Изобретение относится к гидравлическим источникам питания, предназначенным, например, для обслуживания гидроприводов металлорежущих станков, испытательного оборудования, а также летательных аппаратов при необходимости поддержания заданного давления на входе в гидропривод при широком диапазоне изменения потребляемого расхода.
Известен способ управления и поддержания в заданных пределах выходного давления насосной станции (см, например, “Учебный курс гидравлики” фирмы Mannesmann Rexroth RSU 00 301/5.80, 1980, стр.186, рис.4), включающий задание требуемого номинального давления с помощью начального поджатия пружины предохранительного клапана, который открывают в случае превышения заданного значения номинального давления и сбрасывают излишнюю рабочую жидкость в бак, при этом пределы допустимого изменения давления регулируют с помощью установки пружин различной жесткости.
Недостатком способа является низкая точность поддержания давления, причем погрешность этого поддержания зависит от кратности изменения расхода и жесткости пружины предохранительного клапана. Кроме того, при использовании данного способа отсутствует возможность изменения величины задаваемого давления в процессе работы.
Наиболее близким по технической сущности к заявленному способу управления и стабилизации является выбранный в качестве прототипа способ регулирования производительности насоса (см., например, Ю.Н.Калачев и В.Н.Медведев “АП-140Н-Специализированные преобразователи частоты для управления насосами и вентиляторами”, газета “Новости приводной техники” №4(12), 04.2002 г.). Способ включает формирование разностного сигнала между задаваемым сигналом и сигналом, пропорциональным давлению рабочей жидкости на выходе насосной станции и снимаемым с датчика давления, установленного на выходе насоса. Этот сигнал поступает на вход пропорционально-интегро-дифференциального регулятора (ПИД - регулятора) и после соответствующей коррекции его подают на вход преобразователя частоты (ПЧ), с помощью которого изменяют скорость вращения двигателя, за счет чего поддерживают давление на входе гидросистемы потребителя в заданных пределах в зависимости от потребляемого расхода.
Однако при необходимости изменения потребляемого расхода в широком диапазоне, например, в 10... 15 раз, управление и стабилизация давления с помощью данного способа крайне затруднены. Так, при малых расходах рабочей жидкости насосной станции Qн и больших выходных давлениях рабочей жидкости Рпотр коэффициент дросселирования рабочей жидкости или коэффициент гидросистемы  мал, а коэффициент
мал, а коэффициент  усиления звена, описывающий гидросистему (например, в рамках теории регулирования), как и постоянная времени гидросистемы -
усиления звена, описывающий гидросистему (например, в рамках теории регулирования), как и постоянная времени гидросистемы -  определяемая отношением коэффициента сжимаемости kсж рабочей жидкости к коэффициенту гидросистемы kг, принимают наибольшие значения.
определяемая отношением коэффициента сжимаемости kсж рабочей жидкости к коэффициенту гидросистемы kг, принимают наибольшие значения.
Известна насосная станция (см., например, SU 412398 А1, 25.01.1974, F 04 В 23/04), содержащая регулируемый и нерегулируемый насосы, а также исполнительный элемент, на входе которого поддерживают постоянное давление независимо от величины потребляемого исполнительным элементом расхода, дроссель, переливной клапан, бак для рабочей жидкости, регулятор расхода и гидравлически управляемый распределитель, золотник которого находится под воздействием, с одной стороны, давления, определяемого перепадом на дросселе, а с другой стороны, пружины, благодаря чему нерегулируемый насос в зависимости от потребляемого расхода подсоединяют либо к напорной магистрали, либо к баку, либо и к баку и к напорной магистрали.
Недостатками известной насосной станции являются:
- большая потеря потребляемой энергии, соответственно низкий КПД и, как следствие, нагрев масла (рабочей жидкости);
- сложность конструкции;
- невозможность перенастройки рабочего давления рабочей жидкости в процессе работы насосной станции.
Наиболее близким аналогом-прототипом является насосная станция (см., например, “Учебный курс гидравлики” фирмы Mannesmann Rexroth RSU 00 301/5.80, 1980, стр.186, рис.4).
Эта насосная станция содержит вертикально расположенный электродвигатель, установленный на крышке емкости для рабочей жидкости, насос, погруженный в рабочую жидкость, датчик давления и предохранительный переливной клапан.
Недостатком прототипа является повышенный нагрев рабочей жидкости в процессе работы станции, вызванный конструктивными особенностями, например, наличием воздушной прослойки между верхним уровнем рабочей жидкости и крышкой емкости.
Задачей предлагаемого изобретения является повышение точности и устойчивости системы регулирования, а также увеличение диапазона регулирования расхода, повышение надежности и ресурса насосной станции и уменьшение нагрева рабочей жидкости.
Сущность изобретения состоит в том, что в способе управления и стабилизации выходного давления насосной станции, включающем формирование сигнала управления расходом рабочей жидкости насосной станции путем получения разностного сигнала между задаваемым сигналом и сигналом, пропорциональным давлению этой рабочей жидкости на выходе насосной станции, согласно изобретению полученный разностный сигнал вначале усиливают с коэффициентом усиления k0, затем одновременно пропускают по двум каналам, а потом суммируют сигналы, прошедшие по этим каналам, причем в первом канале сигнал усиливают с коэффициентом усиления, соответствующим коэффициенту сжимаемости рабочей жидкости, а во втором канале сигнал вначале усиливают с первым переменным коэффициентом усиления kпер1, затем умножают на второй переменный коэффициент усиления kпер2, а потом интегрируют, а суммарный сигнал одновременно подают в качестве сигнала управления расходом рабочей жидкости и во второй канал в качестве второго переменного коэффициента усиления, причем первый переменный коэффициент усиления выбирают обратно пропорциональным удвоенной величине стабилизированного давления Рпотр рабочей жидкости на выходе насосной станции и формируют путем соответствующего преобразования задаваемого сигнала, а второй переменный коэффициент усиления формируют в виде сигнала, пропорционального расходу Qн рабочей жидкости насосной станции путем соответствующего преобразования сигнала управления расходом рабочей жидкости.
Сущность изобретения состоит в том, что в насосной станции, содержащей насос, гидравлическим входом соединенный с баком с рабочей жидкостью, выполненным в виде емкости с крышкой, гидравлическим выходом через гидроэлементы соединенный с выходным трубопроводом станции, входной трубопровод которой после гидросистемы потребителя подсоединен к баку, и рабочим валом механически связанный с электродвигателем, и установленный в выходном трубопроводе насосной станции датчик давления, согласно изобретению в нее введены блок адаптации, блок теплоотводящих элементов и вентилятор, а также сумматор, пропорционально - интегро-дифференциальный регулятор (ПИД - регулятор) и усилитель, причем блок теплоотводящих элементов закреплен в крышке емкости и нижней частью помещен в рабочую жидкость, а верхней частью расположен над этой крышкой, вентилятор установлен с возможностью обдува электродвигателя, а также крышки емкости и верхней части блока теплоотводящих элементов, ПИД - регулятор выходом через преобразователь частоты электрически связан со входом электродвигателя, а датчик давления электрическим выходом подключен к первому входу усилителя, выходом соединенного с первым входом сумматора, который вторым входом подключен к первому электрическому входу насосной станции, при этом блок адаптации первым входом подключен к выходу сумматора, вторым входом соединен с первым электрическим входом насосной станции, а выход блока адаптации одновременно подключен ко входу ПИД - регулятора и к своему третьему входу, причем второй вход усилителя соединен со вторым электрическим входом насосной станции, а насос выполнен в виде нерегулируемой ролико-лопастной машины.
При этом в насосной станции вентилятор помещен в кожух, установленный над электродвигателем, количество элементов блока теплоотводящих элементов в насосной станции выбирают не менее двух, причем первый элемент блока устанавливают во входном трубопроводе насосной станции.
Предлагаемый способ управления выходным давлением рабочей жидкости и стабилизации этого давления и насосная станция для осуществления способа позволяют повысить коэффициент полезного действия (КПД), увеличить диапазон регулирования расхода, расширить область управления и осуществить гибкость управления в процессе работы, а также повысить надежность и ресурс, уменьшить нагрев рабочей жидкости, повысить точность и устойчивость системы.
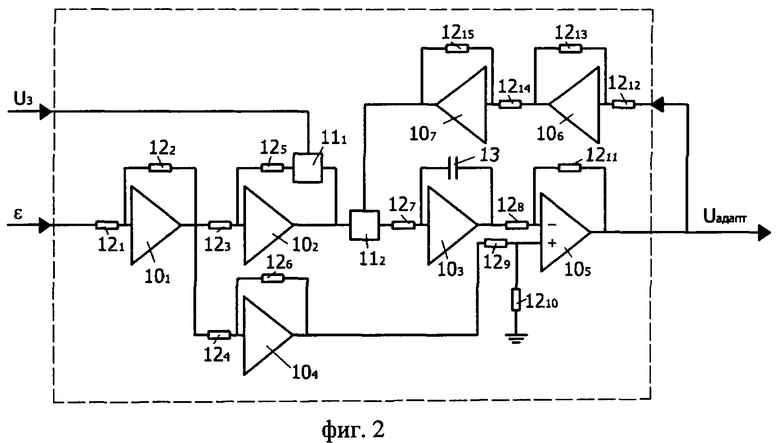
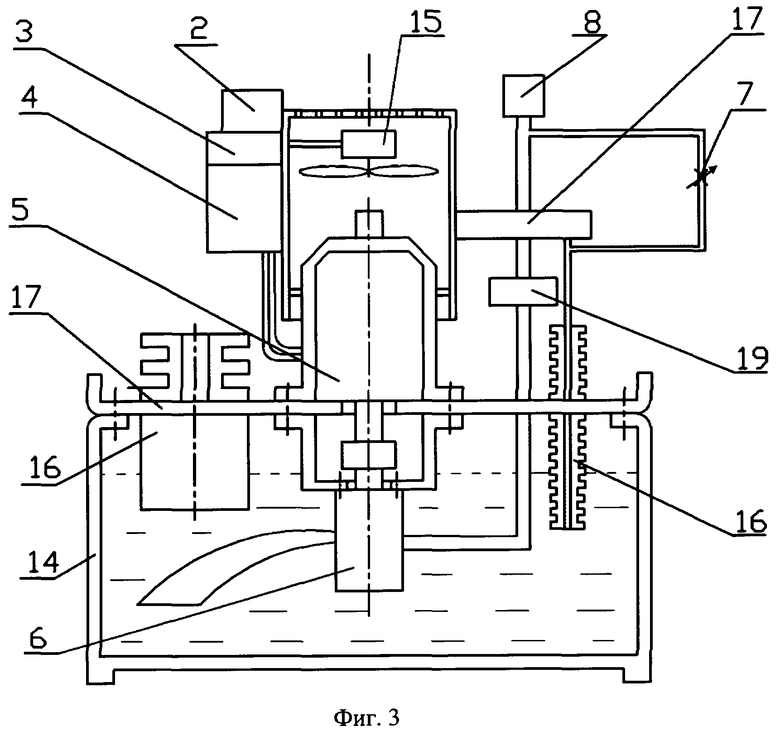
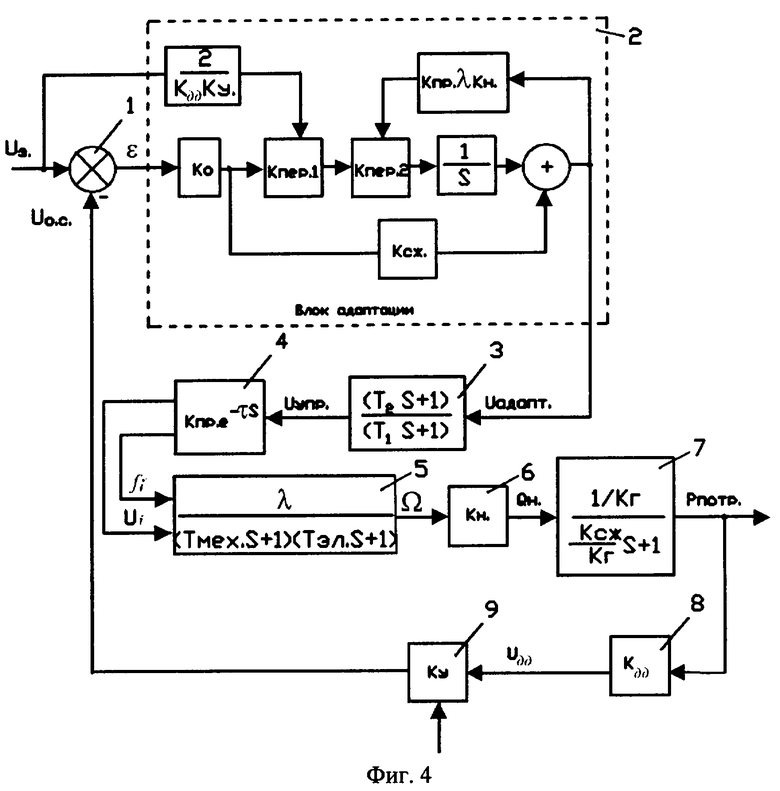
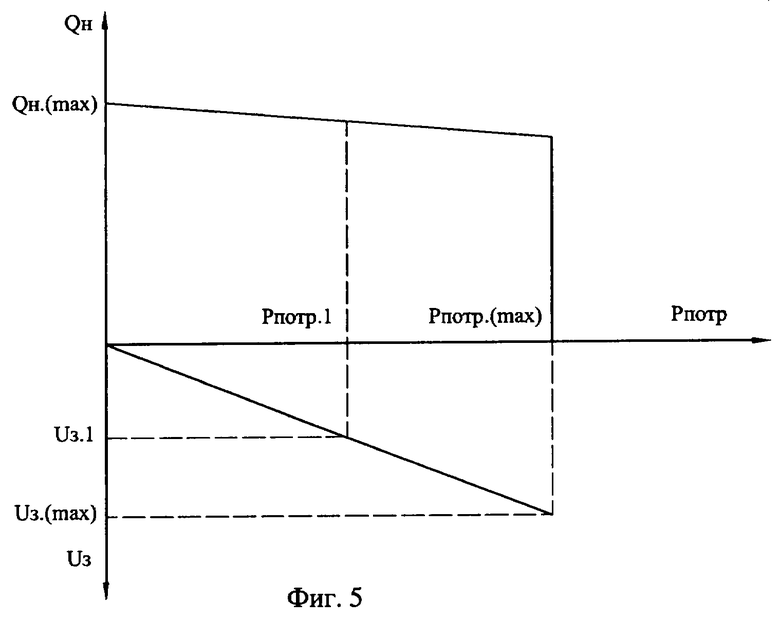
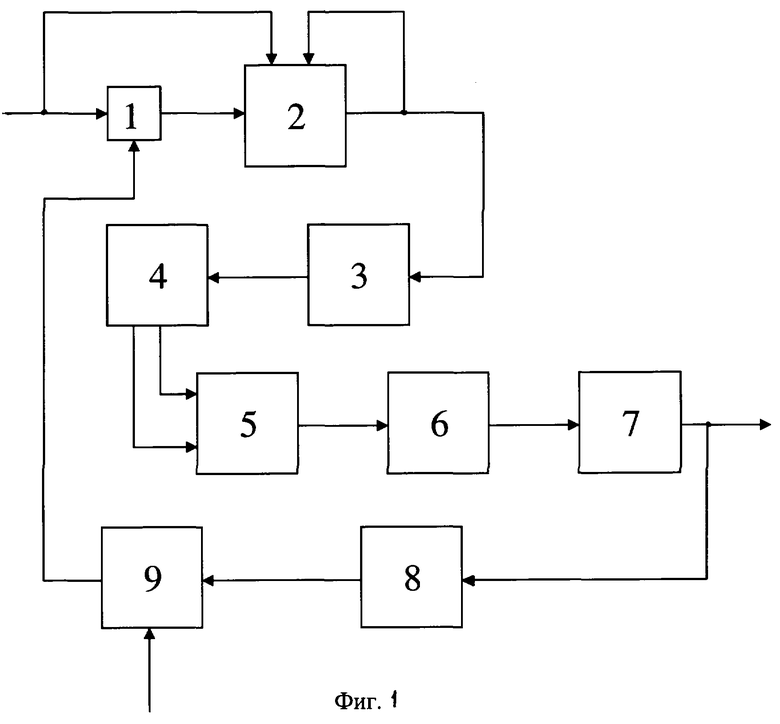
На фиг.1 приведена функциональная блок - схема насосной станции, на фиг.2 представлена принципиальная электрическая схема блока адаптации, на фиг.3 приведен чертеж общего вида насосной станции, а на фиг.4 показана структурная схема следящей системы этой станции, на фиг.5 приведена регулировочная характеристика.
Насосная станция содержит (фиг.1) сумматор 1, выполненный, например, на аналоговой микросхеме К140УД7 (см., например, “Каталог интегральных схем”. Операционные усилители. ФГУП Центральное конструкторское бюро “Дейтон”, 2001 г., стр.26) и предназначенный для формирования разностного сигнала (ошибки ε ) между задаваемым сигналом Uз и сигналом обратной связи Uос (фиг.4). При этом сумматор 1 первым входом подключен к первому (электрическому) входу насосной станции, а выходом соединен с первым входом блока 2 адаптации, предназначенного для формирования соответствующего сигнала Uадапт. Блок 2 адаптации вторым входом также подключен к первому (электрическому) входу насосной станции, а выходом одновременно соединен со своим третьим входом и с первым входом ПИД - регулятора 3, предназначенного для формирования скорректированного сигнала Uупр и выполненного в виде корректора сигнала (см., например, Ю.Н.Калачев и В.Н.Медведев “АП-140Н - Специализированные преобразователи частоты для управления насосами и вентиляторами”, газета “Новости приводной техники” №4(12), 04.2002 г.). Выход ПИД - регулятора 3 подключен ко входу преобразователя 4 частоты (ПЧ), выполненного в виде соответствующего устройства (см., например, “Руководство по монтажу” фирмы Lenze; Internet: http:/www.Lenze.com) и предназначенного для регулирования скорости вращения вала (на фиг. не показан) электродвигателя 5 за счет изменения частоты и амплитудных значений напряжения, поступающего на его вход. Электродвигатель 5 выполнен в виде асинхронного электродвигателя серии АИР 100L6 (см., например, “Каталог продукции” завода “Электродвигатель”, 1997, республика Беларусь, 212649, г. Могилев, ул. Королева, 8) и предназначен для вращения механически жестко связанного с валом электродвигателя вала (на фиг. не показано) насоса 6. Насос 6 выполнен в виде ролико-лопастной гидромашины (см. например, SU 992821 А1, 30.01.83, F 04 С 2/08) и предназначен для подачи рабочей жидкости (например, масла АМГ - 10Е) по трубопроводу (на фиг. не показан) на вход гидросистемы 7, выходом соединенной с системой (на фиг. не показан) потребителя.
При этом выбор гидромашины основан на том, что ее конструктивное исполнение обеспечивает величину давления Рстр страгивания вала этой машины (без нагрузки) Рстр=(0,1-0,5) кг/см2 за счет радиальной и осевой разгрузки, что, в свою очередь, позволяет работать на малых оборотах (Ω =10 с-1).
На выходе гидросистемы 7 (в выходном трубопроводе насосной станции) установлен датчик 8 давления, выполненный в виде датчика КР5-2-4.0-0.5 (ТУ 4212-174-00227459-99, г.Орел., АО “Орлике”) и предназначенный для получения сигнала, пропорционального выходному давлению рабочей жидкости. Электрический выход датчика 8 соединен с первым входом усилителя 9, выполненного на микросхеме К140УД7 и предназначенного для соответствующего преобразования выходного сигнала датчика 8. Усилитель 9 вторым входом подключен ко второму (электрическому) входу насосной станции, а выходом соединен со вторым входом сумматора 1.
Блок 2 адаптации содержит (фиг.2) семь операционных усилителей (10-16), выполненных на микросхемах, например, К140УД7, два блока (17 и 18), пятнадцать резисторов (19-33) типа С2 - 33 (см., например, справочник “Резисторы” РД 11 0856.1-92. РНИИ “Электронстандарт”, стр.48), причем величина сопротивления каждого из резисторов выбрана из условий выполнения соотношений, обеспечивающих получение заданных коэффициентов усиления на соответствующем операционном усилителе, а также конденсатор 34 (см., например, справочник “Конденсаторы”, М.: Радио и связь, 1984, стр.23)
При этом резистор 19 входом соединен с первым входом блока 2 адаптации, а выходом одновременно подключен к инверсному входу операционного усилителя 10 и входу резистора 20, который своим выходом одновременно соединен с выходом операционного усилителя 10 и со входами резисторов 21 и 22. Выход резистора 22 одновременно подсоединен к инверсному входу операционного усилителя 13 и входу резистора 24, который своим выходом одновременно подключен к выходу операционного усилителя 13 и входу резистора 27. Выход резистора 27 соединен с неинверсным входом операционного усилителя 14 и со входом резистора 28, выход которого “заземлен” (подсоединен к нулевому потенциалу). Выход резистора 21 подключен к инверсному входу операционного усилителя 11 и ко входу резистора 23, который своим выходом соединен с первым входом блока 17 умножения, который своим вторым входом подключен к первому электрическому входу насосной станции. Выход блок умножения 17 одновременно соединен с выходом операционного усилителя 11 и с первым входом блока умножения 18, который вторым входом одновременно подключен к выходу операционного усилителя 16 и к выходу резистора 33. Вход резистора 32 подсоединен одновременно к инверсному входу операционного усилителя 16 и к выходу резистора 32. Вход резистора 32 подключен к выходам операционного усилителя 15 и резистора 21, который своим входом подсоединен к инверсному входу операционного усилителя 15 и к выходу резистора 30, вход которого подключен к третьему входу блока 2 адаптации. Выход блока умножения 18 соединен со входом резистора 25, который выходом одновременно подключен к инверсному входу операционного усилителя 12 и ко входу конденсатора 34. Выходом этот конденсатор одновременно подсоединен к выходу операционного усилителя 12 и ко входу резистора 26, который выходом одновременно подключен к инверсному входу операционного усилителя 14 и ко входу резистора 29. Выход резистора 29 соединен с выходом операционного усилителя 14, который одновременно подключен к выходу блока 2 адаптации и к его третьему входу.
Насосная станция содержит также (фиг.3) бак 35 для рабочей жидкости, вентилятор 36 с независимым электропитанием (на фиг. не показано), блок 37 теплоотводящих элементов, установленных на крышке 38 бака 35, предохранительный клапан 39, установленный в выходном трубопроводе, предназначенный для ограничения давления рабочей жидкости в гидросистеме 7 и выполненный в виде соответствующего устройства (см., например, “Учебный курс гидравлики” фирмы Mannesmann Rexroth RSU 00 301/5.80, 1980, стр.113), гидравлический фильтр 40, установленный на выходе насосной станции, предназначенный для очистки рабочей жидкости и выполненный в виде соответствующего устройства (см., например, “Учебный курс гидравлики” фирмы Mannesmann Rexroth RSU 00 301/5.80,1980, стр.165).
Блоки и элементы насосной станции, соединенной описанным образом (см. фиг.1), образуют следящую систему (фиг.4), на структурной схеме которой обозначено:
Рпотр - стабилизированное давление на выходе насосной станции (на входе к потребителю);
kг - коэффициент дросселирования гидросистемы;
kсж - коэффициент сжимаемости, определяемый сжимаемостью рабочей жидкости и податливостью трубопровода;
Qн - расход насоса (расход рабочей жидкости насосной станции);
kн - удельный объем насоса;
Ω - угловая скорость электродвигателя;
Tэл=L/R - электрическая постоянная времени электродвигателя;
Тмех=J/kэкв - механическая постоянная времени электродвигателя;
T1 - постоянная времени форсирующего звена, формируемого в ПИД - регуляторе;
T=3T1 - время (с) выхода электродвигателя на номинальный режим работы;
T2 - постоянная времени апериодического звена, формируемого в ПИД-регуляторе;
J - суммарный момент инерции (момент инерции электродвигателя с учетом момента инерции насоса и соединительной муфты);
 - коэффициент электродвигателя;
- коэффициент электродвигателя;
kэкв - коэффициент, учитывающий жесткость механической характеристики электродвигателя и вязкость рабочей жидкости;
kI - коэффициент пропорциональности между вращающим моментом на валу электродвигателя и током в его статорной обмотке;
R - активное сопротивление статорной обмотки;
L - индуктивное сопротивление статорной обмотки;
fi - текущее значение частоты напряжения, подаваемого на статорную обмотку;
Ui - текущее значение напряжения статорной обмотки;
τ - время чистого запаздывания, определяемое временем обновления информации на выходе ПЧ (~1 мс);
kпр - коэффициент передачи преобразователя частоты;
Uадапт - напряжение, поступающее на вход ПИД - регулятора;
Uупр - напряжение, поступающее на вход ПЧ;
Uдд - сигнал, снимаемый с датчика давления;
Uос - сигнал обратной связи;
Uз - задаваемый сигнал, определяющий давление потребителя;
ε - сигнал рассогласования - разностный сигнал между задаваемым сигналом и сигналом, снимаемым с датчика давления;
kp=kПРλkН - коэффициент пропорциональности между напряжением, поступающим на ПЧ (величиной входного сигнала), и расходом насосной станции;
kдд - коэффициент передачи датчика давления (коэффициент пропорциональности между давлением рабочей жидкости и величиной электрического сигнала, снимаемого с датчика давления насосной станции);
ky=U3(max)/kдд Pnomp(max) - коэффициент усиления в цепи обратной связи (коэффициент усиления сигнала датчика давления насосной станции), где U3(max) - максимальное задаваемое напряжение, Рпотр(max) - максимальное давление потребителя);
k0=(kpkддkyТ)-1 - коэффициент усиления в прямой цепи контура обратной связи (постоянный коэффициент усиления блока адаптации), где
kпер.1=1/2Рпотр - первый переменный коэффициент усиления, обратно пропорциональный удвоенной величине стабилизированного давления потребителя;
Кпер.2≈Qн - второй переменный коэффициент, прямо пропорциональный задаваемому расходу;
S - оператор Лапласа.
Насосная станция, в которой осуществлен предлагаемый способ управления выходным давлением рабочей жидкости и стабилизация этого давления, работает следующим образом.
Заданный входной сигнал U3 подают на сумматор 1, разностный сигнал ((U3-Uoc)=ε ), с которого поступает на первый вход блока 2 адаптации, где этот сигнал усиливают в k0 раз на операционном усилителе 10 и инвертируют. Сигнал Uвых.10 одновременно подают на два канала: в первом канале этот сигнал усиливают в kсж раз операционным усилителем 13 и инвертируют, получая соответственно сигнал Uвых13, который затем подают на операционный усилитель 14; во втором канале сигнал Uвых.10 поступает на операционный усилитель 11, где его усиливают с переменным коэффициентом Knep.1 усиления, который формируют путем подачи сигнала U3 на второй вход блока 2 адаптации, соединенного со вторым входом блока 17 умножения, первым входом через резистор 23 включенного в обратную связь операционного усилителя 11. При этом в узловой точке на входе в усилитель 11 ток приблизительно равен нулю.
Далее сигнал усиленный Kпер.1 поступает на первый вход блока 18 умножения, на второй вход которого подают преобразованный в соответствии со схемным решением (фиг.2) сигнал выхода блока 2 адаптации, который пропорционален величине расхода рабочей жидкости Qн насосной станции.
Сформированный в блоке 2 адаптации сигнал поступает на вход ПИД -регулятора 3, где реализовано интегро-дифференцирующее звено вида:
 что обеспечивает введение в контур обратной связи по давлению коррекции с передаточной функцией:
что обеспечивает введение в контур обратной связи по давлению коррекции с передаточной функцией:
 где Т0 - переменная величина, равная постоянной времени гидросистемы, которая изменяется обратно пропорционально расходу насоса и прямо пропорционально изменению давления потребителя, причем постоянная времени гидросистемы равна
где Т0 - переменная величина, равная постоянной времени гидросистемы, которая изменяется обратно пропорционально расходу насоса и прямо пропорционально изменению давления потребителя, причем постоянная времени гидросистемы равна  что справедливо в области частот
что справедливо в области частот  где С=1000м/с - скорость звука в рабочей жидкости, l - длина трубопровода гидросистемы в метрах.
где С=1000м/с - скорость звука в рабочей жидкости, l - длина трубопровода гидросистемы в метрах.
Если Tмех/Tэл>1, T1=Tмех или T1=Tэл, если Tэл>Tмех.T2=0,2T1.
k=kг - коэффициент усиления этого корректирующего звена - переменная величина, которая изменяется в зависимости от подаваемого насосом расхода и давления потребителя таким образом, что произведение коэффициентов усиления всех звеньев контура обратной связи по давлению (добротность) остается постоянным: k0kpkддky=const.
Таким образом, при перемножении передаточных функций блока адаптации Wбл.2адапт(S) и гидросистемы потребителя WГСП.(S) с переменными параметрами получают эквивалентную передаточную функцию Wбл.2aдaпт(S). Wгcп.(S)≅ k0/S, где
k0 - постоянный коэффициент, который выбирают из условия:  Отсюда видно, что введение блока 2 адаптации совместно с ПИД - регулятором 3 эквивалентно введению пропорционального интегро-дифференцирующего звена 2-го порядка, что позволяет скомпенсировать постоянную времени гидросистемы и наибольшую постоянную времени электродвигателя (Тмех или Tэл), сделать добротность постоянной вне зависимости от расхода насоса и давления потребителя, ввести интеграл с частотой среза -
Отсюда видно, что введение блока 2 адаптации совместно с ПИД - регулятором 3 эквивалентно введению пропорционального интегро-дифференцирующего звена 2-го порядка, что позволяет скомпенсировать постоянную времени гидросистемы и наибольшую постоянную времени электродвигателя (Тмех или Tэл), сделать добротность постоянной вне зависимости от расхода насоса и давления потребителя, ввести интеграл с частотой среза - 
В результате следящая система насосной станции будет обладать астатизмом первого порядка, т.е. будет инвариантна по отношению к потребляемому расходу и автоматически перестраиваемому в процессе работы стабилизированному давлению (см., например, Б.В.Новоселов. Проектирование квазиоптимальных следящих систем комбинированного регулирования. М.: Энергия, 1972, стр.76) за счет ступенчато изменяемого задаваемого напряжения Uз.
При заданном входном сигнале Uз=kykддPпomp (соответствующем задаваемому давлению потребителя) изменение kг вызовет изменение Pnomp, что приведет к появлению сигнала на ПИД - регуляторе 3, поступающего на преобразователь частоты (ПЧ) 4, который за счет изменения своей выходной частоты и напряжения в соответствии с законом управления U/f=const (так как требуется, чтобы давление потребителя Pnomp было постоянным в установившемся режиме) (см., например, “Каталог продукции и применений - 99” фирмы Triol, часть 1, стр.97) изменит скорость вращения электродвигателя и, соответственно, расход насоса, который будет изменяться до тех пор, пока не восстановится заданное давление. Таким образом, изменение величины Uз вызовет соответствующие изменения Pпотр.
Изменяя величину входного сигнал Uз и расход Qн насосной станции, можно “отработать” любую точку области, ограниченной функцией Qн=f(Рпотр) (фиг.5).
Компенсация kг и Тг позволяет стабилизировать коэффициенты передаточной функции контура обратной связи, устранить (минимизировать) влияние гидросистемы потребителя расхода, обеспечить высокую динамическую точность стабилизации давления на входе в гидросистему потребителя (т.е. с высокой скоростью восстанавливать меняющееся в переходных процессах давление), особенно при потреблении очень малых расходов (что другие насосные станции делать не могут), и тем самым повысить кратность регулирования Qmax.потр/Qmin.потр (здесь Qmax.потр, Qmin.потр - наибольшие и наименьшие расходы потребителя соответственно).
Компенсация Тмех или Тэл повышает скорость изменения потребляемого расхода в переходных процессах.
Оптимальный выбор k0 позволяет получить наибольшую скорость восстановления давления в переходных процессах изменения потребляемого расхода (и при этом система будет устойчива, т.е. не будет колебаний при установлении давления).
Введение связи задающего сигнала с блоком адаптации позволяет компенсировать kг даже при изменении величины стабилизированного давления.
Следует отметить, что подобная структурная схема возможна лишь при слабой зависимости скорости электродвигателя от момента нагрузки на его валу или при большой нагрузке, пропорциональной скорости электродвигателя.
Насосная станция по предлагаемому способу требует независимого охлаждения электродвигателя насоса, особенно при его малых оборотах и максимальных давлениях потребителя, а также охлаждения рабочей жидкости при максимальных расходах и давлениях потребителя.
С этой целью с помощью установленного над задним торцом приводного электродвигателя 5 вентилятора 36 с независимым электропитанием (на фиг. не показано) по направляющему кожуху (на фиг.не обозначено) и боковой поверхности электродвигателя 5 подают поток воздуха на крышку 38 бака и теплоотводящие элементы 37 в виде ребристых панелей, например, из алюминия, с помощью которых обеспечивают интенсивный отвод тепла рабочей жидкости (теплопроводность алюминия примерно в 104 больше теплопроводности воздушной прослойки между верхним уровнем рабочей жидкости и крышкой 38 бака).
Суммарную площадь поверхности ребристых панелей (S [м2]) определяют формулой

где:
Δ N [кВт] - величина рассеиваемой тепловой мощности;
Δ t [C° ] - превышение температуры рабочей жидкости над температурой окружающей среды;
V [м/с] - скорость потока воздуха, создаваемого вентилятором;
 - эмпирический коэффициент, определяемый конструкцией бака (χ =90-200).
- эмпирический коэффициент, определяемый конструкцией бака (χ =90-200).
Данное конструктивное выполнение насосной станции позволяет использовать вентилятор 36 для охлаждения не только электродвигателя 5, но и рабочей жидкости насосной станции.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ПОДДЕРЖАНИЯ ТРЕБУЕМЫХ ЗНАЧЕНИЙ ГИДРАВЛИЧЕСКОГО ДАВЛЕНИЯ ПРИ ОДНОВРЕМЕННОМ ИСПЫТАНИИ ДВУХ ПАРНЫХ ГИДРОАППАРАТОВ | 2024 |
|
RU2832730C1 |
| УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ НАСОСНОЙ СТАНЦИЕЙ | 2020 |
|
RU2743741C1 |
| Регулятор давления для насосной станции магистрального трубопровода | 1985 |
|
SU1256002A2 |
| Регулятор режимов работы насосной станции | 1987 |
|
SU1493984A2 |
| Способ управления насосной станцией | 1989 |
|
SU1751422A1 |
| Регулятор режима работы насосной станции | 1977 |
|
SU781389A1 |
| Регулятор давления для насосной станции магистрального трубопровода | 1979 |
|
SU773585A1 |
| Регулятор режимов работы насосной станции | 1985 |
|
SU1309000A1 |
| Насосная станция с программно-аппаратным обеспечением для создания точных управляемых давлений | 2022 |
|
RU2802559C1 |
| НАСОСНАЯ СТАНЦИЯ | 2001 |
|
RU2221166C2 |
Изобретение относится к гидравлическим источникам питания. В способе полученный разностный сигнал вначале усиливают с коэффициентом усиления k0, затем одновременно пропускают по двум каналам, а потом суммируют сигналы, прошедшие по этим каналам. В первом канале сигнал усиливают с коэффициентом усиления, соответствующим коэффициенту сжимаемости рабочей жидкости, а во втором канале сигнал вначале усиливают с первым переменным коэффициентом усиления kпер1, затем умножают на второй переменный коэффициент усиления kпер2, а потом интегрируют. Суммарный сигнал одновременно подают в качестве сигнала управления расходом рабочей жидкости и во второй канал в качестве второго переменного коэффициента усиления. Повышается точность и устойчивость системы регулирования, а также увеличивается диапазон регулирования расхода, повышается надежность и ресурс насосной станции, уменьшается нагрев рабочей жидкости. 2 с. и 3 з.п. ф-лы, 5 ил.
| КАЛАЧЕВ Ю.Н | |||
| и др | |||
| Способ закалки пил | 1915 |
|
SU140A1 |
| Новости приводной техники | |||
| Очаг для массовой варки пищи, выпечки хлеба и кипячения воды | 1921 |
|
SU4A1 |
| ШМИТТ А | |||
| Учебный курс гидравлики | |||
| Пособие по гидравлике | |||
| Маннесманн Рексрот ГмбХ | |||
| RSU 00 301/5.80, 1980, с.186, рис.4 | |||
| СПОСОБ СТАБИЛИЗАЦИИ ВЫХОДНЫХ ПАРАМЕТРОВ ГИДРОПОРШНЕВОЙ НАСОСНОЙ УСТАНОВКИ | 1995 |
|
RU2100647C1 |
| Насосный агрегат | 1961 |
|
SU142532A1 |
| Способ общего обезболивания | 1987 |
|
SU1498496A1 |
| DE 3824293 А1, 25.01.1990 | |||
| DE 3137001 A1, 24.03.1983. | |||

