Настоящее изобретение относится к способу и устройству идентификации объекта, покрытого прозрачным слоем по меньшей мере на некоторых его участках, посредством определения свойства поверхности.
Поверхности объектов, которые в принципе одинаковы, могут отличаться друг от друга при достаточно скрупулезном изучении. Это отчасти справедливо уже для макроскопического диапазона, но в любом случае для микроскопического диапазона. Поэтому в конечном итоге не существует двух полностью идентичных объектов.
В связи с этим для идентификации объектов, в частности для изучения их происхождения или аутентичности, известен способ определения параметров свойства участка поверхности объекта и их преобразования в одно или несколько характерных цифровых значений, т.е. свойства естественной поверхности сканируют и определяют, чтобы получить на их основе измеренные значения, которые, в свою очередь, соответствуют цифровым значениям, характерным для упомянутой поверхности.
Однако определение свойства поверхности представляет собой трудную задачу, к примеру, при отличающихся условиях освещения при первичном определении параметров и последующей процедуре изучения, так как, к примеру, свет, падающий на поверхность, создает отражения на поверхности объекта, которые зависят от условий освещения. Кроме того, к примеру, расположение объекта во время первичной регистрации параметров свойства и при последующем изучении могут отличаться, в результате чего возникают отличающиеся отражения, в каждом случае влияющие на определяемые данные.
Вследствие этого определяемые параметры свойства часто не соответствуют поверхности самого объекта, но сильно зависят от различных окружающих поверхностей. В результате сравнение исходного набора данных и набора данных, получаемых для изучения, может приводить к неправильной идентификации.
Поэтому в основу изобретения была положена задача предложить способ и устройство, с помощью которых можно было бы просто и надежно определять параметры свойства поверхности объекта.
Указанная задача решается в изобретении с помощью способа с отличительными признаками, приведенными в пункте 1 формулы изобретения, и устройства с отличительными признаками, приведенными в пункте 8 формулы изобретения. Предпочтительные дополнительные варианты осуществления изобретения описаны в зависимых пунктах формулы изобретения.
Основной идеей изобретения было решение имеющейся до настоящего времени проблемы невозможности использования предшествующих способов идентификации поверхностей для идентификации поверхностей, покрытых прозрачным слоем, таким, к примеру, как целлофановая пленка, т.к. отражения света от прозрачной пленки затрудняют правильное определение параметров свойства, если не делают это вообще невозможным.
Предлагаемый в изобретении способ идентификации объекта, покрытого прозрачным слоем по меньшей мере на некоторых его участках, посредством определения свойства поверхности реализован с помощью оптической системы, которая обнаруживает по меньшей мере две плоскости поляризации света, отраженного от поверхности объекта и от поверхности прозрачной пленки, и с учетом выявленных плоскостей поляризации определяет свойство поверхности с целью идентификации объекта.
Вследствие различия плоскостей поляризации можно отфильтровать одну плоскость поляризации, в которой обнаруженное изображение содержит большее количество помех, таких как отражения света, которые должны быть отфильтрованы при определении параметров свойства, т.е. параметры свойства определяют в каждой возможной плоскости поляризации оптической системы насколько это возможно в виде изображения и обрабатывают оптической системой, к примеру, преобразуют в набор данных и сохраняют. Во время определения, обработки или преобразования оптическая система совершенно не учитывает плоскости поляризации, в которых наблюдаются отражения света, или оптическую систему конфигурируют таким образом, чтобы она не учитывала при подготовке параметров свойства области в плоскостях поляризации, в которых обнаружены нежелательные отражения света. Следует отметить, что в связи с настоящим изобретением выражение "свойства поверхности" должно пониматься как означающее весь профиль отражения поверхности, который включает в себя как изначально присущие (естественные) свойства, структуры, свойства материалов и шероховатость, так и искусственно привнесенные свойства, приобретенные вследствие нанесения или добавления идентификационных меток, конгревного тиснения, текстуры, цвета и т.д.
Вследствие этого оптическая система определяет параметры свойства поверхности объекта в значительной мере без мешающих отражений света, в частности без отражений от поверхности прозрачного слоя.
Поэтому предлагаемый в изобретении способ позволяет обнаруживать и определять исключительно свойства поверхности объекта, в частности, без учета влияния находящегося на нем прозрачного слоя, так что также возможно, к примеру, при последующем изучении параметров свойства, когда объект более не покрыт прозрачным слоем, сравнивать вновь полученные параметры свойства с исходными параметрами свойства.
Оптическая система может содержать несколько устройств съемки изображений, к примеру несколько датчиков изображений, в каждом случае с поляризационным фильтром, причем плоскости поляризации фильтров смещены относительно друг друга. Также возможно, к примеру, оснащение устройства съемки изображений поляризационным фильтром, выполненным с возможностью вращения, который для получения данных поворачивают в различные положения. В таком случае, однако, обнаружение данных должно выполняться по меньшей мере в двух положениях поляризационного фильтра.
В еще одном варианте осуществления изобретения оптическая система содержит датчик поляризации, т.е. датчик изображений содержит несколько поляризационных фильтров и одновременно обнаруживает по меньшей мере две или более плоскости поляризации.
Такие датчики поляризации известны, к примеру, из документа DE 102008014334 A1 или DE 202012010997 U1. В силу вышесказанного, использование такого поляризационного фильтра позволяет, в частности, быстро определять параметры свойства в нескольких плоскостях поляризации. В результате этого удается, в частности, в случае промышленного использования согласовывать скорость прохождении объектов через оптическую систему со скоростью прохождения объектов через промышленное устройство.
Определяемые оптической системой свойства поверхности предпочтительнее являются естественными свойствами поверхности, такими как параметры текстуры, шероховатость, цвет или даже поверхностное натяжение. В такой ситуации оптическая система может выполняться с возможностью определения одновременно как параметров отдельного свойства, так и параметров отличающихся свойств. "Отпечаток" участка поверхности, формируемый оптической системой, может, соответственно, также содержать несколько различных параметров, в результате чего точность идентификации объекта заметно возрастает.
Как уже упоминалось выше, могут определяться как естественные, так и искусственные свойства, т.е. в принципе для идентификации могут использоваться все оптически определяемые свойства, так что свойства поверхности могут также включать в себя свойства, которые привнесены на или в объект. Последние включают в себя, к примеру, наносимые на поверхность идентификационные метки, такие как конгревное тиснение или наносимая на поверхность идентификационная маркировка, такая как символы, рукописный шрифт, цветные метки, коды, в частности точечные коды, штрихкоды, матричные коды и/или другие искусственные структуры, предназначенные для идентификации, но которые, располагаясь под прозрачной пленкой, не могут быть адекватно определены. Это может также относиться, к примеру, к свойствам поверхности, которые при нормальном освещении нечетко или недостаточно ясно видны для человеческого глаза, но которые видны, к примеру, при поляризации отраженного света.
Под термином "прозрачный слой" понимаются все слои, покрывающие поверхность или участок поверхности объекта, которые являются прозрачными, т.е. через которые можно видеть поверхность. Это, к примеру, может быть прозрачный слой, выполненный в виде покрытия. Такое покрытие может соединяться с поверхностью постоянно или с возможностью отделения. Это может быть, к примеру, глянцевая упаковочная бумага или лаковое покрытие, к примеру, на деталях машин.
Однако в еще одном варианте осуществления изобретения прозрачный слой выполняют в виде пленки. В таком случае пленка покрывает по меньшей мере часть объекта, который подлежит идентификации. Однако пленка может покрывать весь объект полностью. Типичными являются прозрачные пленки, которые по меньшей мере частично охватывают сам объект или окружающую его упаковку и, к примеру, защищают объект от внешних воздействий. Такие пленки, к примеру, включают в себя целлофановые пленки, термоусадочные пленки или прозрачные транспортировочные пленки.
Прозрачный слой в принципе может быть цветным, причем должно быть гарантировано, что слой обладает по меньшей мере минимальной прозрачностью. Поэтому через него в любом случае должно быть как минимум видно, так что оптическая система может определить поверхность, находящуюся под слоем. Предпочтительнее, однако, чтобы прозрачный слой был бесцветным, т.к. определение свойств поверхности через бесцветный прозрачный слой особенно просто.
Способ может в принципе использоваться с любым объектом, у которого участок поверхности, предназначенный для идентификации, покрыт прозрачным слоем. Соответственно, к примеру, машины, детали машин, потребительские товары, продукты питания, лекарственные препараты или упаковка лекарственных средств и т.п., которые покрыты прозрачным слоем по меньшей мере на некоторых участках, могут быть идентифицированы с помощью предлагаемого в изобретении способа. Предпочтительнее, однако, идентифицировать с помощью предлагаемого в изобретении способа объекты, поверхность которых состоит из бумаги и/или пластмассы, в частности бумажной и/или пластмассовой упаковки.
Из-за большого количества фальсификатов продуктов имеется настоятельная необходимость в идентификации, к примеру, сигарет. Как пачки сигарет, так и окружающую блоки сигарет упаковку оборачивают в целлофановую пленку, чтобы обеспечить защиту от влаги и грязи. Пленка может присутствовать на лицевых сторонах, на некоторых участках даже в виде двойного слоя, так что определение параметров свойства участка поверхности, расположенного под двойным слоем пленки, невозможно.
С помощью предлагаемого в изобретении способа можно, к примеру, перед упаковкой пачек сигарет в блоки надежно и без влияния мешающих отражений определить и сохранить в центральной базе данных свойства участка поверхности окружающей упаковки, в которую обернута индивидуальная пачка сигарет. В таком случае, к примеру, могут быть определены естественные или искусственные свойства поверхности даже участков поверхности, находящихся под двойным слоем прозрачной пленки. Официальные органы могут, к примеру, провести повторную идентификацию свойств поверхности окружающей упаковки сигарет, которые были ранее однозначно идентифицированы, сравнить полученные данные с данными, хранящимися в базе данных, и таким образом определить, является ли продукт на самом деле фальсификатом, или, в случае необходимости, могут проследить первоначальную цепь поставки блоков сигарет.
Для того чтобы в дальнейшем можно было в любое время вызвать первоначально определенные оптической системой параметры свойства для идентификации объекта, определенные параметры, представленные, в частности, цифровыми значениями, предпочтительно обрабатываются оптической системой и сохраняются. Упомянутые цифровые величины являются уникальными для рассматриваемой поверхности конкретного объекта и в то же время представляют собой отпечаток поверхности, который, соответственно, однозначно ее характеризует. В таком случае для надежной идентификации, в зависимости от определяемого параметра, должна быть высокая степень совпадения между исходными данными и данными, полученными в ходе проверки.
Вследствие этого оптическая система, в частности, содержит устройство обработки данных, такое, к примеру, как микропроцессор, и, если необходимо, то запоминающее устройство или устройство связи, к примеру, для беспроводного соединения с запоминающим устройством. В качестве альтернативы или дополнения наборы данных могут располагаться на самом объекте, к примеру, в виде матричного кода или штрих- кода.
В целях ограничения затрачиваемых на определение усилий, в частности ограничения количества определяемых данных, в большинстве случаев обследуется только определенный участок площади поверхности. Количество параметров поверхности, определяемых в пределах предлагаемого в изобретении участка, в частности, оптимально для гарантирования надежной идентификации и сводит к минимуму усилия, в частности, по определению, обработке и хранению параметров свойства.
Настоящее изобретение, кроме того, решает упомянутую выше задачу с помощью устройства идентификации объекта, причем объект
- покрыт по меньшей мере на некоторых участках прозрачным слоем, и
- расположен своим покрытым участком поверхности в пределах дальности обнаружения оптической системы,
- оптическая система выполнена таким образом, чтобы обнаруживать по меньшей мере две плоскости поляризации света, отраженного от поверхности объекта и от поверхности прозрачного слоя, и
- определять свойства поверхности объекта с целью его идентификации, принимая во внимание обнаруженные плоскости поляризации.
Предлагаемое в изобретении устройство выполнено таким образом, чтобы обнаруживать различные плоскости поляризации отраженного света и отфильтровывать плоскость, в которой наблюдается наибольшее количество отражений света. Это может происходить, к примеру, таким образом, что целые плоскости поляризации или отдельные участки обнаруженных плоскостей поляризации, в которых оптическая система выявляет наличие отражений света, не учитываются при регистрации или обработке и подготовке набора данных.
Идентифицируемым объектом, в принципе, может быть любой объект, у которого идентифицируемый участок поверхности покрыт прозрачным слоем. Соответственно, возможна, к примеру, установка предлагаемого в изобретении устройства в различных устройствах на постоянной основе или выполнение устройства в виде мобильного блока. Нет необходимости иметь непосредственный контакт между оптической системой и объектом.
Предлагаемое в изобретении устройство также позволяет при различном положении объекта до входа в зону обнаружения оптической системы или даже при различных условиях освещения при определении параметров свойств все еще надежно определять параметры свойства, так что упомянутое устройство подходит, в частности, для мобильного использования.
Несмотря на то что ряд аспектов изобретения был описан в связи со способом, понятно, что эти аспекты также относятся к описанию соответствующего устройства. По аналогии с этим аспекты, описанные в связи с устройством, следует также понимать как описание соответствующих этапов способа или как отличительный признак этапа способа.
Настоящее изобретение более подробно описано на примере одного из вариантов осуществления изобретения.
На прилагаемых к описанию чертежах показано:
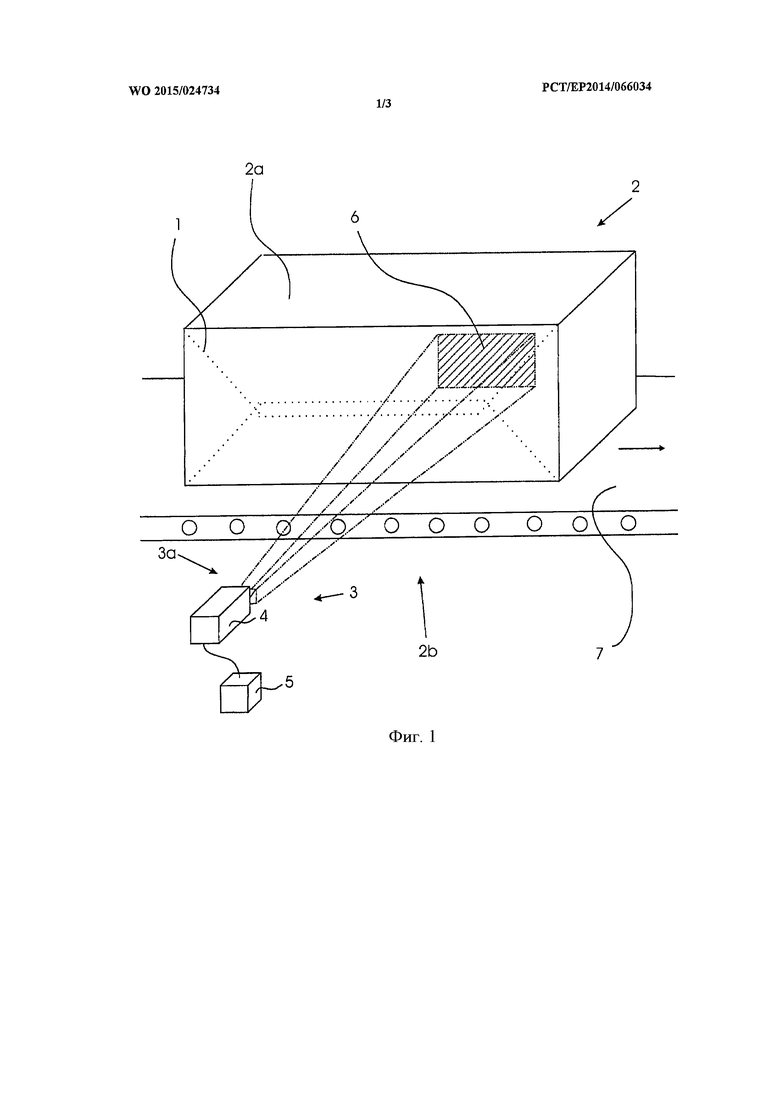
Фиг. 1 - схематичное перспективное представление оптической системы и объекта, транспортируемого на ленте конвейера;
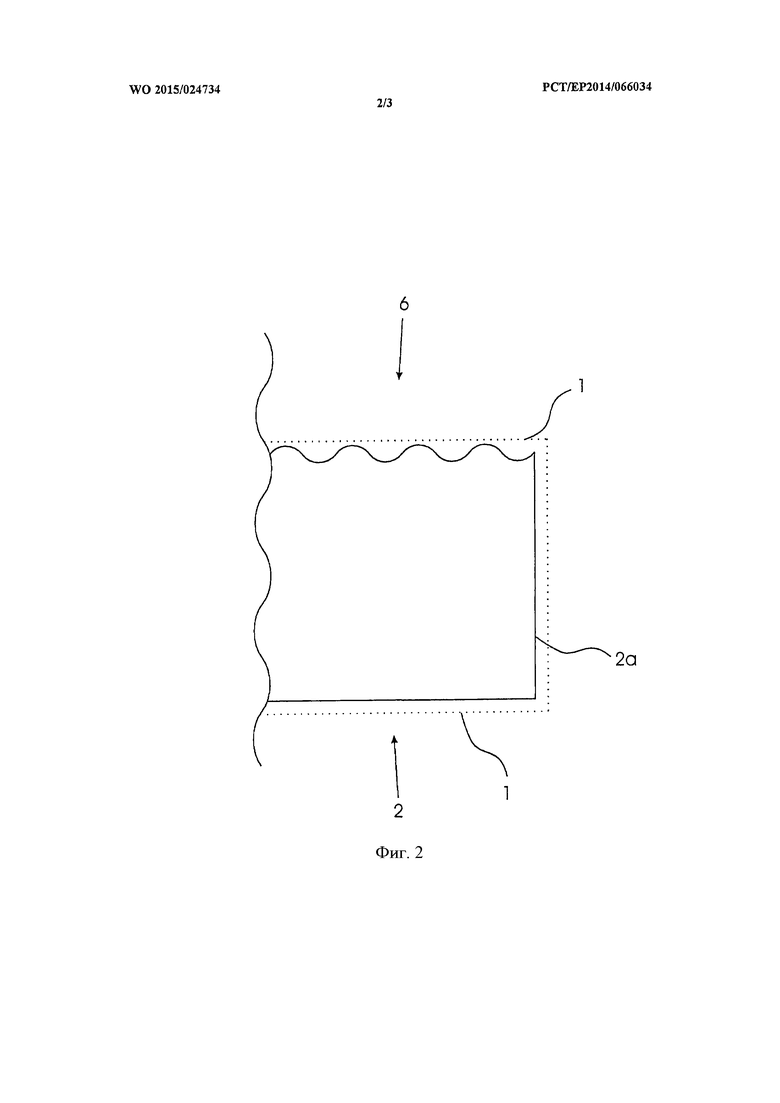
Фиг. 2 - схематичное увеличенное сечение поверхности идентифицируемого участка объекта, показанного на Фиг. 2;
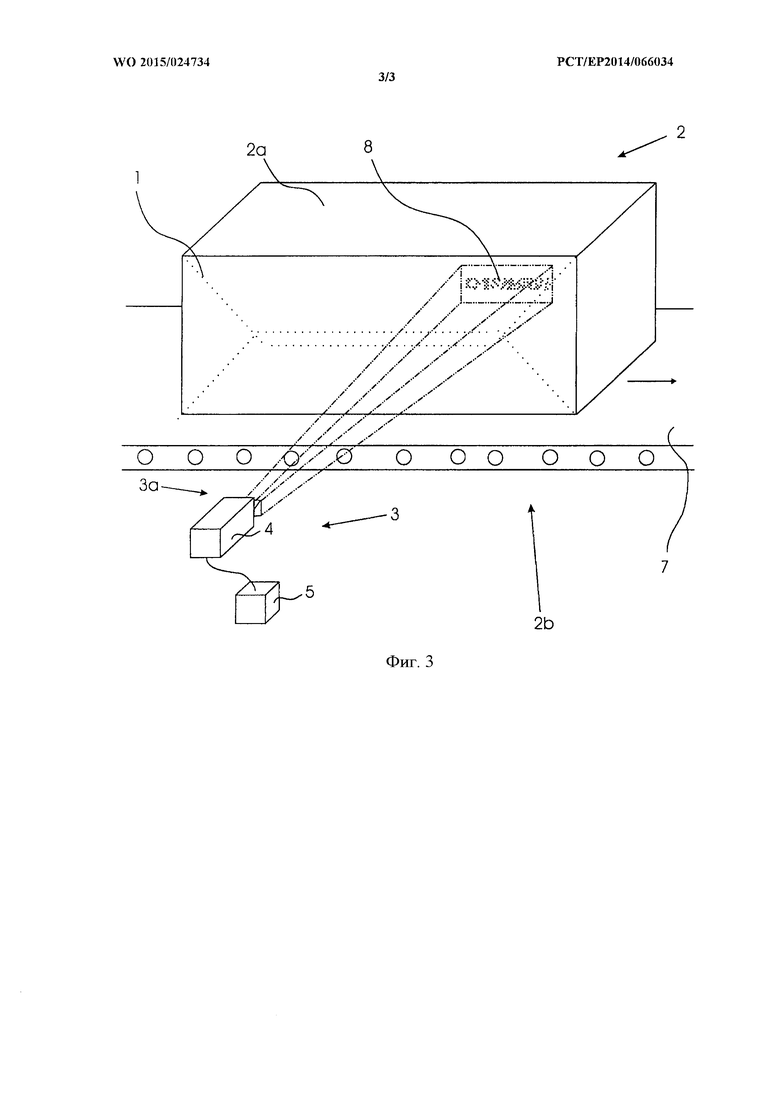
Фиг. 3 - схематичное перспективное представление оптической системы, показанной на Фиг. 1, и объекта с точечным кодом.
На Фиг. 1 схематично показан блок 2 сигарет с внешней упаковкой 2а, которая со всех сторон покрыта прозрачным слоем 1 (обозначен прерывистой линией) в виде целлофановой пленки. Упомянутый блок 2 сигарет транспортируется лентой 7 конвейера к упаковочному агрегату (не показан). В данном случае блок 2 сигарет расположен на транспортировочном устройстве таким образом, что он обращен лицевой стороной 2b к объективу 3а оптической системы 3.
Оптическая система 3 содержит поляризационную камеру 4, предназначенную для получения изображений с высоким разрежением. Упомянутая поляризационная камера соединена с устройством 5 обработки и хранения данных. Поляризационная камера 4 имеет датчик поляризации (не показан), т.е. датчик изображения с поляризационными фильтрами, который одновременно обнаруживает четыре отличающихся плоскости поляризации света.
В связи с этим упомянутая поляризационная камера 4 выполнена таким образом, чтобы определять структуру поверхности, в данном случае конкретные параметры шероховатости поверхности, и с помощью устройства 5 обработки и хранения данных, относящегося к оптической системе 3, формировать из определенных параметров свойства профиль отражения сканируемой поверхности и преобразовывать его в значения данных. В качестве альтернативы также можно, к примеру, регистрировать маркировку, наносимую на объект, такую как точечный код, штрихкод или матричный код или идентификационные отметки, такие как символы, выполненные на поверхности объекта конгревным тиснением.
В процессе эксплуатации поляризационную камеру устанавливают относительно транспортерной ленты таким образом, что она обнаруживает идентификационный участок 6, находящийся под прозрачным слоем 1 (представлен заштрихованной поверхностью) в правом верхнем углу блока 2 сигарет.
Блок сигарет транспортируется лентой 7 конвейера через зону обнаружения (обозначена пунктирной линией) поляризационной камеры 4. В таком случае поляризационная камера 4 сканирует идентификационный участок 6, т.е. обнаруживает свет, отраженный от поверхности целлофановой пленки и поверхности 2а внешней упаковки блока 2 сигарет в четырех плоскостях поляризации и передает информацию в устройство 5 обработки данных. В таком случае из-за сгибания целлофановой пленки идентификационный участок 6, находящийся на лицевой стороне 2b блока 2 сигарет, в каждом случае участок за участком оказывается под двумя или одним слоем целлофановой пленки соответственно, в результате чего возникает множество отличающихся отражений.
Поляризационная камера 4 определяет параметры свойства поверхности в двух или нескольких плоскостях, отфильтровывает зоны идентификационного участка 6, в которых отражения света мешают определению параметров поверхности внешней упаковки 2а, на основе отфильтрованных параметров свойства четырех плоскостей поляризации формирует профиль отражения обнаруженного участка поверхности внешней упаковки и исходя из свойств двух или более плоскостей поляризации вычисляет профиль отражения обнаруженного участка поверхности внешней упаковки.
Упомянутый профиль отражения преобразуется устройством 5 обработки данных в набор данных и сохраняется в устройстве 5 хранения данных, так что он может быть легко вызван для последующего сравнения с вновь полученными параметрами свойства.
На Фиг. 2 схематично показано сечение идентификационного участка 6 блока 2 сигарет. Упомянутый блок 2 сигарет имеет внешнюю упаковку 2а, которая содержит несколько не показанных на чертеже отдельных пачек сигарет. Внешняя упаковка 2а выполнена из бумаги. Упомянутая бумага обладает индивидуальными свойствами поверхности, в данном случае шероховатостью поверхности (схематично представлена волнистой линией), которая может быть обнаружена поляризационной камерой 4 с высоким разрешением оптической системы 3. В качестве альтернативы может также обнаруживаться нанесенная маркировка, такая, к примеру, как код.
Поверх распознаваемого участка поверхности (идентификационного участка 6) внешняя упаковка 2а закрыта бесцветной прозрачной целлофановой пленкой.
Когда свет падает на блок 2 сигарет, он отражается как от поверхности целлофановой пленки, так и от поверхности бумаги (внешней упаковки 2а) в различных плоскостях поляризации. В этом случае происходят отражения, в частности, от поверхности целлофановой пленки, которые мешают точному определению структуры поверхности внешней упаковки 2а (бумаги).
В результате обнаружения света, отраженного от идентификационного участка 6, в различных плоскостях поляризации, в процессе обработки выявленных параметров свойства оптическая система 3 способна отфильтровать мешающие отражения света или, соответственно, исключить их из рассмотрения при формировании набора данных определенных параметров поверхности.
На Фиг. 3 показана оптическая система 3 и лента 7 конвейера, показанные на Фиг. 1. На ленте 7 конвейера мимо оптической системы 3 перемещается блок 2 сигарет с точечным кодом 8, напечатанным на внешней упаковке 2а блока 2 сигарет. Упомянутый точечный код, соответствующий идентификационному участку 6, закрыт целлофановой пленкой (прозрачным слоем 1), и из-за сгибания целлофановой пленки на разных участках он закрыт ее одним или двумя слоями. Определение точечного кода 8 оптической системой 3 происходит согласно вышеприведенному описанию для Фиг. 1 и 2.
В качестве альтернативы точечному коду 8 на поверхность могут также наноситься и считываться оптической системой 3 любые идентификационные метки, к примеру рукописные символы, цветные метки, штрихкоды или матричные коды.
| название | год | авторы | номер документа |
|---|---|---|---|
| СРЕДСТВО ЗАПИСИ КОНФИДЕНЦИАЛЬНОЙ ИНФОРМАЦИИ | 2006 |
|
RU2417440C2 |
| СПОСОБ СОРТИРОВКИ ОТХОДОВ | 2016 |
|
RU2705477C2 |
| СПОСОБ И УСТРОЙСТВО ДЛЯ ОТСЛЕЖИВАНИЯ ДЕФЕКТОВ ПОЛОСОВЫХ МАТЕРИАЛОВ | 2014 |
|
RU2631895C2 |
| ОПТИЧЕСКАЯ СИСТЕМА ДЛЯ БИОМЕТРИЧЕСКОЙ ИДЕНТИФИКАЦИИ ПОЛЬЗОВАТЕЛЯ | 2016 |
|
RU2627926C1 |
| СПОСОБ ОПТИЧЕСКОЙ МАРКИРОВКИ ИЗДЕЛИЙ | 2005 |
|
RU2311677C2 |
| СПОСОБ АУТЕНТИФИКАЦИИ ПОЛИМЕРНОЙ ПЛЕНКИ | 2009 |
|
RU2479827C2 |
| СПОСОБ АУТЕНТИФИКАЦИИ ПОЛИМЕРНОЙ ПЛЕНКИ | 2012 |
|
RU2535234C2 |
| ЭЛЕМЕНТ ЗАЩИТЫ И СПОСОБ ЕГО ИЗГОТОВЛЕНИЯ | 2005 |
|
RU2377132C2 |
| Защитное устройство на основе дифракционных структур нулевого порядка | 2022 |
|
RU2801793C1 |
| СПОСОБ ОПТИЧЕСКОЙ МАРКИРОВКИ ИЗДЕЛИЯ | 2014 |
|
RU2568821C1 |
Изобретение относится к области оптических измерений и касается способа и устройства идентификации покрытого прозрачным слоем объекта. Идентификация объекта осуществляется посредством определения свойства поверхности с помощью оптической системы, которая содержит поляризационную камеру, выполненную с возможностью получения изображений с высоким разрешением и соединенную с устройством обработки и хранения данных. Поляризационная камера содержит датчик поляризации, с помощью которого обнаруживают две плоскости поляризации света, отраженного от поверхности объекта и от поверхности прозрачного слоя. Определение свойства поверхности для идентификации объекта осуществляют с учетом обнаруженных плоскостей поляризации. Технический результат заключается в повышении точности идентификации. 2 н. и 16 з.п. ф-лы. 3 ил.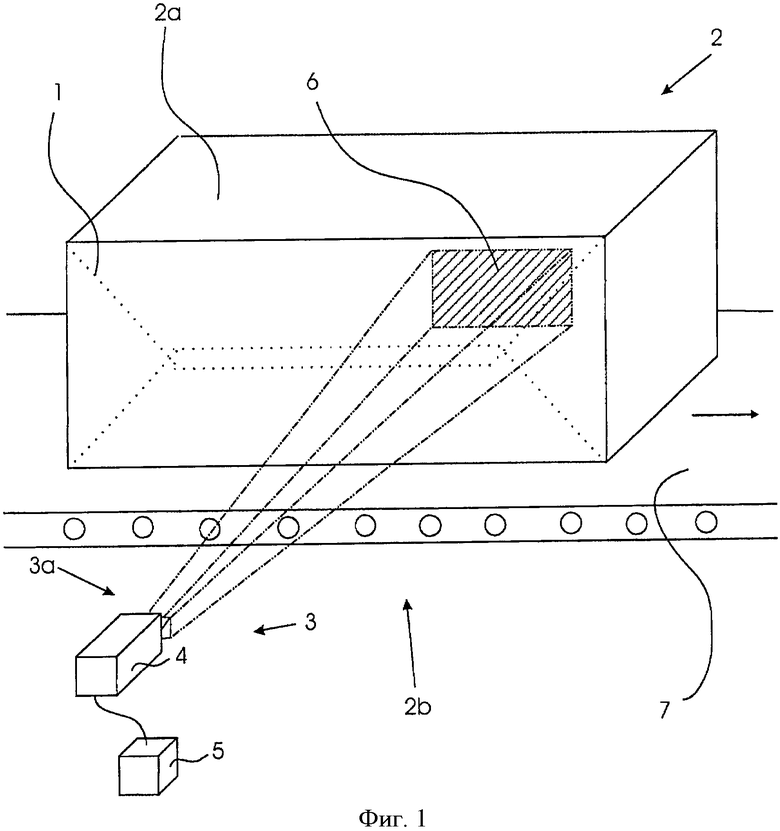
1. Способ идентификации объекта, покрытого прозрачным слоем (1) по меньшей мере на некоторых участках, посредством определения свойства поверхности с помощью оптической системы (3), при этом оптическая система (3) содержит поляризационную камеру, выполненную с возможностью получения изображений с высоким разрешением и соединенную с устройством (5) обработки и хранения данных, а поляризационная камера содержит датчик поляризации, с помощью которого по меньшей мере
обнаруживают две плоскости поляризации света, отраженного от поверхности объекта и от поверхности прозрачного слоя (1), и
с учетом обнаруженных плоскостей поляризации определяют свойство поверхности для идентификации объекта.
2. Способ по п. 1, отличающийся тем, что оптическая система (3) содержит датчик изображений с поляризационным фильтром, который одновременно обнаруживает по меньшей мере две или более плоскостей поляризации.
3. Способ по п. 1 или 2, отличающийся тем, что в качестве свойства поверхности определяют ее текстуру, шероховатость, цвет и/или идентификационную маркировку на поверхности, в частности точечный код, матричный код или штрихкод.
4. Способ по п. 1 или 2, отличающийся тем, что прозрачный слой (1) выполнен в виде прозрачной пленки.
5. Способ по п. 3, отличающийся тем, что прозрачный слой (1) выполнен в виде прозрачной пленки.
6. Способ по любому из пп. 1, 2, 5, отличающийся тем, что поверхность объекта является бумажной и/или пластмассовой, в частности бумажной и/или пластмассовой упаковкой.
7. Способ по п. 3, отличающийся тем, что поверхность объекта является бумажной и/или пластмассовой, в частности бумажной и/или пластмассовой упаковкой.
8. Способ по п. 4, отличающийся тем, что поверхность объекта является бумажной и/или пластмассовой, в частности бумажной и/или пластмассовой упаковкой.
9. Способ по любому из пп. 1, 2, 5, 7, 8, отличающийся тем, что свойство поверхности обрабатывают, в частности переводят в цифровую форму и сохраняют в памяти.
10. Способ по п. 3, отличающийся тем, что свойство поверхности обрабатывают, в частности переводят в цифровую форму и сохраняют в памяти.
11. Способ по п. 4, отличающийся тем, что свойство поверхности обрабатывают, в частности переводят в цифровую форму и сохраняют в памяти.
12. Способ по п. 6, отличающийся тем, что свойство поверхности обрабатывают, в частности переводят в цифровую форму и сохраняют в памяти.
13. Способ по любому из пп. 1, 2, 5, 7, 8, 10-12, отличающийся тем, что для идентификации объекта свойство указанного определенного участка поверхности снова определяют и сравнивают с первоначально определенными и сохраненными данными о свойстве.
14. Способ по п. 3, отличающийся тем, что для идентификации объекта свойство указанного определенного участка поверхности снова определяют и сравнивают с первоначально определенными и сохраненными данными о свойстве.
15. Способ по п. 4, отличающийся тем, что для идентификации объекта свойство указанного определенного участка поверхности снова определяют и сравнивают с первоначально определенными и сохраненными данными о свойстве.
16. Способ по п. 6, отличающийся тем, что для идентификации объекта свойство указанного определенного участка поверхности снова определяют и сравнивают с первоначально определенными и сохраненными данными о свойстве.
17. Способ по п. 9, отличающийся тем, что для идентификации объекта свойство указанного определенного участка поверхности снова определяют и сравнивают с первоначально определенными и сохраненными данными о свойстве.
18. Устройство для идентификации объекта, который
по меньшей мере на некоторых участках покрыт прозрачным слоем (1) и
расположен таким образом, что покрытый участок находится в области обнаружения оптической системы (3),
оптическая система (3) выполнена с возможностью обнаружения по меньшей мере двух плоскостей поляризации света, отраженного от поверхности объекта и от поверхности прозрачного слоя (1), и определения свойства поверхности с учетом обнаруженных плоскостей поляризации для идентификации объекта, при этом
оптическая система (3) содержит поляризационную камеру, выполненную с возможностью получения изображений с высоким разрешением, и, в свою очередь, поляризационная камера соединена с устройством (5) обработки и хранения данных, причем поляризационная камера содержит датчик поляризации, выполненный с возможностью одновременно определять четыре различных плоскости поляризации света.
| US 2013123985 A1, 16.05.2013 | |||
| US 2012092484 A1, 19.04.2012 | |||
| WO 2006083944 A1, 10.08.2006 | |||
| УСТРОЙСТВО ДЛЯ ИДЕНТИФИКАЦИИ ОБЪЕКТА | 2004 |
|
RU2268495C1 |

