Это изобретение относится к медицинским диагностическим ультразвуковым системам и, в частности, к датчикам преобразователя с матричной решеткой (матричным датчикам), работающим с различными формирователями лучей ультразвуковой системы.
Ультразвуковые матричные преобразователи могут быть выполнены в виде одного ряда из элементов преобразователя, одномерной (1D) матрицы для отображения плоскости двумерного (2D) изображения или двумерной (2D) матрицы элемента преобразователя для отображения трехмерной области. 2D матрица содержит элементы, продолжающиеся и в направлении азимута, и в направлении высоты, которые могут работать полностью независимо с возможностью и фокусировать, и управлять лучами в любом направлении азимута или высоты. Эти матрицы могут быть выполнены либо в плоской, либо в изогнутой ориентациях. Настоящее изобретение направлено на 2D-матричные преобразователи, которые могут управлять и фокусировать и по азимуту, и по высоте с возможностью сканировать как плоскости 2D изображения, так и представляющие интерес трехмерные объемные области.
Двумерные матричные преобразователи и даже 1D матрица с большим количеством элементов представляют проблему из-за их большого количества элементов преобразователя. Так как необходимо отдельно управлять передачей и приемом каждого из этих элементов, для каждого элемента необходимо обеспечивать отдельную сигнальную линию. Одномерная матрица может содержать ряд из 100-200 элементов, требующих 100-200 сигнальных линий, которые могут быть размещены в относительно маленьком и легком кабеле датчика, но может возникать необходимость работать с формирователем лучей системы с относительно маленьким количеством каналов. 2D матрица может иметь 100-200 рядов элементов в одном измерении и 100-200 столбцов элементов в другом измерении, насчитывая тысячи отдельных элементов. Кабель со многими тысячами сигнальных линий является непрактичным для датчика, который является переносным и должен управляться специалистом по ультразвуковой эхографии. Вариант выполнения настоящего изобретения преодолевает эти проблемы путем использования интегральной схемы микроформирователя лучей, прикрепленной к 2D матрице, которая выполняет частичное формирование лучей групп элементов, называемых пэтчи. По отдельности задержанные и суммированные сигналы от элементов каждого пэтча проводятся по кабелю стандартного размера к формирователю лучей ультразвуковой системы, где суммированный сигнал от каждого пэтча подается к каналу формирователя лучей системы, который завершает операцию формирования лучей. Это разделение полной операции формирования лучей между микроформирователем лучей в датчике и каналами формирователя лучей системы, проиллюстрированное, например, в патенте США 5229933 (Larson, III), патенте США 5997479 (Savord et al.), патенте США 6013032 (Savord) и патенте США 6126602 (Savord et al.), обеспечивает использование кабеля с относительно маленьким количеством сигнальных линий между датчиком и ультразвуковой системой.
Ультразвуковой датчик в общем выполнен с заданной конфигурацией, которая работает с соответствующей конфигурацией формирователя лучей системы. Например, датчик с 64-элементной одномерной матрицей будет работать с 64-канальным формирователем лучей системы, а датчик с 128-элементной матрицей будет работать с 128-канальным формирователем лучей системы. Желательно иметь датчик с переменной конфигурацией, который способен работать с различными формирователями лучей системы. Одна попытка создания датчика с переменной 2D матрицей показана в патенте США 7517317 (Lazenby et al.) В этом патенте элементы 2D матрицы являются делимыми на блоки элементов, которые могут выборочно соединяться вместе переключателями так, что сигналы от множественных элементов объединяются на один выход. Чем большее количество элементов соединяется вместе на меньшем количестве выходов для меньшего количества каналов формирователя лучей, тем меньшее количество элементов соединяется вместе на большем количестве выходов для более высокого количества каналов формирователя лучей. Однако, шаг матрицы, который представляет собой расстояние от центра до центра смежных групп взаимосоединенных элементов, зависит от количества элементов, соединенных вместе. Когда шаг увеличивается, боковые лепестки луча увеличиваются, что увеличивает помехи и уменьшает ясность и разрешение получающегося в результате изображения. Степень, до которой можно управлять и фокусировать луч, также ограничивается. Соответственно, желательно быть способным конфигурировать 2D матрицу для работы с различными формирователями лучей системы без этих отрицательных эффектов.
В соответствии с принципами настоящего изобретения ультразвуковой матричный датчик преобразователя работает с микроформирователем лучей с возможностью обработки сигналов от переменных пэтчей элементов преобразователя, которые варьируются в соответствии с формирователем лучей системы, с которым датчик должен работать. Сигнал от каждого элемента выборочно задерживается, при этом сигналы от элементов, используемых в одном и том же пэтче, неодинаково задерживаются в отношении общего времени или опорной фазы для пэтча. Неодинаково задержанные сигналы объединяются для выдачи сигнала пэтча, сформированного микроформирователем лучей. Количество сигналов пэтча, сформированных таким образом, также выборочно регулируется с возможностью соответствовать количеству каналов формирователя лучей системы, используемого для завершения процесса формирования лучей. Вариант выполнения настоящего изобретения обеспечивает одинаковый матричный набор для использования с ее микроформирователем лучей с различными ультразвуковыми системами или с наиболее экономичным кабелем датчика для системы.
На чертежах:
Фигура 1 иллюстрирует в форме блок-схемы 2D матричный преобразователь и датчик с микроформирователем лучей настоящего изобретения.
Фигура 2 представляет собой блок-схему, иллюстрирующую концепцию микроформирователя лучей с частичным суммированием лучей.
Фигура 3 иллюстрирует матричный датчик с микроформирователем лучей и ультразвуковую систему, выполненную в соответствии с принципами настоящего изобретения.
Фигура 4 иллюстрирует матрицу перекрестных переключателей для соединения сформированных микроформирователем лучей пэтчей 2D матрицы различных размеров с каналами формирователя лучей системы в соответствии с принципами настоящего изобретения.
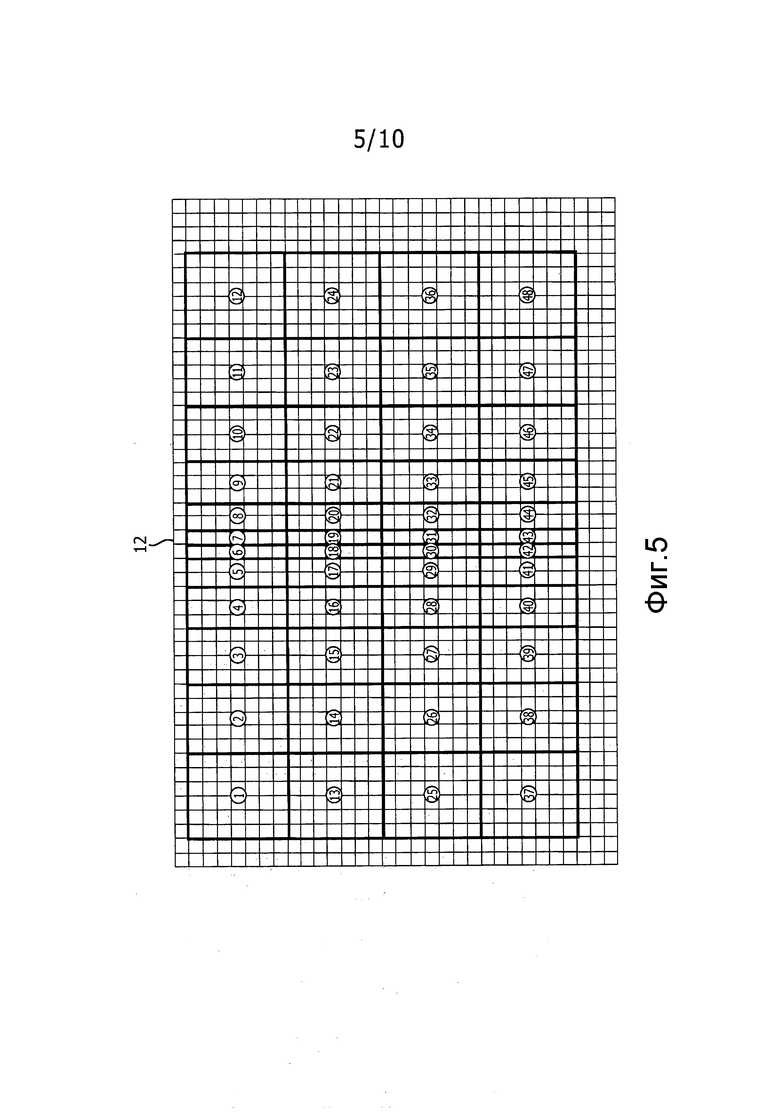
Фигура 5 иллюстрирует 2D матричный преобразователь с пэтчами разного размера для использования с 48-жильным кабелем или 48-канальным формирователем лучей системы.
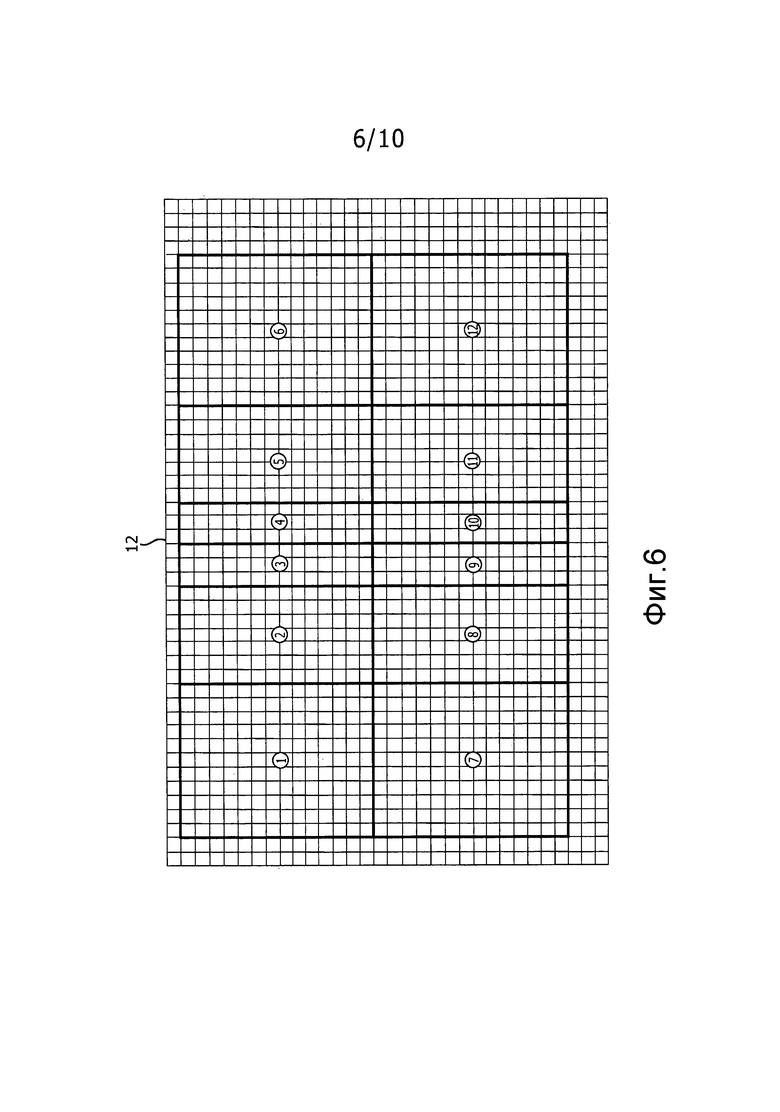
Фигура 6 иллюстрирует 2D матричный преобразователь с пэтчами разного размера для использования с 12-жильным кабелем или 12-канальным формирователем лучей системы.
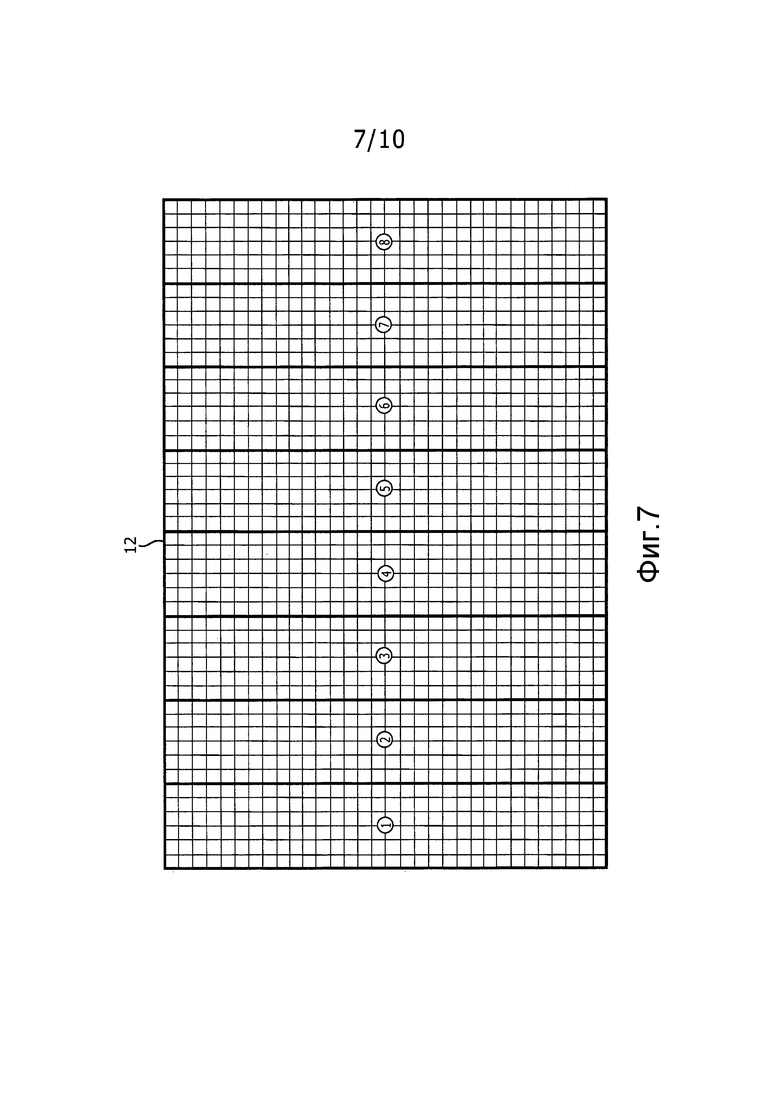
Фигура 7 иллюстрирует 2D матричный преобразователь с пэтчами одинакового размера для использования с 8-жильным кабелем или 8-канальным формирователем лучей системы.
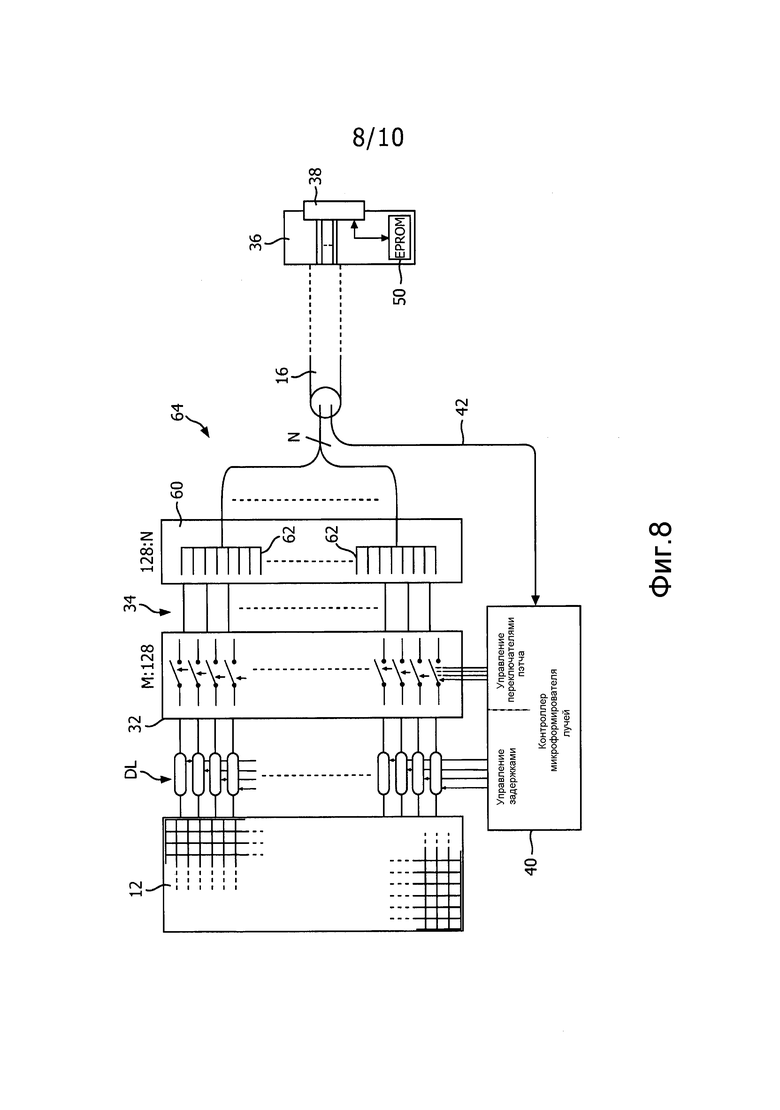
Фигура 8 иллюстрирует второй пример матричного датчика с микроформирователем лучей и ультразвуковую систему, выполненную в соответствии с принципами настоящего изобретения, к которой подсоединено заранее заданное количество жил кабеля или каналов формирователя лучей системы.
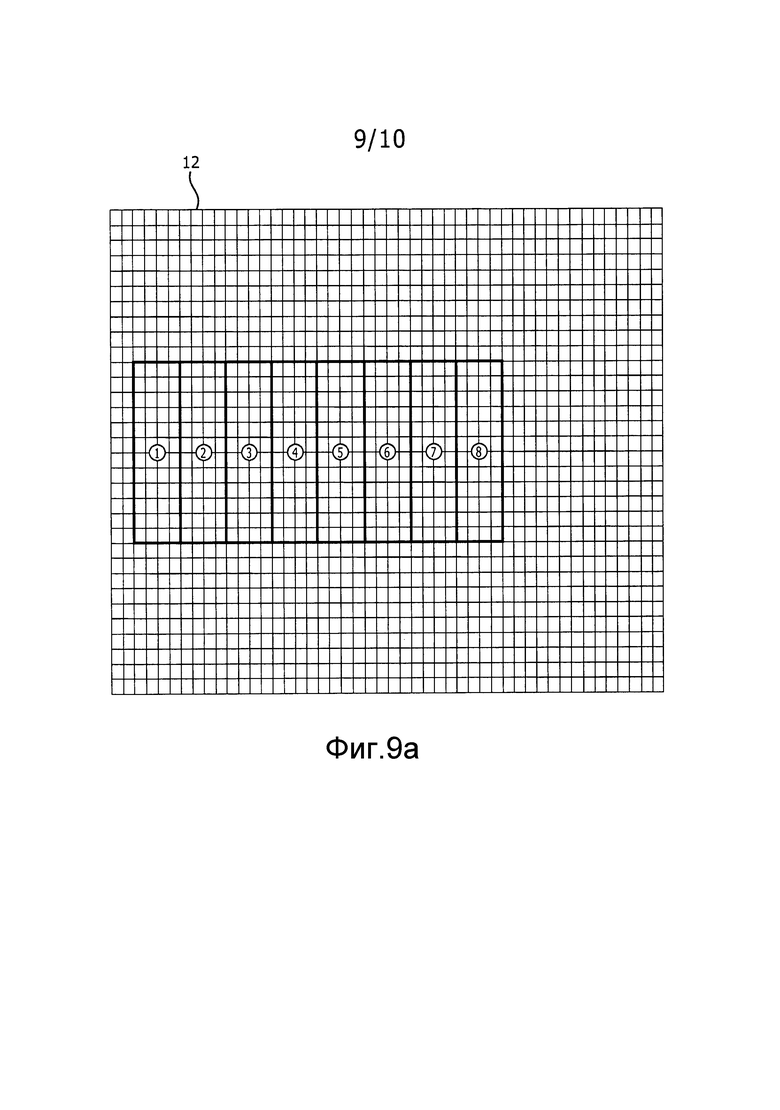
Фигура 9а иллюстрирует 2D матричный преобразователь с первой апертурой из восьми пэтчей одинакового размера.
Фигура 9b иллюстрирует 2D матричный преобразователь на Фигуре 9а после перемещения апертуры на Фигуре 9а в другое положение на матрице.
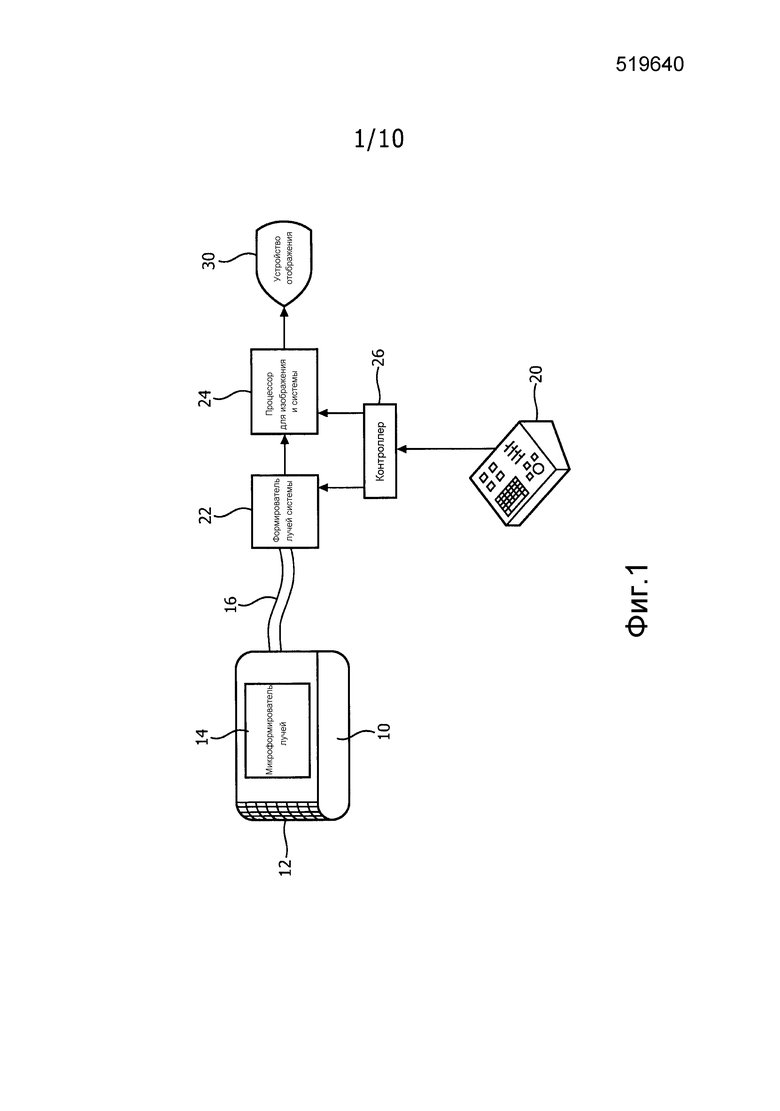
Сначала со ссылкой на Фигуру 1 в форме блок-схемы показана ультразвуковая система, выполненная в соответствии с принципами настоящего изобретения. Датчик 10 имеет преобразователь 12 с двумерной решеткой (двумерный матричный преобразователь 12), который в этом примере изогнут в направлении высоты, такой как преобразователь, показанный в патенте США 7927280 (Davidsen). Элементы матрицы соединены с микроформирователем 14 лучей, расположенным в датчике позади матрицы преобразователя. Микроформирователь лучей подает тактированные импульсы передачи к элементам матрицы для передачи лучей в требуемых направлениях и к требуемым фокусным точкам в поле трехмерного изображения перед матрицей. Эхо-сигналы от передаваемых лучей принимаются элементами матрицы и соединяются с элементами задержки микроформирователя 14 лучей, где они по отдельности задерживаются. Задержанные сигналы группы элементов преобразователя, содержащей пэтч, объединяются для формирования частичного суммарного сигнала для пэтча. Как используется здесь, выражение "пэтч" относится к группе элементов преобразователя, которые работают вместе и имеют их сигналы, по отдельности задержанные в отношении опорного сигнала и далее объединенные микроформирователем лучей для формирования одного сигнала для жилы датчика или канала формирователя лучей ультразвуковой системы. В типовом варианте выполнения объединение выполняется путем соединения задержанных сигналов от элементов пэтча с общей шиной, исключая необходимость суммирующих схем или других сложных схем. Шина каждого пэтча соединена с жилой кабеля 16, которая проводит сигнал пэтча к базовому блоку системы. В базовом блоке системы сигналы пэтча оцифровываются и соединяются с каналами формирователя 22 лучей системы, который подходящим образом задерживает каждый сигнал пэтча. Задержанные сигналы пэтча далее объединяются для формирования когерентного управляемого и сфокусированного приемного луча. Сигналы луча от поля трехмерного изображения обрабатываются процессором 24 сигналов и изображений для получения 2D или 3D изображений для отображения на устройстве 30 отображения изображений. Управление параметрами ультразвуковой системы, такими как выбор датчика, управление лучами и фокусирование и обработка сигналов и изображений выполняется под управлением контроллера 26, который соединен с различными модулями системы. В случае датчика 10 некоторая из этой информации управления выдается от базового блока системы по линиям данных кабеля 16, как описано более полно ниже. Пользователь управляет многими из этих рабочих параметров посредством панели 20 управления.
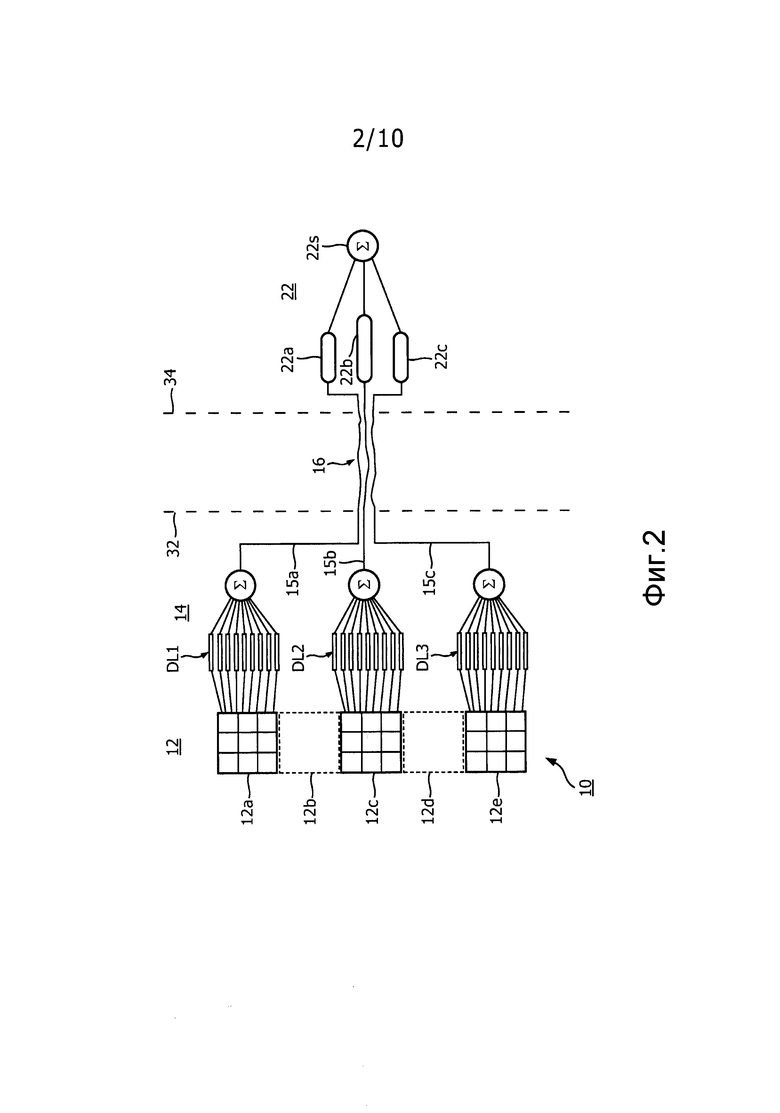
Фигура 2 иллюстрирует концепцию микроформирователя лучей с частичным суммированием. Чертеж на Фигуре 2 разделен на три области пунктирными линиями 32 и 34. Компоненты датчика 10 показаны слева от линии 32, компоненты базового блока системы показаны справа от линии 34, а кабель 16 показан между двумя линиями. Двумерная матрица 12 датчика разделена на пэтчи из смежных элементов преобразователя. Пять пэтчей матрицы 12 показаны на чертеже, причем каждый включает в себя девять близлежащих элементов. Каналы микроформирователя лучей для пэтчей 12а, 12с и 12е показаны на чертеже. Девять элементов пэтча 12а соединены с девятью линиями задержки микроформирователя лучей, обозначенными позицией DL1. Подобным образом девять элементов пэтчей 12с и 12е соединены с линиями задержки, обозначенными позициями DL2 и DL3. Задержки, передаваемые этими линиями задержки, зависят от многочисленных переменных, таких как размер матрицы, шаг элемента, расстояние и размеры пэтча, диапазон управления лучами и других. Каждая из групп DL1, DL2, и DL3 линий задержки задерживает сигналы от элементов их соответственного пэтча до общего времени или опорной фазы для пэтча. Далее девять задержанных сигналов от каждой группы линий задержки объединяются соответственным сумматором Σ для формирования частичного суммарного сигнала матрицы от пэтча элементов. Каждый частичный суммарный сигнал отправляется на отдельную шину 15a, 15b и 15c, каждая из которых соединена с жилой кабеля 16, которая проводит частичные суммарные сигналы к базовому блоку системы. В базовом блоке системы каждый частичный суммарный сигнал подается к линии 22а, 22b, 22с задержки формирователя 22 лучей системы. Эти линии задержки фокусируют частичные суммарные сигналы в общий луч на выходе сумматора 22s формирователя лучей системы. Далее полностью сформированный луч передается к процессору сигналов и изображений для дальнейшей обработки и отображения. Несмотря на то, что пример на Фигуре 2 показан с 9-элементными пэтчами, будет принято во внимание, что построенная система микроформирователя лучей в общем будет иметь пэтчи с большим количеством элементов, таким как 12, 20, 48 или 70 элементов или более. Элементы пэтча могут быть смежными друг к другу, могут быть разнесены или равномерно перемешаны в шахматной конфигурации с элементами с нечетным номером, объединенными в одном пэтче, и элементами с четным номером, объединенными в другом пэтче. Пэтчи могут иметь квадратную, прямоугольную, ромбовидную, гексагональную или любую другую требуемую форму.
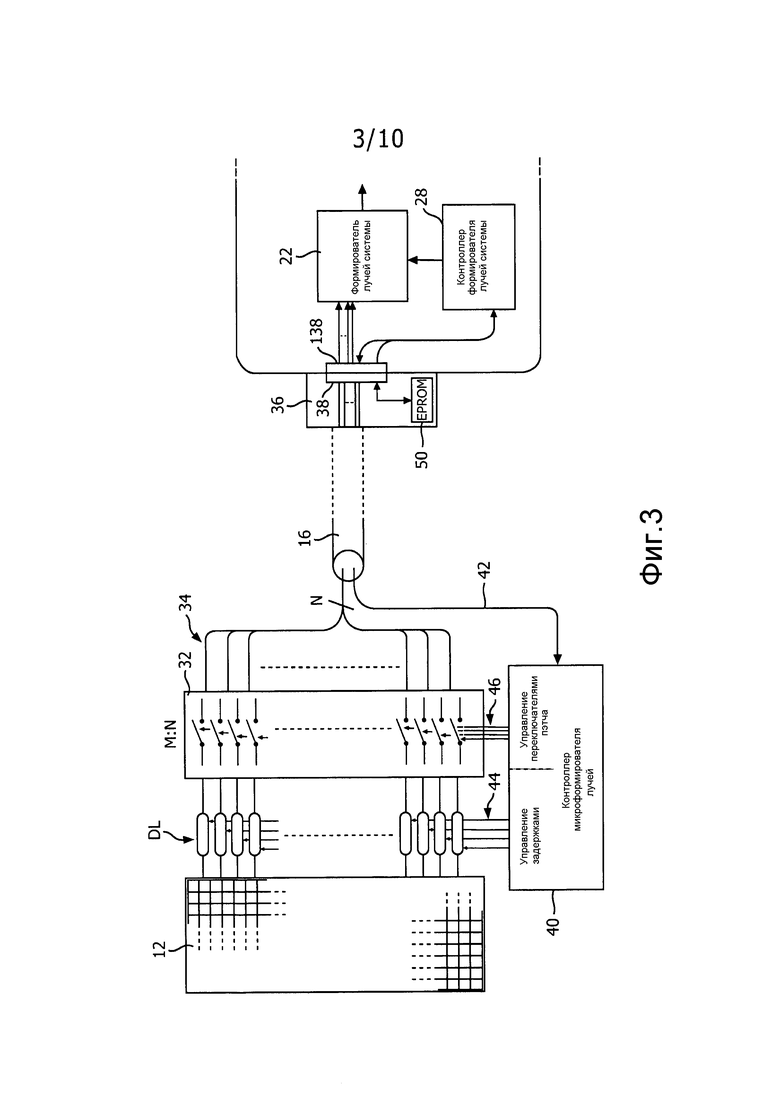
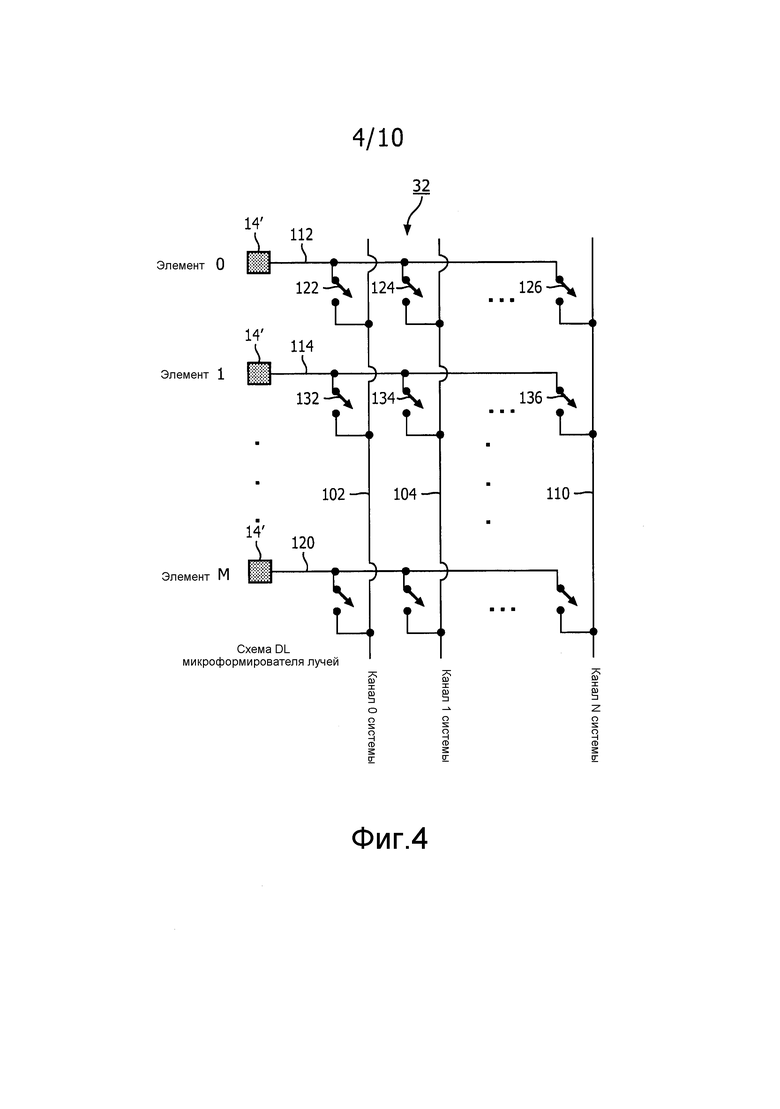
Фигура 3 иллюстрирует матричный датчик 10 и ультразвуковую систему 100 с базовым блоком в соответствии с принципами настоящего изобретения. Двумерная матрица 12 имеет ее отдельные элементы преобразователя, соединенные с управляемыми линиями DL задержки микроформирователя 14 лучей. Контроллер 40 микроформирователя лучей в датчике принимает сигналы управления по одной или более линиям 42. Контроллер микроформирователя лучей подает сигналы управления по линиям 44, которые устанавливают задержки линий DL задержки для сигналов элементов преобразователя. Эти задержки являются подходящими для требуемого размера и формы пэтча. Задержанные сигналы элементов преобразователя соединяются с матрицей 32 переключателей, которая направляет сигналы от элементов одного и того же пэтча к одному выходу 34. Например, может быть необходимо объединять задержанные сигналы 192 элементов для формирования одного сигнала пэтча, как показано на Фигуре 7 ниже. Переключатели матрицы 32 переключателей замыкаются для присоединения задержанных сигналов требуемых 192 элементов к общей шине. Замыкание переключателей и, таким образом, конфигурация пэтча управляется сигналами управления переключателя пэтча по линиям 46, обеспеченным контроллером 40 микроформирователя лучей. На Фигуре 4 показана очень гибкая матрица переключателей, которая позволяет любому задержанному сигналу элемента использоваться в любом пэтче. Фигура 4 иллюстрирует матрицу перекрестного переключения, пригодную для выборочного соединения задержанных сигналов от микроформирователя 14 лучей датчика с жилами кабеля 16 и каналами формирователя 22 лучей системы. Каждый элемент 2D матричного преобразователя, такой как элемент 0, элемент 1,... элемент М, соединяется со схемой 14' задержки микроформирователя 14 лучей, которая передает подходящую задержку каждому принимаемому сигналу. Каждый задержанный сигнал элемента проводится по линии 112, ...114 ,... 120 к рычагам электронных переключателей, таким как 122, 124, ... 126 и 132, 134, 136. Один из электронных переключателей на линии замыкается для соединения сигнала от этого элемента с выбранным каналом формирователя лучей системы, таким как канал 0 системы, канал 1 системы ,... канал N системы. Путем выборочного замыкания требуемого переключателя в матрице перекрестного переключения любой задержанный сигнал элемента может отправляться на шину 102, 104,... 110, чтобы суммироваться с другими сигналами на шине и подаваться к жиле кабеля и оттуда к каналу формирователя 22 лучей системы для завершения операции формирования лучей. Таким образом, матрица 32 переключателей способна направлять задержанные сигналы М элементов преобразователя к N выходам 32 сигнала пэтча, которые соединяются кабелем 16 с формирователем 22 лучей системы.
Кабель 16 датчика, который может составлять метр в длину или больше, оканчивается в соединителе 36 датчика. Сигнальные жилы пэтча кабеля оканчиваются на штырях блока 38 соединителя соединителя 36 датчика. В соединителе датчика расположена EPROM 50, которая содержит данные, идентифицирующие датчик, и его конкретные характеристики (ID датчика) для ультразвуковой системы, с которой датчик соединен. EPROM 50 также соединена со штырями блока 38 соединителя. Когда соединитель 36 датчика подключается к сопряженному соединителю ультразвуковой системы 100, блок 38 соединителя соединяется с сопряженным блоком 138 системы, а сигналы пэтча тем самым соединяются с формирователем 22 лучей системы. Контроллер 28 формирователя лучей системы соединяется с формирователем 22 лучей системы для управления работой формирователя лучей системы. Контроллер формирователя лучей системы также присоединяется для приема данных ID датчика от EPROM 50 датчика, которая идентифицирует датчик для контроллера и позволяет устанавливать формирователь 22 лучей для работы с конкретным датчиком. Контроллер формирователя лучей системы в этом примере дополнительно соединяется с одной или более жил кабеля датчика для подачи информации о формирователе лучей системы матричному датчику. Эта информация о системе соединяется с контроллером 40 микроформирователя лучей, как обозначено позицией 42, чтобы позволять контроллеру микроформирователя лучей устанавливать матричный датчик для работы с ультразвуковой системой, с которой он соединен.
Работа матричного датчика и ультразвуковой системы на Фигуре 3 выглядит следующим образом. Когда соединитель 36 датчика подключается к ультразвуковой системе 100, энергия от ультразвуковой системы приводит в действие компоненты матричного датчика. EPROM обеспечивает информацию об ID датчика ультразвуковой системе, и система теперь знает тип датчика, который был подсоединен. Предположим в качестве примера, что формирователь 22 лучей системы имеет 128 каналов и что матричный датчик 10 имеет 128 выходов 34 пэтчей, которые соединены с блоком 38 соединителя с помощью 128 сигнальных жил пэтча в кабеле 16. Так как микроформирователь лучей в этом примере имеет не более 128 выходов 34, на которые могут выдаваться 128 задержанных и суммированных сигналов пэтча, он может выдавать не более 128 частично суммированных сигналов пэтча к формирователю лучей системы для завершения процесса формирования лучей. Это максимальное количество частично суммированных сигналов пэтча может обрабатываться формирователем лучей системы, имеющим 128 или более каналов формирователя лучей. В этом примере контроллер формирователя лучей системы устанавливает формирователь лучей системы для выполнения окончательного формирования лучей для 128 частичных суммарных сигналов пэтча, выданных датчиком. Контроллер 28 формирователя лучей системы сообщает датчику посредством кабеля 16 и линий 42 о том, что формирователь лучей системы имеет 128 каналов, а контроллер 40 микроформирователя лучей отвечает путем установки элементов задержки DL микроформирователя лучей и переключателей матрицы 32 переключателей для обеспечения 128 частичных суммарных сигналов пэтча от всех 128 выходов 34 к формирователю 22 лучей системы. Далее формирование изображения продолжается с 128 сигналами пэтчей датчика и выхода датчика и формированием лучей системы со 128 каналами.
Предположим в качестве другого примера, что ультразвуковая система 100 имеет формирователь лучей системы с 48 каналами. Матричный датчик теперь должен быть выполнен с возможностью работать с этим формирователем лучей с меньшим количеством каналов, чем максимум 128 сигналов выхода пэтча, который микроформирователь лучей способен обеспечивать. Контроллеру 40 микроформирователя лучей сообщается о 48-канальном формирователе лучей системы посредством линий 42, и он отвечает путем установки переключателей матрицы 32 переключателей так, что частичные суммарные сигналы пэтча для 48 пэтчей выводятся на 48 из 128 выходов 34. Остальные выходы не требуются для сигналов пэтча. Задержки линий DL задержки для элементов матрицы устанавливаются сигналами управления задержки по линиям 44, выданными контроллером микроформирователя лучей. Задержки являются подходящими для тех из 48 пэтчей, в которых сгруппированы элементы 2D матричной матрицы. Одна такая конфигурация элемента 48 пэтчей показана на Фигуре 5, которая иллюстрирует использование 48 пэтчей различного размера. Меньшие пэтчи расположены в центре преобразователя с матрицей, а большие пэтчи находятся на боковых сторонах в направлении азимута. Вертикальный размер чертежа представляет собой направление высоты. Переключатели матрицы 32 переключателей объединяют по отдельности задержанные сигналы от элементов каждого пэтча и присоединяют получающиеся в результате частичные суммарные сигналы к 48 выходам 34. Жилы кабеля, которые несут эти 48 сигналов пэтча, соединены с помощью блоков 38 и 138 соединителя датчика с входами 48 каналов формирователя 22 лучей системы. Далее формирование изображение продолжается с формированием лучей системы с 48 каналами.
Таким образом, можно видеть, что матричный датчик настоящего изобретения должен работать с формирователем лучей системы, имеющим число каналов, равное или большее максимального количества сигналов пэтча, которое матричный датчик может выдавать, контроллер микроформирователя лучей устанавливает задержки и суммирование задержанных сигналов, чтобы выдавать его максимальное количество сигналов пэтча, которые соединяются с формирователем лучей системы для завершения формирования лучей. Когда матричный датчик должен работать с формирователем лучей системы, имеющим число каналов, которое меньше максимального, контроллер микроформирователя лучей устанавливает задержки и суммирование задержанных сигналов, чтобы выдавать некоторое количество частично сформированных формирователем лучей сигналов пэтча, которое меньше максимального.
Фигура 6 иллюстрирует конфигурацию пэтча преобразователя 12 с матричной матрицей, когда требуется только двенадцать пэтчей для 12-канального формирователя лучей системы. В таком случае элементы задержки и матрица переключателей устанавливаются, чтобы обеспечивать двенадцать частичных суммарных сигналов пэтча на двенадцати выходах 34 матрицы переключателей. Двенадцать сигналов пэтча проводятся по кабелю 16 и подаются на входы канала 12-канального формирователя лучей системы. Фигура 7 иллюстрирует другую конфигурацию матричного пэтча, в котором все элементы 2D матрицы 12 сгруппированы в восемь пэтчей одинакового размера. Далее линии DL задержки и матрица 32 переключателей выдают восемь сигналов пэтча на восьми из 128 ("N") выходах матрицы переключателей и жилах кабеля, которые подаются к восьми входам канала 8-канального формирователя лучей системы.
Несмотря на то, что можно увидеть, что матричный датчик на Фигуре 3 способен работать со множеством различных формирователей лучей системы, альтернативно может быть необходимо выполнять матричный датчик с возможностью использования только с одним формирователем лучей системы. Это может быть выполнено с большей частью тех же самых компонентов датчика, показанных на Фигуре 3, в частности с такой же матрицей преобразователя и пакетом микроформирователя лучей. Таким образом, один и тот же пакет преобразователя может быть использован для различных датчиков для различных ультразвуковых систем. Специальная конфигурация датчика также может обеспечивать матричный датчик уменьшенной стоимости. Часто происходит так, что кабель датчика представляет собой наиболее дорогостоящий компонент датчика, при этом стоимость увеличивается с количеством жил в кабеле. Если матричный датчик предназначен строго для использования с 8-канальным формирователем лучей системы, например, требуется только восемь сигнальных жил в кабеле для сигналов пэтча, а не 128 сигнальных жил. Полная стоимость матричного датчика уменьшается с использованием кабеля с только восемью сигнальными жилами пэтча вместо полного комплекта из 128 жил.
Пакет преобразователя с матрицей переключателей, такой как матрица 32 переключателей на Фигуре 3, может быть использован со множеством различных формирователей лучей системы путем конфигурирования переключателей матрицы 32 так, что объединение M:N задержанных сигналов от M элементов матрицы до N сигналов выхода пэтча приводит к конечному требуемому количеству выходов сигнала пэтча. Например, N может составлять 8, 16, 48 или любое другое количество выходов пэтча, соответствующее количеству каналов формирователя лучей системы. Также возможно использовать такую же матрицу переключателей с 128 выходами путем разделения объединения сигналов на два этапа, при этом матрица 32 переключателей выдает 128 сигналов пэтча, которые далее дополнительно объединяются до конечного меньшего количества требуемых сигналов пэтча вторым объединителем сигналов. Когда матричный датчик должен работать только с одной конфигурацией формирователя лучей системы, этот второй объединитель сигналов может представлять собой подсоединенный объединитель 60 сигналов, который показан на Фигуре 8. Подсоединенный проводами объединитель 60 сигналов может представлять собой плату с печатной схемой или гибкую схему, где сигналы объединяются с помощью соединенных дорожек 62 платы с печатной схемой или гибкой платы, например. Количество соединенных дорожек 62 формирует конечное количество требуемых сигналов пэтча на выходах 64. В матричном датчике на Фигуре 8 матрица 32 переключателей выполняет объединение M:128 сигналов до 128 выходов 34 матрицы 32 переключателей, а второй объединитель 60 сигналов дополнительно уменьшает количество сигналов пэтча путем объединения 128 сигналов пэтча для выдачи конечного требуемого фиксированного количества сигналов N пэтча. Например, если матричный датчик на Фигуре 8 должен работать только с 8-канальным формирователем лучей системы, второй объединитель 60 сигналов будет иметь восемь наборов соединенных дорожек 62, выдающих восемь выходов 64 пэтча. Восемь выходов 64 пэтча соединяются с N сигнальными жилами пэтча кабеля 16, где N составляет восемь. Когда соединитель 36 датчика подключается к ультразвуковой системе с 8-канальным формирователем лучей системы, восемь сигналов пэтча, проводимые по кабелю, соединяются с восемью каналами формирователя лучей системы. Таким образом, семейство датчиков для формирователей лучей системы с различным числом каналов может быть выполнено с использованием одинаковых матричного преобразователя, линий DL задержки, матрицы 32 переключателей и контроллера 40 микроформирователя лучей в каждом датчике, но с другим подсоединенным вторым объединителем 60 сигналов и кабелем датчика для определенного количества каналов каждого другого формирователя лучей системы. Таким образом, один и тот же набор преобразователя может быть использован в каждом датчике с недорогим подсоединенным объединителем и кабелем с уменьшенным количеством жил, соответствующим конфигурации каналов формирователя лучей системы. Различные соединители 36 датчика и блоки 38 соединителя с уменьшенным числом штырей также могут быть применены для дополнительного уменьшения стоимости при необходимости.
Фигуры 9а и 9b иллюстрируют конфигурации пэтча для матричного датчика, выполненного, как показано на Фигуре 8. Эти конфигурации иллюстрируют использование восьми пэтчей на матрице 12 для использования с 8-канальным формирователей лучей системы. Каждый из восьми пэтчей состоит из 48 элементов преобразователя в этом примере, в общей сложности 384 элементов в активной апертуре восьми пэтчей 1536-элементной матрицы 12. Задержки линий DL задержки регулируются по размерам и положениям пэтча, а переключатели матрицы 32 переключателей устанавливаются для объединения задержанных сигналов от трех элементов преобразователя на каждом из 128 выходов матрицы переключателей. Таким образом матрица переключателей обеспечивает объединение М:128 задержанных сигналов, где М представляет собой 384 элементов восьми пэтчей. Во-вторых, далее подсоединенный объединитель 60 выполняет объединение 128:N, где N составляет восемь, объединяя шестнадцать из выходов 34 матрицы переключателей в один конечный сигнал пэтча на выходе 64. Далее восемь сигналов пэтча проводятся по восьми сигнальным жилам пэтча кабеля 16 (N=8) для завершения формирования лучей в 8-канальном формирователе лучей системы.
Фигура 9b показывает такую же апертуру из восьми пэтчей, но с апертурой, смещенной на один элемент вправо. Таким образом активная апертура перемещается по матрице в направлении высоты для выполнения линейного сканирования матрицы. Чтобы сканировать с этой перемещенной апертурой, элементы задержки DL и переключатели матрицы переключателей должны быть установлены для нового перемещенного положения пэтчей. Как только элементы задержки и переключатели матрицы 32 были установлены для новых положений пэтча, другой луч передается и принимается с нового положения апертуры, а второй объединитель 60 выполняет объединение 128:8 как и раньше, чтобы выдавать восемь новых сигналов пэтча к формирователю лучей системы. Апертура может изменяться не только от луча к лучу, как показано на Фигурах 9а и 9b, апертура также может изменяться во время приема луча, чтобы увеличивать апертуру с приемом сигнала с увеличивающихся глубин луча, как описано в заявке на патент США №61/644524, поданной 9 мая 2012 г., содержимое которой включено здесь путем ссылки.
| название | год | авторы | номер документа |
|---|---|---|---|
| УЛЬТРАЗВУКОВОЙ ЗОНД-ПРЕОБРАЗОВАТЕЛЬ С ФОРМИРОВАТЕЛЕМ МИКРОПУЧКА ДЛЯ МУЛЬТИЛИНЕЙНОЙ ВИЗУАЛИЗАЦИИ | 2013 |
|
RU2656184C2 |
| МАТРИЦЫ УЛЬТРАЗВУКОВЫХ ПРЕОБРАЗОВАТЕЛЕЙ С ПЕРЕМЕННЫМИ ГЕОМЕТРИЯМИ УЧАСТКОВ ПОВЕРХНОСТИ | 2013 |
|
RU2638967C2 |
| ОБЛЕГЧЕННЫЙ БЕСПРОВОДНОЙ УЛЬТРАЗВУКОВОЙ ДАТЧИК | 2008 |
|
RU2502470C2 |
| ЗОНД С УЛЬТРАЗВУКОВЫМ МАТРИЧНЫМ ПРЕОБРАЗОВАТЕЛЕМ ДЛЯ ВИЗУАЛИЗАЦИИ СДВИГОВЫХ ВОЛН | 2016 |
|
RU2715598C2 |
| БЕСПРОВОДНОЕ УПРАВЛЕНИЕ ДЛЯ ЧРЕСПИЩЕВОДНОЙ ЭХОКАРДИОГРАФИИ | 2019 |
|
RU2795943C2 |
| УЛЬТРАЗВУКОВАЯ ДИАГНОСТИКА АНАТОМИЧЕСКИХ ОСОБЕННОСТЕЙ | 2018 |
|
RU2778840C2 |
| БЛОК УПРАВЛЕНИЯ УЛЬТРАЗВУКОВЫМИ ИССЛЕДОВАНИЯМИ | 2019 |
|
RU2800255C2 |
| УЛЬТРАЗВУКОВОЙ МАТРИЧНЫЙ ЗОНД С РАССЕИВАЮЩИМ ТЕПЛО КАБЕЛЕМ И ТЕПЛООБМЕНОМ ЧЕРЕЗ ОПОРНЫЙ БЛОК | 2013 |
|
RU2620867C2 |
| УЛЬТРАЗВУКОВАЯ СИСТЕМА ДИАГНОСТИЧЕСКОЙ ВИЗУАЛИЗАЦИИ С ЗАВИСЯЩЕЙ ОТ КОНТЕКСТА ПАНЕЛЬЮ УПРАВЛЕНИЯ | 2012 |
|
RU2617255C2 |
| ИНТЕЛЛЕКТУАЛЬНАЯ УЛЬТРАЗВУКОВАЯ СИСТЕМА | 2018 |
|
RU2759235C2 |

Использование: для ультразвуковой медицинской диагностики. Сущность изобретения заключается в том, что матричный датчик преобразователя имеет двумерную решетку элементов преобразователя, соединенную с регулируемыми элементами задержки для каждого элемента. Управляемая матрица переключателей объединяет множество неодинаково задержанных сигналов элемента для формирования сигнала пэтча и выдачи множества сигналов пэтча таким образом. Матрица переключателей определяет конфигурацию пэтча с учетом количества каналов формирователя лучей системы, который завершает формирование лучей, а задержки элементов устанавливаются с учетом конфигурации используемых элементов в каждом пэтче. Формирование сигнала пэтча может выполняться в два этапа, включая этап, который включает в себя подсоединенный объединитель сигналов. Матричный датчик может работать с формирователями лучей системы разного размера или одинаковым набором преобразователей, используемым в различных датчиках, выполненных для конкретных конфигураций формирователя лучей. Технический результат: обеспечение возможности конфигурировать 2D матрицу для работы с различными формирователями лучей при сохранении высокого разрешения получающегося изображения. 3 н. и 12 з.п. ф-лы, 10 ил.
1. Ультразвуковой матричный датчик, содержащий:
матрицу (12) элементов преобразователя;
микроформирователь (14) лучей, соединенный с элементами преобразователя матрицы, при этом микроформирователь лучей содержит:
множество управляемых элементов (112, 114, 116, 118, 120) задержки, соединенных с элементами матрицы, чтобы выдавать неодинаково задержанные сигналы преобразователя; и
множество управляемых переключателей (122, 124, 126, 132, 134, 136), присоединенных для объединения неодинаково задержанных сигналов преобразователя для формирования множества сигналов пэтча,
причем микроформирователь лучей может выдавать максимальное количество сигналов пэтча;
контроллер (40) микроформирователя лучей, присоединенный для управления управляемыми элементами задержки и управляемыми переключателями;
соединитель (36) датчика, который соединяет матричный датчик с формирователем (22) лучей системы ультразвуковой системы, причем формирователь лучей системы имеет заранее заданное количество каналов формирователя лучей; и
кабель датчика, соединенный с микроформирователем (14) лучей и соединителем (36) датчика, который соединяет множество сигналов пэтча с формирователем лучей системы,
причем контроллер (40) микроформирователя лучей управляет элементами задержки и переключателями с возможностью выдавать максимальное количество сигналов пэтча, когда заранее заданное количество каналов формирователя лучей системы равно или превышает максимальное количество, и с возможностью выдавать некоторое количество сигналов пэтча, которое меньше максимального количества, когда заранее заданное количество каналов формирователя лучей системы меньше максимального количества.
2. Ультразвуковой матричный датчик по п. 1, в котором
контроллер (40) микроформирователя лучей дополнительно присоединен для приема сигнала посредством кабеля датчика, который идентифицирует количество сигналов пэтча, которое должно быть выдано микроформирователем (14) лучей.
3. Ультразвуковой матричный датчик по п. 1, в котором сигнал, который идентифицирует количество сигналов пэтча, идентифицирует количество каналов формирователя лучей системы.
4. Ультразвуковой матричный датчик по п. 1, в котором сигнал, который идентифицирует количество каналов формирователя лучей системы, выдается контроллером (28) формирователя лучей системы и соединяется с контроллером (40) микроформирователя лучей путем соединителя датчика и кабеля датчика.
5. Ультразвуковой матричный датчик по п. 1, дополнительно содержащий устройство памяти, которое хранит информацию об ультразвуковом матричном датчике (10),
причем информация об ультразвуковом матричном датчике подается на ультразвуковую систему (100), когда соединитель (36) датчика соединяет матричный датчик с формирователем (22) лучей системы.
6. Ультразвуковой матричный датчик по п. 1, в котором кабель датчика дополнительно содержит множество сигнальных жил пэтча, которое равно количеству сигналов пэтча, формируемых микроформирователем лучей под управлением контроллера (40) микроформирователя лучей.
7. Ультразвуковой матричный датчик по п. 1, в котором максимальное количество сигналов пэтча, которое может выдаваться микроформирователем лучей, составляет 128.
8. Ультразвуковой матричный датчик по п. 7, в котором заранее заданное количество каналов формирователя лучей системы составляет 48 или меньше.
9. Ультразвуковой матричный датчик, содержащий:
матрицу (12) элементов преобразователя;
микроформирователь (14) лучей, соединенный с элементами преобразователя матрицы, при этом микроформирователь лучей содержит:
множество управляемых элементов (112, 114, 116, 118, 120)
задержки, соединенных с элементами матрицы, чтобы выдавать неодинаково задержанные сигналы преобразователя; и
множество управляемых переключателей (122, 124, 126), присоединенных для объединения неодинаково задержанных сигналов преобразователя для формирования заранее заданного количества сигналов пэтча;
объединитель (60) сигналов, присоединенный для приема заранее заданного количества сигналов пэтча и объединения сигналов пэтча, чтобы выдавать фиксированное количество сигналов выхода пэтча, которое меньше заранее заданного количества сигналов пэтча;
контроллер (40) микроформирователя лучей, присоединенный для управления управляемыми элементами задержки и управляемыми переключателями;
соединитель (36) датчика, который соединяет матричный датчик с формирователем (22) лучей системы ультразвуковой системы (100), причем формирователь (22) лучей системы имеет некоторое количество каналов формирователя лучей, равное фиксированному количеству сигналов выхода пэтча; и
кабель датчика, соединенный с микроформирователем (14) лучей и соединителем (36) датчика, который соединяет сигналы выхода пэтча с формирователем (22) лучей системы.
10. Ультразвуковой матричный датчик по п. 9, дополнительно содержащий устройство памяти, которое хранит информацию об ультразвуковом матричном датчике,
причем информация об ультразвуковом матричном датчике подается на ультразвуковую систему (100), когда соединитель датчика соединяет матричный датчик с формирователем (22) лучей системы.
11. Ультразвуковой матричный датчик по п. 9, в котором кабель датчика дополнительно содержит множество сигнальных жил пэтча, которое равно фиксированному количеству сигналов выхода пэтча, выдаваемых микроформирователем (14) лучей.
12. Ультразвуковой матричный датчик по п. 9, в котором заранее заданное количество сигналов пэтча, которое может выдаваться микроформирователем (14) лучей, составляет 128,
причем количество каналов формирователя лучей системы составляет 48 или меньше.
13. Множество ультразвуковых матричных датчиков по п. 9, при этом множество ультразвуковых матричных датчиков содержит ультразвуковой матричный датчик по п. 9; и
второй ультразвуковой матричный датчик, содержащий:
матрицу (12) элементов преобразователя, которая является такой же, как у матричного датчика по п. 9;
микроформирователь (14) лучей, который является таким же, как у матричного датчика по п. 9, за исключением того, что объединитель (60) сигналов содержит объединитель сигналов, присоединенный для приема заранее заданного количества сигналов пэтча и объединения сигналов пэтча, чтобы выдавать второе фиксированное количество сигналов выхода пэтча, которое меньше заранее заданного количества сигналов пэтча;
контроллер (40) микроформирователя лучей, который является таким же, как у матричного датчика по п. 9;
соединитель (36) датчика, который соединяет матричный датчик с формирователем (22) лучей системы второй ультразвуковой системы, причем формирователь лучей системы второй ультразвуковой системы имеет некоторое количество каналов формирователя лучей, равное второму фиксированному меньшему количеству; и
кабель датчика, соединенный с микроформирователем (14) лучей и соединителем датчика, который соединяет сигналы выхода пэтча с формирователем лучей системы второй ультразвуковой системы.
14. Множество ультразвуковых матричных датчиков по п. 13, в котором соединитель датчика второго ультразвукового матричного датчика отличается от соединителя датчика первого ультразвукового матричного датчика.
15. Множество ультразвуковых матричных датчиков по п. 13, в котором кабель датчика первого ультразвукового матричного датчика имеет некоторое количество сигнальных жил пэтча и
в котором кабель датчика второго ультразвукового матричного датчика имеет некоторое количество сигнальных жил пэтча, которое
отличается от количества сигнальных жил пэтча первого ультразвукового матричного датчика.
| WO 2007099473A1, 07.09.2007 | |||
| US 2004168517A1, 02.09.2004 | |||
| EP 0468506A2, 29.01.1992 | |||
| US 6102860A, 15.08.2000 | |||
| Ультразвуковой преобразователь | 1973 |
|
SU942577A3 |
| УЛЬТРАЗВУКОВАЯ АНТЕННАЯ РЕШЕТКА В ВИДЕ ДВУХМЕРНОЙ МАТРИЦЫ | 1994 |
|
RU2080592C1 |

