Изобретение относится к способу и устройству для обнаружения вращающегося колеса транспортного средства, которое движется по проезжей части в направлении движения и колеса которого, по меньшей мере, частично открыты сбоку.
Обнаружение колес транспортных средств представляет интерес в многочисленных областях. Так, обнаружив колеса, можно надежно распознать движение по определенному участку, например, для пограничного контроля или для инициирования определенных действий, таких как срабатывание тревоги, включение освещения, подъем шлагбаума, фотосъемка в целях контроля и т.д. Также современные системы взимания дорожного сбора нередко нацелены для его расчета на число осей транспортных средств, так что обнаружение колес (колесных осей) может быть также важной основой взимания или контроля дорожного сбора, в частности, также посредством передвижных контрольных транспортных средств, которые, проезжая мимо или навстречу, должны контролировать число осей подлежащих оплате транспортных средств.
Из документа DE 102008037233 А1 известно обнаружение колес движущегося транспортного средства на основе их отличающейся от остального транспортного средства горизонтальной составляющей тангенциальной скорости, которая вызывает соответствующий допплеровский сдвиг частот измерительного луча радара. Для этого используют радарный скоростемер, который лепестком излучения облучает нижнюю часть проезжающих транспортных средств и по смеси принятых частот усредняет по времени единственный измерительный сигнал скорости, указывающий в местах колес максимумы, используемые для обнаружения колес. Однако промежутки между тягачом и его прицепом могут имитировать максимумы сигнала и, тем самым, промежуточные «фальшивые» максимумы, которые приводят к ошибочному обнаружению колес.
Задачей изобретения является создание способов и устройств, которые обеспечивали бы более надежное обнаружение, чем известные решения.
Эта цель достигается, согласно первому аспекту изобретения, посредством способа, отличающегося следующими этапами:
- посылка электромагнитного измерительного луча с известной временной характеристикой его частоты на первую область над проезжей частью в направлении наискось к вертикали и перпендикулярно или наискось к направлению движения;
- прием отраженного измерительного луча и запись временной характеристики его частот по отношению к известной характеристике в качестве характеристики смеси принятых частот;
- обнаружение непрерывно возрастающей или убывающей в течение отрезка времени полосы частот в характеристике смеси принятых частот в качестве колеса.
Изобретение основано на нейтральном подходе обнаружения движущегося приблизительно горизонтально мимо допплеровского датчика колеса с помощью характеристики смеси принятых частот, которая при прохождении возрастает (например, если допплеровский датчик расположен над колесной осью, направлен вниз и навстречу колесу) или убывает (например, если допплеровский датчик расположен под колесной осью, направлен вверх и навстречу колесу). Иначе, нежели в известном уровне техники (DE 102008037233 А1), оценивается не максимум сигнала на колесо, а характеристика сигнала при прохождении колеса.
В идеальном случае линейного измерительного луча, падающего на колесо сверху или наискось сбоку перпендикулярно направлению движения, характеристика обусловленного допплеровским эффектом частотного сдвига отраженного измерительного луча является линейно возрастающей или убывающей. Если измерительный луч направлен не перпендикулярно, а наискось к направлению движения, с этой характеристикой суммируется обусловленный горизонтальными составляющими тангенциальной скорости колеса допплеровский сдвиг, который приводит к аддитивному смещению характеристики, однако ничего не меняет в критерии обнаружения возрастающей или убывающей при прохождении колеса характеристики принятых частот.
Кроме того, в действительности сечение измерительного луча никогда не бывает идеально точечным, а всегда вытянуто, например, до зоны падения на транспортное средство порядка нескольких сантиметров или нескольких десятков сантиметров. За счет этого принятые частоты описанной линейной характеристики расширяются в «смесь» или «полосу» принятых частот, поскольку в изменяющихся положениях по высоте и ширине в зоне падения измерительного луча вращающееся колесо имеет соответственно изменяющиеся вертикальные и горизонтальные составляющие тангенциальной скорости, создавая, тем самым, различный допплеровский частотный сдвиг, который приводит к «расщеплению» или «расширению» переданной частоты измерительного луча до большого числа одновременно отраженных принятых частот, т.е. к «смеси принятых частот»; если рассматривать по времени, то смесь принятых частот проходит по типу полосы в плоскости частота/время с описанной возрастающей или убывающей характеристикой.
На этот обусловленный скоростью колеса эффект расширения накладывается второй паразитный эффект частотного расширения, который объясняется различными углами проецирования вертикальных и горизонтальных составляющих тангенциальной скорости на направление к приемнику. Этот угол проецирования изменяется в зависимости от рассматриваемого места отражения в зоне падения. Второй эффект расширения зависит от того, прошел ли как раз кузов транспортного средства или прошло ли как раз вращающееся колесо мимо приемника, и определяется единственно геометрическими краевыми условиями измерительного устройства. Оба эффекта накладываются на названную полосовую характеристику смеси принятых частот в зависимости от времени.
В первом варианте осуществления изобретения названное обнаружение может осуществляться за счет оценки характеристики среднего значения частоты полосы, которое при прохождении колеса указывает описанное возрастание или убывание.
Во втором варианте осуществления изобретения названное обнаружение может осуществляться за счет контроля того, попадает ли полоса в заданный контур в плоскости частота/время. Контур представляет собой максимальные границы, в пределах которых могут встречаться характеристики принятых частот для различных линий сканирования, и, если все измеренные значения допплеровских принятых частот по времени попадают в названный контур, имеет место непрерывно возрастающая или убывающая в течение отрезка времени полоса частот в характеристике смеси принятых частот, что указывает на колесо.
Согласно одному предпочтительному варианту осуществления изобретения, измерительный луч посылается перпендикулярно направлению движения наискось снизу. За счет этого можно, с одной стороны, минимизировать затенения колес и надежно обнаружить промежуток между прицепом и тягачом, а с другой стороны, уменьшить, за исключением упомянутых эффектов расширения, горизонтальные составляющие скорости вращающегося колеса и составляющую скорости транспортного средства, что облегчает обнаружение названных возрастающих и убывающих полос в характеристике смеси принятых частот.
Для дальнейшего улучшения обнаружения полосы предложенный способ может включать в себя в опциональном варианте следующие этапы:
- измерение скорости кузова транспортного средства относительно места посылки измерительного луча и приема отраженного измерительного луча;
- компенсацию характеристики смеси принятых частот на частотные доли, вызванные скоростью кузова, прежде чем будет осуществлен этап обнаружения полосы.
По тем же причинам способ может опционально включать в себя также обнаружение присутствия части кузова транспортного средства в лежащей выше первой области второй области временной характеристики в качестве временного окна прохождения, причем обнаружение колеса в характеристике смеси принятых частот осуществляется только во временном окне прохождения.
Зная временное окно прохождения транспортного средства, можно продолжить обрабатывать измеренную характеристику смеси принятых частот, чтобы облегчить обнаружение полосы в ней, а именно посредством следующих этапов:
- определение доли паразитных сигналов на непосредственно предшествующем временному окну прохождения отрезке характеристики смеси принятых частот;
- компенсация характеристики смеси принятых частот во временном окне прохождения на долю паразитных сигналов, прежде чем будет осуществлен этап обнаружения полосы.
В одном варианте способа колеса, обнаруживаемые в одном и том же временном окне прохождения, относят к одному и тому же транспортному средству. Число его колес может быть привлечено в качестве основы, например, для зависимого от колесных осей расчета дорожного сбора.
Чтобы уменьшить названные паразитные эффекты расширения и достичь выраженной возрастающей или убывающей характеристики смеси принятых частот, предпочтительно минимизируется зона падения измерительного луча на транспортное средство. Предпочтительно для этого измерительный луч имеет зону падения, диаметр которой меньше обнаруживаемого колеса, предпочтительно меньше 10 см, особенно предпочтительно меньше 5 см.
В одном варианте изобретения для этого можно использовать фокусированный лазерный луч, или в одном альтернативном предпочтительном варианте измерительный луч является посылаемым направленной антенной лучом радара, предпочтительно в частотном диапазоне свыше 70 ГГц. При таких высоких частотах длина волны очень мала, что позволяет реализовать антенны с высоким коэффициентом усиления механически очень маленькими, например, в виде рупорных антенн или антенных решеток.
Согласно второму аспекту изобретения, создано устройство для обнаружения вращающегося колеса транспортного средства, которое движется по проезжей части в направлении движения и колеса которого, по меньшей мере, частично открыты сбоку, при этом оно содержит:
- допплеровский лидар или радар, который посылает электромагнитный измерительный луч с известной временной характеристикой его частоты наискось к вертикали и перпендикулярно или наискось к направлению движения на цель над проезжей частью и записывает временную характеристику частот отраженного от цели измерительного луча относительно известной характеристики в качестве характеристики смеси принятых частот;
- расположенный за ним блок обработки, который обнаруживает непрерывно убывающую или возрастающую в течение отрезка времени полосу частот в характеристике смеси принятых частот в качестве колеса.
В отношении преимуществ предложенного устройства следует сослаться на приведенные выше рассуждения, относящиеся к предложенному способу.
Предпочтительно измерительный луч допплеровского лидара или радара ориентирован перпендикулярно направлению движения наискось снизу.
Особенно благоприятно, если устройство содержит связанный с блоком обработки датчик для измерения скорости кузова транспортного средства, причем блок обработки компенсирует характеристику смеси принятых частот на частотные доли, вызванные скоростью кузова.
Согласно другому предпочтительному варианту, устройство содержит связанный с блоком обработки датчик, обнаруживающий присутствие части кузова транспортного средства выше области, на которую направлен измерительный луч, во временной характеристике в качестве временного окна прохождения, причем блок обработки обнаруживает колесо в характеристике смеси принятых частот только во временном окне прохождения. При этом блок обработки опционально может быть выполнен для определения доли паразитных сигналов на непосредственно предшествующем временному окну прохождения отрезке характеристики смеси принятых частот и для компенсации характеристики смеси принятых частот во временном окне прохождения на долю паразитных сигналов.
В случае допплеровского радара его измерительный луч является предпочтительно посылаемым направленной антенной лучом радара, особенно предпочтительно в частотном диапазоне свыше 70 ГГц; в случае лидара измерительный луч является предпочтительно фокусированным лазерным лучом.
Предложенное устройство подходит как для стационарного, так и для переносного, в частности, мобильного, использования. В первом случае устройство, если оно работает с допплеровским радаром, может быть выполнено особенно для взаимодействия с радиомаяками уже существующей дорожной радиоинфраструктуры, такой как WLAN (wireless local area network - беспроводная локальная сеть), WAVE (wireless access in a vehicle environment - система беспроводного доступа к транспортным средствам) или DSRC (dedicated short range communication - система связи ближнего действия). В одном целесообразном варианте допплеровский радар образован установленным на дороге радиомаяком WLAN-, WAVE- или DSRC-системы. Во втором случае допплеровский лидар или радар устанавливается на мобильной платформе, в частности на контрольном транспортном средстве, для обеспечения контроля транспортных средств на других или встречных полосах движения.
Другие признаки и преимущества способа и устройства, согласно изобретению, приведены в нижеследующем описании предпочтительного примера его осуществления изобретения со ссылкой на прилагаемые чертежи, на которых представлено следующее:
фиг.1, 2 - устройство, согласно изобретению, установленное на контрольном автомобиле в сочетании с контролируемым им автомобилем при виде сверху и в направлении движения соответственно;
фиг.3 - подробно соотношения скоростей на вращающемся колесе;
фиг.4 - пример характеристики смеси принятых частот в плоскости частота/время при замере колеса из фиг.3 сбоку сверху и перпендикулярно направлению движения во встречном движении;
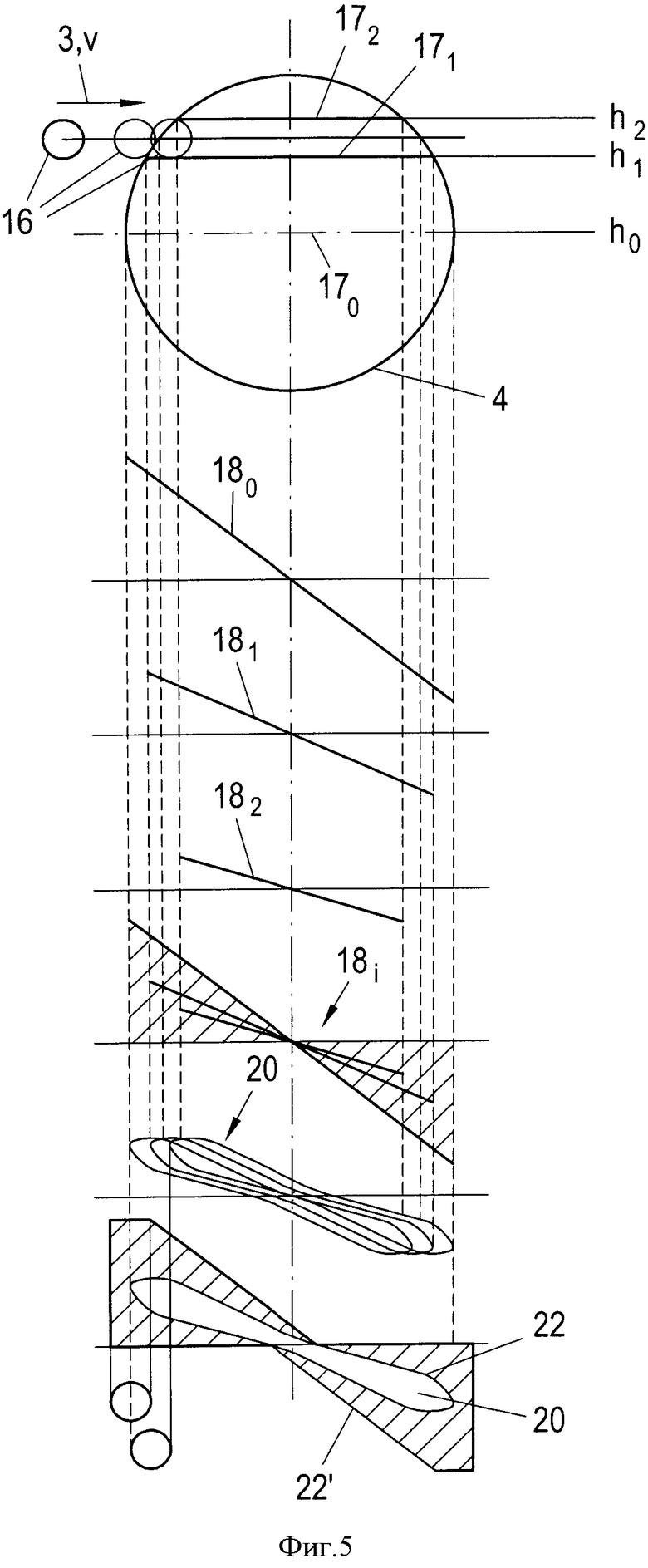
фиг.5 - образование контура для обнаружения возрастающей или убывающей полосы в характеристике смеси принятых частот в плоскости частота/время;
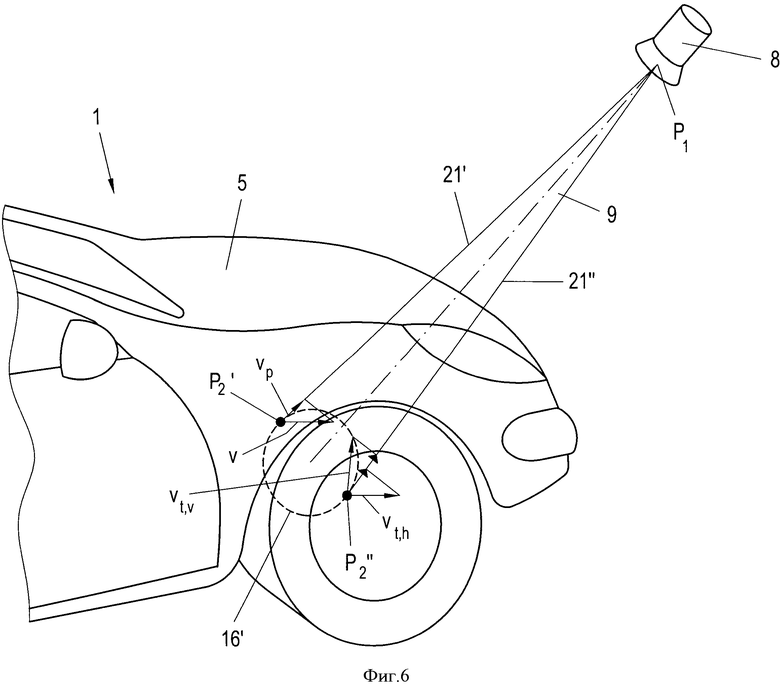
фиг.6 - геометрические отношения в реально расширяющемся измерительном луче для иллюстрации обусловленных скоростью и геометрией эффектов частотного расширения;
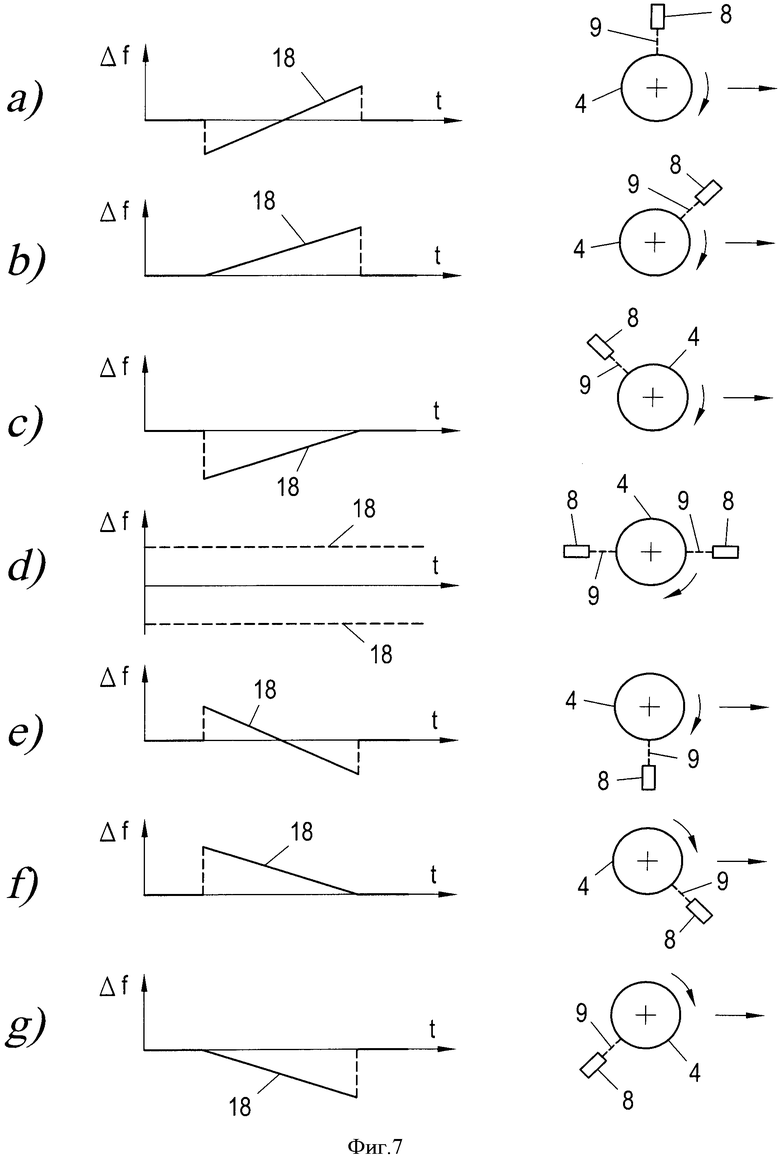
фиг.7a-7g - примеры идеальных характеристик принятых частот или средние значения характеристик смесей принятых частот в разных угловых положениях допплеровского измерительного луча относительно колеса;
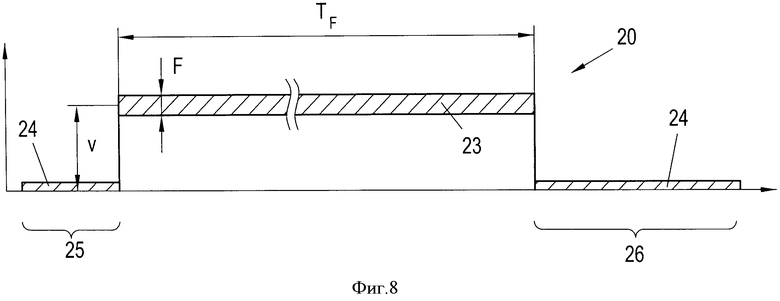
фиг.8 - эффект обусловленного геометрией частотного расширения при прохождении транспортного средства во временной характеристике;
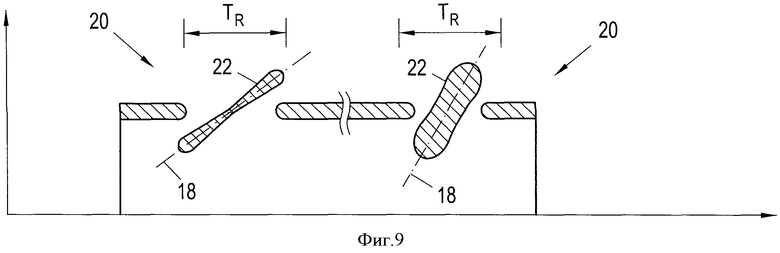
фиг.9 - влияние эффектов обусловленного скоростью и геометрией частотного расширения характеристики смеси принятых частот при прохождении транспортного средства с двумя колесами в качестве примера, причем слева и справа использовались два разных сечения измерительного луча.
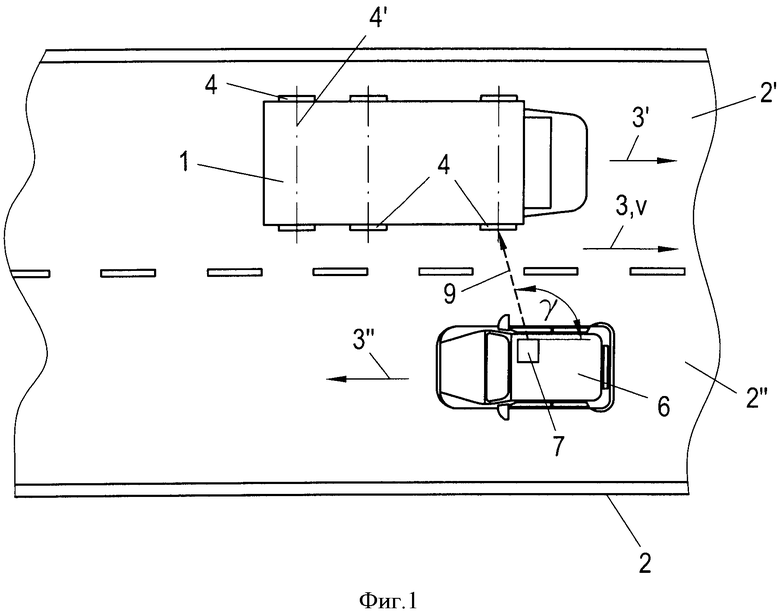
На фиг.1 и 2 автомобиль 1 движется по проезжей части 2, точнее по ее полосе 2′, 3′. Колеса 4 автомобиля 1 выдаются вниз за его кузов 5 и при этом, по меньшей мере, частично открыты по бокам кузова 5 в его нишах, т.е. видны сбоку.
По второй полосе 2” проезжей части 2 во встречном направлении 3” движется контрольный автомобиль 6. Направления движения 3′, 3” предпочтительно встречно-параллельные, однако могут быть также параллельными, т.е. контрольный автомобиль 6 может обгонять автомобиль 1 или наоборот. Контрольный автомобиль 6 может быть также неподвижным, а направления движения 3′, 3” могут быть непараллельными; ниже направлением движения 3 автомобиля 1 называется направление его движения относительно контрольного автомобиля 6. Простоты ради следует также исходить из того, что направление движения 3 проходит перпендикулярно осям 4′ колес 4 и приблизительно горизонтально, хотя это необязательно, а отклонения от этого выражаются лишь в соответственно измененных угловых проекциях рассматриваемых ниже составляющих скорости.
Контрольный автомобиль 6 несет измерительное устройство 7 с допплеровским лидаром или радаром 8, который посылает электромагнитный измерительный луч 9, здесь измерительный луч лидара или радара, на автомобиль 1 или его колеса 4 при прохождении, чтобы, таким образом, распознать их. Измерительный луч 9 ориентирован под углом β к вертикали V и под углом γ к направлению движения 3. Угол β составляет 0≤β<90° или 90°<β≤180°, во всяком случае, ≠90°, т.е. измерительный луч 9 проходит наискось к вертикали V, предпочтительно, как показано, наискось вниз, например под углом β=100-170°, предпочтительно 120-150°. В одном альтернативном варианте (не показан) измерительный луч 9 может быть направлен также наискось вверх, например β=10-80°, предпочтительно 30-60°, если допплеровский лидар/радар 8 установлен близко к земле, например неподвижно сбоку дороги 2, и засекает автомобили 1 и их колеса 4 наискось снизу.
Угол γ составляет предпочтительно 90°, т.е. измерительный луч 9 ориентирован перпендикулярно направлению движения 3. В альтернативных вариантах угол γ может быть также ≠90°, например может быть направлен наискось вперед или наискось назад, если смотреть от контрольного автомобиля 6.
Допплеровский лидар/радар 8 обрабатывает, как это известно в технике, принятую частоту отраженного от автомобиля 1 или его колес 4 измерительного луча 9, причем по обусловленному допплеровским эффектом частотному сдвигу между посланным и отраженным измерительными лучами 9 можно определить лежащую в направлении измерительного луча 9 (проецированную) составляющую vp относительной скорости v автомобиля 1 и тангенциальной скорости vt колеса 4 в соответствующей точке Р зоны падения измерительного луча 9 (фиг.3 и 5). Впоследствии по этой информации можно обнаружить колеса 4 автомобиля 1, как это подробно поясняется ниже.
Допплеровский лидар/радар 8 может быть любого известного в технике типа, будь то с непрерывным, модулированным или импульсным измерительным лучом 9. В случае непрерывного измерительного луча 9 можно, например, посредством интерференционного измерения определить допплеровский сдвиг между собственными частотами («несущими частотами») посланного и отраженного измерительных лучей 9. В случае импульсного или модулированного измерительного луча можно измерить допплеровский сдвиг между частотами повторения импульсов или частотами модуляции посланного и отраженного измерительных лучей 9. Все эти собственные частоты, несущие частоты, частоты повторения импульсов и частоты модуляции следует понимать как употребляемые здесь термины «посланная частота» измерительного луча 9 и «принятая частота» отраженного измерительного луча 9, т.е. термин «принятая частота» включает в себя любую частоту измерительного луча 9, на которую влияет допплеровский эффект.
Как показано на фиг.2, измерительное устройство 7 содержит также датчик 10 для измерения (относительной) скорости v автомобиля 1 относительно контрольного автомобиля 6 и датчик 11 для обнаружения присутствия части кузова 5 при прохождении автомобиля 1 мимо контрольного автомобиля 6. Датчик присутствия 11 «видит» и обнаруживает кузов 5 в зоне, в которой на автомобиль 1 направлен также измерительный луч 9, при прохождении автомобиля, на основе чего можно определить временное окно TF прохождения автомобиля 1 относительно лидара/радара 8, как это поясняется ниже более подробно. Датчик присутствия 11 и его зрительная ось 12 расположены предпочтительно над измерительным лучом 9 лидара/радара 8 или в известном геометрическом отношении к нему для получения временного соотношения между временным окном TF прохождения и измерительными сигналами лидара/радара 8. Зная измеренную датчиком 10 скорость v, можно по временному окну TF прохождения вычислить также длину L автомобиля по формуле L=v·Т.
Лидар/радар 8 и датчики 10, 11 скорости и присутствия подключены к блоку обработки 14 устройства 7, который осуществляет описанные расчеты для обнаружения колеса.
На фиг.3 различные варианты измерительного луча 9 в отношении его фокусировки или расширения изображены с помощью нескольких примеров зон падения 16, 16′, 16” разной величины на колесе 4. В первом варианте измерительный луч 9 сильно фокусирован, так что его зона падения 16 на кузове 5 или колесе 4 имеет крайне малый диаметр в диапазоне нескольких сантиметров, предпочтительно <2 см. В зависимости от удаленности прибора 8 от автомобиля 1 следует предъявлять определенные требования к фокусировке измерительного луча 9. В идеальном случае он является пучком почти параллельных лучей света или радара, как этого можно достичь предпочтительно с помощью лазера. Однако и в случае измерительного луча радара можно достичь соответствующей фокусировки за счет использования волн радара очень высокой частоты, предпочтительно свыше 70 ГГц, которые обладают приблизительно свойствами света и могут фокусироваться, как свет, например посредством линз радара. Сформировать соответствующий измерительный луч можно также, используя направленные антенны, например рупорные антенны, антенные решетки и патч-антенны с максимально параллельной характеристикой излучения малого диаметра. Для этого особенно подходят радары, используемые в автомобильной промышленности и устанавливаемые, например, в автомобилях в качестве сигнализаторов предупреждения столкновений и сигнализаторов опасной дистанции. Такие фокусированные измерительные лучи 9 имеют фокусирование или диапазон расхождения (угол раскрыва) менее 1° (соответствует пространственному углу менее примерно 0,00024 ср).
Во втором варианте измерительный луч 9 имеет более сильное расхождение, например рассеян или расширен поверхностно или воронкообразно, по типу «лепестка измерительного луча», с существенно большей зоной падения 16′. Такая зона падения 16′ может быть достигнута у лидара, например за счет установленной спереди него рассеивающей линзы, или возникает у неточно фокусированных радаров.
В случае радара расширенный измерительный луч 9 характеризуется углом раскрыва используемой радарной антенны. Углом раскрыва направленной антенны (или также полушириной) называют соответственно точки, где мощность по сравнению с максимумом упала наполовину (-3 дБ). Как известно специалисту, для направленных антенн, зная соответствующие углы раскрыва, коэффициент усиления антенны в направлении ее главного излучения можно определить по формуле:
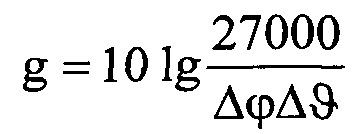
где g = коэффициент усиления [дБи], Δφ = горизонтальный угол раскрыва (в градусах), Δϑ = вертикальный угол раскрыва (в градусах).
Угол раскрыва радарной антенны прибора 8 должен обеспечивать хорошее обособление отдельных колес 4 в измерительном сигнале обнаруживаемого автомобиля 1. Благоприятно, например, если зона падения 16′ измерительного луча 9 не превышает половину диаметра колес. Оптимальная зона падения 16′ возникает здесь из измеренного расстояния до автомобиля 1, т.е. также выбор радарной антенны зависит от геометрии всего устройства. Особенно подходят, в целом, антенны с коэффициентом усиления g свыше 10 дБ в зависимости от расположения и частоты радара 8.
Направленные антенны имеют обычно коэффициент усиления g свыше 20 дБ (соответствует углу раскрыва Δφ=Δϑ = около 16°). Таким образом, в случае коэффициента усиления 20 дБ можно на расстоянии 1 м между автомобилем 1 и контрольным автомобилем 6 осветить зону 16′ диаметром около 28 см. Для более удаленных автомобилей 1 может быть необходимым коэффициент усиления g 30 дБ для достижения угла раскрыва Δφ=Δϑ = около 5°, который на расстоянии 3 м означает освещение зоны 16′ диаметром около 30 см.
В третьем варианте величина зоны падения 16” измерительного луча 9 на колесе 4 лежит между вариантами 16 и 16′, например в диапазоне 2-10 см, предпочтительно 2-5 см.
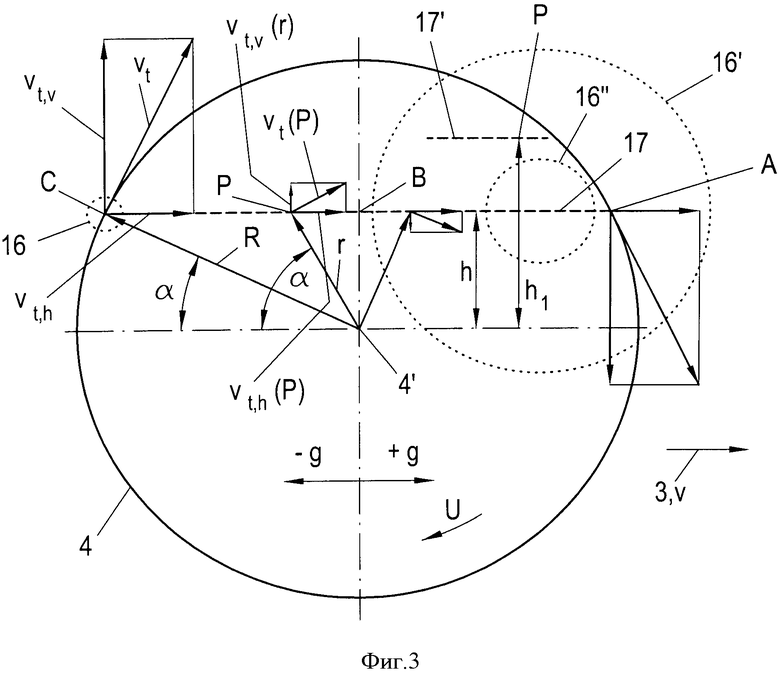
На фиг.3 изображено движение зон падения 16, 16′, 16” при взаимном прохождении автомобиля 1 и контрольного автомобиля 6 вдоль линии сканирования 17, которая в данном примере пересекает колесо 4 приблизительно посередине его верхней половины. Возникающую в точке Р линии сканирования 17 на радиусе r тангенциальную скорость vt и тангенциальную скорость vt(p) точки Р вращающегося в направлении U колеса 4 можно разложить соответственно на горизонтальную vt, h(Р) и вертикальную vt, v(P) составляющие. Горизонтальная составляющая vt, h(Р) остается при прохождении колеса 4 по заданной горизонтальной линии сканирования 17, в основном, постоянной, тогда как вертикальная составляющая vt, v(P) изменяется от отрицательного максимального значения vt, v(A) в точке А на периферии колеса через значение 0 в точке В над его осью 4′ до положительного максимального значения vt, v(С) в точке С на другой периферии колеса.
Более подробно тангенциальная скорость vt(r) на радиусе r пропорциональна ему, а именно по формуле:

Вертикальная составляющая vt, v(r) тангенциальной скорости vt(r) под углом α является косинусной проекцией в соответствии с формулой:

При 
вертикальная составляющая vt, v(r) тангенциальной скорости вычисляется, тем самым, по формуле:

где g означает расстояние по горизонтали до центра колеса, которое, тем самым, при сканировании с постоянной скоростью v пропорционально времени t, что описывает линейное возрастание или убывание.
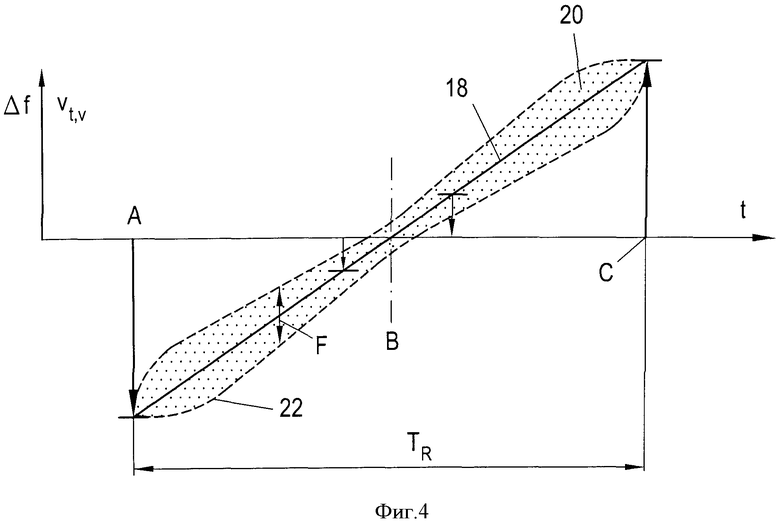
Если измерительный луч 9 направлен перпендикулярно направлению движения (γ=90°) и, например, наискось сверху (90°<<β<<180°), то лидар/радар 8 измеряет допплеровский частотный сдвиг Δf, который точно соответствует этой вертикальной составляющей vt, v(P). Частотный сдвиг Δf нанесен на фиг.4 в зависимости от времени t в виде характеристики 18 принятой частоты. Допплеровский сдвиг Δf принятой частоты по сравнению с переданной частотой пропорционален вертикальной составляющей vt, v скорости соответственно сканированных частей (точек Р) автомобиля 1 или колеса 4; поэтому характеристика 18 равнозначна характеристике вертикальной скорости.
Характеристика 18 на фиг.4 является идеализированной характеристикой идеализированного измерительного луча 9 точечного сечения. Характеристика 18 показывает в зависимости от отрезка TR времени, соответствующего сканированию колеса 4 вдоль линии сканирования 17 со скоростью v, линейное, проходящее через нуль возрастание с vt,v(A) до vt,v(B). Если бы измерительный луч 9 был направлен на колесо 4 наискось снизу (β>90°) или перемещался бы в обратном направлении вдоль линии сканирования 17 (например, контрольный автомобиль 6 обгоняет автомобиль 1), то характеристика 18 показывала бы убывание, т.е. была бы зеркальной вокруг временной оси t на фиг.4.
За счет расширения зоны падения 16, 16′, 16” реального, неидеализированного измерительного луча 9 для каждой посланной в определенный момент времени t частоты получают не только допплеровский сдвиг принятой частоты в отраженном измерительном луче 9, но и, исходя из каждой разной точки в зоне падения 16, 16′, 16”, незначительное отклонение принятой частоты. Это обусловлено, с одной стороны, тем, что на высоте h1 колеса 4, отличающейся от высоты h линии сканирования 17, вертикальная vt, v и горизонтальная vt, h составляющие тангенциальной скорости vt колеса имеют соответственно несколько иное значение, так что принятые частоты, происходящие от разных лежащих в зонах 16, 16′, 16” точек падения Р (см. пример линии сканирования 17′ на фиг.3), совмещаются в смесь различных принятых частот или скоростей (фиг.4).
Другими словами, во время прохождения TF автомобиля 1 при появлении колеса 4 принятая частота f расщепляется или расширяется в обусловленную допплеровским эффектом смесь F принятых частот (или скоростей), что приводит к характеристике 20 принятых частот в зависимости от времени t.
На обусловленный скоростью колеса эффект частотного расширения паразитно накладывается второй эффект частотного расширения, который обусловлен геометрией самого воронкообразно расширяющегося измерительного луча 9. Как видно на фиг.6, лидар/радар 8 наблюдает с места P1 различные точки R2′, Р2” в зоне падения 16′ измерительного луча 9 соответственно с другого пространственного направления 21′, 21”, которые заключают с вертикальной vt, v и горизонтальной vt, h составляющими тангенциальной скорости vt колеса 4 или скорости v кузова 5 соответственно другой угол в пространстве. Проекция скорости vt, v или vt, h на соответствующее направление 21′, 21” и т.д. в измерительном луче 9 приводит за счет этого к обусловленному геометрией расщеплению или расширению.
Вызванное вращающимся колесом, обусловленное скоростью расширение (фиг.3) накладывается на обусловленное скоростью расширение (фиг.6) в показанную на фиг.4 «реальную» характеристику 20 принятых частот с переменным в зависимости от времени t расширением F.
Как видно на фиг.4, характеристика 20 показывает, тем самым, в течение отрезка TF времени прохождения в случае направленного наискось сверху или наискось снизу (0<β<180°) и приблизительно перпендикулярно направлению движения 3 (γ=90°) измерительного луча 9 непрерывно возрастающую или в зависимости от направления рассмотрения убывающую полосу 22, что можно использовать в качестве критерия появления колеса 4 и, тем самым, его обнаружения. Полосу 22 можно обнаружить, например, сигнально-аналитическим путем, посредством усреднения соответственно возникающей смеси F принятых частот, т.е. посредством анализа среднего значения частоты, которое, в основном, снова соответствует идеализированной характеристике 18.
На фиг.5 изображен альтернативный вид обнаружения возникновения возрастающей или убывающей полосы 22, а именно за счет контроля того, попадает ли характеристика 20 принятых частот в заданный контур 22′, представляющий собой максимальные границы, в пределах которых могут возникать характеристики 180, 181, 182, …, 18i принятых частот для различных линий сканирования 170, 171, 172, … на различных высотах h0, h1, h2, … Наложение всех возможных характеристик 18i принятых частот для определенной зоны падения 16 дает заданный контур 22′ в плоскости частота/время на фиг.4 и 5, в пределы которого в любом случае попадает полоса 22.
Размер и форма контура 22′ зависят, правда, от размера зоны падения 16, однако его общая конфигурация в зависимости от времени t является всегда возрастающей или убывающей. За счет контроля того, лежат ли все (или, по меньшей мере, преобладающая часть, т.е. вплоть до нескольких статистических выпадающих значений) измеренные значения принятых частот характеристики 20 их смеси в пределах контура 22′, можно также обнаружить возникновение непрерывно возрастающей или убывающей в течение отрезка времени полосы 22 и, тем самым, колесо 4.
Если измерительный луч 9 направлен на автомобиль 1 или колеса 4 не перпендикулярно направлению движения 3, а наискось (γ≠90°) к нему, то за счет проекции горизонтальной составляющей vt, h тангенциальной скорости vt колеса 4 на направление измерительного луча измеряется дополнительная горизонтальная составляющая скорости, которая для определенной высоты h, h1 линии сканирования 17 соответственно постоянная и выражается в смещении идеализированной характеристики 18 принятых частот и реальной характеристики 20 их смеси на фиг.4. На фиг.7 это показано для идеализированной характеристики 18 принятых частот на фиг.4, а приведенная ниже таблица отображает значения β и γ (в градусах) для примеров на фиг.7a-7g.
Зная скорость v, измеряемую датчиком 10 или самим прибором 8, можно скорректировать или компенсировать характеристики 18 и 20 на соответствующую, обусловленную скоростью долю vt, h, что соответствует компенсации смещения на фиг.7a-7g и снова возвращает к показанным на фиг.4 характеристике смеси принятых частот и зеркальной к ней вокруг временной оси t.
На фиг.8 показано измерение временного окна TF прохождения всего автомобиля 1 мимо прибора 8 или измерительного луча 9, предпочтительно с помощью отдельного датчика присутствия 11. Им также может быть, например, радар или лидар, который посылает свой измерительный луч 12 на проходящий автомобиль 1, чтобы измерить продолжительность TF его прохождения и соотнести с нею записанную характеристику 20 смеси принятых частот.
На фиг.8 в целях сравнения измерительный луч 9 направлен исключительно на кузов 5 автомобиля 1, а именно под углом γ≠90°, т.е. наискось к направлению движения 3, так что относительная скорость v при прохождении TF автомобиля измеряется как прямоугольный частотный скачок, расширенный до смеси F принятых частот в полосе 23, которая вызвана исключительно обусловленным геометрией воронкообразным расширением измерительного луча 9 на фиг.6.
Поз. 24 обозначена возникающая вне прохождения TF автомобиля паразитная доля принятого лидаром/радаром 8 сигнала. Зная временное окно TF прохождения можно, тем самым, взять из характеристики 20 временное окно TF прохождения непосредственно предшествующий ему отрезок 25 или непосредственно последующий отрезок 26 и определить в них паразитную долю 24; она может быть использована для компенсации ею характеристики 20. Например, можно провести анализ возникающих на отрезках 25, 26 принятых частот и аннулировать их, например вычесть, из смесей F принятых частот при прохождении TF автомобиля.
Предпочтительно для этого используется только предшествующий прохождению TF автомобиля отрезок 25, поскольку автомобиль 1 мог бы иметь, например, прицеп, который иначе на последующем отрезке 26 мог быть привлечен ошибочным образом в качестве паразитного сигнала.
Далее определение временного окна TF прохождения может использоваться для того, чтобы отнести все колеса 4, обнаруживаемые во временном окне TF прохождения, к одному и тому же автомобилю 1, что можно соответственно вычислить с помощью блока обработки 14 устройства 7.
Временное окно TF прохождения может определяться не отдельным датчиком присутствия 11, а непосредственно лидаром/радаром 8, т.е. одним и тем же измерительным лучом 9. Если измерительный луч 9 направлен к автомобилю 1 под углом γ≠90° (как на фиг.8), то временное окно TF прохождения можно определить, например, с помощью скачков 27, 28 частоты полосы 23 и/или по возникновению обусловленного геометрией частотного расширения в характеристике 20.
Определить относительную скорость v автомобиля 1 можно не отдельным датчиком 10, а, например, самим лидаром/радаром 8, например с помощью величины скачков 27, 28 частоты полосы 23.
На фиг.9 изображены два примера характеристик 20 смесей принятых частот после их корректировки, с одной стороны, на объясняемые собственной скоростью v автомобиля 1 составляющие, а с другой стороны, на доли 24 паразитных сигналов, полученные из предшествующего отрезка 25. Слева на фиг.9 видно возникновение непрерывно возрастающей полосы 22 в характеристике 20, указывающей колесо 4, в случае небольшой зоны падения 16. Справа на фиг.9 показана та же ситуация, когда зона падения 16′ измерительного луча 9 на колесе 4 больше половины его диаметра, так что измерительный луч 9 в определенные моменты времени измеряет одновременно существенные положительные и отрицательные вертикальные составляющие vt, h колеса 4. Это приводит к близкому «сращиванию» начальных и конечных пиков характеристики 20, т.е. к более крутому возрастанию и убыванию 18.
Устройство 7 может быть реализовано как мобильным, например установлено на автомобиле 6, так и стационарным, например с использованием существующей дорожной радиоинфраструктуры и WAVE- или DSRC-радиомаяков системы взимания дорожного сбора или WLAN-радиомаяков дорожной Интернет-инфраструктуры. За счет этого уже имеющиеся передающие части WLAN-, WAVE- или DSRC-радиомаяков можно использовать в качестве передающих частей допплеровского радара 8; точно так же принимающие части радиомаяков можно использовать в качестве принимающих частей допплеровского радара 8 или, по меньшей мере, интегрировать их в принимающие части радиомаяков. Устройство и способ, согласно изобретению, могут быть реализованы, таким образом, например, в виде программного приложения в традиционном мобильном или стационарном WLAN-, WAVE- или DSRC-контрольном устройстве или радиомаяке.
До сих пор специалисты исходили из того, что передаваемая частота лидара/радара 8 или измерительного луча 9 постоянная, т.е. временная характеристика является постоянной. Однако возможно также, чтобы прибор 8 посылал измерительный луч 9 с непостоянной по времени характеристикой передаваемой частоты, например в случае методов частотных скачков, в которых частота постоянно изменяется по заданному или известному образцу. Записанные характеристики 18, 20 записываются относительно заранее известной временной характеристики передаваемой частоты измерительного луча 9, будь она постоянная или переменная, т.е. привязывается к ней или нормируется по ней, так что можно компенсировать эффект известных характеристик передаваемых частот.
Изобретение не ограничено описанными вариантами его осуществления, а включает в себя любые варианты и модификации, не выходящие за рамки нижеследующей формулы изобретения.
Изобретение относится к способу и устройству обнаружения вращающегося колеса транспортного средства, которое движется по проезжей части в направлении движения и колеса которого, по меньшей мере, частично открыты сбоку. Техническим результатом является повышение надежности обнаружения вращающегося колеса транспортного средства. Предложен способ обнаружения вращающегося колеса (4) транспортного средства (1), которое движется по проезжей части (2) в направлении движения (3) и колеса (4) которого, по меньшей мере, частично открыты сбоку, включающий этапы: отправку электромагнитного измерительного луча (9) с известной временной характеристикой его частоты на первую область над проезжей частью (2) в направлении наискось к вертикали (V) и перпендикулярно или наискось к направлению движения (3), прием отраженного измерительного луча (9) и запись временной характеристики его частот по отношению к известной характеристике в качестве характеристики (20) смеси принятых частот и обнаружение непрерывно возрастающей или убывающей в течение отрезка времени полосы (22) частот в характеристике (20) смеси принятых частот в качестве колеса (4). 2 н. и 13 з.п. ф-лы, 9 ил.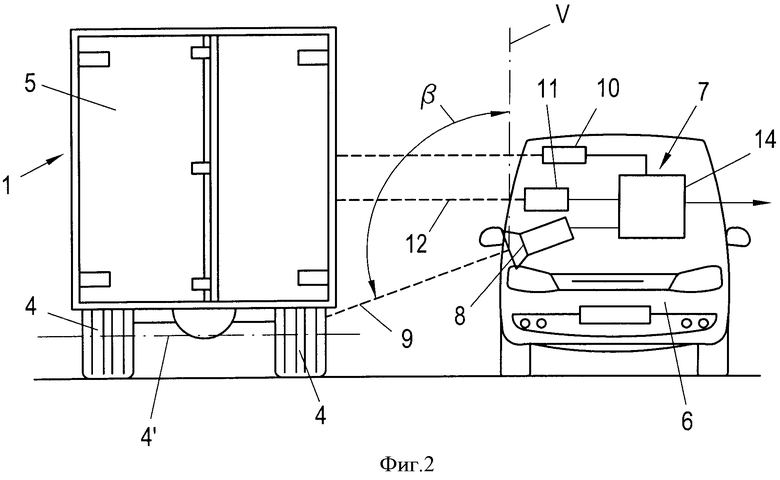
1. Способ обнаружения вращающегося колеса (4) транспортного средства (1), которое движется по проезжей части (2) в направлении движения (3) и колеса (4) которого, по меньшей мере, частично открыты сбоку, отличающийся тем, что он содержит следующие этапы:
- направляют электромагнитный измерительный луч (9) с известной временной характеристикой его частоты на первую область над проезжей частью (2) в наклонном направлении к вертикали (V) и перпендикулярно или наклонно к направлению движения (3);
- принимают отраженный измерительный луч (9) и записывают временную характеристику его частот по отношению к известной характеристике в качестве характеристики (20) смеси принятых частот;
- обнаруживают непрерывно возрастающую или убывающую в течение отрезка времени полосу (22) частот в характеристике (20) смеси принятых частот в качестве колеса (4).
2. Способ по п.1, отличающийся тем, что обнаружение осуществляют посредством обработки характеристики среднего значения (18) частоты полосы (22).
3. Способ по п.1, отличающийся тем, что обнаружение осуществляют посредством контроля того, попадает ли полоса (22) в заданный контур (22') в плоскости частота/время.
4. Способ по любому из пп.1-3, отличающийся тем, что измерительный луч (9) направляют перпендикулярно направлению движения (3) под наклоном снизу.
5. Способ по любому из пп.1-3, отличающийся тем, что он содержит следующие этапы:
- измеряют скорость (v) кузова (5) транспортного средства (1) относительно места отправки измерительного луча (9) и приема отраженного измерительного луча (9);
- выполняют компенсацию характеристики (20) смеси принятых частот на частотные доли, вызванные скоростью (v) кузова, прежде чем будет осуществлен этап обнаружения полосы (22).
6. Способ по любому из пп.1-3, отличающийся тем, что он содержит этап обнаружения присутствия части (5) кузова транспортного средства (1) в лежащей над первой областью второй области во временной характеристике в качестве временного окна (TF) прохождения, причем обнаружение колеса (4) в характеристике (20) смеси принятых частот осуществляют только во временном окне (TF) прохождения.
7. Способ по п.6, отличающийся тем, что он содержит следующие этапы:
- определяют доли (24) паразитных сигналов на непосредственно предшествующем временному окну (TF) прохождения отрезке (25) характеристики смеси принятых частот;
- выполняют компенсацию характеристики (20) смеси принятых частот во временном окне (TF) прохождения на долю (24) паразитных сигналов, прежде чем будет осуществлен этап обнаружения полосы (22).
8. Способ по п.6, отличающийся тем, что колеса (4), обнаруживаемые в одном и том же временном окне (TF) прохождения, относят к одному и тому же транспортному средству (1).
9. Способ по любому из пп.1-3, отличающийся тем, что измерительный луч (9) имеет зону падения (16, 16′, 16”), диаметр которой меньше обнаруживаемого колеса, предпочтительно меньше 10 см, особенно предпочтительно меньше 5 см.
10. Способ по любому из пп.1-3, отличающийся тем, что измерительный луч (9) является посылаемым направленной антенной лучом радара, предпочтительно в частотном диапазоне свыше 70 ГГц.
11. Устройство для обнаружения вращающегося колеса (4) транспортного средства (1), движущегося по проезжей части (2) в направлении движения (3) и колеса (4) которого, по меньшей мере, частично открыты сбоку, отличающееся тем, что оно содержит:
- допплеровский лидар или радар (8), выполненный с возможностью отправки электромагнитного измерительного луча (9) с известной временной характеристикой его частоты под наклоном к вертикали (V) и перпендикулярно или под наклоном к направлению движения (3) на цель над проезжей частью (2) и записи временной характеристики частот отраженного от цели измерительного луча относительно известной характеристики в качестве характеристики (20) смеси принятых частот;
- расположенный за ним блок обработки (14), выполненный с возможностью обнаружения непрерывно убывающей или возрастающей в течение отрезка времени полосы (22) частот в характеристике (20) смеси принятых частот в качестве колеса (4).
12. Устройство по п.11, отличающееся тем, что оно содержит соединенный с блоком обработки (14) датчик (10) для измерения скорости (v) кузова (5) транспортного средства (1), причем блок обработки (14) выполнен с возможностью компенсации характеристики (20) смеси принятых частот на частотные доли, вызванные скоростью (v) кузова (5).
13. Устройство по п.11 или 12, отличающееся тем, что оно содержит соединенный с блоком обработки (14) датчик (11), выполненный с возможностью обнаружения присутствия части (5) кузова транспортного средства (1) выше области, на которую направлен измерительный луч (9), во временной характеристике в качестве временного окна (TF) прохождения, причем блок обработки (14) выполнен с возможностью обнаружения колеса (4) в характеристике (20) смеси принятых частот только во временном окне (TF) прохождения.
14. Устройство по п.13, отличающееся тем, что блок обработки (14) выполнен с возможностью определения доли (24) паразитных сигналов на непосредственно предшествующем временному окну (TF) прохождения отрезке (25) характеристики (20) смеси принятых частот и компенсации характеристики (20) смеси принятых частот во временном окне (TF) прохождения на долю (24) паразитных сигналов.
15. Устройство по п.11 или 12, отличающееся тем, что допплеровский лидар или радар (8) установлен на мобильной платформе (6), предпочтительно на контрольном транспортном средстве.
| DE 102008037233 A1, 2010-03-25 | |||
| US 2005235744 A1, 2005-10-27 | |||
| DE 19928624 A1, 2001-01-11 | |||
| EP 1097076 A1, 2001-05-09 | |||
| УСТРОЙСТВО ФИКСАЦИИ ПРОХОЖДЕНИЯ КОЛЕСНОЙ ПАРЫ | 2008 |
|
RU2379209C1 |

