Область техники, к которой относится изобретение
Настоящее изобретение относится главным образом к обследованию и визуализации органов пациента с использованием чреспищеводной эхокардиографии ЧПЭхоКГ (TEE, TransEsophageal Echocardiography). Например, некоторые варианты осуществления настоящего изобретения подходят для модульной адаптации ЧПЭхоКГ зондов для использования с одним или более модулями гастроскопов. Другие варианты осуществления настоящего изобретения подходят для беспроводных ЧПЭхоКГ процедур.
Уровень техники
Наблюдение за состоянием и работой сердца пациента может представлять собой трудную и опасную процедуру. Эхокардиография может уменьшить риск причинения вреда пациенту за счет использования методов ультразвуковой визуализации. При записи эхокардиограммы терапевт использует ультразвуковой зонд, содержащий один или более ультразвуковых преобразователей для получения изображений сердца пациента под различными углами. Ультразвуковые преобразователи излучают энергию в форме ультразвуковых волн, чтобы создать изображение сердца. Ультразвуковые волны частично отражаются неоднородностями, обусловленными структурой тканей, эритроцитами и другими интересующими элементами. Эхо-сигналы или отраженные ультразвуковые волны принимает ультразвуковой преобразователь и передает в сигнальный процессор. Сигнальный процессор производит обработку принимаемых ультразвуковых эхо-сигналов, чтобы получить изображение сердца вблизи того места, где расположен ультразвуковой преобразователь.
Одной распространенной эхокардиографической процедурой является трансторакальная эхокардиография ТТЭхоКГ (ТТЕ, TransThoractic Echocardiography), которая заключается в размещении ультразвукового преобразователя на грудной клетке или брюшном отделе пациента, чтобы получить изображение сердца под различными углами. Хотя ТТЭхоКГ является сравнительно неинвазивной процедурой, но ультразвуковые волны должны проходить через несколько слоев ткани и костей, чтобы достичь сердца, а эхо-волны должны пройти обратно через те же ткани и кости, чтобы дойти до ультразвукового преобразователя. Указанные толстые слои ткани и костей могут ослаблять интенсивность эхо-сигналов и ухудшать качество получаемого изображения.
Чреспищеводная эхокардиография ЧПЭхоКГ (TEE) заключается в получении ультразвукового изображения сердца с использованием ЧПЭхоКГ зонда, расположенного внутри пищевода пациента. В ЧПЭхоКГ зондах также используются ультразвуковые волны для получения изображения сердца пациента. Чреспищеводная эхокардиография может иметь преимущество, поскольку сердце расположено близко к пищеводу, что может давать более качественные изображения. Чтобы получить изображение с помощью ЧПЭхоКГ зонда, врач вводит гастроскоп, содержащий ультразвуковой преобразователь, в пищевод пациента, и направляет ультразвуковой преобразователь в область близкую к сердцу. Врач манипулирует дистальным концом гастроскопа внутри пищевода пациента, чтобы направить ультразвуковой преобразователь в нужное место и поддерживать контакт со стенкой пищевода, чтобы способствовать передаче и приему ультразвуковых волн.
Традиционные ЧПЭхоКГ зонды включают в себя рукоять и гастроскоп, содержащий ультразвуковой преобразователь и продолговатый корпус, соединенный с рукоятью. Рукоять также может быть соединена с интерфейсным кабелем, который ведет к консоли. В некоторых традиционных конструкциях рукоять, гастроскоп и консольный интерфейсный кабель образуют единый узел, в котором отдельные компоненты прикреплены друг к другу неразборным образом. Другими словами, в традиционных конструкциях не предусмотрено, чтобы врач или другой пользователь мог время от времени отделять гастроскоп от рукояти и снова соединять с рукоятью.
Размер и форма гастроскопной части, входящей в состав ЧПЭхоКГ зонда, которую врач использует для получения ультразвуковых изображений, может зависеть от физиологии пациента и конкретного типа изображения, которое хочет получить врач. Другими словами, когда врачу требуется получить ультразвуковое изображение сердца пациента, врач должен выбрать гастроскоп, который соответствует размеру и конфигурации физиологии пациента. Поскольку традиционные ЧПЭхоКГ зонды содержат неразборно скрепленные гастроскоп и другие компоненты, врач должен располагать отдельным ЧПЭхоКГ зондом, содержащим рукоять и консольный интерфейсный кабель, для каждой конфигурации гастроскопа, которую врач может использовать в своей практике. И это действительно так, хотя рукоять и консольный интерфейсный кабель не меняются от гастроскопа к гастроскопу.
Очистка традиционных ЧПЭхоКГ зондов может быть затруднительна и может грозить повреждением компонентов ЧПЭхоКГ зонда. Например, гастроскоп, который вступает в контакт с физиологией пациента, может требовать более радикальной очистки, в то время как очистка рукояти и консольного интерфейсного кабеля может быть менее строгой. Сложность очистки ЧПЭхоКГ зонда может приводить к повреждению компонентов ЧПЭхоКГ зонда.
Кроме того, при традиционной чреспищеводной эхокардиографии врач использует рентгеновское изображение пищевода пациента, чтобы направить ЧПЭхоКГ зонд в нужное место, что подвергает врача облучению, причем врач должен продолжительное время и часто под неудобным углом постоянно и стабильно удерживать в руке рукоять ЧПЭхоКГ зонда.
Из уровня техники известно устройство беспроводного ультразвукового мониторинга (WO 2010/020939), в котором данные визуализации от датчика передаются по беспроводной сети в основную систему визуализации. Известно также устройство (WO 2017/060439) управления для внутрисосудистых устройств в котором инструкции, предоставляемые в качестве входных данных контроллеру рулевого управления, преобразуются в сигналы управления для управления внутрисосудистым устройством.
Раскрытие сущности изобретения
Варианты осуществления настоящего изобретения обеспечивают усовершенствованный зонд для чреспищеводной эхокардиографии (ЧПЭхоКГ зонда), предназначенный для формирования изображений органа. К примеру, ЧПЭхоКГ зонд может включать в себя такие компоненты, как гастроскоп и рукоять, которые разъемным образом соединены друг с другом, чтобы была возможность разъединения и замены одного или более компонентов. Системы, устройства и способы, рассмотренные в настоящем описании, благоприятным образом дают возможность врачу или пользователю разбирать и снова собирать ЧПЭхоКГ зонд, используя те же самые или другие компоненты. Данное преимущество ускоряет проведение медицинских операций для врача и для пациента, и снижает риск повреждения ЧПЭхоКГ зонда во время процедур очистки.
В настоящем изобретении также описаны ЧПЭхоКГ зонды, которыми можно управлять дистанционно или беспроводным образом. Варианты осуществления настоящего изобретения также обеспечивают ЧПЭхоКГ зонд, содержащий модуль беспроводной связи, выполненный с возможностью приема и передачи электрических сигналов. К примеру, модуль беспроводной связи может быть выполнен с возможностью приема командного сигнала от удаленного пользователя, позволяя удаленному пользователю дистанционно или беспроводным образом управлять различными аспектами процедуры чреспищеводной эхокардиографии.
Модуль беспроводной связи может также быть выполнен с возможностью передачи данных ультразвуковой визуализации в консоль, расположенную в месте нахождения удаленного пользователя или вблизи этого места, чтобы дать возможность удаленному пользователю наблюдать ультразвуковое изображение. Это может сократить дозу облучения врача в операционной и упростить ЧПЭхоКГ процедуру. Кроме того, ЧПЭхоКГ зонд, оснащенный модулем беспроводной связи, может содержать описанные выше съемные компоненты, и реализовать как преимущество использования модуля беспроводной связи, так и преимущество использования съемных или модульных компонентов.
В соответствии с примером варианта осуществления изобретения предложен зонд для чреспищеводной эхокардиографии (ЧПЭхоКГ зонд). ЧПЭхоКГ зонд содержит рукоять, у которой имеется проксимальная часть, дистальная часть и интерфейс сопряжения рукояти, расположенный в дистальной части. ЧПЭхоКГ зонд может дополнительно содержать гастроскоп, соединенный с рукоятью и выполненный с возможностью размещения в пищеводе пациента. Гастроскоп может содержать проксимальную часть, дистальную часть, ультразвуковой преобразователь, размещенный в дистальной части гастроскопа, и выполненный с возможностью получения данных ультразвуковой визуализации, а также интерфейс сопряжения гастроскопа, расположенный в проксимальной части гастроскопа. Рукоять и гастроскоп могут быть разъемным образом соединены друг с другом посредством интерфейса сопряжения рукояти и интерфейса сопряжения гастроскопа, так что, когда указанные интерфейсы сопряжения соединены друг с другом, интерфейс сопряжения рукояти имеет возможность передачи электрического сигнала в гастроскоп через интерфейс сопряжения гастроскопа для управления движением дистальной части гастроскопа.
Согласно некоторым вариантам осуществления изобретения, ультразвуковой преобразователь представляет собой матрицу ультразвуковых преобразователей, а гастроскоп содержит микроформирователь луча, соединенный с матрицей ультразвуковых преобразователей. Микроформирователь луча может быть расположен в дистальной части гастроскопа. Согласно некоторым вариантам осуществления, рукоять содержит формирователь луча, соединенный с матрицей ультразвуковых преобразователей. Согласно другим вариантам, гастроскоп содержит микроформирователь луча, соединенный с матрицей ультразвуковых преобразователей и с формирователем луча. Интерфейс сопряжения рукояти и интерфейс сопряжения гастроскопа в некоторых случаях могут представлять собой интерфейс в виде подпружиненных штырей. По меньшей мере один из элементов -рукоять или гастроскоп - может содержать защелку для фиксации интерфейса сопряжения рукояти и интерфейса сопряжения гастроскопа.
Согласно некоторым вариантам осуществления, гастроскоп содержит исполнительный орган и тяговый трос, соединенный с исполнительным органом и дистальной частью гастроскопа. Исполнительный орган может быть выполнен с возможностью управления движением дистальной части гастроскопа. Рукоять может содержать контроллер, соединенный с исполнительным органом и с ультразвуковым преобразователем. Исполнительный орган может содержать мотор. Гастроскоп может содержать датчик усилия, который расположен в дистальной части гастроскопа, и который может быть выполнен с возможностью обнаружения усилия, приложенного к дистальной части гастроскопа. В некоторых случаях ЧПЭхоКГ зонд дополнительно содержит контроллер датчика усилия, соединенный с датчиком усилия и исполнительным органом. Контроллер датчика усилия может быть выполнен с возможностью управления приведением в действие тягового троса посредством исполнительного органа, на основе усилия, измеренного датчиком усилия. Датчик усилия может содержать гибкое основание, расположенное вокруг дистальной части гастроскопа. Согласно иным вариантам, рукоять содержит интерфейс сопряжения с консолью в проксимальной части рукояти. Интерфейс сопряжения с консолью может представлять собой по меньшей мере одно из следующих средств: USB интерфейс или интерфейс в виде подпружиненных штырей.
Согласно другим вариантам осуществления, ЧПЭхоКГ зонд содержит гастроскоп, выполненный с возможностью соединения с рукоятью и размещения внутри пищевода пациента. Гастроскоп может содержать проксимальную часть, дистальную часть, ультразвуковой преобразователь, размещенный в дистальной части гастроскопа, и выполненный с возможностью получения данных ультразвуковой визуализации, а также мотор и тяговый трос. В некоторых случаях тяговый трос соединен с мотором и дистальной частью гастроскопа. Мотор может быть выполнен с возможностью приема электрического сигнала от рукояти, чтобы управлять движением дистальной части гастроскопа с использованием тягового троса. Согласно некоторым вариантам осуществления, гастроскоп содержит датчик усилия, выполненный с возможностью обнаружения усилия, приложенного к дистальной части гастроскопа. ЧПЭхоКГ зонд может также содержать контроллер датчика усилия, соединенный с датчиком усилия и мотором. Контроллер датчика усилия может быть выполнен с возможностью управления приведением в действие тягового троса посредством мотора на основе усилия, измеренного датчиком усилия. Согласно другим вариантам, ЧПЭхоКГ зонд содержит датчик мотора, соединенный с мотором и выполненный с возможностью определения положения мотора. Согласно еще одним вариантам осуществления, ультразвуковой преобразователь представляет собой матрицу ультразвуковых преобразователей, при этом гастроскоп содержит микроформирователь луча, который соединен с матрицей ультразвуковых преобразователей, и расположен в дистальной части гастроскопа.
В соответствии с еще одним примером варианта осуществления изобретения предложен ЧПЭхоКГ зонд. ЧПЭхоКГ зонд содержит рукоять, соединенный с рукоятью гастроскоп, а также модуль беспроводной связи, который соединен с рукоятью и гастроскопом. Гастроскоп может быть выполнен с возможностью размещения в пищеводе пациента, и может содержать ультразвуковой преобразователь, расположенный в дистальной части гастроскопа. Гастроскоп может быть выполнен с возможностью получения данных ультразвуковой визуализации. Модуль беспроводной связи может содержать элемент беспроводной связи и микроконтроллер, соединенный с элементом беспроводной связи. Модуль беспроводной связи может быть выполнен с возможностью приема командного сигнала от консоли, расположенной на расстоянии от ЧПЭхоКГ зонда, и передачи данных ультразвукового изображения в консоль. Микроконтроллер может быть выполнен с возможностью передачи электрического сигнала в гастроскоп для управления дистальной частью гастроскопа в ответ на принятый командный сигнал.
Согласно некоторым вариантам осуществления, ЧПЭхоКГ зонд дополнительно содержит интерфейс пользователя, соединенный с рукоятью и выполненный с возможностью приема ручного ввода данных от пользователя для управления гастроскопом. Согласно другим вариантам осуществления, микроконтроллер выполнен с возможностью передачи электрического сигнала для управления движением дистальной части гастроскопа в ответ на командный сигнал. Согласно другим вариантам осуществления, гастроскоп содержит тяговый трос, соединенный с дистальной частью гастроскопа, и исполнительный орган, соединенный с тяговым тросом. Микроконтроллер может быть выполнен с возможностью передачи электрического сигнала в исполнительный орган с целью приведения в действие тягового троса для перемещения дистальной части гастроскопа. Согласно некоторым вариантам осуществления, микроконтроллер может быть выполнен с возможностью передачи электрического сигнала для управления ультразвуковым преобразователем в ответ на командный сигнал. Согласно другим вариантам осуществления, ультразвуковой преобразователь представляет собой матрицу ультразвуковых преобразователей, при этом рукоять содержит формирователь луча, соединенный с матрицей ультразвуковых преобразователей. Рукоять может также содержать сигнальный процессор, соединенный с формирователем луча. В некоторых случаях гастроскоп содержит микроформирователь луча, соединенный с матрицей ультразвуковых преобразователей и с формирователем луча. ЧПЭхоКГ зонд в некоторых случаях может дополнительно содержать батарею, выполненную с возможностью питания модуля беспроводной связи и гастроскопа.
Согласно некоторым вариантам осуществления, ЧПЭхоКГ зонд содержит интерфейс сопряжения рукояти, расположенный в дистальной части рукояти, и интерфейс сопряжения гастроскопа, расположенный в проксимальной части гастроскопа. Рукоять и гастроскоп могут быть разъемным образом соединены друг с другом посредством интерфейса сопряжения рукояти и интерфейса сопряжения гастроскопа. Интерфейс сопряжения рукояти может быть выполнен с возможностью передачи электрического сигнала в гастроскоп через интерфейс сопряжения гастроскопа для управления дистальной частью гастроскопа. Согласно некоторым вариантам осуществления, модуль беспроводной связи расположен внутри рукояти. Согласно другим вариантам, модуль беспроводной связи содержит корпус, соединенный с рукоятью, так что, когда модуль беспроводной связи соединен с рукоятью, модуль беспроводной связи передает электрический сигнал в гастроскоп. Согласно некоторым вариантам осуществления, корпус съемным образом соединяется с рукоятью по меньшей мере при помощи одного из следующих средств: USB интерфейса или интерфейса в виде подпружиненных штырей.
В соответствии с примером варианта осуществления изобретения, предложен способ для беспроводного управления ЧПЭхоКГ зондом. Способ может содержать этапы, на которых: посредством элемента беспроводной связи, соединенного с рукоятью ЧПЭхоКГ зонда, беспроводным образом принимают командный сигнал, передаваемый консолью, расположенной на расстоянии от ЧПЭхоКГ зонда, в то время как гастроскоп ЧПЭхоКГ зонда размещен в пищеводе пациента; посредством элемента беспроводной связи передают принятый командный сигнал в контроллер, соединенный с рукоятью; и в ответ на принятый командный сигнал посредством контроллера подают напряжение на исполнительный орган, соединенный с гастроскопом, для управления движением дистальной части гастроскопа внутри пищевода.
Согласно некоторым вариантам осуществления, способ может дополнительно содержать этапы, на которых: в контроллере, соединенном с рукоятью, принимают сигнал обратной связи от исполнительного органа; и на основе сигнала обратной связи посредством исполнительного органа корректируют движение дистальной части гастроскопа. В некоторых аспектах этап приема сигнала обратной связи от исполнительного органа содержит прием сигнала обнаружения усилия, а этап коррекции движения дистальной части гастроскопа содержит прекращение посредством исполнительного органа движения дистальной части гастроскопа. Согласно некоторым вариантам осуществления, способ дополнительно содержит этапы, на которых: беспроводным образом посредством элемента беспроводной связи передают в консоль сигнал обратной связи; и в ответ на принятый сигнал обратной связи активируют индикатор обнаружения усилия. Сигнал обратной связи может содержать сигнал обнаружения усилия. Согласно некоторым вариантам осуществления, способ дополнительно содержит этапы, на которых: посредством ультразвукового преобразователя, расположенного в дистальной части гастроскопа, получают данные ультразвуковой визуализации; и беспроводным образом посредством элемента беспроводной связи передают в консоль данные ультразвуковой визуализации. Способ может дополнительно содержать этапы, на которых: принимают ультразвуковой визуализации, полученные ультразвуковым преобразователем, на формирователе луча; и передают данные ультразвуковой визуализации, обработанные формирователем луча, в элемент беспроводной связи. Согласно некоторым вариантам осуществления, способ дополнительно содержит этапы, на которых: принимают данные ультразвуковой визуализации, полученные ультразвуковым преобразователем, на микроформирователе луча; и передают данные ультразвуковой визуализации, обработанные микроформирователем луча, в формирователь луча.
Дополнительные аспекты, отличительные признаки и преимущества настоящего изобретения будут понятны из последующего подробного описания.
Краткое описание чертежей
Иллюстративные варианты осуществления настоящего изобретения будут описаны со ссылками на прилагаемые чертежи, из которых:
фиг. 1 представляет вид сбоку одного варианта осуществления зонда для чреспищеводной эхокардиографии (ЧПЭхоКГ зонда), отвечающего существующему уровню техники;
фиг. 2 представляет схематический вид ЧПЭхоКГ зонда с фиг. 1, отвечающего существующему уровню техники;
фиг. 3 в аксонометрии изображает модульное устройство ультразвуковой визуализации и систему ультразвуковой визуализации, соответствующую варианту осуществления настоящего изобретения;
фиг. 4 изображает схему системы ЧПЭхоКГ зонда, соответствующего варианту осуществления настоящего изобретения;
фиг. 5А в аксонометрии изображает рукоять ЧПЭхоКГ зонда, соответствующего варианту осуществления настоящего изобретения;
фиг. 5В в аксонометрии и частично прозрачном виде изображает рукоять ЧПЭхоКГ зонда фиг. 5А, соответствующего варианту осуществления настоящего изобретения;
фиг. 6А в аксонометрии изображает проксимальную часть гастроскопа, интерфейс сопряжения гастроскопа и дистальную часть рукояти ЧПЭхоКГ зонда, соответствующего варианту осуществления настоящего изобретения, причем гастроскоп и рукоять разъединены;
фиг. 6В в аксонометрии изображает проксимальную часть гастроскопа, интерфейс сопряжения рукояти и дистальную часть рукояти ЧПЭхоКГ зонда, соответствующего варианту осуществления настоящего изобретения, причем гастроскоп и рукоять разъединены;
фиг. 7 в аксонометрии изображает ЧПЭхоКГ зонд с фиг. 6А и 6В, когда гастроскоп и рукоять сопряжены;
фиг. 8 в аксонометрии и частично прозрачном виде изображает проксимальную часть гастроскопа и рукоять, соответствующие варианту осуществления настоящего изобретения;
фиг. 9А представляет вид по вертикали и сбоку дистальной части ЧПЭхоКГ зонда, соответствующего варианту осуществления настоящего изобретения, причем показан изгиб дистальной части в направлении вперед и назад;
фиг. 9В представляет вид по вертикали и спереди дистальной части ЧПЭхоКГ зонда, соответствующего варианту осуществления настоящего изобретения, причем показан изгиб дистальной части в направлении влево и вправо;
фиг. 9С представляет вид по вертикали и спереди дистальной части ЧПЭхоКГ зонда с фиг. 9А, иллюстрирующий вращение дистальной части против часовой стрелки, по часовой стрелке, а также подачу дистальной части вперед и отведение назад;
фиг. 9D в аксонометрии изображает дистальную часть ЧПЭхоКГ зонда с фиг. 9А, причем показано увеличение и уменьшение углов во множестве плоскостей для ультразвукового преобразователя;
фиг. 10 в разрезе изображает дистальную часть рукояти и проксимальную часть гастроскопа ЧПЭхоКГ зонда, соответствующего варианту осуществления настоящего изобретения;
фиг. 11 в разрезе изображает дистальную часть гастроскопа ЧПЭхоКГ зонда, соответствующего варианту осуществления настоящего изобретения;
фиг. 12 изображает схему системы ЧПЭхоКГ зонда, соответствующего варианту осуществления настоящего изобретения;
фиг. 13 изображает схему системы ЧПЭхоКГ зонда, содержащего микроформирователь луча и соответствующего другому варианту осуществления настоящего изобретения;
фиг. 14 в аксонометрии изображает проксимальную часть рукояти ЧПЭхоКГ зонда, содержащего интерфейс консоли, и соответствующего варианту осуществления настоящего изобретения;
фиг. 15 в аксонометрии и частично прозрачном виде изображает модуль беспроводной связи ЧПЭхоКГ зонда, соответствующего варианту осуществления настоящего изобретения;
фиг. 16 изображает схему системы ЧПЭхоКГ зонда, содержащего модуль беспроводной связи и соответствующего варианту осуществления настоящего изобретения;
фиг. 17 изображает схему системы ЧПЭхоКГ зонда, содержащего модуль беспроводной связи и соответствующего другому варианту осуществления настоящего изобретения;
фиг. 18 изображает блок-схему осуществления способа дистанционного управления процедурой чреспищеводной эхокардиографии, соответствующего варианту осуществления настоящего изобретения;
фиг. 19 изображает блок-схему осуществления способа получения и беспроводной передачи ультразвукового изображения в консоль.
Осуществление изобретения
Для целей облегчения понимания принципов настоящего изобретения, данное описание будет привязано к вариантам осуществления, которые проиллюстрированы чертежами, а для описания чертежей будет использован определенный язык. Тем не менее следует понимать, что варианты осуществления не предполагают никакого ограничения объема изобретения. В полной мере предусмотрены и включены в настоящее изобретение любые изменения и дополнительная модификация описанных устройств, систем и способов, а также любое дополнительное применение принципов настоящего изобретения, какое обычно мог бы себе представить специалист, к которому настоящее изобретение имеет отношение. В частности, в полной мере предусмотрено, что функции, компоненты и/или этапы, описанные в отношении одного варианта осуществления, могут быть скомбинированы с функциями, компонентами и/или этапами, описанными в отношении других вариантов осуществления настоящего изобретения. Однако, ради краткости многочисленные повторения указанных комбинаций по отдельности описаны не будут.
На фиг. 1 и 2 изображен традиционный ЧПЭхоКГ зонд 10, содержащий гастроскоп 30, рукоять 20 и консольный интерфейсный кабель 70. В данном варианте осуществления гастроскоп 30, рукоять 20 и консольный интерфейсный кабель 70 соединены друг с другом не разборным образом. Рукоять 20 неразборно соединена с гастроскопом посредством неразборного соединения 55, а с консольным интерфейсным кабелем 70 посредством неразборного соединения 75. Другими словами, в конструкции ЧПЭхоКГ зонда 10 фиг. 1 и 2 не предусмотрено отделение гастроскопа 30 и консольного интерфейсного кабеля 70 от рукояти 20 и их обратное присоединение. Согласно некоторым вариантам осуществления, традиционный ЧПЭхоКГ зонд 10 может представлять собой единый узел, в котором гастроскоп 30 и консольный интерфейсный кабель 70 не разборным образом прикреплены к рукояти 20 в местах неразборных соединений 55, 75 посредством адгезивов, винтов или иных средств крепления, которые не могут быть без труда отсоединены врачом или пользователем.
Термин «неразборный» может в широком смысле относиться к способу соединения или крепления, который не рассчитан на регулярное разъединение и повторное соединение. Таким образом, хотя два соединенных элемента могут быть физически разъединены, настоящее описание может ссылаться на соединение или крепление, как на неразборное, когда не производится разъединение указанных элементов при обычном медицинском использовании устройства. Термины «соединение, соединен, соединенный, или соединенный с» использованы, чтобы в широком смысле указать на какую-либо комбинацию, крепление или соединение. В настоящем описании может быть сделана ссылка на два элемента как на соединенные даже в случае, когда они неразборно прикреплены друг к другу или целиком выполнены как единый узел. Термин «соединенный» в том смысле, в каком он используется в настоящем описании, предполагает виды непосредственного или опосредованного соединения или крепления, а также виды разъемного соединения или крепления. Два элемента могут быть названы соединенными друг с другом даже, если они не находятся в непосредственном контакте друг с другом, или между указанными элементами имеются два или более соединяющих элементов. Термины «съемный или отделяемый» могут быть использованы, чтобы указать на способ соединения или крепления, которые предусматривают возможность отделения и обратного крепления в процессе нормального использования устройства или системы, например, до, во время и после медицинской процедуры.
Гастроскоп 30 включает в себя продолговатый корпус 37, дистальную часть 39 и проксимальную часть 32. Продолговатый корпус 37 может быть гибким, чтобы его можно было направлять через пищевод пациента. Гастроскоп 30 содержит первый и второй тяговые тросы 31, 33, которые механически соединены с первым и вторым элементами 23, 25 управления движением, которые соединены с рукоятью 20. Такая конструкция может позволить врачу управлять движением дистальной части гастроскопа. Управление движением дистальной части 39 гастроскопа 30 может помочь врачу направлять гастроскоп 30 в организме пациента к нужному месту визуализации. Жесткая или фиксированная конструкция гастроскопа могла бы ранить пациента, и могла бы быть непригодна для ультразвуковой визуализации, что требует точного расположения и достаточного контакта с тканями пациента для получения ультразвуковых изображений. Таким образом, тяговые тросы 31, 33 и гибкие элементы помогают врачу при получении ультразвуковых изображений органов пациента. Благодаря тому, что первый и второй тяговые тросы 31, 33 механически соединены с первым и вторым элементами 23, 25 управления движением, врач, манипулируя первым и вторым элементами 23, 25 управления движением, может получать тактильную обратную связь от дистального конца 39 гастроскопа 30, когда дистальный конец 39 прижимается к стенкам пищевода.
Поскольку в традиционной конструкции ЧПЭхоКГ зонда производится манипуляция тяговыми тросами, которые проходят от конца гастроскопа к элементам управления движением, расположенным на рукояти, гастроскопы не могут быть отделены или отсоединены от рукояти в процессе обычного применения. Таким образом, в типичных конструкциях гастроскопы прикрепляют к рукояти неразборным образом. Однако таким конструкциям могут быть свойственны недостатки, подобные тем, о которых шла речь выше, такие как не вызванная необходимостью избыточность ЧПЭхоКГ зондов, и дорогостоящие и рискованные процедуры очистки.
На фиг. 3 изображено ультразвуковое устройство 110 системы 100 ультразвуковой визуализации, соответствующее одному варианту осуществления настоящего изобретения. Согласно изображенной конструкции, система ультразвуковой визуализации содержит ЧПЭхоКГ зонд 110. Согласно данному варианту осуществления, гастроскоп 130, содержащий проксимальную часть 132 и дистальную часть 139, изображен отсоединенным от рукояти 120. Гастроскоп 130 содержит наконечник 140 гастроскопа на своей дистальной части 139. Гастроскоп 130 на своей проксимальной части 132 содержит интерфейс 160 сопряжения гастроскопа, а рукоять 120 на своей дистальной части 129 содержит интерфейс 150 сопряжения рукояти. Гастроскоп 130 и рукоять 120 могут быть выполнены с возможностью разъемного соединения друг с другом через интерфейс 150 сопряжения рукояти и интерфейс 160 сопряжения гастроскопа. Согласно некоторым вариантам осуществления, гастроскоп 130 и рукоять 120 соединены друг с другом разъемным образом так, что пользователь может управлять движением дистальной части 139 гастроскопа 130 посредством одного или более органов управления, расположенных на рукояти, таким образом, что данные ультразвуковой визуализации и/или данные управления могут проходить от ультразвукового преобразователя гастроскопа 130 через интерфейс 160 сопряжения гастроскопа и интерфейс 150 сопряжения рукояти в консоль. Согласно некоторым вариантам осуществления, наконечник 140 гастроскопа содержит элемент формирования изображения, выполненный с возможностью получения данных визуализации, соединенных с анатомической структурой пациента, внутри которой расположен гастроскоп 130. Например, элемент формирования изображения может содержать один или несколько ультразвуковых преобразователей (например, элемент 142 на фиг. 11), выполненных с возможностью получения данных ультразвуковой визуализации. К примеру, элемент формирования изображения может представлять собой матрицу ультразвуковых преобразователей, содержащую один или более ультразвуковых преобразовательных элементов. К примеру, согласно некоторым вариантам осуществления изобретения, матрица ультразвуковых преобразователей может содержать от 2 до 1100 ультразвуковых преобразовательных элементов. Согласно некоторым вариантам осуществления, матрица ультразвуковых преобразователей содержит 64, 128, 512 или 1024 ультразвуковых преобразовательных элементов, или любое иное подходящее количество ультразвуковых преобразовательных элементов, как больше указанного, так и меньше указанного.
В том смысле, в каком он используется в данном или других вариантах осуществления, термин «рукоять» может относиться к конструкции, выполненной с возможностью захвата рукой, манипуляции или ручного управления врачом. Как будет более подробно рассмотрено ниже, рукоять может также быть выполнена с возможностью осуществления различных функций и операций, и может содержать электронные компоненты. К примеру, манипулирование дистальной частью 139 гастроскопа 130 может заключаться в манипулировании диском или иным органом управления рукояти 120, которые могут вызывать уборку или высвобождение одного или более тяговых тросов 131, 133, соединенных с дистальной частью гастроскопа. Например, путем уборки или высвобождения одного или более тяговых тросов можно управлять задним/передним изгибом и правым/левым изгибом дистальной части гастроскопа. Таким образом, хотя рукоять 120, изображенная на фиг. 3, содержит корпус или кожух, выполненный с возможностью захвата рукой или манипуляции врачом, в настоящем изобретении термин «рукоять» относится в широком смысле к части системы ЧПЭхоКГ зонда, которая может содержать различные элементы, например, электронные.
Хотя ультразвуковое устройство 110, которое рассматривается согласно фиг. 3 и других фигур настоящего изобретения, представляет собой ЧПЭхоКГ зонд, настоящее изобретение в рамках своего объема предлагает различные устройства и системы ультразвуковой визуализации, выполненные с возможностью получения ультразвуковых изображений различных частей тела пациента. Соответственно, ультразвуковое устройство 110 может представлять собой систему визуализации любого типа, подходящую для использования в различных полостях внутри тела пациента. Согласно некоторым вариантам осуществления изобретения, ультразвуковое устройство 110 может включать в себя системы, выполненные с возможностью проведения внутрисосудистых ультразвуковых исследований (IVUS, Intravascular UltraSound), внутрисосудистых ультразвуковых исследований переднего обзора (FL-IVUS, Forward Looking Intravascular UltraSound), внутрисосудистых фотоакустических исследований (IVPA, Intravascular PhotoAcoustic), внутрисердечной эхокардиографии (ICE, Intracardiac Echocardiography) и/или других подходящих видов визуализации.
Следует понимать, что ультразвуковое устройство 110 может быть выполнено с возможностью получения любых подходящих внутриполостных данных визуализации. Согласно некоторым вариантам осуществления, устройство 110 может содержать элемент формирования изображений любой подходящей разновидности, например, оптической визуализации, оптической когерентной томографии (OCT, Optical Coherence Tomography) и т.п. Согласно некоторым вариантам осуществления, устройство 110 может быть выполнено с возможностью получения любых подходящих внутриполостных данных с использованием датчика давления, датчика расхода, датчика температуры, оптического волокна, отражателя, зеркала, призмы, элемента абляции, радиочастотного электрода, проводника и/или комбинации указанных элементов. В общем, устройство 110 может содержать электронный, механический, оптический и/или акустический чувствительный элемент, для получения внутриполостных данных, связанных с полостью в теле пациента. Устройство 110 может быть выполнено такого размера и формы, такой конструкции и/или конфигурации, чтобы оно было пригодно для введения в полость тела пациента.
В некоторых иллюстрированных вариантах осуществления ультразвуковое устройство 110 представляет собой ЧПЭхоКГ зонд. В некоторых вариантах ультразвуковое устройство представляет собой катетер, направляющий катетер или проволочный направитель. Ультразвуковое устройство 110 может содержать гибкий продолговатый элемент 137. В том варианте, в каком это используется в настоящем изобретении, продолговатый элемент или гибкий продолговатый элемент представляет собой по меньшей мере любую тонкую, длинную, гибкую структуру, которая конструктивно рассчитана (например, по размеру и/или форме) для размещения в анатомической полости. К примеру, дистальная часть 139 гибкого продолговатого элемента 137 может быть размещена в просвете полости, в то время как проксимальная часть 132 гибкого продолговатого элемента 137 может быть размещена снаружи тела пациента. Гибкий продолговатый элемент 137 может иметь продольную ось. В некоторых случаях продольной осью может являться центральная продольная ось гибкого продолговатого элемента 137. Согласно некоторым вариантам осуществления, гибкий продолговатый элемент 137 может включать в себя один или более слоев полимера/пластика, выполненных из различных сортов нейлона, пебакса, полимерных композитов, полиимидов и/или тефлона. Согласно некоторым вариантам осуществления, гибкий продолговатый элемент 137 может включать в себя один или более слоев из плетеных металлических и/или полимерных нитей. Плетеный слой или плетеные слои могут быть сплетены плотно или рыхло в любой подходящей конфигурации, включая любое подходящее количество переплетений на единицу длины. Согласно некоторым вариантам осуществления, гибкий продолговатый элемент 137 может включать в себя один или более металлических и/или полимерных витков. Весь гибкий продолговатый элемент 137 или его часть могут иметь поперечное сечение любой подходящей геометрии (например, круглое, овальное, прямоугольное, квадратное, эллиптическое и т.п.) или сечение, не отвечающее определенной геометрической фигуре. К примеру, гибкий продолговатый элемент 137 может иметь в целом цилиндрический профиль с круглым поперечным сечением, которое определяет наружный диаметр гибкого продолговатого элемента 137. Например, наружный диаметр гибкого продолговатого элемента 137 может иметь любую подходящую величину для его размещения внутри анатомической полости 102, включая величины в диапазоне приблизительно от 0,3 мм до 26,7 мм, например, 1,0 мм, 2,3 мм, 2,7 мм, 3,0 мм, 8,3 мм, 10,0 мм, 11,3 мм, 17,0 мм, 20,0 мм и/или другие подходящие величины, как большие, так и меньшие.
Ультразвуковое устройство 110 может содержать (а может и не содержать) один или более просветов (каналов), проходящих по всей длине (или по части длины гибкого продолговатого элемента 137. Такой просвет в ультразвуковом устройстве 110 может быть предусмотрен конструктивно (т.е. могут быть заданы его размер и/или форма) для размещения и/или направления одного или более диагностических и/или терапевтических инструментов. Ультразвуковое устройство 110 содержит просвет (просветы), которые могут быть по центру или смещены относительно профиля поперечного сечения устройства 110. Согласно некоторым вариантам осуществления, ультразвуковое устройство 110 может быть использовано совместно с проволочным направителем. В общем, проволочный направитель представляет собой тонкую, длинную и гибкую структуру, которая конструктивно предусмотрена (т.е. заданы размер и/или форма) для размещения в анатомической полости. Во время диагностической и/или терапевтической процедуры специалист обычно вначале вводит проволочный направитель в анатомическую полость и перемещает проволочный направитель в требуемое место анатомической полости, например, в точку соседнюю с внутрисосудистой окклюзией. Проволочный направитель облегчает введение и позиционирование одного или более других диагностических и/или терапевтических инструментов, включая ультразвуковое устройство 110, в нужном месте организма. Например, ультразвуковое устройство 110 перемещается сквозь анатомическую полость по проволочному направителю. Согласно некоторым вариантам осуществления, просвет ультразвукового устройства 110 может следовать по всей длине гибкого продолговатого элемента 137. Согласно некоторым вариантам осуществления, ультразвуковое устройство не используют совместно с проволочным направителем, при этом из конструкции ультразвукового устройства 110 порт выхода/входа может быть исключен.
Анатомия может быть представлена любыми структурами, которые заполнены или окружены жидкостями - как естественными, так и искусственными структурами. Например, определенная анатомическая структура может находиться внутри тела пациента. Жидкость может протекать через анатомическую полость. В некоторых случаях ультразвуковое устройство 110 может быть названо чреспищеводным устройством. Анатомической структурой может служить полость рта, глотка, пищевод и/или желудок пациента. В некоторых случаях ультразвуковое устройство 110 может быть названо внутрисердечным или внутрисосудистым устройством. При различных вариантах осуществления такой анатомической структурой является артерия или вена сосудистой системы пациента, включая коронарные сосуды сердца, периферическую сосудистую сеть, сосуды нервной системы, почечную сосудистую систему, и/или любая иная анатомическая структура/полость внутри тела. В некоторых случаях анатомическая структура может быть извилистой. К примеру, устройство 110 может быть использовано для обследования любого количества мест организма и типов ткани, включая помимо других возможных органы такие, как печень, сердце, почки, желчный пузырь, поджелудочную железу, легкие, пищевод; протоки; кишечник; структуры нервной системы, включая мозг, дуральный мешок, спинной мозг и периферические нервы; мочевыводящие пути; а также клапаны внутри объема крови, камеры или другие части сердца, и/или иные системы организма. Дополнительно к естественным структурам, устройство 110 может быть использовано для обследования искусственных структур, таких как сердечные клапаны, стенты, шунты, фильтры и иные устройства.
На фиг. 4 изображена схема системы 100 ультразвуковой визуализации, соответствующей варианту осуществления настоящего изобретения. Согласно некоторым вариантам осуществления система ультразвуковой визуализации представляет собой систему чреспищеводной эхокардиографической визуализации. Согласно варианту осуществления, показанному на фиг. 4, гастроскоп 130 соединен с рукоятью 120 через интерфейс 155 зонда, а рукоять 120 соединена с консолью 180 через интерфейс 175 консоли. Интерфейс 155 зонда может представлять собой комбинацию интерфейса сопряжения гастроскопа и интерфейса сопряжения рукояти, в то время как интерфейс 175 консоли может включать в себя консольный интерфейсный кабель и разъем соединения с консолью, какие были описаны согласно фиг. 3. Гастроскоп 130 может получать данные ультразвуковой визуализации, передавать данные ультразвуковой визуализации в рукоять 120 через интерфейс 155 зонда, а рукоять 120 может передавать данные ультразвуковой визуализации в консоль 180 через интерфейс 175 консоли. Кроме того, гастроскоп 130 может получать данные управления от консоли 180 через рукоять 120 для управления различными аспектами ЧПЭхоКГ сканирования, например, данные одной или более последовательностей возбуждения матрицы ультразвуковых преобразователей, а также данные управления движением или изгибом дистальной части 139 гастроскопа 130.
Согласно некоторым вариантам осуществления изобретения, гастроскоп 130 передает данные ультразвуковой визуализации в консоль 180 через рукоять 120. Согласно некоторым вариантам осуществления, интерфейс 175 консоли может располагаться в проксимальной части рукояти 120, например, на проксимальном конце рукояти 120. Согласно некоторым вариантам осуществления, интерфейс 175 консоли может представлять собой по меньшей мере один из следующих интерфейсов: USB-интерфейс или интерфейс с подпружиненными штырями. Согласно другим вариантам, интерфейс 175 консоли может представлять собой кабель, жестко прикрепленный к рукояти 120. Как будет более подробно рассмотрено ниже, в некоторых вариантах осуществления рукоять 120 содержит электронные компоненты для модуляции или обработки данных ультразвуковой визуализации, передаваемых в консоль 180.
На фиг. 5А и 5В изображена рукоять 120 ЧПЭхоКГ зонда 110, соответствующая варианту осуществления настоящего изобретения. Рукоять, изображенная на фиг. 5А и 5В, может содержать подобные или идентичные компоненты, что и рукоять фиг. 3, такие как проксимальная часть 122, дистальная часть 129 и интерфейс 150 сопряжения. Интерфейс 150 сопряжения может представлять собой интерфейс с подпружиненными штырями, содержащий матрицу подпружиненных штырей и защелку 127, выполненную с возможностью съемного соединения с гастроскопом 130 фиг. 3. Рукоять 120 может также содержать один или более селекторов 125 команд пользователя, выполненных с возможностью приема команды пользователя и передачи сигнала команды пользователя. В различных вариантах осуществления рукоять 120 может содержать один, два, три, четыре или более селекторов 125 команд пользователя. Например, команда пользователя может заключаться в нажатии кнопки. Нажатие кнопки может быть преобразовано в сигнал, чтобы запустить протокол ультразвукового сканирования или чтобы управлять движением гастроскопа 130. Согласно другим вариантам осуществления, селекторами 125 команд пользователя могут служить электронные кнопки, диски, емкостные сенсоры, рычажки, тумблеры, круглые головки, джойстики и т.п.
На фиг. 5В представлен частично прозрачный вид рукояти 120 с фиг. 5А. Рукоять 120 может содержать различные электронные устройства, выполненные с возможностью управления одним или более аспектами получения чреспищеводной эхокардиограммы. Рукоять 120 с фиг. 5В содержит микроконтроллер 121, соединенный с интерфейсом 175 консоли в проксимальной части 122 рукояти 120, с интерфейсом 150 сопряжения рукояти в дистальной части 129 рукояти 120, и с селекторами 125 команд пользователя. Микроконтроллер 121 может принимать электрический сигнал, например, командный сигнал, от консоли через интерфейс 175 консоли, от селекторов 125 команд пользователя, или сигналы из обоих указанных мест. Микроконтроллер 121 может принимать и передавать электрический сигнал к соответствующим компонентам ЧПЭхоКГ зонда 110, таким как гастроскоп 130. Рукоять 120 также содержит источник 123 питания, выполненный с возможностью обеспечения энергией различных элементов ЧПЭхоКГ зонда 110. В варианте осуществления по фиг. 5В рукоять 120 содержит формирователь 128 луча, контроллер 126 сканирования, и сигнальный процессор 124 в дистальной части 129 рукояти 120. Формирователь 128 луча может быть выполнен с возможностью приема данных ультразвуковой визуализации от ультразвукового преобразователя, и обработки данных ультразвуковой визуализации с целью построения ультразвукового изображения. Сигнальный процессор 124 может быть выполнен с возможностью дополнительной обработки данных ультразвуковой визуализации, предназначенных для демонстрации врачу. Контроллер 126 сканирования может управлять различными аспектами процедуры ультразвуковой визуализации, выполняемой ультразвуковым преобразователем, такими, как частота, амплитуда импульсов, момент времени передачи импульса, момент времени приема эхо-сигнала, развитие изображения по линии сканирования и т.п.
Хотя формирователь 128 луча, сигнальный процессор 124 и контроллер 126 сканирования в варианте осуществления, представленном на фиг. 5 В, расположены в дистальной части 129 рукояти 120, допустимо, не выходя за границы объема настоящего изобретения, расположить любое из указанных устройств: формирователь 128 луча, сигнальный процессор 124 или контроллер 126 сканирования в иных областях ЧПЭхоКГ зонда 110, таких как гастроскоп 130 или проксимальная часть рукояти 120. В некоторых вариантах осуществления один или более из указанных компонентов может являться частью внешней консоли (например, консоли 180 фиг. 4). Согласно другим вариантам осуществления, рукоять 120 может быть соединена с консольным интерфейсным кабелем. А еще в иных вариантах осуществления, консольный интерфейсный кабель может быть неразборным образом прикреплен к рукояти 120, или выполнен как одно целое с рукоятью 120. В некоторых вариантах осуществления рукоять может содержать батарею, соединенную с источником 123 питания, и выполненную с возможностью обеспечения энергией одного или более электрических компонентов ЧПЭхоКГ зонда, например, микроконтроллера 121, контроллера 126 сканирования и гастроскопа 130.
На фиг. 6А и 6В в аксонометрии изображены интерфейс 160 сопряжения гастроскопа 130 и интерфейс 150 сопряжения рукояти 120 ЧПЭхоКГ зонда 110, соответствующие одному варианту осуществления настоящего изобретения. Как показано на фиг. 6А, интерфейс 160 сопряжения гастроскопа может быть расположен на проксимальной части 132 (на проксимальном конце) гастроскопа 130, и может содержать матрицу розеточных пружинных соединителей 162. Розеточные пружинные соединители 162 могут соответствовать матрице подпружиненных штырей 152 интерфейса сопряжения 150 рукояти, как показано на фиг. 6В. Когда гастроскоп соединен с рукоятью, может быть предусмотрена передача электрических сигналов от гастроскопа 130 к электрическим компонентам рукояти 120 и, наоборот, через интерфейс 150 сопряжения рукояти и интерфейс 160 сопряжения гастроскопа.
В настоящем описании термин «передача» может относиться к ситуации, когда электрический компонент направляет, отправляет по определенному маршруту или разрешает прохождение определенного электрического сигнала к другому компоненту устройства. Например, электрический провод может передавать электрический сигнал даже если электрический провод не содержит электроники, которая может исполнять команды или селективно направлять электрический сигнал к различным электрическим компонентам.
Хотя интерфейс 160 сопряжения гастроскопа и интерфейс 150 сопряжения рукояти варианта осуществления, представленного на фиг. 6А и 6В, включают в себя интерфейсы 162, 152 подпружиненных штырей, в настоящем изобретении предполагается любой разъемный интерфейс, который обеспечивает передачу данных между гастроскопом 130 и рукоятью 120 или консолью 180. Например, согласно некоторым вариантам осуществления, интерфейс 160 сопряжения гастроскопа и интерфейс 150 сопряжения рукояти представляют собой USB-интерфейс. В других вариантах интерфейс 160 сопряжения гастроскопа и интерфейс 150 сопряжения рукояти представляют собой несимметричные электрические соединители, штепсельные соединители (типа вилка/розетка) или любой иной подходящий интерфейс.
На фиг. 7 изображены рукоять 120 и гастроскоп 130, соответствующие фиг. 6А и 6В, в сопряженном состоянии. При такой конфигурации интерфейс 160 сопряжения гастроскопа соединен с интерфейсом 150 сопряжения рукояти, чтобы гастроскоп 130 был зафиксирован на рукояти 120, и у электрических сигналов была возможность проходить между гастроскопом 130 и рукоятью 120. Электрические сигналы, проходящие между рукоятью 120 и гастроскопом 130, могут включать в себя инструкции для управления движением гастроскопа 130 в теле пациента, данные ультразвуковой визуализации и иные сигналы. Связь рукояти 120 с гастроскопом 130 может включать в себя физическое соединение посредством защелки, такой как защелка 127, изображенная на фиг. 5А, или любой другой способ фиксации разъемных компонентов, например магнитное соединение, или посредством традиционного электрического соединения, такого как USB-интерфейс, штепсельный соединитель (типа вилка/розетка) и т.п. ЧПЭхоКГ зонды, содержащие съемные или модульные компоненты, могут устранить некоторую избыточность оборудования, которая требуется при использовании традиционных ЧПЭхоКГ зондов, представляющих собой единый узел. Например, ЧПЭхоКГ зонд 110, соответствующий варианту осуществления настоящего изобретения, может дать возможность врачу прикреплять к рукояти 120 ЧПЭхоКГ зонда 110 один из ряда гастроскопов 130. На практике врач может использовать разные гастроскопы 130, которые соответствуют различной анатомии и физиологии пациентов (например, гастроскопы различного диаметра и/или длины), а также различные типы визуализации, которую врач хочет осуществить. Поскольку одна и та же рукоять может соединяться с разными гастроскопами 130, врачу нет необходимости для каждого гастроскопа иметь отдельный законченный ЧПЭхоКГ зонд, содержащий рукоять и консольный интерфейсный кабель. Кроме того, ЧПЭхоКГ зонды 110, содержащие съемные компоненты, могут обладать преимуществами в отношении очистки устройств. Компоненты, для которых требуется один тип процесса очистки, например, гастроскоп 130, можно очищать отдельно от других компонентов, для которых не требуется такой же тип очистки. Например, рукоять 120, которая может быть повреждена процессом очистки, предназначенным для гастроскопа 130, можно очищать, используя процесс, который в большей степени соответствует ее конструкции и компонентам.
На фиг. 8 представлен частично прозрачный вид ЧПЭхоКГ зонда 110 фиг. 3, когда гастроскоп 130 отделен от рукояти 120. Гастроскоп 130 содержит мотор 135, который соединен с первым тяговым тросом 131 и вторым тяговым тросом 133, выполнен с возможностью приведения указанных тросов в действие. Каждый из тросов - первый тяговый трос 131 и второй тяговый трос 133 - может содержать ряд индивидуальных тросиков или нитей. Первый и второй тяговые тросы 131, 133 могут быть соединены с различными точками дистальной части 139 гастроскопа 130, так что, когда мотор 135 приводит в действие или производит уборку первого и/или второго тяговых тросов 131, 133, мотор может управлять движением дистальной части 139 гастроскопа 130 в различных направлениях. Например, как показано на фиги. 9А, уборка и выпуск первого тягового троса 131 может осуществлять изгиб дистальной части 139 гастроскопа 130 в направлении назад и вперед, в то время как уборка и выпуск второго тягового троса 133 может осуществлять изгиб дистальной части 139 гастроскопа 130 в направлении вправо и влево.
Размещение мотора 135 внутри гастроскопа 130 позволяет реализовать менее сложный интерфейс или менее сложную связь между гастроскопом 130 и рукоятью 120, и одновременно сохранить функциональность и маневренность гастроскопа 130. Если вспомнить фиг. 1 и 2, то в традиционном ЧПЭхоКГ зонде 10 элементы 23, 25 управления движением, предназначенные для приведения в действие тяговых тросов 31, 33, могли быть размещены в рукояти 20, что требует, чтобы тяговые тросы 31, 33 проходили от дистальной части гастроскопа 30 до ручек 23, 25 в рукояти 20. Такая схема не позволяла реализовать модульную конструкцию, как на фиг. 8, в которой врач может отсоединять гастроскоп 130 от рукояти 120 и снова соединять с рукоятью 120, сохраняя управление дистальной частью 139 гастроскопа 130, когда гастроскоп 130 соединен с рукоятью 120.
Наконечник 140 гастроскопа содержит корпус 141 наконечника, в котором размещен ультразвуковой преобразователь 142, а также соединительные провода 143 ультразвукового преобразователя, соединенные с ультразвуковым преобразователем 142 для передачи данных ультразвуковой визуализации в рукоять 120. Гастроскоп 130 также содержит первый тяговый трос 131 и второй тяговый трос 133, которые соединены с дистальной частью 139 гастроскопа 130, и проходят между рукоятью 120 и указанной дистальной частью 139.
Первый и второй тяговые тросы 31, 33 соединены соответственно с первым элементом 23 управления движением и вторым элементом 25 управления движением. Первый и второй элемент 23, 25 управления соединены с рукоятью 20, и соответствуют направлению движения или степени свободы дистальной части 39 гастроскопа 30. Например, первый элемент 23 управления движением может соответствовать изгибу дистальной части 39 гастроскопа 30 в направлении назад и вперед, в то время как второй элемент 25 управления движением может соответствовать изгибу дистальной части 39 гастроскопа 30 в направлении вправо и влево. Таким образом, манипулируя первым и вторым элементами 23, 25 управления движением, пользователь может управлять движением и ориентацией дистальной части 39 гастроскопа 30 внутри пищевода пациента.
Хотя гастроскоп 130, изображенный на фиг. 8, содержит мотор 135 для управления движением первого и второго тяговых тросов 131, 133, гастроскоп 130 может содержать другие механизмы и исполнительные органы для управления движением дистальной части 139 гастроскопа. Кроме того, хотя гастроскоп 130, изображенный на фиг. 8, содержит первый и второй тяговые тросы 131, 133, гастроскоп 130 может содержать дополнительные тяговые тросы, например, третий и четвертый тяговый трос. Как говорилось выше, каждый тяговый трос может содержать ряд индивидуальных тросиков или нитей, предназначенных для управления движением дистальной части 139 гастроскопа 130.
Фиг. 9A-9D изображают дистальную часть 139 гастроскопа 130 при различных режимах движения и изгиба. Фиг. 9А представляет вид сбоку дистальной части 139 гастроскопа 130 при различных режимах изгиба в заднем и переднем направлениях. Фиг. 9В представляет вид спереди дистальной части 139 гастроскопа 130 при различных режимах изгиба в направлениях вправо и влево. Изгиб в переднем/заднем направлении и направлении вправо/влево может быть осуществлен путем уборки и высвобождения (выпуска) одного или более тяговых тросов, соответствующих одному или более режимам движения. Как говорилось выше, врач может управлять изгибом дистальной части 139 гастроскопа 130 в направлении вперед или назад путем уборки или выпуска первого тягового троса 131. Поскольку первый тяговый трос 131 может содержать ряд индивидуальных тросиков, управление изгибом дистальной части 139 гастроскопа 130 в направлении вперед или назад может заключаться в уборке одного из индивидуальных тросиков первого тягового троса 131, при этом другой из индивидуальных тросиков первого тягового троса 131 может оставаться неподвижным.
Фиг. 9C-9D изображают дополнительные режимы движения дистальной части 139 гастроскопа 130 и ультразвукового преобразователя 142. Фиг. 9С изображает режимы физического движения, включая отвод назад, подачу вперед и вращение, которые могут быть получены за счет ручной манипуляции гастроскопом 130, например, путем вращения рукояти, чтобы повернуть гастроскоп 130 в пищеводе пациента. Врач может также подавать вперед или отводить назад дистальную часть 139 гастроскопа 130 в пищеводе пациента, подавая рукоять в сторону пищевода пациента или отводя рукоять от пищевода пациента. Фиг. 9D изображает электронные режимы отклонения или изменения углов излучения, соединенные с излучением ультразвуковой энергии преобразователем 142. Режимы изменения, изображенные на фиг. 9D, могут не требовать физической манипуляции дистальной частью гастроскопа, такой, как режимы движения, представленные на фиг. 9A-9D. Электронные режимы фиг. 9D могут быть реализованы путем управления одним или более электронными аспектами матрицы ультразвуковых преобразователей, например, временными параметрами последовательностей возбуждения и приема сигналов.
Согласно фиг. 9A-9D, управление изображенными различными режимами движения и изгиба дистальной части 139 гастроскопа 130 можно осуществлять посредством одного или более селекторов команд пользователя, находящихся на рукояти (например, 125а, 125b фиг. 8.). Например, согласно одному варианту осуществления, управление изгибом дистальной части 139 гастроскопа 130 в направлении вперед и назад осуществляется первым селектором 125а команд, в то время как управление изгибом влево и вправо осуществляется вторым селектором 125b команд. Вращением, подачей вперед и отводом назад дистальной части 139 можно управлять посредством вращения, подачи вперед и отвода назад вручную рукояти 120 ЧПЭхоКГ зонда 110. Настройку электронного отклонения и манипуляцию электронным отклонением или изменением углов излучения можно осуществлять посредством третьего селектора команд пользователя. Как говорилось выше, каждый селектор 125а, 125b команд может представлять собой одно из следующих устройств: электронную кнопку, диск, емкостной сенсор, рычажок, тумблер, круглую головку, джойстик и т.п. Согласно одному варианту осуществления, когда врач нажимает на электронную кнопку первого селектора 125а команд, рукоять 120 получает командный сигнал пользователя от селектора 125а, и передает данный управляющий сигнал в гастроскоп 130 через интерфейс 150 сопряжения рукояти и интерфейс 160 сопряжения гастроскопа для управления изгибом дистальной части 139 гастроскопа 130 в направлении назад и вперед.
На фиг. 10 в разрезе изображена дистальная часть 129 рукояти 120 и проксимальная часть 132 гастроскопа 130 ЧПЭхоКГ зонда 110, представленного на фиг. 3. Проксимальная часть 132 гастроскопа 130 содержит контроллер 138 датчика усилия и контроллер 134 мотора, соединенный с мотором 135. Контроллер 138 датчика усилия может быть соединен с датчиком 145 усилия (показан на фиг. 11), и выполнен с возможностью приема сигнала датчика усилия, и выполнения операции на основе указанного сигнала датчика усилия.
Например, когда к дистальной части 139 гастроскопа 130 приложено усилие, контроллер 138 датчика усилия может от датчика 145 усилия принять сигнал, содержащий величину обнаруженного усилия, и сравнить величину обнаруженного усилия с заданным порогом. Если величина обнаруженного усилия превышает заданный порог, то контроллер 138 датчика усилия может послать инструкции в контроллер 134 мотора, чтобы уменьшить скорость вращения или остановить вращение мотора, или реверсировать вращение мотора, чтобы реверсировать движение дистальной части 139 гастроскопа 130 с целью уменьшения или устранения усилия, приложенного со стороны дистальной части 139 гастроскопа 130 к пищеводу пациента. Такое построение может дать возможность врачу управлять движением дистальной части 139 гастроскопа 130, не прикладывая усилий, превышающих безопасный предел. Излишнее усилие, приложенное к стенке пищевода, могло бы травмировать пациента.
Гастроскоп, изображенный на фиг. 10, дополнительно содержит соединительные провода 143 ультразвукового преобразователя, соединенные с ультразвуковым преобразователем 142 и интерфейсом 160 сопряжения гастроскопа. Соединительные провода 143 ультразвукового преобразователя могут передавать данные ультразвуковой визуализации от ультразвукового преобразователя 142 к интерфейсу 160 сопряжения гастроскопа для дальнейшей их передачи в рукоять 120 и/или в консоль. Гастроскоп 130 также содержит соединительные провода 146 датчика усилия, проходящие между контроллером 138 датчика усилия и самим датчиком 145 усилия. Соединительные провода 146 датчика усилия могут быть выполнены с возможностью передачи данных датчика усилия к контроллеру 138 датчика усилия. Согласно другим вариантам, соединительные провода 146 датчика усилия могут быть соединены с контроллером 134 мотора, при этом контроллер 134 мотора выполнен с возможностью приема сигнала обнаруженного усилия от датчика 145 усилия с целью управления дистальной частью 139 гастроскопа 130.
На фиг. 11 в разрезе изображена дистальная часть 139 гастроскопа 130, показанного на фиг. 3. В данном варианте осуществления дистальная часть 139 гастроскопа 130 содержит наконечник 140 гастроскопа, расположенный вблизи дистального конца или на дистальном конце гастроскопа 130. Наконечник 140 гастроскопа содержит корпус 141 наконечника, образующий наружную часть наконечника. Наконечник 140 гастроскопа также содержит ультразвуковой преобразователь 142, который может представлять собой матрицу ультразвуковых преобразователей, и датчик 145 усилия, соединенный с корпусом 141 наконечника, и выполненный с возможностью определения усилия, приложенного к наконечнику 140 гастроскопа и/или к дистальной части 139 гастроскопа 130. Датчик 145 усилия может включать в себя гибкое основание, расположенное вокруг дистальной части 139 гастроскопа 130, или датчик усилия с гибкой электроникой. Наконечник 140 гастроскопа также содержит микроформирователь 144 луча, соединенный с матрицей 142 ультразвуковых преобразователей. Микроформирователь 144 луча может быть выполнен с возможностью обработки или модификации электрических сигналов, поступающих от матрицы ультразвуковых преобразователей, для использования при построении ультразвуковых изображений. Микроформирователь 144 луча может также быть использован в комбинации с соответствующим формирователем луча (128 фиг. 5В) в рукояти 120. При таком построении микроформирователь 144 луча может устранять некоторую избыточность и соединительные провода, необходимые для передачи необработанных данных ультразвуковой визуализации от ультразвукового преобразователя 142 к консоли. Использование микроформирователя 144 луча в гастроскопе 130 может также способствовать уменьшению сложности интерфейса сопряжения 160 гастроскопа и интерфейса сопряжения 150 рукояти, например, за счет сокращения количества подпружиненных штырей 152, 162, необходимых для передачи данных ультразвуковой визуализации.
Хотя некоторые варианты осуществления изобретения предусматривают использование микроформирователя 144 луча в сочетании с формирователем (128 фиг. 5В) луча в рукояти 120, границы объема настоящего изобретения допускают построение гастроскопа 130, содержащего формирователь луча, расположенный в гастроскопе 130. Таким образом, все формирование луча (диаграммы направленности) может происходить внутри гастроскопа 130, или, согласно другим вариантам осуществления, задача формирования луча может быть разделена между микроформирователем луча гастроскопа 130 и формирователем луча рукояти 120. Согласно некоторым вариантам осуществления, все формирование луча может происходить в рукояти 120. В иных вариантах гастроскоп 130 может не содержать микроформирователя луча.
На фиг. 12 изображена схема системы 100 визуализации для ЧПЭхоКГ, соответствующей одному варианту осуществления настоящего изобретения. Система 100 визуализации для ЧПЭхоКГ, соответствующая фиг. 12, может содержать компоненты, которые подобны или идентичны компонентам вариантов осуществления, показанных на фиг. 3-11. Как показано на фиг. 12, система 100 визуализации для ЧПЭхоКГ может включать в себя гастроскоп 130, содержащий корпус 141 наконечника, мотор 135, тяговые тросы 131, 133, ультразвуковой преобразователь 142, датчик 145 усилия и датчик 148 температуры. Указанные компоненты могут быть организованы аналогично конфигурациям, показанным на фиг. 3-11, или могут иметь немного другую конфигурацию.
Как показано на фиг. 12, микроконтроллер 121 принимает и передает множество электрических сигналов для выполнения множества функций. Микроконтроллер 121 может принимать команды от консоли 180 или от селекторов команд пользователя, таких как кнопки 125, соединенных с рукоятью 120. Микроконтроллер 121 может затем обрабатывать и транслировать указанные команды к соответствующим компонентам, таким как источник 123 питания, контроллер 126 сканирования и мотор 135. Микроконтроллер 121 может также принимать сигналы от множества компонентов, таких как датчик 145 усилия, мотор 135 и сигнальный процессор 124. Сигналы, принимаемые микроконтроллером 121, могут содержать информацию, такую как данные усилия, данные температуры, или данные положения мотора, которые могут быть обработаны микроконтроллером 121 и использованы в качестве обратной связи для управления и регулировки различных компонентов системы 100 визуализации для ЧПЭхоКГ.
Например, контроллер 126 сканирования может принять командный сигнал от микроконтроллера 121, чтобы начать выполнение последовательности сканирования, а также данные управления и сигналы синхронизации, относящиеся к последовательности сканирования, которая подлежит выполнению. Контроллер 126 сканирования может передать данные управления и сигналы синхронизации в формирователь 128 луча и сигнальный процессор 124 для управления различными аспектами получения ультразвукового изображения. Формирователь 128 луча может передать один или более сигналов возбуждения в ультразвуковой преобразователь 142, вынуждая ультразвуковой преобразователь 142 излучать ультразвуковую энергию в форме ультразвуковых волн в анатомическую структуру пациента. Указанные один или более сигналов возбуждения могут также содержать командный сигнал для измерения или регистрации эхо-сигналов от переданных ультразвуковых волн. Ультразвуковой преобразователь 142 может затем измерять эхо-сигналы и преобразовывать ультразвуковые эхо-сигналы в электрические сигналы, содержащие данные ультразвуковой визуализации, которые должны быть переданы в формирователь 128 луча. Формирователь 128 луча может затем выполнить обработку, модуляцию или формирование диаграммы направленности для данных ультразвукового изображения на основе критериев от контроллера 126 сканирования, и передать данные ультразвукового изображения, соответствующие сформированной диаграмме направленности, в сигнальный процессор 124 для дальнейшей обработки данных ультразвукового изображения. Сигнальный процессор 124 может затем передать обработанные данные ультразвукового изображения в микроконтроллер 121. По получении обработанных данных ультразвукового изображения от сигнального процессора 124 микроконтроллер 121 может направить обработанные данные ультразвукового изображения в консоль 180 через интерфейс консоли.
Согласно другому примеру, микроконтроллер 121 посылает сигнал управления питанием в источник 123 питания, чтобы подать напряжение или ток в мотор 135 с целью управления работой или выходной мощностью мотора 135. Мотор 135 может быть соединен с одним или более тяговыми тросами 131, 133, которые могут быть соединены с корпусом 141 наконечника гастроскопа. Когда мотор 135 вращается, чтобы привести в действие тяговые тросы 131, 133, датчик 145 усилия может обнаружить усилие, приложенное к части гастроскопа, например, к корпусу 141 наконечника, преобразовать обнаруженное усилие в электрический сигнал, и передать данный электрический сигнал в контроллер 138 датчика усилия. Электрический сигнал от датчика 145 усилия может содержать данные величины усилия, например, величины усилия, приложенного к датчику 145 усилия и/или к корпусу 141 наконечника. Контроллер 138 датчика усилия может выполнять ряд функций, включая сравнение данных величины усилия с пороговой величиной, а также передачу по меньшей мере одного командного сигнала и величины измеренного усилия в микроконтроллер 121.
Согласно некоторым вариантам осуществления, когда контроллер 138 датчика усилия получает сигнал измеренного усилия от датчика 145 усилия, указывающий на то, что усилие, приложенное к датчику 145 усилия, превышает пороговую величину, контроллер 138 передает командный сигнал в микроконтроллер 121, чтобы отрегулировать напряжение или ток, подаваемые в мотор 135 для регулирования выходной мощности мотора 135. Согласно другим вариантам, микроконтроллер 121 получает данные величины усилия от контроллера 138 датчика усилия, сравнивает измеренную величину усилия с пороговой величиной и посылает инструкцию в источник 123 питания для коррекции напряжения или тока, подаваемых в мотор 135, для регулирования выходной мощности мотора 135. Согласно еще другим вариантам, если датчик 145 усилия обнаруживает усилие, превышающее заданный порог, то контроллер 138 датчика усилия может передать электрический сигнал непосредственно в мотор 135 для регулирования выходной мощности мотора 135. В иных вариантах микроконтроллер 121 может передать инструкции в источник 123 питания, чтобы прекратить подачу питания в мотор135, чтобы мотор 135 прекратил перемещать дистальную часть 139 гастроскопа 130, или может дать инструкцию мотору 135 изменить направление вращения мотора 135, чтобы вернуть дистальную часть 139 гастроскопа 130 в исходное положение. Мотор 135 может также передавать данные положения мотора в микроконтроллер 121, чтобы дать возможность врачу или пользователю с упреждением управлять движением дистальной части 139 гастроскопа 130.
На фиг. 13 изображена схема системы ЧПЭхоКГ зонда, соответствующей другому варианту осуществления настоящего изобретения. На фиг. 13 изображены компоненты, аналогичные компонентам варианта, показанного на фиг. 12, и дополнительно показан микроформирователь 144 луча, расположенный внутри корпуса 141 наконечника гастроскопа и соединенный с контроллером 126 сканирования, с формирователем 128 луча и ультразвуковым преобразователем 142. Другими словами, работа ЧПЭхоКГ зонда фиг. 13 может быть подобна работе ЧПЭхоКГ зонда фиг. 12 с дополнением в виде микроформирователя 144 луча. Микроформирователь луча, представленный на фиг. 13, может быть выполнен с возможностью обработки или модификации необработанных данных ультразвукового изображения, получаемых и передаваемых ультразвуковым преобразователем 142. Как говорилось выше в отношении фиг. 11, микроформирователь 144 луча может действовать с целью уменьшения объема данных, передаваемых в рукоять через интерфейс 160 сопряжения гастроскопа и интерфейс 150 сопряжения рукояти. Микроформирователь 144 луча может также принимать данные управления, такие как сигналы синхронизации, от контроллера 126 сканирования для управления ультразвуковым преобразователем 142. Формирователь 128 луча рукояти 120 может выполнять дополнительную обработку данных ультразвуковой визуализации, прошедших микроформирователь, для подготовки указанных данных для отображения для врача.
В соответствии с другим аспектом настоящего изобретения, фиг. 14 изображает проксимальную часть 122 рукояти 120 ЧПЭхоКГзонда 110, отвечающую одному варианту осуществления настоящего изобретения. Проксимальная часть 122 содержит интерфейс 111 консоли, расположенный на проксимальном конце рукояти 120, и предназначенный для передачи данных в консоль. Интерфейс 111 консоли включает в себя интерфейс 114 в виде подпружиненных штырей, представляющий собой матрицу подпружиненных соединителей. Интерфейс консоли также включает в себя направляющий паз 116, предназначенный для того, чтобы направлять на место ответный соединитель. Интерфейс 114 в виде подпружиненных штырей может обеспечить возможность съемного соединения или крепления рукояти 120 и консольного интерфейсного кабеля. Хотя вариант осуществления фиг. 14 представляет собой интерфейс 114 в виде подпружиненных штырей, рукоять 120 может содержать другие виды сопряжения или средств соединения с консолью, например, USB-интерфейс, штепсельный соединитель и т.п. Отсоединяемый USB кабель, например, может проходить между рукоятью 120 и консолью, и давать возможность разъемного или разделяемого соединения кабеля с рукоятью 120, в отличие от кабеля с неразборным креплением, как в некоторых вариантах осуществления традиционных ЧПЭхоКГ зондов. Как будет рассмотрено ниже согласно фиг. 15, интерфейс консоли может быть выполнен с возможностью соединения с модулем беспроводной связи. Согласно другим вариантам, интерфейс консоли может быть выполнен с возможностью соединения с кабелем зарядного устройства для приема электропитания.
На фиг. 15 изображен модуль 190 беспроводной связи, соединенный с рукоятью ЧПЭхоКГ зонда, и соответствующий одному варианту осуществления настоящего изобретения. Модуль 190 беспроводной связи может содержать корпус 197 и первый интерфейс 195а сопряжения модуля, предназначенный для связи консоли с рукоятью. Согласно другим вариантам, модуль 190 беспроводной связи может быть расположен внутри рукояти, или может быть прикреплен неразборным образом к рукояти 120.
Дополнительно к корпусу 197 и первому интерфейсу 195а сопряжения модуля, модуль беспроводной связи фиг. 15 содержит радиомодуль 191, микроконтроллер 192, батарею 193, диспетчер 199 электропитания, элемент беспроводной связи, содержащий антенну 194, и второй интерфейс 195b сопряжения модуля. Модуль 190 беспроводной связи может быть соединен с рукоятью через первый интерфейс 195а сопряжения модуля. Согласно некоторым вариантам осуществления, первый интерфейс 195а сопряжения модуля представляет собой интерфейс в виде подпружиненных штырей, предназначенный для связи с интерфейсом консоли рукояти. Согласно другим вариантам осуществления, первый интерфейс 195а сопряжения модуля может представлять собой USB интерфейс, или иные подходящие средства связи с рукоятью.
Радиомодуль 191 может быть соединен с антенной 194 и выполнен с возможностью приема радиосигнала от консоли. Согласно некоторым вариантам осуществления, радиосигнал может содержать команды или инструкции от консоли для выполнения одной или более функций, например, ЧПЭхоКГ сканирования. Радиомодуль 191 может также быть соединен с микроконтроллером 192 для передачи команд или инструкций различным компонентам рукояти 120 и/или гастроскопу 130 через интерфейс консоли. К примеру, согласно некоторым вариантам осуществления, радиомодуль 191 может принимать инструкции от консоли 180 для управления движением дистальной части 139 гастроскопа 130. Модуль 190 беспроводной связи может передавать инструкции контроллеру в рукояти 120. Контроллер затем может дать команду диспетчеру 199 электропитания для подачи питания (например, напряжения или тока) в мотор в гастроскопе или в рукояти для приведения в действие тягового троса, предназначенного для управления движением дистальной части гастроскопа. Согласно некоторым вариантам осуществления, микроконтроллер 192 может передавать инструкции непосредственно одному или более компонентам гастроскопа, например, мотору или контроллеру мотора. Согласно некоторым вариантам осуществления, модуль 190 беспроводной связи может также содержать интерфейс 198 пользователя и звуковой индикатор 196, выполненный с возможностью индикации состояния или функции модуля 190 беспроводной связи. К примеру, в некоторых вариантах звуковой индикатор может содержать громкоговоритель, и может издавать слышимый шум, например, зуммерный сигнал, чтобы указать, что модуль 190 беспроводной связи правильно присоединен к рукояти.
Различные компоненты модуля 190 беспроводной связи могут получать питание от батареи 193. Батарея 193 может быть соединена с диспетчером 199 электропитания, выполненным с возможностью распределения питания от батареи 193 по другим компонентам модуля 190 беспроводной связи. Согласно некоторым вариантам осуществления, батарея 193 модуля 190 беспроводной связи может также снабжать питанием различные электрические компоненты рукояти и/или гастроскопа. К примеру, мотор гастроскопа может получать питание от батареи 193 модуля 190 беспроводной связи. В варианте осуществления, показанном на фиг. 15, модуль 190 беспроводной связи может содержать второй интерфейс 195b сопряжения модуля в проксимальной части модуля 190 беспроводной связи. Второй интерфейс 195b сопряжения модуля может быть выполнен с возможностью соединения с консольным интерфейсным кабелем или с кабелем зарядного устройства. Таким образом, ЧПЭхоКГ зонд, соединенный с модулем 190 беспроводной связи фиг. 15, может работать либо через беспроводное соединение, либо через проводное соединение с консолью посредством консольного интерфейсного кабеля.
На фиг. 16 и 17 изображены схемы вариантов осуществления модуля 190 беспроводной связи. Модуль 190 беспроводной связи фиг. 16 может содержать компоненты аналогичные или идентичные компонентам, изображенным на фиг. 15, например, радиомодуль 191, микроконтроллер 192а и батарею 193. Батарея 193 может быть соединена с диспетчером 199 электропитания. Диспетчер 199 электропитания может быть выполнен с возможностью распределения питания от батареи 193 по другим компонентам модуля беспроводной связи, таким как микроконтроллер 192а и радиомодуль 191. В варианте осуществления, изображенном на фиг. 16, модуль 190 беспроводной связи может содержать корпус 197, в котором размещены электрические компоненты модуля 190 беспроводной связи. Согласно другим вариантам осуществления, таким, как вариант на фиг. 17, часть модуля 290 беспроводной связи может не содержать своего корпуса, и может быть размещена внутри рукояти 220 ЧПЭхоКГ зонда. В варианте осуществления по фиг. 17 рукоять 220 может содержать интерфейс 211 консоли, а не первый или второй интерфейс сопряжения модуля. Рукоять 220 может быть выполнена с возможностью беспроводного управления со стороны консоли 180, или посредством проводного соединения, содержащего консольный интерфейсный кабель, который соединен с интерфейсом 211 консоли на рукояти 220 (например, фиг. 14) и с консолью 180.
Согласно фиг. 16, радиомодуль 191 может принимать антенной 194 радиосигнал от консоли 180. Данный радиосигнал может содержать, например, командный сигнал и рабочие инструкции. Радиомодуль 191 может преобразовывать радиосигнал в электрический сигнал для передачи в микроконтроллер 192а. По получении электрического сигнала микроконтроллер 192а модуля беспроводной связи направляет указанный электрический сигнал к соответствующему компоненту, например, к рукояти 120. Батарея 193 может снабжать электропитанием радиомодуль и микроконтроллеры 192а, 192b через диспетчера 199 электропитания. Диспетчер 199 электропитания может быть выполнен с возможностью раздачи соответствующего количества электроэнергии каждому из компонентов модуля 190 беспроводной связи. С другой стороны, внешнее зарядное устройство может обеспечивать питанием различные компоненты модуля 190 беспроводной связи через диспетчера 199 электропитания. В некоторых вариантах внешнее зарядное устройство может быть выполнено с возможностью заряда батареи 193 при одновременной подаче электропитания компонентам модуля 190 беспроводной связи. Согласно другим вариантам, внешнее зарядное устройство только подает питание на батарею 193 и заряжает последнюю, а батарея 193 обеспечивает электропитание компонентов модуля беспроводной связи. Согласно еще другим вариантам осуществления, батарея 193 может обеспечивать питанием компоненты других частей системы ЧПЭхоКГ зонда, например, компоненты рукояти 120 и гастроскопа 130. Согласно некоторым вариантам осуществления, батарея 193 модуля 190 беспроводной связи обеспечивает все электропитание необходимое для работы системы ЧПЭхоКГ зонда.
Интерфейс 198 пользователя, который может включать в себя один или более селекторов команд пользователя, например, кнопки, диски, круглые головки, тумблеры, рычажки, джойстики, сенсорные переключатели и т.п., может быть соединен с корпусом модуля 190 беспроводной связи, и может быть выполнен с возможностью приема команды от пользователя. Согласно некоторым вариантам осуществления, пользователь может управлять одним или более аспектами работы модуля 190 беспроводной связи и/или ЧПЭхоКГ зонда 110 путем манипулирования интерфейсом 198 пользователя (например, нажимая на кнопку). Интерфейс 198 пользователя затем посылает командный сигнал пользователя в микроконтроллер 192b. Микроконтроллер 192b выполнен с возможностью приема сигнала команды пользователя и передачи сигнала команды пользователя к соответствующему компоненту, например, к диспетчеру 199 электропитания или микроконтроллеру 192а. Например, интерфейс 198 пользователя может быть выполнен с возможностью приема сигнала команды от пользователя для выключения одного или более компонентов модуля 190 беспроводной связи. Согласно другим вариантам, интерфейс 198 пользователя может быть выполнен с возможностью управления одним или более аспектами сканирования или работы ЧПЭхоКГ зонда, или движением дистальной части 139 гастроскопа 130.
Согласно одному варианту осуществления, микроконтроллер 192а модуля 190 беспроводной связи может принимать данные ультразвукового изображения от рукояти 120. Микроконтроллер 192а может направить данные ультразвукового изображения в радиомодуль 191, который затем посредством антенны 194 беспроводным образом передаст данные ультразвукового изображения в консоль 180. Радиомодуль 191 может быть выполнен с возможностью преобразования данных ультразвукового изображения, переданных микроконтроллером 192а, из электрического сигнала в радиосигнал.
На фиг. 17 изображена часть модуля 290 беспроводной связи рукояти 220, которая может включать в себя компоненты аналогичные или идентичные компонентам модуля беспроводной связи фиг. 16. К примеру, часть модуля 290 беспроводной связи содержит радиомодуль 291, содержащий антенну 194, микроконтроллер, батарею и диспетчер электропитания, микроконтроллер, интерфейс консоли и интерфейс 298 пользователя. В этом отношении, часть модуля 290 беспроводной связи рукояти 220 может быть выполнена с возможностью выполнения аналогичных или идентичных функций, как это было описано в отношении варианта, изображенного на фиг. 16. В варианте осуществления по фиг. 17, часть модуля 290 беспроводной связи может быть размещена внутри рукояти 220, а не выполнена в виде отдельного блока или приставки. Другими словами, рукоять 220 содержит часть модуля 290 беспроводной связи и соответствующие компоненты. Таким образом, как было описано выше, часть модуля 290 беспроводной связи, соответствующая варианту осуществления, изображенному на фиг. 17, не содержит отдельного корпуса, или первого или второго интерфейса модуля.
На фиг. 18 изображена блок-схема одного варианта осуществления способа 300 для беспроводного управления гастроскопом ЧПЭхоКГ зонда. Согласно некоторым вариантам осуществления изобретения, этапы выполнения способа 300 могут быть реализованы посредством ЧПЭхоКГ зонда и соответствующих компонентов, изображенных на фиг. 3-17. Следует понимать, что определенные этапы осуществления способа 300 могут быть выполнены в другом порядке, нежели тот, какой показан на фиг. 18; дополнительные этапы могут быть предусмотрены до, во время и после определенных этапов; и/или некоторые из описанных этапов могут быть заменены или исключены в иных вариантах осуществления изобретения.
На этапе 310 ЧПЭхоКГ зонд, содержащий модуль беспроводной связи, принимает беспроводной командный сигнал от консоли. Командный сигнал может содержать инструкции для перемещения наконечника гастроскопа. Командный сигнал может быть беспроводным образом принят радиомодулем модуля беспроводной связи. На этапе 320 радиомодуль передает командный сигнал в контроллер. На этапе 330, контроллер, получив командный сигнал, подает напряжение на исполнительный орган, такой как мотор, чтобы привести исполнительный орган в действие. Подача напряжения контроллером на исполнительный орган может включать в себя инструкцию для источника питания - подать питание на исполнительный орган. На этапе 340 исполнительный орган совершает действие, чтобы втянуть тяговый трос, соединенный с наконечником гастроскопа или дистальной частью гастроскопа с целью перемещения или отклонения дистальной части.
Когда наконечник гастроскопа или дистальная часть гастроскопа движется или отклоняется, наконечник гастроскопа может прикладывать усилие к пищеводу пациента, и наоборот. На этапе 350 датчик усилия в наконечнике гастроскопа измеряет усилие, приложенное к наконечнику. На этапе 360 датчик усилия передает сигнал обнаружения усилия, который может содержать величину усилия, приложенного к наконечнику гастроскопа, в контроллер датчика усилия, соединенный с исполнительным органом и модулем беспроводной связи. На этапе 365 контроллер датчика усилия сравнивает измеренную величину усилия с заданным порогом. На этапе 370, если измеренное усилие превышает порог, то контроллер датчика усилия посылает мотору инструкцию отрегулировать выходную мощность мотора или прекратить работу мотора. Согласно некоторым вариантам осуществления, этап передачи мотору инструкции отрегулировать выходную мощность мотора или прекратить работу мотора может содержать инструкцию источнику питания уменьшить напряжение, подаваемое на мотор. В некоторых вариантах, если измеренное усилие превышает порог, то контроллер датчика усилия может послать мотору инструкцию реверсировать направление вращения, чтобы вернуть наконечник гастроскопа в предыдущее положение внутри пищевода пациента.
На этапе 380, когда контроллер датчика усилия определяет, что измеренное усилие превышает установленный порог, контроллер датчика усилия также передает в консоль сигнал превышения усилия. Эта передача может быть выполнена беспроводным образом посредством модуля беспроводной связи. На этапе 390, когда консоль получает сигнал превышения усилия, консоль активирует индикатор обнаружения усилия, чтобы указать врачу или пользователю, что обнаруженное усилие превышает установленную пороговую величину. Таким образом врач или пользователь могут быть поставлены в известность, что к пищеводу приложено слишком большое усилие, и что мотор может прекратить движение наконечника гастроскопа внутри пищевода пациента. Такая обратная связь может быть полезной для врача, который управляет ЧПЭхоКГ зондом по беспроводному каналу связи. Не имея такой обратной связи, врач мог бы столкнуться с трудностями при маневрировании дистальной частью гастроскопа внутри пищевода пациента. Согласно некоторым вариантам осуществления изобретения, индикатор обнаружения усилия может представлять собой световой сигнализатор, иконку на экране, предупреждающий звук или сочетание указанных средств сигнализации.
На фиг. 19 изображена блок-схема одного варианта осуществления способа 400 беспроводной передачи данных ультразвуковой визуализации в консоль. Согласно некоторым вариантам осуществления, этапы реализации способа 400 могут быть выполнены посредством ЧПЭхоКГ зонда и соответствующих компонентов, изображенных на фиг. 3-11. Следует понимать, что этапы способа 400 можно выполнять в ином порядке нежели тот, который показан на фиг. 19; дополнительные этапы могут быть предусмотрены до, во время и после определенных этапов; и/или некоторые из описанных этапов могут быть заменены или исключены в иных вариантах осуществления изобретения.
На этапе 410 ультразвуковой преобразователь может получить данные ультразвуковой визуализации путем излучения ультразвуковой энергии в форме ультразвуковых волн в теле пациента. Ультразвуковой преобразователь обнаруживает отраженные ультразвуковые волны или эхо-сигналы, и преобразует отраженные ультразвуковые волны в электрические сигналы, содержащие данные ультразвукового изображения. На этапе 420 ультразвуковой преобразователь передает данные ультразвукового изображения в микроформирователь луча, который может быть аналогичен или идентичен микроформирователю 144, показанному на фиг. 11. Указанный микроформирователь принимает, обрабатывает данные ультразвукового изображения, и на этапе 430 обработанные в микроформирователе данные ультразвукового изображения передаются в формирователь луча. В некоторых вариантах осуществления микроформирователь луча расположен внутри гастроскопа, а формирователь луча расположен в рукояти. Согласно другим вариантам осуществления, формирователь луча может быть расположен в консоли. Формирователь луча принимает частично обработанные данные ультразвукового изображения, выполняет дополнительную обработку (или формирование луча) данных ультразвуковой визуализации, которые должны быть выведены на дисплей для врача. На этапе 440 данные ультразвукового изображения, прошедшие формирование луча, передаются в сигнальный процессор, выполненный с возможностью дальнейшей обработки данных ультразвукового изображения, прошедших формирование луча, для создания ультразвукового изображения, подлежащего выводу на дисплей для врача. Согласно некоторым вариантам осуществления изобретения, обработка данных ультразвукового изображения, выполняемая микроформирователем луча, формирователем луча и сигнальным процессором, может сократить объем данных, который должен быть передан в консоль. На этапе 450 сигнальный процессор передает обработанные данные ультразвукового изображения в модуль беспроводной связи, и на этапе 460 модуль беспроводной связи принимает и беспроводным образом передает обработанные данные ультразвукового изображения в консоль.
Специалистам в данной области должно быть понятно, что рассмотренные выше устройство, системы и способы могут быть видоизменены различным образом. Соответственно, рядовые специалисты должны понимать, что варианты осуществления, которые охватывает настоящее описание, не ограничены приведенными конкретными примерами. В этом отношении, хотя были представлены и описаны иллюстрирующие варианты, предполагается возможность внесения в вышеописанное изобретение широкого ряда модификаций, изменений и замен. Следует понимать, что такие изменения можно сделать в вышеописанном изобретении, не выходя за границы его идеи и объема. Соответственно, целесообразно прилагаемую формулу изобретения толковать в широком смысле в соответствии с настоящим описанием.
| название | год | авторы | номер документа |
|---|---|---|---|
| ОБЛЕГЧЕННЫЙ БЕСПРОВОДНОЙ УЛЬТРАЗВУКОВОЙ ДАТЧИК | 2008 |
|
RU2502470C2 |
| ИНТЕЛЛЕКТУАЛЬНАЯ УЛЬТРАЗВУКОВАЯ СИСТЕМА | 2018 |
|
RU2759235C2 |
| УПРАВЛЯЕМЫЙ МИКРОМАНИПУЛЯТОРОМ ЛОКАЛЬНЫЙ ВИД С НЕПОДВИЖНЫМ ОБЩИМ ВИДОМ | 2013 |
|
RU2653836C2 |
| УЛЬТРАЗВУКОВАЯ ДИАГНОСТИКА АНАТОМИЧЕСКИХ ОСОБЕННОСТЕЙ | 2018 |
|
RU2778840C2 |
| БЛОК УПРАВЛЕНИЯ УЛЬТРАЗВУКОВЫМИ ИССЛЕДОВАНИЯМИ | 2019 |
|
RU2800255C2 |
| Определение и калибровка длины иглы для системы наведения иглы | 2012 |
|
RU2609203C2 |
| УЛЬТРАЗВУКОВОЕ УСТРОЙСТВО ДЛЯ ТЕРАПИИ С ПРИМЕНЕНИЕМ СОНОТРОМБОЛИЗИСА | 2015 |
|
RU2711338C2 |
| СПОСОБ И УСТРОЙСТВО ДЛЯ ИНТЕРАКТИВНОГО ОТОБРАЖЕНИЯ ТРЕХМЕРНЫХ УЛЬТРАЗВУКОВЫХ ИЗОБРАЖЕНИЙ | 2012 |
|
RU2639026C2 |
| КАБЕЛЬ БЕСПРОВОДНОГО УЛЬТРАЗВУКОВОГО ЗОНДА | 2008 |
|
RU2474386C2 |
| АВТОМАТИЗИРОВАННАЯ РАЗВЕРТКА И ЭКСПОРТ ДВУМЕРНЫХ УЛЬТРАЗВУКОВЫХ ИЗОБРАЖЕНИЙ ТРЕХМЕРНЫХ ОБЪЕМОВ | 2011 |
|
RU2577938C2 |
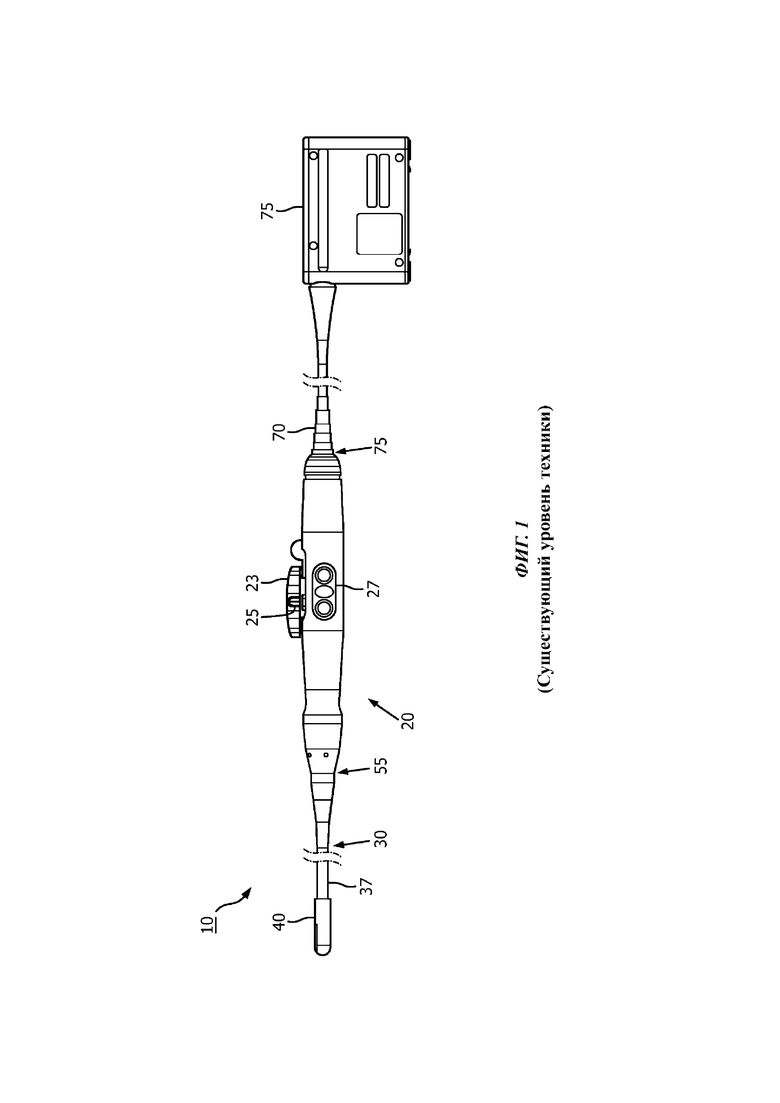
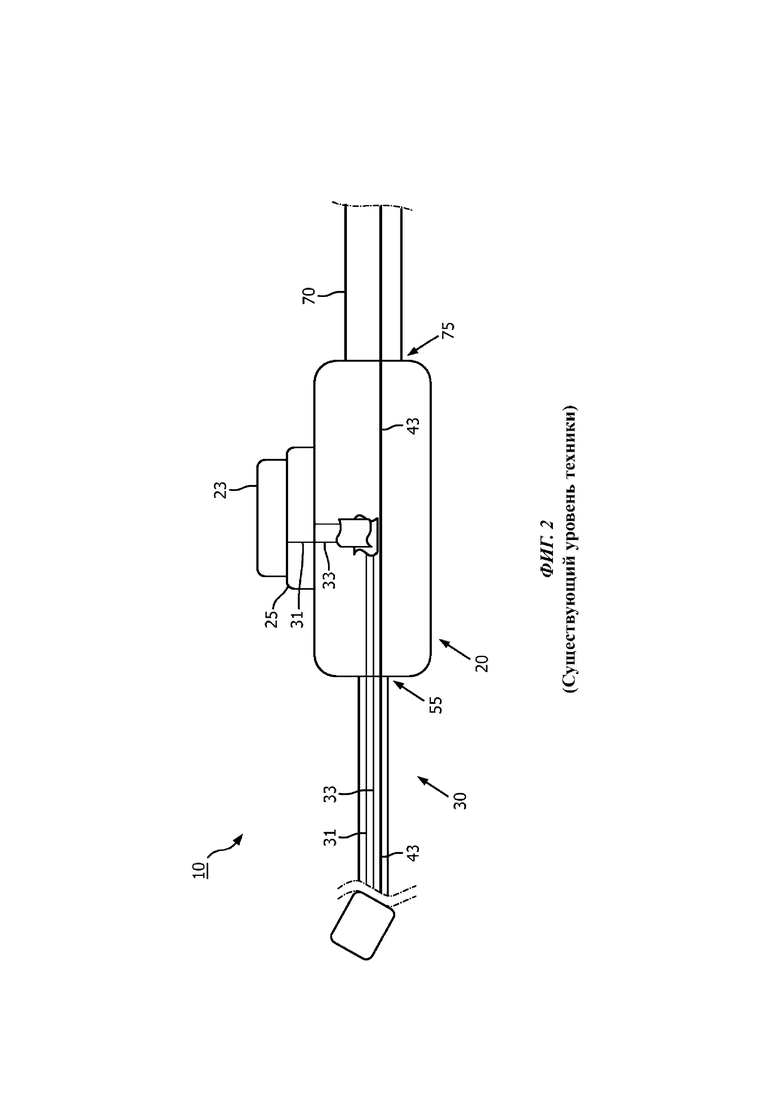
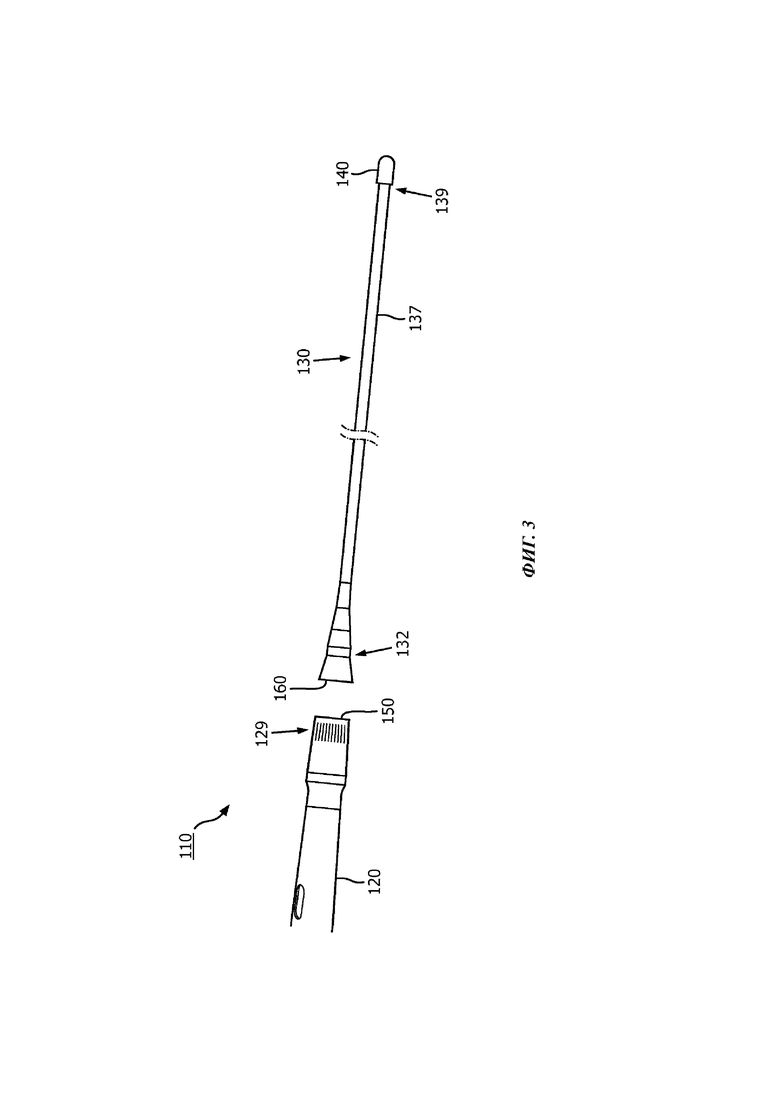
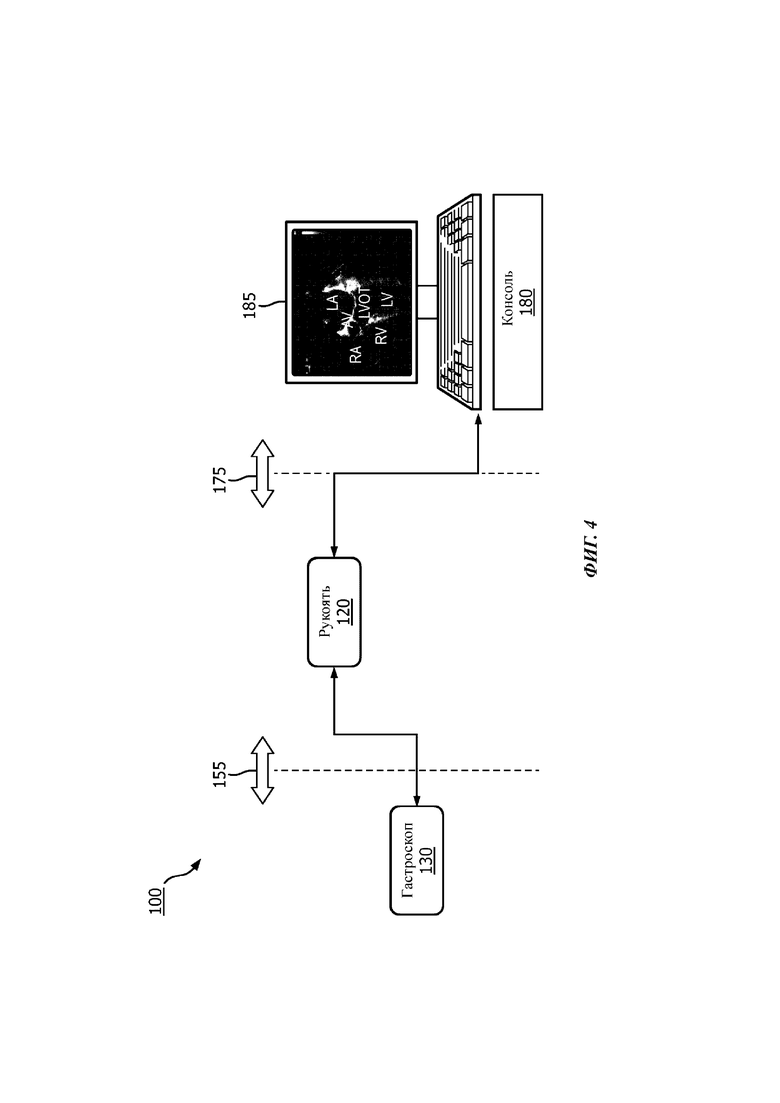
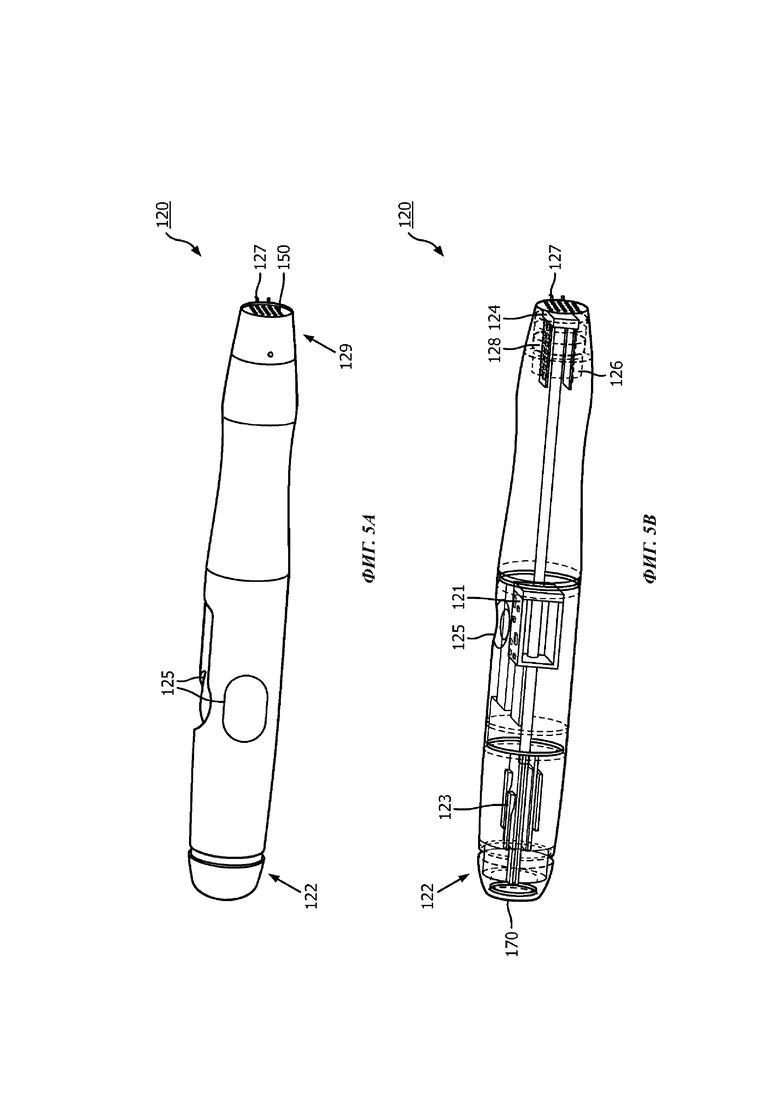
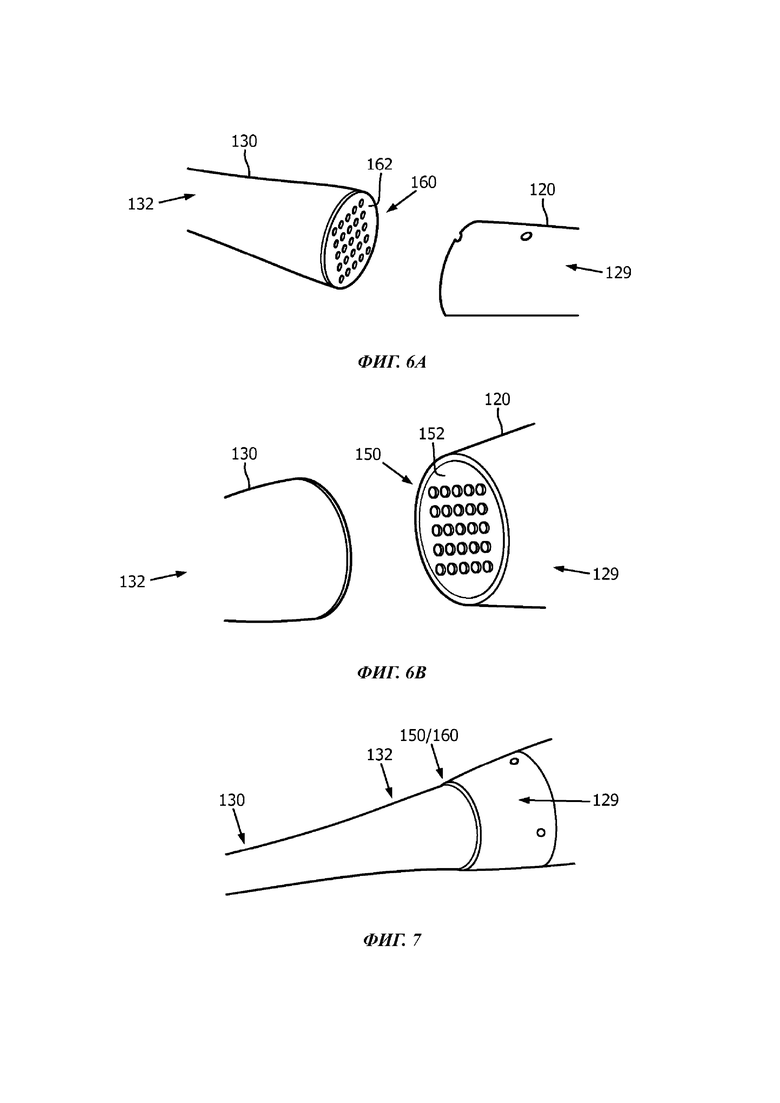
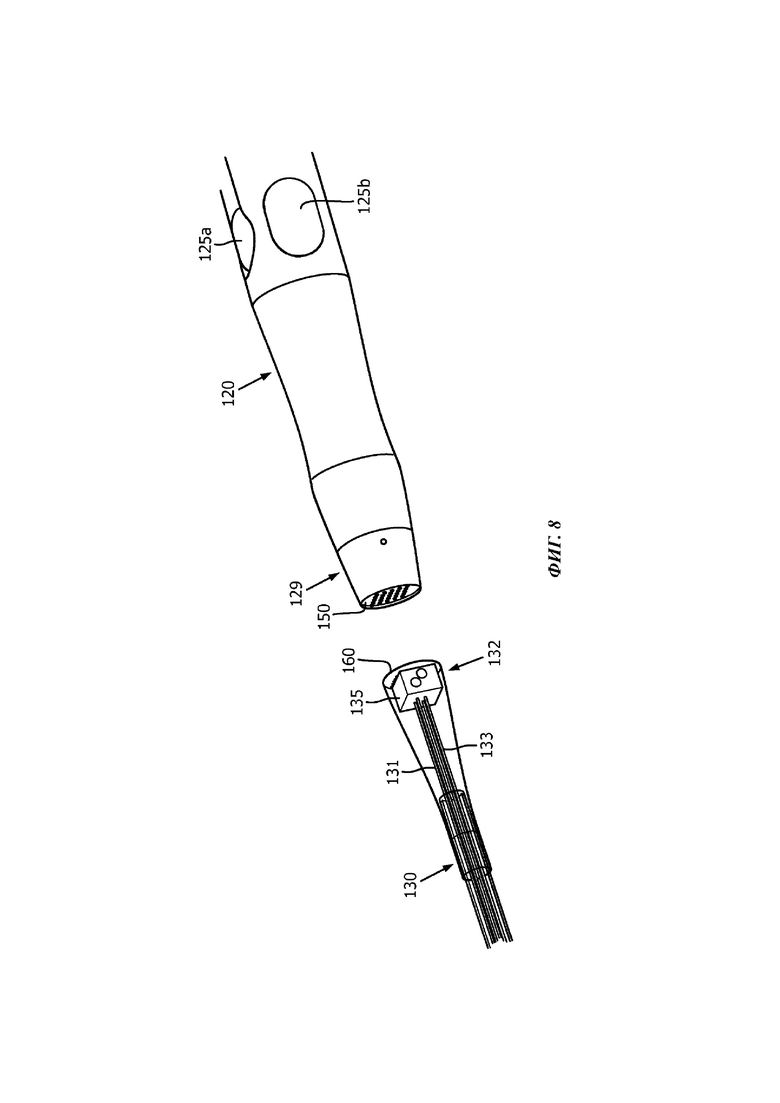

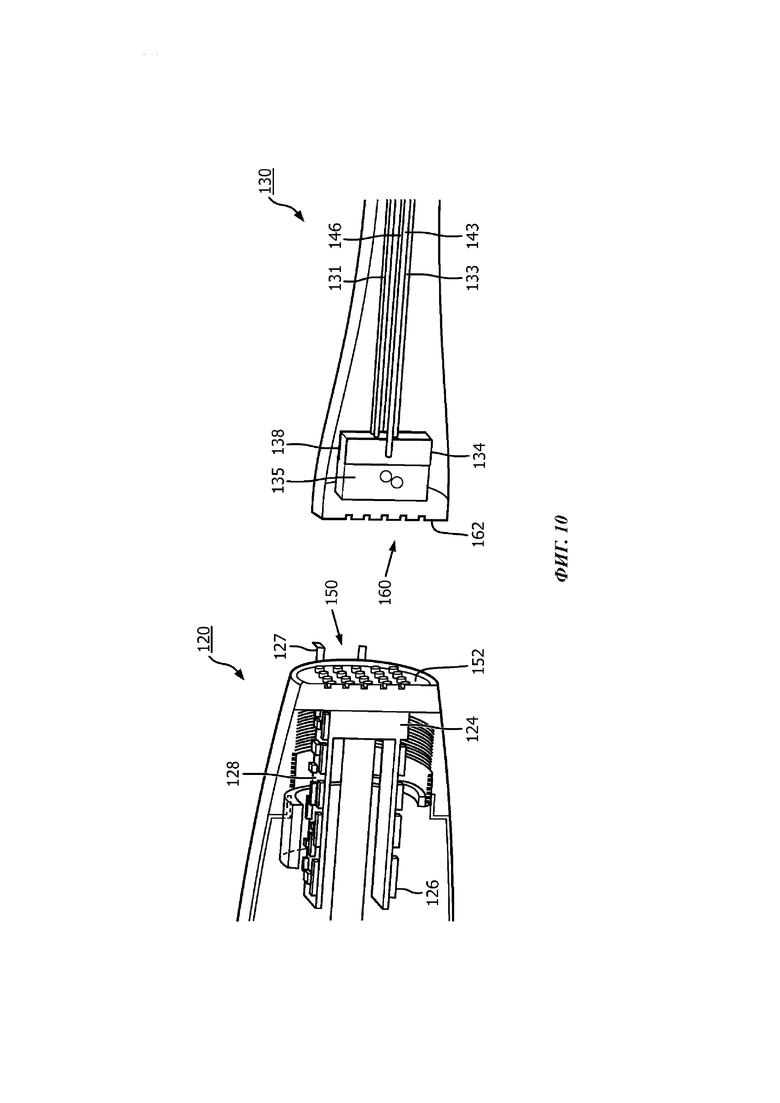

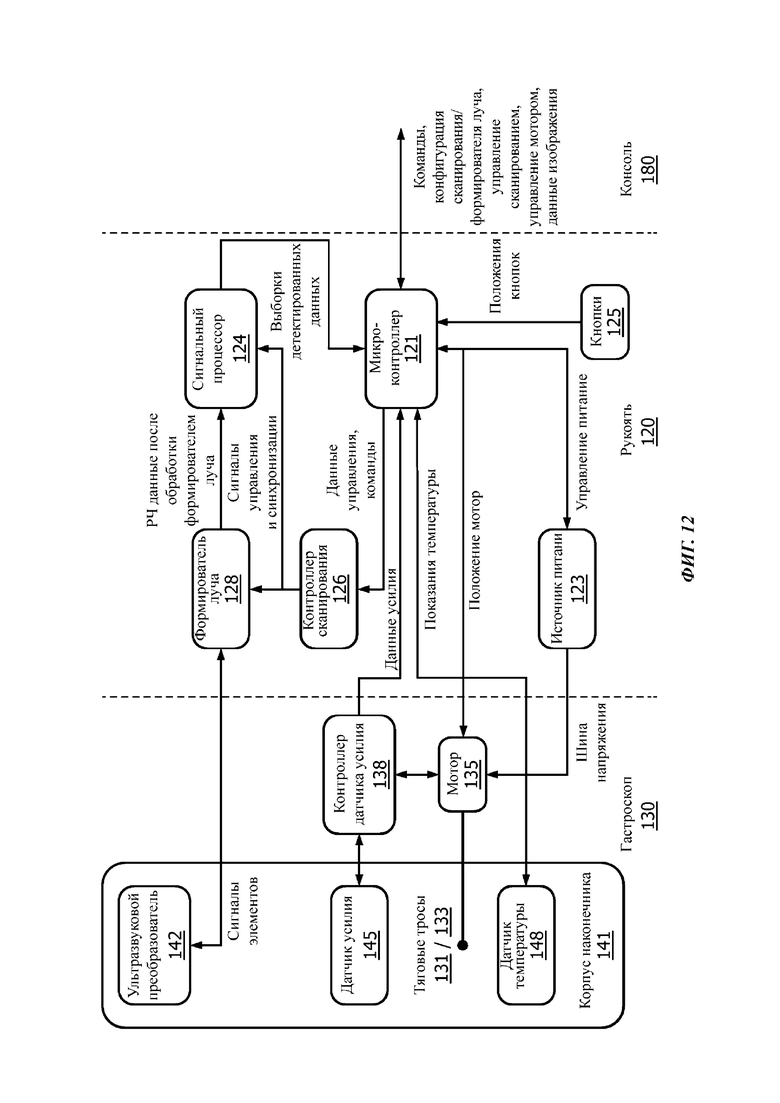
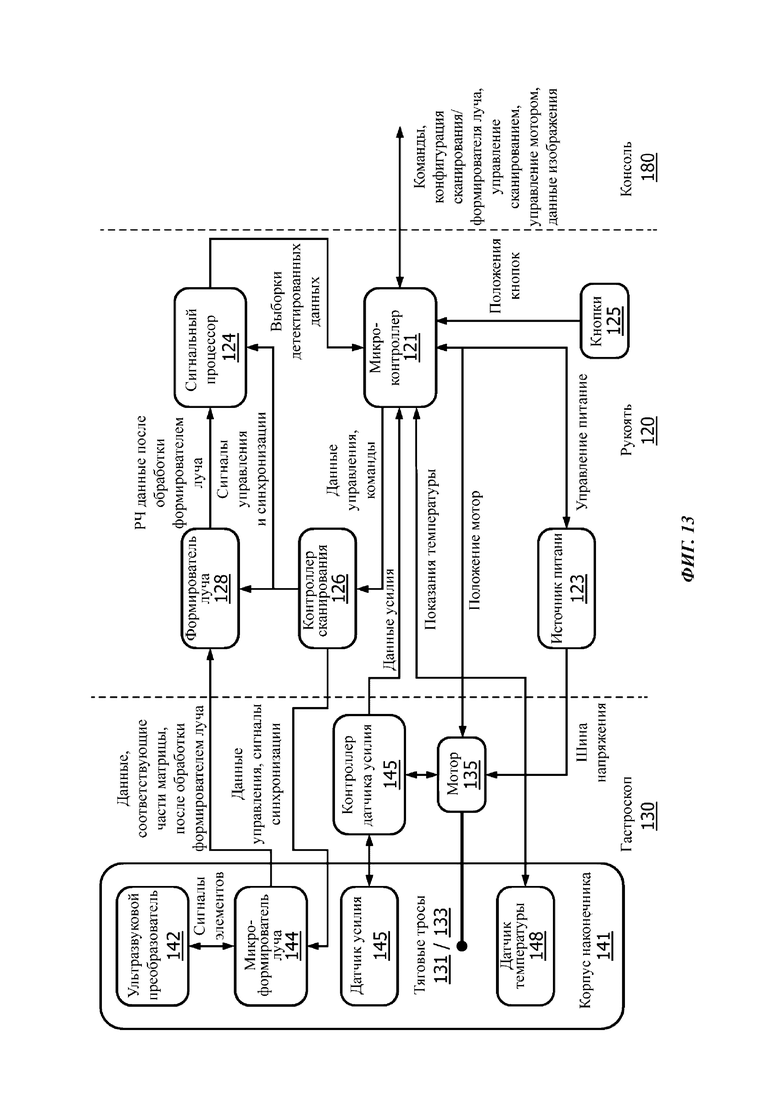
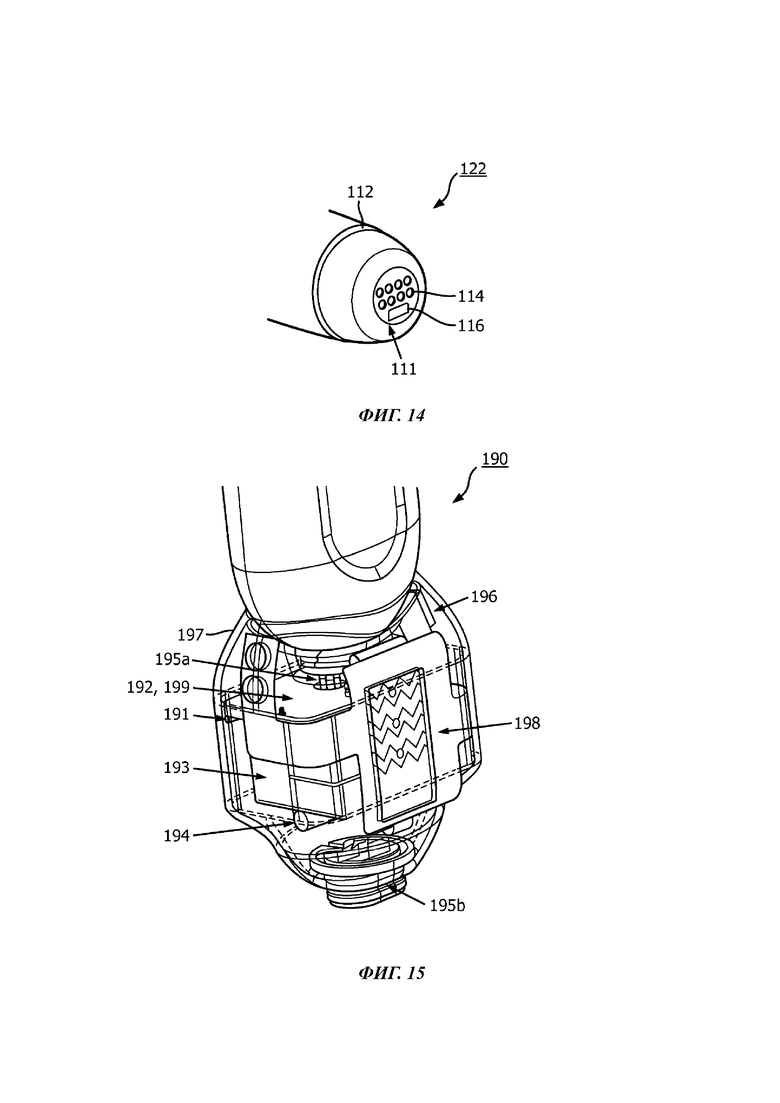
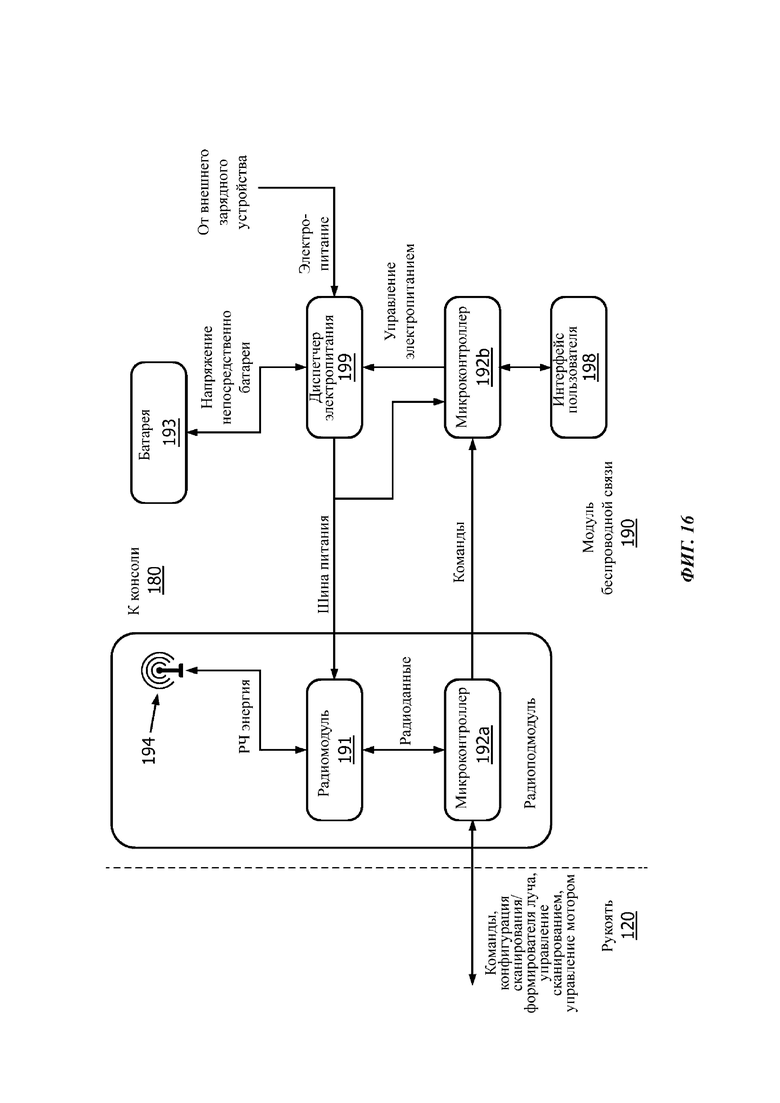
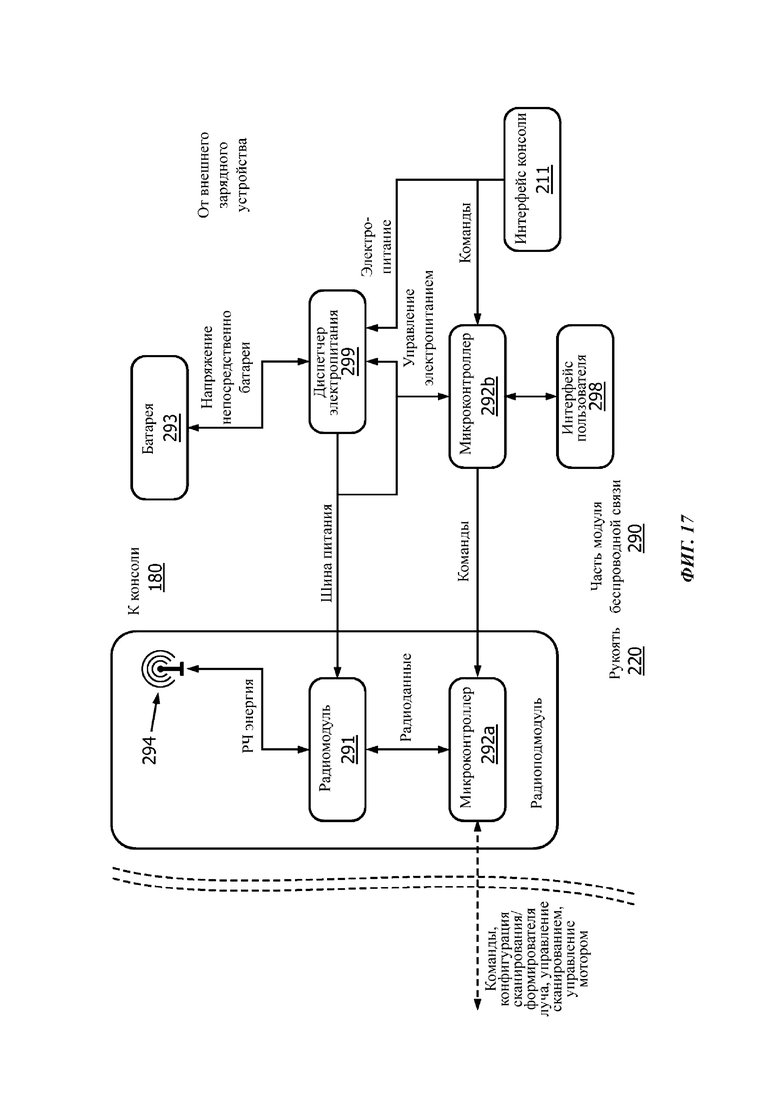
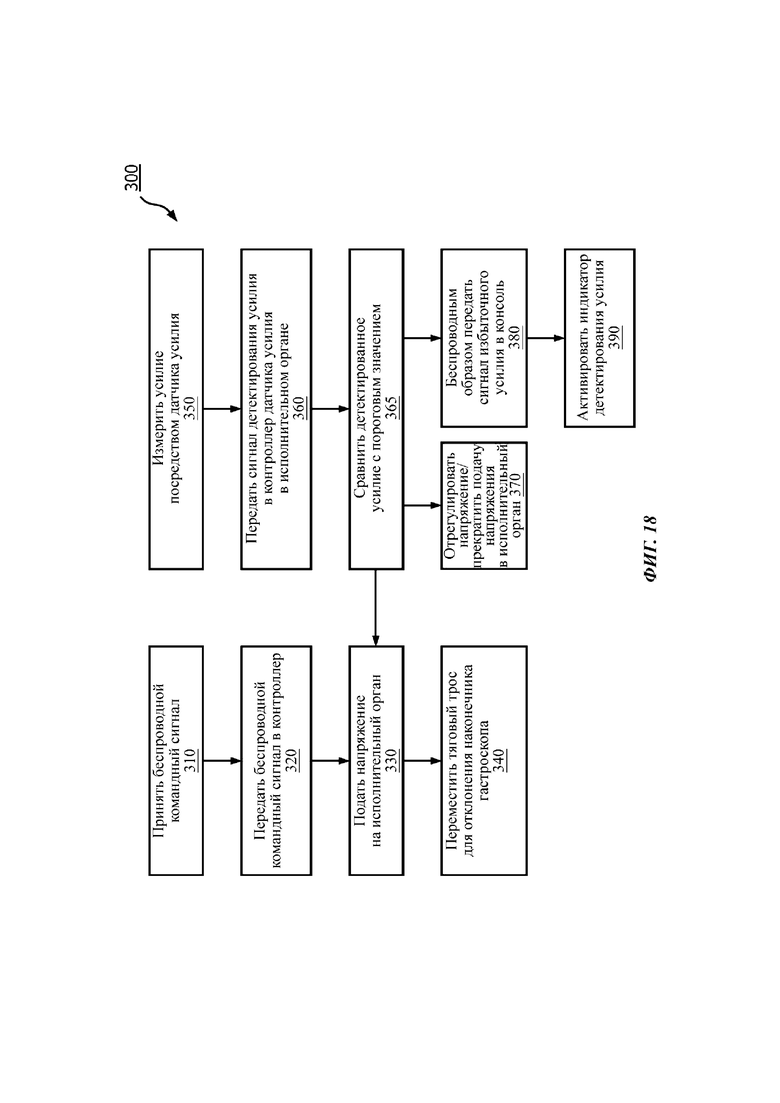

Группа изобретений относится к обследованию и визуализации органов пациента с использованием чреспищеводной эхокардиографии (ЧПЭхоКГ), а именно к зонду для ЧПЭхоКГ, а также к способу беспроводного управления таким зондом. Гастроскоп зонда соединен с рукоятью с возможностью отсоединения и содержит ультразвуковой преобразователь в дистальной части для получения данных ультразвуковой визуализации. Модуль беспроводной связи гастроскопа соединен с рукоятью и выполнен с возможностью приема командного сигнала от консоли, расположенной на расстоянии от зонда для ЧПЭхоКГ, и передачи данных ультразвуковой визуализации в консоль. Микроконтроллер модуля беспроводной связи выполнен с возможностью передачи электрического сигнала в гастроскоп для управления движением дистальной части гастроскопа в ответ на принятый командный сигнал. В дистальной части рукояти расположен интерфейс сопряжения рукояти. В проксимальной части гастроскопа расположен интерфейс сопряжения гастроскопа. Рукоять и гастроскоп разъемным образом соединены друг с другом посредством интерфейса сопряжения рукояти и интерфейса сопряжения гастроскопа. Интерфейс сопряжения рукояти выполнен с возможностью передачи электрического сигнала в гастроскоп через интерфейс сопряжения гастроскопа для управления дистальной частью гастроскопа. Модуль беспроводной связи размещен внутри рукояти. Корпус модуля беспроводной связи соединен с рукоятью. Когда модуль беспроводной связи соединен с рукоятью, модуль беспроводной связи передает электрический сигнал в гастроскоп. Обеспечивается возможность разбирать и снова собирать ЧПЭхоКГ зонд, используя те же самые или другие компоненты, что ускоряет проведение медицинских операций для врача и для пациента, и снижает риск повреждения ЧПЭхоКГ зонда во время процедур очистки за счет использования съемных компонентов. 2 н. и 13 з.п. ф-лы, 19 ил.
1. Зонд для чреспищеводной эхокардиографии, содержащий: рукоять (120);
гастроскоп (130), соединенный с рукоятью с возможностью отсоединения и выполненный с возможностью размещения в пищеводе пациента, при этом гастроскоп содержит ультразвуковой преобразователь (140), расположенный в дистальной части гастроскопа, и выполненный с возможностью получения данных ультразвуковой визуализации;
интерфейс (150) сопряжения рукояти, расположенный в дистальной части рукояти;
и интерфейс (160) сопряжения гастроскопа, расположенный в проксимальной части гастроскопа,
модуль (190) беспроводной связи, соединенный с рукоятью и выполненный с возможностью осуществления связи с гастроскопом, содержащий:
элемент (194) беспроводной связи;
и микроконтроллер (121), выполненный с возможностью осуществления связи с элементом беспроводной связи,
причем модуль беспроводной связи выполнен с возможностью приема командного сигнала от консоли (180), расположенной на расстоянии от зонда для чреспищеводной эхокардиографии, и передачи данных ультразвуковой визуализации в консоль, причем микроконтроллер выполнен с возможностью передачи электрического сигнала в гастроскоп для управления движением дистальной части гастроскопа в ответ на принятый командный сигнал, причем рукоять и гастроскоп разъемным образом соединены друг с другом посредством интерфейса сопряжения рукояти и интерфейса сопряжения гастроскопа,
при этом интерфейс сопряжения рукояти выполнен с возможностью передачи электрического сигнала в гастроскоп через интерфейс сопряжения гастроскопа для управления дистальной частью гастроскопа,
причем модуль (190) беспроводной связи размещен внутри рукояти,
при этом модуль (190) беспроводной связи содержит корпус, соединенный с рукоятью, причем, когда модуль беспроводной связи соединен с рукоятью, модуль беспроводной связи передает электрический сигнал в гастроскоп.
2. Зонд для чреспищеводной эхокардиографии по п. 1, дополнительно содержащий интерфейс (198) пользователя, соединенный с рукоятью и выполненный с возможностью приема ручного ввода данных от пользователя для управления гастроскопом.
3. Зонд для чреспищеводной эхокардиографии по п. 1, в котором гастроскоп содержит:
тяговый трос, соединенный с дистальной частью гастроскопа; и
исполнительный орган, соединенный с тяговым тросом,
при этом микроконтроллер выполнен с возможностью передачи электрического сигнала в исполнительный орган для приведения в действие тягового троса с целью перемещения дистальной части гастроскопа.
4. Зонд для чреспищеводной эхокардиографии по п. 1, в котором микроконтроллер выполнен с возможностью передачи электрического сигнала для управления ультразвуковым преобразователем в ответ на командный сигнал.
5. Зонд для чреспищеводной эхокардиографии по п. 1, в котором ультразвуковой преобразователь включает в себя матрицу ультразвуковых преобразователей, при этом рукоять содержит формирователь луча, выполненный с возможностью осуществления связи с матрицей ультразвуковых преобразователей.
6. Зонд для чреспищеводной эхокардиографии по п. 5, в котором рукоять содержит сигнальный процессор, выполненный с возможностью осуществления связи с формирователем луча.
7. Зонд для чреспищеводной эхокардиографии по п. 5, в котором гастроскоп содержит микроформирователь луча, выполненный с возможностью осуществления связи с матрицей ультразвуковых преобразователей и с формирователем луча.
8. Зонд для чреспищеводной эхокардиографии по п. 1, дополнительно содержащий батарею, выполненную с возможностью питания модуля беспроводной связи и гастроскопа.
9. Зонд для чреспищеводной эхокардиографии по п. 1, в котором указанный корпус съемным образом соединен с рукоятью при помощи по меньшей мере одного из следующих средств: USB-интерфейса или интерфейса в виде подпружиненных штырей.
10. Способ беспроводного управления зондом для чреспищеводной эхокардиографии по п. 1, содержащий этапы, на которых:
посредством элемента беспроводной связи, соединенного с рукоятью зонда для чреспищеводной эхокардиографии, беспроводным образом принимают командный сигнал, передаваемый консолью, расположенной на расстоянии от зонда для чреспищеводной эхокардиографии, в то время как гастроскоп зонда для чреспищеводной эхокардиографии размещен в пищеводе пациента, причем гастроскоп соединен с рукоятью, но с возможностью отсоединения;
посредством элемента беспроводной связи передают принятый командный сигнал в контроллер, соединенный с рукоятью; и
в ответ на принятый командный сигнал посредством контроллера подают напряжение на исполнительный орган, соединенный с гастроскопом, для управления движением дистальной части гастроскопа внутри пищевода,
посредством ультразвукового преобразователя, расположенного в дистальной части гастроскопа, получают данные ультразвуковой визуализации; и
беспроводным образом посредством элемента беспроводной связи передают в консоль данные ультразвуковой визуализации.
11. Способ по п. 10, дополнительно содержащий этапы, на которых:
в контроллере, соединенном с рукоятью, принимают сигнал обратной связи от исполнительного органа; и
на основе сигнала обратной связи посредством исполнительного органа изменяют движение дистальной части гастроскопа.
12. Способ по п. 11, в котором этап приема сигнала обратной связи от исполнительного органа содержит прием сигнала обнаружения усилия, причем этап изменения движения дистальной части гастроскопа содержит прекращение посредством исполнительного органа движения дистальной части гастроскопа.
13. Способ по п. 11, дополнительно содержащий этапы, на которых:
беспроводным образом посредством элемента беспроводной связи передают в консоль сигнал обратной связи, причем сигнал обратной связи содержит сигнал обнаружения усилия; и
в ответ на принятый сигнал обнаружения усилия активируют индикатор обнаружения усилия.
14. Способ по п. 10, дополнительно содержащий этапы, на которых:
принимают в формирователе луча данные ультразвуковой визуализации, полученные ультразвуковым преобразователем; и
передают данные ультразвуковой визуализации, обработанные формирователем луча, в элемент беспроводной связи.
15. Способ по п. 14, дополнительно содержащий этапы, на которых:
принимают в микроформирователе луча данные ультразвуковой визуализации, полученные ультразвуковым преобразователем; и
передают данные ультразвуковой визуализации, обработанные микроформирователем луча, в формирователь луча.
| WO 2010020939 A2, 25.02.2010 | |||
| WO 2017060439 A1, 13.04.2017 | |||
| CN 206659801 U, 24.11.2017 | |||
| EP 3223713 A1, 04.10.2017 | |||
| US 5797844 A, 25.08.1998 | |||
| БЛОК ПОЛИУРЕТАНОВОЙ/ПОЛИИЗОЦИАНУРАТНОЙ ПЕНЫ ТЕПЛОИЗОЛЯЦИОННОГО КОРПУСА РЕЗЕРВУАРА И СПОСОБ ЕГО ПРИГОТОВЛЕНИЯ | 2020 |
|
RU2799199C2 |
| СПОСОБ ВЫБОРА ЛЕЧЕНИЯ ХАЛАЗИИ КАРДИИ | 1997 |
|
RU2153853C2 |

