЦИИ | 2010 |
|
RU2427508C1 |
| УСТРОЙСТВО ДЛЯ ДИСТАНЦИОННОГО НАБЛЮДЕНИЯ ЗА СОСТОЯНИЕМ БОЛЬНЫХ | 2008 |
|
RU2376929C1 |
Предлагаемый способ относится к области спутниковой навигации и может быть использован для определения положения мобильных объектов и управления ими. Достигаемым техническим результатом является повышение надежности и достоверности обмена дискретными сообщениями между телецентрами и мобильными объектами путем использования дуплексной радиосвязи на двух частотах ω1 и ω2 и сложных сигналов с фазовой манипуляцией (ФМн). Система, реализующая способ, содержит навигационные космические аппараты (НКА), контрольно-корректирующие станции (ККС), аппаратуру телецентров, устройства космической связи, диспетчерские пункты, аппаратуру мобильного объекта и пункт управления движением, выполненные и соединенные между собой определенным образом. 5 ил.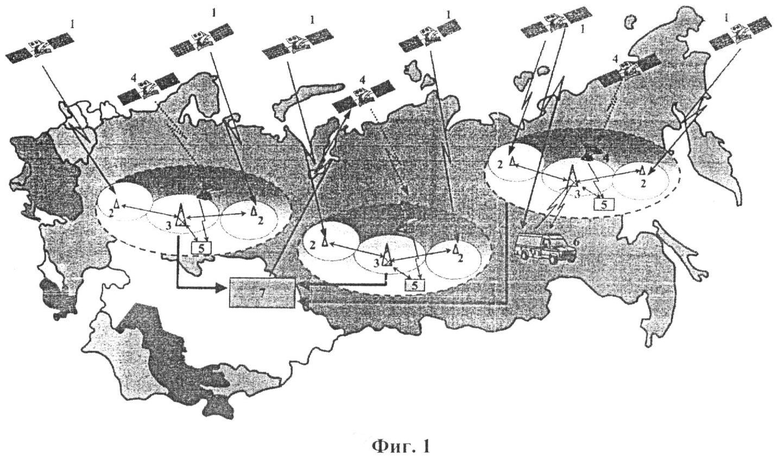
Способ точного позиционирования и мониторинга мобильных объектов, заключающийся в том, что вокруг каждого телецентра образуют зоны из «m» контрольно-корректирующих станций, где m - любое целое число, формирующих по сигналам навигационных космических аппаратов локальные дифференциальные поправки, которые по радиоканалу передают на телецентр и, через передатчик телецентра, без нарушения текущего вещания, на мобильный объект, который по сигналам навигационных космических аппаратов с учетом локальных дифференциальных поправок определяет собственные координаты, которые по радиоканалу передаются на телецентр, откуда они передаются в пункт управления движением, при этом сигналы управления движением, формируемые в пункте управления движением, совместно с координатами мобильного объекта передают на ближайший к мобильному объекту диспетчерский пункт по спутниковым каналам связи, где формируются сигналы целеуказания мобильному объекту, которые посредством передатчика соответствующего телецентра адресно передают на мобильный объект, отличающийся тем, что на каждой контрольно-корректирующей станции и мобильном объекте принимают сигналы навигационных космических аппаратов на частоте ωс, преобразуют их по частоте с использованием частоты ωг1 гетеродина, выделяют напряжение первой промежуточной частоты ωпр1, равной сумме частот ωпр1=ωс+ωг1=ω1 детектируют их, используют продетектированные сигналы для формирования локальных дифференциальных поправок, которые передают на телецентр на частоте ω2=ωг1, преобразуют их на телецентре по частоте с использованием частоты ωг2 гетеродина, выделяют напряжение второй промежуточной частоты ωпр2, равной разности частот ωпр2=ωг2-ω2, перемножают его с напряжением гетеродина с частотой ωг2, выделяют напряжение на частоте ωг1, детектируют его с использованием напряжения гетеродина с частотой ωг1, формируют гармоническое колебание на частоте ωс, манипулируют его по фазе продетектированным напряжением, формируя сложный сигнал с фазовой манипуляцией, преобразуют его по частоте с использованием частоты ωг1 гетеродина, выделяют напряжение первой промежуточной частоты ωпр1, равной сумме частот ωпр1=ωс-ωг1, усиливают его по мощности, излучают в эфир на частоте ω1=ωпр1, принимают на мобильном объекте, преобразуют его по частоте с использованием частоты ωг1 гетеродина, выделяют напряжение второй промежуточной частоты ωпр2, равной разности частот ωпр2=ω1=ωг1, перемножают его с напряжением гетеродина с частотой ωг2, выделяют напряжение с частотой ωг1 детектируют его, определяют собственные координаты с учетом локальных дифференциальных поправок, формируют модулирующий код, соответствующий собственным координатам мобильного объекта, манипулируют им по фазе гармоническое колебание с частотой
ωс, формируя тем самым сложный сигнал с фазовой манипуляцией, преобразуют его по частоте с использованием частоты ωг2 гетеродина, выделяют напряжение третьей промежуточной частоты ωпр3, равной разности частот ωпр3=ωг2-ωс, усиливают его по мощности и излучают в эфир на частоте ω2=ωпр3, усиливают приемопередающей антенной соответствующего телецентра, обеспечивая достоверность обмена дискретными сообщениями между соответствующими телецентрами и мобильными объектами, причем частоты ωг1 и ωг2 гетеродинов разносят на значение второй промежуточной частоты ωпp2=ωг2-ωг1.
| СПОСОБ ТОЧНОГО ПОЗИЦИОНИРОВАНИЯ И МОНИТОРИНГА МОБИЛЬНЫХ ОБЪЕКТОВ | 2004 |
|
RU2248005C1 |
| ГЛОБАЛЬНАЯ ИНТЕГРИРОВАННАЯ СПУТНИКОВАЯ НАВИГАЦИОННО-КОМАНДНО-ТЕЛЕМЕТРИЧЕСКАЯ СИСТЕМА | 2005 |
|
RU2304843C2 |
| СИСТЕМА МОНИТОРИНГА КООРДИНАТ И КОНТРОЛЯ ПОДВИЖНЫХ ОБЪЕКТОВ | 2003 |
|
RU2237925C1 |
| Тахометр | 1933 |
|
SU35444A1 |
| УГЛОМЕСТНО-ВРЕМЕННОЙ ДОПЛЕРОВСКИЙ СПОСОБ ОПРЕДЕЛЕНИЯ КООРДИНАТ АВАРИЙНОГО ОБЪЕКТА | 2006 |
|
RU2302645C1 |
| US 6138074 A, 24.10.2000 | |||
| US 5931889 A, 03.08.1999 | |||
| КАНАЛЬНОЕ КОДИРОВАНИЕ НА ОСНОВЕ КОМПЛЕКСНОГО ПРЕОБРАЗОВАНИЯ С ЧАСТОТНЫМ КОДИРОВАНИЕМ С РАСШИРЕННОЙ ПОЛОСОЙ | 2007 |
|
RU2555221C2 |

