ОБЛАСТЬ ТЕХНИКИ
Заявленное изобретение относится к интеллектуальным системам роботизированной сортировки хаотично расположенных объектов.
ПРЕДШЕСТВУЮЩИЙ УРОВЕНЬ ТЕХНИКИ
Из уровня техники известен, в частности, способ оптимизации роботизированной сортировки ТКО путём динамического планирования перемещений робота-сортировщика (см. RU 2755876, опубл. 22.09.2021) (1). Изобретение относится к интеллектуальным системам роботизированной сортировки ТКО. Изобретение может быть использовано в энергетике, химической промышленности, металлургии, коммунальном хозяйстве, экологии. Задача – повышение производительности систем роботизированной сортировки ТКО в случаях, когда объем входящего потока сортируемых объектов превышает максимальную производительность робота-сортировщика, путём снижения среднего времени, затрачиваемого на сортировку одного объекта, и, соответственно, увеличения количества сортируемых объектов в единицу времени, а также уменьшения количества «пропусков».
Подход, предложенный в (1) имеет ряд недостатков, такие как, невозможность сортировки определенным параметрам, например, по размеру и цвету.
Также аналогом заявленного изобретения является метод управления для машин, включая систему, компьютерную программу, сигнал данных и графический интерфейс (см. US8417363B2, опубл. 09.04.2013) (2). Метод управления группой машин, таких как роботы или машины для захвата и размещения, для захвата предмета из первой позиции и размещения предмета во второй позиции. Информация от датчика о местоположении первой позиции поступает на элемент управления, который отправляет сообщение от главного процесса на все машины. Сообщение включает в себя список всех первых позиций. Машины динамически и адаптивно обрабатывают каждую из первых позиций и информируют главный процесс, когда обрабатывается каждая первая позиция. Главный процесс, в свою очередь, информирует все машины о том, что данная первая позиция была обработана. Также описаны система, компьютерная программа и графический пользовательский интерфейс.
Метод управления по (2) наиболее подходит для конвейерной первичной сортировки, и как следствие не обладает высоким качеством сортировки.
Наиболее близким аналогом заявленного способа, по мнению заявителя, является система идентификации и планирования и метод выполнения заказов (см. CN111105181A, опубл. 05.05.2020) (3). Система идентификации и планирования включает в себя блок сканера, робота-манипулятора и управляющий сервер. Сервер управления обнаруживает первое множество элементов инвентаря в первой системе хранения инвентаря и определяет первый набор параметров положения для первого элемента инвентаря из обнаруженного первого множества элементов инвентаря относительно положения одного или более датчиков изображения в сборке сканера. Сервер управления генерирует множество планов маршрута комплектования для первого предмета запасов, где каждый план маршрута комплектования соответствует преобразованию определенного первого набора параметров позиции во второй набор параметров позиции по отношению к роботизированному манипулятору. Сервер управления дополнительно выбирает первый план пути комплектования из множества планов пути комплектования и управляет роботизированным манипулятором для выбора первого предмета запасов из первой системы хранения запасов на основе первого плана пути комплектования.
Предложенный аналог (3) наиболее близко подходит к решению проблем, решаемых заявленным изобретением, однако, по мнению заявителя проблема решается не самым эффективным способом, поскольку способ также не обеспечивает надежности и качества.
КРАТКОЕ ИЗЛОЖЕНИЕ ИЗОБРЕТЕНИЯ
Данное изобретение направлено на решение технической проблемы, связанной с созданием интеллектуальной системы роботизированной сортировки хаотично расположенных объектов, обеспечивающей надежность, качество сортировки и простоту выполнения и использования.
Техническим результатом изобретения является повышение качества сортировки, с сохранением простоты системы.
Технический результат достигается посредством создания интеллектуальной система роботизированной сортировки хаотично расположенных объектов содержащей робот-манипулятор, снабженный схватом, закрепленном в креплении схвата, камеру, закрепленную на роботе-манипуляторе, посредством крепления, захватывающую по меньшей мере, часть поверхности объекта, из по меньшей мере двух объектов размещенных в рабочем пространстве, при этом данные объекта передаются и сохраняются в устройстве хранения данных, по одному и/или нескольким признакам из группы: размер, цвет, координаты; система содержит программный процессор, соединенный с устройством хранения для анализа и принятия решения по объекту, который обеспечивает распределение объектов по выбранному признаку по по меньшей мере двум группам, посредством передачи информации на захваты робота-манипулятора.
В частном случае выполнения схват содержит две гибкие губки, выполненные из пластика для 3D-печати.
В частном случае выполнения губки выполнены в виде треугольной призмы, имеющей внешнюю стенку и внутренние параллельные ребра жесткости.
КРАТКОЕ ОПИСАНИЕ РИСУНКОВ
Сущность изобретения поясняется чертежами, на которых:
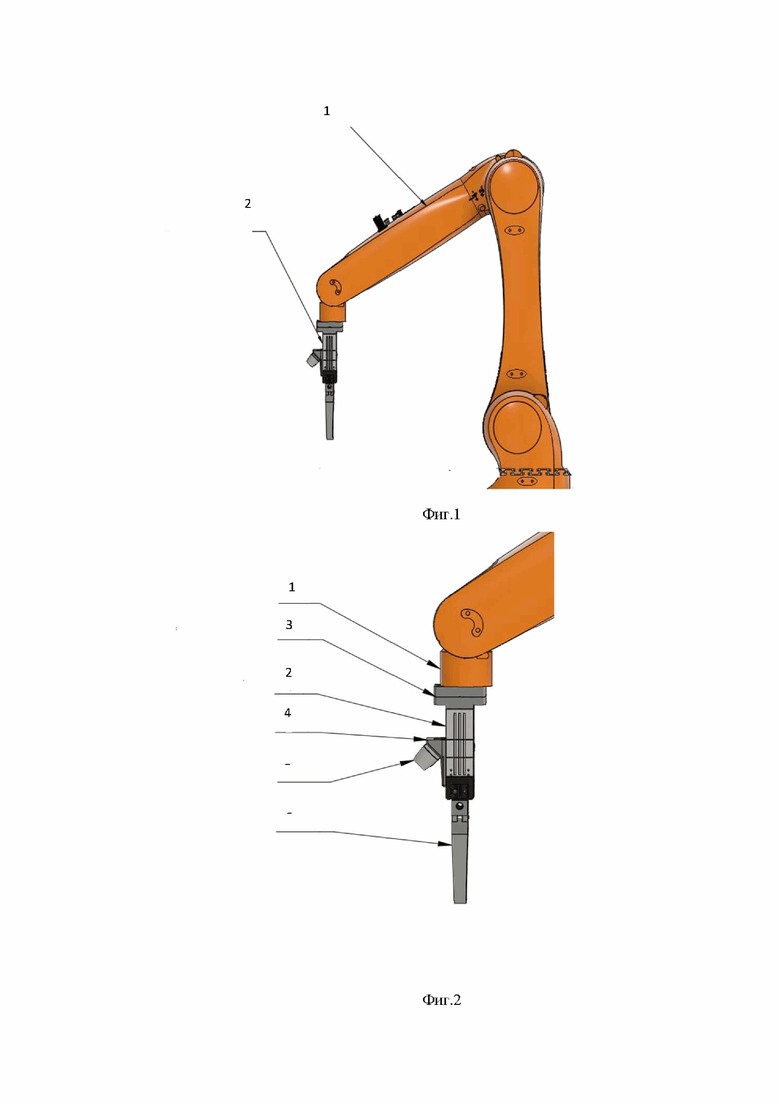
фиг.1 – схематическое изображение руки робота-манипулятора;
фиг.2 – приближенное изображение руки робота-манипулятора.
Позиции на фиг.1-2 обозначают следующее:
1 - рука робота-манипулятора;
2 - схват;
3 - крепление схвата;
4 - крепление камеры;
5 - камера;
6 - гибкие губки;
7- контроллер.
Эти чертежи не охватывают и, кроме того, не ограничивают весь объем вариантов реализации данного технического решения, а представляют собой только иллюстративный материал частного случая его реализации.
ВАРИАНТ ОСУЩЕСТВЛЕНИЯ ИЗОБРЕТЕНИЯ
Заявленная интеллектуальная система роботизированной сортировки хаотично расположенных объектов обеспечивает обнаружение и распознавание объектов заданного размера и цвета, расположенных случайным образом среди других объектов. Визуальное изображение, полученное камерой (5), установленной с помощью крепления камеры (4) на руке (1) робота-манипулятора, получается в режиме визуального слежения и включает три этапа грубый, тонкий и непрерывные режимы локализации. Полученное изображение поступает в устройство хранения данных и далее обрабатывается программным процессором, где изображения проходят обработку, анализ и классических алгоритмов компьютерного зрения.
На первом этапе происходит обучение модели. Происходит съемка нескольких изображений в различных режимах конфигурации для объектов, в том числе те, в которых объекты закрыты. Далее для обучения модели применялись такие приемы, как вертикальный и горизонтальный флип, вращение, кадрирование, перекос, освещение и добавление шума. Дополнения раскрывают модель разнообразия в наборе данных, таким образом делает модель более обобщенной.
Далее производится реализация модели. Обученная модель реализуется в конвейере задач как первый этап. С помощью RGB-камеры модель обнаруживает и локализует объект, который может быть расположен произвольно среди других предметов. Затем координаты изображения положения объекта преобразуются в координаты базы робота с помощью камеры. Робот получает команду двигаться в предполагаемое положение объекта, который необходимо захватить.
После того, как объект поднят, робот перемещает его в группу, определенную заданными параметрами, например цветом, размером или их комбинацией. В процессе выбора также определяются координаты объекта относительно схвата (2), закреплённого на руке посредством крепления (3). Система выбирает объект оптимально приближенный к захвату, также система может выбрать сразу несколько объектов, если они расположены рядом, и таким образом сват способен захватить несколько объектов, расположенных в рабочей зоне для перемещения в группу с заранее определёнными признаками.
Система в своем частном варианте может совершать прикидочную оценку весового показателя на основании размеров и средней плотности объекта.
Калибровка камеры и обработка изображений были выполнены в Python с использованием библиотек Open3D Калибровка «рука-глаз» осуществляется двумя сетками, размещенными перпендикулярно одна относительно другой.
Схват (2) выполнен в виде двух гибких губок (6). Конструкция губок позволяет легко захватывать и переносить предметы, как по одному, так и по нескольку. Гибкие губки выполняются на 3 D принтере из пластика. Каждая губка имеет форму треугольной пирамиды, внешняя сплошная стенка объединяет внутренние параллельные ребра жесткости.
Обобщенный алгоритм программы работы можно выразить с помощью следующего псевдокода:
1. Получение облака точек.
2. Фильтрация полученных данных.
3. Обработка и получение набора определенных объектов.
4. Выбор наилучшего объекта и определение его координат.
5. Передача определенных координат на робота.
6. Захват и перемещение определенного объекта.
7. ПО предназначено для использования совместно с индустриальным роботом.
ПРОМЫШЛЕННОЕ ПРИМЕНЕНИЕ
Предложенный способ предназначен для ряда применений, включающих применение маркетплейсами, логистическими компаниями, а также в пищевой промышленности, металлургии, машиностроении, мусороперерабатывающими заводами, метизными заводами и др.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ОПТИМИЗАЦИИ РОБОТИЗИРОВАННОЙ СОРТИРОВКИ ТКО ПУТЁМ ДИНАМИЧЕСКОГО ПЛАНИРОВАНИЯ ПЕРЕМЕЩЕНИЙ РОБОТА-СОРТИРОВЩИКА | 2020 |
|
RU2755876C1 |
| РОБОТИЗИРОВАННЫЙ АВТОМАТИЧЕСКИЙ КОМПЛЕКС ПО СОРТИРОВКЕ ТВЁРДЫХ КОММУНАЛЬНЫХ ОТХОДОВ НА ОСНОВЕ НЕЙРОННЫХ СЕТЕЙ | 2019 |
|
RU2731052C1 |
| СПОСОБ И СИСТЕМА ЗАХВАТА ОБЪЕКТОВ С ПОМОЩЬЮ РОБОТИЗИРОВАННОГО УСТРОЙСТВА | 2020 |
|
RU2745380C1 |
| РОБОТИЗИРОВАННАЯ КУХОННАЯ СИСТЕМА (ВАРИАНТЫ), СПОСОБ УПРАВЛЕНИЯ И КУХОННЫЙ МОДУЛЬ С ЕЁ ИСПОЛЬЗОВАНИЕМ (ВАРИАНТЫ) | 2015 |
|
RU2743194C1 |
| СПОСОБ И СИСТЕМА ЗАХВАТА ОБЪЕКТА С ПОМОЩЬЮ РОБОТИЗИРОВАННОГО УСТРОЙСТВА | 2019 |
|
RU2700246C1 |
| Способ выполнения манипуляции с объектом | 2019 |
|
RU2800443C1 |
| УСТРОЙСТВО ДЛЯ АВТОМАТИЗИРОВАННОГО СБОРА ТОМАТОВ | 2022 |
|
RU2796270C1 |
| АССИСТИРУЮЩИЙ ХИРУРГИЧЕСКИЙ КОМПЛЕКС | 2020 |
|
RU2720830C1 |
| СПОСОБ ОБРАБОТКИ ЛИСТОВОГО МАТЕРИАЛА, В ЧАСТНОСТИ БАНКНОТ, И РОБОТИЗИРОВАННЫЙ КОМПЛЕКС ДЛЯ ОБРАБОТКИ ЛИСТОВОГО МАТЕРИАЛА, В ЧАСТНОСТИ, БАНКНОТ | 2020 |
|
RU2737603C1 |
| КОМБИНИРОВАННОЕ ЗАХВАТНОЕ УСТРОЙСТВО РОБОТА-МАНИПУЛЯТОРА | 2019 |
|
RU2730343C1 |
Заявленное изобретение относится к интеллектуальным системам роботизированной сортировки хаотично расположенных объектов. Интеллектуальная система роботизированной сортировки хаотично расположенных объектов содержит робот-манипулятор, снабженный схватом, закрепленным в креплении схвата, камеру, закрепленную на роботе-манипуляторе посредством крепления, захватывающую по меньшей мере часть поверхности объекта, из по меньшей мере двух объектов, размещенных в рабочем пространстве, при этом данные объекта передаются и сохраняются в устройстве хранения данных, по одному и/или нескольким признакам из группы: размер, цвет, координаты; система содержит программный процессор, соединенный с устройством хранения для анализа и принятия решения по объекту, который обеспечивает распределение объектов по выбранному признаку по меньшей мере по двум группам, посредством передачи информации на захваты робота-манипулятора. Техническим результатом изобретения является повышение качества сортировки, с сохранением простоты системы. 2 з.п. ф-лы, 2 ил.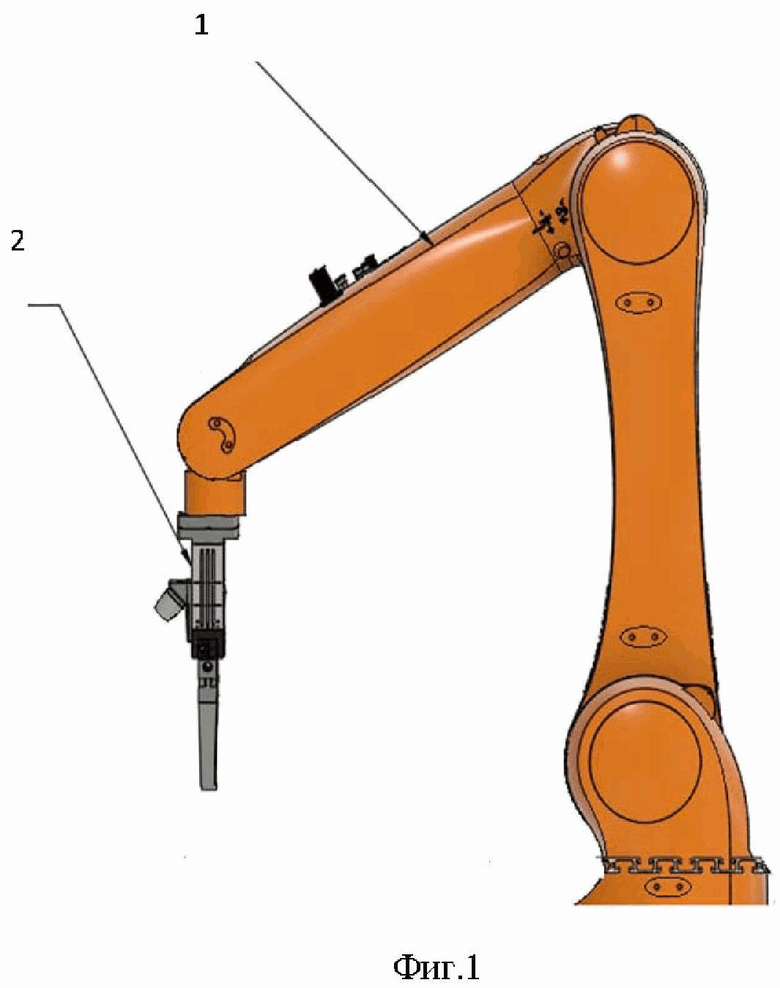
1. Интеллектуальная система роботизированной сортировки хаотично расположенных объектов, содержащая робот-манипулятор, снабженный схватом, закрепленным в креплении схвата, камеру, закрепленную на роботе-манипуляторе посредством крепления, захватывающую по меньшей мере часть поверхности объекта, из по меньшей мере двух объектов, размещенных в рабочем пространстве, при этом данные объекта передаются и сохраняются в устройстве хранения данных, по одному или нескольким признакам из группы: размер, цвет, координаты; система содержит программный процессор, соединенный с устройством хранения для анализа и принятия решения по объекту, который обеспечивает распределение объектов по выбранному признаку по меньшей мере по двум группам, посредством передачи информации на схват робота-манипулятора, который содержит две гибкие губки, выполненные в виде треугольной призмы, имеющей внешнюю стенку и внутренние параллельные ребра жесткости.
2. Интеллектуальная система по п.1, отличающаяся тем, что программный процессор обеспечивает дополнительный анализ весового показателя на основании размеров и средней плотности.
3. Интеллектуальная система по п.1, отличающаяся тем, что гибкие губки выполнены из пластика для 3D-печати.
| CN 114758236 A, 15.07.2022 | |||
| CN 114303643 A, 12.04.2022 | |||
| WO 9853961 A1, 03.12.1998 | |||
| CN 112454368 A, 09.03.2021. |

