Настоящее изобретение относится к устройствам для обнаружения нарушений дорожного движения, содержащим средство для измерения скорости движения транспортного средства и соединенное с ним средство для фиксации изображения транспортного средства.
Уровень техники
Устройства этого типа применяются обычно как в неподвижных, так и в подвижных установках для обнаружения движения с превышением скорости или других нарушений на участках дороги или автострады. Скорость обычно измеряется лазерной системой, использующей два параллельных луча, разнесенных на известное расстояние один от другого, которые пересекаются движущимся транспортным средством и, следовательно, перекрываются им. Так как расстояние между лучами известно, продолжительность времени, которое проходит между перекрыванием первого луча и перекрыванием второго луча, дает возможность вычислить скорость. Система управления, соединенная с лазерным преобразователем, управляет фотокамерой, наведенной в нужном направлении, для получения изображения транспортного средства, которое движется с большей скоростью, чем предельная скорость, принятая на участке, где установлено контролирующее устройство. Система является регулируемой для того, чтобы обеспечить использование ее на участках с различными ограничениями скоростей.
Пример определителя скорости транспортного средства лазерного типа раскрыт, например, в патенте США N 4902889, содержание которого должно быть принято во внимание, как включенное в настоящее описание.
Традиционные системы имеют серьезный недостаток, заключающийся в том, что когда их используют на многополосных проезжих частях, фиксирующие изображение устройства не могут быть точно наведены. Они должны, следовательно, иметь достаточно широкий угол зрения и удовлетворительную разрешающую способность по всему полю зрения для того, чтобы снять полную ширину проезжей части на один кадр. Это возможно для фотокамеры, но фактически невозможно для видеокамеры. Фотокамера также требует большей глубины резкости, поскольку промежуток времени между моментом, когда измеряется скорость, и моментом, когда производится съемка изображения, установлен одной и той же величины независимо от поперечного положения транспортного средства на проезжей части, т. е. независимо от полосы движения, по которой движется транспортное средство. Промежуток времени можно, если требуется, вычислить как функцию измеряемой скорости, но не поперечного положения транспортного средства, что означает, что изображение обычно получается, когда транспортное средство (при любой его скорости) находится в пределах определенной зоны проезжей части. Расстояние между фокальной плоскостью и номерным знаком транспортного средства изменяется в зависимости от поперечного положения транспортного средства относительно проезжей части. Следовательно, для того, чтобы обеспечить нахождение изображения всегда в фокусе оптической системы, средство для воспроизведения изображения должно иметь достаточную глубину резкости. Это требует больших стоимостных затрат.
Цели изобретения
Целью изобретения является обеспечение устройства типа описанного выше, которое не имеет недостатков и ограничений, присущих традиционным устройствам.
Более конкретно, одна часть настоящего изобретения состоит в обеспечении устройства, которое может быть использовано с камерами с низкой разрешающей способностью и поэтому имеющими малый угол зрения, и которое может, в частности, быть использовано с недорогими видеокамерами.
Другая цель настоящего изобретения состоит в обеспечении устройства, которое может быть использовано с камерами, имеющими ограниченную глубину резкости.
Еще одна цель усовершенствованного варианта осуществления настоящего изобретения состоит в том, чтобы обеспечить систему, способную контролировать многополосную проезжую часть, используя одну камеру.
Краткое изложение сущности изобретения
Эти и другие цели изобретения и его преимущества, очевидные специалистам в этой области техники из нижеследующего текста, достигаются в основном путем использования средства для обнаружения поперечного положения транспортного средства на указанной проезжей части, причем управление камерами осуществляется как функция от указанного поперечного положения. Таким образом, даже при использовании фотокамеры или видеокамеры с узким углом зрения, возможно контролировать широкую проезжую часть, разделенную на много полос. Теоретически возможно использовать множество блоков камер, ориентированных в различных направлениях, и изображение может быть фиксировано одним или другим из них, в зависимости от определенного поперечного положения. Однако более перспективно использовать один блок камеры, который ориентируется так и тогда, как и когда потребуется, путем поворота самого блока или, что более перспективно, путем поворота системы отражающих зеркал. Это, упомянутое последним, решение уменьшает движущиеся массы и, следовательно, инерцию, таким образом достигаются более высокие скорости управления.
Устройство может быть также использовано в сочетании с камерами, которые фиксируют изображение всей ширины проезжей части. В этом случае управление кадром подразумевает в известном смысле, что механизм может идентифицировать положение транспортного средства внутри кадра с тем, чтобы различать, например, если несколько транспортных средств движутся параллельно и фиксированы в одном и том же кадре, какой автомобиль совершил нарушение, и, если требуется, дать указание на это действие на изображении.
С целью измерения скорости движения транспортного средства возможно, как известно, использовать лазерный преобразователь, который испускает и принимает по меньшей мере два взаимно параллельных лазерных луча. Скорость вычисляется как функция продолжительности времени, которое проходит между перекрыванием первого лазерного луча и перекрыванием второго лазерного луча указанным транспортным средством. Третий лазерный луч, который наклонен под известным углом к первым двум лазерным лучам, дает возможность определить поперечное положение как функцию указанного угла, скорости транспортного средства и продолжительности времени, которое проходит между перекрыванием первого из указанных по меньшей мере двух параллельных лазерных лучей и перекрыванием указанного третьего лазерного луча.
Другие альтернативные, хотя возможно и менее предпочтительные системы, могут также быть использованы для определения поперечного положения транспортного средства, некоторые из них описаны ниже.
Изобретение также относится к способу обнаружения нарушений, в котором определяются не только скорость транспортного средства, но также его поперечное положение на проезжей части для того, чтобы управлять углом, под которым фиксируется изображение транспортного средства. Конкретные признаки и варианты осуществления способа в соответствии с изобретением раскрыты в прилагаемых пунктах формулы изобретения.
Другие предпочтительные признаки и варианты осуществления изобретения указаны в зависимых пунктах формулы изобретения.
Краткое описание чертежей
Лучше понять изобретение можно из описания и приложенных чертежей, причем на последних показаны практические, неограничительные варианты осуществления изобретения. На чертежах фиг. 1-5 схематически показаны различные варианты осуществления устройства в соответствии с изобретением.
Подробное описание изобретения
На фиг. 1 схематически изображен вид сверху участка многополосной проезжей части C1, C2, C3 типа проезжей части магистрали. Вдоль одной из полос (например, средней полосы C2) транспортное средство V движется со скоростью v, которую требуется измерить. С одной стороны от проезжей части размещено лазерное устройство, обозначенное в целом позицией 1, которое испускает по меньшей мере два взаимно параллельных лазерных луча F1 и F2, разнесенные на расстояние D и ориентированные поперек направления движения вдоль проезжей части. По мере того, как транспортное средство движется со скоростью v, его передняя часть последовательно пересекает два лазерных луча F1 и F2, и продолжительность времени T2, которое проходит между перекрыванием первого луча и перекрыванием второго луча, дает возможность вычислить величину скорости v, так как расстояние D известно. Вычисленная величина скорости v передается на центральный контрольный блок, схематически обозначенный как 3, который посылает командный сигнал на блок камеры 5 для получения фотографического или видеоизображения, т.е. на фотокамеру, видеокамеру или тому подобное. Блок камеры 5 задействуют, когда вычисленное значение скорости v превышает выбираемый предел и таким образом фиксирует изображение транспортного средства V, которое превысило предельную скорость.
Сигнал, задействующий камеру 5, может быть послан после задержки по времени, которая является функцией скорости v, так что изображение фиксируется, когда транспортное средство V достигает определенной зоны P полосы, которая определяется таким образом, что среднее расстояние транспортного средства V от фокальной плоскости блока камеры 5 являлось таким, чтобы получить сфокусированное изображение. Как очевидно из диаграммы на фиг. 1, если зона P проезжей части, на которой находится транспортное средство, когда блок камеры 5 снимает его изображение, фиксировано, фактическое расстояние от транспортного средства V до фокальной плоскости блока камеры 5 будет в значительной степени изменяться в зависимости от того, на какой полосе C1, C2 или C3 находится транспортное средство. При этом требуется использовать оптические системы с относительно большой глубиной резкости, а такие системы являются дорогостоящими.
Кроме того, с целью наблюдения за всей проезжей частью требуется оптическая система с очень широким углом зрения, которая не совместима с камерами с низкой разрешающей способностью.
Фотография может быть снята как сзади (как на диаграмме, показанной на фиг. 1), так и спереди путем размещения блока камеры 5 на гораздо большем расстоянии, чем устройство 1, и наведения его в противоположном направлении, т.е. в том направлении, откуда приближается транспортное средство.
Как изложено ранее, описанное устройство работает таким же образом, что и известные традиционные системы.
В соответствии с изобретением устройство дополнительно обеспечено средством для определения положения транспортного средства V поперек ширины проезжей части для того, чтобы узнать, на какой полосе C1, C2 или C3 находится транспортное средство. В показанном на фиг. 1 варианте осуществления это выполняется с помощью по меньшей мере третьего лазерного луча F3, наклоненного под углом (A) относительно луча F1. Передняя часть транспортного средства V пересекает луч F3 перед тем, как она встречается с лучами F1 и F2, и таким образом вырабатывается третий сигнал. Продолжительность времени T1, проходящего между тем, как перекрывается текущий луч F3 и перекрывается текущий луч F1, зависит не только от скорости v, с которой движется транспортное средство, но также от его поперечного положения на проезжей части. Расстояние d между устройством 1 и передней частью транспортного средства V (или, более точно, точкой транспортного средства V, которая первой пересекает луч F3) выражается уравнением
d = T1 v•tg A.
При известном параметре d центральный блок 3 может управлять блоком камеры 5 таким образом, чтобы направлять его угол зрения (B) на полосы C1, C2 или C3, или в промежуточное положение, где находится транспортное средство, путем ориентирования его вокруг вертикальной оси. Таким образом, возможно использовать блок камеры 5 с очень узким углом зрения (B), который будет поэтому относительно недорогим. Альтернативно, может быть установлено множество блоков камер 5 с ограниченным углом зрения, ориентированных под различными углами, причем в этом случае центральный блок 3 будет приводить в действие один или другой из указанных блоков камер в зависимости от вычисленного расстояния d.
Эта возможность, предоставленная путем вычисления расстояния d, особенно выгодна, когда желательно зафиксировать изображение при помощи недорогой видеокамеры, а не фотокамеры, поскольку видеокамеры имеют низкое разрешение и поэтому более ограниченный угол зрения.
Описанная система также целесообразна в сочетании с камерами, имеющими высокое разрешение и, следовательно, широкий угол зрения. В этом варианте вычисление расстояния (и, следовательно, поперечного положения транспортного средства на проезжей части) делает возможным идентифицировать, какое транспортное средство совершило нарушение, даже если несколько транспортных средств появится на параллельных полосах на одном и том же изображении.
На фиг. 2 схематически показано решение, эквивалентное решению на фиг. 1, где третий лазерный луч F3 расположен ниже от лучей F1 и F2. Идентичные или соответствующие части обозначены аналогичными позициями. Также возможно использовать два или более наклонных луча выше и/или ниже от лучей F1, F2, которые могут, например, производить более чем одно измерение того же транспортного средства.
Что касается блока камеры 5, на фиг. 2 показан вариант осуществления, в котором использован один неподвижный блок камеры 5 и два зеркала 7, 9, расположенные перед линзой блока 5. Зеркало 7 неподвижно, а зеркало 9 может быть повернуто вокруг вертикальной оси. Посредством этого угол зрения блока камеры 5 изменяется путем управления положением зеркала 9, причем блок камеры 5 остается неподвижным. Очевидно, что это решение может также быть использовано в примере, показанном на фиг. 1. В общем, нижеследующее может быть принято как удовлетворяющее определенным требованиям в каждом из примеров, показанных как альтернативы: множество различно ориентированных блоков камер, ориентируемый блок, неподвижный блок с ориентируемым зеркалом или блок с высокой разрешающей способностью.
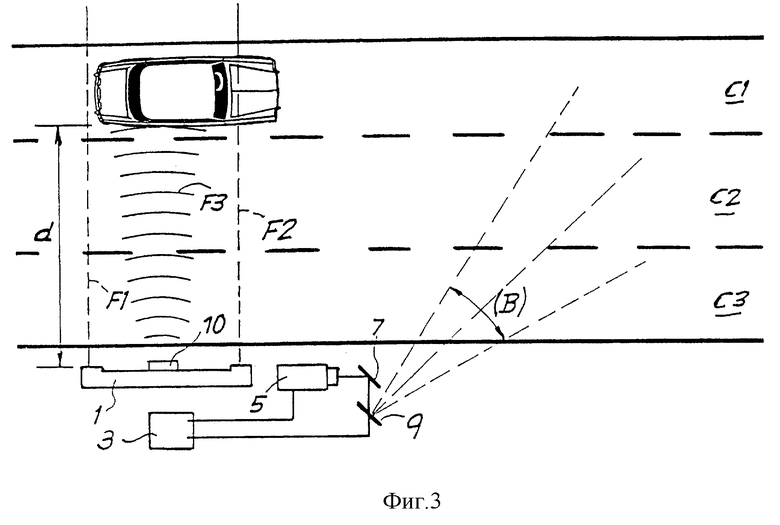
На фиг. 3 показан другой вариант осуществления изобретения, в котором расстояние D между транспортным средством V и устройством 1 определяется посредством луча электромагнитного излучения F3 или звуковых волн, испускаемых излучающим/принимающим средством 10 (известным само по себе), отраженных от борта транспортного средства V и принятых средством 10. Расстояние D вычисляется в этом случае по продолжительности времени, которое требуется фронту волны, чтобы завершить прямое и обратное прохождение. Стоимость этой системы выше, чем стоимость системы, в которой используют наклоненный третий лазерный луч.
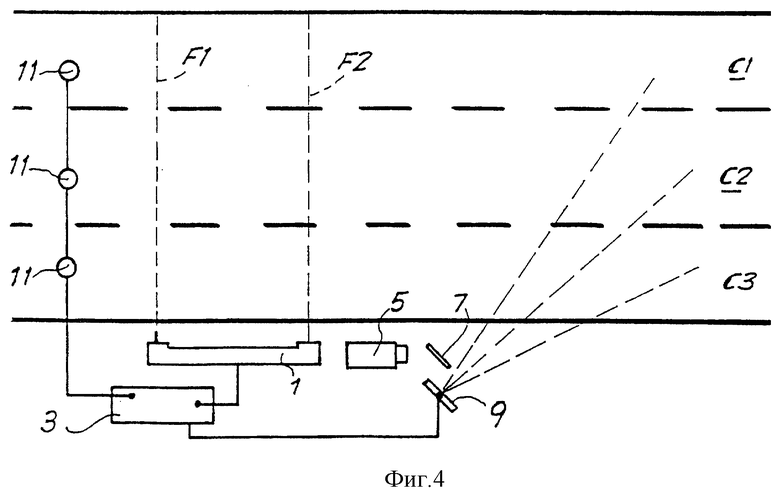
На фиг. 4 показан другой вариант осуществления, в котором использована система измерительных преобразователей 11, расположенных поперечно проезжей части. Возможными примерами того, как это может быть использовано, являются магнитные позиционные измерительные преобразователи, чувствительные к перемещению массы металла передвигающегося транспортного средства или другие системы, которые могут обнаруживать движение транспортного средства. Части, идентичные или соответствующие представленным в предыдущих вариантах осуществления, обозначены теми же позициями.
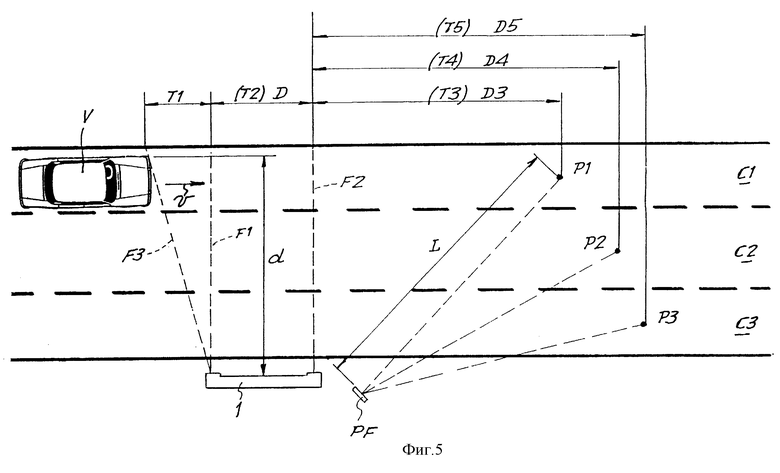
На фиг. 5 показано, как в системе в соответствии с изобретением может быть также предусмотрена лучшая фокусировка при более ограниченной глубине резкости, чем в блоке камеры 5. В то время как в традиционных системах изображение фиксируется, как только транспортное средство V проходит через зону P (фиг. 1) проезжей части, не учитывая поперечное положение транспортного средства, т. е. того, по какой полосе C1, C2 или C3 оно движется, с помощью системы в соответствии с изобретением возможно вычислить промежуток времени между определением скорости и фиксацией изображения как функцию поперечного положения транспортного средства, так как номерной знак всегда находится приблизительно на одном расстоянии от фокальной плоскости блока камеры 5, независимо от того, по какой полосе C1, C2 или C3 движется транспортное средство. На фиг. 5 схематически показана фокальная плоскость PF блока камеры 5. L обозначает расстояние, на котором объект, который подлежит фотографированию, находится точно в фокусе фокальной плоскости PF. P1, P2 и P3 являются точками, в которых транспортное средство V должно находиться для получения сфокусированного изображения в зависимости от того, движется ли транспортное средство по полосе C1, C2 или C3. Три точки P1, P2 или P3 находятся на расстоянии D3, D4 и D5 соответственно от поперечной линии, очерченной лучом F2. Эти расстояния соответствуют времени движения T3, T4 и T5, которые зависят от скорости v движения транспортного средства V.
Следовательно, когда скорость v и расстояние d для транспортного средства V определены, можно вычислить, какой промежуток времени (T3, T4 или T5) необходим перед тем, как изображение будет зафиксировано, чтобы последнее было точно в фокусе.
Очевидно, что на чертежах представлены примеры, которые приведены исключительно как практическая демонстрация изобретения, причем имеется возможность изменять указанное изобретение в том, что касается форм и размещений, не выходя при этом за пределы основной концепции изобретения. Наличие номеров позиций в прилагаемых пунктах формулы изобретения имеет целью облегчить чтение формулы изобретения со ссылкой на описание и чертежи и не ограничивает объем охраны, представленный в пунктах формулы изобретения.

Изобретение относится к устройствам для обнаружения нарушений дорожного движения. Технический результат заключается в повышении точности при использовании на многополосных дорогах или автострадах. Устройство для обнаружения нарушений дорожного движения содержит средство для измерения скорости движения транспортного средства вдоль проезжей части и соединенное с ним средство камеры для фиксации изображения транспортного средства. Предусмотрены также средства для определения поперечного положения транспортного средства на указанной проезжей части. Управление камерами осуществляется как функция от указанного поперечного положения. 2 с. и 13 з.п. ф-лы, 5 ил.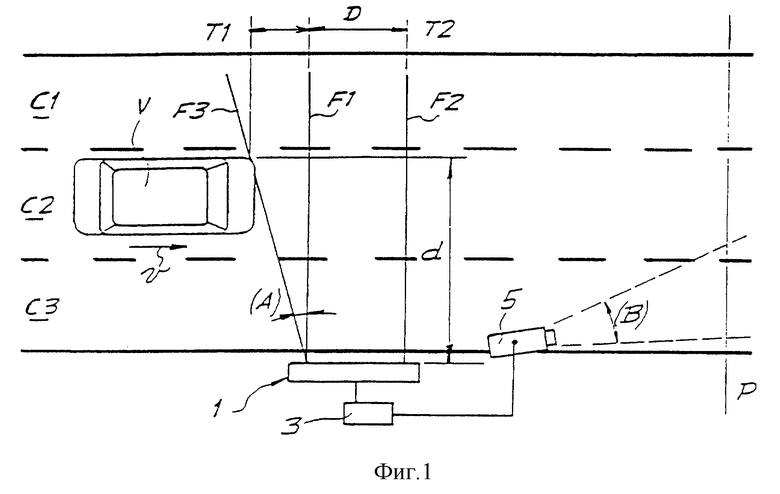
| DE 3908785 A1, 27.09.1990 | |||
| Телевизионное устройство для контроля движения транспортных средств | 1983 |
|
SU1235002A1 |
| Автооператор | 1977 |
|
SU621573A1 |
| DE 4235232 A1, 21.04.1994. | |||

