Изобретение относится к машиностроению, а именно к устройствам имитации подвижных воздушных объектов при подготовке специалистов противовоздушной обороны (ПВО), испытаниях и оценке эффективности боевой техники ПВО.
Известно, что при боевой подготовке специалистов ПВО и при проведении испытаний боевой техники ПВО для имитации воздушных целей широко применяются воздушные аэродинамические и ракето-мишени [1; 2]. Эффективность и целесообразность использования воздушной мишени определяется уровнем подобия воздушной мишени по геометрическим (форма, размеры, характерные компоновочные решения), кинематическим (траектории движения, производные линейных и угловых скоростей), излучательным (лазерное, тепловое, радиоизлучение) и отражательным (эффективная поверхность рассеяния, светопоглощение) показателям имитируемому воздушному объекту: самолет, вертолет и т.п.
Горизонтальный полет вертолета, в большинстве случаев, может имитироваться воздушными аэродинамическими мишенями самолетного типа. Однако имитация вертолета на режимах вертикальных взлета и посадки требует применения специализированной воздушной мишени. Воздушная мишень, в общем, является одноразовым техническим устройством или техническим устройством с малым эксплуатационным ресурсом. Требование по снижению стоимости стандартной воздушной мишени, имитирующей вертолет, приводит к конструктивно-компоновочным, энергетическим и организационным сложностям, не позволяющим повысить уровень ее пригодности для всей номенклатуры боевых средств ПВО.
Предшествующий уровень техники.
Известна вертикально взлетающая мишень имитатора вертолета (Патент на полезную модель 80547. РФ, МПК F41J 9/00 [6]), включающая подъемный аппарат, содержащий скрепленные между собой обечайки, в каждой из которых размещается винтомоторная установка с электрическим двигателем и воздушным винтом, раму на которой смонтированы источники питания, поднимаемое бортовое и специальное оборудование, позволяющее обеспечить функционирование мишени и имитацию отражательных и излучательных показателей имитируемого вертолета. Недостатком этого технического решения является принципиальная невозможность обеспечить требуемый уровень подобия воздушной мишени по геометрическим, кинематическим, излучательным и отражательным показателям.
Известна мишень имитатор вертолета полигонного комплекса для испытаний боевого снаряжения сухопутных войск (Патент на изобретение 2583864, РФ, МПК F41J 2/02 [4]), включающая в себя раму, устройство для подъема рамы в плоскости, перпендикулярной направлению стрельбы, привод, имитатор теплового излучения вертолета, дистанционный пульт управления, стабилизирующее устройство продольной и поперечной устойчивости. Недостатком этого аналога является ориентация применения для испытаний боевого снаряжения, что накладывает ограничения как на располагаемую высоту подъема мишени (ограничена размерами конструкции), так и на возможности имитации геометрических, кинематических и отражательных показателей вертолета.
Наиболее близким аналогом является взлетная мишень имитатора вертолета (Патент на полезную модель 77412, РФ, МПК F41J 9/08 [5]), включающая подъемный аппарат многоразового использования, мишень имитатора вертолета, стартовую платформу с лебедкой и дистанционный пульт управления. Недостатками этого технического решения является принципиальная невозможность обеспечить требуемый уровень подобия воздушной мишени по геометрическим, кинематическим, излучательным и отражательным показателям, высокая сложность серийной эксплуатации. Разделение воздушного имитатора вертолета на подъемный аппарат и подвесную мишень мишень имитатора вертолета нарушает принцип целостности визуального облика с радиолокационным, что не позволяет использовать эту мишень для всей номенклатуры боевых средств ПВО.
Задачей изобретения является разработка привязного воздушного имитатора вертолета (далее ПВИВ), который должен обеспечивать имитацию геометрических, кинематических, излучательных и отражательных показателей вертолета на режимах вертикальных взлета и посадки, висения на заданной высоте в пределах заданной площадки.
Сущностью изобретения является привязной воздушный имитатор вертолета, включающий фюзеляж, несущий воздушный винт, хвостовую балку с рулевым воздушным винтом, систему автоматического управления, силовую установку с редуктором и систему швартовки. Фюзеляж упомянутого привязного воздушного имитатора вертолета выполняется в виде ферменной конструкции. Все бортовое оборудование размещается в фюзеляже. Шасси выполняется в виде опор, которые являются частью фермы фюзеляжа. Эффективная поверхность рассеяния (ЭПР, [3]) формируется несущим и рулевым воздушными винтами, конструкцией фюзеляжа и металлизированной сеткой, которая образует геометрические обводы фюзеляжа. Для имитации ЭПР несущего и хвостового винтов лопасти воздушных винтов имеют специально ориентированные радиоотражающие металлические закладные элементы. Система управления упомянутого ПВИВ выполняется разнесенной: датчики, исполнительные устройства и радиомодем приема управляющих сигналов и передачи данных от датчиков размещаются в фюзеляже. Вычислительный блок, радиомодем приема данных от датчиков и передачи управляющих сигналов, а также датчики системы контроля координат упомянутого ПВИВ размещаются на наземном швартовочном устройстве, которое удерживает упомянутый ПВИВ при помощи троса в пределах заданной площадки.
Перечень фигур чертежей
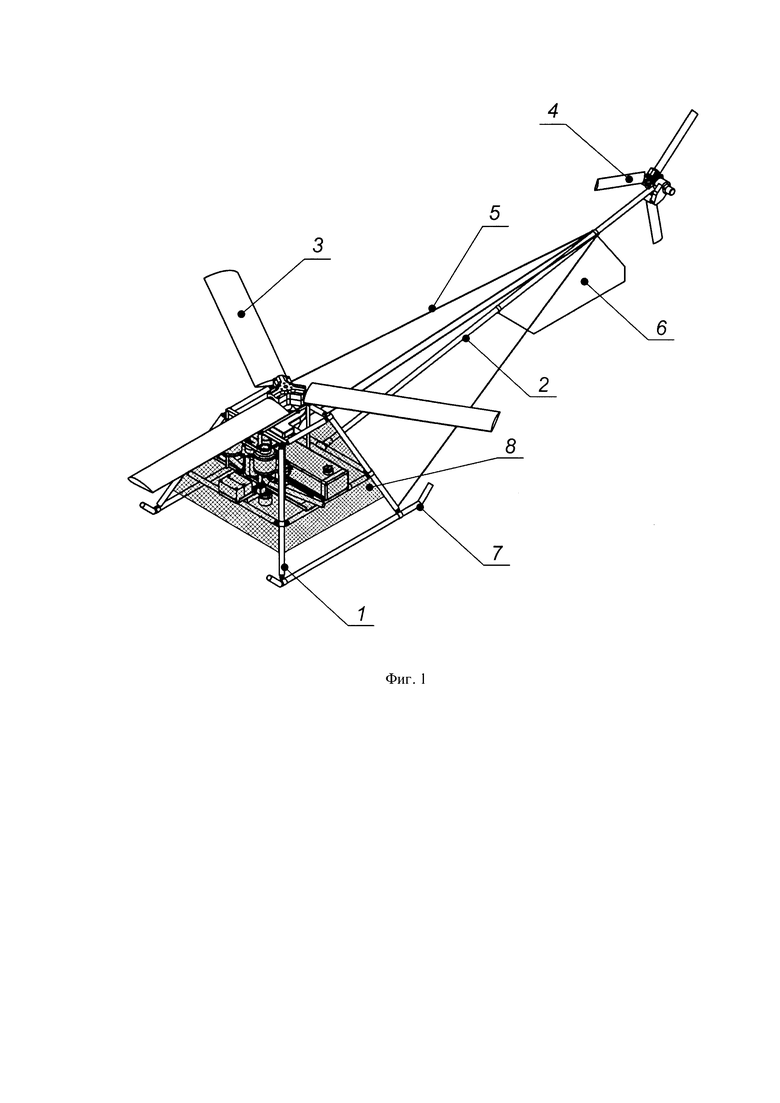
Фиг. 1 - привязной воздушный имитатор вертолета, вид 3/4,
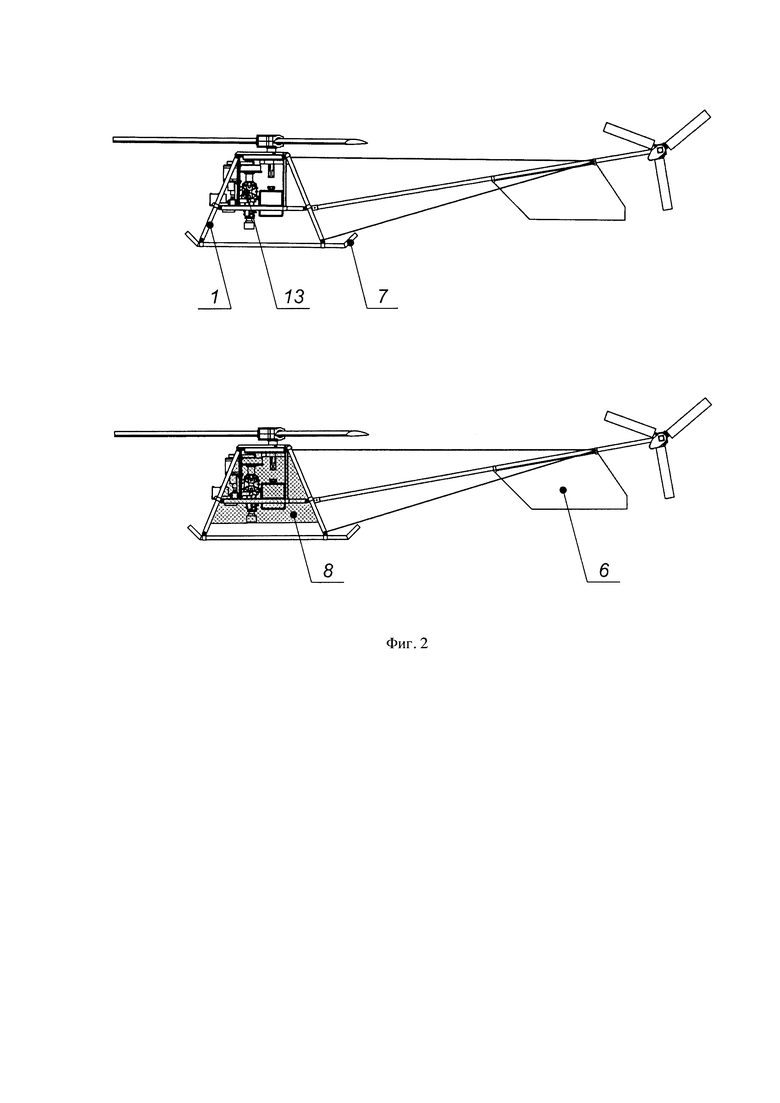
Фиг. 2 - компоновка привязного воздушного имитатора вертолета,
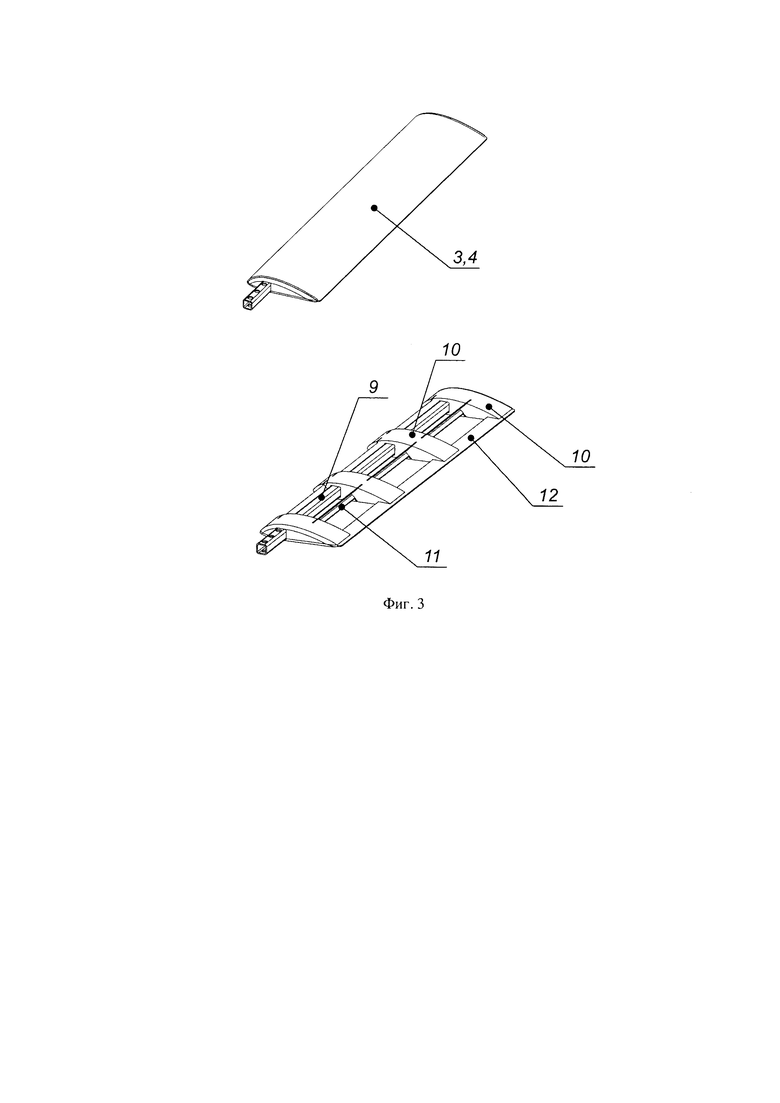
Фиг. 3 - лопасть воздушного винта привязного воздушного имитатора вертолета,
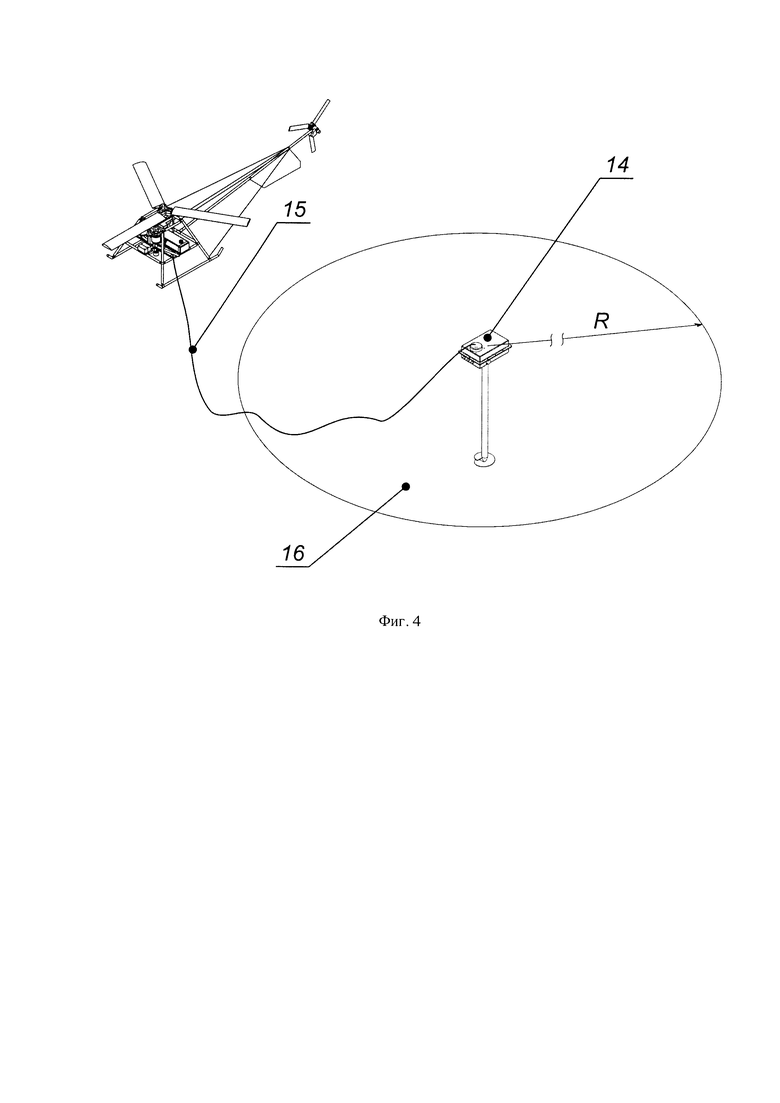
Фиг. 4 - размещение привязного воздушного имитатора вертолета при применении,
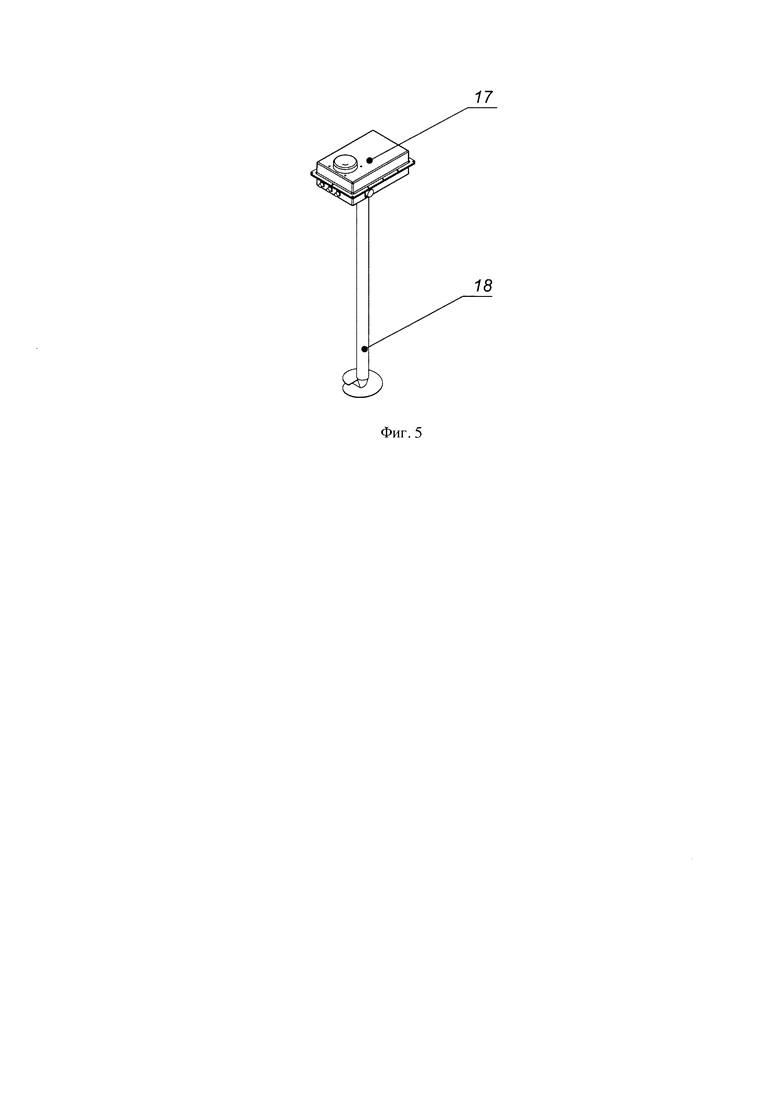
Фиг. 5 - швартовочное устройство привязного воздушного имитатора вертолета.
ПВИВ выполнен по одновинтовой схеме с хвостовым винтом (фиг. 1). Фюзеляж 1 состоит из стержневой фермы, к которой шарнирно прикрепляется хвостовая балка 2, удерживающаяся в необходимом положении с помощью тросовых растяжек 5. В верхней части фермы установлен несущий воздушный винт 3. Воздушный винт приводится во вращение силовой установкой с редуктором. Хвостовая балка 2 оканчивается рулевым воздушным винтом 4. Мощность для рулевого воздушного винта отбирается от силовой установки. В нижней части хвостовой балки устанавливается аэродинамический киль 6. Упомянутый аэродинамический киль 6 защищает хвостовой винт при посадке с большими положительными углами тангажа и обеспечивает ориентацию привязного воздушного имитатора вертолета на ветер, снижая затраты мощности рулевого винта 4. В нижней части стержневой фермы размещаются опоры шасси 7, которые являются продолжением фермы фюзеляжа. Ферма фюзеляжа 1 (фиг. 1, 2) закрывается сеткой, которая обеспечивает формирование визуального облика летательного аппарата, близкого к имитируемому объекту. Таким образом обеспечивается имитация геометрических показателей имитируемого воздушного объекта - вертолета.
Для обеспечения имитации отражательных показателей имитируемого воздушного объекта сетка 8, закрывающая ферму 1 и бортовое оборудование 13 внутри нее (фиг. 2), выполняется полностью или частично металлизированной. Это позволяет сформировать необходимую диаграмму ЭПР по ракурсу упомянутого привязного воздушного имитатора вертолета. Для настройки динамики изменения ЭПР, соответствующей реальному вертолету, лопасти несущего и рулевого воздушных винтов 3, 4 (фиг. 3) имеют специально ориентированные радиоотражающие металлические закладные элементы в форме металлических уголков 11, лонжерона лопасти 9 и законцовки 12, которые силовым образом связаны с нервюрами лопасти 10. Такое техническое решение обеспечивает имитацию отражательных характеристик воздушного винта реального вертолета [7].
Для имитации излучательных показателей: теплового поля работающей силовой установки, электромагнитного и светового излучения устройств, работающих в активном режиме, используется дополнительное оборудование, которое устанавливается снаружи на ферму 1 (фиг. 1).
Применение упомянутого ПВИВ осуществляется с использованием специального швартовочного устройства 14 (фиг. 4). Швартовочное устройство соединяется с ПВИВ посредством троса 15. Он обеспечивает удержание летательного аппарата в пределах площадки 16 с радиусом R.
Швартовочное устройство 14 выполнено в виде контейнера с оборудованием 17 (фиг. 5), который закрепляется на оголовке полой винтовой сваи 18. Сверху на контейнере устанавливается узел крепления троса. В упомянутом контейнере 17 устанавливается наземная часть системы управления ПВИВ, получающая электрическое питание и управляющие команды по кабелям. Кабели присоединяются с помощью специальных разъемов к контейнеру 17. В этом же контейнере размещается вычислительный блок системы управления, радиомодем приема данных от бортовых датчиков ПВИВ и передачи на его борт управляющих сигналов, а также датчики системы контроля координат ПВИВ. На борту ПВИВ размещается ответная часть системы управления: датчики, исполнительные устройства и радиомодем приема управляющих сигналов и передачи данных от датчиков.
Работа привязного воздушного имитатор вертолета.
После размещения упомянутого ПВИВ на площадке: установки швартовочного устройства 14 (фиг. 4) в грунт и соединения летательного аппарата со швартовочным устройством тросом 15 по кабелям подается команда на запуск силовой установки. После запуска силовой установки и выхода воздушного винта 3 (фиг. 1) на режим холостого хода в вычислительный блок наземной части системы управления вводится программа полета упомянутого ПВИВ: закон изменения высоты и продолжительности висения по времени, режимы работы дополнительного оборудования. На основании введенной программы вырабатываются управляющие сигналы, которые по радиоканалу поступают от наземного радиомодема к бортовому. От бортового радиомодема управляющие сигналы поступают к бортовым исполнительным устройствам. Упомянутые исполнительные устройства вырабатывают управляющие воздействия на органы управления силовой установкой, несущей воздушный винт 4, рулевым воздушным винтом 4 (фиг. 1). В это время от бортовых датчиков через бортовой и наземный радиомодемы на наземную часть системы управления поступает информация, позволяющая организовать обратную связь. По мере нарастания тяги несущего воздушного винта ПВИВ отделяется от земной поверхности и поднимается на заданную высоту. Контроль координат ПВИВ и его углового положения осуществляется наземной частью системы управления по сигналам от бортовых и наземных датчиков. В соответствии с программой полета и установленным дополнительным оборудованием производится его включение и формирование требуемого комплекса излучательных показателей: теплового поля, излучения прицельных, разведывательных систем и бортовых средств поражения. После прохождения заданного времени система управления переводит ПВИВ в режим снижения до следующей заданной высоты или до посадки в пределах площадки 16 (фиг. 4). После посадки, в зависимости от программы полета, производится выключение силовой установки с переводом бортового комплекса в режим ожидания или перевод силовой установки на холостой ход до следующего взлета. Таким образом осуществляется имитация кинематических показателей воздушного объекта - вертолет.
Реализация приведенной совокупности технических решений в разработке привязного воздушного имитатора вертолета позволяет достичь требуемый технический результат - обеспечить имитацию геометрических, кинематических, излучательных и отражательных показателей вертолета на режимах вертикальных взлета и посадки, висения на заданной высоте в пределах заданной площадки
Источники информации
1. Авиация: Энциклопедия / под ред. Г.П. Свищева. - М.: Большая Российская энциклопедия, 1994. - 736 с. - ISBN 5-85270-086-Х.
2. Зенитчики ЗВО проведут пуски из С-300 по мишеням типа «Стриж» и «Рейс». - 29 марта 2016. - URL: http://vpk-news.ru/news/29985 (дата обр. 04.06.2016).
3. Львова Л. Радиолокационная заметность летательных аппаратов. - Снежинск: Изд-во РФЯЦ - ВНИИТФ, 2003. - 232 с. - ISBN 5-85165-442-2.
4. Патент на изобретение 2583864, РФ, МПК7 F41J 2/02. Мишень имитатор вертолета полигонного комплекса для испытаний боевого снаряжения сухопутных войск [Текст] / Прокуда И.А. (РФ); ЗАО «РЕИНЗ». - Заявл. 21.11.2014; опубл. 10.05.2016.
5. Патент на полезную модель 77412, РФ, МПК11 F41J 9/08. Взлетная мишень имитатора вертолета [Текст] / Кривоногое А.В., Сальников К.В., Сидоров А.Н. (РФ); 195 ЦЗПУО МО РФ. - Заявл. 25.03.2008; опубл. 20.10.2008.
6. Патент на полезную модель 80547, РФ, МПК11 F41J 9100. Вертикально взлетающая мишень имитатора вертолета [Текст] / Журавский В.А., Кривоногов А.В., Сальников К.В. (РФ); 195 ЦЗПУО МО РФ. - Заявл. 10.07.2008; опубл. 10.02.2009.
7. Рассеяние электромагнитных волн воздушными и наземными радиолокационными объектами: монография / О.Сухаревский [и др.]; под ред. О.Сухаревский. - Харьков: ХУПС, 2009. - 468 с.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ТРАНСПОРТИРОВКИ ВЕРТОЛЕТА ТИПА Ми-8 ТРЕЙЛЕРОМ И ОСНАСТКА ДЛЯ РАЗМЕЩЕНИЯ И ШВАРТОВКИ ВЕРТОЛЕТА ТИПА Ми-8 ПРИ ТРАНСПОРТИРОВКЕ ЕГО ТРЕЙЛЕРОМ | 2007 |
|
RU2347711C2 |
| СПОСОБ ТРАНСПОРТИРОВКИ ВЕРТОЛЕТОВ ТИПА МИ-8 САМОЛЕТОМ ИЛ-76 И ОСНАСТКА ДЛЯ РАЗМЕЩЕНИЯ И ШВАРТОВКИ ВЕРТОЛЕТОВ МИ-8 ПРИ ТРАНСПОРТИРОВКЕ ИХ САМОЛЕТОМ ИЛ-76 | 2005 |
|
RU2310584C2 |
| ИМИТАТОР ВОЗДУШНЫХ ЦЕЛЕЙ | 2010 |
|
RU2442947C1 |
| ИМИТАТОР ВОЗДУШНЫХ ЦЕЛЕЙ | 2002 |
|
RU2193747C1 |
| Имитатор воздушных целей | 2020 |
|
RU2769455C1 |
| МНОГОФУНКЦИОНАЛЬНЫЙ ДВУХМЕСТНЫЙ БОЕВОЙ ВЕРТОЛЕТ КРУГЛОСУТОЧНОГО ДЕЙСТВИЯ, КОМПЛЕКС РАДИОЭЛЕКТРОННОГО ОБОРУДОВАНИЯ, ИСПОЛЬЗУЕМЫЙ НА ДАННОМ ВЕРТОЛЕТЕ | 2008 |
|
RU2360836C1 |
| МНОГОФУНКЦИОНАЛЬНЫЙ ТЯЖЕЛЫЙ ТРАНСПОРТНЫЙ ВЕРТОЛЕТ КРУГЛОСУТОЧНОГО ДЕЙСТВИЯ, КОМПЛЕКС БОРТОВОГО РАДИОЭЛЕКТРОННОГО ОБОРУДОВАНИЯ, ИСПОЛЬЗУЕМЫЙ НА ДАННОМ ВЕРТОЛЕТЕ | 2013 |
|
RU2524276C1 |
| ТРАНСПОРТНО-БОЕВОЙ ВЕРТОЛЕТ (варианты) | 2021 |
|
RU2768998C1 |
| ТРЕНАЖЕР ДЛЯ ОБУЧЕНИЯ ЛЕТЧИКОВ ПИЛОТИРОВАНИЮ УДАРНОГО ВЕРТОЛЕТА И ПРИМЕНЕНИЮ АВИАЦИОННЫХ СРЕДСТВ ПОРАЖЕНИЯ | 2008 |
|
RU2367026C1 |
| ВОЗДУШНАЯ МИШЕНЬ | 2013 |
|
RU2530461C1 |
Изобретение относится к области авиации, в частности к средствам имитации подвижных воздушных объектов. Привязной воздушный имитатор вертолета (ПВИВ) включает фюзеляж, несущий воздушный винт, хвостовую балку с рулевым воздушным винтом, систему автоматического управления, силовую установку с редуктором и систему швартовки. Фюзеляж ПВИВ выполнен в виде ферменной конструкции. Все бортовое оборудование размещается в фюзеляже. Эффективная поверхность рассеивания формируется несущим и рулевым воздушными винтами, конструкцией фюзеляжа и металлизированной сеткой, образующей обводы фюзеляжа. Лопасти несущего и хвостового винтов имеют специально ориентированные радиоотражающие металлические закладные элементы. Система управления упомянутого ПВИВ выполняется разнесенной: датчики, исполнительные устройства и радиомодем приема управляющих сигналов и передачи данных от датчиков размещаются в фюзеляже, а вычислительный блок, радиомодем приема данных от датчиков и передачи управляющих сигналов, а также датчики системы контроля координат размещаются на наземном швартовочном устройстве. Достигается имитация геометрических, кинематических, излучательных и отражательных показателей вертолета на режимах вертикальных взлета и посадки, висения. 5 ил.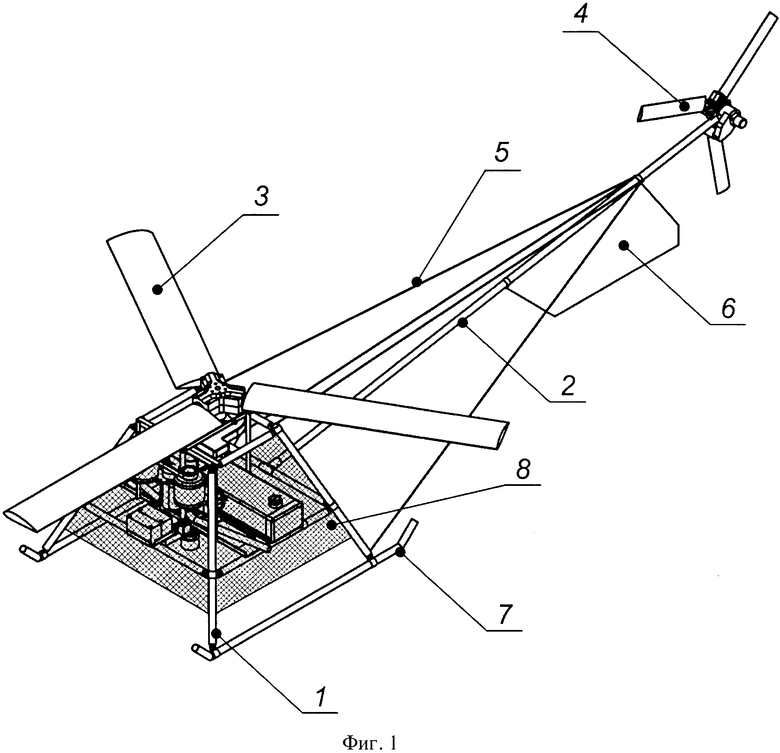
Привязной воздушный имитатор вертолета, включающий фюзеляж, несущий воздушный винт, хвостовую балку с рулевым воздушным винтом, систему автоматического управления, силовую установку с редуктором и швартовочное устройство с тросом, отличающийся тем, что фюзеляж упомянутого привязного воздушного имитатора вертолета выполняется в виде ферменной конструкции, все бортовое оборудование размещается в фюзеляже, шасси выполняется в виде опор, которые являются частью фермы фюзеляжа, при этом эффективная поверхность рассеяния формируется несущим и рулевым воздушными винтами, конструкцией фюзеляжа и металлизированной сеткой, которая образует геометрические обводы фюзеляжа, причем лопасти несущего и рулевого воздушных винтов имеют специально ориентированные радиоотражающие металлические закладные элементы, система управления упомянутого привязного воздушного имитатора вертолета выполняется разнесенной: датчики, исполнительные устройства и радиомодем приема управляющих сигналов и передачи данных от датчиков размещаются в фюзеляже, а вычислительный блок, радиомодем приема данных от датчиков и передачи управляющих сигналов, а также датчики системы контроля координат упомянутого привязного воздушного имитатора вертолета размещаются на наземном швартовочном устройстве, которое удерживает упомянутый воздушный имитатор вертолета при помощи троса в пределах заданной площадки.
| Машина для серебрения термосных колб | 1948 |
|
SU77412A1 |
| Врубово-отбойная машина | 1941 |
|
SU80547A2 |
| МИШЕНЬ ИМИТАТОР ВЕРТОЛЕТА ПОЛИГОННОГО КОМПЛЕКСА ДЛЯ ИСПЫТАНИЙ БОЕВОГО СНАРЯЖЕНИЯ СУХОПУТНЫХ ВОЙСК | 2014 |
|
RU2583864C1 |
| US 5398032 A, 14.03.1995 | |||
| US 4120259 A, 17.10.1978. | |||

