Изобретение относится к области технических средств бесконтактного рентгеновского досмотра крупногабаритных объектов и может использоваться для обнаружения в них незаконных скрытых вложений (например, наркотиков, боеприпасов, оружия и др.) на таможенных и иных пунктах пропуска.
Известен способ сканирования контролируемых объектов веерообразным пучком рентгеновских лучей [1, с. 43-48]. Данный способ имеет очень высокую производительность контроля, обеспечивает простой способ записи рентгеновского изображения в цифровой форме, обеспечивает максимальную радиационную безопасность людей и контролируемых объектов, позволяет досматривать крупногабаритные грузы и транспортные средства, а также имеет высокие разрешающую способность и контрастную чувствительность.
Устройства, реализующие этот способ [1, с. 142-147] и [2, 3, 4], включают в себя конвейерную систему, обеспечивающую равномерное перемещение объекта контроля (ОК) относительно одного источника рентгеновского излучения (ИРИ), специальную диафрагму (коллиматор) для формирования веерообразного рентгеновского пучка, детекторную линейку для регистрации прошедших через объект рентгеновских лучей, а также электронную аппаратуру для преобразования рентгеновского изображения в цифровой код и для представления изображения объекта на экране монитора. Такие комплексы называются однопроекционными, и их существенным недостатком является получение одного двухмерного (плоского) рентгеновского изображения контролируемого объекта. Этот недостаток не позволяет оператору с высокой вероятностью выявлять (распознавать) в ОК незаконные скрытые вложения, что может привести к пропуску контрабанды.
Устройство [1, с. 48-50], реализующее также известный способ сканирования, включает в себя два ИРИ с соответствующими детекторными линейками. Источники излучения для наибольшего эффекта располагаются друг относительно друга под углом 90°. Такая компоновка источников излучения повышает вероятность распознавания предметов, находящихся в контролируемых объектах, примерно на 60%, что является важным достоинством. Главным недостатком этого двухпроекционного устройства является возможность получения хотя и двух, но все равно плоских рентгеновских изображений ОК и его содержимого.
Известен рентгеновский досмотровый комплекс, выполненный по способу получения объемного изображения в рентгеновских досмотровых комплексах [5], в котором с помощью одного ИРИ, перемещающегося по командам оператора по жесткой направляющей в форме части окружности относительно объекта контроля, можно получить большое количество плоских изображений ОК, полученных под разными углами, и на их основе сформировать объемное изображение данного объекта. Недостатком аналога является то, что в нем используется Г-образная детекторная линейка, в результате чего углы падения рентгеновских лучей на детекторы будут различными и случайными. Это, в свою очередь, может в ряде случаев вызвать появление ложных затененных областей на рентгеновском изображении ОК и привести к неправильному анализу оператором данного рентгеновского изображения.
Наиболее близким по техническому решению к предлагаемому изобретению является досмотровый рентгеновский комплекс [6]. В прототипе детекторная линейка имеет форму части окружности того же радиуса, что и направляющая, по которой перемещается ИРИ. Это приводит к тому, что в любом положении ИРИ на направляющей углы падения лучей на детекторы одинаковы и примерно равны 90°. Это исключает появление на изображении ОК ложных затененных участков.
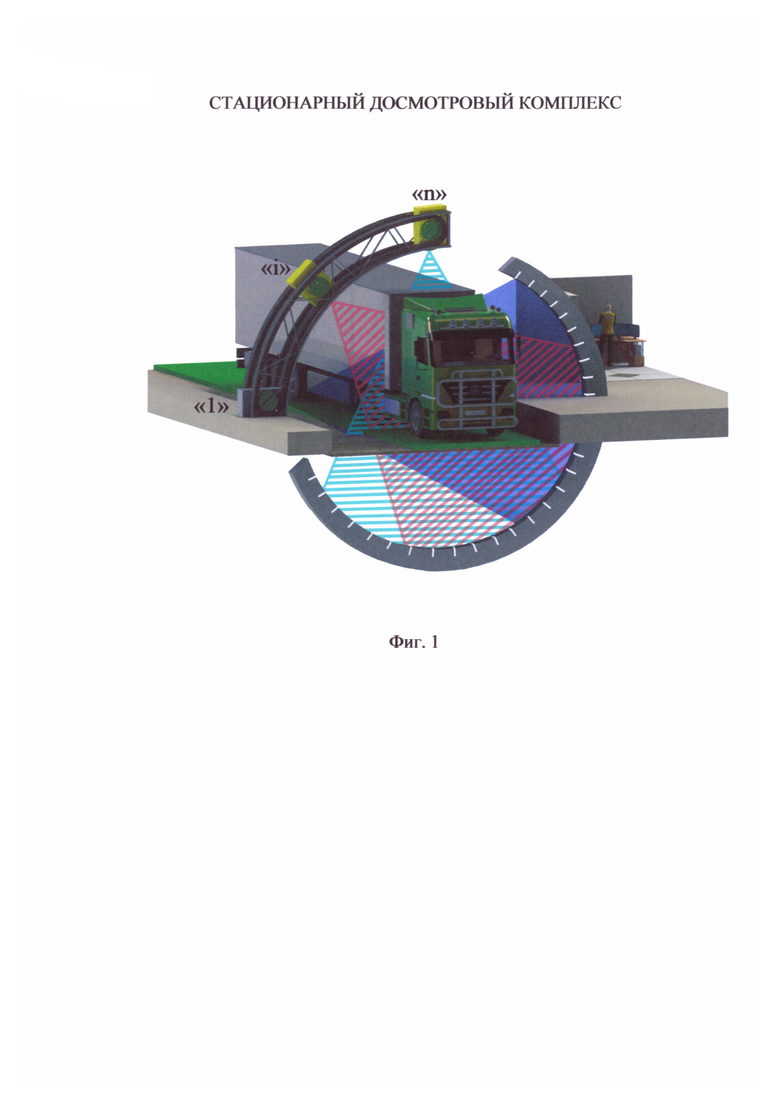
Недостатком прототипа является следующее. Длина детекторной линейки, повторяющей форму окружности, должна позволять регистрировать рентгеновское излучение в любом положении источника на направляющей. Анализ работы прототипа показал, что при этом длина детекторной линейки должна быть примерно 3/4 длины окружности. Радиус этой окружности должен быть не менее высоты объекта контроля. Если это крупногабаритный объект: автомобильные цистерны, фуры или трейлеры, авиационные или морские контейнеры и т.п., то радиус окружности должен быть порядка пяти метров (немного больше высоты крупногабаритного объекта). При таком радиусе длина детекторной линейки (или 3/4 длины окружности) может составить примерно 23 метра. Это предполагает размещение на линейке более тысячи детекторов (чаще - полупроводниковых), преобразующих энергию падающих на них рентгеновских лучей в соответствующий электрический сигнал. Внешний вид одного из возможных вариантов технических решений прототипа (например, таможенного стационарного инспекционно-досмотрового комплекса) представлен на фиг. 1. Из рисунка видно, что детекторная линейка такой длины и с таким количеством детекторов будет очень громоздкой и сложной. Кроме того, очевидно, что данная линейка будет еще и дорогостоящей конструкцией.
Целью изобретения является упрощение и удешевление как детекторной линейки, так и самого стационарного досмотрового комплекса.
Поставленная цель достигается тем, что в комплексе, содержащем досмотровый тоннель, внутри которого находятся источник рентгеновского излучения с коллиматором, перемещающиеся с помощью реверсивного электрического привода по жесткой направляющей в форме дуги длиной в четверть окружности с изменяющимся шагом, конвейерная система с объектом контроля и двумя ограничительными световыми барьерами, а также детекторная линейка, расположенная напротив источника рентгеновского излучения по другую сторону от конвейерной системы, а вне досмотрового тоннеля расположены блок управления, связанный с электрическим приводом, конвейерной системой и световыми барьерами, первый выход блока управления связан с первым входом аналого-цифрового преобразователя, второй вход которого подключен к выходам детекторов линейки, второй выход блока управления соединен с первым входом блока программной обработки информации, второй вход которого связан с выходом аналого-цифрового преобразователя, выход блока программной обработки информации связан с входом монитора, а оператор взаимодействует с монитором и пультом управления, подключенным к блоку управления, детекторная линейка имеет длину, равную длине дуги сектора, образованного крайними рентгеновскими лучами веерообразного рентгеновского пучка, и свободно перемещается в обе стороны внутри кожуха в форме части окружности, имеющего длину, позволяющую перемещаться детекторной линейке в нем так, чтобы регистрировать рентгеновское излучение во всем диапазоне движения источника рентгеновского излучения по направляющей, причем концы детекторной линейки с помощью двух гибких тросов, проложенных в соответствующих каналах, механически связаны с обеими сторонами источника рентгеновского излучения, а радиус кожуха равен радиусу жесткой направляющей.
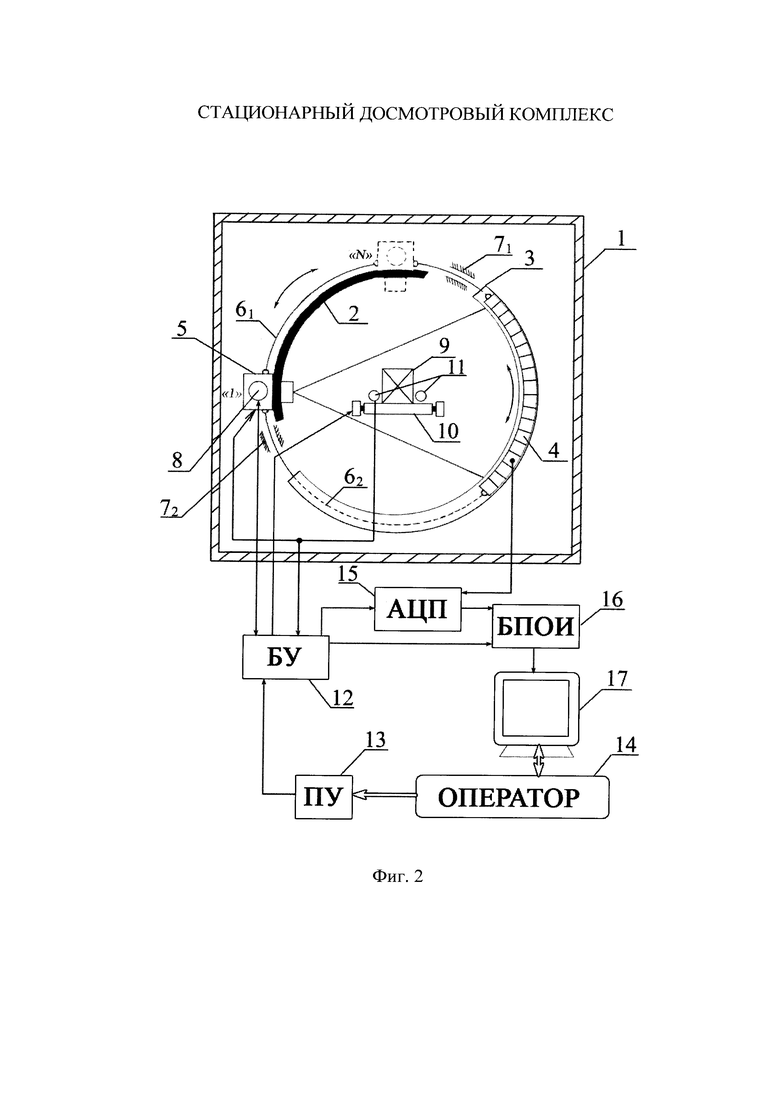
Принцип действия стационарного досмотрового комплекса поясняется фиг. 2, на которой представлены его конструкция и электрическая структурная схема, а также фиг. 3, на которой изображен фрагмент схемы комплекса, уточняющий принцип его работы.
Комплекс состоит из досмотрового тоннеля 1 (для досмотра крупногабаритных объектов это может быть корпус специального здания, защищающего людей от ионизирующего излучения). Внутри тоннеля (корпуса здания) расположена жесткая направляющая 2 в форме четверти окружности. Напротив направляющей в одной вертикальной плоскости установлен кожух 3, внутри которого свободно перемещается в обе стороны детекторная линейка 4. Кожух и детекторная линейка имеют форму также окружности того же радиуса, что и направляющая 2.
Длина детекторной линейки равна длине дуги сектора, образованного крайними рентгеновскими лучами узкого веерообразного пучка, который формируется коллиматором (щелевой диафрагмой) из исходного пучка источника рентгеновского излучения 5. Коллиматор на схеме не показан.
Длина кожуха 3 намного длиннее линейки и должна позволять перемещаться ей в нем таким образом, чтобы обеспечить регистрацию рентгеновских лучей во всем диапазоне перемещения ИРИ 5 по направляющей 2 (от 0° до 90°).
Источник излучения и детекторная линейка механически связаны между собой с помощью двух тросов 61 и 62, которые проложены внутри специальных каналов 71 и 72. Движение ИРИ и линейки происходит в одну и ту же сторону: если шаговый реверсивный электрический привод 8 перемещает ИРИ по направляющей по часовой стрелке, то трос 62 будет тащить детекторную линейку внутри кожуха также по часовой стрелке; если электрический привод перемешает ИРИ против часовой стрелки, то и детекторная линейка будет перемешаться в ту же сторону, но уже с помощью троса 61.
В центре окружности (образованной направляющей 2 и кожухом 3) находятся объект контроля 9, установленный на средство его перемещения 10 (пусть - на конвейерную систему) и два ограничительных световых барьера 11 с лучами света по обе стороны от ОК. Конвейерную систему приводит в движение электрический реверсивный привод, который отдельно на рисунке не показан. Источник излучения перемещается по дуге так, что при угле 0° (положение «1») он располагается строго сбоку от объекта контроля, а при угле 90° (положение «N») - строго сверху контролируемого объекта. Сигнал от световых барьеров поступает на блок управления (БУ) 12 и на включение (выключение) ИРИ 5. На блок управления поступают также команды с пульта управления (ПУ) (компьютерной клавиатуры) 13, с которым взаимодействует оператор 14. В свою очередь БУ 12 связан с реверсивным электрическим приводом 8 источника излучения и электрическим реверсивным приводом конвейерной системы (средства перемещения ОК) 10. Конечные положения привода 8 на направляющей 2 регистрируются, например, с помощью концевых контактов (на схеме не показаны), и информация об этом также поступает на блок управления 12. Кроме того, блок 12 подает команды на начало и окончание работы аналого-цифрового преобразователя (АЦП) 15 и блока программной обработки информации (БПОИ) 16. На АЦП с детекторной линейки 4 поступают аналоговые электрические сигналы для преобразования их в цифровой код, а выход АЦП связан с информационным входом БПОИ. Результаты работы БПОИ отображаются на экране монитора 17, с помощью которого оператор осуществляет анализ полученных изображений.
Каналы для тросов 71 и 72 необходимы для предохранения их от каких-либо механических воздействий и от спутывания.
Источник рентгеновского излучения включается только при непосредственном просвечивании ОК 9. Сигналы на включение и выключение источника излучения поступают от лучей световых барьеров 11. Лучи устанавливаются несколько выше конвейерной ленты. При движении ленты установленный на ней ОК последовательно пересекает эти лучи, обеспечивая, таким образом, функционирование досмотрового комплекса: включение и выключение источника излучения, начало и конец считывания показаний детекторной линейки, реверс конвейера и т.д.
В исходном положении ИРИ (положение «1») объект контроля расположен по одну сторону плоскости распространения веерных пучков за лучами световых барьеров 11.
Внутренняя часть кожуха (обращенная к центру окружности) должна быть выполнена из материала с минимальным коэффициентом поглощения рентгеновских лучей. Незначительное же поглощение (ослабление интенсивности) лучей никак не скажется на качестве рентгеновского изображения объекта контроля, так как это ослабление будет одинаковым для всего рентгеновского пучка лучей.
Комплекс работает следующим образом.
В исходном положении ИРИ 5 детекторная линейка 4 с длиной, равной длине дуги сектора веерообразного пучка рентгеновских лучей, автоматически с помощью гибких тросов 6, или 6 2 выставляется внутри кожуха 3 прямо напротив коллиматора источника излучения. При этом рентгеновское излучение будет попадать строго на детекторы линейки.
По команде оператора с ПУ 13 через БУ 12 поступает команда на электропривод конвейера 10 для начала равномерного перемещения ОК с малой постоянной скоростью. При пересечении объектом 9 луча первого светового барьера 11 включается ИРИ 5 и процесс сканирования начинается. Веерообразный пучок попадает на ОК и пересекает его по линии. Прошедший объект пучок, несущий в себе информацию о поглощении объектом рентгеновских лучей по этой линии, попадает на детекторную линейку 4. Ширина веерообразного пучка, падающего на детекторную линейку, обычно составляет 2…3 мм. Преобразование рентгеновского изображения в аналоговый электрический сигнал на всех детекторах происходит одновременно. По команде с БУ аналоговые сигналы (пусть - напряжение) последовательно преобразуются АЦП 15 в цифровые коды, поступающие в БПОИ 16. Полученные коды соответствуют интенсивности веерообразного рентгеновского излучения после пересечения им объекта контроля, т.е. в БПОИ в кодах формируется один столбец теневого изображения объекта.
При дальнейшем линейном перемещении ОК аналогично сканируются следующие его участки (линии) и в БПОИ формируется двумерная матрица, соответствующая изображению всего просвечиваемого объекта. Это изображение в кодах, полученное при угле 0°, хранится в памяти БПОИ.
После выхода ОК из зоны действия луча второго светового барьера 11 формируются команды на выключение источника излучения 5 и в блок управления 12. Блок 12 подает команду на электропривод 8 источника излучения и электропривод конвейера 10. При этом: привод 8 перемещает вверх по направляющей 2 источник излучения 5 на какой-то заранее выбранный оператором шаг (Ш1), а электропривод конвейера включается на реверс, в результате чего ОК начинает перемещаться в противоположную сторону. Очевидно, что трос 62 автоматически подтянет детекторную линейку 4 вниз на такой же шаг Ш1, т.е. рентгеновские лучи будут вновь попадать только на детекторы линейки.
При пересечении ОК луча первого барьера (но уже с другой стороны) вновь включается источник излучения 5 и процесс сканирования начинается, но уже под углом источника излучения по отношению к ОК (0°+Ш1). Все проходит аналогично изложенному выше. В результате в память БПОИ записывается в кодах второе плоское изображение ОК, полученное при угле (0°+Ш1).
После выхода ОК из зоны действия второго луча светового барьера 11 аналогично формируются команды на выключение источника 5 и в блок управления 12. При этом привод 8 перемещает источник 5 вверх по дуге еще на один шаг Ш, а электропривод конвейера вновь включается на реверс. Объект контроля начинает перемещаться в другую сторону. Аналогично трос 6 также еще подтянет детекторную линейку по часовой стрелке на такой же шаг.
При пересечении ОК первого луча светового барьера опять включается источник рентгеновского излучения и процесс сканирования начинается, но уже под углом ИРИ (0°+2Ш1). В результате в память БПОИ записывается в кодах третье изображение ОК, полученное при угле (0°+2Ш1).
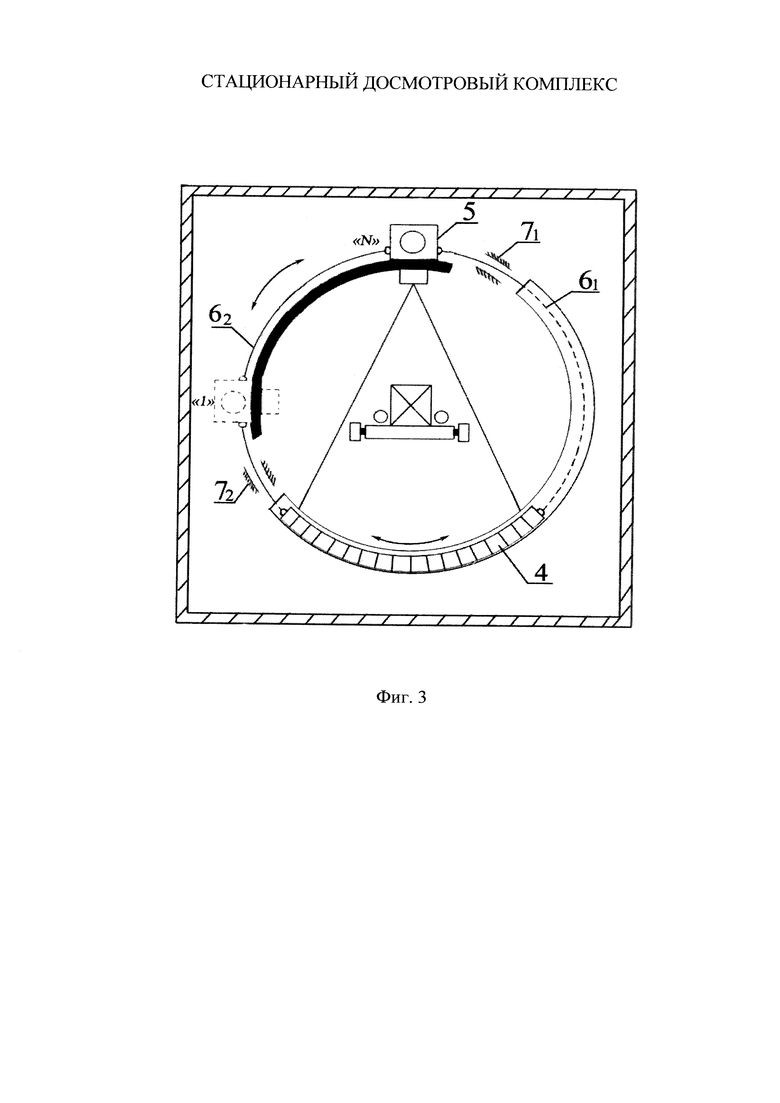
Далее все происходит аналогично вплоть до угла положения источника излучения, равного 90°. Сигнал в БУ о достижении источником излучения крайнего верхнего положения может формироваться соответствующим концевым контактом. На фиг. 3 показано соответствующее расположение детекторной линейки 4 внутри кожуха при данном положении источника излучения 5.
После записи в память БПОИ всех полученных плоских изображений ОК по команде из БУ (или от оператора) может начинаться процесс преобразования их в одно трехмерное (объемное) изображение ОК.
Все изображения (и плоские и объемное) выводятся на экран монитора 17, после чего начинается процесс их анализа оператором.
При сканировании второго объекта контроля все происходит аналогично. Отличие заключается в том, что источник излучения перемещается теперь сверху вниз (против часовой стрелки). Именно поэтому электропривод 8 реверсивный. Автоматически пропорционально детекторная линейка также будет подтягиваться против часовой стрелки, но только тросом 61.
При этом плоские изображения в кодах будут получаться:
- первое при угле 90°;
- второе при угле (90°-Ш1);
- третье при угле (90°-2Ш1) и так до угла 0°.
Сканирование третьего объекта контроля происходит аналогично сканированию первого объекта и т.д.
Шаг перемещения источника излучения может задаваться автоматически или вручную оператором. Величина шага может задаваться в зависимости от степени детализации ОК и отведенного времени проведения контроля.
При сканировании ОК под разными углами рентгеновское излучение, чтобы попасть на детекторы линейки, должно пройти не только через сам объект, но и через металлические элементы конструкции конвейера. В этом случае рентгеновское изображение этих элементов, назовем его фоном, для каждого фиксированного положения источника излучения будет постоянным; этот фон можно преобразовать и записать в цифровом виде в память без нахождения на транспортерной ленте объекта контроля. При сканировании же объекта записанный для каждого положения фон можно вычитать из полученных в цифровом виде реальных изображений. Это приведет к тому, что окончательно в память БПОИ будут записываться плоские изображения ОК в цифровом виде без какого-либо фона.
Известно, что от времени получения изображения объекта контроля и проведения оператором анализа информации зависит производительность досмотрового комплекса. При описанном алгоритме время получения плоских изображений и объемного изображения предметов будет, безусловно, существенным. Для ускорения процесса досмотра объектов, т.е. для повышения производительности данного комплекса, можно предложить следующий путь:
1. Первоначально источник излучения устанавливается в исходное положение (угол равен 0°), производится однопроекционное сканирование и на экран монитора выводится первое плоское боковое изображение ОК. Если никаких подозрений у оператора не возникло, то процесс анализа изображения на этом заканчивается.
2. Если при анализе первого бокового плоского изображения у оператора возникли подозрения, то он с пульта управления 13 через блок управления 12 переводит источник излучения сразу в крайнее верхнее положение (шаг равен 90°), производит вновь сканирование и на экран монитора выводится второе плоское изображение ОК - вид сверху. Если в этом случае у оператора никаких подозрений не возникло, то процесс анализа на этом также заканчивается.
3. Если при анализе второго плоского изображения у оператора возникли подозрения, то он с пульта управления может выставить любой (из заданного диапазона) удобный для анализа угол и получить третье плоское изображение. Если в этом случае у оператора отпали все подозрения, то процесс анализа на этом заканчивается.
4. Если же при анализе и третьего плоского изображения у оператора возникли подозрения, то он по предложенному выше алгоритму может далее проводить сканирование ОК, получить на экране монитора очередное плоское изображение, а также объемное изображение предметов, находящихся в нем. Очевидно, что именно после этого оператор с высокой вероятностью сможет определить по рентгеновскому изображению наличие или отсутствие незаконных скрытых вложений в контролируемом объекте.
5. Можно сразу получить объемное изображение ОК, применяя при этом большой шаг перемещения источника излучения. В случае появления подозрений шаг перемещения источника излучения можно сделать меньше и затем повторить процесс сканирования.
6. Современная аппаратура управления может работать по алгоритму, позволяющему получать объемное изображение не всего объекта контроля, а лишь какой-то его части, вызвавшей у оператора подозрение и т.д.
Предложенные пути уменьшения времени процесса контроля объектов без снижения его качества можно расценивать и как широкие функциональные возможности предложенного комплекса, позволяющего выявлять скрытые незаконные вложения любыми удобными для оператора приемами.
Кроме того, такому детальному и глубокому контролю можно подвергать не все ОК, а только те, которые попали под подозрение.
Таким образом, ввиду того, что в предлагаемом комплексе длина детекторной линейки существенно уменьшилась, т.е. заметно сократилось и количество дорогостоящих детекторов-преобразователей рентгеновского излучения, ее конструкция стала проще, а стоимость - намного меньше.
Источники информации
1. Кошелев В.Е. Рентгеновские методы и технические средства таможенного контроля: учебное пособие. - М: ООО "Бином-Пресс", 2003.
2. Рентгенографическая установка сканирующего типа (варианты). Патент РФ на изобретение № 2257639, 2005.
3. Комплекс рентгенографической инспекции. Патент РФ на изобретение № 2256905, 2005.
4. Рентгенотелевизионное устройство. Патент РФ на изобретение № 2204122, 2003.
5. Вербов В.Ф. и др. Способ получения объемного рентгеновского изображения в рентгеновских досмотровых комплексах. Патент РФ на изобретение № 2462101, 2011.
6. Вербов В.Ф. и др. Досмотровый рентгеновский комплекс. Патент РФ на изобретение № 2497104, 2013 (прототип).
| название | год | авторы | номер документа |
|---|---|---|---|
| ДОСМОТРОВЫЙ РЕНТГЕНОВСКИЙ КОМПЛЕКС | 2012 |
|
RU2497104C1 |
| СПОСОБ ПОЛУЧЕНИЯ ОБЪЁМНОГО ИЗОБРАЖЕНИЯ В РЕНТГЕНОВСКИХ ДОСМОТРОВЫХ КОМПЛЕКСАХ | 2010 |
|
RU2426101C1 |
| СТАЦИОНАРНЫЙ ИНСПЕКЦИОННО-ДОСМОТРОВЫЙ КОМПЛЕКС | 2023 |
|
RU2805289C1 |
| СТАЦИОНАРНЫЙ ИНСПЕКЦИОННО-ДОСМОТРОВЫЙ КОМПЛЕКС | 2021 |
|
RU2790954C1 |
| МОБИЛЬНЫЙ ИНСПЕКЦИОННО-ДОСМОТРОВЫЙ КОМПЛЕКС | 2020 |
|
RU2747472C1 |
| МОБИЛЬНЫЙ ИНСПЕКЦИОННО-ДОСМОТРОВЫЙ КОМПЛЕКС | 2020 |
|
RU2767164C1 |
| ИНСПЕКЦИОННО-ДОСМОТРОВЫЙ КОМПЛЕКС | 2018 |
|
RU2731683C2 |
| ИНСПЕКЦИОННО-ДОСМОТРОВЫЙ КОМПЛЕКС | 2021 |
|
RU2790940C1 |
| ИНСПЕКЦИОННО-ДОСМОТРОВЫЙ КОМПЛЕКС | 2021 |
|
RU2758189C1 |
| ИНСПЕКЦИОННО-ДОСМОТРОВЫЙ КОМПЛЕКС | 2023 |
|
RU2813217C1 |
Использование: для бесконтактного рентгеновского досмотра крупногабаритных объектов. Сущность изобретения заключается в том, что в комплексе применяется один источник рентгеновского излучения, который перемещается с изменяющимся шагом по направляющей в форме дуги длиной, равной четверти окружности. Веерообразный пучок лучей пронизывает движущийся с постоянной скоростью объект контроля. После облучения осуществляется регистрация пройденного через объект контроля излучения, преобразование его в цифровые коды с последующей компьютерной обработкой и представление на экране монитора плоских или объемных изображений объектов контроля. Детекторная линейка имеет длину, равную длине дуги сектора, образованного крайними рентгеновскими лучами веерообразного рентгеновского пучка, и свободно перемещается в обе стороны внутри кожуха, имеющего длину, позволяющую перемещаться детекторной линейке в нем так, чтобы регистрировать рентгеновское излучение во всем диапазоне движения источника рентгеновского излучения по направляющей. Концы детекторной линейки с помощью двух гибких тросов, проложенных в соответствующих каналах, механически связаны с обеими сторонами источника рентгеновского излучения, а радиус кожуха равен радиусу направляющей. Технический результат: упрощение детекторной линейки досмотрового комплекса. 3 ил. 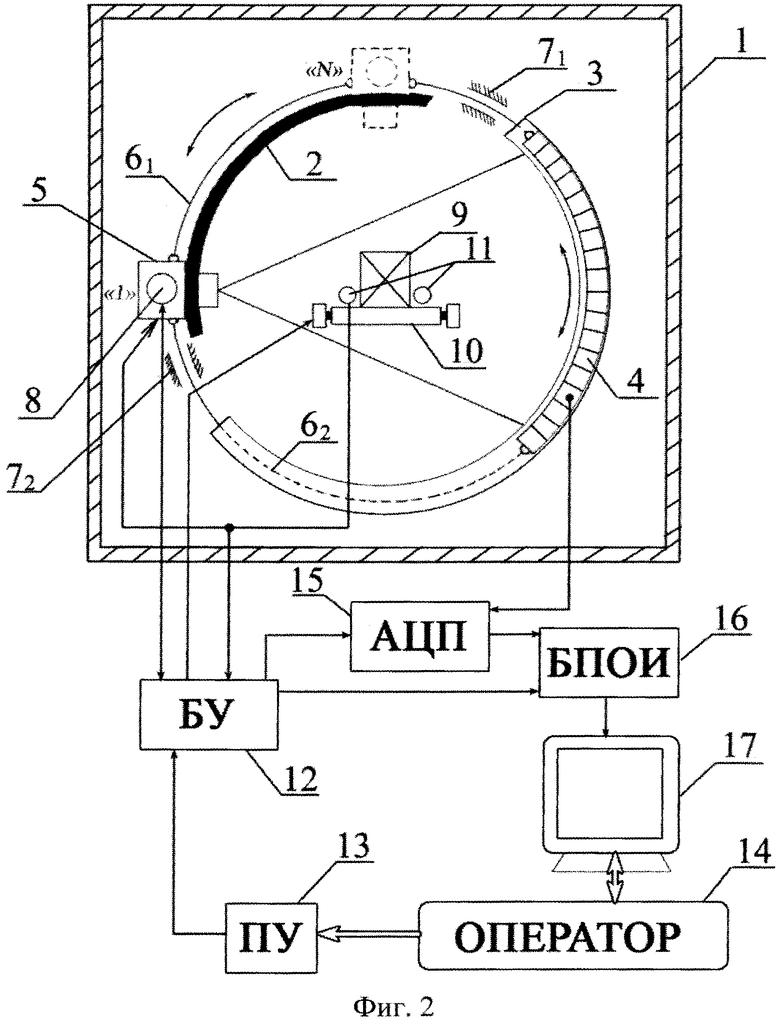
Стационарный досмотровый комплекс, содержащий досмотровый тоннель, внутри которого находятся источник рентгеновского излучения с коллиматором, перемещающиеся с помощью реверсивного электрического привода по жесткой направляющей в форме дуги длиной в четверть окружности с изменяющимся шагом, конвейерная система с объектом контроля и двумя ограничительными световыми барьерами, а также детекторная линейка, расположенная напротив источника рентгеновского излучения по другую сторону от конвейерной системы, а вне досмотрового тоннеля расположены блок управления, связанный с электрическим приводом, конвейерной системой и световыми барьерами, первый выход блока управления связан с первым входом аналого-цифрового преобразователя, второй вход которого подключен к выходам детекторов линейки, второй выход блока управления соединен с первым входом блока программной обработки информации, второй вход которого связан с выходом аналого-цифрового преобразователя, выход блока программной обработки информации связан с входом монитора, а оператор взаимодействует с монитором и пультом управления, подключенным к блоку управления, отличающийся тем, что детекторная линейка имеет длину, равную длине дуги сектора, образованного крайними рентгеновскими лучами веерообразного рентгеновского пучка, и свободно перемещается в обе стороны внутри кожуха в форме части окружности, имеющего длину, позволяющую перемещаться детекторной линейке в нем так, чтобы регистрировать рентгеновское излучение во всем диапазоне движения источника рентгеновского излучения по направляющей, причем концы детекторной линейки с помощью двух гибких тросов, проложенных в соответствующих каналах, механически связаны с обеими сторонами источника рентгеновского излучения, а радиус кожуха равен радиусу жесткой направляющей.
| ДОСМОТРОВЫЙ РЕНТГЕНОВСКИЙ КОМПЛЕКС | 2012 |
|
RU2497104C1 |
| СПОСОБ ПОЛУЧЕНИЯ ОБЪЁМНОГО ИЗОБРАЖЕНИЯ В РЕНТГЕНОВСКИХ ДОСМОТРОВЫХ КОМПЛЕКСАХ | 2010 |
|
RU2426101C1 |
| УСТРОЙСТВО И СПОСОБ ДЛЯ ОБНАРУЖЕНИЯ НЕРАЗРЕШЕННЫХ ПРЕДМЕТОВ | 2000 |
|
RU2253861C2 |
| US 2005276376 A1, 15.12.2005 | |||
| Устройство для измерения хроматической дисперсии одномодовых волоконных световодов | 1988 |
|
SU1645868A1 |
| US 5182764 A, 26.01.1993. | |||

