Изобретение относится к способам адаптивного управления активной мощностью гидроагрегата с поворотно-лопастной турбиной ГЭС и может использоваться в системах автоматического управления гидроагрегатами.
Известен способ управления активной мощностью гидроагрегата с поворотно-лопастной турбиной, заключающийся в изменении величины открытия направляющего аппарата и угла установки лопастей рабочего колеса турбины путем формирования и подачи управляющих воздействий на сервомоторы механизмов открытия направляющего аппарата и разворота лопастей рабочего колеса (Кривченко Г.И. Гидравлические машины. - М.: Энергия, 1978, с.12-138). Управляющие воздействия на сервомоторы механизмов открытия направляющего аппарата и разворота лопастей рабочего колеса формируют по алгоритмам, которые составляют с применением модели гидроагрегата, содержащей комбинаторную зависимость и основное энергетическое уравнение гидроагрегата с поворотно-лопастной турбиной. Управляющее воздействие u1(t) на сервомотор механизма разворота лопастей рабочего колеса формируют в электронном или цифровом преобразователе (комбинаторе) по одинаковой для всех гидроагрегатов одного типа, установленных на многоагрегатной ГЭС, зависимости требуемого угла установки лопастей φmp(t) от статического напора Hcm и величины открытия направляющего аппарата s(t) турбины (комбинаторной зависимости):

Комбинаторную зависимость (1) определяют по результатам экспериментальных исследований макета поворотно-лопастной турбины. Затем ее уточняют при натурных энергетических испытаниях головного образца в реальных условиях эксплуатации по результатам определения расхода воды Q через турбину при разных комбинациях значений угла установки лопастей φ, величины открытия направляющего аппарата s, активной мощности Na и напора Н (при фиксированной угловой скорости вращения ротора ω). Расход воды Q вычисляют по уравнению:

где Δр - перепад давления в расходомерном створе турбины; b0 - показатель степени, величину которого для бетонных спиральных камер прямоугольного сечения выбирают из диапазона (0,48÷0,52); b1 - тарировочный коэффициент, величину которого определяют методом подобия (индексным методом) по заводской эксплуатационной характеристике (Турбины гидравлические. Методы натурных испытаний. ГОСТ 28842-90. - М., 1991 г.).
В уравнение (1) откорректированной комбинаторной зависимости включают комбинации указанных переменных, обеспечивающие максимальный кпд турбины, который определяют расчетным путем (индексным методом) по основному энергетическому уравнению гидроагрегата с поворотно-лопастной турбиной:

где Мдв - момент движущих сил, создаваемый потоком воды на лопастях рабочего колеса; η - кпд гидроагрегата, с помощью которого оценивают величину механических и электромагнитных потерь в турбине и генераторе;

α1 - угол между вектором окружной скорости и вектором абсолютной скорости потока воды на входной кромке лопасти рабочего колеса в расчетном сечении при заданной величине открытия направляющего аппарата s; βp - расчетный угол установки лопастей рабочего колеса; φ - угол разворота лопастей рабочего колеса (угол отклонения лопастей рабочего колеса от расчетного угла установки); ρ - плотность воды; D - максимальный диаметр рабочего колеса; d - диаметр втулки рабочего колеса (Кривченко Г.И. Гидравлические машины. - М.: Энергия, 1978, с.12-138).
Этот способ управления активной мощностью используют в существующих системах автоматического управления гидроагрегатами ГЭС России. При этом параметры ПИД-регулятора активной мощности определяют при вводе каждого агрегата в эксплуатацию (в том числе, после очередного ремонта) по результатам специальных испытаний, выполняемых в процессе пуско-наладочных работ, с применением линейной модели процессов преобразования энергии в гидроагрегате. Параметры этой модели объекта управления определяют по результатам этих же испытаний. (Панель электрооборудования ЭГР-МП-2-1-220-220/50-1-0-03 УХЛ4. Руководство по эксплуатации 2266999 РЭ: - ОАО «Ленинградский металлический завод», 2003 г.).
Этот способ управления активной мощностью обладает следующими недостатками:
1). Параметры ПИД-регулятора активной мощности и модели объекта управления определяют при вводе каждого агрегата в эксплуатацию после очередного ремонта по результатам специальных испытаний, выполняемых в процессе пуско-наладочных работ.
2). Системы управления, реализующие этот способ, и после коррекции комбинаторной зависимости (1), выполненной при натурных энергетических испытаниях головного образца, не обеспечивают требуемую точность регулирования активной мощности гидроагрегата во всем рабочем диапазоне изменения нагрузки на генератор. В частности, натурные энергетические испытания гидроагрегатов Волжской ГЭС показали, что в диапазоне нагрузок (80÷60) МВт кпд натурной турбины снижается на (3,0÷4,0)%, а в диапазоне нагрузок (115÷120) МВт кпд натурной турбины уменьшается на 2% и более по сравнению с заводской характеристикой (Технический отчет по натурным энергетическим испытаниям гидроагрегата №19 Волжской ГЭС. - «Фирма ОРГРЭС», М., 2006 г.). Это объясняется существенной нелинейностью функциональных зависимостей активной мощности, расхода воды и гидравлических потерь от величины открытия направляющего аппарата и угла разворота лопастей рабочего колеса. Поэтому ПИД-регулятор с постоянными настроечными параметрами не может обеспечить требуемую точность управления во всем рабочем диапазоне нагрузок на генератор.
3). Каждый гидроагрегат имеет индивидуальные особенности, влияющие на величину кпд турбины и выбор оптимальных управляющих воздействий (разные значения неконтролируемых потерь расхода воды через зазоры между лопастями рабочего колеса и корпусом разных турбин; различия по профилю и размерам лопастей рабочих колес и др). Поэтому гидроагрегаты работают с пониженным кпд и поддерживают заданную активную мощность с большими значениями статической и динамической погрешностей регулирования при повышенном расходе воды (особенно вблизи границ рабочего диапазона изменения нагрузки на генератор).
В качестве прототипа принят способ адаптивной коррекции комбинаторной зависимости поворотно-лопастной турбины, заключающийся в изменении величины открытия направляющего аппарата и угла установки лопастей рабочего колеса турбины путем подачи пробных воздействий на сервомоторы механизмов поворота лопастей рабочего колеса и открытия направляющего аппарата при заданном напоре и мощности. (Патент на изобретение RU 2302551 С2, МПК F03B 15/00, опубликовано 10.07.2007, бюл. №19).
В этом способе параметры ПИД-регулятора активной мощности определяют при вводе каждого агрегата в эксплуатацию (в том числе после очередного ремонта) в процессе пуско-наладочных работ с применением линейной модели процессов преобразования энергии в гидроагрегате в виде передаточной функции, которую определяют в процессе этих же пуско-наладочных работ. Затем выявляют наличие несоответствия параметров регулирования турбины, полученных по известной на данный момент комбинаторной зависимости (1), оптимальным значениям. Затем отключают комбинатор, определяют направление коррекции и производят поиск оптимальных параметров, при которых прирост расхода воды с изменением положения лопастей рабочего колеса был бы равен приросту расхода воды при изменении открытия направляющего аппарата.
Для этого формируют пробные импульсные воздействия, производя их одновременно, но в противоположных направлениях, группируя их по парам. Ступенчато подают пробные импульсные воздействия на сервомоторы механизмов поворота лопастей рабочего колеса и открытия направляющего аппарата, измеряя приращение электрической мощности агрегата очередной ступени и фиксируя знаки изменения электрической мощности агрегата. В качестве признака для выбора корректирующей пары импульсов используют положительный прирост электрической мощности, причем коррекцию продолжают до момента, когда приращение мощности агрегата станет равным нулю. При этом параметры регулирования накапливают в блоке памяти для последующего их использования в качестве оптимальных при возникновении режима агрегата, соответствующего по напору и мощности.
Техническая задача изобретения-прототипа заключается в обеспечении коррекции комбинаторной зависимости без измерений расхода воды с возможностью оптимизации параметров регулирования мощности (получения максимально возможного кпд) при минимальном расходе воды и с учетом индивидуальных отличительных особенностей поворотно-лопастной турбины.
Прототип имеет следующие основные недостатки:
- параметры ПИД-регулятора активной мощности и модели объекта управления определяют при вводе каждого агрегата в эксплуатацию после очередного ремонта по результатам специальных испытаний, выполняемых в процессе пуско-наладочных работ;
- оптимальные параметры комбинаторной зависимости определяют по результатам специальных экспериментов с выведенной из работы комбинаторной зависимостью, выполняемых в процессе эксплуатации гидроагрегата. Управление активной мощностью выполняют после определения оптимальных параметров комбинаторной зависимости, что приводит к увеличению времени регулирования;
- в процессе коррекции комбинаторной зависимости на сервомоторы подают пробные импульсные воздействия, направленные вначале на увеличение (уменьшение), а затем на уменьшение (увеличение) управляющих воздействий. Это приводит к повышенному износу подвижных узлов механизмов открытия направляющего аппарата и разворота лопастей рабочего колеса. Кроме того, часть таких пробных импульсных воздействий на сервомоторы системы управления неизбежно поворачивают лопатки направляющего аппарата и (или) лопасти рабочего колеса в направлении, противоположном от оптимальных для этого режима положений. В эти моменты возникают импульсные увеличения гидравлических потерь (гидравлические удары на входных кромках лопастей рабочего колеса и завихрения потока воды). Это в свою очередь приводит к импульсным увеличениям вибрации и, как следствие, к снижению усталостной прочности шпилек крепления крышки турбины и других деталей.
Техническим результатом заявленного изобретения является обеспечение минимальной среднеквадратической погрешности управления активной мощностью гидроагрегата при минимальном расходе воды и минимальной мощности, затраченной на управление; снижение динамических нагрузок на основные узлы турбины; уменьшение износа исполнительных механизмов системы управления; уменьшение объема пуско-наладочных работ при вводе гидроагрегата в эксплуатацию после очередного ремонта.
Технический результат достигают за счет: измерения перепада давления в расходомерном створе турбины; применения адаптивной системы автоматического управления активной мощностью с обучаемой моделью гидроагрегата, описывающей нелинейные зависимости мощности турбины и перепада давления в расходомерном створе турбины от величины открытия направляющего аппарата и угла установки лопастей рабочего колеса; формирования управляющих воздействий в процессе эксплуатации гидроагрегата по алгоритму, который получают минимизацией функционала обобщенной работы с помощью принципа максимума. Функционал обобщенной работы образуют из нормированной суммы квадратов невязки между требуемыми и реализованными значениями активной мощности, перепада давления в расходомерном створе турбины и мощности, затраченной на управление сервомоторами. Следовательно, его минимум достигается при минимальных значениях каждого слагаемого, а минимальный перепад давления в расходомерном створе турбины создается при минимальном расходе воды. При этом система адаптивного управления формирует плавно изменяющиеся входные воздействия на сервомоторы исполнительных механизмов, которые поворачивают лопатки направляющего аппарата и лопасти рабочего колеса только в направлении их оптимальных положений. Поэтому заявленный способ снижает динамические нагрузки на основные узлы турбины и уменьшает износ исполнительных механизмов системы управления. Алгоритм системы управления активной мощностью формируется и адаптируется к индивидуальным особенностям каждого гидроагрегата автоматически в процессе эксплуатации. Поэтому из пуско-наладочных работ, выполняемых при вводе гидроагрегатов в эксплуатацию после очередного ремонта, исключают специальные испытания, предназначенные для определения параметров системы управления.
Сущность изобретения выражается в совокупности существенных признаков, достаточной для достижения указанного технического результата, которая включает:
а) признаки, совпадающие с признаками способов-аналогов:
управляют активной мощностью гидроагрегата изменением величины открытия направляющего аппарата и угла установки лопастей рабочего колеса турбины за счет формирования и подачи управляющих воздействий на сервомоторы механизмов открытия направляющего аппарата и разворота лопастей рабочего колеса;
управляющие воздействия на сервомоторы формируют с помощью регулятора активной мощности и комбинатора по алгоритмам, которые составляют с применением модели гидроагрегата, содержащей комбинаторную зависимость и основное энергетическое уравнение гидроагрегата с поворотно-лопастной турбиной;
осуществляют индивидуальную коррекцию комбинаторной зависимости каждой турбины в процессе управления;
б) признаки, отличающиеся от признаков способов-аналогов:
в процессе управления измеряют текущие значения перепада давления в расходомерном створе турбины;
в математическую модель гидроагрегата включают регрессионные уравнения, описывающие нелинейные зависимости мощности турбины и перепада давления в расходомерном створе турбины от величины открытия направляющего аппарата и угла установки лопастей рабочего колеса;
переменные состояния и параметры модели гидроагрегата определяют в процессе управления активной мощностью с помощью рекуррентного алгоритма метода наименьших квадратов, в котором используют результаты измерений активной мощности, перепада давления в расходомерном створе турбины, угла разворота лопастей рабочего колеса и величины открытия направляющего аппарата;
формируют управляющее воздействие на сервомотор механизма открытия направляющего аппарата и корректируют комбинаторную зависимость с помощью рекуррентного алгоритма адаптивного управления, который получают минимизацией функционала обобщенной работы с помощью принципа максимума с учетом ограничений, заданных моделью гидроагрегата и заводскими характеристиками;
функционал обобщенной работы образуют из нормированной суммы квадратов невязки между требуемыми и реализованными значениями активной мощности, перепада давления в расходомерном створе турбины и мощности, затраченной на управление.
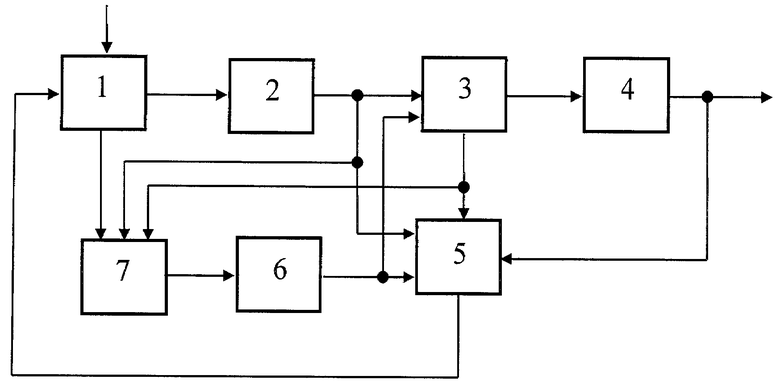
Сущность изобретения поясняет упрощенная блок-схема, изображенная на фигуре, которая включает: блок 1, формирующий управляющее воздействие на сервомотор механизма открытия направляющего аппарата; механизм открытия направляющего аппарата 2; турбину 3; генератор 4; блок 5 с обучаемой моделью гидроагрегата; механизм поворота лопастей рабочего колеса 6 и комбинатор 7.
В заявленном способе, как и в способах-аналогах, управляют активной мощностью гидроагрегата за счет изменения величины открытия направляющего аппарата и положения лопастей рабочего колеса турбины. Для этого в дискретные моменты времени tk=k·Δt, которые сменяют последовательно, формируют управляющие воздействия на сервомоторы механизмов открытия направляющего аппарата и разворота лопастей рабочего колеса.
В начальный момент времени t0 в блоке 1 формируют управляющее воздействие u2(t0) на сервомотор механизма открытия направляющего аппарата 2 с помощью регулятора, на вход которого подают сигнал рассогласования (невязку) между требуемым Nmp(t0) и реализованным N(t0) значениями активной мощности гидроагрегата. Управляющее воздействие u1(t0) на сервомотор механизма поворота лопастей рабочего колеса 6 в момент времени t0 формируют в блоке 7 (комбинаторе). При этом используют параметры регулятора активной мощности и комбинаторную зависимость, найденные по заводским характеристикам гидроагрегата.
Затем к блоку 1 системы управления подсоединяют блок 5 с обучаемой моделью гидроагрегата. В обучаемую модель гидроагрегата включают:
- комбинаторную зависимость (1), дополненную корректирующим воздействием ξ1(tk):

- основное энергетическое уравнение гидроагрегата с поворотно-лопастной турбиной (3), в котором учитывают регрессионное уравнение, описывающее нелинейную зависимость мощности турбины от величины открытия направляющего аппарата s(tk):

где bj, ci - параметры, подлежащие идентификации в процессе обучения модели гидроагрегата;  - регрессионная модель неизвестной зависимости функции ctg(α1(tk)) от величины открытия направляющего аппарата; δN(tk) - неконтролируемые потери мощности, текущие значения которых определяют в процессе обучения модели гидроагрегата;
- регрессионная модель неизвестной зависимости функции ctg(α1(tk)) от величины открытия направляющего аппарата; δN(tk) - неконтролируемые потери мощности, текущие значения которых определяют в процессе обучения модели гидроагрегата;
- регрессионное уравнение, описывающее нелинейную зависимость перепада давления Δр(tk) в расходомерном створе турбины от величины открытия направляющего аппарата и угла установки лопастей рабочего колеса:

где aj - параметры, подлежащие идентификации в процессе обучения модели гидроагрегата; δр(tk) - погрешность регрессионной модели, текущее значение которой определяют в процессе обучения модели гидроагрегата;
- уравнения динамики исполнительных механизмов открытия направляющего аппарата и разворота лопастей рабочего колеса, выполненных в виде следящих приводов с постоянными времени τφ и τs:


- модель ПИ-регулятора управляющих воздействий u2(tk) на сервомотор механизма открытия направляющего аппарата:


где ψ(tk) - выходной сигнал интегрирующего блока ПИ-регулятора; ξ2(tk), ξ3(tk) - входные сигналы ПИ-регулятора.
В момент времени tk измеряют активную мощность, перепад давления в расходомерном створе турбины, угол установки лопастей рабочего колеса и величину открытия направляющего аппарата. Затем определяют текущие оценки параметров и неконтролируемых потерь мощности δN(tk) и давления δp(tk) по рекуррентному алгоритму метода наименьших квадратов с использованием результатов этих измерений (обучают модель гидроагрегата). Полученные оценки параметров обученной модели гидроагрегата передают в блок 1, где их используют в алгоритмах коррекции комбинаторной зависимости и формирования управляющего воздействия на сервомотор механизма открытия направляющего аппарата турбины.
Корректирующее воздействие ξ1(tk) на комбинаторную зависимость и входные сигналы ПИ-регулятора ξ2(tk) и ξ3(tk) формируют по алгоритму адаптивного управления, который получают минимизацией функционала обобщенной работы

с помощью принципа максимума по переменным ξ1(tj), ξ2(tj) и ξ3(tj) с учетом ограничений, заданных уравнениями (4)-(10) модели гидроагрегата и заводскими характеристиками, где Namp(tj) - требуемое значение активной мощности в момент времени tj; δNдоп - допустимая погрешность регулирования активной мощности; Δрн - нормирующий множитель; σs, σφ - пределы основных погрешностей измерений величины открытия направляющего аппарата и угла установки лопастей рабочего колеса. После этого в блоке 7 по уравнению (4) формируют управляющее воздействие u2(tk) на сервомотор механизма разворота лопастей рабочего колеса 6.
Переменные ξ1(tk), ξ2(tk) и ξ3(tk), сформированные по алгоритму адаптивного управления, обращают в минимум функционал обобщенной работы (11). Но функционал (11) образован суммой квадратов слагаемых, поэтому алгоритм адаптивного управления, обращающий в минимум этот функционал, обеспечивает в любом режиме работы гидроагрегата минимально возможные значения каждого слагаемого. Следовательно, заявленный способ во всех режимах работы обеспечивает минимальную среднеквадратическую погрешность управления активной мощностью (первое слагаемое), минимальный расход воды (второе слагаемое) и минимальные затраты мощности на управление (остальные слагаемые).
В моменты времени tk система адаптивного управления формирует управляющие воздействия, которые перемещают лопатки направляющего аппарата и лопасти рабочего колеса в оптимальные (для этого момента времени) положения. Поэтому заявленный способ снижает динамические нагрузки на основные узлы турбины и уменьшает износ исполнительных механизмов системы управления.
Алгоритм управления активной мощностью и комбинаторную зависимость формируют и адаптируют к индивидуальным особенностям каждого гидроагрегата автоматически по результатам измерений переменных состояния, выполняемых в процессе эксплуатации. Поэтому из пуско-наладочных работ, выполняемых при вводе гидроагрегатов в эксплуатацию, исключают испытания, предназначенные для настройки параметров системы управления.
Изобретение относится к способам адаптивного управления активной мощностью гидроагрегата ГЭС с поворотно-лопастной турбиной. Управляют активной мощностью изменением величины открытия направляющего аппарата (НА) и угла установки лопастей рабочего колеса (РК) турбины за счет формирования и подачи управляющих воздействий на сервомоторы механизмов открытия НА и разворота лопастей РК. Управляющие воздействия на сервомоторы формируют с помощью регулятора активной мощности и комбинатора по алгоритмам, которые составляют с применением модели гидроагрегата (Г). В модель включают регрессионные уравнения, описывающие нелинейные зависимости мощности турбины и перепада давления в расходомерном створе турбины от величины открытия НА и угла установки лопастей РК. Переменные состояния и параметры модели Г вычисляют в процессе управления активной мощностью с помощью рекуррентного алгоритма метода наименьших квадратов. Формируют управляющее воздействие на сервомотор механизма открытия НА и корректируют комбинаторную зависимость с помощью рекуррентного алгоритма адаптивного управления, который получают минимизацией функционала обобщенной работы, который образуют из нормированной суммы квадратов невязки между требуемыми и реализованными значениями активной мощности, перепада давления в расходомерном створе турбины и мощности, затраченной на управление. Изобретение направлено на обеспечение минимальной среднеквадратической погрешности управления активной мощностью Г при минимальном расходе воды и минимальной мощности, затраченной на управление. 1 ил.
Способ адаптивного управления активной мощностью гидроагрегата ГЭС с поворотно-лопастной турбиной, в котором управляют активной мощностью гидроагрегата изменением величины открытия направляющего аппарата и угла установки лопастей рабочего колеса турбины за счет формирования и подачи управляющих воздействий на сервомоторы механизмов открытия направляющего аппарата и разворота лопастей рабочего колеса; управляющие воздействия на сервомоторы формируют с помощью регулятора активной мощности и комбинатора по алгоритмам, которые составляют с применением модели гидроагрегата, содержащей комбинаторную зависимость и основное энергетическое уравнение гидроагрегата с поворотно-лопастной турбиной; осуществляют индивидуальную коррекцию комбинаторной зависимости каждой турбины в процессе управления; отличающийся тем, что измеряют текущие значения перепада давления в расходомерном створе турбины; в математическую модель гидроагрегата включают регрессионные уравнения, описывающие нелинейные зависимости мощности турбины и перепада давления в расходомерном створе турбины от величины открытия направляющего аппарата и угла установки лопастей рабочего колеса; переменные состояния и параметры модели гидроагрегата определяют в процессе управления активной мощностью с помощью рекуррентного алгоритма метода наименьших квадратов, в котором используют результаты измерений активной мощности, перепада давления в расходомерном створе турбины, угла разворота лопастей рабочего колеса и величины открытия направляющего аппарата; формируют управляющее воздействие на сервомотор механизма открытия направляющего аппарата и корректируют комбинаторную зависимость с помощью рекуррентного алгоритма адаптивного управления, который получают минимизацией функционала обобщенной работы с помощью принципа максимума с учетом ограничений, заданных моделью гидроагрегата и заводскими характеристиками; функционал обобщенной работы образуют из нормированной суммы квадратов невязки между требуемыми и реализованными значениями активной мощности, перепада давления в расходомерном створе турбины и мощности, затраченной на управление.
| СПОСОБ АДАПТИВНОЙ КОРРЕКЦИИ КОМБИНАТОРНОЙ ЗАВИСИМОСТИ ПОВОРОТНО-ЛОПАСТНОЙ ГИДРОТУРБИНЫ | 2005 |
|
RU2302551C2 |
| УСТРОЙСТВО ДЛЯ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ АКТИВНОЙ МОЩНОСТЬЮ ГИДРОАГРЕГАТА С ПОВОРОТНО- ЛОПАСТНОЙ ТУРБИНОЙ | 1972 |
|
SU420801A1 |
| РЕГУЛЯТОР ГИДРОТУРБИНЫ'i'fi "\ | 0 |
|
SU274993A1 |
| Автомат для печатания ярлыков | 1979 |
|
SU825344A1 |
| JP 5180141 A, 20.07.1993. | |||

