Настоящее изобретение относится к системам ультразвуковой медицинской диагностики и, в частности, к диагностическим системам с матричными преобразователями, содержащими элементы, сгруппированные по участкам поверхности и работающие с микроформирователем пучка.
Ультразвуковые матричные преобразователи, преобразователи с множеством раздельно управляемых преобразовательных элементов разработаны в ряде конфигураций. Кольцевые матрицы составлены из круглых колец элементов и хорошо подходят для излучения остро сфокусированного пучка прямо вперед, то есть нормально к плоскости преобразовательных элементов. 1D матрица элементов составлена из одного ряда элементов (или нескольких рядов, соединенных для работы синхронно), которые могут сканировать одну плоскость изображения, азимутальную плоскость, нормальную к ряду элементов. 1,5D матрица содержит несколько рядов элементов, которые можно приводить в действие симметрично по высоте, чтобы сканировать азимутальную плоскость, нормальную к матрице, но пучками, которые электронными средствами фокусируются как по азимуту, так и по высоте. 2D (двумерная) матрица содержит элементы, расположенные как в азимутальном, так и в вертикальном направлениях, которые можно приводить в действие совершенно независимо, чтобы и фокусировать, и направлять пучки в любом азимутальном или вертикальном направлении. За исключением кольцевой матрицы, упомянутые матрицы могут быть конфигурированы либо в плоской, либо в криволинейных ориентациях. Настоящее изобретение относится к 2D матричным преобразователям, которые могут направляться и фокусироваться как по азимуту, так и по высоте, чтобы сканировать трехмерную объемную область интереса.
Двумерные матричные преобразователи и даже 1D матрица с большими числами элементов имеют проблему, обусловленную большим числом преобразовательных элементов. Поскольку каждый из упомянутых элементов должен управляться по отдельности на излучение и прием, то должна быть обеспечена отдельная линия сигнала для каждого элемента. 1D матрица может содержать ряд из 100-200 элементов, требующих 100-200 линий сигналов, которые могут помещаться в относительно небольшом и легком кабеле датчика, но могут нуждаться в работе с формирователем пучка системы с относительно немногочисленными каналами. 2D матрица может содержать 100-200 рядов элементов в одном измерении и 100-200 столбцов элементов в другом измерении, составляющих в сумме тысячи отдельных элементов. Кабель из многих тысяч линий сигналов не осуществим на практике для датчика, которым должен удерживаться в руке и подвергаться манипуляциям специалистом по ультразвуковой эхографии. Осуществление настоящего изобретения устраняет приведенные проблемы путем использования интегральной схемы микроформирователя пучка, соединенной с 2D матрицей, которая выполняет частичное формирование пучка от групп элементов, называемых участками поверхности. Затем суммарный сигнал из элементов каждого участка поверхности проводится по кабелю стандартного размера в формирователь пучка ультразвуковой системы, где суммарный сигнал от каждого участка поверхности подается в канал формирователя пучка системы, который завершает операцию формирования пучка. Данное разделение полной операции формирования пучка между микроформирователем пучка в датчике и каналами формирователя пучка системы, поясняемое, например, в патенте США № 5,229,933 (Larson, III), позволяет использовать кабель с относительно небольшим числом линий сигналов между датчиком и ультразвуковой системой.
Число элементов, используемых для приема эхо-сигналов вдоль сканирующей линии, можно выбирать и изменять, управляя тем самым активной апертурой матрицы. Подобно оптической системе, число элементов в активной апертуре относится к f-числу апертуры. Когда эхо-сигналы принимаются из ближнего поля непосредственно перед матрицей, лишь небольшое число элементов можно использовать для приема первоначальных эхо-сигналов с небольшой глубины пучка. Однако, по мере того, как эхо-сигналы принимаются с увеличивающихся глубин, дополнительные элементы с каждой стороны от первоначально используемых элементов могут добавляться с равномерным шагом, чтобы поддерживать f-число апертуры и чувствительность датчика к эхо-сигналам с больших глубин. Данный динамический контроль апертуры достаточно понятен для 1D матриц, но становится более сложным, когда применяют 2D матрицу, или требуется многолинейный прием. При многолинейном приеме эхо-сигналы из преобразовательных элементов для нескольких пространственно дискретных линий обрабатываются по-разному для различных линий, и одновременно формируется несколько линий приема. См., например, патент США № 5,431,167 (Savord). Микроформирователь пучка с несколькими параллельными процессорами для каждого преобразовательного элемента 2D матрицы будет исключительно сложным, дорогим и ограниченным по пространству, доступному в ручном ультразвуковом датчике. Однако, многолинейный прием очень востребован для многих датчиков, в частности, для 2D матрицы, вследствие того, что требуется излучать и принимать пучки в/из объемной область(и) в пределах времени допустимой частоты получения кадров, и скорость звука является непреложным законом физики. Следовательно, требуется метод, предоставляющий возможность выполнять многолинейный прием высокого порядка, одновременно поддерживая высококачественное безартефактное функционирование.
В соответствии с принципами настоящего изобретения, матрица ультразвуковых преобразователей приводится в действие с микроформирователем пучка для обработки сигналов из заданных участков поверхности преобразовательных элементов. В процессе приема из ближнего поля используется первый размер участка поверхности, предпочтительно, наименьший размер участка поверхности в большинстве вариантов осуществления. По мере того, как эхо-сигналы принимаются с увеличивающихся глубин поля, апертура увеличивается посредством добавления участков поверхности разного и, предпочтительно, последовательно большего размера к активной апертуре, когда угол приема участка поверхности для эхо-сигналов с больших глубин уменьшается. Осуществление настоящего изобретения допускает прием высокого порядка многоэлементных линий без артефактов и неоднородностей яркости изображения.
На чертежах:
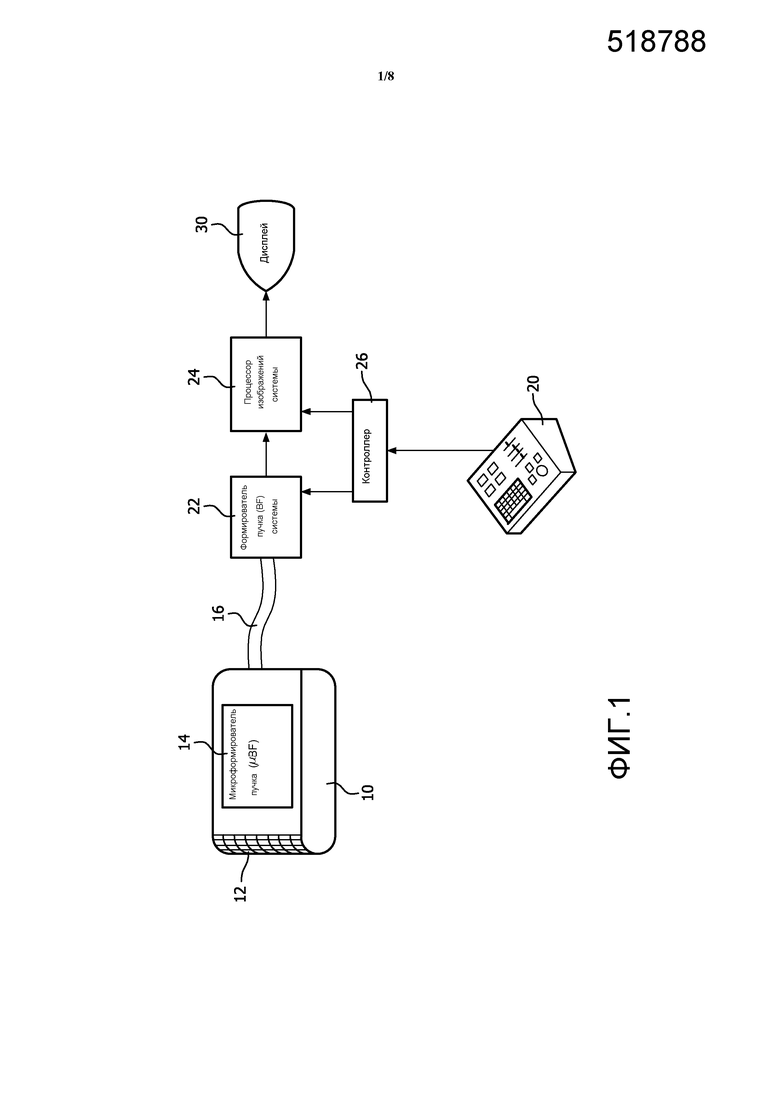
Фиг. 1 - иллюстрирует блок-схему 2D криволинейного матричного преобразователя и датчика с микроформирователем пучка в соответствии с настоящим изобретением.
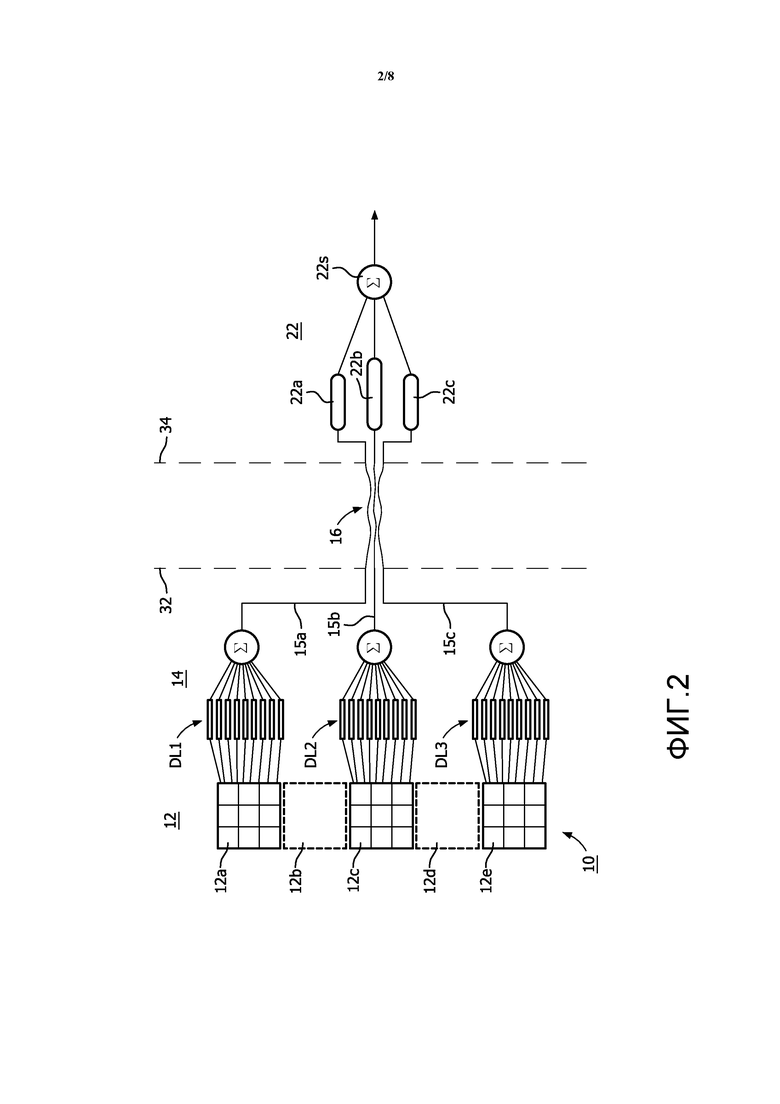
Фиг. 2 - блок-схема, поясняющая микроформирователь пучка с частичным суммированием пучков.
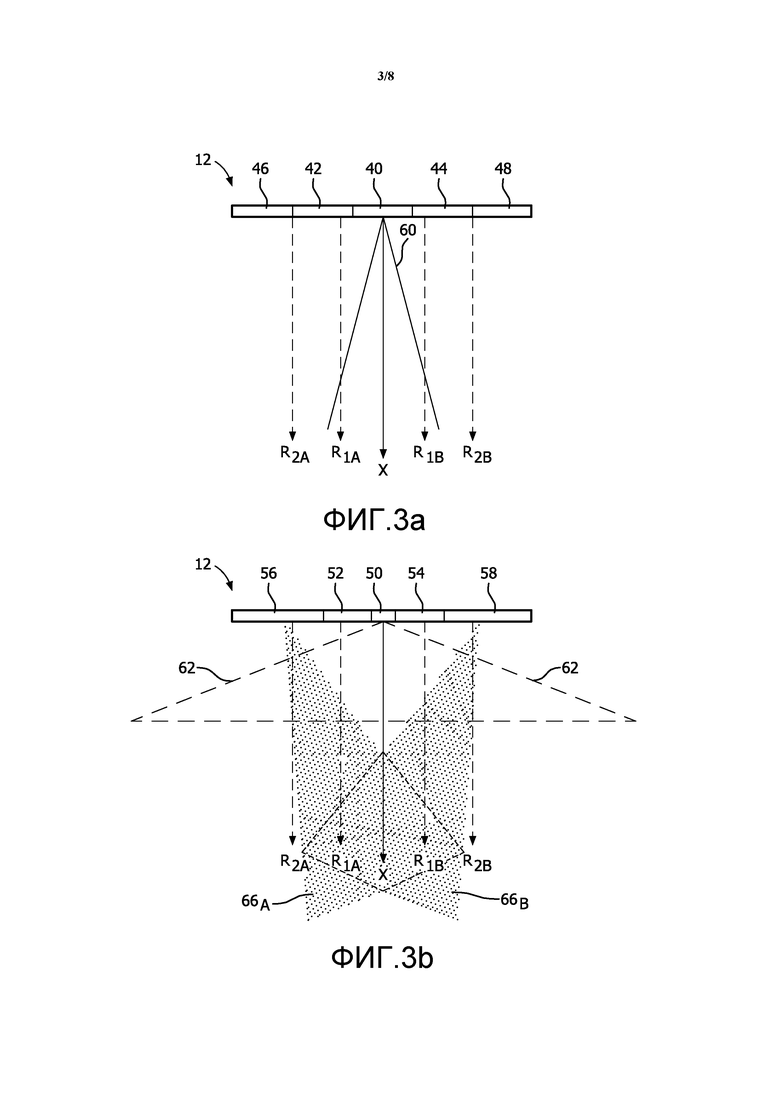
Фиг. 3a - иллюстрирует многолинейный прием с 2D матричным преобразователем, использующим одинаковые размеры участков поверхности.
Фиг. 3b - иллюстрирует многолинейный прием с 2D матричным преобразователем, использующим последовательно увеличивающиеся размеры участков поверхности в соответствии с принципами настоящего изобретения.
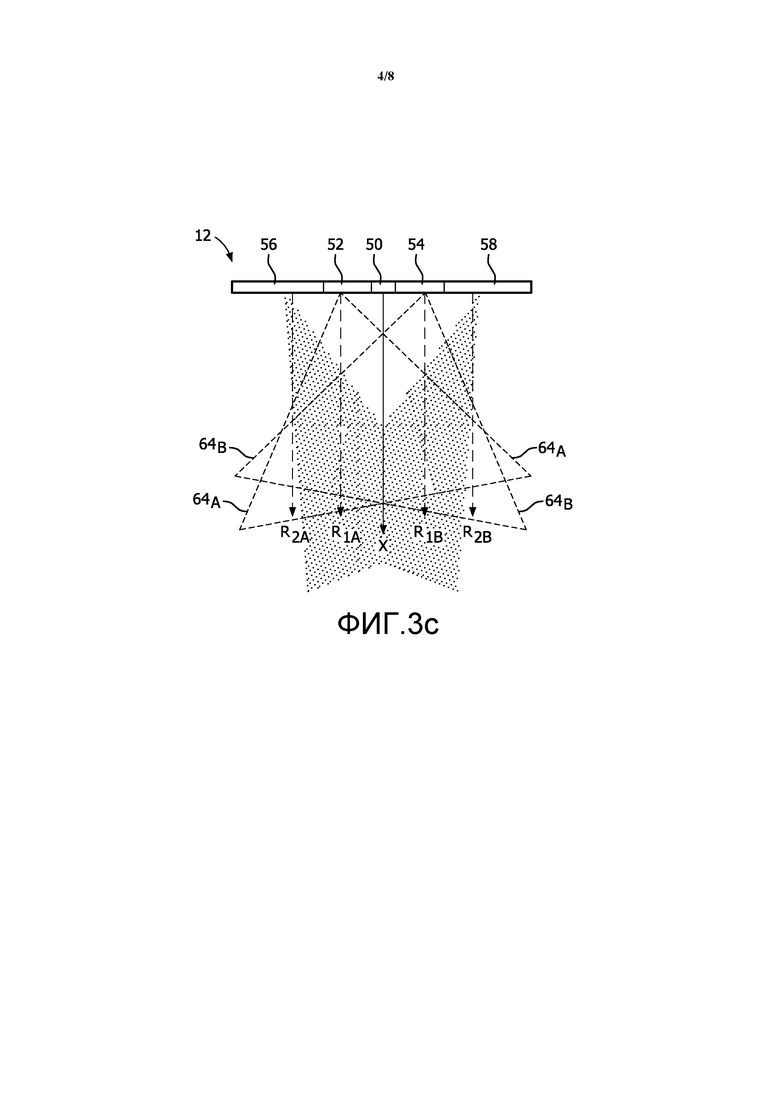
Фиг. 3c - другая иллюстрация чертежа на фиг. 3b, которая выделяет профили пучков участков поверхности промежуточного размера.
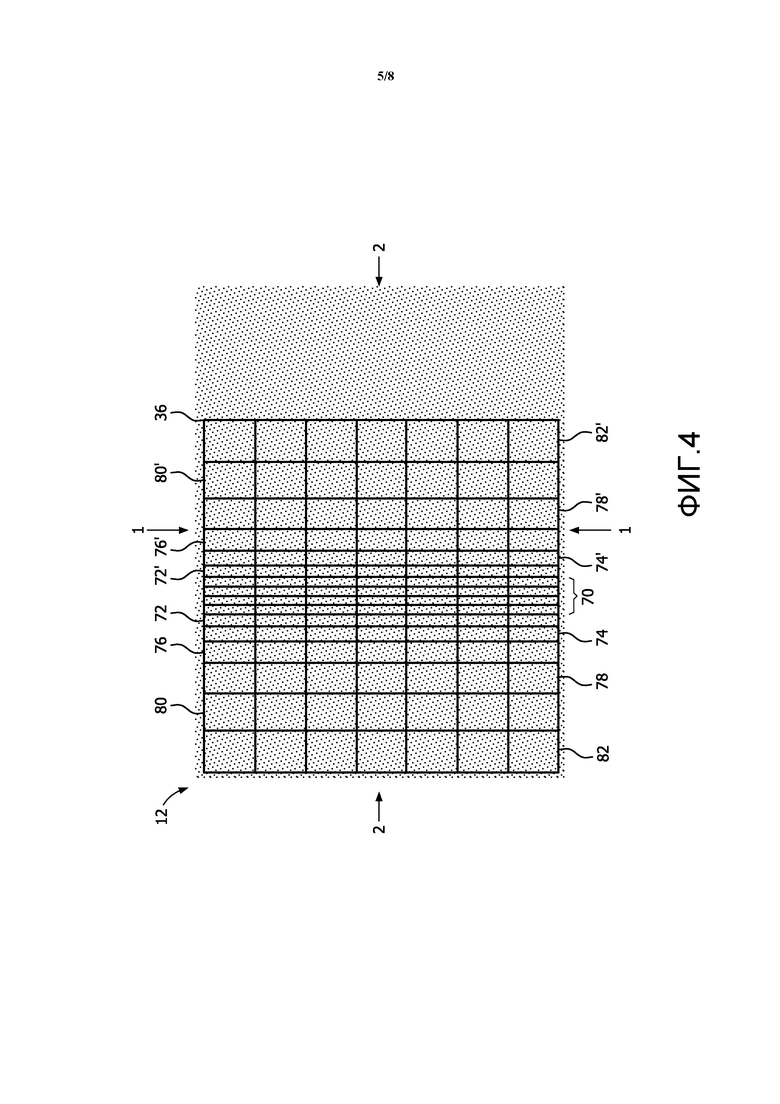
Фиг. 4 - схема области участков поверхности для азимутального сканирования 2D матричным преобразователем, созданным в соответствии с принципами настоящего изобретения.
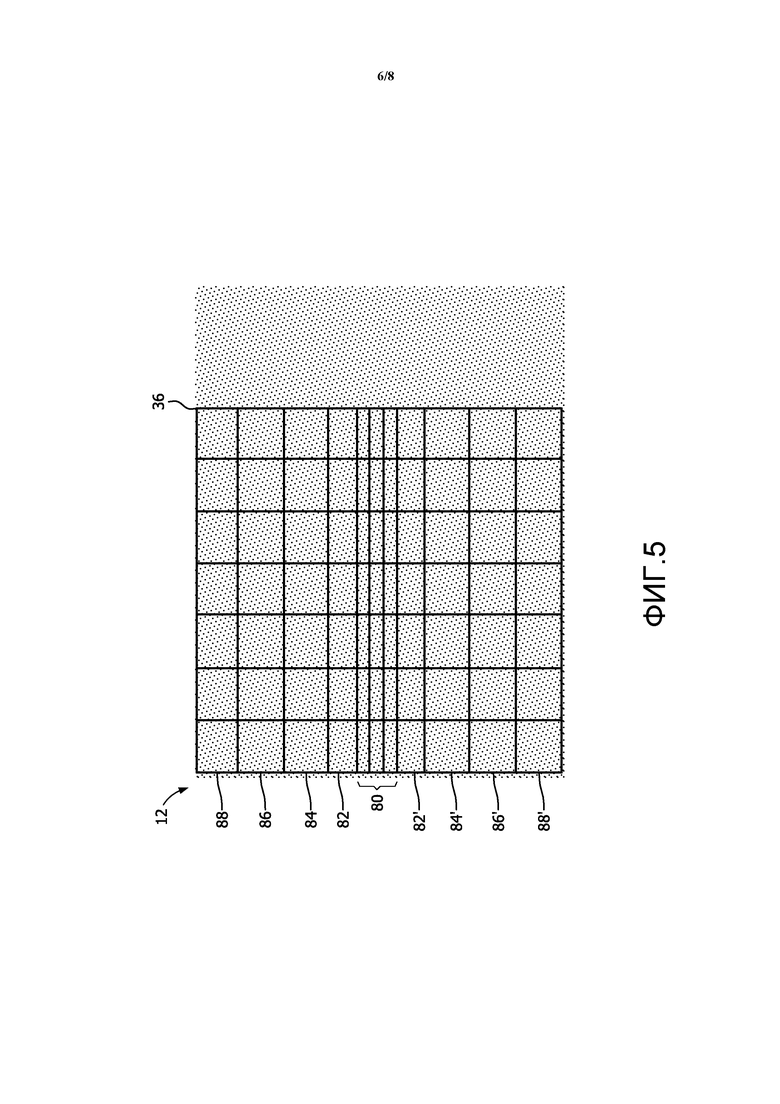
Фиг. 5 - иллюстрирует область участков поверхности для вертикального сканирования 22D матричным преобразователем, созданным в соответствии с принципами настоящего изобретения.
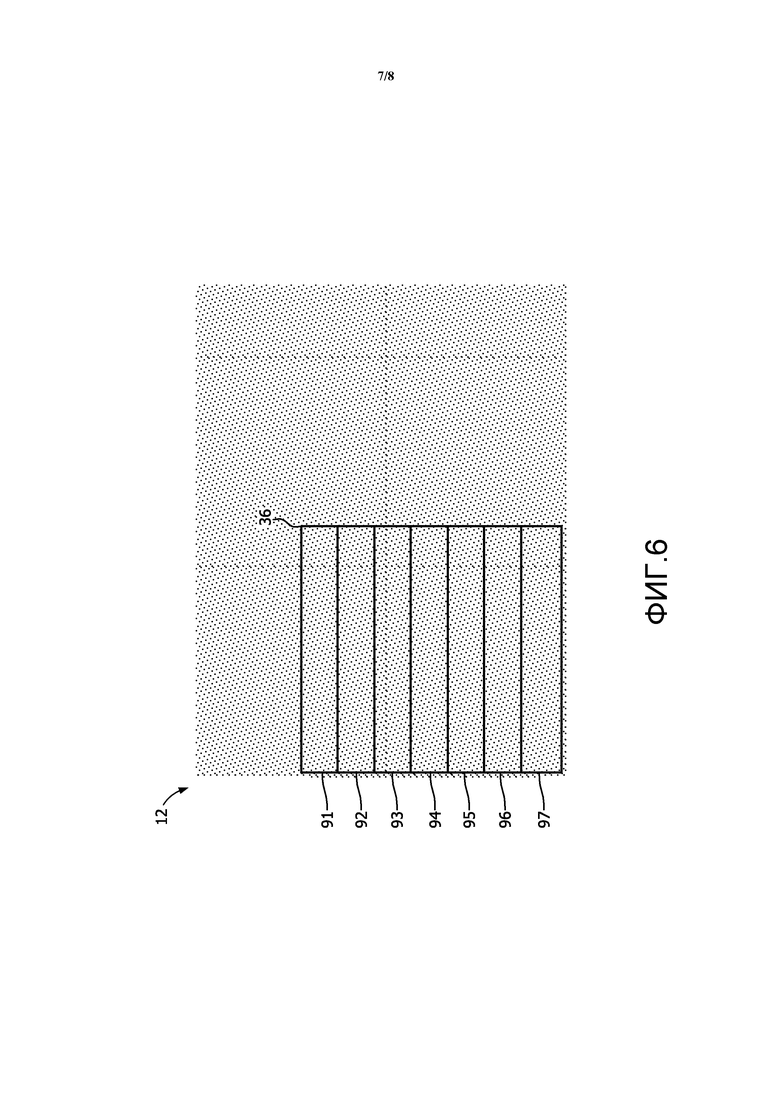
Фиг. 6 - иллюстрирует область 2D матричного преобразователя для применения в формирователе пучка системы с небольшим числом каналов, который не нуждается в многолинейном сборе данных.
Фиг. 7 - иллюстрирует перекрестную коммутационную матрицу для связи участков поверхности 2D матрицы различных размеров с формирователем пучка системы в соответствии с принципами настоящего изобретения.
На фиг. 1 представлена блок-схема ультразвуковой системы, созданной в соответствии с принципами настоящего изобретения. Датчик 10 содержит двумерный матричный преобразователь 12, который является криволинейным в вертикальном измерении, например, датчик, представленный в патенте США № 7,927,280 (Davidsen). Элементы матрицы соединены с микроформирователем 14 пучка, расположенным в датчике позади матрицы преобразователей. Микроформирователь пучка подает синхронизированные излучаемые импульсы в элементы матрицы для излучения пучков в требуемых направлениях и в требуемые фокальные точки в трехмерном поле изображения перед матрицей. Эхо-сигналы от излучаемых пучков принимаются матричными элементами и вводятся в каналы микроформирователя 14 пучка, где они по отдельности задерживаются. Задержанные сигналы от участка поверхности преобразовательных элементов складываются для формирования частично суммированного сигнала для участка поверхности. В контексте настоящей заявки термин «участок поверхности» относится к группе преобразовательных элементов, которые являются смежными и совместно работающими, или чьи сигналы суммируются микроформирователем пучка для формирования одного сигнала для формирователя пучка ультразвуковой системы. В типичном варианте осуществления, суммирование выполняется вводом задержанных сигналов из элементов участка поверхности в общую шину, устраняя потребность в суммирующих схемах или других сложных схемах. Шина каждого участка поверхности соединена с проводником кабеля 16, который проводит частично суммированный сигнал участка поверхности в базовую станцию системы. В базовой станции системы частично суммированные сигналы оцифровываются и вводятся в каналы формирователя 22 пучка системы, который соответственно задерживает каждый частично суммированный сигнал. Затем задержанные частично суммированные сигналы суммируются для формирования когерентного направленного и сфокусированного принимаемого пучка. Сигналы пучков из 3D поля изображения обрабатываются процессором 24 сигналов и изображений, чтобы создавать 2D или 3D изображения для отображения на дисплее 30 изображений. Управление параметрами ультразвуковой системы, например, выбор датчика, направление и фокусирование пучка и обработка сигналов и изображений, выполняется, под управлением контроллера 26, который связан с различными модулями системы. В случае датчика 10, какая-то часть данной управляющей информации обеспечивается из базовой станции системы по линиям данных кабеля 16. Пользователь управляет приведенными рабочими параметрами при посредстве панели 20 управления.
Фиг. 2 поясняет идею частично суммирующего микроформирователя пучка. Чертеж на фиг. 2 подразделен на три участка пунктирными линиями 32 и 34. Компоненты датчика 10 показаны слева от линии 32, компоненты базовой станции системы показаны справа от линии 34, и кабель 16 показан между двумя линиями. Двумерная матрица 12 датчика разделена на участки поверхности смежных преобразовательных элементов. На чертеже показаны пять участков поверхности матрицы 12, содержащих, каждый, девять смежных элементов. На чертеже показаны каналы микроформирователя пучка для участков 12a, 12c и 12e поверхности. Девять элементов участка 12a поверхности подсоединены к девяти линиям задержки микроформирователя пучка, обозначенного DL1. Аналогично, по девять элементов участков 12c и 12e поверхностей подсоединены к девяти линиям задержки, обозначенным DL2 и DL3. Задержки, вносимые упомянутыми линиями задержки, являются функцией многочисленных переменных, например, размера матрицы, шага элементов, шага и размеров участка поверхности, диапазона направления пучка и других переменных. Группы DL1, DL2 и DL3 линий задержки задерживают, каждая, сигналы из элементов их соответствующего участка поверхности соответственно общей привязке по времени для участка поверхности. Затем девять задержанных сигналов от каждой группы линий задержки суммируются соответствующим сумматором ∑, чтобы формировать частично суммированный сигнал матрицы от участка поверхности элементов. Каждый частично суммированный сигнал подается в отдельную шину 15a, 15b и 15c, каждая из которых соединена с проводником кабеля 16, который проводит частично суммированные сигналы в базовую станцию системы. В базовой станции системы каждый частично суммированный сигнал подается в линию 22a, 22b, 22c задержки формирователя 22 пучка системы. Упомянутые линии задержки фокусируют частично суммированные сигналы в общий пучок на выходе сумматора 22s формирователя пучка системы. Затем полностью сформированный пучок передается в процессор сигналов и изображений для дополнительной обработки и отображения. Хотя пример на фиг. 2 показан с 9-элементными участками поверхности, следует понимать, что созданная система микроформирователя пучка будет содержать, обычно, участки поверхности с большим числом элементов, например, 12, 20, 48 или 70 или более элементов. Элементы участка поверхности могут быть прилегающими друг к другу, разделенными промежутками или даже перемешанными в виде шахматной конфигурации, с «нечетно»-нумерованными элементами, объединенными в один участок поверхности, и «четно»-нумерованными элементами, объединенными в другом участок поверхности. Участки поверхности могут быть квадратными, прямоугольными, ромбическими, гексагональными или любой другой требуемой формы.
Фиг. 3a иллюстрирует проблему многолинейного сбора данных, которую можно решить с помощью варианта осуществления настоящего изобретения. На фиг. 3a изображен профиль 60 принимаемого пучка, контур участка или объема поля изображения, в котором эхо-сигналы принимаются до глубины X в поле. Четыре многоэлементных линии R1A, R2A, R1B и R2B должны приниматься с каждой стороны линии по центру поля изображения посредством матричного преобразователя 12, который операционно разделен на пять участков поверхности равного размера, 40, 42, 44, 46 и 48. Как показано на фиг. 3a, профиль 60 пучка набора из участков 40-48 поверхности одинакового размера является относительно узкой областью в центре поля изображения. Только самые удаленные глубины двух многоэлементных линий, ближайших к центру поля, R1A и R1B, находятся в пределах профиля принимаемого пучка. Остальная протяженность многоэлементных линий R1A и R1B и вся протяженность внешних многоэлементных линий R2A и R2B находятся за пределами профиля принимаемого пучка. Следовательно, принятые сигналы для данных пучков будут иметь низкую интенсивность, что приводит к неустойчиво принимаемым эхо-сигналам, которые будут лишь слабо представлены в изображении, использующем упомянутые многоэлементные линии. Полученные артефакты будут проявляться как мерцающие полосы света и темные полоски в результирующем ультразвуковом изображении.
На фиг. 3b, участки поверхности различных размеров последовательно добавлены в апертуру, чтобы обеспечить полный охват принятых эхо-сигналов для многоэлементных линий. Центральный участок поверхности 50 является наименьшим, что обеспечивает для данного участка поверхности максимальный угол приема для принимаемых эхо-сигналов и профиль 62 принимаемого пучка, который является относительно мелким в глубину, однако, широким по горизонтали, как показано на фиг. 3b. Очевидно, что профиль 62 принимаемого пучка для данного небольшого центрального участка поверхности охватывает ближнее поле всех четырех многоэлементных линий. Смежные участки 52 и 54 поверхности с каждой стороны центрального участка 50 поверхности добавляются, в то время как принимаются эхо-сигналы с увеличенных глубин, и охватывают прием среднеглубинных эхо-сигналов всех четырех многоэлементных линий, как показано на фиг. 3c. Как представляется, профили 64A и 64B пучков, полученные при добавлении двух участков 52 и 54 поверхности большего размера охватывают все четыре многоэлементных линии. Как также представляется, профили пучков от каждого из участка поверхности большего размера направлены немного к центру поля изображения, чтобы обеспечивать полный охват сканируемой области. И, наконец, к активной апертуре добавляются крайние участки 56 и 58 поверхности еще большего размера. Профили 66A и 66B принимаемых пучков, получаемые данными участков поверхности, показаны на фиг. 3b. Данные профили пучков продолжаются до максимальных глубин поля изображения, как представляется, имеют наименьшие углы приема из любых профилей пучков и, как также представляется, направлены немного к центру поля изображения, чтобы допускать полный охват сканируемой области. Комбинация всех участков поверхности различных размеров допускает полный охват поля изображения, предотвращая прием эхо-сигналов снаружи профиля пучка и возникающие, в результате, мерцающие артефакты изображения.
В то время как фиг. 3b и 3c изображают только одно измерение участков поверхности матричного преобразователя в соответствии с настоящим изобретением, фиг. 4-6 представляют топографические проекции 2D матриц 12, которые поясняют размеры участков поверхности примерных 2D матриц в соответствии с настоящим изобретением как в азимутальном (горизонтальном), так и в высотном (вертикальном) измерениях. Каждая 2D матрица 12, показанная в приведенных примерах, содержит, 160 элементов по азимуту, и 120 элементов по высоте, в сумме, 19200 элементов в каждой 2D матрице. Четыре специализированных интегральных схемы (ASIC) микроформирователей пучка применяются для выполнения первоначального частичного формирования пучка для каждой матрицы. Одна схема ASIC расположена за каждым квадрантом матрицы, как указано координатными линиями 1-1 и 2-2, которые определяют границы схем ASIC. На фиг. 4 и 5 участки поверхности оконтурены темными линиями. В примере на фиг. 4 имеется семь рядов участков поверхности и шестнадцать столбцов участков поверхности. Как представляется, данный участок 36 полной апертуры захватывает меньше полного участка 2D матрицы 12, так что апертура может перемещаться пошагово по 2D матрице для других пространственно отличающихся сканирующих линий, как описано в патенте США № 8,161,817 (Savord) автора настоящей заявки. Как представляется, апертура 36 участков поверхностей на фиг. 4 находится на левой стороне 2D матрицы и, в таком случае, пошагово перемещается в правую сторону.
Участки поверхности в апертуре 36 на фиг. 4 являются наименьшими в центре апертуры и наибольшими на азимутальных краях апертуры. Каждый ряд участков поверхности в данном примере равняется 22 элементам в высоту в вертикальном измерении; следовательно, каждый участок поверхности равняется 22 элементам в высоту. В азимутальном измерении, четыре центральных участка поверхности равняются трем элементам в ширину, как указано скобкой 70 по концам четырех центральных столбцов участков поверхности. Следующие к краям столбцы 72 и 72' участков поверхности равняются 4 элементам в ширину, и следующие столбцы 74 и 74' равняются 5 элементам в ширину. Столбцы 76 и 76' участков поверхности равняются 7 элементам в ширину, и столбцы 78 и 78' участков поверхности равняются 10 элементам в ширину. Следующие внешние столбцы 80 и 80' равняются 12 элементам в ширину, и крайние столбцы 82 и 82' на вертикальных пределах апертуры 36 равняются 14 элементам в ширину. Прием 2D матрицей, показанной на фиг. 4, будет начинаться с использования двух или четырех небольших центральных участков поверхности, сначала, на минимальной глубине, затем последовательно переключаясь на следующие смежные участки поверхности с каждой стороны по мере того, как эхо-сигналы принимаются с увеличенных глубин, пока полная апертура участков поверхности не становится активной и не используется до максимальной требуемой глубины приема. Приведенный выбор расположения хорошо подходит для сканирования серии параллельных или немного наклоненных плоскостей, продолжающихся, каждая, в азимутальном направлении через визуализируемый объем.
Если плоскости подлежат сканированию в ортогональном направлении, с набором плоскостей, которые продолжаются, каждая, в вертикальном направлении, то можно применить расположение участков поверхности, показанное, например, на фиг. 5. Активная апертура 36 2D матрицы 12, показанной на фиг. 5, содержит семь столбцов участков поверхности, продолжающихся в вертикальном измерении, которые имеют одинаковые размеры в азимутальном (горизонтальном на чертеже) направлении. В вертикальном измерении размер участков поверхности изменяется от наименьшего в центре апертуры, для трех рядов участков поверхности, объединенных скобкой 80, которые равняются, каждый, шести элементам в высоту в вертикальном направлении. Следующие снаружи участки поверхности, указанные в рядах 82 и 82', равняются, каждый, 12 элементам в высоту, и следующие участки поверхности 84 и 84' равняются, каждый, 19 элементам в высоту. По два крайних ряда на каждом пределе по высоте, ряды 86, 88, 86' и 88', равняются, каждый, 20 элементов в высоту. Сканирование выполняется, начиная прием с минимальных участков 80 поверхности в центре, одного первого или всех трех, затем последовательно добавляя смежные участки поверхности симметричными парами от центра, чтобы увеличить активную апертуру до полной апертуры 36 на максимальной глубине поля. Подобно тому, как в случае 2D матрицы на фиг. 4, активную апертуру 36 на фиг. 5 можно перемещать по матрице в азимутальном направлении, чтобы сканировать дополнительные сканирующие линии в объемной области перед матрицей.
Фиг. 6 иллюстрирует пример использования упомянутой 19200-элементной 2D матрицы 12 для визуализации ультразвуковой системой только с семью каналами формирователя пучка. Как показано на фиг. 6, в активной апертуре 36 имеется только семь участков 91-97 поверхности, при этом суммированные сигналы, обработанные методом частичного формирования пучка, от каждого участка поверхности подаются в канал 7-канального формирователя пучка ультразвуковой системы. Как прежде, активная апертура из семи участков поверхности может перемещаться в различные другие позиции на матрице. Каждый участок поверхности в приведенном примере содержит 1280 элементов, 16 элементов в вертикальном направлении и 80 элементов в азимутальном направлении. Апертура данной конфигурации в общем не будет применяться для многолинейного сканирования по азимуту, но будет применяться для многолинейного приема низкого порядка по высоте.
Фиг. 7 изображает перекрестную коммутационную матрицу, пригодную для селективного ввода сигналов, обработанных микроформирователем пучка, из микроформирователя 14 пучка датчика в каналы формирователя 22 пучка системы. Каждый элемент 2D матричного преобразователя, например, элемент 0, элемент 1, … элемент 3000, соединен со схемами 14' микроформирователя 14 пучка, которые вносят соответствующую задержку в принятые сигналы. Каждый задержанный сигнал элемента проводится по линии 112, 114, … 120 в плечи электронных коммутаторов, например, 122, 124, … 126 и 132, 134, … 136. Один из электронных коммутаторов в линии замыкается для ввода сигнала из элемента в выбранных канал формирователя пучка системы, например, системный канал 0, системный канал 1, … системный канал 2. Посредством селективного замыкания требуемого коммутатора в перекрестной коммутационной матрице, любой задержанный сигнал элемента может быть подан в шину 102, 104, … 110 для суммирования с другими сигналами на шине и подан в канал формирователя 22 пучка системы для завершения операции формирования пучка.
Хотя применение настоящего изобретения желательно, в частности, когда датчик использует 2D матричный преобразователь, оно полезно также для датчиков, использующих 1D матрицы, которые работают с микроформирователем пучка в датчике. Данную схему расположения можно применять в работе с формирователями пучков ультразвуковой системы с очень малым числом каналов, например, с формирователями пучков системы только с восемью, десятью или двенадцатью каналами, как описано в заявке на патент США № 61/503,329 (Poland et al.), поданной 30 июня 2011 г. Осуществление настоящего изобретения может улучшить многолинейное функционирование 1D матричных датчиков с микроформирователями пучков в таких системах с уменьшенным числом каналов, как, например, упомянутые.

Двумерный ультразвуковой матричный преобразователь принимает эхо-сигналы с увеличивающихся глубин объемной области. 2D матрица конфигурирована в участки поверхности из элементов, которые обрабатываются микроформирователем пучка, и суммированные сигналы из участка поверхности вводятся в канал формирователя ультразвукового пучка. На наименьшей глубине 2D матрица принимает эхо-сигналы из небольших участков поверхности в центре апертуры. По мере того, как сигналы принимаются с увеличивающихся глубин, апертура наращивается посредством симметричного добавления участков поверхности последовательно увеличивающихся размеров с каждой стороны от небольших участков поверхности в центре. Способ по изобретению может совершенствовать многолинейное функционирование как 1D, так и 2D матричных датчиков. 13 з.п. ф-лы, 9 ил.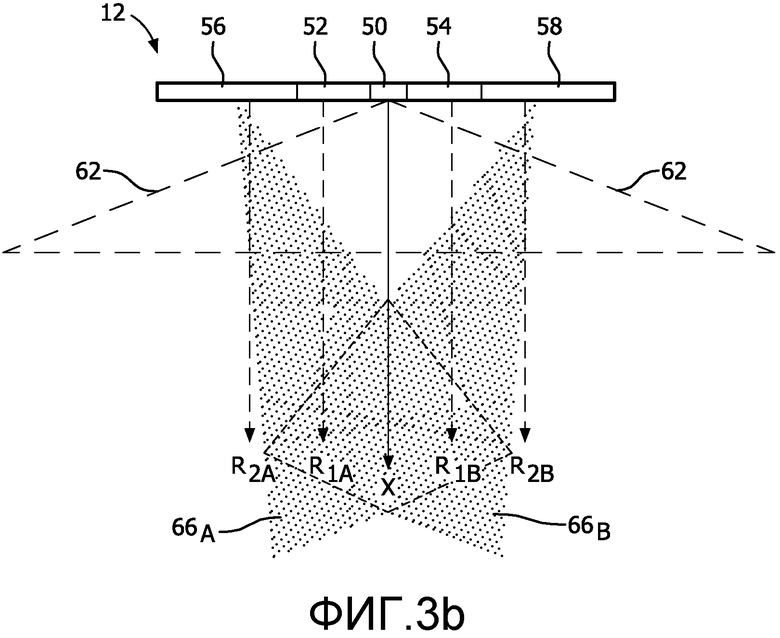
1. Способ управления апертурой матричного преобразователя ультразвукового датчика, при этом элементы матрицы соединены с микроформирователем пучка в датчике, который выполняет по меньшей мере частичное формирование пучка для принятых эхо-сигналов, причем способ содержит этапы, на которых:
конфигурируют апертуру матрицы во множество участков поверхности различных размеров, причем каждый участок поверхности из множества участков поверхности содержит группу преобразовательных элементов, соединенных с микроформирователем пучка;
принимают эхо-сигналы с небольшой глубины поля с активной апертурой, содержащей один или более участков поверхности из множества участков поверхности, причём каждый из одного или более участков поверхности имеет первый размер; и
принимают эхо-сигналы с большей глубины поля посредством наращивания активной апертуры для добавления участков поверхности, каждый из которых имеет второй размер, больший чем первый размер;
причём этап конфигурирования дополнительно содержит этап, на котором конфигурируют участки поверхности одинакового размера в первом измерении и другого размера во втором измерении таким образом, что наименьший участок поверхности расположен в центре апертуры либо в первом измерении, либо во втором измерении, при этом участки поверхности с последовательно увеличивающимся размером расположены по обе стороны от наименьшего участка поверхности либо в первом измерении, либо во втором измерении.
2. Способ по п. 1, в котором матричный преобразователь дополнительно содержит двумерную (2D) матрицу преобразовательных элементов.
3. Способ по п. 1, в котором этап приема эхо-сигналов с большей глубины поля дополнительно содержит этап, на котором наращивают активную апертуру симметрично относительно одного или более участков поверхности первого размера.
4. Способ по п. 1, в котором этап приема эхо-сигналов с большей глубины поля дополнительно содержит этап, на котором наращивают активную апертуру для добавления участков поверхности наибольшего размера с каждой стороны участков поверхности большего размера.
5. Способ по п. 2, дополнительно содержащий этап, на котором перемещают активную апертуру к другим группам преобразовательных элементов 2D матрицы.
6. Способ по п. 1, в котором первое измерение содержит вертикальное измерение, и второе измерение содержит азимутальное измерение.
7. Способ по п. 6, в котором этап конфигурирования дополнительно содержит этап, на котором конфигурируют наименьший участок поверхности в центре апертуры в азимутальном измерении с участками поверхности последовательно увеличивающегося размера, продолжающимися с каждой стороны от наименьшего участка поверхности до азимутальных пределов апертуры с каждой стороны от наименьшего участка поверхности.
8. Способ по п. 1, в котором первое измерение содержит азимутальное измерение и второе измерение содержит вертикальное измерение.
9. Способ по п. 8, в котором этап конфигурирования дополнительно содержит этап, на котором конфигурируют наименьший участок поверхности в центре апертуры в вертикальном измерении с участками поверхности последовательно увеличивающегося размера, продолжающимися с каждой стороны от наименьшего участка поверхности до пределов по высоте апертуры с каждой стороны от наименьшего участка поверхности.
10. Способ по п. 1, дополнительно содержащий этап, на котором выполняют частичное формирование пучка для сигналов из элементов участка поверхности посредством микроформирователя пучка; и этап, на котором завершают формирование пучка для сигналов с частично сформированным пучком посредством формирователя пучка ультразвуковой системы.
11. Способ по п. 1, дополнительно содержащий этап, на котором обрабатывают сигналы из элементов участка поверхности посредством микроформирователя пучка для формирования суммированного сигнала участка поверхности; и этап, на котором вводят суммированный сигнал участка поверхности в канал формирователя пучка ультразвуковой системы.
12. Способ по п. 11, дополнительно содержащий этап, на котором вводят сигналы из элементов участка поверхности в канал формирователя пучка ультразвуковой системы посредством матричного коммутатора.
13. Способ по п. 11, в котором этап формирования суммированного сигнала участка поверхности дополнительно содержит этап, на котором вводят сигналы из элементов участка поверхности в общую шину.
14. Способ по п. 11, в котором этап обработки сигналов из элементов участка поверхности дополнительно содержит этап, на котором задерживают сигналы из элементов.
| US5677491 A, 14.10.1997 | |||
| US5911221 А, 15.06.1999 | |||
| Устройство определения массы осажденного металла при гальваническом серебрении | 1987 |
|
SU1491913A1 |
| Способ обработки целлюлозных материалов, с целью тонкого измельчения или переведения в коллоидальный раствор | 1923 |
|
SU2005A1 |
| WO2011020104 A1, 17.02.2011. | |||

