Изобретение относится к способам управления и регулирования насосных установок и может быть использовано для регулирования в установках повышения давления, состоящих из группы однотипных центробежных электроприводных насосов одинаковой мощности и нескольких преобразователей частоты (ПЧ) в качестве регуляторов.
В настоящее время широкое распространение получили насосные установки повышения давления (насосные станции) с количеством центробежных насосов от 2 до 6 одинаковой мощности, работающих от сетей переменного тока и подключенных параллельно между собой. Основными проблемами таких установок являются импульсы электрического тока в сетях питающего напряжения и гидроудары в напорных магистралях при запуске электродвигателей насосов, а также низкая энергоэффективность в процессе регулировании напора (Н). Наиболее эффективными способами решения проблем импульсов питающего напряжения и гидроударов в напорных магистралях являются способы, связанные с использованием частотного управления насосами при их пуске и останове. Одним из таких способов является способ пуска первого и дополнительных насосов с применением преобразователей частоты переменного тока (патент РФ на изобретение №2332588, МПК F04D 15/00).
Известен также способ управления насосной станцией с параллельно работающими насосами, в котором повышение энергоэффективности насосной станции при переменной нагрузки осуществляют за счет использования регулирования каждого насоса от своего ПЧ (стр. 8, рис. 1.5. Преобразователи частотные векторные ОВЕН ПЧВХХ. Руководство по применению в системах каскадного управления насосами. - http://www.owen.ru/uploads/rpr_pchv_kaskad_008.pdf).
Наиболее близким по совокупности существенных признаков к заявляемому изобретению является способ повышения энергоэффективности насосной станции, который включает определение максимальных и минимальных характеристик давления на входе в систему и мощности станции, определение регулировочной характеристики по мощности и по скорости вращения вала электродвигателя, определение потребляемой мощности в качестве управляемого параметра, определение в качестве управляющего воздействия количества работающих насосов и скорость вращения вала их электродвигателей, регулирование давления в системе путем последовательного изменения скорости вращения вала каждого электродвигателя с помощью преобразователей частоты (ПЧ) и/или путем включения дополнительного насоса (патент РФ на изобретение №2561782, МПК F04D 15/00).
Существенным недостатком установок повышения давления с параллельно работающими как регулируемыми, так и нерегулируемыми насосами, снижающим их энергоэффективность, является наличие потерь, обусловленных различиями гидравлических мощностей, генерируемых в в общую напорную магистраль насосами, питаемыми напряжением одинаковой амплитуды и частоты.
Различия гидравлических мощностей работающих на общую магистраль электроприводных насосов Wг, питаемых напряжением одинаковой амлитуды U и частоты F, и имеющих соответственно одинаковую частоту вращения, обусловлены следующими причинами:
1. Различиями гидравлических сопротивлений на выходе насосов, определяемыми их расположением в установке относительно точки подключения напорной магистрали потребителей, вызывающими различия расходов рабочей жидкости, прокачиваемой насосами, из-за различных гидравлических сопротивлений со стороны напорного коллектора, что приводит к различиям генерируемых насосами гидравлических мощностей WГ=HQ, где - Н, м - создаваемый напор, Q, м3/ч - расход рабочей жидкости через насос.
2. Различиями напоров на входе насосов, определяемыми их расположением в установке относительно точки подключения к подающей магистрали. При снижении напора подающей магистрали на входе насоса повышаются некомпенсируемые затраты, следствием чего является снижение генерируемой насосом гидравлической мощности
Различия гидравлических мощностей каждого из n насосов Wгi, i∈1, n, работающих параллельно на общую напорную магистраль, вызывают появление их составляющих, которые не совершают работу, а только уравновешивают их гидравлическую систему.
Развиваемая гидравлическая мощность каждым из n параллельно работающих однотипных насосов Wгi, i∈1, n одинаковой электрической мощности при их вращении с одинаковой частотой в первом приближении одинакова. При параллельной работе насосов часть генерируемой гидравлической мощности каждого насоса расходуется на обеспечение равновесия гидравлической системы насосов. В соответствие этому, появление составляющих гидравлических мощностей, которые обеспечивают равновесие гидравлической системы, снижает составляющие гидравлической мощности, которые обеспечивают совершение полезной работы, тем самым снижая эффективность работы всей установки из-за снижения общего коэффициента полезного действия (КПД), вызванного снижением КПД каждого i-го насоса. Как показывает практика, снижение общего КПД установки может достигать величины 3-18% в зависимости от количества параллельно работающих насосов, а также вида их рабочих характеристик.
Гидравлическая мощность каждого насоса Wгi определяет момент нагрузки на валу его электродвигателя Mi. Поскольку установка повышения давления в установившемся режиме регулирования заданного значения напора Hзад находится в равновесии с напорной магистралью потребителей, развиваемый каждым электродвигателем насоса момент вращения Мвi уравновешивает соответствующий момент нагрузки гидравлической части насоса Mi, т.е. Мвi=Mi. Развиваемый каждым i-м электродвигателем насоса момент вращения Мвi, уравновешивающий момент нагрузки Mi, пропорционален потребляемому им активному току Iai из сети питающего напряжения. Различия гидравлических мощностей насосов ΔWгi вызывают появление дополнительных расходов ΔQi каждого i-го насоса, направленных на уравновешивание их гидравлической системы, при этом суммарный расход Qi через каждый i-й насос установки повышения давления меняется. В том случае, когда суммарный расход Qi через каждый i-й насос возрастает при неизменной частоте его вращения для обеспечения гидравлического равновесия, гидравлическая мощность насоса возрастает, в результате чего повышается момент нагрузки со стороны гидравлической части насоса на величину ΔMi, приводящий к повышению потребляемого из сети активного тока Iai. При этом полезная гидравлическая мощность, генерируемая в магистраль потребителей, не увеличивается. Повышение потребляемого тока Iai приводит к повышению момента вращения ΔMвi. В том случае, когда каждый i+1-й насос, наоборот, принимает на себя часть расхода каждого i-го насоса, в результате чего его расход уменьшается из-за появления локальных противотоков на выходе насоса, уменьшается его гидравлическая мощность, генерируемая в магистраль потребителей, как следствие - снижается момент нагрузки на валу электродвигателя насоса со стороны его гидравлической части на величину ΔMi+1, в соответствие этому снижается потребляемый из сети активный ток Iai+1 при неизменной частоте вращения.
Изменение расхода рабочей жидкости через каждый i-й насос в сторону его увеличения или уменьшения при неизменных оборотах вращения вызывает снижению КПД насоса из-за смещения его рабочей точки от точки максимального КПД соответственно вправо или влево, тем самым вызывая снижение эффективности работы всей установки из-за снижения ее общего КПД.
Приращения моментов нагрузки на валу электродвигателей параллельно работающих насосов ±ΔMi, возникающие из-за изменения расхода через каждый i-й насос на величину ±ΔQi при неизменных оборотах его вращения, являются реактивными, т.е. не совершающими полезную работу. Исходя из этого момент нагрузки каждого i-го насоса Mi, имеющий активную Ммi и реактивную Mуi, составляющие, определится выражением 
Таким образом, возникновение дополнительных уравновешивающих моментов нагрузки Myi. вызывает увеличение или уменьшение активных токов насосов, потребляемых ими из сети питающего напряжения, определяемое как отклонение от их среднеквадратичного значения  , с одновременным снижением КПД каждого насоса, что свидетельствет о снижении энергоэффективности всей установки за счет снижения ее общего КПД.
, с одновременным снижением КПД каждого насоса, что свидетельствет о снижении энергоэффективности всей установки за счет снижения ее общего КПД.
Задачей заявляемого изобретения является устранение недостатков указанного выше технического решения и достижение технического результата в отношении повышения энергоэффективности за счет повышения общего КПД установки в процессе регулирования напора в напорной магистрали потребителей.
Достижение указанного технического результата в заявляемом изобретении достигается за счет осуществления способа повышения энергоэффективности установок повышения давления с центробежными электроприводными насосами, управляемыми преобразователями частоты по закону ПИД-регулирования, включающего определение и контроль количества работающих насосов n, измерение тока активной нагрузки каждого работающего электродвигателя насоса Iai,
определение отклонения токов активной нагрузки каждого работающего электродвигателя от их среднеквадратичного значения, вычисленного по формуле  пошаговый ввод корректирующего значения частоты управляющего сигнала в блоке управления для каждого работающего электродвигателя, равного произведению единицы младшего разряда частоты управления на масштабирующий коэффициент, до выполнения условия
пошаговый ввод корректирующего значения частоты управляющего сигнала в блоке управления для каждого работающего электродвигателя, равного произведению единицы младшего разряда частоты управления на масштабирующий коэффициент, до выполнения условия  .
.
Для однозначного и более полного понимания описания заявляемого изобретения далее приведены уточнения и раскрытия использованных выше понятий и терминов, а также описание отдельных этапов способа.
Под ПИД-регулированием в технической литературе понимают способ управления с обратной связью, включающий сумму пропорциональной, интегральной и дифференциальной составляющих отклонения определяющего параметра (в данном описании - напора в магистрали потребителей от его заданного значения Нзад). В рассматриваемых установка ПИД-регулирование с параллельно работающими управляемыми от ПЧ насосами осуществляется централизованным управляющим компьютером. При ПИД-регулировании насосов повышения давления выходным сигналом ПИД-регулятора управляющего компьютера является значение частоты регулирования FПИД, Гц, записываемое параллельно в каждый управляющиий насосом ПЧ с интервалом времени регулирования Δtрег., с. При пуске каждого насоса в ячейку управления ПЧ этого насоса записывается значенияе Fi, Гц с интервалом времени Δtрег пошаговым его изменением от Fi=0 до Fi-=FПИД, что обеспечивает плавное увеличение производительности насоса до уровня, определяемого значением FПИД. При останове каждого насоса в ячейку управления ПЧ этого насоса пошагово записывается значение Fi с интервалом времени Δtрег до достижения значения Fi=0, что обеспечивает плавное снижение производительности насоса до его полного останова. Значение интервала времени Δtрег определяется эмпирически и лежит в пределах 0,01-1,0 с. Минимальное и максимальное значение интервала Δtрег определено различиями объемов магистралей потребителей, а также различиями динамики изменения расхода. Для меньших объемов и высокой динамики выбираются значения Δtрег в области нижнего предела, для больших объемов и низкой динамики изменения расхода - значения в области верхнего предела. При этом значения Δtрег, выбираемые в области нижнего предела, могут привести к знакопеременным изменениям напора в области Нзад, а увеличение Δtрег в область верхних значений, наоборот, может привести к периодическому вознивновению статической ошибки ΔНзад. В процессе регулирования каждого i-го насоса после завершения цикла его пуска и отсутствия команды на останов в ячейку управления его ПЧ записывается значение FПИД. По истечении времени выхода насоса на режим в результате последовательности интервалов времени записи Δtрег выполняется условие Fi=FПИД, что в заявляемом способе определено как условие равновесия вращения каждого i-го насоса.
В заявляемом способе используют управляемые от ПЧ центробежные насосы, приводимые во вращение электродвигателями переменного тока, подключенными к промышленным сетям переменного тока частотой 50 Гц. Количество насосов в установке варьируется от 2 до 6. Указанное количество определяет ступень регулирования и закладывается на стадии проектирования установки в зависимости от заданных характеристик потребления. Минимальное количество насосов определяется минимальными условиями осуществления способа, максимальное - количеством ступеней регулирования, а также снижением КПД установки до уровня, когда подключение дополнительного насоса увеличивает ее производительность на величину, меньшую определяемой ступени регулирования для каждого насоса. Регулирование напора осуществляют за счет изменения количества подключаемых насосов и частоты их вращения. Регулирование частоты вращения насосов осуществляют регулированием частоты вращения роторов их электродвигателей за счет изменения амплитуды Ui и частоты Fi напряжения переменного тока посредством ПЧ каждого i-го насоса по регулировочной характеристике выходного напряжения ПЧ Ki=Ui/Fi, где Ki - постоянный коэффициент наклона характеристики, а также введением корректирующих значений управляющего сигнала ±ΔFi в ПЧ каждого i-го насоса, определяемых величиной и знаком отклонения потребляемых насосами активных токов Iai от их среднеквадратичного значения, которое вызывает приращение питающего напряжения ΔUi согласно регулировочной характеристике. Изменение питающего напряжения вызывает изменение момента вращения электродвигателя насоса, тем самым изменяя гидравлическую мощность насоса.
Рассматриваемая разновидность установок содержит несколько ПЧ, обеспечивающих регулирование каждым управляемым насосом. В общем случае количество ПЧ может быть меньше количества насосов в установке, но не менее двух. Такая конфигурация установок в настоящее время широко распространена и обеспечивает наиболее комфортное регулирование насосами. При этом каждый насос запускается, регулируется и останавливается от своего отдельного ПЧ. При таком управлении отсутствуют гидроудары в напорных магистралях, а также импульсы тока питающего напряжения.
Момент нагрузки каждого i-го насоса Mi, имеющий активную Mмi и реактивную Myi составляющие  пропорционален активному значению тока Iai, потребляемому им из сети питающего напряжения, и определяет количество потребляемой электроэнергии, при этом
пропорционален активному значению тока Iai, потребляемому им из сети питающего напряжения, и определяет количество потребляемой электроэнергии, при этом  что следует из условия равновесия параллельно работающих насосов. Сумма моментов насосов, определяющая значение развиваемой установкой мощности, соответственно, определится выражением
что следует из условия равновесия параллельно работающих насосов. Сумма моментов насосов, определяющая значение развиваемой установкой мощности, соответственно, определится выражением 
 где Мм, - суммарный момент вращения насосов установки повышения давления по созданию заданной гидравлической мощности в магистрали потребителей.
где Мм, - суммарный момент вращения насосов установки повышения давления по созданию заданной гидравлической мощности в магистрали потребителей.
В случае, если уравновешивающие моменты внутри установки обнулить путем изменения производительности регулируемых насосов за счет изменения их частоты вращения в ту или иную сторону, развиваемый насосами установки суммарный момент вращения определится выражением  .
.
Для Myi>0, i∈1, n, выполняется неравенство Муст1>Муст2 для той же суммы моментов Мм, определяющих полезную гидравлическую мощность установки на создание заданного значения напора при располагаемом расходе магистрали потребителей. Таким образом, потребление электроэнергии из сети питающего напряжения снижается при совершении той же полезной работы.
Поскольку наличие реактивных моментов Myi определяется отклонением потребляемых токов насосов от их среднеквадратичного значения, справедливо соотношение 
Таким образом, выравнивание нагрузок параллельно работающих насосов за счет выравнивания потребляемых ими активных токов Iai проиводит к снижению электроэнергии, потребляемой установкой повышения давления, при совершении той же активной работы по созданию заданного значения напора Hзад для располагаемого расхода Q со стороны потребителей за счет обеспечения работы каждого регулируемого насоса в области точки его максимального КПД.
Выравнивание нагрузок параллельно работающих насосов производится изменением частоты вращения каждого насоса в сторону ее увеличения или уменьшения на величину поправки ±ΔFi в зависимости от знака отклонения активного тока каждого i-го насоса Iаi от их среднеквадратичного значения . При этом происходит приращение регулировочной характеристики выходного напряжения ПЧ каждого i-го насоса, которая приобретает вид Ki=(Ui±ΔUi)/(Fi±ΔFi).
При  для каждого i-го насоса ΔFi>0, при этом соответственно ΔUi>0, что приводит в увеличению вращающего момента ΔMi, определяемого увеличением величины питающего напряжения (Ui+ΔUi), как следствие, - возрастание момента сопротивления на величину ΔMi, который определяет увеличение потребляемого активного тока Iai при одновременном увеличении частоты вращения насоса.
для каждого i-го насоса ΔFi>0, при этом соответственно ΔUi>0, что приводит в увеличению вращающего момента ΔMi, определяемого увеличением величины питающего напряжения (Ui+ΔUi), как следствие, - возрастание момента сопротивления на величину ΔMi, который определяет увеличение потребляемого активного тока Iai при одновременном увеличении частоты вращения насоса.
При  для каждого i-го насоса ΔFi<0, соответственно ΔUi<0, что приводит в снижению вращающего момента ΔMi, определяемого снижением величины питающего напряжения (Ui+ΔUi), как следствие - снижение момента сопротивления на величину ΔMi, которое определяет снижение активного тока Iai при одновременном снижении частоты вращения насоса.
для каждого i-го насоса ΔFi<0, соответственно ΔUi<0, что приводит в снижению вращающего момента ΔMi, определяемого снижением величины питающего напряжения (Ui+ΔUi), как следствие - снижение момента сопротивления на величину ΔMi, которое определяет снижение активного тока Iai при одновременном снижении частоты вращения насоса.
Ввод корректирующих значений частоты управляющего сигнала производится пошагово с интервалом времени Δtк. находящего в пределах 0,1-20,0 с. При этом выбор шага Δtк необходимо производить из соображений Δtк=(10-20)⋅Δtрег. Выбор меньших значений шага коррекции управляющего сигнала Δtк может повлиять на точность регулирования, выбор больших значений снижает эффективность коррекции управляющего сигнала.
Каждое вводимое пошагово корректирующее значение равно единице младшего разряда частоты ПИД-регулирования, умноженный на масштабирующий коэффициент ri. Например, если ПИД-регулирование производится с точностью до первого знака после запятой, корректирующее значение составляет ΔFri=r⋅0,1, Гц, до выполнения условия  .
.
При вводе корректирующего значения частоты управляющего сигнала каждого i-го насоса для минимизации ошибок регулирования вводится ограничение его суммарного значения ±ΔFi. При этом  для k последовательных шагов ввода корректирующего сигнала с интервалом Δtк. Практика показывает, что суммарное значение корректирующего сигнала преобразователя частоты для каждого i-го электродвигателя целесообразно ограничить в интервале ΔFi=±5 Гц. В случае увеличения величины корректирующего сигнала интервал времени ввода корректирующих значений увеличивается, что приведет к снижению общего КПД установки.
для k последовательных шагов ввода корректирующего сигнала с интервалом Δtк. Практика показывает, что суммарное значение корректирующего сигнала преобразователя частоты для каждого i-го электродвигателя целесообразно ограничить в интервале ΔFi=±5 Гц. В случае увеличения величины корректирующего сигнала интервал времени ввода корректирующих значений увеличивается, что приведет к снижению общего КПД установки.
Для исключения выведения системы из равновесия при пусках и остановах дополнительных насосов перед измерением токов активной нагрузки электродвигателей насосов Iai, i∈1, n управляющий компьютер проверяет условие равновесия вращения каждого насоса, определяемое как Fi=FПИД, где Fi - частота ПИД-регулирования, записываемая управляющим компьютером в ячейку управления ПЧ каждого i-го насоса, FПИД - частота ПИД-регулятора управляющего компьютера.
Заявляемое изобретение характеризуется следующей совокупностью существенных признаков, а именно наличием следующей последовательности действий, которая обеспечивает достижение заявленного технического результата:
- определение и контроль количества работающих насосов n,
- измерение тока активной нагрузки каждого работающего электродвигателя насоса Iai,
- определение отклонения тока активной нагрузки каждого i-го работающего электродвигателя от их среднеквадратичного значения, вычисленного по формуле
- пошаговый ввод корректирующего значения частоты управляющего сигнала с интервалом Δtк в блоке управления для каждого работающего двигателя, равного произведению единицы младшего разряда частоты управления на масштабирующий коэффициент, до выполнения условия  .
.
Указанная совокупность существенных признаков заявляемого изобретения позволяет заключить, что по сравнению с указанными выше прототипом и аналогами оно позволяет повысить энергоэффективность работы насосных установок повышения давления с параллельно регулируемыми ПЧ центробежными насосами с электроприводом за счет повышения КПД установки в процессе регулирования напора в напорной магистрали потребителя и тем самым реализовать заявленный технический результат.
Подтверждением достижения технического результата заявляемого изобретения является реализация указанного назначения, что следует из перечисленной совокупности существенных признаков и приведенных ниже примеров реализации способа.
Совокупность существенных признаков заявляемого технического решения представляет собой процесс, в котором последовательно во времени осуществляют действия над материальными объектами - насосами, ПЧ, измерительными приборами, питающими сетями напряжения и напорной магистралью. Этими действиями являются: пуск насосов от ПЧ, регулирование насосов, измерение активных токов электродвигателей насосов, формирование корректирующих значений ПИД-регулирования путем управления электронными сигналами, а также выравнивание активных токов электродвигателей насосов до уровня среднего вычисляемого значения в процессе регулирования напора за счет ввода корректирующих значений. Указанные действия осуществляют с помощью управляющих контроллеров (компьютеров), ПЧ, переключателей, аппаратуры защиты, коммутационной аппаратуры. Все действия над указанными материальными объектами выполняются во времени и в определенной последовательности. Таким образом, заявляемое изобретение представляет собой процесс осуществления действий над материальными объектами с помощью материальных средств, т.е. является техническим решением - способом и относится к объектам, охраняемым в качестве изобретения.
Изобретение может быть применено в промышленности и коммунальном хозяйстве. Применение и использование заявляемого способа не вызывает трудностей и может быть осуществлено людьми, имеющими специальную техническую подготовку. При осуществлении способа используются устройства и приборы, выпускаемые промышленностью и находящиеся в открытой продаже. Методами осуществления изобретения являются операторская работа с техническим оборудованием, приборами контроля и регулирования, а также с компьютером. Средствами осуществления являются насосы, компьютеры, преобразователи частоты, переключатели, автоматические выключатели, магнитные пускатели.
Отличительными от прототипа существенными признаками заявляемого изобретения являются:
- измерение тока активной нагрузки каждого работающего электродвигателя насоса Iai,
- определение отклонения тока активной нагрузки каждого работающего электродвигателя от их среднеквадратичного значения, вычисленного по формуле 
- пошаговый ввод в блок управления корректирующего значения частоты управляющего сигнала для каждого работающего двигателя, равного произведению единицы младшего разряда частоты управления на масштабирующий коэффициент, до выполнения условия  .
.
Здесь следует подчеркнуть, что в отличие от прототипа в заявляемом изобретении в качестве регулировочных характеристик используют характеристики выходного напряжения каждого i-го ПЧ Ki=Ui/Fi, а не характеристики по мощности и по скорости вращения вала электродвигателя. В свою очередь, в качестве управляемого параметра для каждого насоса в заявляемом изобретении используют величину отклонения тока активной нагрузки каждого i-го электродвигателя Iai от их среднеквадратичного значения  а не потребляемую мощность, как в прототипе. При этом минимум функционала управления, определяемый условием , достигается за счет использования внутренней обратной связи каждого i-го электродвигателя, обеспечиваемой его механической характеристикой. Целесообразность и корректность использования этих существенных признаков и их характеристик для достижения заявленного технического результата обоснована выше при раскрытии изобретения.
а не потребляемую мощность, как в прототипе. При этом минимум функционала управления, определяемый условием , достигается за счет использования внутренней обратной связи каждого i-го электродвигателя, обеспечиваемой его механической характеристикой. Целесообразность и корректность использования этих существенных признаков и их характеристик для достижения заявленного технического результата обоснована выше при раскрытии изобретения.
В частности следует обратить внимание на следующие особенности указанных отличительных признаков:
- из уровня техники явным образом не следует возможность корректирования сигналов ПИД-регулирования отдельными насосами в зависимости от величины отклонений потребляемых токов от их среднеквадратичного значения, также не известно практическое использование такой корректировки,
- не известно и также не следует явным образом из уровня техники определение значения отклонения тока активной нагрузки каждого работающего электродвигателя от их среднеквадратичного значения в случае определения корректирующего значения частоты управляющего сигнала,
- также не известно и практически не используется при регулировании центробежных электроприводных насосов, управляемых ПЧ, определение корректирующего значения частоты управляющего сигнала для каждого работающего двигателя как произведения единицы младшего разряда частоты управления на масштабирующий коэффициент.
Повышение эффективности заявленного технического результата достигают в следующих нижеперечисленных модификациях способа, характеризующих частные случаи его выполнения.
1. Заявляемый и описанный выше способ, в котором корректирующее значение вводят пошагово с интервалом времени 0,1-20 с.
2. Способ по п. 1, в котором величина вводимого пошагово корректирующего значения управляющего сигнала соответствует единице младшего разряда частоты ПИД-регулирования.
3. Способ по п. 1, в котором ограничивают суммарное значение корректирующего сигнала преобразователя частоты для каждого i-го электродвигателя в интервале ±5 Гц.
4. Способ по п. 1, в котором перед измерением токов активной нагрузки электродвигателей насосов проверяют условие равновесия вращения каждого работающего насоса, которое заключается в том, что насос не находится в процессе пуска или останова.
Указанные выше модификации заявляемого способа являются промышленно применимыми, т.к. могут быть применены в промышленности и коммунальном хозяйстве. Применение и использование заявляемого способа не вызывает трудностей и может быть осуществлено людьми, имеющими специальную техническую подготовку. При осуществлении способа используются устройства и приборы, выпускаемые промышленностью и находящиеся в открытой продаже. Методами осуществления изобретения являются операторская работа с техническим оборудованием, приборами контроля и регулирования, а также с компьютером. Средствами осуществления являются насосы, компьютеры, преобразователи частоты, переключатели, автоматические выключатели, магнитные пускатели.
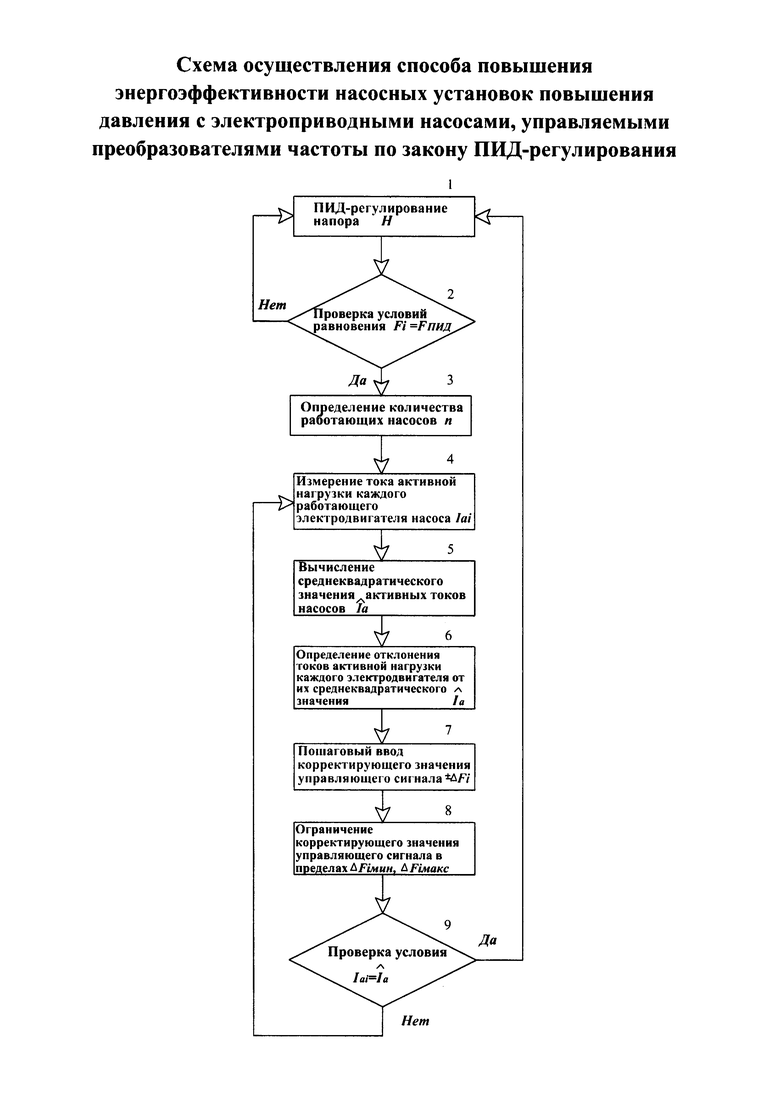
Описание заявленного способа пояснены схемой, на которой приведены следующие обозначения:
1 - ПИД-регулирование напора
2 - Проверка условий равновесия Fi=FПИД, i∈1, n
3 - Определение количества работающих насосов n
4 - Измерение тока активной нагрузки каждого работающего электродвигателя насоса Iаi
5 - Вычисление среднеквадратичного значения активных токов насосов
6 - Определение отклонений токов активной нагрузки электродвигателя каждого нгасоса Iai от их среднеквадратичного значения 
7 - Пошаговый ввод корректирующего значения управляющего сигнала ±ΔFi
8 - Ограничение корректирующего значения управляющего сигнала в пределах ΔFiмин, ΔFiмакс
9 - Проверка выполнения условия 
Заявляемый способ относится к способам повышения эффективности работы установок повышения давления, состоящих из группы центробежных электроприводных насосов в количестве от 2 до 6, регулируемых преобразователями частоты. Кроме того, установки могут содержать дополнительное и вспомогательное оборудование: контроллеры, магнитные пускатели, переключатели, датчики давления, электроизмерительную аппаратуру. В начале осуществления способа в процессе ПИД-регулирования напора H(1) проверяют условия равновесия вращения каждого i-го насоса Fi=FПИД (2) и определяют количество работающих насосов n (3), отвечающих условиям равновесия. Для каждого i-го работающего насоса производят измерение активного тока его электродвигателя (4). По результатам измерений производят вычисление среднеквадратичного значения активных токов  , потребляемых работающими насосами установки (5), затем определяют отклонения токов активной нагрузки каждого электродвигателя из n работающих насосов от их среднеквадратичного значения
, потребляемых работающими насосами установки (5), затем определяют отклонения токов активной нагрузки каждого электродвигателя из n работающих насосов от их среднеквадратичного значения  . В зависимости от знака отклонения производят пошаговый ввод корректирующего значения управляющего сигнала ±ΔFi (7), при этом для минимизации ошибок регулирования производят его ограничение (8). Ввод корректирующих значений управляющего сигнала для каждого насоса производят до выполнения условия
. В зависимости от знака отклонения производят пошаговый ввод корректирующего значения управляющего сигнала ±ΔFi (7), при этом для минимизации ошибок регулирования производят его ограничение (8). Ввод корректирующих значений управляющего сигнала для каждого насоса производят до выполнения условия 
Пример 1 осуществления изобретения.
Применяют насосную установку повышения давления в напорной магистрали потребителя для подачи воды и поддержания напора на заданном уровне. Установка включает 6 насосов, что соответствует их максимально возможному количеству, мощностью 15 кВт, регулируемых шестью ПЧ, а также необходимое коммутационное, защитное и контрольное оборудование. При выходе на режим регулирования шести насосов путем их каскадного пуска от ПЧ определили и проконтролировали количество работающих насосов - 6. Для каждого i-го насоса определили ток активной нагрузки каждого работающего электродвигателя насоса Iai, после чего вычислили среднеквадратичное значение потребляемых насосами токов  и определили отклонение активного тока каждого электродвигателя от их среднеквадратичного значения. Максимальное отклонение тока, потребляемого каждым из шести работающих насосов, от их среднеквадратичного значения без режима корреции составило ΔIaмакс=3,6 А. Далее сформировали и пошагово ввели с шагом Δtк=5,0, с поправки к сигналам ПИД-регулирования насосов в блоке управления до выполнения условия
и определили отклонение активного тока каждого электродвигателя от их среднеквадратичного значения. Максимальное отклонение тока, потребляемого каждым из шести работающих насосов, от их среднеквадратичного значения без режима корреции составило ΔIaмакс=3,6 А. Далее сформировали и пошагово ввели с шагом Δtк=5,0, с поправки к сигналам ПИД-регулирования насосов в блоке управления до выполнения условия  , при этом поправки составили ±(1,5-3,4) Гц для отдельных насосов. Осуществленная таким образом коррекция управляющих сигналов ПИД-регулятора для каждого насоса позволила снизить потребляемую мощность с 90 до 80,1 кВт при поддержании того же уровня напора, тем самым экономия электроэнергии составила 11% для данного режима водопотребления.
, при этом поправки составили ±(1,5-3,4) Гц для отдельных насосов. Осуществленная таким образом коррекция управляющих сигналов ПИД-регулятора для каждого насоса позволила снизить потребляемую мощность с 90 до 80,1 кВт при поддержании того же уровня напора, тем самым экономия электроэнергии составила 11% для данного режима водопотребления.
Пример 2 осуществления изобретения.
Установка повышения давления в напорной магистрали потребителя для подачи воды включает 4 насоса мощностью 90 кВт и два ПЧ в силовой схеме, а также необходимое коммутационное и контрольное оборудование. При выходе на режим регулирования двух насосов путем их каскадного пуска от ПЧ определили и проконтролировали количество работающих насосов - 2. Для каждого насоса определили ток активной нагрузки каждого работающего электродвигателя насоса Iai, после чего вычислили среднеквадратичное значение потребляемых насосами токов  и определили отклонение активного тока каждого электродвигателя от их среднеквадратичного значения. Максимальное отклонение тока, потребляемого каждым насосом, от их среднеквадратичного значения без режима корреции составило ΔIaмакс=8,4 А. Далее сформировали и пошагово ввели с шагом Δtк=12,0, с поправки к сигналам ПИД-регулирования насосов в блоке управления до выполнения условия
и определили отклонение активного тока каждого электродвигателя от их среднеквадратичного значения. Максимальное отклонение тока, потребляемого каждым насосом, от их среднеквадратичного значения без режима корреции составило ΔIaмакс=8,4 А. Далее сформировали и пошагово ввели с шагом Δtк=12,0, с поправки к сигналам ПИД-регулирования насосов в блоке управления до выполнения условия  , при этом поправки составили (-1,2) и 1,5 Гц соответственно для первого и второго насосов.
, при этом поправки составили (-1,2) и 1,5 Гц соответственно для первого и второго насосов.
Осуществленная таким образом коррекция управляющих сигналов ПИД-регулятора для каждого насоса позволила снизить снизил потребляемую мощность при работе двух насосов в режиме ПИД-регулирования со 164,8 до 154,9 кВт при том же уровне напора, тем самым экономия электроэнергии составила 6% для данного режима водопотребления.
Приведенные выше варианты примеров не следует рассматривать как ограничивающие объем изобретения. Напротив, возможны также варианты, модификации и эквиваленты описанных примеров в пределах объема прав, изложенных в формуле изобретения.
Приведенные выше описание осуществления изобретения и примеры его реализации подтверждают достижение заявленного технического результата в процессе осуществлении изобретения. Они также показывают причинно-следственную связь существенных признаков между собой и достигаемым техническим результатом.
Из приведенного выше описания также следует, что достижение технического результата возможно только при осуществлении всей совокупности существенных признаков, что подтверждает также техническое решение задачи осуществления изобретения.
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ управления установками повышения давления с электроприводными насосами, регулируемыми преобразователями частоты | 2016 |
|
RU2623586C1 |
| Способ каскадного пуска электроприводных насосов в установках повышения давления с преобразователем частоты в качестве регулятора | 2016 |
|
RU2624933C1 |
| СПОСОБ ПОВЫШЕНИЯ ЭНЕРГОЭФФЕКТИВНОСТИ НАСОСНОЙ СТАНЦИИ | 2014 |
|
RU2561782C1 |
| СПОСОБ УПРАВЛЕНИЯ ВЫХОДНЫМ ДАВЛЕНИЕМ РАБОЧЕЙ ЖИДКОСТИ НАСОСНОЙ СТАНЦИИ И СТАБИЛИЗАЦИИ ЭТОГО ДАВЛЕНИЯ И НАСОСНАЯ СТАНЦИЯ ДЛЯ ОСУЩЕСТВЛЕНИЯ СПОСОБА | 2003 |
|
RU2251025C1 |
| СПОСОБ ОТКАЧКИ НЕФТИ ИЗ СКВАЖИН С БОЛЬШИМ ГАЗОСОДЕРЖАНИЕМ И ЭЛЕКТРОПОГРУЖНАЯ УСТАНОВКА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2007 |
|
RU2380521C2 |
| СПОСОБ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ ТЕХНОЛОГИЧЕСКИМ ПРОЦЕССОМ ПОДАЧИ ГАЗОВОГО КОНДЕНСАТА В МАГИСТРАЛЬНЫЙ КОНДЕНСАТОПРОВОД | 2017 |
|
RU2647288C1 |
| СПОСОБ АДАПТИВНОГО УПРАВЛЕНИЯ АКТИВНОЙ МОЩНОСТЬЮ ГИДРОАГРЕГАТА С ПОВОРОТНО-ЛОПАСТНОЙ ТУРБИНОЙ | 2009 |
|
RU2468246C2 |
| СПОСОБ УПРАВЛЕНИЯ ЭНЕРГОПОТРЕБЛЕНИЕМ НАСОСНОЙ СТАНЦИИ | 2006 |
|
RU2310792C1 |
| Способ испытания насосных агрегатов и насосных установок | 1988 |
|
SU1634824A1 |
| Способ управления автономной энергоустановкой (варианты) | 2017 |
|
RU2677258C1 |
Изобретение относится к способам управления и регулирования насосных установок, состоящих из группы однотипных насосов одинаковой мощности. Способ повышения энергоэффективности установок повышения давления с центробежными электроприводными насосами, управляемыми преобразователями частоты по закону ПИД-регулирования, включает определение и контроль количества работающих насосов n, измерение тока активной нагрузки каждого работающего электродвигателя насоса Iаi, определение отклонения токов активной нагрузки каждого работающего электродвигателя от их среднеквадратичного значения, вычисленного по формуле  пошаговый ввод корректирующего значения частоты управляющего сигнала в блоке управления для каждого работающего электродвигателя, равного произведению единицы младшего разряда частоты управления на масштабирующий коэффициент, до выполнения условия
пошаговый ввод корректирующего значения частоты управляющего сигнала в блоке управления для каждого работающего электродвигателя, равного произведению единицы младшего разряда частоты управления на масштабирующий коэффициент, до выполнения условия  . Изобретение направлено на повышение энергоэффективности за счет повышения общего КПД установки в процессе регулирования напора в напорной магистрали потребителей. 4 з.п. ф-лы, 1 ил.
. Изобретение направлено на повышение энергоэффективности за счет повышения общего КПД установки в процессе регулирования напора в напорной магистрали потребителей. 4 з.п. ф-лы, 1 ил.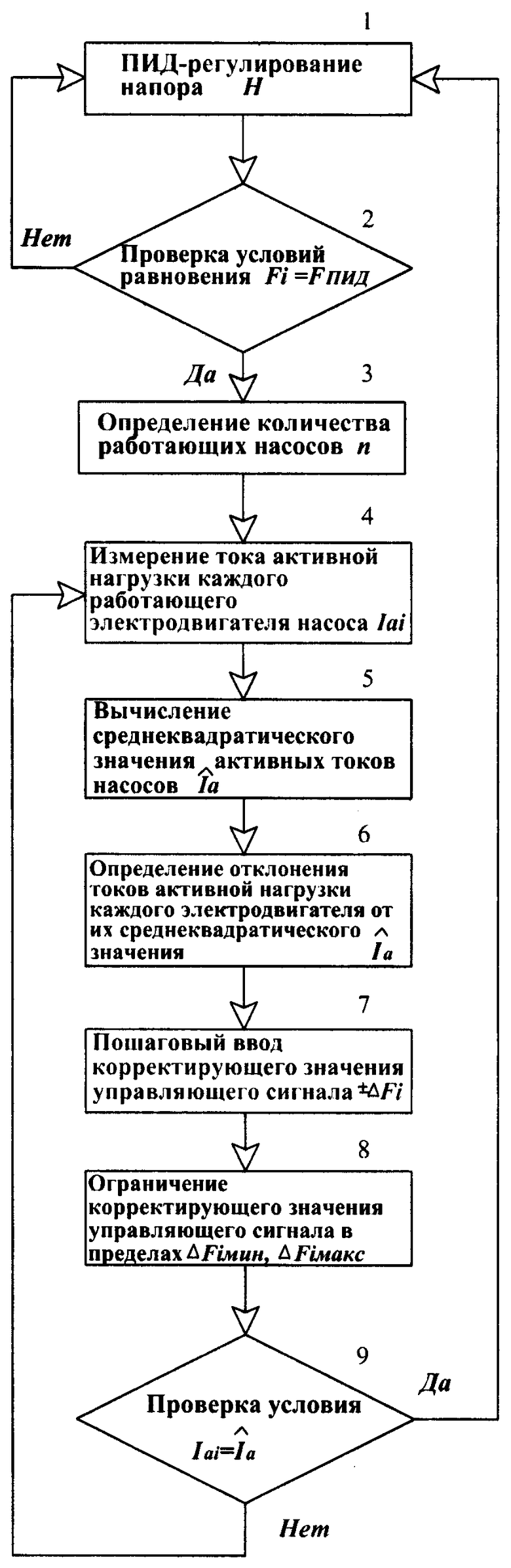
1. Способ повышения энергоэффективности установок повышения давления с центробежными электроприводными насосами, управляемыми преобразователями частоты по закону ПИД-регулирования, включающий определение и контроль количества работающих насосов n, измерение тока активной нагрузки каждого работающего электродвигателя насоса Iai, определение отклонения токов активной нагрузки каждого работающего электродвигателя от их среднеквадратичного значения, вычисленного по формуле
пошаговый ввод корректирующего значения частоты управляющего сигнала в блоке управления для каждого работающего электродвигателя, равного произведению единицы младшего разряда частоты управления на масштабирующий коэффициент, до выполнения условия 
2. Способ по п. 1, в котором корректирующее значение вводят пошагово с интервалом времени 0,1-20 с.
3. Способ по п. 1, в котором величина вводимого пошагово корректирующего значения управляющего сигнала соответствует единице младшего разряда частоты ПИД-регулирования.
4. Способ по п. 1, в котором ограничивают суммарное значение корректирующего сигнала преобразователя частоты для каждого i-го электродвигателя в интервале ±5 Гц.
5. Способ по п. 1, в котором перед измерением токов активной нагрузки электродвигателей насосов проверяют условие равновесия вращения каждого работающего насоса, которое заключается в том, что насос не находится в процессе пуска или останова.
| СПОСОБ ПОВЫШЕНИЯ ЭНЕРГОЭФФЕКТИВНОСТИ НАСОСНОЙ СТАНЦИИ | 2014 |
|
RU2561782C1 |
| СИСТЕМА И СПОСОБ УПРАВЛЕНИЯ ДАВЛЕНИЕМ В СЕТИ | 2011 |
|
RU2579424C2 |
| СПОСОБ АВТОМАТИЗИРОВАННОГО УПРАВЛЕНИЯ ЭЛЕКТРОПРИВОДОМ НАСОСНОЙ СТАНЦИИ | 2013 |
|
RU2551139C1 |
| Устройство для определения местоположения течи в трубопроводе | 1949 |
|
SU87429A1 |
| RU 2010109111 A, 20.09.2011 | |||
| US 9051936 B2, 09.01.2015. | |||

