Настоящее изобретение относится к способу детектирования колеса транспортного средства посредством испускания электромагнитного измерительного луча, имеющего известное изменение частоты по времени, из детекторного блока, записи частот измерительного луча, отраженного на детекторный блок, по времени относительно известного изменения частоты по времени в качестве принимаемого сигнала и детектирования изменения заданного вида в принимаемом сигнале в качестве колеса.
Детектирование колес транспортных средств представляет собой интерес во многих областях применения. Например, детектирование колес позволяет достоверно определять движение транспорта на конкретной проезжей части, например, для пограничного контроля или для включения определенных функций, таких как сигнала тревоги, освещения, открытия шлагбаума, регистрации фотографии транспортного средства с целью контроля и т.д. Современные системы взимания платы за проезд также часто работают по принципу определения количества осей проехавших транспортных средств, вследствие чего детектирование колес (осей колес) также может представлять собой важную основу для введения или контроля платы за проезд, в частности, с помощью мобильных контрольных транспортных средств, определяющих количество осей транспортных средств, на которые должна быть наложена плата за проезд при их прохождении мимо или во встречном транспортном потоке.
В патенте DE 10 2008 037 233 А1 раскрывается способ детектирования колес движущегося транспортного средства, основанный на различии горизонтальной составляющей тангенциальной скорости данного транспортного средства по сравнению с его остальными частями; данная тангенциальная составляющая скорости вызывает соответствующий допплеровский сдвиг частоты радиолокационного измерительного луча. Для этого используется радиолокационный спидометр, который облучает нижнюю часть проходящих транспортных средств радиолокационным лепестком и усредняет по времени единый сигнал измерения скорости на основании полученной обратно комбинации частот; данный сигнал показывает максимумы сигнала в местах расположения колес, детектирование которых производится.
Заявитель настоящей заявки раскрыл новые и надежные способы детектирования колес, отличающиеся надежностью и особо низкой чувствительностью к погрешностям, основанным на допплеровских измерениях в ранее неопубликованных патентных заявках ЕР 11 450 079.6, ЕР 11 450 080.4 и РСТ/ЕР 2012/061645.
Заявителем было установлено, что для дальнейшего повышения надежности детектирования подходящим средством является обработка принимаемого сигнала таким образом, чтобы подавлять ложный отраженный сигнал измерительного луча и тем самым повышать эффективность процесса оценки сигнала.
Целью настоящего изобретения является решение указанных выше проблем и создание усовершенствованного способа детектирования колес, основанного на допплеровских измерениях.
Указанная цель достигается согласно настоящему изобретению с помощью способа детектирования колеса транспортного средства посредством испускания электромагнитного измерительного луча с известной прогрессией частоты в зависимости от времени из детекторного блока, регистрирующего частоты измерительного луча, отраженного на детекторный блок по времени относительно известной прогрессии частоты по времени в качестве принимаемого сигнала, и детектирования изменений определенного типа в принимаемом сигнале как колеса,
в котором транспортное средство содержит бортовое устройство, способное устанавливать радиосвязь с приемопередатчиком детекторного блока и сохранять информацию, указывающую, по меньшей мере, косвенно на длину транспортного средства; указанный способ предусматривает:
считывание информации из бортового устройства посредством радиосвязи и с помощью измерения скорости транспортного средства;
вычисление продолжительности прохождения транспортного средства мимо детекторного блока на основе вышеуказанной информации и скорости;
определение временного интервала в принимаемом сигнале, в течение которого принимаемый сигнал является приблизительно постоянным;
определение паразитной составляющей сигнала в сегменте принимаемого сигнала, непосредственно предшествующем данному временному интервалу; и
компенсацию принимаемого сигнала во временном интервале перед выполнением вышеупомянутого детектирования колеса.
С целью решения вышеупомянутых проблем, данное изобретение основано на использовании так называемых бортовых устройств (встроенных систем считывания, OBU), применяемых в системах оплаты за проезд и системах передачи информации для взимания оплаты за проезд транспортного средства по проезжей части. Бортовые устройства данного типа могут устанавливать радиосвязь типа специализированной радиосвязи ближнего действия (DSRC) с придорожными маяками (устройствами, RSE), установленными в определенных известных местах трассы, за счет чего их местоположение можно определить в каждом случае по диапазону дальности радиосвязи придорожного радиомаяка, при нормально работающей специализированной радиосвязи ближнего действия. Примерами подобных базирующихся на радиомаяках и связанных с инфраструктурой систем взимания платы за проезд являются системы, выполненные в соответствии со стандартами CEN-DSRC или ITS-WAVE (IEEE 802.11g). Однако бортовые устройства спутниковых "безмаячковых" систем взимания платы за проезд, самостоятельно определяющие свое местоположение в глобальной навигационной спутниковой системе (ГЛОНАСС) и передающие данные о местоположении (или данные по оплате за проезд, генерированные на их основе) в операционный блок с помощью сети мобильной радиосвязи, также могут быть дополнительно оборудованы радиомодулями DSRC, либо с целью контроля считывания, либо для создания так называемых "гибридных OBU", способных взаимодействовать как с ГЛОНАСС, так и с DSRC-системами.
В способе согласно настоящему изобретению используется способность радиосвязи бортовых устройств с целью использования радиосвязи при прохождении детекторного блока для получения информации по длине транспортного средства и получаемого на основе этой информации интервала времени прохождения, который можно использовать с принимаемом сигнале для подавления ложных сигналов, вызванных, например, отражениями измерительного луча от проезжей части или ложными отражениями измерительного сигнала в результате повторного отражения измерительного сигнала от проезжей части. В результате можно получить точное и правильное детектирование колеса, устойчивое к воздействию помех.
Информация, сохраненная в бортовом устройстве, может либо непосредственно указывать на длину транспортного средства, либо косвенно показывать количество осей, тип и/или вес транспортного средства; на основании данной информации, например, с помощью заложенных таблиц соответствия, можно определить приблизительную длину транспортного средства.
Считывание информации, согласно настоящему изобретению, прямо или косвенно указывающей на длину транспортного средства, с помощью бортового устройства, обладает преимуществом по сравнению с локальным измерением длины транспортного средства во время его прохождения с помощью соответствующего лазера, радиолокатора или ультразвуковых датчиков, поскольку погрешности измерений, которые могут возникать в последнем случае, например, вследствие наличия окон в автобусах, погрузочных поверхностей грузовиков и т.п., устраняются при использовании предлагаемого способа детектирования колес.
Скорость транспортного средства может быть измерена в различными способами, например с помощью лазера спидометр, световой защиты, контуров обнаружения в дорожном покрытии, камер и т.д. Скорость транспортного средства предпочтительно определяют посредством измерения допплеровского сдвига частоты на основе радиосвязи между бортовым устройством и приемопередатчиком, в частности, с помощью радиосвязи, используемой для считывания вышеупомянутой информации. Таким образом, радиосвязь с бортовыми устройствами можно использовать для получения информации как по длине транспортного средства, так и его скорости, и с помощью этих данных можно вычислить интервал времени прохождения транспортного средства.
Согласно возможному усовершенствованному варианту осуществления изобретения, принимаемый сигнал можно компенсировать по частотным компонентам, вызванным скоростью транспортного средства перед тем, как колесо будет обнаружено, что еще больше повышает надежность детектирования.
По той же причине это особенно выгодно для выявления одного из описанных выше изменений принимаемого сигнала, как только присутствия колеса, если данное изменение происходит в течение заданного временного интервала, так что ошибочные обнаружения, причинами которых могут быть, например, отраженные сигналы измерительного луча вне данного временного интервала, предотвращаются.
После этого колеса, детектированные в течение одного и того же временного интервала, предпочтительно, ассоциируются с одним и тем же транспортным средством. Количество колес транспортного средства может использоваться в качестве основы в системе взимания платы за проезд, зависящей, например, от количества осей.
В другом варианте осуществления способа детектирования, предлагаемого настоящим изобретением, принимаемый сигнал сравнивается с паразитной составляющей сигнала в сегменте, следующим непосредственно за данным временным интервалом, и на этой основе обнаруживается наличие прицепа транспортного средства. Наличие прицепа транспортного средства может служить основой системы взимания платы за проезд, зависящей, например, от присутствия прицепа.
Согласно еще одному выгодному варианту осуществления настоящего изобретения, на первом этапе измеряют длину транспортного средства или его параметр, непосредственно характеризующий длину, с помощью стационарного или мобильного контрольного устройства, на основе длины формируют вышеупомянутую информацию, которую сохраняют в бортовом устройстве с помощью радиосвязи. В качестве контрольного устройства, измеряющего эти параметры, может использоваться один из географически разнесенных придорожных радиомаяков (RSEs) радиомаячной системы оплаты проезда, например, и данное измерение может производиться в специально оборудованных радиомаяках данной системы. Например, радиомаяк может измерять длину транспортного средства с помощью лазерного сканирующего устройства, фотокамеры, светового барьера и аналогичных устройств. В качестве альтернативы, измеряемым параметром транспортного средства может быть количество мостов, тип и/или вес транспортного средства, которые также могут измеряться соответствующими сканерами, световыми барьерами, фотокамерами, весами или аналогичными устройствами.
Предлагаемый настоящим изобретением способ детектирования подходит для любого типа измерительного луча, в котором имеет место связанное с эффектом Допплера смещение частоты, при отражении движущейся целью, например, вращающимся колесом или аналогичным предметом. В качестве измерительного луча может использоваться, например, лазерный или ультразвуковой луч. Предпочтительно, в качестве измерительного луча следует использовать луч радиолокатора, излучаемый направленной антенной, предпочтительно, в частотном диапазоне выше 70 ГГц, который можно соответствующим образом сфокусировать и направить.
Способ согласно настоящему изобретению подходит для комбинации с любым возможным вариантом способов детектирования колес, основанных на оценке по времени допплеровского смещения частоты измерительного луча. Предпочтительные варианты осуществления изобретения отличаются тем, что указанное выше изменение определенного типа представляет собой скачок, повышение, снижение или широкополосный спектр принимаемого сигнала выше определенного порогового значения; возможны также комбинации данных вариантов.
Способ детектирования согласно настоящему изобретению подходит как для стационарных, так и для мобильных детекторных устройств. Предпочтительно, детекторный блок крепится на контролирующем транспортном средстве с тем, чтобы предлагаемый настоящим изобретением способ можно было использовать, например, для контроля транспортных средств встречного транспортного потока или транспортных средств, движущихся по соседним полосам в том же направлении, и для детектирования колес данных транспортных средств.
Способ детектирования согласно настоящему изобретению также подходит для любого типа устройств радиосвязи, которые могут быть смонтированы на вышеупомянутых бортовых устройствах, а также, например, для мобильной радиосвязи в глобальных сетях мобильной радиосвязи. Однако, что касается радиосвязи, маячковые системы взимания платы за проезд согласно стандартам CEN-DSRC or ITS-WAVE являются предпочтительными.
Ниже будет приведено подробное описание предпочтительных вариантов осуществления настоящего изобретения со ссылками на чертежи. Приведенные чертежи:
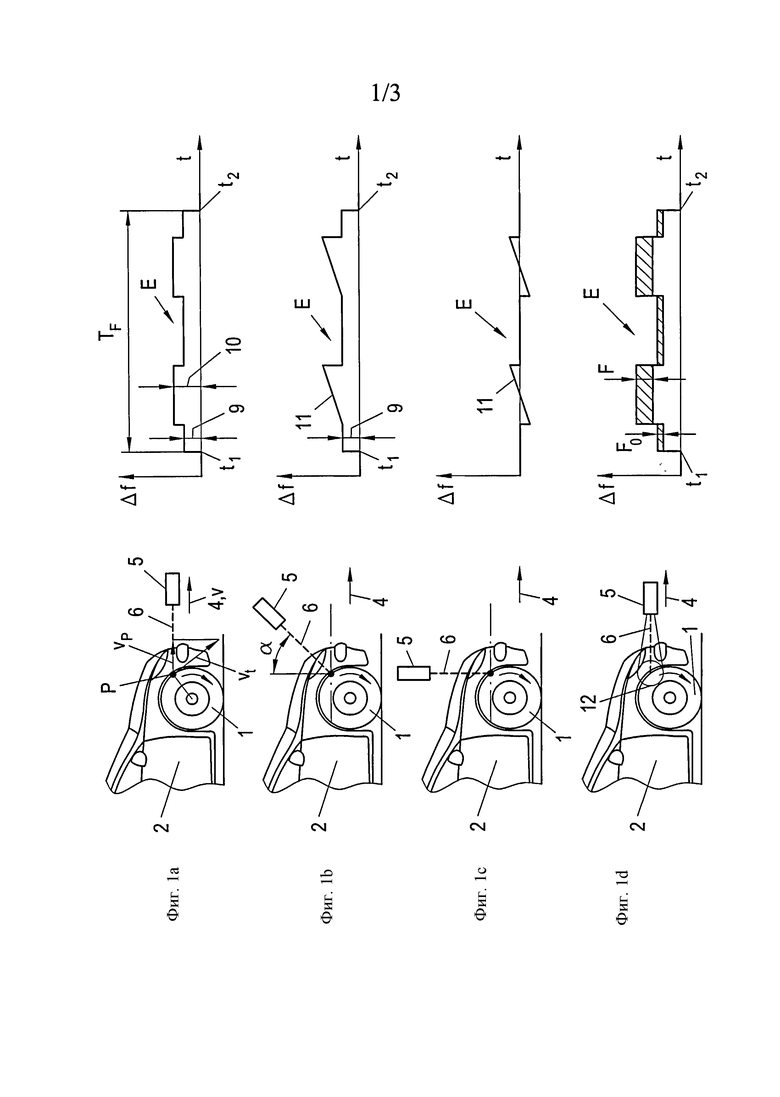
фиг.1a-1d - примерное теоретическое изменение по времени допплеровского сдвига как принимаемого сигнала при различных угловых положениях допплеровского измерительного луча относительно колеса;
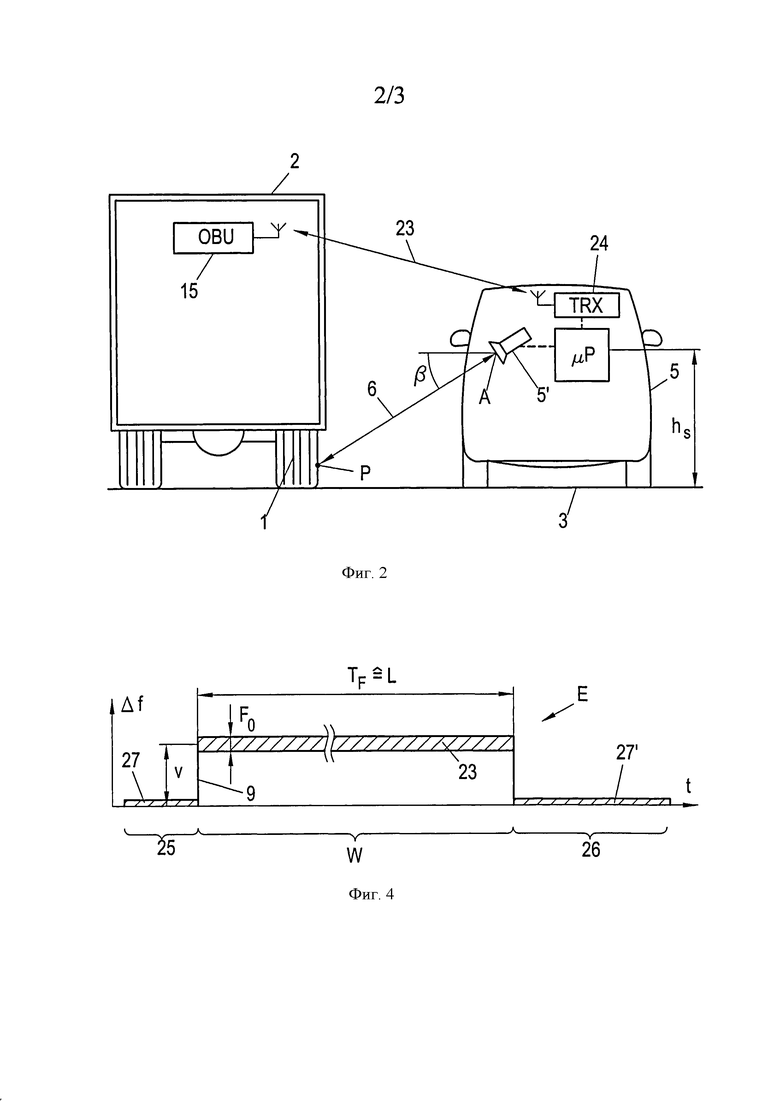
фиг.2 - предлагаемый настоящим изобретением способ, основанный на примерном пути прохождения луча между детекторным блоком, выполненным в форме контролирующего транспортного средства и контролируемым транспортным средством, при взгляде в направлении движения;
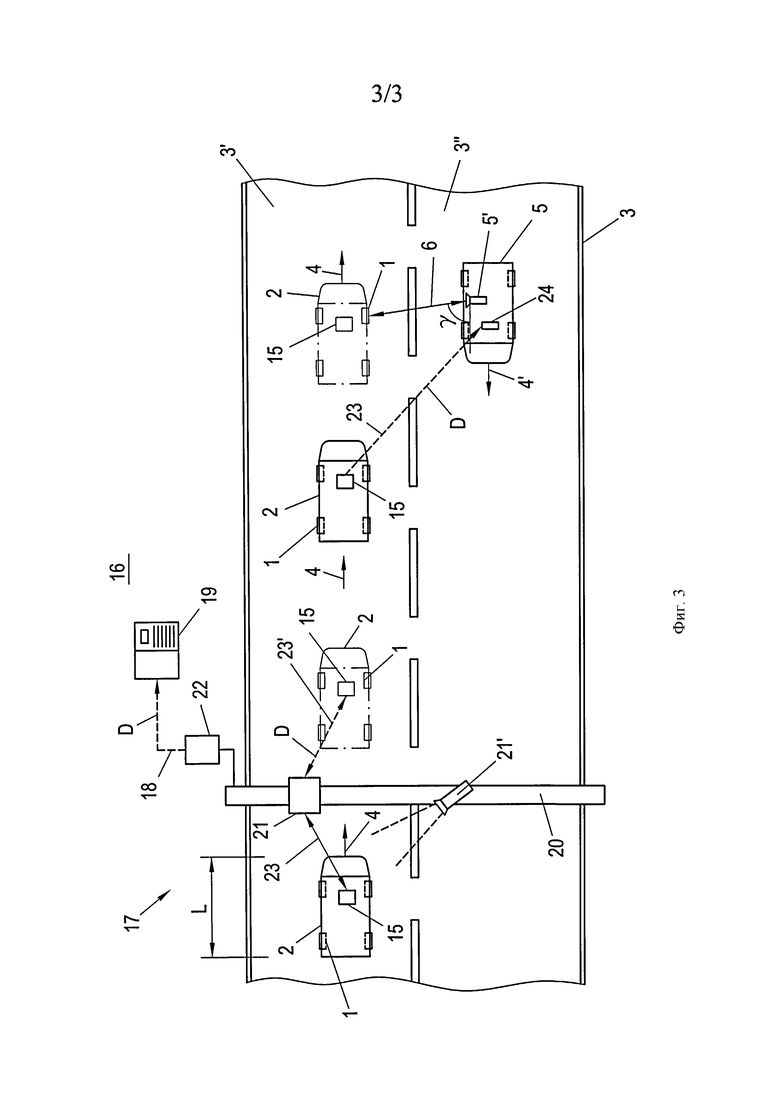
фиг.3 - различные варианты способа детектирования согласно настоящему изобретению; представлен схематический вид сверху на участок проезжей части, содержащий стационарное контрольное устройство, детекторный блок, выполненный в виде контролирующего транспортного средства, и контролируемое транспортное средство, в последовательных фазах данного способа; и
фиг.4 - определение временного интервала и паразитной составляющей принимаемого сигнала до и после временного интервала в виде частотно-временной зависимости.
Фиг.1-3 демонстрируют принцип детектирования вращающегося колеса 1 транспортного средства 2, движущегося по трассе 3, точнее, по полосе 3’ данной трассы, в направлении движения 4. Способ детектирования колес реализуется с помощью детекторного блока 5, который в показанном примере осуществления изобретения является мобильным и выполнен в виде контролирующего транспортного средства. Детекторный блок или контролирующее транспортное средство 5 двигается по второй полосе 3’’ трассы 3 в направлении движения 4’, например, которое предпочтительно (но не обязательно) является встречно-параллельным относительно направления движения 4 транспортного средства 2, контроль которого предполагается выполнять. Разумеется, детекторный блок 5 также может быть стационарным, например, он может быть установлен на обочине трассы 3 или полосы движения 3’.
Детекторный блок 5 излучает измерительный луч 6, например, ультразвуковой, луч лазерного локатора или, предпочтительно, радиолокационный измерительный луч, направленный в сторону транспортного средства 2 или его колес 1, при прохождении мимо данного транспортного средства, с целью детектирования колес 1. Как показано на фиг.1a-1d (вид сбоку), измерительный луч 6 может быть направлен на колесо 1 спереди (фиг.1а), наискосок спереди и сверху (фиг.1b), сверху (фиг.1с) или в любом другом направлении в плоскости чертежа фиг.1 под углом α к вертикали. Как показано на фиг.2, измерительный луч 6, при взгляде в направлении движения 4, может испускаться детекторным блоком 5 под разными углами β относительно горизонтали, например, антенной 5’ в положении излучения А на определенной высоте hs над полотном трассы 3. В качестве альтернативы или дополнительно, измерительный луч 6 также может испускаться из различных положений излучения под разными углами и на различной высоте. Вид сверху на фиг.3 показывает, что измерительный луч 6 может быть направлен под различными углами γ относительно направления движения 4 (или 4’), например, может быть направлен наискосок вперед от детекторного блока 5.
Детекторный блок 5 представляет собой допплеровский детектор и, как известно из предыдущего уровня развития, он оценивает полученную частоту измерительного луча 6, отраженного от транспортного средства 2 или от его колес 1, причем связанный с эффектом Допплера сдвиг частоты Δf между излучаемым и отраженным измерительными лучами 6 можно использовать для определения компонента vp, как расположенного (выдающегося) в направлении измерительного луча 6, относительной скорости v транспортного средства 2, или тангенциальной скорости vt колеса 1, как соответствующей точки Р области соударения измерительного луча 6. С правой стороны на фиг.1a-1d представлены графики изменения по времени t вышеупомянутого связанного с эффектом Допплера частотного сдвига, короче говоря, допплеровского сдвига, Δf и далее он также называется "принимаемым сигналом" Е детекторного блока 5.
Если измерительный луч 6 испускается в направлении параллельно плоскости трассы 3 (α=90°, β=0°, γ≠90°), мы получаем принимаемый сигнал Е, представленный на фиг.1а, характеризующийся внезапным возрастанием 9 в момент встречи измерительного луча 6 с кузовом 2 транспортного средства 2, перемещающегося со скоростью v, и дополнительным скачком 10 в момент прохождения лучом колеса 1. Если измерительный луч 6 падает на колесо 1 или на транспортное средство 2 немного наискосок сверху (0<α<90°, 0<β<90°, 0<γ<180°), полученный принимаемый сигнал Е, показанный на фиг.1b, демонстрирует возрастание (или снижение, в зависимости от направления просмотра и прохождения) 11 при встрече с колесом 1. При испускании луча наклонно сверху с α=0°, 0<β≤90° и γ=90° имеют место повышения (или снижения, в зависимости от направления взгляда) сигнала, показанные на фиг.1с, скорректированные по скорости v транспортного средства 2.
Как показано на фиг.1d, в случае, если измерительный луч 6 расширяется и его поперечное сечение ощутимо увеличивается и более не имеет идеальной точкообразной формы в месте встречи 12 с колесом 1 или транспортным средством 2, всегда имеет место наложение отличающихся (тангенциальных) скоростей или проецированных скоростей vp, обусловленных наличием различных точек Р в области падения 12 луча, что при прохождении лучом колеса 1 приводит к получаемой комбинации частот, которая является, так сказать, фрагментацией или распределением F допплеровского сдвига по времени или принимаемого сигнала Е, которое больше спектрального уширения F0, имеющего место при прохождении лучом только корпуса транспортного средства 2. Такой уширенный спектр F также может использоваться в качестве критерия наличия колеса 1.
Присутствие колеса 1 на проходимом транспортном средстве 2, таким образом, может быть обнаружено по наличию изменения заранее определенного вида, например, такого как резкое изменение 10 частоты, повышение или падение 11 и/или уширенный спектр F в принимаемом сигнале Е, каждое из которых должно превышать заранее определенное пороговое значение.
Детекторный блок 5 может представлять собой блок любого известного типа, предназначенным для оценки и обнаружения описанного явления допплеровского сдвига, использующим непрерывный, модулированный или импульсный измерительный луч 6. При использовании непрерывного измерительного луча 6 допплеровский сдвиг между собственными ("несущими") частотами излучаемого и отраженного измерительного луча 6 может быть определен, например, посредством измерения помех. При использовании импульсного или модулированного измерительного луча можно измерять допплеровский сдвиг между частотой импульсов или частотами модуляции испускаемого и отраженного измерительного луча 6. В настоящем изобретении все эти собственные, несущие частоты, частота повторения импульсов или частота модуляции определяются используемыми в настоящем описании едиными терминами "излучаемая частота" (испускаемого измерительного луча 6) и "принимаемая частота" (отраженного измерительного луча 6, причем термин "принимаемая частота" также включает в себя любую частоту измерительного луча, на которую оказал влияние допплеровский эффект.
На фиг.4 показан принимаемый сигнал Е, полученный в момент прохождения транспортным средством 2 детекторного блока 5, в случае, если измерительный луч 6 не попадает на колесо 1, а попадает только на корпус транспортного средства 2, перемещающегося со скоростью v, принимая во внимание связанный с геометрией широкополосный спектр F0. Из фиг.1a, 1b, 1d и 4 (то есть, за исключением фиг.1с, где направление измерительного луча 6 является перпендикулярным направлению движения 4 транспортного средства 2) видно, что резкое возрастание сигнала 9 с фиксацией на практически постоянном уровне, в частности, резкое возрастание 9 сигнала, обусловленное скоростью v, имеет место в принимаемом сигнале Е в интервале времени TF, в течение которого транспортное средство проходит мимо детекторного блока 5. Данная продолжительность TF этого времени прохождения может быть использована для усовершенствования оценки принимаемого сигнала Е с целью детектирования колес транспортного средства, в частности, с помощью способа, описанного ниже.
Данный способ основан на использовании бортовых устройств (OBUs) 15, устанавливаемых на соответствующем транспортном средстве 2, чтобы данное транспортное средство могло участвовать в системе взимания платы за проезд или системе передачи информации. Поскольку обнаружение колес 1 транспортного средства 2 часто используют в качестве основы для оценки величины оплаты, в частности, в системах взимания платы за проезд, бортовые устройства 15, в то же самое время могут быть использованы в таких системах взимания платы за проезд в указанных здесь целях.
На фиг.3 показан вид в разрезе системы 16 взимания платы за проезд, в состав которой входит определенное количество географически разнесенных контрольных устройств 17 (показано лишь одно из них), устанавливаемых вдоль трассы 3, например, на одинаковых расстояниях друг от друга. Контрольные устройства 17 соединены с операционным блоком 19 системы 16 взимания платы за проезд с помощью каналов 18 передачи данных. Система 16 взимания платы за проезд, в частности, ее контрольные устройства 17, определяют величину оплаты (взимают пошлину) за пользование трассой транспортными средствами 2, например, за вождение данных транспортных средств по данной трассе 3.
Для этого контрольные устройства 17 могут быть выполнены, например, в виде радиомаяков, содержащих приемопередатчик 21, смонтированный на платформе 20 и соединенный с ним процессор 22 радиомаяка, который может осуществлять специализированную связь ближнего действия (DSRC) с бортовым устройством (OBU) 15 проходящего мимо транспортного средства 2 ч помощью приемопередатчика 21. Например, радиосвязь DSRC 23 может быть реализована как операция взимания пошлины, о выполнении которой сообщается в операционный блок 19 через радиомаячковый процессор 22 по каналу передачи данных 18, или же данные об этой операции также могут сохраняться в бортовом устройстве OBU 15.
Контрольные устройства (радиомаяки) 17, бортовые устройства OBU 15 и их внутренние приемопередатчики для осуществления специализированной радиосвязи ближнего действия DSRC 23 могут быть выполнены в соответствии со всеми имеющимися стандартами DSRC, в частности, стандартами CEN-DSRC, ITS-G5 или WAVE (беспроводной доступ в автомобильном транспорте). При прохождении радиомаяка 17 каждая радиосвязь DSRC 23 может, например, списывать определенную сумму с текущего счета пользователя в операционном блоке 19 и/или бортовом устройстве OBU 15 и затем производить дебетовую операцию; однако устройство 23 специализированной радиосвязи ближнего действия DSRC также может проводить транзакции идентификации, ведения, корректировки ПО или аналогичные в рамках системы 16 взимания платы за проезд.
Специализированная радиосвязь ближнего действия DSRC 23, в частности, также можно использовать для беспроводного считывания данных, сохраненных в бортовых устройствах OBU 15, таких как исходные данные, идентификационные данные, данные транзакции, публикуемые данные и т.п. Такое беспроводное считывание 23 данных может быть организовано не только на базе стационарных контрольных устройств или радиомаяков 17, но и на базе "мобильных" радиомаяков 17 в форме детекторного блока 5, выполненного в виде контролирующего транспортного средства. Другими словами, детекторный блок 5 сам может выполнять функцию радиомаяка 17, и кроме того, радиомаяк 17, наоборот, может функционировать как детекторный блок 5. Таким образом, все, что было изложено выше относительно способности DSRC по обмену информацией как радиомаяка 17, относится также и к детекторному блоку 5, который с этой целью оборудуют специальным приемопередатчиком 24, и наоборот.
Беспроводное считывание данных OBU 15 посредством радиосвязи DSRC 23, кроме того, может осуществляться в системах взимания платы за проезд 16 через глобальную навигационную спутниковую систему (ГЛОНАСС), в которой вместо сети наземных радиомаяков 17, бортовые устройства OBU 15 в каждом случае автономно сами определяют свое местоположение с помощью приемника ГЛОНАСС и передают данные о своем местоположении или данные о транзакциях по оплате за проезд, определенные на их основе, в операционный блок 19, например, с помощью сети радиомаяков или отдельной сети мобильной радиосвязи. Опять же, бортовые устройства OBU 15 могут быть оснащены приемопередатчиками DSRC для беспроводного считывания данных с помощью радиомаяков (контрольных устройств) 17 или контролирующих транспортных средств (детекторных блоков) 5. Таким образом, описанный здесь способ и рассмотренный детекторный блок 5 могут применяться совместно как с радиомаячковой, так и со спутниковой системами 16 взимания платы за проезд.
Радиосвязь 23 между приемопередатчиком 24 детекторного блока 5 и внутренним приемопередатчиком (не показан) бортового устройства OBU 15 впоследствии используется для считывания информации D, хранимой в OBU и связанной с длиной L транспортного средства 2, с целью расчета основанной на этих данных продолжительности прохождения TF, при известной скорости v транспортного средства 2, по формуле TF=L/v.
Информация D, хранимая в бортовом устройстве OBU 15, может указывать на длину L транспортного средства как прямо, так и косвенно. В последнем случае, например, она может указывать на количество мостов, тип и/или вес транспортного средства, на основании которых (например, с помощью таблиц параметров транспортных средств, хранимых в детекторном блоке 5 или извлекаемых из него) по информации D можно "приблизительно" определить длину L, заложенную ранее для конкретного количества мостов, типа и/или веса транспортного средства.
В свою очередь, скорость v транспортного средства 2 можно замерить детекторным блоком 5 несколькими способами, например, с помощью лазерного спидометра, фотокамеры, светового барьера, и аналогичных устройств, которые устанавливают на детекторном блоке 5 и используют для измерения скорости v проходящего мимо транспортного средства 2. Для этого достаточно измерить скорость v только в конкретной точке в момент прохождения транспортного средства мимо, до данного момента, или после него. В качестве альтернативы, можно также замерить максимальную скорость v транспортного средства, имеющую место в течение прохождения транспортным средством (данной области), и использовать данную величину для расчета минимальной продолжительности прохождения TF и использовать ее для повышения надежности детектирования.
В способе осуществления, представленном на фиг.1-4, скорость v определяют непосредственно посредством радиосвязи 23, точнее, за счет измерения допплеровского сдвига частоты с использованием радиосвязи 23. В данном случае способ основан на использовании специальных приемопередатчиков 24 в детекторном блоке 5, которые могут определять, по меньшей мере, приблизительную скорость v транспортного средства 2 в направлении движения 4 по направлению связи между OBU 15 и приемопередатчиком 24 относительно направления движения 4’ детекторного блока 5, угловые параметры, вытекающие из этих данных, и допплеровский сдвиг частоты радиосвязи 23, замеренный в направлении радиосвязи 23, и, следовательно, движение бортового устройства 15 и приемопередатчика 24 относительно друг друга. Для этого предпочтительно использовать точно такую же радиосвязь 23, как и та, которая используется для считывания информации D с бортового устройства OBU 15.
В качестве альтернативы, скорость v также можно измерять с помощью самого измерительного луча 6, то есть непосредственно по принимаемому радиосигналу Е, например, по амплитуде резкого увеличения частоты 9.
Информация D, указывающая на длину L транспортного средства, может быть ранее введена в бортовое устройство OBU 15, например, она может быть сохранена там при поставке OBU 15 пользователю в соответствии с конкретными параметрами транспортного средства, или может вводиться в OBU 15 самим пользователем после поставки. В качестве варианта, длина L транспортного средства или его характеристики, косвенно указывающие на длину L, такие как количество мостов, тип и/или вес транспортного средства 2, могут измеряться стационарным или мобильным контрольным устройством 17 по всей траектории движения транспортного средства 2, например, с помощью сканнера 21’, фотокамеры, светового барьера или аналогичных устройств, и на основании полученных данных можно формировать информацию D и сохранять ее в бортовом устройстве OBU 15 посредством радиосвязи 23’, как показано на левой стороне фиг.3.
Таким образом, при прохождении транспортным средством 2 детекторного устройства 5, информация D, заложенная в бортовом устройстве OBU 15, считывается посредством радиосвязи 23, и по ней определяется длина L транспортного средства. Одновременно, незадолго до того, или вскоре после того, измеряют скорость v транспортного средства 2, и по определенной длине L и измеренной скорости v транспортного средства можно вычислить время прохождения ТF, как было описано выше.
Как показано на фиг.4, зная продолжительность прохождения TF, можно определить временной интервал W в принимаемом сигнале Е; длина временного интервала равна продолжительности прохождения ТF, и временной интервал совпадает по времени с границами t1, t2 каждого изменения 9 на постоянную величину принимаемого сигнала Е, которые можно считать прохождением корпуса транспортного средства. Иными словами, временной интервал W продолжительностью TF расположен по оси времени t принимаемого сигнала Е, таким образом, что точки его начала и окончания приблизительно совпадают с точками начала и окончания t1, t2 изменения 9 сигнала на постоянную величину.
Соответственно, во временном отрезке 25 принимаемого сигнала Е, предшествующем времени прохождения W, или на временном отрезке 26, непосредственно следующем за временем прохождения W, определяют паразитную составляющую сигнала 27, которую впоследствии используют для компенсации принимаемого сигнала Е во временном интервале W на величину данной паразитной составляющей 27. Например, можно провести частотный анализ принимаемой частоты, имеющей место в сегменте 25 и/или 26, и их можно вычистить, то есть, вычесть из принимаемого сигнала Е временного интервала W.
С этой целью, предпочтительно использовать только отрезок 25, предшествующий временному интервалу W или времени прохождения ТF, поскольку транспортное средство может иметь прицеп, который в последующем сегменте 26 может быть ошибочно принят за паразитную составляющую сигнала. Согласно другому варианту осуществления предлагаемого способа, компонент 27’ сигнала, присутствующий в последующем временном отрезке 26, можно сравнивать с паразитной составляющей 27 сигнала предшествующего временного отрезка 25 и на основании данного сравнения делать вывод о наличии прицепа у транспортного средства 2 в случае значительного отличия компонента 27’ от паразитной составляющей 27.
Кроме того, время прохождения W также можно использовать для ассоциирования всех этих колес 4, обнаруженных в течение одного и того же времени прохождения W, с одним и тем же транспортным средством 2, чтобы вычислить количество мостов данного транспортного средства.
Кроме того, принимаемый сигнал Е можно компенсировать во временном интервале W по частотным компонентам, обусловленным скоростью v транспортного средства 2, например, можно вычитать изменение 9 на постоянную величину для того, чтобы сделать возможным обнаружение изменений 10, 11, F во временном интервале F принимаемого сигнала Е.
Разумеется, для этого можно использовать детекторный блок 5 как в показанной мобильной форме (как контролирующее транспортное средство), так и в стационарной форме, например, с использованием имеющейся радио-инфраструктуры, такой как беспроводной доступ в автомобильном транспорте (WAVE), система взимания платы за проезд с радиомаяками DSRC, радиомаяки беспроводной локальной сети WLAN, или устанавливаемая на обочине Интернет-инфраструктура. Это позволяет использовать существующие приемопередатчики WLAN, WAVE или радиомаяки DSRC, например, в качестве приемопередаточного элемента допплеровского детекторного блока 5. Таким образом, предлагаемый настоящим изобретением способ может быть применен в качестве программного обеспечения, работающего на обычных мобильных или стационарных контрольных устройствах WLAN, WAVE или DSRC или на радиомаяках.
Ранее предполагалось, что излучаемая частота измерительного луча 6 является постоянной, то есть его изменение по времени является постоянной прогрессией. Однако детекторный блок 5 также может испускать измерительный луч 6 с прогрессией излучаемой частоты, которая не является постоянной по времени, например, в случае способов со скачкообразной перестройкой частоты, при которых частота постоянно изменяется (по заданной или известной схеме). Представленные графики изменения принимаемой частоты (комбинации) по времени или принимаемый сигнал Е, показанный на фиг.1a-1d и 4, построены относительно ранее известного изменения по времени излучаемой частоты измерительного луча 6 (либо в постоянной, либо в изменяющейся форме), то есть со ссылкой или стандартизованный относительно данного известного изменения, так чтобы можно было компенсировать влияние известных изменений излучаемой частоты по времени.
Таким образом, настоящее изобретение не ограничивается представленными вариантами осуществления, но распространяется и на все возможные варианты и модификации, охватываемые объемом приведенной формулы изобретения.
Изобретение относится к способу детектирования колеса (1). Техническим результатом является повышение надежности детектирования и эффективности процесса оценки сигнала. Детектирование осуществляется посредством испускания электромагнитного измерительного луча (6), регистрации частот отраженного измерительного луча (6) по времени в качестве принимаемого сигнала (Е) и детектирования изменений (10, 11, F) определенного типа в принимаемом сигнале (Е) как колеса (1), при котором на транспортном средстве (2) устанавливается бортовое устройство (15), в котором хранится информация (D), определяющая, по меньшей мере, косвенно длину (L) данного транспортного средства; при этом данный способ предусматривает считывание указанной информации (D) из бортового устройства (15) посредством радиосвязи (23) и с помощью измерения скорости (v) транспортного средства (2); вычисление продолжительности (ТF) прохождения транспортного средства (2) мимо детекторного блока (5) на основе вышеуказанной информации (D) и скорости (v); определение временного интервала (W) в принимаемом сигнале (Е), демонстрирующем приблизительно постоянное изменение (9) в течение вышеуказанной продолжительности (TF); определение паразитной составляющей (27) сигнала в сегменте (25) принимаемого сигнала (Е), непосредственно предшествующем данному временному интервалу (W); и компенсацию принимаемого сигнала (Е) во временном интервале (W) на величину паразитной составляющей (27) сигнала. 14 з.п. ф-лы, 7 ил.
1. Способ детектирования колеса (1) транспортного средства (2), характеризующийся тем, что испускают из детекторного блока (5) электромагнитный измерительный луч (6) с известным изменением частоты по времени, регистрируют в качестве принимаемого сигнала (Е) изменение частоты по времени для измерительного луча (6), отраженного на детекторный блок (5), относительно указанного известного изменения частоты по времени и детектируют в принимаемом сигнале (Е) изменение (10, 11, F) заранее определенного вида в качестве колеса (1),
при этом транспортное средство (2) содержит бортовое устройство (15), способное устанавливать радиосвязь (23) с приемопередатчиком (24) детекторного блока (5) и сохранять информацию (D), указывающую, по меньшей мере, косвенно на длину (L) транспортного средства; причем способ включает:
считывание указанной информации (D) из бортового устройства (15) посредством радиосвязи (23) и измерение скорости (v) транспортного средства (2);
вычисление продолжительности (ТF) прохождения транспортного средства (2) мимо детекторного блока (5) на основе указанной информации (D) и скорости (v);
определение временного интервала (W) в принимаемом сигнале (Е), демонстрирующем приблизительно постоянное изменение (9) принимаемого сигнала (Е) в течение указанной продолжительности (TF);
определение паразитной составляющей (27) сигнала в сегменте (25) принимаемого сигнала (Е), непосредственно предшествующем указанному временному интервалу (W); и
компенсацию принимаемого сигнала (Е) в указанном временном интервале (W) на величину паразитной составляющей (27) сигнала перед детектированием колеса (1).
2. Способ по п.1, отличающийся тем, что информация (D), хранящаяся в бортовом устройстве (15), непосредственно указывает на длину (L) транспортного средства.
3. Способ по п.1, отличающийся тем, что информация (D), хранящаяся в бортовом устройстве (15), указывает на количество мостов, тип и/или вес транспортного средства (2), на основании которых определяют приблизительную длину (L) транспортного средства.
4. Способ по любому из пп.1-3, отличающийся тем, что скорость (v) транспортного средства (2) измеряют посредством измерения допплеровского сдвига частоты с помощью радиосвязи (23) между бортовым устройством (15) и приемопередатчиком (24).
5. Способ по п.4, отличающийся тем, что измерение допплеровского сдвига частоты выполняют с помощью радиосвязи (23), используемой для считывания указанной информации (D).
6. Способ по любому из пп.1-3, отличающийся тем, что выполняют перед детектированием колеса (1) компенсацию принимаемого сигнала (Е) на величину составляющих частоты, обусловленных скоростью (v) транспортного средства (2).
7. Способ по любому из пп.1-3, отличающийся тем, что изменение (10, 11, F) детектируется в качестве колеса (1) только в случае, если такое изменение присутствует в указанном временном интервале (W).
8. Способ по любому из пп.1-3, отличающийся тем, что колеса (1), детектируемые в одном и том же временном интервале (W), ассоциируются с одним и тем же транспортным средством (2).
9. Способ по любому из пп.1-3, отличающийся тем, что принимаемый сигнал (Е, 27') сравнивают с паразитной составляющей (27) сигнала в сегменте (26), следующем непосредственно за указанным временным интервалом (W), и исходя из этого обнаруживают наличие прицепа транспортного средства (2).
10. Способ по любому из пп.1-3, отличающийся тем, что длину (L) транспортного средства или параметр транспортного средства, косвенным образом характеризующий длину, измеряют с помощью стационарного или мобильного контрольного устройства (17) и исходя из этого измерения формируют информацию (D) и сохраняют ее в бортовом устройстве (15) с помощью радиосвязи (23').
11. Способ по п.10, отличающийся тем, что измеряемым параметром транспортного средства является количество мостов, тип и/или вес транспортного средства (2).
12. Способ по любому из пп.1-3, отличающийся тем, что измерительный луч (6) представляет собой луч радиолокатора, испускаемый направленной антенной, предпочтительно в диапазоне частот выше 70 ГГц.
13. Способ по любому из пп.1-3, отличающийся тем, что указанное изменение (10, 11, F) заранее определенного вида представляет собой скачок (10), повышение (11), падение (11) или уширенный спектр (F) принимаемого сигнала (Е), в каждом случае превышающий заданное пороговое значение.
14. Способ по любому из пп.1-3, отличающийся тем, что детекторный блок (5) устанавливают на контролирующем транспортном средстве.
15. Способ по любому из пп.1-3, отличающийся тем, что радиосвязь (23, 23') осуществляют в соответствии со стандартами CEN-DSRC или ITS-WAVE.
| US2003102997 A1, 05.06.2003 | |||
| US2004168512 A1, 02.09.2004 | |||
| DE102008037233 A1, 25.03.2010 | |||
| US2005235744 А1, 27.10.2005 | |||
| DE19928624 A1, 11.01.2001 | |||
| УСТРОЙСТВО ФИКСАЦИИ ПРОХОЖДЕНИЯ КОЛЕСНОЙ ПАРЫ | 2008 |
|
RU2379209C1 |
| УСТРОЙСТВО И СПОСОБ ДЛЯ ОБНАРУЖЕНИЯ НАРУШЕНИЙ ДОРОЖНОГО ДВИЖЕНИЯ С ДИНАМИЧЕСКИМИ СИСТЕМАМИ НАВЕДЕНИЯ | 1997 |
|
RU2175780C2 |

