Изобретение относится к океанологическим исследованиям при оценке состава взвеси в водной среде путем измерения оптических характеристик смеси как в пробах, так и при погружении измерительного устройства непосредственно в исследуемую жидкую среду, может найти применение при определении размерно-количественных характеристик взвешенных в воде частиц планктона, а именно, при получении информации о пространственно-временных неоднородностях распределения планктона в водной среде в реальном масштабе времени, что может быть полезным при выявлении, например, рыбных скоплений.
В настоящее время в методике комплексных океанологических работ возник разрыв между широким внедрением современной гидрологической зондирующей аппаратуры и исследованиями планктона традиционными способами, где для определения размерно-количественных характеристик используется двухступенчатый процесс, согласно которому сначала проводят облов планктона по слоям (например: 0-10, 10-25, 25-50, 50-100 м и т.д. до необходимой глубины) или отбор проб батометром на фиксированных горизонтах, а затем выполняется камерная обработка проб под микроскопом. Этот процесс является чрезвычайно трудоемким и, главное, может затягиваться на длительное время - до нескольких суток на одну пробу. Кроме того, в результате может выясниться, что выбор слоев или горизонтов был произведен неправильно и наиболее важные характеристики были пропущены. Конечно, этот метод ни в какое сравнение не идет с использованием зондов, позволяющих получать в реальном масштабе времени оценки основных гидрофизичесих и гидрохимических параметров воды за какие-то 10-20 мин до глубин в несколько тысяч метров и с разрешением по глубине до долей метра.
Применение различных конструкций автоматических планктонособирателей, модификаций планктонных регистраторов, подводных фотоавтоматов, техники подводного телевидения, а также лабораторных методов исследования планктона с использованием автоматических счетчиков и вычислительной техники несколько сокращает этот разрыв, но не позволяет ликвидировать его полностью. При этом необходимо отметить, что используя все перечисленные методы, в принципе невозможно получать информацию о качественных и количественных характеристиках планктона в реальном масштабе времени.
Для оперативного исследования пространственного распределения планктона необходима аппаратура, позволяющая вести счет и классификацию организмов непосредственно в водной толще. С технической точки зрения автоматизированную классификацию планктона наиболее целесообразно проводить, используя различного типа датчики, позволяющие определять некие стандартные морфологические и физические признаки организмов. Это могут быть размеры, коэффициент формы, прозрачность, люминисценция, проводимость, звукоотражающие свойства, реакции на различные раздражители и т.д. Наиболее просто определяются размерно-количественные характеристики организмов, причем они непосредственно поддаются автоматизированной математической обработке; имеется достаточное число работ, позволяющих определить биомассу отдельных организмов по их длине и коэффициенту формы. Отсутствие точной видовой классификации организмов тут должно компенсироваться возможностью получения в реальном масштабе времени общих объемов информации.
В последнее время появились устройства для подобного рода измерений, основанные на использовании кондуктометрических или оптических датчиков. Эти устройства используются в зондирующем или буксируемом режимах. Взвешенный в воде планктон должен принудительно направляться и проходить через специальный проточный канал сечением 1-3 см2, являющийся частью конструкции таких датчиков. Так как для получения репрезентативных данных необходим анализ достаточно большого объема воды (не менее 0,01-0,005 м3), а отверстие канала мало, то необходимо для одного отсчета протекание достаточно продолжительного потока воды или использование специальных сетей для предварительной концентрации планктона. В первом случае не обеспечивается необходимое разрешение по глубине при работе в режиме зондирования, а во втором сети быстро засоряются и не позволяют правильно рассчитывать концентрацию планктона. В обоих случаях активные виды планктона распугиваются и стараются избежать попадания в отверстия для их облова. Все это в целом не позволяет получить реальную картину пространственного распределения планктона (особенно в микромасштабе) и его размерно-количественные характеристики.
Известен способ определения количества планктона, реализованный в устройстве, содержащем проточную измерительную камеру с фотоэлектронным умножителем и индуктивным датчиком, счетчик и средство для индикации (Патент ФРГ N 2049205, кл. 42 L 3/50, 1973).
Этот способ позволяет производить подсчет планктона на заданной глубине, однако несмотря на одновременное использование обоих методов система подсчета достаточно сложна и достоверность показаний невысока, кроме того, здесь также используется проточный канал.
Известен способ определения размерно-количественных характеристик взвешенных воде частиц, заключающийся в формировании реперного измерительного объема оптико-механическим путем в проточном канале за счет его пересечения перпендикулярным к нему параллельным потоком оптического излучения прямоугольного сечения и постоянной интенсивности, и принудительном направлении взвешенных в воде частиц в реперном объеме по траектории, перпендикулярной направлению потока излучения и большей стороне его прямоугольного сечения, и регистрации взвешенных в воде частиц (Патент США N 4637719, кл. G 01 N 21/85, 1987).
Устройство для реализации способа включает средство для генерации параллельного потока оптического излучения, средство для формирования оптическим путем реперного объема прямоугольного сечения, средство для принудительного направления взвешенных в воде частиц в реперном объеме, средство для перемещения реперного объема, средство для приема и преобразования оптического излучения в электрические сигналы и средство для регистрации изменения амплитуды электрических импульсов (Патент США N 4637719, кл. G 01 N 21/85, 1987).
Такой способ определения размерно-количественных характеристик взвешенных в воде частиц и устройство для его осуществления хотя и обеспечивают возможность определения размерно-количественных характеристик взвешенных в воде частиц, но не позволяют сканировать водное пространство, не нарушая естественного распределения планктона в микромасштабе.
Задача изобретения заключается в том, чтобы избежать упомянутых трудностей и предложить такой способ и устойство для его реализации, которые при относительной простоте обеспечивали бы проведение операций по определению размерно-количественных характеристик взвешенных в воде частиц, например планктона, без нарушения их естественного распределения в микромасштабе.
Это достигается благодаря тому, что в способе определения размерно-количественных характеристик взвешенных в воде частиц, заключающемся в формировании одного или более реперных объемов оптическим путем за счет передачи в заранее установленном направлении параллельного потока прямоугольного сечения импульсного оптического излучения постоянной интенсивности, перемещении реперного объема в природной среде по траектории, перпендикулярной направлению потока излучения и большей стороне его прямоугольного сечения, и регистрации взвешенных в воде частиц при появлении их в реперном объеме путем приема оптического излучения из реперного объема, преобразования его в электрические сигналы и анализе этих сигналов по амплитуде и длительности, предложено отношение размеров сторон прямоугольного сечения приравнять отношению максимальной и минимальной границ размерного диапазона регистрируемых частиц, а скорость перемещения реперного объема удерживать на уровне, не превышающем отношение длины его меньшей стороны сечения ко времени периода частоты следования импульсов оптического излучения.
Кроме того, предложено отфильтровывать принимаемые импульсы оптического излучения из реперного объема от постороннего светового излучения путем вычитания амплитуды сигнала, полученного во время отсутствия импульсов излучения, из амплитуды сигнала, полученного во время действия импульса.
Поставленная задача решается также благодаря тому, что устройство для определения размерно-количественных характеристик взвешенных в воде частиц, включающее средство для генерации параллельного потока импульсного оптического излучения, средство для формирования оптическим путем реперного объема прямоугольного сечения, средство для перемещения реперного объема, средство для приема и преобразования оптического излучения в электрические сигналы и средство для регистрации изменения амплитуды электрических импульсов, снабжено средством для определения разности между импульсным сигналом в отсутствии частиц и импульсным сигналом, полученным во время регистрации частиц, и средством, формирующим временной интервал на время регистрации частицы, при этом отношение размеров сторон прямоугольного сечения реперного объема выбирают равным отношению максимальной и минимальной границ размерного диапазона регистрируемых частиц.
Кроме того, устройство предложено дополнительно снабдить средством для регистрации величины сигнала, характеризующего оптические свойства водной среды перед регистрацией взвешенной частицы, и средством для измерения разницы между величиной, характеризующей оптические свойства водной среды, и амплитудой сигнала для каждого импульса в течение сформированного интервала времени.
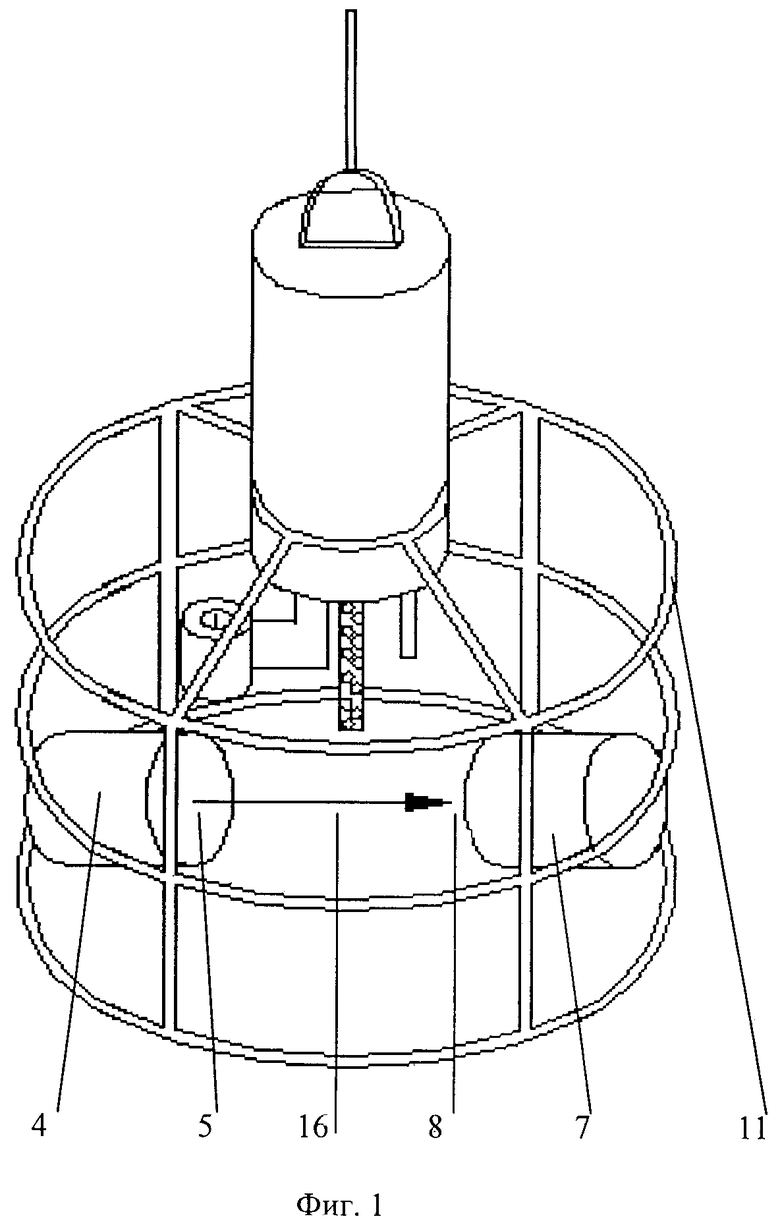
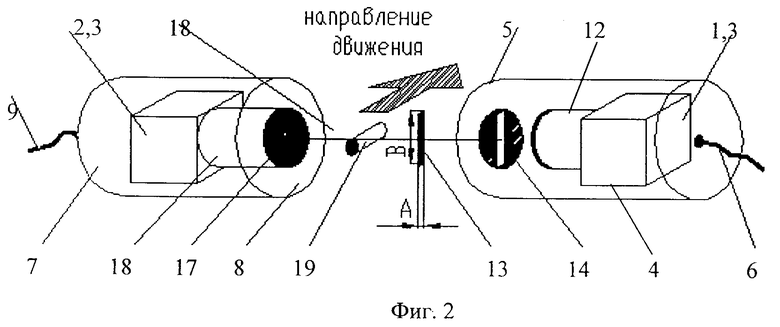
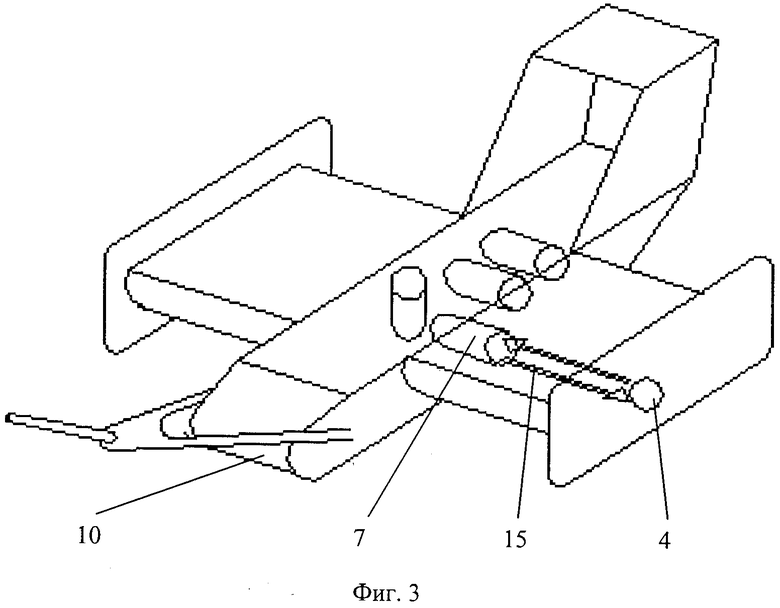
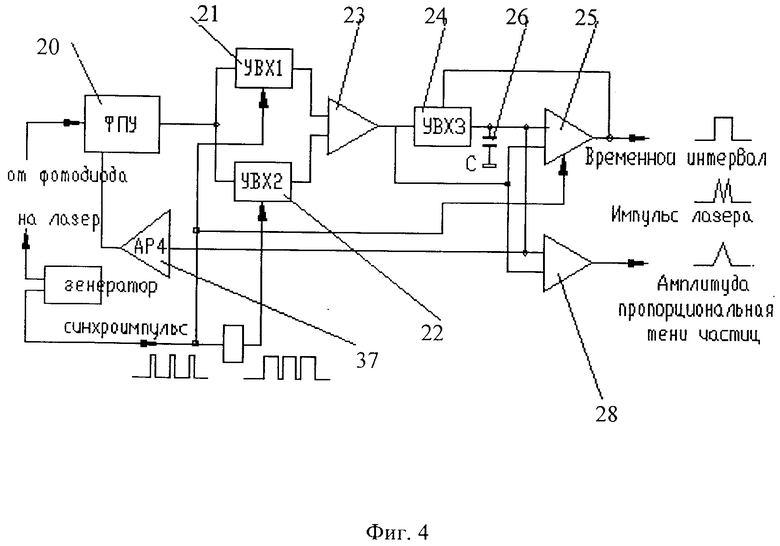
На фиг. 1 показан общий вид погружаемой части устройства для определения размерно-количественных характеристик взвешенных в воде частиц, установленной на СТД-зонде; на фиг. 2 изображен упрощенный поперечный разрез устройства; на фиг. 3 изображен общий вид устройства, установленного на буксируемом носителе; на фиг. 4 изображена электрическая схема, иллюстрирующая работу устройства.
Предложенный способ и созданное на его основе устройство для определения размерно-количественных характеристик взвешенных в воде частиц заключаются в формировании реперного объема путем передачи потока прямоугольного сечения импульсного оптического излучения постоянной интенсивности, регистрации взвешенных в воде частиц при появлении их в реперном объеме путем приема оптического излучения из реперного объема, который представляет собой своеобразную световую плоскость шириной 10-30 мм и толщиной 0,5-1 мм. Для формирования прямоугольного сечения возможно использование диафрагм с отверстием соответствующей конфигурации и размеров. Длина световой плоскости зависит от места расположения приемника излучения.
Прием оптического излучения из реперного объема может осуществляться под любым углом к направлению передаваемого излучения. При расположении фотоприемника под каким-либо углом к направлению излучения, не равным 180o, фотоприемник реагирует на отраженное от частиц излучение - используется режим измерения I - "белого на черном фоне". Большое достоинство этого метода заключается в отсутствии оптических юстировок и возможности компановки всего устройства в едином прочном корпусе. Расположение излучателя и фотоприемника напротив друг друга и на одной оси позволяет получать тень от частицы на фотоприемнике и реализует режим измерения II - "черного на белом фоне".
В обоих режимах фотоприемник преобразовывает принятое излучение в электрические сигналы, причем излучение, принимаемое в промежутке времени между передаваемыми импульсами, характеризует естественное световое поле исследуемой среды (посторонняя засветка, солнечная освещенность, различного рода люминисценция и др.), а на излучение, принимаемое во время передачи импульсов, дополнительно накладывается часть передаваемого излучения, имеющая переменную величину, степень изменения которой характеризует оптические свойства водной среды и возможное наличие в ней взвешенных частиц. Вычитание сигнала, полученного между импульсами, из сигнала, полученного во время действия импульсов, позволяет выделить сигнал, характеризующий характеризующий только оптические свойства водной среды и возможное наличие в ней взвешенных частиц.
Выделение монотонно изменяющейся составляющей из импульсного сигнала, характеризующего только оптические свойства водной среды и определяющего порог регистрации взвешенных частиц, позволяет обнаружить эти частицы при их появлении в реперном объеме путем регистрации скачкообразного изменения амплитуды электрических импульсов по отношению к определенному порогу, сравнивая два последовательно принятых импульса передаваемого оптического излучения.
Предлагаемое устройство предназначено для определения размерно-количественных характеристик взвешенных в воде частиц путем перемещения в море или другом водоеме с помощью СТД-зонда, определяющего глубину его погружения при вертикальном зондировании на дрейфовых станциях (фиг. 1) или при помощи стандартного буксируемого носителя на ходу судна (фиг. 3).
Устройство, созданное на основе предложенного способа состоит из излучателя 1 (фиг. 1-3) и плат 3 с электронными схемами, расположенными в цилиндрическом контейнере 4, имеющем на одном торце прозрачный иллюминатор 5, а на другом - герморазъем 6, к которому подводится питание и снимается информация в виде сигналов. В контейнере 7, аналогичном контейнеру 4, с иллюминатором 8 и герморазъемом 9 установлен фотоприемник 2 и платы 3 с электронными схемами.
Контейнеры 4 и 7 устанавливаются на раме 10 (фиг. 3) буксируемого носителя либо на элементы 11 ограждения (фиг. 1) конструкции зонда.
В качестве излучателя 1 используется импульсный полупроводниковый лазер, работающий в ближнем ИК-диапазоне на длине волны 910 нм. Частота импульсов излучения может быть выбрана в диапазоне 5-50 кГц. Это зависит от минимального размера регистрируемых частиц и максимальной скорости движения устройства. Излучатель расположен в фокусе объективна 12, формирующего параллельный поток излучения, диаметр которого равен диаметру выходного зрачка объектива.
Прямоугольное сечение луча 13, например размером 1х10 мм, обеспечивается диафрагмой 14 с соответствующим отверстием. Поток излучения проходит через иллюминатор 5 - исследуемую среду 15 или 16, иллюминатор 8 и далее попадает на светофильтр 17, который отсекает окружающий свет видимой области. Далее имеется собирающий объектив 18, в фокусе которого расположен фотоприемник 2, в качестве которого может быть использован кремниевый фотодиод.
Оптически сформированный реперный объем для данного устройства будет иметь величину, равную
1 мм х 10 мм х (300-500 мм) х 2 = 6000-10000 мм
При прохождении устройством расстояния величиной в один метр исследуемый объем составит 0,006-0,01 м, что вполне достаточно для репрезентативной оценки концентрации планктона в большинстве районов Мирового океана. В биологически бедных акваториях оцениваемый объем можно увеличивать за счет прохождения большей дистанции для необходимой оценки.
При пересечении реперным объемом частицы 19 (фиг. 2) на фотоприемнике появляется тень от нее. Сигнал с фотодиода будет пропорционален размеру тени вдоль большей стороны В прямоугольного сечения реперного объема (фиг. 2). Время пересечения частицы реперным объемом будет пропорционально размеру тени вдоль меньшей стороны А прямоугольного сечения при постоянной скорости движения всего устройства.
Функциональная электрическая схема обработки сигналов с фотодиода представлена на фиг. 4. Фотоприемный усилитель (ФПУ) 20 имеет управляемый коэффициент усиления, обеспечивающий необходимую чувствительность в широком диапазоне прозрачности, присущей большинству районов Мирового океана. Сигналы с ФПУ 20 поступают на два устройства выборки хранения (УВХ) 21 и 22, управляемые синхроимпульсами запуска лазера. УВХ1 21 выбирает и запоминает сигнал только во время импульса излучения, т.е. этот сигнал несет информацию о возможном наличии и размерах планктона в реперном объеме плюс информацию о световом поле и прозрачности среды (фон). УВХ2 22 обрабатывает сигнал между импульсами и характеризующий только фон. Далее дифференциальный усилитель 23 вычитает из сигнала от УВХ1 21 сигнал УВХ2 22. В результате получается сигнал, независящий от светового поля среды.
Амплитуды сигналов, характеризующих частицы одинаковых размеров, в водах разной прозрачности будут также различны. Для ликвидации этого явления необходима автоматическая регулировка ФПУ 20, следящая за изменениями прозрачности среды. Для выделения сигнала о прозрачности среды служит УВХ3 24. Так как в момент пересечения реперным объемом частицы разница между двумя смежными импульсами изменится скачкообразно, а изменение прозрачности достаточно монотонно (разница такого же порядка для прозрачности может быть на расстоянии тысяч импульсов), то для управления УВХЗ 24 используется компаратор 25, стробируемый синхроимпульсами запуска лазера. На время от импульса до импульса конденсатор (С) 26 поддерживает напряжение предыдущего импульса, которое для компаратора является опорным. Срабатывая при появлении импульса от частицы на выходе усилителя 23, компаратор 25 заставляет УВХЗ 24 запомнить величину предыдущего значения сигнала прозрачности без частицы (напряжение на конденсаторе 26 между импульсами) и поддерживает эту величину вплоть до момента окончания процесса пересечения частицы реперным объемом. Полученный сигнал через усилитель 27 поступает на вход управления чувствительностью ФПУ 20, который изменяет коэффициент усиления. Таким образом реализуется цепь АРЧ, позволяющая поддерживать постоянство величин сигналов от частиц равных размеров в водах различной прозрачности.
Кроме поддержки работы УВХЗ 24 выходной сигнал компаратора 25 можно использовать для оценки размеров частиц вдоль направления движения устройства при постоянной скорости движения реперного объема. Искомый размер будет являться функцией числа синхроимпульсов, укладывающихся в сформированный компаратором временной интервал, частоты синхроимпульсов и скорости движения реперного объема.
Для выделения величины сигнала от частицы служит вычитающий дифференциальный усилитель 28, на второй вход которого также подается сигнал от УВХЗ 24. Дальнейшая обработка полученного сигнала проводится пиковым детектором. Размер частицы вдоль большей стороны прямоугольного сечения будет являться функцией полученной величины и размера большей стороны (В) фиг. 2 прямоугольного сечения.
Реализация предложенного способа определения размерно-количественных характеристик взвешенных в воде частиц осуществляется следующим образом.
После формирования реперного объема его перемещают по траектории, перпендикулярной направлению потока излучения и большей стороне его прямоугольного сечения. Для просмотра водного пространства без пропусков необходимо осуществлять продвижение реперного объема со скоростью не более отношения длины меньшей стороны сечения (толщины световой плоскости) ко времени периода частоты следования импульсов оптического излучения.
Использование оптического способа формирования реперного объема позволяет сканировать водное пространство, не нарушая естественное распределение планктона в микромасштабе (в отличие от систем с принудительным отбором части воды с планктоном или концентрации планктона специальной сетью и направление искусственно созданного потока воды с планктоном в проточный канал с датчиком планктона), и не травмируя сами организмы. Применение излучения в ближней ИК-области позволяет не только ликвидировать возможность дневной засветки и исключить последствия любых типов люминисценции, но и предотвратить нарушение физиологического состояния организмов и, как следствие, нежелательные двигательные реакции организмов, т.е. распугивание.
В зависимости от конструкции и устройства фотоприемника, а также его места расположения относительно реперного объема и степени сложности электронных схем реализуется ряд возможностей предлагаемого устройства.
В режиме измерения I предлагаемое устройство предназначено для определения экстремальных значений в количественном распределении планктона для наводки стандартных орудий отбора проб планктона, регистрирует только количество частиц, хотя при наличии измерителя скорости перемещения реперного объема возможно определение размера частиц вдоль траектории движения устройства путем подсчета числа импульсов излучения, укладывающихся в интервал времени регистрации частицы. При этом на время регистрации частицы запоминается величина порога регистрации для определения момента окончания регистрации.
В режиме II и при использовании оценки разницы между площадью затемнения фотоприемника частицей и общей площади сечения реперного объема как разницы между амплитудами принимаемых сигналов при наличии частицы и без нее можно определять размер частиц вдоль перпендикуляра к направлениям излучения и передвижения устройства. При этом необходимо поддерживать уровень порога на постоянной величине в широком диапазоне изменения прозрачности среды. Для этой цели служит цепь обратной связи, обеспечивающая автоматическую регулировку чувствительности фотоприемника.
В режиме II также при наличии измерителя скорости перемещения реперного объема возможно определение размера частиц вдоль траектории движения устройства аналогично режиму I.
Совместное использование перечисленных конструктивных решений для режима II позволяет определять площадь сечения частиц, плоскость сечения которой параллельна плоскости прямоугольного сечения оптического излучения.
Используя фотоприемную матрицу и число строк более двух, можно осуществлять непосредственную классификацию частиц по размерным группам, количество которых равно числу задействованных строк, которые, в свою очередь, определяют число параллельных реперных объемов. При этом дистанции от первого по пути движения пачки реперных объемов объема, считывающего сигнальным, до каждого из последующих (классификационных), являются границами размерных групп. Результатом измерения будет определение старшего классификационного объема, регистрирующего частицу в момент окончания ее регистрации сигнальным объемом, размер этой частицы будет меньше дистанции от сигнального объема до определенного объема и больше дистанции до предыдущего объема.
Изобретение относится к океанологическим исследованиям. Способ заключается в формировании реперного объема оптическим путем за счет передачи в заранее установленном направлении параллельного потока прямоугольного сечения импульсного оптического излучения постоянной интенсивности. Сформированный реперный объем перемещают по траектории, перпендикулярной направлению потока излучения и большей стороне его прямоугольного сечения, и регистрируют взвешенные в воде частицы при появлении их в реперном объеме путем приема оптического излучения из реперного объема под любым углом к нему. Оптическое излучение преобразуют в электрические сигналы и анализируют их и по амплитуде и длительности судят о размерах и количестве частиц. Предложено отношение размеров сторон прямоугольного сечения приравнять к отношению максимальной и минимальной границ размерного диапазона регистрируемых частиц, а скорость перемещения реперного объема удерживать на уровне, не превышающем отношение длины его меньшей. стороны сечения ко времени периода частоты следования импульсов оптического излучения. Устройство снабжено средством для формирования реперного объема заданной конфигурации, а также средством для определения разности между сигналом в отсутствии импульсов и сигналом, полученным во время действия импульсов, и средством, формирующим временной интервал на время регистрации частицы. Формирование реперного объема оптическим путем и заданной конфигурации обеспечивает проведение операций по определению размерно-количественных характеристик взвешенных в воде частиц без нарушения их естественного распределения, а также получение информации о распределении планктона непосредственно в среде обитания. 2 с. и 8 з.п.,ф-лы, 4 ил.